國立臺灣大學電機資訊學院電機工程學系 碩士論文
Department of Electrical Engineering
College of Electrical Engineering and Computer Science
National Taiwan University Master Thesis
應用於電動機車之永磁同步電動機控制策略研究 Research of Permanent Magnet Synchronous Motor
Control Strategies in Electrical Motorcycle
劉呈軒
Cheng-Hsuan Liu
指導教授:劉志文 博士 Advisor: Chih-Wen Liu, Ph.D.
中華民國 109 年 7 月 July, 2020
致謝
碩士研究生涯中,受到許多師長及同儕的指導與鼓勵,首先,感謝指導教授 劉志文教授兩年來的指導及照顧,不僅在研究專業領域上給予建議,並學習到研 究精神與發現問題,也時常教導待人處事道理,使我在專業知識和解決問題能力 皆有成長。其次感謝黃世杰教授、郭政謙教授以及工研院梁佩芳組長在百忙之中 擔任口委,給予許多指正及建議,使本論文內容更加完善且充實。
在 228 電力實驗室中,先感謝棹沅、浩恩、聲揚、宇航、Rois、歐靖、逸 松、育琦、謝忱學長們的教學,讓我對研究有更多的認識,尤其是宇航學長於電 動機驅動控制領域給我一些寶貴的建議,以及實驗上協助與指導,讓電動機實驗 能夠順利完成,也於計畫報告撰寫方面給我很多幫助。亦感謝同屆的威銘、仕 凡、家灃、鄧維、Israjuddin,有這些同儕們陪著我一起修課,互相討論課業中遇 到的問題,讓我順利完成修課學分。接著感謝仁宏、君翰、孟芸、韋帆、鳳翎、
倚任學弟妹們的陪伴,讓我看到研究精神的傳遞,並於口試當天的幫忙,使口試 過程能順利完成。然後感謝同產學合作計畫工科海洋系的慕祈同學,在馬達驅動 控制程式上給我一些指導與不同想法,更感謝台灣台全股份有限公司,提供永磁 同步電動機及動力分析儀等設備,讓我有良好的研究器材與環境可以進行電動機 相關實驗。
最後要感謝家人及女友的支持,長期下來給予我經濟上與心靈上的幫助,在 無後顧之憂下完成研究,使我能夠面對及克服各種挑戰,在此感謝以上一路上幫 助過我的人,讓我有動力向前邁進,沒有你們的幫助,本論文難以順利完成。
摘要
本論文主旨為三相內藏式永磁同步電動機控制策略之設計及實現,此電動機 將永久磁鐵埋入於轉子內部,具有強健的機械結構,適合應用於高速運轉及高性 能電動機車驅動系統中,文中有介紹兩種電動機操作區域:定轉矩區及定功率 區,於定轉矩區採用每安培最大轉矩控制,選擇此控制有最小的電流,且產生最 大轉矩及最小的銅損,當反電動勢高於三相變頻器直流限制電壓,需藉由反向 d 軸電流弱化磁通鏈,因此於定功率區採用弱磁控制,延伸轉速操作範圍。在控制 器設計上,本論文採用模糊控制器取代傳統的比例積分控制器,藉由調整模糊控 制 器 之 參 數 區 間 , 使 得 永 磁 同 步 電 動 機 有 較 好 的 響 應 。 最 後 , 於 軟 體 MATLAB/SIMULINK 上建立不同控制策略應用在電動機驅動系統中,並使用德州 儀器 TMS320F28069M 數位信號處理器實現三相內藏式永磁同步電動機驅動系統 實驗,實驗結果顯示上述控制策略具有可行性。
關鍵字: 內藏式永磁同步電動機、每安培最大轉矩控制、弱磁控制、模糊控 制、電動機車
ABSTRACT
This thesis aims to design and implement the control strategies for three phase interior permanent magnet synchronous motor (IPMSM). IPMSM has a robust mechanical structure for permanent magnets inside the rotor, which can be applied to the electrical motorcycle drive system of high speed operation and high performance. The two motor operational regions will be mentioned in the thesis, including the constant torque region and constant power region. The Maximum torque per ampere (MTPA) control strategy is adopted to generate the maximum torque and minimize the copper losses in the constant torque region, which is a better choice for the minimum current.
When the back electromotive force (back EMF) is higher than three phase inverter DC limit voltage, the flux linkage needs to be weakened by demagnetizing the effect of the d-axis current. Therefore, the flux weakening control strategy is adopted to extend the speed operational region of IPMSM in the constant power region. In terms of controller design, the fuzzy controller is adopted to replace the conventional proportional integral (PI) controller in this thesis. By tuning the interval parameters of the fuzzy controller, IPMSM can receive better reviews. Finally, the different types of the control strategies established in the MATLAB/SIMULINK software are applied to IPMSM drive system.
