操作员手册
Calibration Pendulum
长沙工控帮教育科技有限公司
Trace back information:
Workspace R15-1 version a3 Checked in 2015-03-25 Skribenta version 4.1.349
长沙工控帮教育科技有限公司
操作员手册 Calibration Pendulum
文档编号: 3HAC16578-10 修订: P
© 版权所有 2003-2007,2010-2015 ABB。保留所有权利。
长沙工控帮教育科技有限公司
本手册中包含的信息如有变更,恕不另行通知,且不应视为 ABB 的承诺。 ABB 对本手 册中可能出现的错误概不负责。
除本手册中有明确陈述之外,本手册中的任何内容不应解释为 ABB 对个人损失、财产 损坏或具体适用性等做出的任何担保或保证。
ABB 对因使用本手册及其中所述产品而引起的意外或间接伤害概不负责。
未经 ABB 的书面许可,不得再生或复制本手册和其中的任何部件。
可从 ABB 处获取此手册的额外复印件。
本出版物的原始语言为英语。所有其他语言版本均翻译自英语版本。
© 版权所有 2003-2007,2010-2015 ABB。保留所有权利。
ABB AB Robotics Products Se-721 68 Västerås
瑞典
长沙工控帮教育科技有限公司
目表
7 手册概述 ...
10 产品文档,IRC5 ...
13 1 校准简介
13 1.1 本手册适用于哪些机器人? ...
14 1.2 校准安装在不同位置的机器人 ...
15 1.3 何时校准 ...
16 1.4 校准类型 ...
17 1.5 校准范围和正确轴位置 ...
39 1.6 校准设备 ...
42 1.7 存放和预热 ...
43 2 准备设备
43 2.1 简介 ...
44 2.2 启动 Levelmeter 2000 ...
47 2.3 校准传感器(校准摆锤)和 Levelmeter 2000 ...
54 2.4 检查传感器 ...
59 3 校准
59 3.1 校准服务例行程序中的功能 ...
60 3.2 Calibration Pendulum II ...
60 3.2.1 关于 Calibration Pendulum II ...
61 3.2.2 准备校准,CalPend ...
62 3.2.3 校准所有轴, CalPend ...
64 3.2.4 更新转数计数器 ...
67 3.2.5 校准传感器安装位置,CalPend ...
114 3.2.6 准备在轴 1 和 6 上使用传感器CalPend ...
115 3.2.7 关于 FlexPendant 的 Calibration Pendulum II 程序 ...
116 3.2.8 验证校准 ...
117 3.2.9 检查零位 ...
118 3.3 参考校准 ...
118 3.3.1 关于Reference Calibration ...
119 3.3.2 准备工具的参照面 ...
121 3.3.3 为轴 2-6 的校准定义参考值 ...
122 3.3.4 准备校准,RefCal ...
123 3.3.5 使用预定义参考值校准轴 2-6 ...
125 索引
长沙工控帮教育科技有限公司
此页刻意留白
长沙工控帮教育科技有限公司
手册概述
关于本手册
本手册包含使用工具校准摆锤校准机器人的程序。其中介绍了 Calibration Pendulum II 和 Reference Calibration 例行程序。
手册用法
使用校准摆锤校准期间应使用本手册。
本手册的阅读对象
本手册面向:
• 安装现场的安装人员。
• 进行维修和维护的维修人员。
操作前提
读者应
• 掌握机器人工作原理的必备知识
• 掌握校准的作用及如何执行校准的基本知识。
各章结构
本手册由以下各章组成:
目录 章节
有关校准方法的常规信息,包括必备工具的相关信息。
校准简介
有关在校准之前如何准备设备的信息。
准备设备
详细说明如何执行校准的程序。本章分为两节内容,每节内容对应一个例行 程序(Calibration Pendulum II 和Reference Calibration)。两节内容说明 了例行程序所适用的机器人系统。
校准
参考信息
文档编号 文档名称
3HNA011253-001 Product manual - IRB 52
3HAC035728-010 产品手册 - IRB 120
3HAC027400-001 Product manual - IRB 140
3HAC026048-001 Product manual - IRB 260
3HAC039842-010 产品手册 - IRB 460
3HAC025755-001 Product manual - IRB 660
3HAC039838-001 Product manual - IRB 760
3HAC046983-010 产品手册 - IRB 1200
3HAC026320-010 产品手册 - IRB 1410
3HAC043435-010 产品手册 - IRB 1520
3HAC026660-001 Product manual - IRB 1600 type A
3HAC022031-001 Product manual - IRB 2400
长沙工控帮教育科技有限公司
文档编号 文档名称
3HAC035504-001 Product manual - IRB 2600
3HAC022032-001 Product manual - IRB 4400
3HAC033453-001 Product manual - IRB 4600
3HAC027151-001 Product manual - IRB 6620
3HAC035737-001 Product manual - IRB 6620LX
3HAC026876-001 Product manual - IRB 6640
3HAC020993-001 Product manual - IRB 6650S
3HAC028197-001 Product manual - IRB 6660
3HAC044266-001 Product manual - IRB 6700
3HAC022033-001 Product manual - IRB 7600
3HAC021313-001 Product manual - IRC5
IRC5 及主计算机 DSQC 639.
3HAC047136-001 Product manual - IRC5
IRC5 及主计算机 DSQC1000.
修订版
描述 版本号
第一版。
-
新增了 IRB 7600-2.3/500 的相关信息。
A
修订了校准软件的路径。
进行了少量的编辑性更改。
进行了少量的编辑性更改。
B
新增了校准悬摆工具的方法。
有关 IRB 7600-2.3/500 信息的变更。
添加了 Calibration Pendulum II。
C
为 IRC5 新增了校准悬摆工具的方法。
有关 IRB 7600-2.3/500 信息的变更。
引入了Reference Calibration。
D
手动进行了重新调整.
校准程序中新增了机器人型号 IRB 1600、IRB 260、IRB 660、IRB 4450S 和 IRB 6600ID/6650ID。
校准程序中新增了机器人型号 IRB 1600 ID。
E
本修订版包含下列增补和/或修改内容:
• 淘汰了 S4Cplus/M2000。
• 淘汰了 IRB?4450S、IRB?6600/6650 和 IRB?940。
• 新增了 IRB?2600、IRB?4600、IRB?6620、IRB?6620LX、IRB?6640、
IRB?6660.
F
长沙工控帮教育科技有限公司
描述 版本号
本修订版包含下列增添和/或修改内容:
• 添加了 IRB 760 好 IRB 460。
• 将手册中全部“后退弯曲的机器人”命名更改为“串联机器人”。
• 添加章节第64页的轴 4 和轴 6 的正确校准位置。
• 在设备列表中添加 IRB 1600ID,有关转动盘适配器的信息,请参见第39 页的校准设备。
• 添加关于水平仪 2000 机柜内连接点的信息,请参见第44页的启动 Levelmeter 2000.
