Volume 21, No.3, 2016, pp. 163-183 DOI:10.6574/JPRS.2016.21(3).3
1輔英科技大學綠色科技研究中心 主任 收到日期:民國 104 年 12 月 29 日
*通訊作者, E-mail: [email protected] 修改日期:民國 105 年 07 月 14 日 接受日期:民國 105 年 07 月 27 日
無人飛航載具監測環境污染之功能
賈澤民
1*摘要
本文係探討利用無人航行載具作為環境污染監測之新技術,環境污染範圍可包含空污及水污等,空 污者計有臭氧、二氧化氮、PM2.5 懸浮微粒及非甲烷碳氫化合物(NMHC)等;水污者則包括廢水偷排放引 起水質的物理、化學或生物特性的變化等。其中無人飛航載具攜帶空氣污染物偵測分析儀器之搭載平台,
曾對高雄市大林蒲地區上空之空氣品質變化進行立體即時之量測。無人飛航載具全機採碳纖維複合材料 製作,並採模組化設計以達到輕量化、高強度之特性;另搭載 GPS 自動導航系統與射頻數據傳輸模組,
能將偵測數據即時結合環境地圖,以顯示現地之污染物即時濃度變化。由於無人飛航載具於空中高速飛 行時會因靜壓降低而造成採樣儀器無法有效採樣,故須設計一空氣膨脹室將機外氣流減速並升壓,以提 供採樣儀器理想之氣流狀態。除此之外,為排除碳纖機身材質對無線電波造成之遮蔽效應,亦對無線傳 輸天線進行模擬與最佳化設計以增進傳輸效能,其所採行技術在國內外皆屬新創。另在水污染偵測管制 方面,可用飛翼船搭配氣體偵測及水質採樣等儀器對重大污染水域定期長時間偵察,所開發之飛翼船係 結合飛機與船舶之整體設計並採用複材之特殊結構,能於水面及近水面上空高速航行並進行採樣與觀測 水污染等任務。這些無人航具所偵獲之立體即時污染數據再結合雲端資料庫,將來可運用在政府或業界 處理環境監控相關之管制作為與緊急應變任務。
關鍵字:無人飛航載具、飛翼船、空氣品質監測、水污染
1. 前言
科學家呼籲世界領袖,2015 年 12 月是扭轉危 險氣候變遷的「最後機會」,致終在巴黎舉辦的聯 合國氣候變遷會議簽署 8 點行動計畫,關鍵目標是 在 2050 年前,將暖化升溫控制在攝氏 2 度以內。
我國環保署長魏國彥也率團前往巴黎參加,返抵台 灣也重申台灣與國際同步的減碳目標, 因為碳排 放確是造成空氣汙染之元凶。
我國空氣污染指標為依據監測資料將當日空 氣中懸浮微粒(PM2.5)測值、二氧化硫(SO2)濃度、
二氧化氮(NO2)濃度、一氧化碳(CO)濃度及臭氧(O3) 濃度等數值,以其對人體健康的影響程度各換算出 該污染物之污染副指標值,再以當日各副指標值之
最大值為該測站當日之空氣污染指標值(PSI)。 指 標值在 100 以下者,即表示該測站當日空氣品質符 合美國環境空氣品質標準中之短期(24 小時或更短) 之平均值,指標值在 100 以上之日,依美國環境保 護署之研究,對身體不好而較敏感的人會使其症狀 更加惡化。
但現今空污監測儀器皆設置於地面站,其所監 測之數據點有限,且對於大氣邊界層風場之變化對 污染物傳送影響缺乏數據,致對污染指數判斷易誤 差,尤其對特殊突發或重大污染事件之分析掌控更 是難以處理。因此,利用無人航行載具搭配環境污 染監測之儀器,開發現地、即時、三度空間之空污 監測技術實屬必要。經由此技術與監測資料進行統 計分析,有助於釐清國內日益嚴重的空氣品質問題,
並有效地應用於天然及人為災變預警追蹤技術上,
且可更進一步結合國外研究單位,戮力解決全球氣 候變遷問題,促成所發展的新穎技術能與國際合作 研究接軌,提升台灣在本技術領域之國際聲望。
此外,經由電影”看見台灣”讓國人聚焦在我國 的環境保護,那河口怵目驚心的圖像令人映象深刻,
近來一場場來自大型企業不負責的河川汙染事件 更將國人關心河川汙染與破壞的心推向高峰,當我 們的河川、湖泊及海洋被汙染,這對居民健康與生 態保育的影響是相當深遠的。為能確切提升水域監 控能力,我們也需要一個更即時有效的水域汙染偵 測工具,因此可經由聚集飛航載具專業、汙染物偵 測專業、雲資管理專業及環境決策雲端運算專業來 一同籌建更具智慧的水域汙染偵查模式,未來的成 果將可以讓海岸及河川流域的管理更為系統化與 即時有效。
圖 1 環境污染廣見於日常生活中
2. 無人飛航載具之氣象與 空氣污染監測
無人飛航載具(Unmanned aerial vehicle, UAV) 始於二次大戰期間德國,迄今仍以在軍事上之用途 為大宗,因其具有:(1) 成本低,費用少;(2) 不 易受環境條件影響,適應性強; (3)大幅降低後勤支
援/週期成本; (4) 避免飛行員傷亡及降低人力需求 等,最近 10-20 年已廣範應用於政府與各種商業用 途(表 1)。
表 1 UAV 在民用航空方面的應用項目