Also, Texas Instruments TMS320F28069M digital signal processor is used to implement the experiments of three phase interior permanent magnet synchronous motor drive system. The results show the feasibility of the aforementioned control strategies.
Keyword:Interior permanent magnet synchronous motor, maximum torque per ampere control, flux weakening control, fuzzy control, electrical motorcycle
目錄
口試委員會審定書 ... i
致謝 ... ii
摘要 ... iii
ABSTRACT ... iv
目錄 ... v
圖目錄 ... viii
表目錄 ... xii
第一章 緒論 ... 1
1.1 研究動機 ... 1
1.2 研究貢獻與目的 ... 2
1.3 文獻回顧 ... 3
1.4 章節摘要 ... 5
第二章 永磁同步電動機 ... 7
2.1 前言 ... 7
2.2 永磁同步電動機械結構 ... 7
2.3 座標軸轉換 ... 9
2.3.1 靜止座標軸系統轉換 ... 9
2.3.2 同步旋轉座標軸系統轉換 ... 10
2.4 永磁同步電動機數學模型 ... 13
2.5 空間向量脈波寬度調變 ... 18
第三章 驅動控制策略設計 ... 27
3.1 前言 ... 27
3.2 電壓與電流限制 ... 28
3.3 磁場導向控制 ... 30
3.4 每安培最大轉矩控制 ... 31
3.5 弱磁控制 ... 35
3.5.1 前饋式弱磁控制 ... 37
3.5.2 反饋式弱磁控制 ... 39
第四章 模糊控制理論分析與設計 ... 41
4.1 前言 ... 41
4.2 模糊控制理論 ... 42
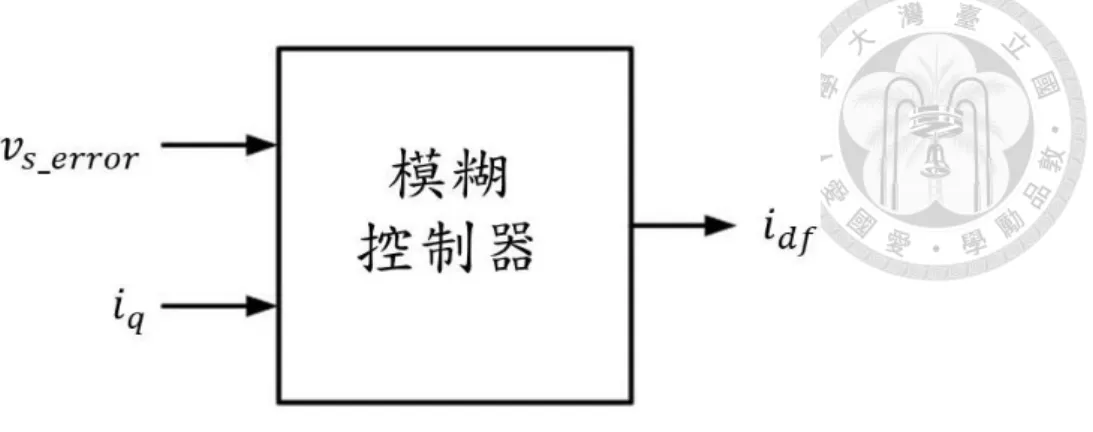
4.3 反饋式弱磁之模糊控制器設計 ... 49
4.3.1 模糊控制器之輸入與輸出變數 ... 49
4.3.2 模糊歸屬函數及模糊化 ... 50
4.3.3 模糊規則庫及推論方法 ... 52
4.3.4 解模糊化方式 ... 53
第五章 永磁同步電動機控制策略模擬結果 ... 55
5.1 前言 ... 55
5.2 電腦模擬說明 ... 55
5.3 電腦軟體模擬結果 ... 58
5.3.1 現有驅動控制策略模擬結果 ... 58
5.3.2 應用模糊控制器之弱磁控制模擬結果 ... 63
第六章 永磁同步電動機控制策略實驗結果 ... 67
6.1 前言 ... 67
6.2 電動機系統硬體電路及設備 ... 68
6.2.1 相電流回授電路 ... 69
6.2.2 三相變頻器與閘極驅動電路 ... 71
6.2.3 霍爾效應感測電路 ... 72
6.3 軟體程式設計規劃 ... 75
6.3.1 數位信號處理器 ... 75
6.3.2 程式設計流程 ... 76
6.4 實驗結果分析 ... 79
6.4.1 現有驅動控制策略實驗結果 ... 79
6.4.2 應用模糊控制器之弱磁實驗結果 ... 93
第七章 結論與未來工作 ... 103
7.1 結論 ... 103
7.2 未來工作 ... 104
參考文獻 ... 105
圖目錄
圖2.1 永磁同步電動機內部機械結構圖 ... 8
圖2.2 靜止座標軸與三相座標軸系統向量關係圖 ... 10
圖2.3 同步旋轉座標軸與靜止座標軸向量關係圖 ... 11
圖2.4 各系統座標軸轉換關係圖 ... 12
圖2.5 Park 及 Clarke 轉換矩陣及反轉換矩陣實現方塊圖 ... 12
圖2.6 永磁同步電動機定子及轉子側結構圖 ... 13
圖2.7 永磁同步電動機三相系統座標軸之定子側等效電路圖 ... 14
圖2.8 永磁同步電動機於d-q 軸等效電路模型 ... 17
圖2.9 三相六臂變頻器電路圖 ... 19
圖2.10 電壓向量與六個扇形區域 ... 21
圖2.11 扇形 I 區電壓向量圖 ... 23
圖3.1 永磁同步電動機之轉矩-轉速輸出特性圖 ... 27
圖3.2 電壓限制橢圓與電流限制圓示意圖 ... 29
圖3.3 磁場導向控制架構圖 ... 31
圖3.4 各轉矩對d 軸電流特性曲線圖 ... 32
圖3.5 d-q 軸電流分量示意圖 ... 32
圖3.6 每安培最大轉矩控制架構圖 ... 34
圖3.7 每安培最大轉矩控制軌跡圖 ... 35
圖3.8 d-q 軸座標平面上電流與磁通量向量 ... 36
圖3.9 於定功率區操作之d-q 軸座標平面上運行軌跡圖 ... 37
圖3.10 前饋式弱磁控制架構圖 ... 39
圖3.11 反饋式弱磁控制架構圖 ... 40
圖4.1 d-q 軸電流操作點於電壓與電流限制圓示意圖 ... 41
圖4.2 傳統集合與模糊集合示意圖 ... 43
圖4.3 模糊控制基本架構圖 ... 43
圖4.4 模糊變數空間論域分佈範圍示意圖 ... 44
圖4.5 離散化歸屬函數圖 ... 45
圖4.6 三角形歸數函數示意圖 ... 46
圖4.7 梯形歸屬函數示意圖 ... 46
圖4.8 高斯函數形歸數函數示意圖 ... 47
圖4.9 最小推論方式 ... 48
圖4.10 最大推理方式 ... 48
圖4.11 模糊控制輸入與輸出變數圖 ... 50
圖4.12 輸入及輸出變數歸屬函數示意圖 ... 51
圖4.13 模糊控制器內部架構圖 ... 53
圖4.14 模糊控制應用反饋式弱磁控制架構圖 ... 54
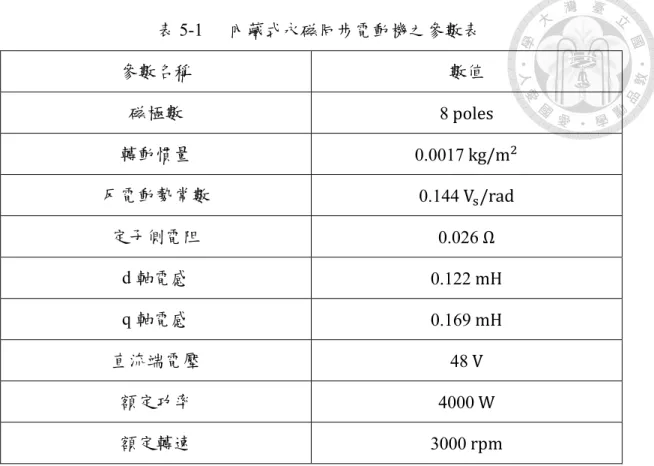
圖5.1 內藏式永磁同步電動機實體圖 ... 55
圖5.2 內藏式永磁同步電動機之控制系統模擬方塊圖 ... 57
圖5.3 直流端電壓與輸入電流命令響應圖 ... 58
圖5.4 無載時各控制策略轉速響應圖 ... 59
圖5.5 加載時各控制策略特性曲線圖 ... 61