G
本修订版包含下列增添和/或修改内容:
• 添加了 IRB 1520ID。
• 更改了校准摆锤工具套件中的内容清单
• 增加了 IRB 2600ID 上臂图片。请参阅第17页的校准范围和正确轴位置。
H
本修订版包含下列增添和/或修改内容:
• 添加了 IRB 52。
• 对校准程序中的信息进行了调整,请参阅第115页的关于 FlexPendant 的 Calibration Pendulum II 程序。
• 添加了有关机器人的不同安装位置的信息,请参阅第14页的校准安装在不 同位置的机器人。
• 添加了新示意图,其中显示了 IRB 2600ID 所需的额外校准盘,请参阅第 39页的校准设备。
• 添加了传感器识别方面的补充性说明文字,请参阅第46页的测定传感器。
• 添加了传感器校准和检查方面的补充性说明文字,请参阅第50页的校准传 感器和第54页的检查传感器。
J
本修订版包含下列增添和/或修改内容:
• 增加了在 IRB 52 上的何处查找校准标签的信息,请参阅第116页的验证校 准。
K
本修订版包含下列增添和/或修改内容:
• 添加了 IRB 6700。
L
本修订版包含下列增添和/或修改内容:
• 增加了关于在主计算机 DSQC1000 上使用水平仪的信息,请参阅第45页 的在主计算机 DSQC1000 上使用水平仪。
M
本修订版包含下列增添和/或修改内容:
• 增加了用于 IRB 6700 校准摆锤安装的校准刻度和图片。
• 增加了底座处参照传感器的图片,适用于以下机器人:IRB 4600、IRB 6620、IRB 6640、IRB 6650S、IRB 6700、IRB 7600;请参阅第67页的 校准传感器安装位置,CalPend一节。
• 增加了关于垂直安装中轻轻压下摆锤重要性的信息。
• 增加了关于参照表面的信息,请参阅第120页的参照表面。
N
本修订版包含下列增添和/或修改内容:
• 增加了 USB 至 RS232 适配器电缆的货号,请参阅第39页的校准设备。
P
长沙工控帮教育科技有限公司
产品文档,IRC5
ABB 机器人用户我能当的类别
ABB 机器人用户文档分为多个类别。以下列表基于文档的信息类型编制,而未考虑产 品为标准型还是选购型。
所有列出的文档都可以向 ABB 订购 DVD。列出的文档适用于 IRC5 机器人系统。
产品手册
机械手、控制器、DressPack/SpotPack 和其他大多数硬件交付时一般都附有包含以 下内容的产品手册:
• 安全信息。
• 安装与调试(介绍机械安装或电气连接)。
• 维护(介绍所有必要的预防性维护程序,包括间隔周期和部件的预计使用寿 命)。
• 维修(介绍所有建议的维修程序,包括零部件)。
• 校准.
• 停用。
• 参考信息(安全标准、单位换算、螺钉接头和工具列表)。
• 带分解图的备件列表(或者单个备件列表的参考信息)。
• 电路图(或电路图参考信息)。
技术参考手册
技术参考手册介绍了机器人产品的参考信息。
• Technical reference manual - Lubrication in gearboxes:关于操纵器齿轮箱 的润滑油类型和用量的说明。
• Technical reference manual - RAPID overview:RAPID 编程语言概述。
• Technical reference manual - RAPID Instructions, Functions and Data types:
所有 RAPID 指令、函数和数据类型的说明和语法。
• Technical reference manual - RAPID kernel:RAPID 编程语言的正式描述。
• Technical reference manual - System parameters:系统参数和配置工作流程 说明。
应用手册
特定的应用产品(例如软件或硬件选项)在应用手册中介绍。一本应用手册可能涵盖 一个或多个应用产品。
应用手册通常包含以下信息:
• 应用产品用途(作用及使用场合).
• 随附的内容(如电缆、I/O 电路板、RAPID 指令、系统参数和计算机软件光 盘)。
• 如何安装所包含的或所需的硬件。
• 如何使用应用产品.
• 应用产品使用示例.
长沙工控帮教育科技有限公司
操作员手册
操作员手册说明了产品的实际处理过程。手册面向与产品有着直接接触操作的人员,
即生产车间操作员、程序员和故障排除人员.
此套手册包括(特别是):
• 操作员手册 - 紧急安全信息
• 操作员手册 - 一般安全信息
• 操作员手册 - 使用入门、IRC5 和 RobotStudio
• Operating manual - Introduction to RAPID
• 操作员手册 - 带 FlexPendant 的 IRC5
• 操作员手册 - RobotStudio
• 操作员手册 - IRC5 故障排除,用于控制器和操纵器。
长沙工控帮教育科技有限公司
此页刻意留白
长沙工控帮教育科技有限公司
1 校准简介
1.1 本手册适用于哪些机器人?
适用的机器人型号
通常,可使用多种方法校准机器人。本手册介绍了使用 Calibration Pendulum 方法的 机器人校准,这适用于下列 ABB 机器人:
• IRB 52
• IRB 140
• IRB 260
• IRB 460
• IRB 660
• IRB 760
• IRB 1410
• IRB 1600
• IRB 1520ID
• IRB 2400
• IRB 2600
• IRB 4400
• IRB 4600
• IRB 6620
• IRB 6620LX
• IRB 6640
• IRB 6650S
• IRB 6660
• IRB 6700
• IRB 7600
长沙工控帮教育科技有限公司
1.2 校准安装在不同位置的机器人
安装位置
一些机器人可以安装在倾斜位置、悬挂位置或墙壁位置。有关可行的安装位置,请参 阅特定机器人的产品手册或产品规格。
在用 Calibration Pendulum 例行程序校准机器人时,必须考虑机器人的安装位置。
针对不同安装位置的校准信息
针对校准流程的附加信息 Calibration Pendulum II
机器人安装位置
机器人倾斜度不能超过 ±5°。
适用 地面安装
如果机器人倾斜度超过 ±5°,则必须将 它放下来并固定在水平地面上。
适用的,但最大倾斜度为
±5°。
倾斜
将机器人放下来并将它固定在地面上。
不适用,必须将机器人放下来 并固定在地面上。
墙壁安装
机器人倾斜度不能超过 ±5°。
适用 悬挂
必须设置参数 Gravity Beta,以便 Calibration Pendulum II 可以检测出机 器人处于悬挂状态。
在校准轴 1 时:抵着定位销向下按摆锤,
然后将其固定在位(比如用橡皮筋)。
长沙工控帮教育科技有限公司
1.3 何时校准
何时校准
如果出现下面列出的一个或多个故障,必须校准系统。
更改了分解器值
如果任何分解器值已更改,请根据第59页的校准中的说明认真校准测量系统。当机器 人上更换了影响校准位置的部件时,可能会出现这种情况。
转数计数器存储器的内容丢失
如果转数计数器存储器的内容丢失,根据第64页的更新转数计数器中的详细说明大致 地校准系统。在以下情形下可能会出现这种情况:
• 电池已放电
• 出现分解器错误
• 分解器和测量电路板间信号中断
• 控制系统断开时移动了机器人轴。
长沙工控帮教育科技有限公司
1.4 校准类型
Calibration Pendulum II(机器人原位校准)
使用 Calibration Pendulum II (CalPend) 例行程序将机器人移至零位置,以微校电机 校准偏移值。校准是全自动进行的,会将机器人移至从传感器读取的位置。