政府應用 商業應用
邊界管制 農漁業管理 海洋巡邏與緝私 快遞貨運 打擊罪犯、反恐保安 油管與電纜監測
搜索救難 空中攝影與廣告 森林火災監視 電訊中繼服務 地面與海上交通監視
颱風與氣象觀測 國土資源規劃與監測
無人飛航載具在氣象與空氣污染方面之最新 研究如表 2 所示,目前其主要應用於氣象與氣候變 遷之研究。本文所述之 O3、NO2、PM2.5 與 NMHC 之監測,尚未見於文獻中。目前無人飛航載具在氣 候與空氣污染方面之研究應用,首推美國加州聖地 牙哥大學 Prof. V. Ramanathan 之研究團隊,其主要 應用於棕色雲(Blown Cloud)之研究,此團隊此方面 之研究成果於 2007 年發表文章於 Nature 期刊 (Ramamathan et al., 2007);澳洲 Aerosonde 也相當 有名,國內台大颱風之追風計畫即使用 Aerosonde 進行颱風之氣象觀測,此飛機 1992 年由 Hollond 首次發表(Holland et al., 2001);德國 Braunschweig 科技大學亦自行研發輕小,但具自動導航之氣象監 測無人飛航載具(Kroonenberg et al., 2008);美國能 源部則發展適合超高空偵測之 UAV,可進行對流 層以上之觀測(16km 以上)(Stephens et al., 2000)。
輔英科大研究團隊於 2010 年獲得教育部補助 成立『立體環境即時監測聯合技術發展中心』,在 2010-2012 三年內籌建完成:(1) 無人飛航載具立 體環境探測技術;(2) 繫留氣球高空環境探測技術;
(3) 長程污染傳輸追蹤技術;(4) 即時無線傳輸高 空環境監測儀之發展技術;(5) 大氣污染物分析技 術;(6)立體環境資訊加值應用技術等 (見圖 2)。
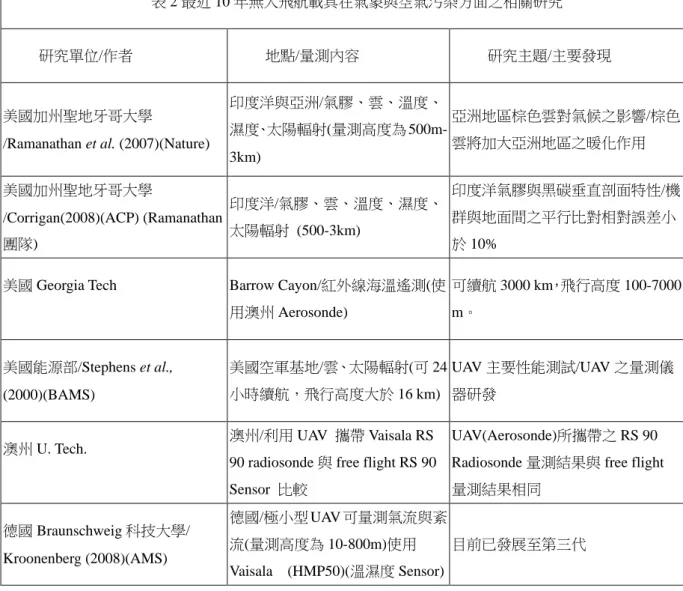
表 2 最近 10 年無人飛航載具在氣象與空氣污染方面之相關研究
研究單位/作者 地點/量測內容 研究主題/主要發現
美國加州聖地牙哥大學
/Ramanathan et al. (2007)(Nature)
印度洋與亞洲/氣膠、雲、溫度、
濕度、太陽輻射(量測高度為 500m- 3km)
亞洲地區棕色雲對氣候之影響/棕色 雲將加大亞洲地區之暖化作用
美國加州聖地牙哥大學
/Corrigan(2008)(ACP) (Ramanathan 團隊)
印度洋/氣膠、雲、溫度、濕度、
太陽輻射 (500-3km)
印度洋氣膠與黑碳垂直剖面特性/機 群與地面間之平行比對相對誤差小 於 10%
美國 Georgia Tech Barrow Cayon/紅外線海溫遙測(使 用澳州 Aerosonde)
可續航 3000 km,飛行高度 100-7000 m。
美國能源部/Stephens et al., (2000)(BAMS)
美國空軍基地/雲、太陽輻射(可 24 小時續航,飛行高度大於 16 km)
UAV 主要性能測試/UAV 之量測儀 器研發
澳州 U. Tech. 澳州/利用 UAV 攜帶 Vaisala RS 90 radiosonde 與 free flight RS 90 Sensor 比較
UAV(Aerosonde)所攜帶之 RS 90 Radiosonde 量測結果與 free flight 量測結果相同
德國 Braunschweig 科技大學/
Kroonenberg (2008)(AMS)
德國/極小型 UAV 可量測氣流與紊 流(量測高度為 10-800m)使用 Vaisala (HMP50)(溫濕度 Sensor)
目前已發展至第三代
3
擬研防災對策 主管機關緊急
通報系統
長程傳輸技術
工廠煙流排放監測
氣流及土石 流監測
污染物分析技術立體 環境資訊加值技術
臭氧層監測
污染氣團
土石流 2km
10km
立體環境即時監測技術開發架構圖
圖 2 立體環境即時監測技術架構圖
2.1 無人飛航載具空氣品質監測
2.1.1 無人飛航載具之性能與裝備
無人飛航載具近年來由於其多用途以及能突 破空間限制之特性,使得產業界與學術界紛紛投入 無人飛航載具的研究發展領域。諸如氣象資訊的搜 集,水土保持與環境保護探勘,數位通訊中繼等等,
雖然研發目的各有不同,但無人飛航載具已為許多 的研究工作提供了一個良好的研究平台與新的研 究方向。另外由於近年來在小型電腦、相關周邊配 備、電子感測元件與光學遙測等設備在技術的快速 進展,已使得無人飛航載具已經逐漸具有長程視距 外飛行的發展潛力。