圖5.6 反饋式弱磁控制d-q 軸電流平面模擬結果圖 ... 62
圖5.7 反饋式弱磁控制d-q 軸電流角度模擬結果圖 ... 63
圖5.8 反饋式弱磁與應用模糊控制器之弱磁控制特性曲線比較圖 ... 65
圖5.9 合成電壓vs與電壓誤差vs error_ 關係圖... 66
圖5.10 模糊區間變數與 q 軸電流關係圖 ... 66
圖6.1 電動機驅動系統實驗方塊圖 ... 67
圖6.2 電動機驅動系統硬體電路實體圖 ... 68
圖6.3 永磁同步電動機動力測試平台及設備 ... 69
圖6.4 電流感測電路實體圖 ... 70
圖6.5 相電流訊號數位化過程 ... 70
圖6.6 類比電壓與量測電流關係圖 ... 71
圖6.7 三相變頻器實體圖 ... 71
圖6.8 閘極驅動電路實體圖 ... 72
圖6.9 A、B 相方波訊號 ... 73
圖6.10 歸零用之脈衝訊號圖 ... 73
圖6.11 轉子初始位置波形圖 ... 74
圖6.12 LAUNCHXL-F28069M 數位訊號處理器實體圖 ... 75
圖6.13 Q24 格式表示圖 ... 76
圖6.14 CCS 軟體操作介面圖 ... 77
圖6.15 程式動作流程圖 ... 78
圖6.16 現有永磁同步電動機控制策略測試流程圖 ... 80
圖6.17 無載時各控制策略轉速響應實驗結果圖 ... 81
圖6.18 MTPA 控制各電流夾角比較實驗結果圖 ... 84
圖6.19 定轉矩區 FOC 與 MTPA 比較圖 ... 86
圖6.20 電動機 FOC 與 MTPA 之整體系統效率及輸出功率比較圖 ... 87
圖6.21 三相電流與電磁轉矩關係圖 ... 88
圖6.22 加載時各驅動控制策略電磁轉矩對轉速響應實驗結果比較圖 ... 90
圖6.23 加載時各控制策略 d 軸電流對轉速實驗結果圖 ... 91
圖6.24 加載時各控制策略 q 軸電流對轉速實驗結果圖 ... 92
圖6.25 反饋式弱磁控制 d-q 軸電流平面實驗結果圖 ... 93
圖6.26 弱磁比較實驗流程圖 ... 94
圖6.27 無載時各弱磁控制比較圖 ... 95
圖6.28 定轉速加載實驗結果比較圖 ... 96
圖6.29 加載時反饋式弱磁與應用模糊控制器弱磁控制比較圖 ... 97
圖6.30 應用模糊控制器之弱磁與反饋式弱磁電流比較圖 ... 99
圖6.31 不同電流命令之轉速多點加載測試比較圖 ... 101
圖6.32 各電流命令下之三相變頻器溫度結果圖 ... 102
表目錄
表2-1 各電壓空間向量之電壓表 ... 20
表2-2 六個扇形區域操作之電壓空間向量表 ... 22
表2-3 各扇形區域電壓空間向量操作時間及週期表 ... 23
表2-4 開關切換順序對照表 ... 25
表4-1 模糊規則庫 ... 52
表5-1 內藏式永磁同步電動機之參數表 ... 56
表6-1 永磁同步電動機測試方式表 ... 79
表6-2 永磁同步電動機定轉速加載實驗表 ... 82
表6-3 MTPA 控制固定角度實驗數據表 ... 82
表7-1 電流命令30 安培下各控制策略測試結果 ... 103
表7-2 不同電流命令下反饋式與模糊控制之弱磁結果 ... 104
第一章 緒論
1.1 研究動機
為了改善二氧化碳造成地球溫室效應、空氣汙染等問題,以及石化能源逐漸 枯竭,節能減碳成為近年來國際矚目議題,在世界各國政府都希望未來車輛能朝 向零碳排放的目標前進,像是歐盟制定燃油車的碳排放標準,甚至一些國家直接 宣布禁售燃油車的時間點,於各國政府政策推行下,加上現今民眾對節能減碳的 環保意識抬頭,各國車廠極力推動及研發乾淨的電動車以取代傳統燃油車輛,造 就電動車銷售量每年正以驚人的速度成長,而台灣方面行政院推動「空氣汙染防 制行動方案」,宣示將大幅度補助電動車,並訂定 2035~2040 年新售機車、汽車 全面電氣化之目標,在這波全球交通工具的革命中,台灣並非毫無優勢,由於台 灣自行車與機車的上中下游產業鏈完整,所以台灣電動機車產業的前景十分看 好,如果能把握好這次機會,可帶來許多商機與就業發展。
動力系統在電動機車佔有關鍵地位,其系統以電動機為核心,因此成為世界 各國重點發展對象,其中以永磁同步電動機最受世人歡迎,因轉子側繞組被永久 磁鐵取代,體積較感應電動機小,且無轉子損失,所以具有高效率、高功率密度 以及噪音小等優勢,其內部結構因永久磁鐵放置於轉子側位置不同,分為表面黏 貼式及內藏式,其中內藏式永磁同步電動機具有較高機械強度,高速時磁鐵不容 易飛脫,因此擁有較寬廣轉速操作範圍,與其他電動機相比更適合應用於高性能 驅動之電動機車動力系統中。
近年來隨著稀土材料大量開挖及提煉技術進步,高性能磁性材料研發快速並 應用於永久磁鐵中,結合電力電子元件及數位訊號處理器等重要硬體設備發展,
使得各種電動機控制理論用於永磁同步電動機之文獻紛紛發表在世界上,其中以 向量控制經常被使用於工業界及學術界中,最常被採用控制策略為磁場導向控制 (Field-Oriented Control, FOC),保持 d 軸電流為零,其控制簡單且容易實現,由於
內藏式永磁同步電動機轉矩特性與其他電動機相比,多一個磁阻轉矩,若適當地 控制 d 軸電流,便可提升電磁轉矩,其控制方法可採用每安培最大轉矩控制,除 此之外,當電動機轉速達到基準轉速時,電動機反電動勢趨近於三相變頻器所輸 出電壓限制值,導致電動機轉速無法提升,此時,需以控制 d 軸電流為反向值來 弱化磁場,消去永久磁鐵產生的磁通鏈,便能提升電動機轉速操作範圍,因此本 論文將針對內藏式永磁同步電動機之驅動控制弱化磁場加以研究及分析。
1.2 研究貢獻與目的
本論文針對應用於電動機車之永磁同步電動機作為主要研究對象,說明電動 機內部機械結構及分類,利用座標軸轉換技巧,詳細地推導內藏式永磁同步電動 機之數學模型,並結合空間向量脈波寬度調變理論,產生三相訊號驅動電動機,
在驅動控制策略方面,以基準轉速作為電動機控制分界條件,分界區域為定轉矩 區及定功率區,為了達成寬廣轉速操作範圍及良好的電磁轉矩輸出之控制目標,
於定轉矩區採每安培最大轉矩控制,而定功率區採用弱磁控制,並於本論文中詳 細地說明其驅動控制原理,也利用模糊控制理論,設計出模糊控制器,且結合傳 統弱磁控制架構,實現內藏式永磁同步電動機弱化磁場之應用。