请参阅第60页的关于 Calibration Pendulum II。
Reference Calibration
有了例行程序Reference Calibration (RefCal),一旦安装机器人,参考将采用机器人 的零位置。如果将来需要重新校准机器人,即需要重新校准电机校准偏移值时,将使 用这些参考值。请参阅第118页的关于Reference Calibration。
Reference Calibration具有下列特点:
• 轴 1 的位置:可将轴 1 放在任何位置,以避开障碍。(不适用于 Calibration Pendulum II。)
• 工具和处理设备:所有在校准期间可以保持装配状态的工具和处理设备。(不 适用于 Calibration Pendulum II。)
• 悬挂机器人:也可对悬挂机器人使用参考。
长沙工控帮教育科技有限公司
1.5 校准范围和正确轴位置
简介
本节指定校准范围位置和/或正确轴位置。
校准范围/标记,IRB 52
本图显示了机器人上校准范围和标记的位置。
2+
1+
3+ 4+
5+ 6+
A
B C
D
E F
xx1100000632
校准标记,轴 1 A
校准标记,轴 2 B
校准标记,轴 3 C
校准标记,轴 4 D
校准标记,轴 5 E
校准标记,轴 6 F
长沙工控帮教育科技有限公司
校准范围,IRB 140
下图显示了 IRB 140 的校准范围位置。
xx0200000157
长沙工控帮教育科技有限公司
校准范围,IRB 260
将轴 3 放在校准位置上时,在机械停止上可以看到校准盘上的标记,如下图所示。
xx0500002485
轴 3 的机械停止 A
校准盘上的校准标记,轴 3 B
校准盘和标记,轴 6 C
冲压,轴 1,3HAB8223-1 D
冲压,轴 2,3HAB8223-1(1 标记)
E
长沙工控帮教育科技有限公司
校准范围/标记,IRB 460
本图显示了机器人上校准范围和标记的位置。
xx1000001433
校准盘,轴 1 A
校准标记,轴 2 B
校准标记,轴 3 C
校准盘和标记,轴 6 D
长沙工控帮教育科技有限公司
校准范围/标记,IRB 660
本图显示了机器人上校准标记的位置。
xx0500002487
校准盘,轴 1 A
机器人上的校准拉环 B
校准标记,轴 2 C
校准标记,轴 3 D
校准盘和标记,轴 6 E
轴 2 和 3 上的校准标记
如上图所示,轴 2、3 和 6 的校准标记包含两个单独的标记。当机器人位于其校准位 置时,这两个标记的位置应互相对立。其中一个标记比另一个标记更窄,且应位于较 宽标记的限值以内。
长沙工控帮教育科技有限公司
校准范围/标记,IRB 760
本图显示了 IRB 760 的校准范围位置。
xx1000001146
校准盘,轴 1 A
机器人上的校准拉环 B
校准标记,轴 2 C
校准标记,轴 3 D
校准盘和标记,轴 6 E
轴 2、3 和 6 的校准标记
如上图所示,轴 2、3 和 6 的校准标记包含两个单独的标记。当机器人位于其校准位 置时,这两个标记的位置应互相对立。其中一个标记比另一个标记更窄,且应位于较 宽标记的限值以内。
长沙工控帮教育科技有限公司
校准范围,IRB 1410
下图显示了 IRB 1410 的校准范围位置。
en0200000272
长沙工控帮教育科技有限公司
校准标记,IRB 1600
下图显示了机器人的六根轴的校准标记和正确位置。根据轴的编号对图中所示的标记 进行了编号。
xx0600002876
长沙工控帮教育科技有限公司
校准范围,IRB 1600ID
下图显示了机器人的六根轴的校准标记和正确位置。根据轴的编号对图中所示的标记 进行了编号。
6 4 5
3 2
1
xx0700000095
长沙工控帮教育科技有限公司
校准范围,IRB 1520ID
下图显示了机器人所有轴上校准标记的位置。
xx1100000363
Figure 1.1: 校准标记(从左下部到右上部):轴 1、轴 4、轴 5 和轴 6。
长沙工控帮教育科技有限公司
xx1100000364
Figure 1.2: 校准标记(从顶部到底部):轴 3 和轴 2。
长沙工控帮教育科技有限公司
校准范围,IRB 2400
下图显示了机器人所有轴上的校准标记。
en0200000273
长沙工控帮教育科技有限公司
校准范围,IRB 4400
此图显示了 IRB 4400 的校准范围位置。用于轴 2、3、4 和 5 的校准标记使用冲压标 记工具进行标记。
xx0300000209
冲压,轴 2,3HAB 1521-1 A
冲压,轴 3,3HAB 1522-1 B
冲压,轴 4,3HAB 1523-1(有两种标记形式,如图中所示)
C
冲压,轴 5,3HAB 1524-1 D
长沙工控帮教育科技有限公司
校准标记,IRB 4600、IRB 2600 和 2600ID
图中显示了所有机器人变型的校准范围位置。
IRB 4600 - 60/2.05、-45/2.05、40/2.55、-20/2.50 和 IRB 2600 - 20/1.65、-12/1.65、
-12/1.85
xx0800000312
校准标记,轴 1 A
校准标记,轴 2 B
校准标记,轴 3 C
长沙工控帮教育科技有限公司
IRB 4600 - 60/2.05、-45/2.05、40/2.55
xx0800000313
校准标记,轴 4 D
校准标记,轴 5 E
校准标记,轴 6 F
长沙工控帮教育科技有限公司
IRB 4600 -20/2.50 和 IRB 2600 -20/1.65、-12/1.65、-12/1.85
xx0800000320
校准标记,轴 4 D
校准标记,轴 5 E
IRB 2600ID -15/1.85、-8/2.00
A B
C
xx1000000445
校准标记,轴 4 A
校准标记,轴 5 B
校准标记,轴 6 C
长沙工控帮教育科技有限公司
IRB 4600 -20/2.50 和 IRB 2600 -20/1.65、-12/1.65、-12/1.85
xx0800000321
校准标记,轴 6 F
校准范围/标记、IRB 6650S、IRB 7600
下图显示了特定板上校准范围的位置,以及恰好位于轴 2 和 3 上铸件中的校准标记。
此图显示的是 IRB 6600,但校准范围及其位置都是相同的。
xx0200000176
校准范围,轴 1(早期设计)
A1
校准范围,轴 1(近期设计)
A2
校准范围,轴 2(早期设计)
B1
校准标记,轴 2(近期设计)
B2
校准范围,轴 3(早期设计)
C1
校准标记,轴 3(近期设计)
C2
校准范围,轴 4 D
校准范围,轴 5 E
长沙工控帮教育科技有限公司
校准范围,轴 6 F
轴 2 和 3 上的校准标记
如上图所示,轴 2、3 和 6 的校准标记包含两个单独的标记。当机器人位于其校准位 置时,这两个标记的位置应互相对立。其中一个标记比另一个标记更窄,且应位于较 宽标记的限值以内。
校准范围,IRB 6620
下图显示了机器人所有轴上校准标记的位置.
xx0600003096
校准范围,轴 1 A
校准范围,轴 2 B
校准范围,轴 3 C
长沙工控帮教育科技有限公司
校准范围,轴 4 D
校准范围,轴 5 E
校准范围,轴 6 F
校准范围,IRB 6620LX
下图显示了机器人所有轴上校准标记的位置.
xx0900000223
校准标记,轴 1(可选位置)
A
校准范围,轴 2 B
校准范围,轴 3 C
校准范围,轴 4 D
校准范围,轴 5 E
校准范围,轴 6 F
可选位置,校准标记轴 1
轴 1 的校准标记的位置是可选的,可在安装时置于适当的位置。
长沙工控帮教育科技有限公司
校准范围/标记,IRB 6640 和 IRB 6640ID
下图显示了机器人上校准标记的位置.
