Journal of Photogrammetry and Remote Sensing Volume 20, No.3, 2016, pp. 201-215
DOI:10.6574/JPRS.2016.20(3).4
1達雲科技有限公司 專案工程師 收到日期:民國 102 年 06 月 13 日
2達雲科技有限公司 總經理 修改日期:民國 103 年 05 月 02 日
3達雲科技有限公司 執行長 接受日期:民國 103 年 05 月 02 日
4成功大學水利及海洋工程學系 教授兼防災中心主任
5成功大學研究發展基金會 副研究員
6成功大學防災研究中心 規劃組組長
* 通訊作者, 電話:03-6589495 ext. 301, E-Mail:[email protected]
空載光達 DoD 與兩期雷射點分佈關係之探討
鐘郁翔
1*徐偉城
2劉進金
3謝正倫
4謝明霖
5陳俞旭
6摘 要
空載光達可有效的紀錄地貌特色,產生高精度之數值地形(DEM),故以 DoD 法(DEM of Difference) 進行地形變化分析,DoD 乃利用兩期高精度 DEM 相減後所得,是含高程差值之三維模型。此方法已經 是研究地貌演變、集水區土砂產生、以及崩塌地量體等一個重要的分析方法。唯 DoD 之不確定性並非全 區一致, LiDAR DEM 品質主要決定於 DEM 產製過程相關條件,因此 LiDAR DEM 成果的誤差在每一 個地點是不一樣。本研究之目的即在於探討光達點雲分佈不一致產生的 DoD 品質問題。
本研究以曾文水庫試驗區,利用 LiDAR(光達)於 2012 年 1 月與 2012 年 10 月所產製之兩時期 DEM 進行地形變化的土方不確定分析。結果顯示直接使用 DoD 推估地形變化土方計算,全區 DoD 之不確定 性等級最大的部分佔總面積 59.49%,不確定性等級最大的範圍內地面點數量是極少的。因此,直接使用 DoD 推估地形變化土方,其結果將包含極大的誤差值。為確保 LiDAR DEM 在應用分析上的正確性,須 對多時期 LiDAR 地面點進行 DoD 之分析評估。
關鍵詞:遙測、空載光達、高精度航測、侵蝕與淤積、防災
1. 前言
台灣地處菲律賓海板塊與歐亞板塊交界,地質 活躍,斷層多、地震多、岩層破碎,因此,山多而 平原少,潛藏許多地質不穩定區。在極端氣候變遷 影響下,強降雨引發山崩、地滑、土石流;同時,
引發強烈的土沙災害,大量土砂進入水庫,造成水 庫經營困境。因此,需要精確的地形資料,做為地 形變異分析之用,以應用於評估山崩之精確體積、
河道侵蝕與淤積量之估算、或相關之防災工程規劃 與設計使用。
空載光達以 GPS 與 IMU 整合之定位與定向系 統(positioning and orientation system,POS),配合高 脈衝頻率之雷射掃描系統,以及適當飛機載具,每
小時可獲取超過 100 平方公里之高密度與高精度 之三維點雲資料。目前,雷射脈衝率可達 500k Hz,
每個雷射點之高程精度可達公寸等級,因此,空載 光達可以提供產製大面積高精度之數值高程模型 (Digital Elevation Model, DEM),以進行防救災應 用。
使用傳統航測技術產製 DEM,在茂密森林覆 蓋區通常因為無法由立體對兩張照片同時看到地 面,所以無法直接量測到茂密森林覆蓋區之真實地 表高程;相對地,空載光達可藉由大量之雷射點穿 過茂盛樹木之細縫,測得森林實際之地面高程。因 此,利用高精度之 LiDAR DEM 進行地貌演變、集 水區土砂產生、以及崩塌地量體之分析是目前之趨 勢與潮流。