在科學用途方面,無人飛航載具目前主要以提 供空照視野,作於天然災害災情拍攝用途,以及即 時控制及分析等任務。基於以上用途之需求,自主 飛行的能力成為無人飛航載具的首要目標,在先進 航電系統搭配飛控導引律之設計下,製作具備自主 飛行能力的飛行載具已具備高度實用性,再加上其 設計所需的經費遠較載人的航空器為低,且不需考 慮駕駛員之人身安全顧慮,所以無人飛航載具在技 術上與成本上具備有雙重優勢。
一般而言,無人飛航載具可區分為三大系統,
分 別 為 載 具 本 體 、 地 面 控 制 站 (Ground Control Station)及酬載(Payload)系統。所謂載具本體係指不 包含酬載系統的完整飛行載具系統,具有起飛、降 落及飛航功能。地面控制站則指位於地面,可即時
接收載具及酬載系統下傳之資訊鏈路,並以適當方 式將所接收之下傳資訊顯示給操作人員,供其操控 載具及酬載系統。酬載系統係指可以安裝在載具本 體上,並配合載具本體及地面控制站執行特定任務 之裝備。
本文中無人飛航載具製作之工作項目為依據 空污監測之需求,建造可完成指定空中偵測任務之 機型,工作內容包括無人飛航載具相關的氣動力分 析、機體設計、飛行導航與控制模組設計、遠距無 線傳輸技術之開發以及空污採樣儀器整合空間之 設計。
本團隊已開發完成之長滯空無人飛航載具,可 同時量測氣象參數及大氣污染指數擴散,滯空時間 約為 4 小時,高度約在 10000 呎,機身載重為 20 公斤,最大空速約 130 公里/小時,巡航速度為 45 公里/小時,採用不須增壓之航空汽油活塞引擎,
飛航全程由 GPS 自主導航,可提供監測儀器完整 穩定之運作平台,在空中監測之訊號可即時回傳至 地面站,其氣象與空氣品質監測之基本原理如圖 3 所示。
在空污染源之量測部分,則可探測 O3、NO2、
PM2.5 及 NMHC 等濃度分佈情況,可將探測儀器 設計安置於機體內,由空中進行偵測,本團隊已於 高雄大林浦完成 O3、NO2及 NMHC 量測 30 批次 每次一小時之監測,成果良好。由於本計畫採用完 全自行開發之長滯空無人飛航載具,故可視需要隨 時修改以利任務遂行。
圖 3 無人飛航載具氣象與空氣品質量測之基本原理
於執行 UAV 空污量測之方法步驟敘述如下:
1. UAV 之整體性能驗證,包括載重量最大極限、
滯空最長時間、滯空高度極限、最大及最低空 速、自主航行精確度、可用機體空間、最大陣 風承受能力、防水設計能力等等。
2.各項空氣品質參數量測元件之規格設計及獲得,
包括偵測 O3、NO2 與 NMHC 等之感測器,將 其設計安置於 UAV。
3.針對各項空污量測儀器設計安裝於 UAV 之方 式。
4.進行氣象及空污量測裝備安裝於 UAV 之系統設 計及施工。
5 執行空中飛行之系統驗證、測試。
6.向民航局提出監測任務空域之申請。
7.執行環境變化測量與監控。
現將無人飛航載具監測空污之性能與裝備情 況分述於後:
2.1.2 無人飛航載具設計
本團隊之無人飛航載具機體採用模組化設計,
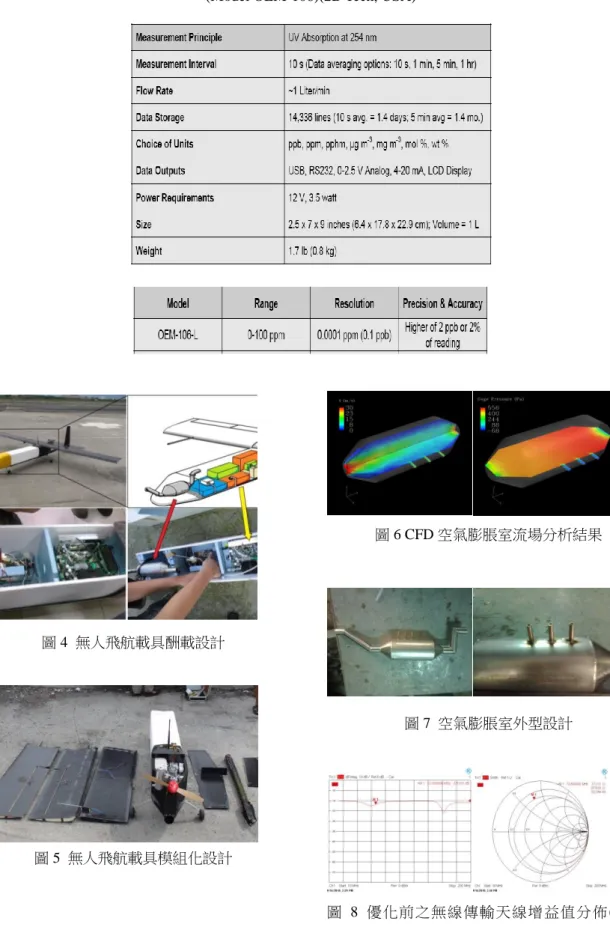
其尺寸與重量規格見表 3。無人飛航載具採用模組 化設計之優點除了便於拆裝整備以外,受損或故障 之模組可直接拆換也增加了實際執行任務時之適 應能力。模組化機身與籌載設計見圖 4 與圖 5,針 對不同之偵測需求,僅需更換不同之籌載模組即可,
而無需變更機身其他設定,圖 4 顯示無人飛航載具 籌載模組之裝配情形,所有環境偵測儀器皆容納於 機身籌載模組之中。
2.1.3 空氣膨脹室設計
本團隊之無人飛航載具需搭載可探測 O3、NO2 及 NMHC 之探測儀器進行偵測,由於以往無論學 界或業界皆未有針對高速高空飛行偵測而設計之 探測儀器,因此如何在高速之飛行狀態下提供探測 儀器良好的進氣品質即為本研究之設計重點之 一。
因無人飛航載具飛行速度約為時速六十公里 以上,高速流動之氣流所造成之低壓將造成採樣儀 器無法抽取所需探測之空氣,因此設計一空氣膨脹
室將空氣減速並增壓以利採樣抽取。而空氣膨脹室 之體積如果太大將造成過多空氣滯留於膨脹室內,
如此將影響採樣之準確性。為解決以上問題,本團 隊使用計算流體力學之數值模擬,設計空氣膨脹室 之尺寸與外型,以使膨脹室能提供採樣儀氣良好之 氣流狀態。
圖 6 為空氣膨脹室之流場數值模擬結果,可以 看出膨脹室內主要流場流向皆為自進氣口向排氣 口流出,並無明顯滯流或回流之情形,如此可避免 膨脹室內滯流過多前一時間點的空氣,可使採樣儀 器能偵測即時的空氣變化。數值流場模擬空氣膨脹 室之速度分布與壓力分布結果顯示此膨脹室可提 供減速且具較低動能之氣流。
圖 7 為無人飛航載具搭載之空氣膨脹室實體,
空氣膨脹室以不鏽鋼焊接製成,此材質可抵抗酸洗 侵蝕且不與空氣中之化學成分反應,可確保儀器採 樣之準確性。
2.1.4 無線傳輸天線模擬設計