xx0700000340
校准标记轴 1 A
校准标记轴 2 B
校准标记轴 3 C
校准标记轴 4 D
校准标记轴 5 E
校准标记轴 6 F
校准标记轴 5,IRB 6640ID G
校准标记轴 6,IRB 6640ID H
长沙工控帮教育科技有限公司
校准范围/标记,IRB 6660
下图显示了机器人上校准标记的位置.图中显示的是 IRB 6660 - 130/3.1 型机器人,但 校准标记的位置与所有 IRB 6660 型机器人均相同。
xx0700000148
校准盘,轴 1 A
机器人上的校准拉环 B
校准标记,轴 2 C
校准标记,轴 3 D
校准标记,轴 4 E
校准标记,轴 5 F
校准标记,轴 6 G
长沙工控帮教育科技有限公司
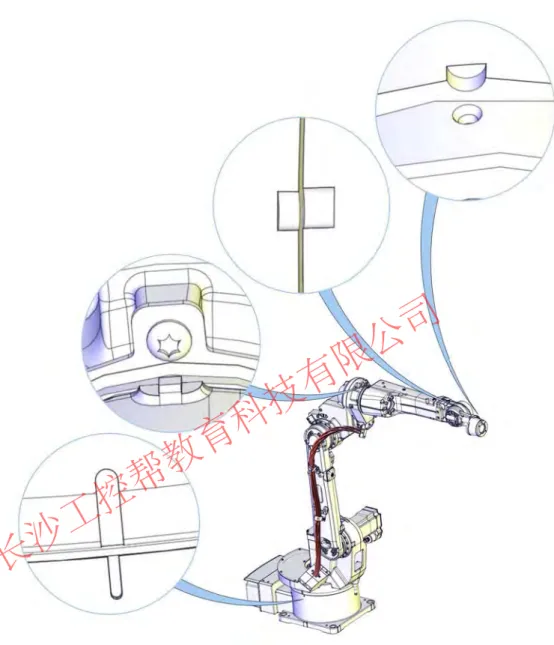
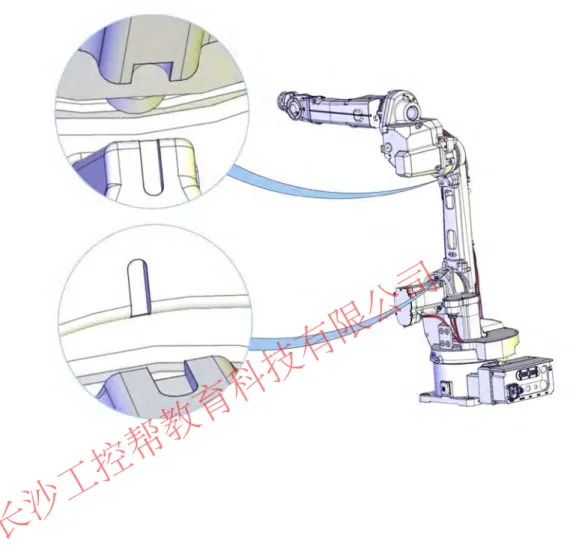
校准刻度/标记,IRB 6700
轴 2
xx1300000869
轴 1
xx1300000868
轴 4
xx1300000871
轴 3
xx1300000870
轴 6
xx1300000873
轴 5
xx1300000872
长沙工控帮教育科技有限公司
1.6 校准设备
所需设备 - Pendulum Calibration
使用 Pendulum Calibration 方法要求特定的校准设备。下列为所需的设备,包括所有 机器人型号通用的部分以及不同机器人型号特有的更具体的适配器。
全部机器人 - 校准摆锤组合
注释 货号
设备
内容见表格第40页的校准摆锤组合的内 容 3HAC15716-1
3HAC15716-1 校准摆锤全套工具
此全套工具只能从 ABB 租用,请与服务 部门联系。
用于清洁传感器连接点。
11771012-208 异丙醇
IRB 2600ID - 附加设备
注释 货号
设备
包括所有导销和连接螺丝。
xx1200000017
3HAC038166-001 转动盘适配器
IRB 760 - 附加设备
注释 货号
设备
xx1000001150
3HAC038549-001 转动盘适配器
长沙工控帮教育科技有限公司
IRB 6620, IRB 6620LX, IRB 6640, IRB 6650S, IRB 6700, IRB 7600 - 附加设备
注意
对于机器人 IRB 6620、IRB 6640、IRB 6650S、IRB 6700 和 IRB 7600,如果底座 上有参照传感器校准支架,则需要转动盘适配器,请参阅第94页的参照位置 IRB6620, IRB6640(底座上有校准支架)、第95页的参照位置 IRB6650S, IRB7600(底座上 有校准支架)和第101页的参照位置 IRB 6700(底座上有校准支架)。
对于机器人 IRB 6620LX,R14.1 以及更新版本都需要转动盘适配器。
对每个机器人上的Pendulum Calibration务必使用相同的方法。也就是说,如果上 一次机器人是用底座上的支架和转动盘适配器进行校准的,则要继续使用支架和适 配器,否则校准值可能会出错。
注释 货号
设备
要安装到校准盘 3HAC020552-002,包含 在校准摆锤组合中。
3HAC048764-001 参照传感器校准支架
用于传感器的校准,如果用作参照传感器 且传感器装在底座上的校准支架上,则安 装在垂直面上。
包括所有导销和连接螺丝。
xx1400001433
3HAC048787-001 转动盘适配器
IRB 1520ID - 附加设备
注释 货号
设备
用于轴 1 的校准。
3HAC041422-001 校准工具集
包括校准工具块、平行销和保护螺钉。
校准摆锤组合的内容 3HAC15716-1
注释 货号
目录 参量
3HAC12837-7 测斜仪,Wyler
Zerotronic 2
全部所需的电缆 Wyler 电缆
1
在配备主计算机 DSQC1000 的 IRC5 控 制器上使用。
3HAC050406-001 USB 转 RS232 适配线
1
3HAC15732-1 Leveltronic NT/41
1
长沙工控帮教育科技有限公司
注释 货号
目录 参量
用作校准传感器和参照传感器,具体取决 于当时所起的作用。
3HAC4540-1 校准摆锤
1
可以双向转动以适应 IRB 52、IRB140、
IRB 1410、IRB 1600、IRB 1600ID、IRB 1520ID、IRB 2400、IRB 2600、IRB 4400、IRB 4450S 和 IRB 4600。
3HAC16423-1 转动盘适配器
1
包括所有导销和连接螺丝。
xx0200000276
A 导销 8 mm B 导销 6 mm C 螺丝 M10 D 螺丝 M6 3HAC021287-001
同步盘 1
校准摆锤时的必备物件 3HAC020552-002
校准盘 1
用作 Leveltronic NT/41 的电池 电池
4
用于维修所有受损的保护盖连接孔。
螺纹丝锥,M8 1
用于更换任何受损的保护盖。
保护盖和连接螺丝 5
长 58 mm 3HAC14137-1
定位销 1
用于 IRB 660、IRB 6650S 和IRB 7600 轴 1 的校准。
长 68 mm 3HAC14137-2
定位销 1
用于 IRB 52, IRB 140、IRB 260、IRB 460、IRB 760、IRB 1410、IRB 1600、
IRB 2400、IRB 2600、IRB 4400、IRB 4450S、IRB 6620、IRB 6640、IRB 6660 和 IRB 6700 的轴 1 校准。
用于 IRB 260、IRB 460、IRB 660 和 IRB 760 轴 6 的校准。
3HAC024702-001 校准杆
1
操作员手册 - Calibration Pendulum 3HAC16578-10
用户文档 1
所需设备 - Reference Calibration
注释 货号
设备
通过Reference Calibration校准机器人系 统时,用作工具上的参照面。
3HAC025397-001 参照适配器
长沙工控帮教育科技有限公司
1.7 存放和预热
注意
始终将摆锤传感器存放在水平放置的便携包中,或存放在安装在水平放置校准盘上 的便携包中。
存放在非水平位置可能会导致 Wyler 传感器出现长时间漂移和错误。
存放和预热
存放后,必须将摆锤工具安装在水平位置,且在使用前必须至少预热(通电)5 分钟。
存放位置或预热位置如下图所示。
xx0300000152
校准摆锤 3HAC4540-1 A
校准板 3HAC020552-002 B
长沙工控帮教育科技有限公司
2 准备设备
2.1 简介
简介
本章介绍了在校准机器人之前校准设备的必需准备工作。
长沙工控帮教育科技有限公司
2.2 启动 Levelmeter 2000
Levelmeter 2000 的布局和连接
下图显示了 Levelmeter 2000 的布局和连接.