利用空載光達產製之兩期的精確數值高程模 型之差值,產製差分數值高程模型 DoD(DEM of Difference,DoD),作為三維量體的地形變化偵測 (Volumetric DEM of Difference, DoD)之依據,已經 成為多期光達變動地形分析的基本方法 (White, 2006; Martínez-Casasnovas et al., 2004; Wheaton et al., 2009; Brasington et al., 2003; Rumsby et al., 2008; Heritage et al., 2009)。
然而植物遮蔽造因素造成傳統 LiDAR 掃描地 面點不足,或所得之地面點只是較接近地面之雷射 點,其因為傳統的 Discrete LiDAR 最多只能接收回 訊夠強的四個 LiDAR 回波,對於植生覆蓋密集地 區較微弱之地面回波無法確實記錄,因此也無法獲 得真實之地面雷射點,導致 DoD 不確定性變差。
唯,DoD 並非全區具有一致的精度與不確定性,
因 此 , 使 用 者 必 須 充 分 了 解 此 不 確 定 性 (uncertainties)的特質,才能作正確的分析與研判。
換句話說,充分了解 DoD 不確定性的分佈,才能 避免作錯誤的分析與解讀。以河道地形演變及河道 沖蝕淤積分析為例,因為三維體積的變化可以藉由 兩期數值高程模型之差值來評估,所以 DoD 之不 確定性在空間與時間的分佈是我們能否正確研判 或偵測河道變異地點的先決條件。換句話說,最基 礎的問題是分辨 DoD 內的地形變遷與雜訊。因此,
基本挑戰是如何辨認 DoD 的不確定性,並且降低 不確定性對分析結果的影響(Joseph M. Wheaton et al., 2010; Wheaton JM., 2008; K. Kraus, 1998; L.
Allan James et al., 2012)。
本文研究區所在之曾文水庫集水區位於嘉義 與台南兩縣市,根據中央氣象局 2012 年 6 月份氣 候監測報告,指出阿里山、嘉義及台南氣象站本年 度梅雨季(5、6 月)所觀測到之累積降雨量分別為 2542.3 毫米、691 毫米與 1208 毫米。8 月期間影響 台灣之颱風有蘇拉颱風與天平颱風,8 月份阿里山、
嘉義及台南氣象站之累積降雨量分別為 998 毫米、
699.8 毫米與 635 毫米。
利用 2012 年 1 月(前期)與 2012 年 10 月(後期) 空載光達於曾文水庫集水區所掃描製作之兩期 DEM 進行 DoD 及其不確定性分析,包括討論(1)
直接利用 DoD 推估地形變化土方估算;(2)只採用 兩時期 DEM 裸露區域進行地形變化土方估算;(3) 兩期地面點與 DoD 之關係,討論不同時期 LiDAR DEM 之地面點受穿透率影響下之地形變化;(4)合 併兩期地面點,進一步探討地形變化量之不確定 性。
2. 兩期 LiDAR 基本資料分 析
本研究所採用之兩期 DEM 為水利署南水局
「曾文水庫集水區土地變異及土砂災害監測」計畫 ( 水 利署 南 區水 資 源 局 ,2010 & 2011) 所製作之 LiDAR DEM,前期 DEM 之空載光達掃瞄參數之 規劃以平均距地高(Average Ground Level, AGL)約 2100 公尺為準,40%重疊後之點雲密度約達每平方 公尺 3.7 點以上,航帶寬約 1700 公尺,為產製 1 米 DEM 所規畫之參數,其航線規畫圖如圖 1。後 期 DEM 之空載光達掃描參數之規劃以 AGL 為 2500 公尺為準,40%重疊後之點雲密度約達每平方 公尺 1.6 點以上,航帶寬約 1700 公尺,為產製 1 米 DEM 所規畫之參數,其航線規畫圖如圖 2。圖 1 及圖 2 所示,後期掃描航線數較前期航線數少是 後期之飛航規畫提高了雷射脈衝頻率(Laser Pulse Rate),提高了掃描效率。