由於本無人飛航載具採用全碳纖維複合材料 材質,而碳纖維複合材料具有半導體之特性,在天 線與碳纖維機身交互作用下,天線實際接收電磁波 之效能大幅偏離原先設計值。為增進遠距離傳輸與 控制之效能與可靠性,遂於空軍航空技術學院航電 系之電磁波實驗室進行無線傳輸天線之性能測詴 與模擬,圖 8 中可以看出虛線為天線所接收之電磁 波頻率 72.8MHz,在碳纖維機身的影響下,其衰減 率遠大於原先之設計值,其最佳接收區間反而落在 50MHz 與 90MHz,因此天線必須重新設計,並且 在設計時即須考慮探討體機身之干涉作用。 圖 9 為重新設計之天線之效能測試,可看出最佳接收效 能之區段已可涵蓋 72.8MHz 之工作頻率,實際測 試結果顯示其有效接收距離可增加達兩倍以上。
2.1.5 無人飛航載具自動導航飛行結 果
本團隊曾執行高雄市政府環保局”應用無人飛 航載具收集偵測空中空氣污染物計畫”計畫,於高 雄市大林蒲已完成約 30 航次,每航次一小時空氣
品質監測任務。飛行任務時間為 2010 年 8 月至 10 月,飛行高度為 250±50m、500±100m 與 750±150m 三種高度範圍,圖 10 為實際執行之情形。
無人飛航載具同時具備自動導航與自動駕駛 之功能,可由地面人員依任務需求控制飛行,達到 遠端遙控功能,並能記錄飛機飛行位置姿態等資訊。
此系統結合 GPS 定位以及活動地圖顯示功能,設 定時僅須在地圖上設定導航點即可自動規劃自動 導航路線。圖 11 為無人飛航載具自動導航之飛行 軌跡結果,可以看出飛行軌跡繞著四個導航點盤旋,
且軌跡之誤差值極小,可滿足精確導航之需求。
圖 12 為無人飛航載具執行任務飛行時之高度 變化情形,飛行高度為 250±50m、500±100m 與 750±150m 三種高度範圍,可看出飛行高度皆能維 持在±10m 之內。而造成飛行高度變化之原因在於 大林蒲觀測現場地勢空曠,因此陣風較強。無人飛 航載具盤旋飛行每一次轉彎時,因為陣風遭成機體 升力不對稱分佈,進而影響總升力與阻力,因此無 人飛航載具在轉彎時會產生較大的高度變化。在風 勢較強的時段飛行之航次,高度變化圖上會出現周 期性的高度突降與緩慢回升之變化情形,此現象皆 為急轉彎時因側風影響所造成。
2.1.6 無人飛航載具飛行偵測結果
本次 UAV 空氣品質監測時間為 2010 年 8 月 20-22 日至 10 月 24-26 日,共計 30 航次之監測。
其中航次 13 與航次 17 之飛行高度為 500m;航次 14 之飛行高度為 750m,其餘每航次之平均飛行高 度皆為 250 m。在執行空中監測時每次飛行時間以 滿足一小時之量測所需。為求對機場飛航安全影響 降至最低,於申請時段內將參考機場航班時刻表,
於航班較少之空檔時段進行實驗,施放 UAV 時並 派駐一名聯絡員至小港機場近場管制台。若遇機場 班機進場接近申請之空域,則由塔台與聯絡官協調
通知,UAV 可於一分鐘內下降至高度 300 呎以下,
以維持機場空域安全。
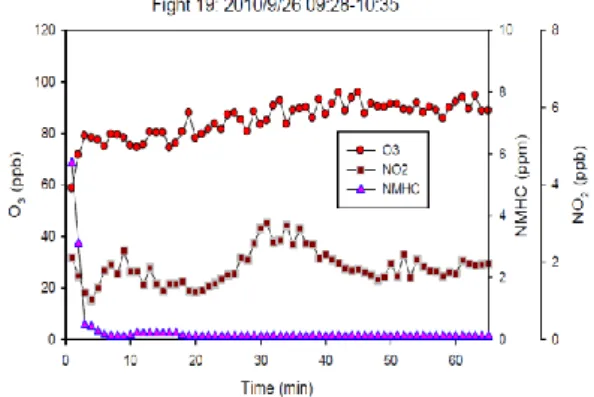
圖 13 為無人飛航載具執行 O3, NO2 與 NMHC 濃度變化觀測結果時序圖,各項濃度變化合理範圍,
顯示監測儀器能夠即時偵測空氣中污染物濃度之 變化。為驗證空中監測結果之準確性,監測結果之 數據皆與地面空氣品質監測站互相比對,圖 14 為 UAV 每航次空氣品質觀測結果與同時間大林埔空 品站監測結果之比較。顯示 UAV 監測結果與空品 站有些微之差異,其中 UAV 之臭氧監測結果高於 空品站約 7-16 ppb,而 UAV 之 NO2 則低於空品站,
後者之差異造成,可能與空品站較接近臨海工業區 有關。
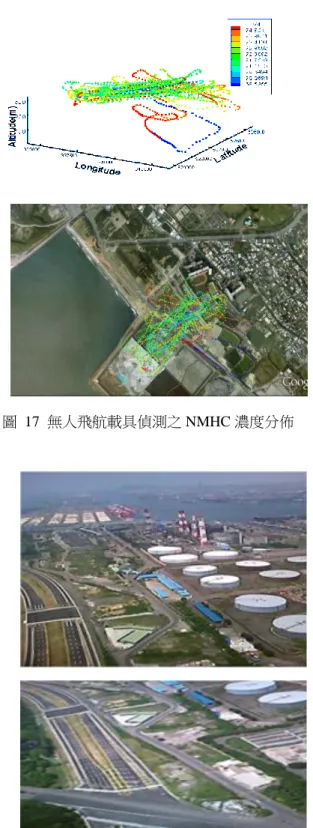
圖 15~17 為無人飛航載具執行 O3, NO2 與 NMHC 濃度變化觀測結果於三度空間中之分佈情 形,並可與衛星空照地圖以顯示現地之立體即時污 染物濃度變化。
本團隊執行無人飛航載具飛行任務時,皆搭載 機上攝影系統協助偵測。圖 18 無人飛航載具在大 林蒲飛行時進行空拍之照片,可看出無人飛航載具 可提供穩定之空中拍攝平台以進行環境監控,空拍 照片具備足夠之解析度可搭配空氣品質偵測結果 進行後續分析。
表 3 UAV 外型規格
無人飛行載具規格
翼展 346cm 全長 249cm 翼前緣至機頭 125cm 機身寬高 23X23cm 開放式載物平台23X80cm (艙蓋可以配合酬載另製)
空重 8kg
最大起飛重 20kg
表 4 空氣品質偵測器規格 (Model OEM-106)(2B Tech, USA)
圖 4 無人飛航載具酬載設計
圖 5 無人飛航載具模組化設計
圖 6 CFD 空氣膨脹室流場分析結果