A B C
E D
xx0200000126
连接传感器 A A
连接传感器 B B
连接 SIO 1 C
选择指针 D
计量单位 E
准备工作 - Levelmeter 2000 的设置
以下程序详细描述了 Levelmeter 的初始准备工作。
操作
在使用之前对 Levelmeter 2000 至少预热 5 分钟。
1
将角度的计量单位 (DEG) 设置为精确到小数点后三位,如 0.330?。
2
长沙工控帮教育科技有限公司
启动 Levelmeter
此处简要介绍了如何初始化 Levelmeter 2000。详细程序在制造商提供的手册中进行 了说明。
注释 操作
使用所附的电缆连接测量单元和传感器。
1
电源在第45页的Levelmeter 2000 的电源中 进行了详细描述。
开启 Levelmeter 2000 的电源。
2
在第46页的测定传感器中进行了详细描述。
连接传感器 A 和 B。
3
在使用主计算机 DSQC1000 的 IRC5 控制器 上,水平仪通过适配器连接到 USB 口上,
请参阅第45页的在主计算机 DSQC1000 上 使用水平仪。
通过标记的连接器将水平仪 2000 与控制柜 内的 COM1 端口相连OUT (connection SIO1)。
4
校准机器人!
5
在主计算机 DSQC1000 上使用水平仪
在具有主计算机 DSQC1000 的 IRC5 控制器上,水平仪通过 USB/RS232 适配器连接 到 USB 端口上。
正确的 USB/RS232 适配器已随水平仪提供,请参阅第39页的校准设备。
注释 操作
注意
如果 USB/RS232 适配器在控制器电源打开 时插入,将无法继续校准。
适配器仅在系统启动时才会启动。
切断控制器电源。
1
将 USB/RS232 适配器插入控制器的 USB 口。
2
打开控制器电源。
3
校准机器人!
4
注意
如果在控制器电源开启时拔下 USB/RS232 适配器,则系统将会死机。
如果发生此类情形,请关闭电源并等待 2-3 分钟,等待备用能源组耗完电量且主计算机 上的所有 LED 熄灭。如果过早开启控制器,
系统将仍然处于死机状态。
切断控制器电源。
5
将 USB/RS232 适配器从控制器的 USB 口拔 出。
6
打开控制器电源。
7
Levelmeter 2000 的电源
有两种方式可供选择:
• 电池模式:按住 ON/MODE,直到显示屏开始闪烁,从而开启 Levelmeter。这 会关闭电池节电模式。使用后不要忘记关闭。
长沙工控帮教育科技有限公司
• 外部电源:将电源线(红/黑)连接到 12-48 VDC,位于机柜(连接器 XT31)
或外部电源。有关机柜内连接器位置的信息,请参见Product manual - IRC5。
传感器地址
注释 操作
在校准工具集内由传感器制造商提供的文档 中进行了详细说明。
确保传感器有不同的地址。只要地址彼此之 间互不相同,任何地址都可行。
1
测定传感器
注释 操作
标有 A 和 B。请参阅第44页的Levelmeter 2000 的布局和连接图。
将传感器连接到传感器连接点。
1
以启动 Levelmeter。
按 ON/MODE。
2
反复按 ON/MODE 按钮,直到文本 SENSOR 被选中。
3
按 ENTER。
4
按 ZERO/SELECT 箭头,直到 A B 开始闪 烁。
5
按 ENTER.,等到 A 开始闪烁。
6
按 ENTER,等到 B 开始闪烁。
7
按 ENTER。
8
结果
现在,Levelmeter 2000 已初始化完毕,可开始使用。
长沙工控帮教育科技有限公司
2.3 校准传感器(校准摆锤)和 Levelmeter 2000
校准传感器的目的
在校准和参考传感器都会用到校准摆锤。校准传感器可确保摆锤旋转 180 度时使用相 同值,只是极性 (+/-) 相反。
当校准传感器时
如果在一段时间内未曾使用过传感器,或者摆锤经过了运输,请使用 Levelmeter 校 准传感器,以取得适当的校准结果。可对传感器的校准进行检查,请参阅第54页的检 查传感器。如果差太大,应进行重新校准。
传感器校准的结果将保存在 Levelmeter 中。因此,如果将传感器连接到新的 Levelmeter,则需要重新校准。
如何校准传感器
传感器校准步骤:首先将其安装在特别的校准盘上,包括校准摆锤组,然后在 Levelmeter 上运行校准步骤。请参阅第50页的校准传感器。
如果摆锤作为参照传感器安装在与校准支架垂直的平面上,则传感器必须也安装在与 校准盘垂直的平面上。请验证机器人的底座上是否有校准框架。如果有框架,则必须 通过将传感器安装在与校准盘垂直的平面来校准。
有校准支架的机器人
以下机器人有校准支架:
图示 机器人
xx1400001051
IRB 4600
长沙工控帮教育科技有限公司
图示 机器人
xx1400001052
IRB 6620 IRB 6640
xx1400001053
IRB 6700
xx1400001638
IRB 6650S IRB 7600
长沙工控帮教育科技有限公司
插图 - 将传感器安装到水平面的校准盘上
如图所示,校准摆锤安装在相对校准盘水平的平面上。这种情况在摆锤作为参照传感 器安装在水平平面上时使用。
xx0300000152
传感器(校准摆锤,3HAC4540-1)
A
校准盘(3HAC020552-002)
B
插图 - 将传感器安装到垂直面的校准盘上
如图所示,校准摆锤安装在相对校准盘垂直的平面上。这种情况在摆锤作为参照传感 器安装在垂直平面上时使用。
xx1400001624
传感器(校准摆锤,3HAC4540-1)
A
校准支架(3HAC048764-003) B
校准盘(3HAC020552-002)
C
长沙工控帮教育科技有限公司
校准传感器
按照以下程序校准传感器。
根据传感器安装在水平面或垂直面上,选择一种准备步骤。
准备校准盘并将传感器安装在水平面上
注释/图示 操作
将校准盘在平稳的底座(例如台钳)上放好。
注意
重要的是,在传感器校准期间校准盘不能移动。
1
用异丙醇清洁校准盘表面和传感器支架上的三个接 触面点。
2
xx0300000152
A 传感器(校准摆 锤,3HAC4540-1)
B 校准盘(3HAC020552-002)
将传感器安装到两个可能位置之一,然后拧紧螺钉。
3
准备校准盘并将传感器安装在垂直面上
注释/图示 操作
用异丙醇清洁校准盘。
1
xx1400001640
用螺钉将支架安装到校准盘上。
注意
完全上紧螺钉,在校准期间,支架不能移动!