圖 1 前期曾文水庫集水區航線規畫
圖 2 後期曾文水庫集水區航線規畫
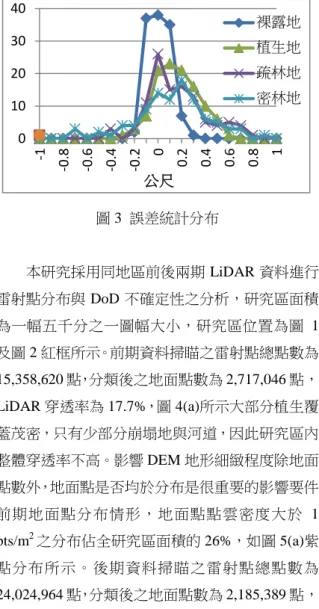
前期 DEM 整體掃描測量精度,利用地面測量 進行裸露地、植生地、疏林地及密林地 4 種地類,
每種類別各選取 30 個點,進行地面檢核,地面檢 核結果符合「LiDAR 測製數值高程模型及數值地 表模型標準作業程序(草案)」(內政部, 2005)所規 定之測量精度,檢測區誤差統計與誤差分佈如圖 3 與表 1 所示,而後期之 DEM,利用兩期掃描之點 雲進行不動點(建物屋頂與道路)檢核並確認兩期 點雲資料吻合。因此本研究所用之兩期 DEM 精度 符合規範要求,並且兩期點雲之不動點互相重疊無 平差與測量基準不同之問題。
表 1:檢測區之誤差統計結果
山區 裸露地 植生地 疏林地 密林地
Average dz(m) -0.035 0.106 0.106 0.064 Minimum dz(m) -0.207 -0.329 -0.497 -0.756 Maximum dz(m) 0.210 0.583 0.737 0.811
RMS(m) 0.101 0.204 0.264 0.307 STD(m) 0.095 0.175 0.243 0.302
圖 3 誤差統計分布
本研究採用同地區前後兩期 LiDAR 資料進行 雷射點分布與 DoD 不確定性之分析,研究區面積 為一幅五千分之一圖幅大小,研究區位置為圖 1 及圖 2 紅框所示。前期資料掃瞄之雷射點總點數為 15,358,620 點,分類後之地面點數為 2,717,046 點,
LiDAR 穿透率為 17.7%,圖 4(a)所示大部分植生覆 蓋茂密,只有少部分崩塌地與河道,因此研究區內 整體穿透率不高。影響 DEM 地形細緻程度除地面 點數外,地面點是否均於分布是很重要的影響要件。
前期地面點分布情形,地面點點雲密度大於 1 pts/m2之分布佔全研究區面積的 26%,如圖 5(a)紫 點分布所示。後期資料掃瞄之雷射點總點數為 24,024,964 點,分類後之地面點數為 2,185,389 點,
LiDAR 穿透率為 9.1%,圖 4(b)所示大部分植生覆 蓋茂密,只有少部分崩塌地與河道,因此穿透率不 高。後期地面點分布情形,地面點點雲密度大於 1 pts/m2之分布佔全研究區面積的 28.6%,如圖 5(b) 紫點分布。由圖 5 可知前後兩期掃描,研究區地面 點分布集中於裸露地,林區內之地面點較為稀疏。
點雲之地面點數量不足,導致地表高程資訊不足,
所建立之 DEM 無法精確且毫無遺漏的描述地形特 徵。因此將兩期 DEM 進行 DoD 分析時,地面點 分布稀疏的區域所獲得之地形變化量,其不確定性 便可能提高。
因此,利用 LiDAR DEM 進行 DoD 分析時,
需探討兩期地面點之分布,以了解 DoD 之不確定 性分布。圖 6 僅為合併兩期地面點之分析,兩期皆 有地面點網格佔全區面積的 18.5%,且集中於裸露
0 10 20 30 40
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