圖 7 空氣膨脹室外型設計
圖 8 優化前之無線傳輸天線增益值分佈(center frequency at 72.8 MHz)
圖 9 優化後之無線傳輸天線增益值分佈 (center frequency at 72.8 MHz)
圖 10 無人飛航載具於大林蒲執行任務
圖 11 地面站顯示之無人飛航載具導航點與飛行軌 跡
圖 12 無人飛航載具執行任務之高度變化
圖 13 無人飛航載具偵測之空氣污染物分佈情形
圖 14 無人飛航載具偵測之 O3, NO2 與 NMHC 濃 度變化與地面監測站數據比對
圖 15 無人飛航載具偵測之臭氧濃度分佈
圖 16 無人飛航載具偵測之二氧化氮濃度分佈
圖 17 無人飛航載具偵測之 NMHC 濃度分佈
圖 18 無人飛航載具於大林蒲石化工業區空拍結果
2.2 利用無人飛航載具(UAV)監 測局部天氣變化
2.2.1 確立 UAV 大氣參數量測之精
準效能
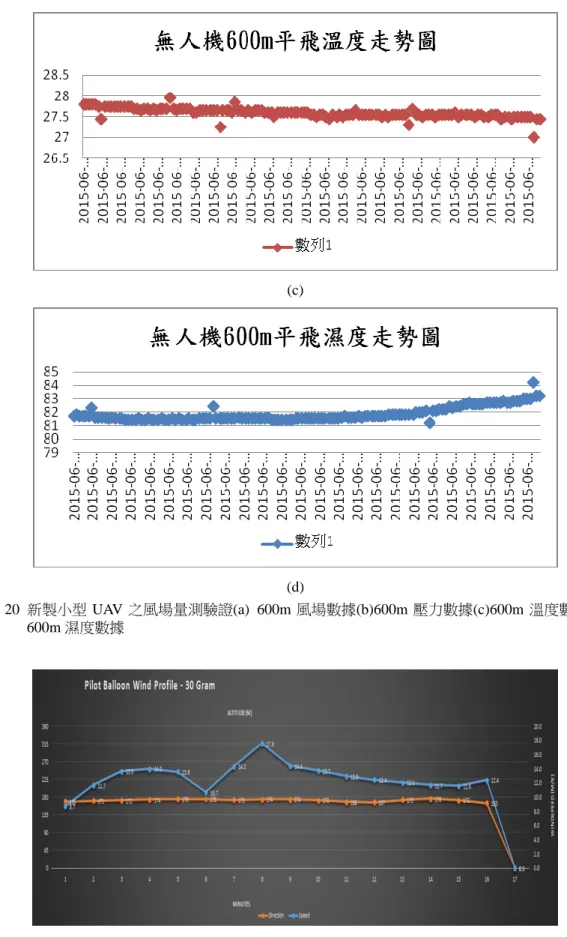
A. 於 高 屏 溪 屏 東 大 橋 下 進 行 本 團 隊 新 製 小 型 UAV 與經緯儀探空汽球之風場 量測驗證,並 同時量測當地溫溼度數據,本次驗証過程及結 果如圖 19 及圖 20 所示。經整理 UAV 與探空汽 球同步量測驗證風場數據比較結果可發現當日 風場在不同高度皆維持在約 170 度之南風,風 速從地面到高空變化從 8.5 m/s 到 14.5 m/s,本 次測試之小型 UAV 只飛到 600 m 高度。由圖 21 比對可知 UAV 量測數據與探空汽球數據吻 合,另外,將高度 600 公尺之 UAV 數據予以分 析,可知飛機在同一高度自動飛航時之高度維 持及量測數據極為穩定,因此經由驗證此 UAV
氣象監測系統可作為後續執行氣象觀測任務之 可靠載台。
圖 19 UAV 與探空汽球同步量測驗證風場數據
(a)
(b)
(c)
(d)
圖 20 新製小型 UAV 之風場量測驗證(a) 600m 風場數據(b)600m 壓力數據(c)600m 溫度數據(d) 600m 濕度數據
圖 21 新製小型 UAV 與經緯儀探空汽球之風場量測驗證
B.另於 2013 年冬季分別於 11 月 21 日、12 月 4 日、
12 月 9 日三段時間用 UAV(圖 22)在屏東里港附 近執行實際驗測氣象溫度、溼度、氣壓、高度,
並透過飛機飛行方式求出風向與風速,透過屏東 機場探空站比對 UAV 資料,以 12 月 9 日為例,
結果顯示二者隨高度分佈一致(圖 23),UAV 溫 度在高度 200-300 公尺有逆溫現象,屏東站在 150-300 公尺一出現逆溫現象。UAV 溫度露點差 結果顯示,低對流層屬於乾燥區,屏東站亦有此 現象,顯示 UAV 觀測資料趨勢有不錯結果。唯 UAV 溫度比屏東站高 1-2℃,此一方面可能是 UAV 溫度感測器尚未調校所致,另一方面也可 能是屏東機場與屏東里港地理位置不同,造成溫 度有 1-2℃差異。風向而言,UAV 250 公尺以下 為西北風,300-650 公尺為東北風,650 公尺以 上又轉為西北風,屏東除了 150-300 為東北風,
與 UAV 略有不同外,其於高度之風向與 UAV 一 致。又與 WRF 模式模擬結果比較,WRF 模擬 12 月 9 日上午八點南部風向(圖 24),大致為北 風與西北風,與 UAV 結果一致。UAV 透過模式 與屏東探空站比較,顯示其氣象場分布趨勢準確 良好。
圖22 UAV地面操作系統與飛行至1050公尺俯視圖
圖23 UAV溫溼度與風向與屏東探空站比較。 (上 圖實線為UAV觀測之溫度與露點, 虛線為屏 東探空站之溫度與露點。下圖橫軸為風向,
實線為UAV觀測之風向,虛線為屏東站觀測 之風向)
2.2.2 分析特殊地域氣候發展及豪 雨發展前 UAV 之立體即時大 氣環境偵測
透過 UAV 對邊界層大氣結構觀測分析與研究,
UAV 除了驗證模式模擬結果外,也可在模式中做 同化,加強模式預報精確度,資料作 WRF 同化後,
均能改善 WRF 預報,而 UAV 兼具機動性與立體 觀測能量,預期對於定量降水預報的觀測與模式物 理參數驗證、資料同化均有極大潛力。本團隊主要 在運用 UAV 觀測邊界層發展,並用 WRF 模式配 合資料做四維同化,針對 WRF 邊界層參數化模組 校驗,並模擬對流系統,改善定量降水預報技術,
執行的結果如下:
為探討模擬海風環流變化,分別以馬公探空站 植入 WRF 模式,結果顯示凌晨近地層有離岸之陸 風(圖 25),其上有迴流區。中午以後則有顯著海風
環流產生,海風厚度比陸風深許多。為比較不同地 區探空站對海風環流敏感度,本文將屏東站探空資 料植入 WRF 模式,結果顯示(圖 26)海風強度與發 展厚度比馬公大,顯示小範圍地區不同高空資料,