在電動機模擬方面,於電腦模擬軟體MATLAB/Simulink 中建立電動機控制方 塊,依據內藏式永磁同步電動機數學模型,搭配各驅動控制策略演算法及空間向 量脈波寬度調變,觀察於不同驅動控制策略下,電動機轉速、轉矩、電流等特性 曲線之間差異,進行模擬分析,在電動機實驗方面,使用德州儀器公司生產的數 位信號處理器作為核心,於個人電腦軟體 CCS 操作平台上撰寫驅動控制策略程 式,結合電動機驅動硬體電路,實現內藏式永磁同步電動機寬廣速度操作範圍。
1.3 文獻回顧
永磁同步電動機具有高效率及高功率密度等優勢,因此近年來無論學術界或 工業界皆有研究人員投入於永磁同步電動機相關研究,在國內或國際上已有許多 文獻發表。由於永磁同步電動機驅動系統會有些限制,像是電動機內部反電動 勢,當電動機運轉到基準轉速時,反電動勢達到三相變頻器之電壓操作限制,將 無足夠電壓裕度驅動電動機,若要繼續提升操作轉速,需削弱電動機永久磁鐵產 生之磁通鏈,主要有兩種方式實現永磁同步電動機弱化磁場,一種方法為改善永 磁同步電動機內部機械結構設計,而另一種方法為改變永磁同步電動機驅動控制 策略演算法。
內部機械結構設計方面,可透過變更電動機內部結構或改變激磁方法[1]- [5],來提升永磁同步電動機弱化磁場能力,文獻[1]使用安裝於磁鐵表面之環形磁 鐵及八個磁通屏障來改變磁通路徑,以減少電樞繞組與電動機相連磁通。文獻[2]
使用一對分流齒埋入每個定子槽裡,減少電樞繞組產生的磁通勢,使得電動機轉 速提升。文獻[3]應用混合式激磁方法,將永久磁鐵與激磁繞組相互結合,以提升 永磁同步電動機磁通鏈弱化能力。
永磁同步電動機驅動控制演算法方面,為本論文實現弱化磁場提升轉速操作 範圍之方式,文獻[6]分析各種電動機驅動控制策略原理及優點,其中最常用的控 制策略為向量控制中磁場導向控制,文獻[7]中,利用電腦模擬軟體及數位訊號控 制,且結合空間向量脈波寬度調變法[8],實現永磁同步電動機之磁場導向控制模 擬及實驗,許多學者依據磁場導向控制策略架構為核心,提出控制 d 軸電流分量 演算法,來弱化永久磁鐵之磁通鏈,擴展電動機轉速操作範圍[9]。
文獻[10]回顧弱化磁場方法並以架構區分為四種型式,其中以前饋式及反饋 式兩種弱磁控制策略架構最為常見[11]-[20],文獻[11]針對兩者弱磁控制以電腦模 擬方式比較電動機電磁轉矩、轉速、電流特性曲線,前饋式弱磁控制[12]-[14],
利用三相變頻器電壓與電流限制圓之交集點求解出 d-q 軸電流命令值,其驅動控 制策略需要精準的電動機參數。文獻[12],考慮定子繞組中電阻壓降影響,研究 表面黏貼型式電動機弱磁控制,文獻[13]提出一種改進弱磁控制方法,以提高永 磁同步電動機驅動性能;而反饋式弱磁控制[15]-[17],藉由電動機高速電壓特 性,於電壓限制橢圓及電流限制圓範圍下操作,以 d-q 軸電壓命令之合成電壓向 量與電壓限制相比,產生誤差作為弱磁電流命令之依據,文獻[15]依據三相變頻 器非線性現象來補償電壓,提升定功率區電磁轉矩輸出大小,若電壓限制橢圓圓 心位於電流限制圓內,可採用每電壓最大轉矩控制[18]-[20],提升定功率區電磁 轉矩,文獻[18]針對加入每電壓最大轉矩控制方法與傳統反饋式弱磁控制相互比 較。
近年來現代控制理論逐步應用於永磁同步電動機弱磁控制中,其中以模糊控 制理論較為廣泛應用[21]-[24],由於比例積分控制器參數設定需要電動機系統模 型參數,才使電動機有良好的特性輸出,而模糊控制器只需專家經驗及人的直覺 來設計,且可得出良好的電動機特性,文獻[21]、[22]將模糊控制理論應用於比例 積分控制器更新參數,使電動機系統在較大變化下還具備強健性,文獻[23]以 d-q 軸電流命令值及誤差值作為控制器輸入,獲得弱磁電流值進行 d 軸電流大小調 整,減少電樞作用的影響。
1.4 章節摘要
本論文主要分為永磁同步電動機、控制理論、永磁同步電動機系統模擬及永 磁同步電動機系統實驗四個部分,各章節架構及內容說明如下:
第一章 緒論
簡述研究動機、貢獻與目的,並回顧永磁同步電動機弱化磁場提升轉速相關 文獻及說明本論文各章節內容簡介。
第二章 永磁同步電動機
探討不同永磁同步電動機特性與優缺點,以及不同座標軸間所使用的轉換矩 陣公式,推導出內藏式永磁同步電動機數學模型,作為後續章節參考之依據,並 介紹三相變頻器中最常用之空間向量脈波寬度調變驅動控制原理。
第三章 驅動系統控制策略設計
分析內藏式永磁同步電動機轉速與轉矩操作不同分成定轉矩區及定功率區,
且說明於定轉矩區中,磁場導向控制與每安培最大轉矩控制兩者差異,若要提升 電動機操作轉速至定功率區,將受到三相變頻器及電動機電壓、電流限制影響,
需採用弱磁控制提升轉速,本章也將說明弱磁控制前饋式及反饋式弱磁控制之間 差異。
第四章 模糊控制理論分析與設計
介紹模糊控制理論,將輸入及輸出變數依據歸屬程度進行模糊化,並與模糊 規則及推理方法結合,產生輸出變數且解模糊化,才能控制實際目標,本章節運 用模糊控制理論設計一個模糊控制器應用於反饋式弱磁控制架構,取代原先的比 例積分控制器。
第五章 永磁同步電動機控制策略模擬結果
針對永磁同步電動機系統進行模擬,利用電腦軟體MATLAB/Simulink 建立電 動機控制系統模型方塊,模擬第三、四章介紹之驅動控制策略,並比對模擬出來 電動機轉速、轉矩及電流等特性曲線進行分析說明,作為第六章電動機實驗結果 之依據。
第六章 永磁同步電動機控制策略實驗結果
介紹本論文所採用的硬體電路架構及量測設備,並說明數位信號處理器程式 撰寫流程圖,結合第三、四章所敘述之控制策略,實現內藏式永磁同步電動機驅 動控制系統,對比電動機於各種驅動控制策略之轉速、轉矩及電流等特性曲線,
進行實驗結果分析及說明。
第七章 結論與未來研究方向
對本論文模擬及實驗結果做出總結,並提出一些未來研究還可以繼續努力之 方向。
第二章 永磁同步電動機
2.1 前言
本章節將先介紹不同永磁同步電動機轉子側之間內部機械結構差異,再說明 各座標軸轉換矩陣公式,並推導內藏式永磁同步電動機之數學模型,最後說明驅 動電動機之三相變頻器空間向量脈波寬度調變實現原理,以作為後續章節參考之 依據。
2.2 永磁同步電動機械結構
永磁同步電動機其轉子磁場由永久磁鐵提供,並與定子磁場交互作用產生電 磁轉矩,故無需額外激磁繞組,無轉子損失問題,因此具備體積小、效率高以及 噪音小等優點,亦沒有碳刷、換向片等機械元件,所以無需定期保養與維護,且 其轉子與旋轉磁場同步,故無滑差問題,隨著電力電子技術進步,使得學術界及 產業界大量投入永磁式同步電動機驅動控策略相關研究,主要應用場合於高性能 及高精度工業設備中。