公尺
裸露地 植生地 疏林地 密林地
地(圖 6 褐色所示),只有一期有地面點網格佔 全區面積的 17.6%(圖 6 淡綠色所示),兩期皆無地 面點網格佔全區面積的 63.9%,多分布於山坡林區 (圖 6 紅色所示)。
(a)前期正射影像 (b)後期正射影像 圖 4 兩期正射影像
(a)前期地面點分布 (b)後期地面點分布 (紫點) (紫點)
圖 5 兩期地面點分布
圖 6 合併兩期地面點分布
3. 兩期 DOD 分析
空載光達的發展,實現了直接由空中穿透森林 測量精確的三維地形,利用空載光達的此優勢,可 以量測前後期 LiDAR DEM 地形變化的正確體積,
使用前後期 DEM 進行地形變化分析,須注意前後 期 DEM 相減後所造成的不確定性來源。
造成 DoD 不確定性主要來源有:(1)、產製來 源不同,(2)、測量基準不同,(3)、 解析度不同,
(4)、內插方式不同,(5)不確定性之空間分布。
(1)產製來源不同:使用 LiDAR、InSAR 或航 測所產製之 DEM 進行 DoD 分析,首先須了解各 系統本身產製 DEM 的特性與誤差來源。例如:傳 統航測也可以產製山崩事件前後之 DEM,然而航 測立體模型誤差約 1 m,立體模型測量誤差約 2 m,
人員判斷森林樹木高度之誤差約 4 m~ 5 m(Wang et al., 2002; 蘇苗彬等,2009)。而 LiDAR 所產製之 DEM 在森林地區之誤差為公寸等級,因此將不同 系統產製之 DEM 進行 DoD 分析,其分析成果會 具 有 很 大 的 不 確 定 性 。 本 文 所 採 用 資 料 均 為 LiDAR 產製之 DEM,LiDAR 產製之 DEM 有一特 別的產製來源誤差,即為點雲編輯誤差,尤其在森 林地區點雲分類編輯誤差確實為不確定性來源之 一,本研究區經重複檢核已將點雲分類誤差降至最 低。
(2)測量基準不同:空載光達掃描之點雲三維 坐標,乃利用地面 GPS 固定站做為參考站,以動 態差分定位進行 GPS 軌跡解算,進而獲得點雲三 維資料。因此,解算時所採用的大地坐標系統不同,
會獲得不同點雲的三維資料,若兩次光達掃描所利 用的基準不一樣,則所產生的兩期 DEM 相減之差 異值必定受到基準不同的影響。
因此,在進行 DoD 分析之前,必須針對兩期 之空載光達所採用的大地基準加以瞭解,並且對兩 期成果作必要的調整或轉換,以期將基準不同的影 響減至最少。
(3)解析度不同:不同解析度之前後期 DEM 進 行地形變化分析,由於 DEM 解析度大小不同,所 獲得之成果會包含錯誤資訊。
(4)內插方式不同:LiDAR 點雲經由不同內插 之演算法,描述出不同的 DEM 地形,因此在相同 位置,使用不同的內插方式,可能會獲得不同之地 形表面。因此,進行的 DoD 分析時,前後期點雲 必須使用相同之內插方式,降低不確定之誤差。
(5)不確定性之空間分布:由於空間上,地表 之覆蓋物是隨機的、是非均值的,因此不同土地條 件,其不確定性將會不同。
本實驗利用同一區域,兩期 LiDAR 掃描之資 料,進行 DoD 分析,分別將兩期點雲利用 Inpho Scop++內插為 1 米解析度之 DEM,內插方式為最 似 內 插 法 (adaptable prediction) , 測 量 基 準 採 用 TWD97。
將此區後期 DEM 減前期 DEM 成果如圖 7,