對海風環流相當敏感,此亦顯示,UAV 未來在海 上無人地區的資料觀測將對局部環流分析有重要 影響。
圖24 WRF模式模擬24小時之2013年12月9日0800LST風場分布情形。(左圖為9公里解析度,右圖為3公里 解析度)
圖25 2013年12月9日馬公探空資料植入WRF模擬海風環流,橫軸中間為陸地,其餘二側為海面。紅色 區為西風區,藍色區為東風區。(左圖為清晨、右圖為中午風場分佈)
圖26 同圖25,但探空站改為屏東測站
3. 無人飛翼船之水域污染 監測
為能確切提升水域污染監控能力,我們也需要 一個更即時有效的水域汙染偵測工具,此可經由整 合水上飛航載具技術、汙染物偵測專業、雲資管理 技術及環境決策雲端運算專業等共同籌建出更具 智慧的水域汙染偵查模式,未來的成果將可以讓海 岸及河川流域的管理更為系統化與即時有效,本團 隊與嘉信遊艇公司執行產學合作,開發完成全球新 創 之 連 翼 構 型 (Joined-Wing) 飛 翼 船 (Wing-in-Ground Craft, WIG) 之設計製造及飛試 工作(賈澤民、等,2013),由於飛行特色突破傳統 技術,大幅提升飛翼船之未來應用性,此外也驗證 其於水面、陸地皆能短距離起降,在空中航行操控 優異,故實為優異性能之三棲載具。可設計利用此 三棲飛翼船當載具(見下圖 27),整合已具備之空拍 與氣象參數偵測能力,進行過去一直無法獲得之水 面及近水面區域之氣象參數量測,相信這種海空界 面敏感關鍵區域之各項參數(如 溫度、濕度、風場、
熱通量( heat flux)等,對海面氣候演變觀測分析必 有助益,而這些近海面數據對推估氣候暖化最有助
益,但也最為缺乏。
其分工與整合構想如圖 28 所示。執行步驟 為:1. 技術一之三棲航具(見圖 29),依技術四 提供之偵測目標區及航行路線規劃自動航行任 務,於目標區上空先進行 200~300 公尺高空航 拍與污染 VOCS 氣體偵測,將此數據回傳地面 管制站後,立即進行資料判讀。2.如無異狀,則 將資料由技術三予以建檔儲存;經判讀發現有 污染或破壞異狀時,則立即調整偵測區域航線,
將降低高度至水面 3~10 公尺高度進行各種污染 物偵測並將資料回傳判讀。3.如經研判有再進一 步判斷研析需要時,則將載具降落水面,於水 面滑行採集及拍照之後攜回地面管制中心進行 精密儀器檢測分析,以判讀污染物種類及濃度。
4.將這些污染數據結合載具自動航行定位與地 理資訊資料,儲存於技術三之智慧雲檔案庫中。
5. 技術四將利用環境專業知識結合智慧雲資料 庫,對於污染物及污染源進行研判,建構完整 環境健康資訊。相信經由此整合系統可大幅提 升水域環境監測管控能力,對水域污染或破壞 事件做到先知快報的防制功能。
整合構想示意圖
空品測站
污染偵測電子鼻 氣象衛星
三棲無人載具
雲端決策 支援平台
汙染偵 測路徑 最佳化
圖 27 智慧型三棲無人航具偵測水域環境整合構想示意圖
水域環境研究整合構想示意圖
技術‘二 污染氣味成分偵測分析
技術一 三棲航行監控
載具技術
技術四 汙染偵測路徑最佳化 技術‘三
雲端決策支援平台
長距離資 訊傳輸 偵蒐影像
及採樣
人工智慧 資訊 雲端資料
儲存
污染氣味 特徵
飛行路徑 最佳化
圖 28 智慧型三棲無人航具偵測系統架構
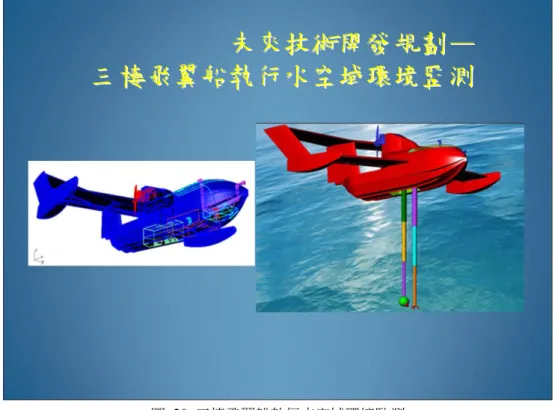
未來技術開發規劃 未來技術開發規劃 — — 三棲飛翼船執行水空域環境監測 三棲飛翼船執行水空域環境監測
圖 29 三棲飛翼船執行水空域環境監測
3.1 飛翼船技術開發
研製過程為經由初步設計分析後,進行氣動 力、水動力、結構體等各次系統研析,再進行飛翼 船本體製造,最後執行飛翼船水面與空中實際飛航 測試驗證;終於順利完成於水面起飛、地效航行、
爬升轉彎、空中盤旋等均有良好表現,不亞於一般 戰機性能。尤其,最後為能展示出連翼型機優異的 氣動力特色及靈敏的操控性能,執行保持原航行姿 態與高度下之轉彎與側向攀升等特色飛行技能,結 果亦表現如預期,顯示本研製成果已順利完成我國 B -type 飛翼船研發目標,其重要結果示如下圖 30- 圖 38。
圖 30 氣動流場模擬
圖 31 機身壓力分佈模擬
Wind Tunnel Test
圖 32 低速風洞
0度
圖 33 風洞實驗觀察不同攻角煙流分佈
圖 34 飛翼船水槽試驗數據分析
圖 35 水槽試驗感測系統
圖 36 應力分布圖(最大應力 67.8Mpa)
圖 37 變形分布圖(最大變形 2.4mm)
圖 38 連翼飛翼船在水面短場起降及原地側閃之高敏捷飛航測試動作
4.結論