圖2.1 所示為永磁同步電動機內部機械結構圖[25],由三個部分組成,從外而 內依序為定子、空氣隙、轉子,依據磁鐵放置位置之不同,分為表面黏貼型式 (surface permanent-magnet, SPM)及內藏式(interior permanent-magnet, IPM),兩者電 動機動態特性及應用場合有不同之處,其優缺點依序說明如下:
圖 2.1(a)所示為表面黏貼型式電動機內部機械結構圖[25],其內部機械結構將 永久磁鐵黏貼於轉子表面,製作過程容易、價格低廉,故機械強度較為低,電動 機高速運轉時,永久磁鐵可能有飛脫的風險,只適用於小功率及中、低轉速場 合,此外,電動機內部結構具有對稱性,因此空氣隙均勻分佈,使得直軸電感值
Ld與交軸電感值Lq相等,應用於電動機驅動控制策略上較簡單,且轉矩漣波小。
圖 2.1(b)所示為內藏式電動機內部機械結構圖[25],其內部機械結構將永久磁 鐵埋入於轉子層內,故機械結構具有強健性,適合應用於大功率及高速運轉或經 常正反轉場合,此外,由於電動機內部結構不對稱,導致空氣隙不均勻分佈,具 有凸極效應,使得交軸電感值Lq大於直軸電感值Ld,因此有磁阻轉矩產生,若適 當地控制電動機便能獲得較高電磁轉矩輸出,於電動機驅動控制方面,可利用座 標軸轉換技巧,來進行數學模型分析及推導,為了得到較高電磁轉矩輸出量,本 論文採用內藏式永磁同步電動機作為模擬及實驗之對象。
(a)
(b)
圖2.1 永磁同步電動機內部機械結構圖 (a)表面黏貼式(b)內藏式
2.3 座標軸轉換
由於永磁同步電動機為三相交流非線性時變系統,其數學模型公式推導相當 繁雜,不易於電動機系統特性分析,若直接數學模型公式推導,會有龐大的數學 運算式,為了便於系統分析,需透過座標軸轉換技巧,將原三相座標軸系統,轉 換至兩相座標軸系統,便可簡化永磁同步電動機之數學模型,也利於將耦合項進 行解耦合,本小節將說明兩相系統之靜止座標軸及同步旋轉座標軸,與三相系統 之轉換矩陣及反轉換矩陣關係式。
2.3.1 靜止座標軸系統轉換
靜止座標軸與三相座標軸系統向量關係圖,如圖 2.2 所示,旋轉角速度e為 0,靜止座標軸
軸與三相系統座標軸 a 軸相互平行,而 軸與
軸相互垂直,若將三相座標軸系統之物理量投影至靜止座標軸上,三相系統便可轉換成兩相系 統,彼此座標轉換矩陣及反轉換矩陣關係式,可表示於式(2.1)及式(2.2)[26]。
0
0
1 1 1 2 2
2 3 3
3 0 2 2 1 1 1 2 2 2
a a
b b
c c
f f f
f f T f
f f f
− −
= − =
(2.1)
1 0
0 0
1 0 1
1 3
2 2 1
1 3
2 2 1
a b c
f f f
f f T f
f f f
−
= − =
− −
(2.2)
其中
𝑓𝑎𝑏𝑐為三相座標軸系統上之物理量,表示三相電流、電壓或磁通鏈 𝑓𝛼𝛽0為靜止座標軸上之物理量,表示電流、電壓或磁通鏈
𝑇𝛼𝛽0為靜止座標軸與三相座標軸系統轉換矩陣,又稱克拉克(Clarke)轉換矩陣 𝑇𝛼𝛽0−1 為靜止座標軸與三相座標軸系統反轉換矩陣,又稱克拉克(Clarke)反轉換 矩陣
圖2.2 靜止座標軸與三相座標軸系統向量關係圖
2.3.2 同步旋轉座標軸系統轉換
同步旋轉座標軸與靜止座標軸向量關係圖,如圖 2.3 所示,同步旋轉座標軸 之d 軸及 q 軸以旋轉角速度e旋轉,d 軸與
軸夾角為同步旋轉角度e,q 軸與 d 軸相互垂直,若將靜止座標軸之物理量投影至同步旋轉座標軸上,便能控制 d-q 軸上之物理分量,進一步影響電動機動態特性響應,彼此座標轉換矩陣及反轉換 矩陣關係式,可表示於式(2.3)及式(2.4)[26]。cos sin sin cos
d e e
q e e
f f f
f f T f
= =
−
(2.3)
cos sin 1
sin cos
d d
e e
q q
e
f f
f T
f f
f
− −
= =
(2.4)
其中
f為靜止座標軸上之物理量,表示電流、電壓或磁通鏈
fdq為同步旋轉座標軸上之物理量,表示電流、電壓或磁通鏈
T為同步旋轉座標軸與靜止座標軸轉換矩陣,又稱派克(Park)轉換矩陣
T−1為同步旋轉座標軸與靜止座標軸反轉換矩陣,又稱派克(Park)反轉換矩陣
e edt
=
為同步旋轉角度與同步旋轉轉速之關係式圖2.3 同步旋轉座標軸與靜止座標軸向量關係圖
綜合本小節以上兩者座標軸系統轉換之敘述,將圖2.2 及圖 2.3 靜止座標軸、
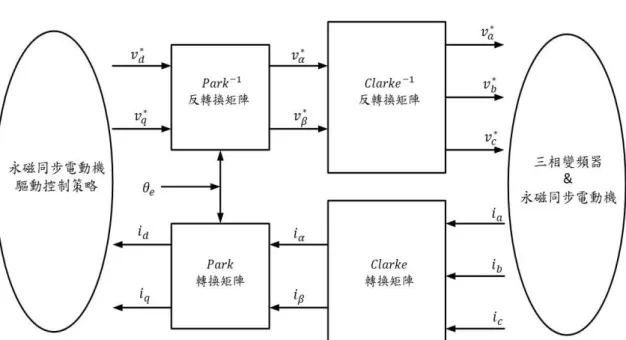
同步旋轉座標軸與三相座標軸系統之向量關係圖結合而成,如圖 2.4 所示,轉換 與反轉換矩陣關係,將可由圖2.5 所示之 Park 及 Clarke 轉換矩陣及反轉換矩陣實 現方塊圖,經由座標軸轉換矩陣得出所需之電壓及電流,並運用於後續章節電動 機驅動控制策略中。
圖2.4 各系統座標軸轉換關係圖
圖2.5 Park 及 Clarke 轉換矩陣及反轉換矩陣實現方塊圖
2.4 永磁同步電動機數學模型
若要控制永磁同步電動機,得了解其電動機動態響應特性及數學模型,因永 磁同步電動機為三相交流非線性時變系統,其數學模型推導相當複雜,需經由上 小節所敘述之座標軸轉換技巧,電動機數學模型將可簡化,由原三相交流系統轉 換為兩相座標軸系統,以便於實現電動機驅動控制策略及理論分析,永磁同步電 動機定子及轉子側結構圖,如圖 2.6 所示[9],其中定子側由三相繞組所組成,繞 組間彼此相差 120 度空間向量,而轉子側由永久磁鐵組成,並與定子側繞組激磁 產生磁場,其磁場方向與同步旋轉座標軸之 d 軸平行且同方向,三相系統 a 軸與 同步旋轉座標軸d 軸之夾角為同步旋轉角度e。
圖2.6 永磁同步電動機定子及轉子側結構圖
當電動機運轉時,轉子側永久磁鐵亦跟著旋轉,產生切割磁場於定子側線 圈,且形成反電動勢,其永磁同步電動機三相系統座標軸之定子側等效電路圖表 示於圖2.7 中[27],以此圖作為永磁同步電動機數學模型分析及推導之依據,其推 導過程中忽略渦流損與磁滯損、磁飽和現象、無阻尼繞組及將電動機反電動勢為 正弦波等基本假設。
圖2.7 永磁同步電動機三相系統座標軸之定子側等效電路圖
電動機三相定子繞組具有對稱性,因此三相電阻與電感以固定值假設,即為
s a b c
R =R =R =R 與Ls =La =Lb =Lc,依據電學柯希荷夫電壓定律,可將永磁同步 電動機三相系統座標軸之電壓方程式表示於式(2.5) [27]。
0 0
0 0
0 0
a s a a
b s b b
c s c c
v R i
v R i d
v R i dt
= +
(2.5)