由表 2 可知本研究區兩期 DEM 差值高程變化區間 在-1.99~2 公尺佔了總面積的 91.84%,這些變化區 多位於植生茂密地區。高程變化在-2~-20.55 佔了 總面積的 5.85%,高程變化在 2.01~15 佔了總面積 的 2.29%。在林木覆蓋未變動區之兩期地形差異值 常有較大的變化(劉進金等,2011),因此林區 DoD 的不確定性大,在此獨立分析一個發生崩塌事件實 驗樣區之 DoD 分析。
圖 7 兩期高程變化圖
表 2 研究區 DoD 統計表
本文於研究區中找一崩塌地作為實驗區,如圖 7 黃框所示為崩塌試驗樣區之分布位置。圖 8 紅框 區塊為進行 DOD 之範圍,DoD 成果如圖所示。由 圖 9 直方圖可看出此實驗區崩塌之面積遠大於堆 積之面積。在此個別檢視此區之崩塌面積與堆積面 積,由表 3 可知,此區堆積高程變化最多的區間在 0.5~5 公尺面積為 18486 平方公尺,佔堆積總面積 的 83.8%,其次之高程變化區間為 5.01~10 公尺,
其面積為 2583 平方公尺,佔堆積總面積的 11.7%。
根據經濟部中央地質調查所對於深層崩塌之 定義(地調所,2008),滑移面之深度大於 5~10 公 尺,由表 4,崩塌試驗樣區 DoD 崩塌統計表可知,
此實驗區之深層崩塌面積為 20540 平方公尺,佔總 崩塌面積的 13.54%,淺層崩塌面積為 131176 平方 公尺,佔總崩塌面積的 86.46%。
圖 8 崩塌試驗樣區,兩期高程變化圖
圖 9 崩塌試驗樣區 DoD 分析直方圖
表 3 崩塌試驗樣區 DoD 堆積統計表
表 4 崩塌試驗樣區 DoD 崩塌統計表
理論上,植被覆蓋茂盛之地形未變動區之兩 期 DEM 差值應該趨近於零,但由圖 7 與表 2 知本 研究區兩期 DEM 差值高程變化區間在-1.99~2 公 尺佔了總面積的 91.84%。於植被茂密區,空載光 達理論上有機會可穿植被間之空隙,測得實際之地 表高程,但實際上植被覆蓋情形各有不同,且 Discrete LiDAR 掃描所得之雷射點僅僅是較強的 四個 LiDAR 雷射回訊,所得之地面點可能只是打 在較接近地表的植被上,而非真實之地面點,接近 地面或反射能量微弱的雷射回訊是不會被 Discrete LiDAR 所記錄。因此,於植披茂盛地形未變動區 之 DoD 高程變化區間在-1.99~2 公尺,是因為進行 兩次 LiDAR 掃描所獲得之地面點未必一樣,進而 兩期未變動區地面點內插所得之高精度地形表面 成果會不同,導致進行 DoD 分析時,植生茂密區 高成差值有-1.99~2 公尺之落差,在此進一步探討 雷射點分布與 DoD 之關係。
4. 雷射點分布與 DoD 分析
為探討兩期 LiDAR 雷射點分布與 DoD 之關係,
前期之掃描資料與後期之掃描資料,將雷射點區分 為三種情況:1、同一網格內兩期皆有地面點,2、
同一網格內只有一期有地面點,3、同一網格內兩 期皆無地面點,並經此三種地面點分布情況與 DoD 差值進行分析,分析 DoD 不確定性之原因。
4.1 同一網格內兩期皆有地面點 與 DoD 之關係:
圖 10 中黑點為合併前後兩期地面點後,兩期 均有地面點之分布位置,兩期均有地面點之面積為 1313285 平方公尺,占總面積的 18.5%。圖 8 之底 色為 DoD 之高差變化,配合兩期地面點分布可分 為兩種情況:I、地形未改變,II、地形發生變化。
圖 10 兩期皆有地面點與 DoD 分布關係
I.地形未改變:
圖 11 為同一網格內兩期皆有地面點且地形無 變化之點雲剖面,其中圖 11A 為地面點分布與 DoD 之關係,圖 11B 為後期之正射影像,圖 11C 為後 期之地面點,圖 11D 中白色點為前期之點雲,其 餘為後期之點雲。此地表特性屬於裸露地,前後兩