本文針對我國首創完成之利用自製無人 飛航載具搭載臭氧、二氧化氮與 NMHC 偵測 儀器對大氣環境與污染物濃度分布進行立體 即時監測工作,未來亦將裝置懸浮微粒 PM2.5、
TVOC 等感測儀器(見圖 39),並結合資料整理 及地理資訊系統將所獲偵測濃度變化以三度 空間呈現,將更有利環境監測資料判讀分析。
另外亦利用新開發之無人飛翼船,規劃搭載 測污儀器及採樣設備結合雲端大數據資料處 理,此整合系統可大幅提升環境監測管控能 力,對水域污染或破壞事件做到先知快報的 防制功能。更進而可協助政府單位建立緊急
應變與即時決策機制(見圖 40)。
圖 39 UAV 可裝置 PM2.5 量測儀器進行懸浮微 粒分佈探測
緊急即時決策系統建立
小尺度氣象模組引進
污染源模組引進
監測偵照資料引進
核擴散模式引進
地理資訊系統引進
健康風險評估系統引進多模組結合與資料同化處理
架構緊急即時決策處理機制
圖 40 利用 UAV 多樣化環境汙染監測功能可架構出緊急決策系統
參考文獻
賈澤民,詹為淵,徐子圭,江志煌, 2013。
連翼構型飛翼船研製開發,航太年會 及學術論文研討會。
Corrigan, C., Measurements of Black Carbonand Ozone Using UAV. 5th Annual climate change.
Holland, G., Webster, P., Curry, J., Tyrell, G., Gauntlett, D., Brett, G., Becker, J., Hoag, R., and Vaglienti, W., 2001. The Aerosonde robotic aircraft: a new paradigm for environmental observations. Bull Am Meteorol Soc, 82(5):889–901.
Kroonenberg, A.V.D., Buschmann, T.M.M., Bange, J., and Vorsmann, P., 2008.
Measuring the Wind Vector Using the Autonomous Mini Aerial Vehicle M2AV.
American Meteorological Society, Journal of Atmospheric and Oceanic Technology, 25: 1969-1982.
Ramanathan, V., Ramana, M.V., Roberts, G., Kim, D., Corrigan, C., Chung, C., and Winker, D., 2007. Warming trends in Asia amplified by brown cloud solar absorption, Nature, 448(2): 575-579.
Stephens, G.L., Miller, S.D., Benedetti, A., McCoy, R.B., McCoy, R.F., Ellingson, R.G., Vitko, J., Boiton, W., Tooman, T.P.,
Valero, F.P.J., Minnis, P., Pilewskie, P., Phipps, G.S., Sekelsky, S., Carswell, J.R., Lederbuhr, A. and Bambha, R., 2000. The Department of Energy’s Atmospheric Radiation Measurement (ARM) Unmanned Aerospace Vehicle (UAV) Program. American Meteorological Society(Bulletin), 81:
2915-2938.
1Director of Green Technology Resench Center , Fooying University
Received Date: Dec 29, 2015
* Corresponding Author, E- mail: [email protected] Revised Date: Jul. 14, 2016 Accepted Date: Jul. 27, 2016
Monitoring of Environmental Pollutants by Using Unmanned Aerial Systems
Jir-Ming Char1*
Abstract