其中a、b、c為abc 三相之磁通鏈,其矩陣方程式由式(2.6)表示。
sin sin( 2 )
3 sin( 2 )
3
e
a aa ab ac a
b ba bb bc b m e
c ca cb cc c
e
L L L i
L L L i
L L L i
= + −
+
(2.6)
其中Laa、Lbb、Lcc為三相定子側繞組自感項,其係數表示於式(2.7) [27]。
A cos(2 ) cos(2 2 )
3 cos(2 2 )
3
aa ls B e
bb ls A B e
cc ls A B e
L L L L
L L L L
L L L L
= + −
= + − +
= + − −
(2.7)
其中Lab、Lbc、Lac為三相定子側繞組互感項,其係數表示於式(2.8) [27]。
1 2
cos(2 )
2 3
1 cos(2 ) 2
1 2
cos(2 )
2 3
ab ba A B e
bc cb A B e
ca ac A B e
L L L L
L L L L
L L L L
= = − + −
= = − +
= = − + +
(2.8)
其中Lls為電動機定子側繞組漏磁電感,LA為電動機定子側直流電感係數,
LB為電動機定子側交流電感係數。
將式(2.6)磁通鏈方程式代入式(2.5)電壓方程式中,可得出式子表示於式 (2.9)。
abc s abc s abc abc
v R i L d i e
= + dt + (2.9)
其中eabc為永磁同步電動機之反電動勢,由三相定子側繞組線圈受永久磁鐵 激磁產生,與電動機同步旋轉轉速e成正比關係,其方程式可表示於式(2.10)。
cos cos( 2 )
3 cos( 2 )
3
e a
b e m e
c
e
e e e
= −
+
(2.10)
永磁同步電動機之電磁功率以式(2.11)表示,並將式(2.10)代入,得出式(2.11) 第二行結果,若假定電動機三相電流與電壓相位相同且三相平衡,可進一步簡化
電磁功率方程式,得出式(2.11)第三行結果。
2 2
[ cos cos( ) cos( )]
3 3
3 2
e a a b b c c
e m a e b e c e
e m m
P v i v i v i
i i i
I
= + +
= + − + +
=
(2.11)
其中Im為電動機相電流峰值,m為電動機相磁通量峰值。
由式(2.11)第三行結果可知,永磁同步電動機類似一個分激式直流電動機,其 電磁功率與轉速及相電流峰值乘積成正比關係,將可做線性控制使用。於 abc 三 相座標軸系統下分析,電壓及電流為非線性時變系統,且各變數互有耦合情況,
導致永磁同步電動機數學模型較為複雜,且控制器設計較為困難,若使用上一小 節座標軸轉換式(2.1)及式(2.3),將三相座標軸系統轉換至同步旋轉座標軸系統,
其變數解耦合,電動機系統也變為線性非時變,數學模型可簡化許多,分析較為 容易,永磁同步電動機d-q 軸電壓與電流方程式為式(2.12)。
0 0 0
0 0
0 0
0 0 0
d s d d e q
q s q q e d
s
v R i
v R i d
v R i dt
−
= + +
(2.12)
其中d、q、0分別為同步旋轉座標dq0 軸磁通鏈,假設忽略零相序,永久 磁鐵產生之磁通鏈pm與同步旋轉座標軸的d 軸平行,可知電動機 d-q 軸磁場分別 為d =L id d +pm及q =L iq q,則d-q 軸電壓方程式表示於式(2.13)與式(2.14),其等 效電路模型表示於圖2.8 中[9]。
d s d d d e q q
v R i L d i L i dt
= + − (2.13)
( )
q s q q q e d d pm
v R i L d i L i
dt
= + + + (2.14)
其中Rs為定子側電阻,Ld、Lq分別為 d-q 軸電感值,pm為永磁同步電動機
永久磁鐵產生之磁通鏈,而電磁功率方程式將可由式(2.15)表示。
3( )
e 2 q q d d
P = v i +v i (2.15)
(a) (b)
圖2.8 永磁同步電動機於d-q 軸等效電路模型
因定子線圈Rs很小忽略不計,且於定轉速穩態情況下,可省略電壓方程式之
時變項,簡化後電磁功率方程式Pe可表示於式(2.16),其電磁轉矩方程式所示為 式(2.17)。
3 [ ( ) ]
e 2 r pm q d q d q
P = i + L −L i i (2.16)
3 [ ( ) ]
2 2 2
p p
e e
e pm q d q d q
m r
N N
P P
T i L L i i
= = = + − (2.17)
其中N 為電動機磁極數,p m為電動機同步轉速,r為電動機轉子轉速。
於式(2.17)中,3
( ) 2 2
p pm q
N i 為永磁同步電動機永久磁鐵產生之勵磁轉矩,
3 ( )
2 2
p
d q d q
N L −L i i 為永磁同步電動機凸極效應產生之磁阻轉矩,因本論文採用內藏
式永磁同步電動機,其 d-q 軸電感不相等,即為Ld Lq,所以具有兩者轉矩特 性,除了說明電動機電氣特性外,還需說明機械特性,根據牛頓第二運動定律,
且考慮電動機伺服機械負載TL、電動機阻尼係數 B 以及轉動慣量 J ,其電動機機
械動態方程式可表示於式(2.18)[9]。
m
e m L
T J d B T
dt
= + + (2.18)
2.5 空間向量脈波寬度調變
脈波寬度調變(Pulse Width Modulation, PWM)原理是以高頻三角載波訊號決 定脈波之導通及截止時間,建立工作週期(duty cycle)驅動三相變頻器(Inverter)功 率電晶體,產生相差 120 度三相電壓訊號波形,而使永磁同步電動機產生轉子旋 轉 磁場 ,其驅 動 控制 策略 可分成弦 波式脈 波寬度調變(Sinusoidal Pulse Width Modulation, SPWM)及空間向量脈波寬度調變(Space Vector Pulse Width Modulation, SVPWM)。
弦波式脈波寬度調變原理是將控制器產生之三相弦波電壓命令與三角載波相 互比較,利用兩者大小差異,藉此產生脈波寬度調變訊號,再由三相變頻器將信 號放大後驅動永磁同步電動機,其控制方法較簡單,但電壓線性操作範圍較小,
為了有較高的電壓線性操作範圍,空間向量脈波寬度調變方法被提出,其電壓線 性操作範圍高於弦波式脈波寬度調變 1.155 倍,控制原理依據三相變頻器之電壓 空間向量切換,獲得圓形旋轉磁場,作為驅動功率電晶體之依據,因有較多電壓 空間向量切換,可消除電流諧波及降低電磁轉矩漣波,本論文採用空間向量脈波 寬度調變,以下將詳細說明其原理[24]。