期雷射點直接打在地表上且兩期點雲無明顯高差 (圖 11D),因此兩期 DoD 差值為趨近於零。
圖 11 兩期皆有地面點地形無變化點雲剖面
II.地形發生變化:
圖 12 為同一網格內兩期皆有地面點且地形有 變化之點雲剖面,其中圖 12A 為地面點分布與 DoD 之關係,圖 12B 為後期之正射影像,圖 12C 為後 期之地面點,圖 12D,中白色點為前期之點雲,其
餘為後期之點雲。由於此變化區位於河道,地表特 性屬於裸露地,兩期雷射點直接打在地表,因地形 變化,相同位置兩期地面點具有高差(圖 12D),因 此,兩期 DoD 差值反應之高差與兩期地面點所反 應之高差是一致的。
圖 12 兩期皆有地面點地形有變化點雲剖面
4.2 同一網格內只有一期有地面 點與 DoD 之關係:
DoD 圖 13 中黑點為合併前後兩期地面點後,
只有一期有地面點之分布位置,只有一期有地面點 之面積為 1251300 平方公尺,占總面積的 17.6%。
圖 13 之底色為 DoD 之高差變化,配合兩期地面點 分布可分為兩種情況:I、地形無變化,II、內插造 成差異。
圖 13 只有一期有地面點與 DoD 之分布關係
I.地形無變化:
圖 14 為同一網格內只有一期有地面點且地形 無變化之點雲剖面,其中圖 14A 為地面點分布與 DoD 之關係,圖 14B 為後期之正射影像,圖 14C 終橘點為後期之地面點,圖 14D 中白色點為前期 之點雲,白點之最低點為前期地面點,其餘之藍點 為後期點雲,藍點之最低點為後期點雲。此案例剛 好是地形坡度緩和,即使一小段距離內只有一期地 面點,相鄰地面點經過內插亦可獲得相似之地表 面 ,因此兩期 DEM 之地形差值極小。
圖 14 只有一期有點地形無變化點雲剖面
II.內插造成之差異:
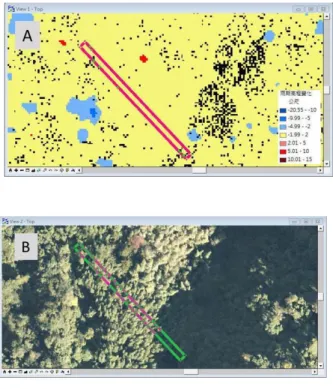
圖 15 為同一網格內只有一期有地面點且地形 有變化之點雲剖面,其中圖 15A 為地面點分布與 DoD 之關係,圖 15B 為後期之正射影像,圖 15C 橘點為後期之地面點,圖 15D 中白色點為前期之 點雲,白點之最低點為前期地面點,其餘為後期之 點雲。此地區為林區, DoD 最大差值約 12 公尺。
這是由於此案例前期點雲在地形變化處只有兩個 地面點,而後期獲得較多之地面點,得以較為完整
描述地形,因此兩期地面點內差時出現不同之地形 面,如圖 15C 所示,因此 DoD 出現差值。
圖 15 一期有點地形有變化點雲剖面
4.3 同一網格內兩期皆無地面點 與 DoD 之關係:
DoD 圖 16 中黑點為合併前後兩期資料後,兩 期均無地面點之分布位置,兩期皆無地面點之面積 為 4,534,295 平方公尺,占總面積的 63.9%。圖 16 之底色為 DoD 之高差變化,配合兩期地面點分布 可分為兩種情況:I、密林區無法穿透或無回訊,
II 水體無反射。
圖 16 兩期皆無地面點與 DoD 之分布關係
I.密林區無法穿透或無回訊:
圖 17 為同一網格內均無地面點且地形無變化 之點雲剖面,其中圖 17A 為地面點分布與 DoD 之 關係,圖 17B 為後期之正射影像,圖 17C 橘點為 後期之地面點,圖 17D 中白色點為前期之點雲,
白點之最低點為前期地面點,其餘為後期之點雲。