The objective of the present research is using Unmanned Aerial Vehicle System (UAVS) to probe the spatial and time variations of the pollutants in the air and water realm. In the air portion is to evaluate the performance of O3, NO2 and NMHC measurements using UAVs in Kaohsiung city. In the water portion, the pollutants discharged from factory waster water will be discussed. In this paper, a high-performance, long-endurance UAV system is developed to provide a platform for three-dimensional pollution measurement and monitoring requirements. The system includes carbon fiber composite airframe, GPS navigation, autopilot, RF data transmission and integrated air pollution sensing systems. The efficiency of each system are optimized and verified through numerical simulation or experiments, and interfaces between UAV and air pollution sensing systems are also considered to provide ideal air flow to the sensor under the extreme conditions at high altitude and high speed. Therefore, the UAV system can display air pollution measurement changes in real time and combine these results with GPS and geography data to monitor air quality in three dimension space. The air sensing results are compared with data from ground monitoring site. The result shows that the UAV system can offer real-time, 3-dimensional, and large area measuring results, which can obtain useful data for the government, industry, and research units. Also, when the water in our rivers, lakes, and oceans becomes polluted, the effects will be far reaching. It can endanger wildlife, make our drinking water unsafe. No doubt we need a more reliable tool to monitor the polluting water. Therefore a platform composed of the technologies of : Wing-In-Ground craft, the water-detecting sensors, the IT skill, and the cloud-computing service were bundled for this purpose . This platform can execute smart 3D UAV-based detecting technology of water pollution, and would be useful to make the coastal and river basin management more efficient.
Keywords:UAV, WIG craft, air quality monitoring, water pollution