三相六臂變頻器電路圖,如圖 2.9 所示,圖中變頻器共有三組上下臂功率電 晶體,其定義Ta+、Tb+、Tc+表示上臂開關、Ta−、Tb−、Tc−表示下臂開關,為了防 止直流電壓輸入端短路,造成功率電晶體及其他電路元件燒壞,同相間之上下兩 臂不能同時導通,故以互補型式進行驅動功率電晶體元件,三相變頻器開關狀態 可表示如式(2.19)。
1
x 0 s
= :
:
: , :
: , :
x x
x x
T ON T OFF T OFF T ON
+ −
+ − (2.19)
其中sx為開關狀態,x為a、b、c三相,Tx+為上臂開關,Tx−為下臂開關,
ON 為功率電晶體元件導通, OFF 為功率電晶體元件截止。
圖2.9 三相六臂變頻器電路圖
由圖 2.9 及式(2.19),已知功率電晶體元件開關狀態為 0 或 1,可得知三相相 電壓vas、vbs、vcs為0 或vdc,進而整理成各線對線電壓,表示為式(2.20)。
( ) ( ) ( )
ab as bs a b dc
bc bs cs b c dc
ca cs as c a dc
v v v s s v
v v v s s v
v v v s s v
= − = −
= − = −
= − = −
(2.20)
根據式(2.20),可得知負載端相電壓vas、vbs、vcs與開關狀態sa、sb、sc之 矩陣關係為式(2.21)。
2 1 1 1 2 1 3 1 1 2
as a
dc
bs b
cs c
v s
v v s
v s
− −
= − −
− −
(2.21)
經由式(2.21)三組開關之切換,可得出23 = 種不同開關切換狀態,分別產生8 八個電壓空間向量當作基底,其中有六個非零電壓向量及兩個零電壓向量,並由 二進制編碼表示,表 2-1 所示為各電壓空間向量之電壓值,可得知每次開關切換 時,都只變更一個開關狀態,將可減少開關切換損失,使流入永磁同步電動機之 電流諧波變小,便可提升三相變頻器效率,表中亦有利用第 2.3 小節座標軸轉換 技巧,由三相座標軸系統轉換至靜止座標軸系統之電壓空間向量vs、vs。
表2-1 各電壓空間向量之電壓表
sa sb sc v vas( dc) v vbs( dc) v vcs( dc) vs(vdc) vs(vdc) v vn( dc) v 1 1 0 0 2
3
1
−3 1
−3 2
3
0 2
3 0
v 2 1 1 0 1 3
1 3
2
−3 1
3
1 3
2 60 3
v 3 0 1 0 1
−3 2
3
1
−3 1
−3 1
3
2 120 3
v 4 0 1 1 2
−3 1
3
1 3
2
−3 0 2
3 180
v 5 0 0 1 1
−3 1
−3 2
3
1
−3 1
3
− 2 240 3
v 6 1 0 1 1 3
2
−3 1
3
1 3
1
− 3 2 300 3
v 7 1 1 1 0 0 0 0 0 0
v 0 0 0 0 0 0 0 0 0 0
將表 2-1 所得之非零電壓向量,可分為六個扇形區域,如圖 2.10 所示,每個 非零電壓向量之大小皆為2
3 vdc,相鄰兩電壓向量皆差 60 度,而兩個零電壓向量 則位於圓中心點,其圓半徑為圓心與六角形相切之距離,此距離即為空間向量脈 波寬度調變之線性區操作範圍,由式(2.22)表示。
0 *
3
dc m
v v
(2.22)
其中vm*為線性區操作範圍之電壓。
圖2.10 電壓向量與六個扇形區域
根據圖 2.10 六個扇形區域操作之電壓空間向量,可得知每個扇形區域會有四 個電壓向量分量,依序表示於表2-2 中,若給予一個參考電壓向量,根據位置 範 圍所在之扇形區域,可將扇形區中相鄰兩個非零電壓向量及零向量合成此參考電 壓向量,採用參考電壓向量的時間積分與操作電壓向量的時間積分相等,將計算 出三相逆變器之開關導通及截止時間,此關係式如式(2.23)所示。
1 0 7
1 0 7
0 0 0 0 0
n n
T T T T T
ref n n
v dt= v dt+ + v +dt+ v dt+ v dt
(2.23)
其中, T 為開關元件對稱切換半週期,Tn、Tn+1、T0分別為電壓空間向量
v 、n vn+1、v 及0 v 作用時間,n 為電壓向量之變數,其範圍為 1~6。 7
表2-2 六個扇形區域操作之電壓空間向量表
區域 角位置範圍 操作之電壓空間向量
I 0 60 v 1 v 2 v 0 v 7 II 60 120 v 2 v 3 v 0 v 7 III 120 180 v 3 v 4 v 0 v 7 IV 180 240 v 4 v 5 v 0 v 7 V 240 300 v 5 v 6 v 0 v 7 VI 300 360 v 6 v 1 v 0 v 7
當開關切換頻率高時,零向量之作用時間T0 T7可忽略不計,式(2.23)可簡化 得出式(2.24)。
1 1
ref n n n n
v T =v T +v T+ + (2.24) 接下來將說明各電壓操作時間推導過程,以扇形 I 區為例子說明,如圖 2.11 所示,當參考電壓向量位於扇形I 區時,vref 為v 及1 v 之電壓向量合成,由表 2-12
各電壓空間向量之電壓值可得 1
2 3 dc
v = v 、 2
1 1
3 dc 3 dc
v = v + v 代入於式(2.24),
可得出式(2.25)。
1 2 1 2
1 2
1 2 2
2 1 1
3 3 3
2 1 1
3 3 3
ref dc dc dc
dc dc dc
T T T T
v v v v v v
T T T T
T T T
v v v
T T T
v v
= + = + +
= + +
= +
(2.25)
其中v 、 v 為靜止座標軸上之電壓向量, 、 為靜止座標軸上向量,式 (2.25)中整理出 2 1 1 2
3 dc 3 dc
T T
v v v
T T
= + 及 1 2
3 dc
v v T
= T ,可得扇形 I 區導通時間T1、
T2值,分別表示於式(2.26)、式(2.27)。
1
3 1
3 2 s 2 s
dc
T T v v
v
= − (2.26)
2 3 s
dc
T T v
v
= (2.27)
圖2.11 扇形 I 區電壓向量圖
其餘五個扇形區域,可由表 2-1 中各電壓空間向量之靜止座標軸分量,並依 序代入式(2.23)中,進一步推導出各扇形區的Tn與Tn+1導通時間,所得之結果表示 於表2-3 中,且求得三相操作週期。