2
长沙工控帮教育科技有限公司
注释/图示 操作
将校准盘在平稳的底座(例如台钳)上放好。
注意
重要的是,在传感器校准期间校准盘不能移动。
3
用异丙醇清洁支架表面和传感器支架上的三个接触 点表面。
4
xx1400001641
在上紧传感器的紧固螺钉时轻轻向下按传感器,降 气固定在两个可能位置中的一个上。
在上紧螺钉时,不要用力把摆锤外壳推到边上。
5
校准传感器
注释/图示 操作
注意
步骤 1-5 用于选择要校准的传感器(A 或 B)。从 传感器 A 开始。按照步骤 6-11 中所述方式对传感器 A 进行校准。完成后,对传感器 B(用 * 号标明)
重复步骤 1-11。
重复按 ON/MODE 按钮,直到 SENSOR 文本被选 中。
1
按 ENTER。
2
这将选择传感器 A 进行校准。若要校 准传感器 B,请选择传感器 B。
反复按 ZERO/SELECT,直到在 Port/Sensor 下方 显示出闪烁的 A* 字样。
3
按 ENTER。等到 A* 字样停止闪烁然后又开始闪烁 为止。
4
按 ENTER。
5
反复按 ON/MODE,直到文本 ZERO 被选中。
6
长沙工控帮教育科技有限公司
注释/图示 操作
注意
注意,从现在开始,请不要更改校准 盘的位置。
按 ENTER。随即将显示方向指示灯 (+/-) 和最后的 零偏差。等待数秒,以便传感器趋于稳定。
7
按 HOLD。等到 ZERO 下方的指示灯开始闪烁。
8
安装在水平面上的传感器:
xx0300000261
小心的取下传感器,将其旋转 180°,然后将其安装 到校准盘上的相应孔型中。请慢慢小心转动,以防 改变传感器的值。
等待数秒,直到传感器稳定。
注意
注意不要更改校准盘的位置。
xx0300000207
9
安装在垂直面上的传感器:
xx1400001642
按 HOLD。等待数秒,以便显示出新的零偏差。
10
现在便已完成对传感器 A* 的校准。
按 ENTER。
11
重复步骤 1-5,只不过需选择传感器 B(而不是 A),然后重复步骤 6-11,以校准传感器 B。
12
注意
此时应该看到 (A B),而不是 (A-B)。
当两个传感器都经过校准后:按步骤 1-5 中所述方 式对仪器进行调整,以便在 Port/Sensor 下方显示 出 A B(不闪烁)。
13
长沙工控帮教育科技有限公司
注释/图示 操作
请参阅第54页的检查传感器。
验证结果。
14
长沙工控帮教育科技有限公司
2.4 检查传感器
简介
本节介绍在手动校准传感器后,如何对其进行检查,请参阅第47页的校准传感器(校 准摆锤)和 Levelmeter 2000。如果未对传感器手动校准,则无需进行检查。
传感器安装到校准盘
如果摆锤作为参照传感器安装在与校准支架垂直的平面上,则传感器必须也安装在与 校准盘垂直的平面上。请验证机器人的底座上是否有校准框架。如果有框架,则必须 通过将传感器安装在与校准盘垂直的平面来校准。
插图 - 将传感器安装到水平面的校准盘上
如图所示,校准摆锤安装在相对校准盘水平的平面上。这种情况在摆锤作为参照传感 器安装在水平平面上时使用。
xx0300000152
传感器(校准摆锤,3HAC4540-1)
A
校准盘(3HAC020552-002)
B
长沙工控帮教育科技有限公司
插图 - 将传感器安装到垂直面的校准盘上
如图所示,校准摆锤安装在相对校准盘垂直的平面上。这种情况在摆锤作为参照传感 器安装在垂直平面上时使用。
xx1400001624
传感器(校准摆锤,3HAC4540-1)
A
校准支架(3HAC048764-003) B
校准盘(3HAC020552-002)
C
检查传感器
按照以下程序,使用 Levelmeter 2000 检查各个传感器。
根据传感器安装在水平面或垂直面上,选择一种准备步骤。
准备校准盘并将传感器安装在水平面上
注释/图示 操作
将校准盘在平稳的底座(例如台钳)上放好。
注意
重要的是,在传感器校准期间校准盘不能移动。
1
用异丙醇清洁校准盘表面和传感器支架上的三个接 触面点。
2
长沙工控帮教育科技有限公司
注释/图示 操作
xx0300000152
A 传感器(校准摆 锤,3HAC4540-1)
B 校准盘(3HAC020552-002)
将传感器安装到两个可能位置之一,然后拧紧螺钉。
3
准备校准盘并将传感器安装在垂直面上
注释/图示 操作
用异丙醇清洁校准盘。
1
xx1400001640
用螺钉将支架安装到校准盘上。
注意
完全上紧螺钉,在校准期间,支架不能移动!
2
将校准盘在平稳的底座(例如台钳)上放好。
注意
重要的是,在传感器校准期间校准盘不能移动。
3
用异丙醇清洁支架表面和传感器支架上的三个接触 点表面。
4
长沙工控帮教育科技有限公司
注释/图示 操作
xx1400001641
在上紧传感器的紧固螺钉时轻轻向下按传感器,降 气固定在两个可能位置中的一个上。
在上紧螺钉时,不要用力把摆锤外壳推到边上。
5
检查传感器
注释/图示 操作
如果仪器显示其他内容,请按照第50页的校 准传感器步骤中的说明对其进行调整。
调整仪器,以便在 Port/Sensor 下方显示出 A B(不闪烁)。
注意
此时应该看到 (A B),而不是 (A-B)。
1
等待数秒直到传感器稳定,读取仪器所显示 的值。
长沙工控帮教育科技有限公司
2注释/图示 操作
安装在水平面上的传感器:
xx0300000261
小心的取下传感器,将其旋转 180°,然后将 其安装到校准盘上的相应孔型中。请慢慢小 心转动,以防改变传感器的值。
等待数秒,直到传感器稳定。
注意
注意不要更改校准盘的位置。
3
安装在垂直面上的传感器:
xx1400001642
在第50页的校准传感器中介绍了相关校准操 作。
读取 A 和 B 的值。
将读数与步骤 2 中获得的读数进行比较。如 果 A 或 B 的读数与之相差 0.002 以上,或如 果极性相同,则必须重新校正传感器。
4
长沙工控帮教育科技有限公司
3 校准
3.1 校准服务例行程序中的功能
校准类型
校准服务例行程序由两个不同的部分组成:
• Calibration Pendulum II(机器人原位置,CalPend)
• Reference Calibration (RefCal)
发展概述
下表显示了将各功能引入校准服务例行程序的时间。
注释 引入起始版本
功能
不必再对上臂的轴 3/4 进行校准。
5.0.5 适用于 IRB?6600/6650/7600 的高 性能校准例行程序(称为 flip-flop)
不再需要切换窗口和手动微校。
5.0.7 自动微校
仅对 6 轴机器人有效。
5.0.7 Reference calibration
5.13.01 仅在 Levelmeter 2000(而非
RAPID 程序)中进行传感器校准
长沙工控帮教育科技有限公司
3.2 Calibration Pendulum II
3.2.1 关于 Calibration Pendulum II
使用Calibration Pendulum II
Calibration Pendulum II 用于现场,可恢复机器人原位置(例如在从事检修活动之 后)。(Calibration Pendulum II 是服务例行程序 Calibration Pendulum 中的一个功 能。)
Calibration Pendulum II 的原理
在校准程序中,首先在参照平面上测量传感器的位置。然后,将摆锤校准传感器放在 每根轴上,机器人达到其校准位置,从而将传感器差值降低到接近于零。
外围设备
校准期间,机器人的上臂必须不受任何外围设备的影响。如安装工具和类似情况,将 导致出现错误的校准位置。
所需工具
执行 Calibration Pendulum II 所需的工具在第39页的校准设备中进行了说明。
获得最佳结果的前提条件
• 用异丙醇清洁机器人的所有接触面。
• 用异丙醇清洁摆锤的所有接触面。
• 检查并确认在机器人上安装摆锤的孔中没有润滑油和颗粒。
• 不要触摸传感器或摆锤上的电缆。
• 检验并确认当安装在机器人上时,摆锤的电缆不是固定悬挂的。
• 将摆锤安装到法兰(只适用于大型机器人)上时,尽可能将螺丝拧紧。螺丝锥 面要与法兰锥面紧紧贴合,这一点非常重要。
• 使用调整盘和 Levelmeter 定期检查和校准(如需要)传感器,请参阅第54页的 检查传感器和第47页的校准传感器(校准摆锤)和 Levelmeter 2000.