表2-3 各扇形區域電壓空間向量操作時間及週期表
區域 電壓空間向量之操作時間 操作週期 三相操作週期
I 區
1
2
3 1
3 2 2
3
s s
dc
s dc
T T v v
v
T T v
v
= −
=
1 1
2 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
c 2
b c
a b
d d d
d d d
d d d
= − −
= +
= +
II 區
2
3
3 1 3 2 2 3 1
3 2 2
s s
dc
s s
dc
T T v v
v
T T v v
v
= +
= − +
3 1
2 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
c 2
a c
b a
d d d
d d d
d d d
= − −
= +
= +
III 區
3
4
3
3 1
3 2 2
s dc
s s
dc
T T v
v
T T v v
v
=
= − −
3 1
4 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
a 2
c a
b c
d d d
d d d
d d d
= − −
= +
= +
IV 區
( )
4
5
3 1
3 2 2
3
s s
dc
s dc
T T v v
v
T T v
v
= − +
= −
5 1
4 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
a 2
b a
c b
d d d
d d d
d d d
= − −
= +
= +
V 區
( )
5
6
3 1
3 2 2
3
s s
dc
s dc
T T v v
v
T T v
v
= − +
= −
5 1
6 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
b 2
a b
c a
d d d
d d d
d d d
= − −
= +
= +
VI 區
( )
6
1
3
3 1
3 2 2
s dc
s s
dc
T T v
v
T T v v
v
= −
= − +
6 1
1 2
d T T d T
T
=
=
(
1 2)
2 1
1 1
b 2
c b
a c
d d d
d d d
d d d
= − −
= +
= +
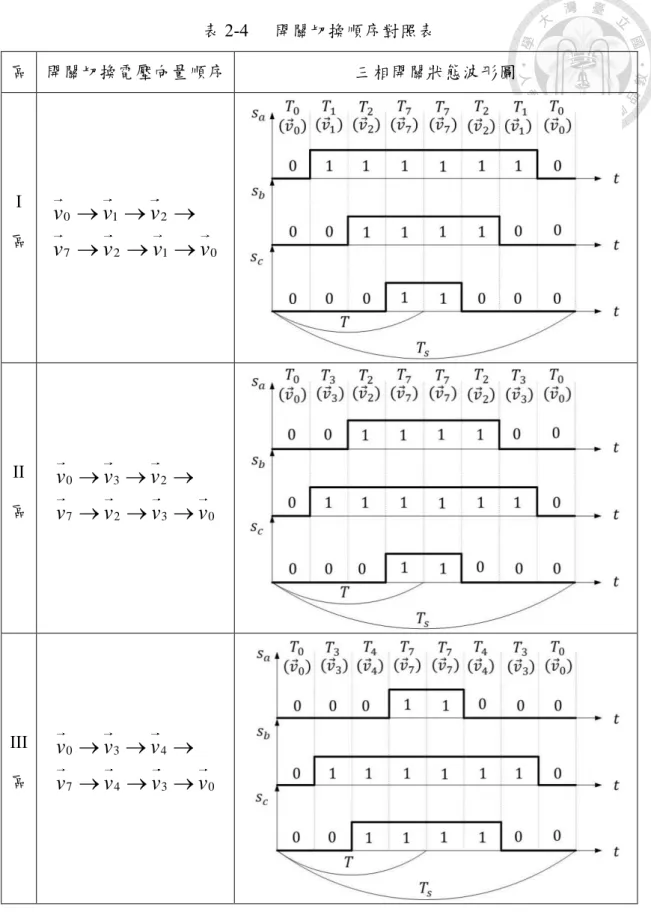
經由上述,得出六個扇形區之電壓向量作用時間,接著是如何實現空間向量 脈波寬度調變中開關切換,每次開關狀態變換時,僅改變一相功率電晶體開關狀 態,為了得到可用的波形及減少三相變頻器開關切換損失,電壓向量在六個扇形 區域需要有適當地安排,其開關切換順序及狀態波形圖,如表2-4 所示。
表2-4 開關切換順序對照表
區 開關切換電壓向量順序 三相開關狀態波形圖
I 區
0 1 2
7 2 1 0
v v v
v v v v
→ → →
→ → →
II 區
0 3 2
7 2 3 0
v v v
v v v v
→ → →
→ → →
III 區
0 3 4
7 4 3 0
v v v
v v v v
→ → →
→ → →
IV 區
0 5 4
7 4 5 0
v v v
v v v v
→ → →
→ → →
V 區
0 5 6
7 6 5 0
v v v
v v v v
→ → →
→ → →
VI 區
0 1 6
7 6 1 0
v v v
v v v v
→ → →
→ → →
第三章 驅動控制策略設計
3.1 前言
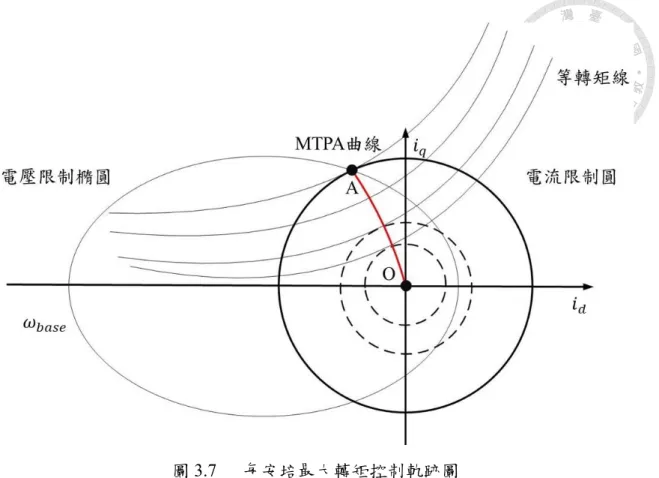
本章節將介紹不同驅動控制策略,並了解各控制策略之特性及差異,且運用 於電動機車之內藏式永磁同步電動機中,首先需了解電動機轉矩-轉速輸出特性,
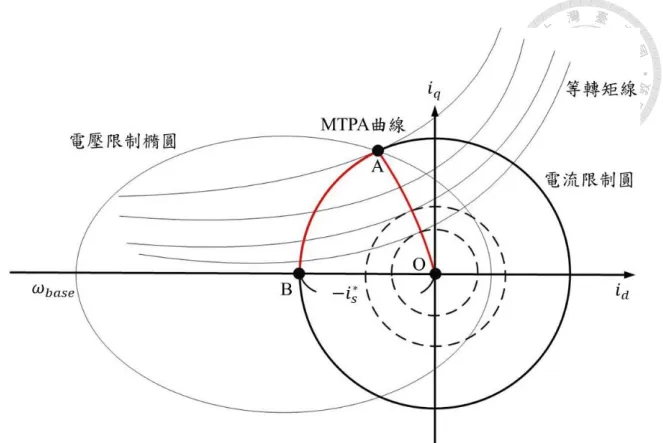
如圖 3.1 所示,永磁同步電動機操作範圍為黑色曲線所圍區域內,而紅色曲線為 功率操作線,區域可依據基準轉速base作為分界點,電動機操作轉速於基準轉速 以下為定轉矩區,應用上需要有較大的電磁轉矩輸出,故採用每安培最大轉矩控 制,便可得到較好的電動機電磁轉矩輸出及整體系統效率響應;於基準轉速以上 為定功率區,此區域需要寬廣速度操作範圍,使電動機車能高速運行,故採用弱 磁控制,得以延伸永磁同步電動機轉速操作範圍。而兩者區域轉換往往受到規格 限制,因此本章節先說明電動機電壓與電流限制原理,作為後續小節驅動控制策 略之依據,依序說明磁場導向控制、每安培最大轉矩控制、前饋式及反饋式弱磁 控制理論與架構。
圖3.1 永磁同步電動機之轉矩-轉速輸出特性圖
![圖 2.1(b)所示為內藏式電動機內部機械結構圖[25],其內部機械結構將永久磁 鐵埋入於轉子層內,故機械結構具有強健性,適合應用於大功率及高速運轉或經 常正反轉場合,此外,由於電動機內部結構不對稱,導致空氣隙不均勻分佈,具 有凸極效應,使得交軸電感值 L q 大於直軸電感值 L d ,因此有磁阻轉矩產生,若適 當地控制電動機便能獲得較高電磁轉矩輸出,於電動機驅動控制方面,可利用座 標軸轉換技巧,來進行數學模型分析及推導,為了得到較高電磁轉矩輸出量,本 論文採用內藏式永磁同步電動機作為模擬及實驗之對象。](https://thumb-ap.123doks.com/thumbv2/9libinfo/9604430.630617/21.892.223.673.449.1072/所示為內藏式電動機內部機械結構圖內部機械結構將永久磁鐵埋入於.webp)
![圖 2.7 永磁同步電動機三相系統座標軸之定子側等效電路圖 電動機三相定子繞組具有對稱性,因此三相電阻與電感以固定值假設,即為 s a b cR=R=R=R 與 L s = L a = L b = L c ,依據電學柯希荷夫電壓定律,可將永磁同步 電動機三相系統座標軸之電壓方程式表示於式(2.5) [27]。 0 0 0 0 0 0as a absbb c s c cvRivRidvRidt = + ](https://thumb-ap.123doks.com/thumbv2/9libinfo/9604430.630617/27.892.213.737.117.439/永磁同步電動三相系統座標軸之定子側等效電路圖電動機三相系統座.webp)