长沙工控帮教育科技有限公司
3.2.2 准备校准,CalPend
准备校准
按照以下程序使用 Calibration Pendulum II (CalPend) 准备校准。
注释 操作
请参阅第14页的校准安装在不同位置的 机器人
验证机器人的安装位置,以便能用 Calibration Pendulum II 校准它。
1
请参阅机器人产品手册。
请确保机器人已做好校准的准备。即,所有维修或 安装活动已完成,机器人已准备好运行。
2
在第39页的校准设备一节中进行了说 明。
检查并确认用于校准机器人的所有必需硬件均已提 供。
3
从机器人的上臂取下所有外围设备(例如,工具和 电缆)。
4
请参阅第67页的校准传感器安装位置,
CalPend中的参照和校准传感器的安装 位置。
取下用于安装校准和参照传感器的表面上的所有盖 子,用异丙醇清洁这些表面。
注意!同一校准摆锤既可用作校准传感器也可用作 参照传感器,具体取决于当时所起的作用。在校准 程序中,摆锤可称为校准传感器或参照传感器,具 体取决于当时所起的作用。
5
用异丙醇清洁导销孔。
6
在第44页的启动 Levelmeter 2000中 进行了说明。
连接校准设备和机器人控制器,并启动 Levelmeter 2000。
7
请参阅第62页的校准所有轴, CalPend。
校准机器人。
8
请参阅第116页的验证校准。
检验校准。
9
长沙工控帮教育科技有限公司
3.2.3 校准所有轴, CalPend
简介
本节介绍如何使用校准摆锤工具(在第39页的校准设备一节中进行了说明)执行每根 轴的实际微校。
传感器安装位置
不同型号和不同轴之间安装校准摆锤(传感器)的位置会有所不同。第67页的校准传 感器安装位置,CalPend中显示了各个位置。
校准顺序
必须按升序顺序校准轴,即 1 - 2 - 3 - 4 - 5 - 6。
利用校准摆锤校准
以下程序详细介绍了如何使用校准摆锤微校机器人。
注释 操作
准备机器人校准,请参阅第61页的准备校 准,CalPend。
1
请参阅第17页的校准范围和正确轴位置。
微调待校准的机器人轴,使其接近正确的校 准位置。
2
请参阅第64页的更新转数计数器。
更新转数计数器(粗略校准)。
3
请参阅第67页的校准传感器安装位置,
CalPend。
仅对轴 1 有效!
将定位销安装到机器人基座中。
注意
确保连接面清洁,没有任何裂痕和毛刺。
4
长沙工控帮教育科技有限公司
注释 操作
请参阅第67页的校准传感器安装位置,
CalPend。
从 FlexPendant 启动校准服务例行程序,并 按照说明操作,其中包括在需要时安装校准 传感器。
警告
根据 FlexPendant 上的说明在机器人上安装 传感器后,单击“确定”便会启动机器人运动!
确保机器人的工作范围内没有任何人!
5
将摆锤安装到转动盘需要适配器(全套工具 中有提供)。货号在第40页的校准摆锤组合 的内容 3HAC15716-1一节中进行了说明。
关于如何在实际校准每根轴之前处理校准程 序,在第115页的关于 FlexPendant 的 Calibration Pendulum II 程序中进行了说 明。
注意
如果要将摆锤安装到垂直平面上,在上紧紧 固螺钉时,轻轻按下摆锤。必须注意两个定 位销居中并接触支架的下孔边缘。在定位销 的上方和边上应该有一点点活动空间。在上 紧摆锤紧固螺钉时,不要用力把摆锤外壳推 到边上。
!
xx1400001568
注意
在校准悬挂机器人的轴 1 时:抵着定位销向 下按摆锤,然后将其固定在位(比如用橡皮 筋)。
点击 OK(确定)。
许多信息窗口将在 FlexPendant 上短暂闪 过,但在显示具体操作之前无需采取任何操 作。
6
请参阅第116页的验证校准。
完成校准后,确认所有已校准轴的位置。
7
断开所有校准设备,重新安装所有保护盖。
长沙工控帮教育科技有限公司
83.2.4 更新转数计数器
简介
本节介绍如何对每根操纵器轴执行粗略校准,即使用 FlexPendant 更新每根轴的转数 计数器值。
第 1 步 - 手动运行机械臂到零位
按本步骤手动将机械臂运行到零位。
注释 操作
选择?逐轴?动作模式。
1
请参阅第17页的校准范围和正确轴位置。
微调操纵器,使校准标记位于公差范围内。
2
IRB 140、1400、2400、4400、
6600ID/6650ID、6640ID:轴 5 和轴 6 必须 一起定位!
第65页的步骤 2 - 使用 FlexPendant 储存转 数计数器设置。
定位好所有轴之后,存储转数计数器设置。
3
轴 4 和轴 6 的正确校准位置
当操纵器运行至校准位置时,应确保下述操纵器的轴 4 和轴 6 正确定位,这一点极为 重要。否则,这些轴可能会按错误的顺序进行校准,从而导致操纵器校准错误。
确保这些轴按照正确的校准值而不仅仅是校准标记进行定位。可在位于下臂上底座或 机架上的凸缘板下的标签上找到正确的校准值。
操纵器出厂时已正确定位,因此在转数计数器更新前,切勿在通电状态下旋转轴 4 或 轴 6。
如果在更新转数计数器之前将下述各轴从其校准位置旋转一周或数周,就会因齿轮速 比为非整数而偏离正确的校准位置。这将对以下机械臂产生影响:
轴 6 轴 4
操纵器变型
是 是
IRB 52
是 是
IRB 140
否 -
IRB 260
否 否
IRB 460
否 -
IRB 660
是 -
IRB 760
否 否
IRB 1520ID
是 否
IRB 1600
否 否
IRB 2400
否 否
IRB 2600
否 否
IRB 4400
否 否
IRB 4600
否 IRB 6400 / 200kg 是
否 IRB 6400R / 200kg 是
是 是
IRB 6650S
长沙工控帮教育科技有限公司
轴 6 轴 4
操纵器变型
否 是
IRB 6620
否 是
IRB 6620LX
否 是
IRB 6640 - 180/2.55
是 是
IRB 6640 - 235/2.55、
205/2.75、185/2.8、130/3.2
否 是
IRB 6640ID - 170/2.75、
200/2.55
是 是
IRB 6660
否 是
IRB 6700-235/2.65, -205/2.80, -175/3.05, -150/3.20, - 200/2.60, -155/2.85
否 否
IRB 6700-300/2.70, -245/3.00
是 是
IRB 7600
如果校准标记似乎错误(即使电机校准数据正确),请尝试旋转轴一次、更新转数计 数器并再次检查校准标记(如有需要,两个方向都尝试)。
步骤 2 - 使用 FlexPendant 储存转数计数器设置
使用此程序利用 FlexPendant (IRC5) 储存转数计数器设置。
操作
在 ABB 菜单上,点击校准。
1
与系统相连的所有机械单元将连同校准状态一起显示。
点击所涉及的机械单元。
2
显示一个屏幕,点击转数计数器。
en0400000771
长沙工控帮教育科技有限公司
操作
点击更新转数计数器...。
将显示一个对话框,警告更新转数计数器可能会改变预设操纵器位置:
• 点击是更新转数计数器。
• 点击否取消更新转数计数器。
点击是显示轴选择窗口。
3
选择需要更新转数计数器的轴:
• 勾选左边的复选框
• 点击全选更新所有的轴。
然后点击更新。
4
显示一个对话框,警告更新操作不能撤消:
• 点击更新以继续更新转数计数器。
• 点击取消以取消更新转数计数器.
点击 Update(更新)以更新选定的转数计数器,并取消轴列表中勾选的项。
5
小心
If a revolution counter is incorrectly updated, it will cause incorrect manipulator positioning, which in turn may cause damage or injury!
每次更新后,都应仔细检查校准位置。请参阅第117页的检查零位。
6
长沙工控帮教育科技有限公司
3.2.5 校准传感器安装位置,CalPend
简介
本节说明了使用 Calibration Pendulum II 的所有机器人系统上的所有校准传感器的安 装位置和方向.
卸除设备
在将传感器安装到机器人之前:
• 确保没有可能影响传感器位置的接线!
• 从轴 1 卸下所有位置开关。但不能将传感器安装在参照位置!
可在机器人产品手册中找到有关校准、其他校准位置等内容的更多信息.
释放压缩弹簧
在校准轴 1 后,释放摆锤校准工具上的压缩弹簧。
在校准 IRB 260 和 IRB 660 的轴 6 后也要释放弹簧。
有关如何压缩/释放弹簧的说明,请参阅第114页的准备在轴 1 和 6 上使用传感器CalPend.
长沙工控帮教育科技有限公司
IRB 52, IRB 140, IRB 1600, IRB 1520ID, IRB 2600, IRB 4600
下图显示机器人上参照传感器和轴传感器的安装位置和方向。请注意,摆锤一次只能 安装在一个位置!另请注意,每根轴上传感器的方向始终相同!
参考位置 IRB 52
xx1200000107
底座处参照位置中用作参照传感器的校准摆锤 A
长沙工控帮教育科技有限公司
参考位置IRB 140
xx0200000244
底座处参照位置中用作参照传感器的校准摆锤 A
参照位置 IRB 1600, IRB 2600, IRB 4600(底座上无校准支架)
xx0500002490
底座处参照位置中用作参照传感器的校准摆锤 A
长沙工控帮教育科技有限公司
参照位置 IRB 4600(底座上有校准支架)
xx1400001051
底座处参照位置中用作参照传感器的校准摆锤,安装在校准支架上(如有)
A
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
参考位置IRB 1520ID
A
xx1100000428
底座处参照位置中用作参照传感器的校准摆锤 A
轴 1IRB 52
xx1200000109
用作校准传感器的校准摆锤,轴 1 A
定位销,68 mm B
连接螺丝 C
长沙工控帮教育科技有限公司
轴 1IRB 140
xx0200000245
用作校准传感器的校准摆锤,轴 1 A
定位销,68 mm B
校准摆锤连接螺丝 C
轴 1IRB 1600/1600ID, IRB 2600, IRB 4600
xx0500002491
用作校准传感器的校准摆锤,轴 1 A
定位销,68 mm B
连接螺丝 C
长沙工控帮教育科技有限公司
轴 1IRB 1520ID
A
B C
D
xx1100000430
用作校准传感器的校准摆锤,轴 1 A
校准工具块 B
定位销 C
校准摆锤连接螺丝 D
长沙工控帮教育科技有限公司
轴 2IRB 52
xx1200000108
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
轴 2IRB 140
xx0200000246
用作校准传感器的校准摆锤,轴 2 A
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
轴 2IRB 1600/1600 ID, IRB 1520ID, IRB 2600, IRB 4600
xx0500002492
用作校准传感器的校准摆锤,轴 2,IRB 1600 和 IRB 1520ID A
用作校准传感器的校准摆锤,轴 2,IRB 2600 和 IRB 4600 B
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
轴 3、4、5 和 6 IRB 52, IRB 140, IRB 1600/1600ID, IRB 1520ID, IRB 2600, IRB 4600
xx0200000266
用作校准传感器的校准摆锤,轴 3 A
转动盘适配器 B
传感器锁紧螺丝 C
传感器电缆,传感器 B D
传感器电缆,传感器 A E
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
IRB 1410
下图显示机器人上参照传感器和轴传感器的安装位置和方向。请注意,摆锤一次只能 安装在一个位置(同一摆锤既可用作参照传感器,也可用作校准传感器)。
参考位置IRB 1410
xx0200000248
参照传感器位置中的校准摆锤 A
长沙工控帮教育科技有限公司
轴 1IRB 1410
xx0200000249
校准传感器,轴 1 A
定位销,68 mm B
校准摆锤连接螺丝 C
长沙工控帮教育科技有限公司
轴 2IRB 1410
xx0200000281
校准传感器,轴 2 A
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
轴 3、4、5 和 6 IRB 1410
xx0200000266
校准传感器 A
转动盘适配器 B
传感器锁紧螺丝 C
传感器电缆,传感器 B D
传感器电缆,传感器 A E
注意
在将摆锤安装到垂直平面上时,一边上紧紧固螺钉,一边轻轻按下摆锤。必须注意 两个定位销居中并接触支架的下孔边缘。在定位销的上方和边上应该有一点点活动 空间。在上紧摆锤紧固螺钉时,不要用力把摆锤外壳推到边上。
长沙工控帮教育科技有限公司
IRB 260, IRB 2400
下图显示机器人上参照传感器和轴传感器的安装位置和方向。请注意,摆锤一次只能 安装在一个位置(摆锤既可用作参照传感器,也可用作校准传感器)!
参照位置 IRB 260 和 IRB 2400
xx0200000250
参照传感器位置中的校准摆锤 A