此地區為密林區,穿透率極差或者 LiDAR 雷射抵 達地面後,因森林地區地表土壤潮濕,導致雷射能 量不足,無法讓 LiDAR 接收器所記錄,造成此區 兩期均無地面點,因此 DoD 差值趨近於零。
圖 17 期均無地面點地形無變化點雲剖面
II.水體或潮濕地表無反射:
圖 18 為同一網格內均無地面點河道之點雲剖 面,其中圖 18A 為地面點分布與 DoD 之關係,圖 18B 為後期之正射影像,圖 18C 為後期之地面點,
圖 18D 中白色點為前期之地面點,其餘為後期之 地面點。此地區為河道,而 LIDAR 之雷射訊號為
近紅外光波段,雷射打在水面,能量被水吸收,可 能不會有反射訊號,故此案例中河道區域無點雲分 布。
圖 18 兩期均無地面點河道點雲剖面
由上述幾個例子,利用前後兩期 LiDAR 地面 點配合 DoD 進行不確定性分布之分析,LiDAR 點 雲受地形地物影響,如:植被或地表濕度,因此做 為 DEM 內插用之地面點分布亦受其影響。而各時
期植被之遮蔽或地表濕度不同,直接影響各時期 LiDAR 掃描所產製之地面點分布,因此兩時期內 插之 DEM 必然有異。進行 DoD 分析時,可利用 兩時期之 LiDAR 地面點進行不確定性之分析。
5. DoD 不確定性分布
上述各例子,看似皆因穿透率造成,而「LiDAR 測製數值高程模型及數值地表模型標準作業程序 (草案)」針對穿透率之說明僅用於解釋植被覆蓋之
程度。其文中說明如下:地表植被覆蓋情形,可由 實際完成掃描之點雲數據,去除雲層、低點或其他 錯誤點,經地面點分類過濾後之穿透率求得,即:
穿透率=地面總點數÷所有點總數 植被覆蓋率= 1 −穿透率
由上述說明,「LiDAR 測製數值高程模型及數 值地表模型標準作業程序(草案)」乃認為穿透率僅 由植被覆蓋所影響,而植被覆蓋僅是影響 DoD 地 其中一個因素。
對 LiDAR 掃描作業而言即使掃描同一地點,
地表覆蓋物、地表濕度、植被高度….等等不同自 然地表條件,均會獲得不同之地面點分布。如:傳 統的 Discrete LiDAR 對於植被遮蔽容易獲得非地 面點之點雲,而地表潮濕或者水體會吸收 LiDAR 雷射能量,可能導致無 LiDAR 回訊,因此地面點 之分布位置受不確定之空間分布影響, 如下列公 式所示:
地面點數= 總點雲數 × g
其中,g 為地面覆蓋物、地表濕度、植被高度等之 函數。
又因,本文之航線規 劃 根 據 點 雲 密 度 至 少 1pts/m2進行掃描規劃,為獲得最佳總點雲數,“掃 瞄參數”均已按照地形、航高與航速...等等條件進 行掃描規劃。最佳化後之成果,獲得之點雲密度均
大於 1pts/m2,因此未將“掃瞄參數”做為考量,
如以不同來源之 LiDAR 資料進行分析,則需考慮
“掃瞄參數”。
而地面覆蓋物、地表濕度、植被高度等等函數,
即為影響地面點雲之不確定性
,
因此,利用多期 LiDAR DEM 進行 DoD 分析時,DoD 不確定性便 因歷次掃描之地面點分布不同被表現出來,因此 DoD 不確定性之分析須將兩期點雲合併一起分析,DoD 不確定性以下公式表示:
DoD 不確定性 =兩期地面點總數 兩期總點雲數
LiDAR DEM 之精度取決於地面點雲數量,地 面點雲數量受不確定之空間分布影響,因此,本研 究合併前後期點雲,進行 DoD 不確定性之分析。
本文合併兩期點雲,並計算出研究區之不確定性,
將計算所得之成果等分為四等分,如表 5 所示,
DoD 不確定性等級低代表地面點數多,其內插所 得之 DEM 精度較相對也會較佳,因此以可利用 DoD 不確定性分析作為地形變化分析之參考指 標。
表 5 DoD 不確定性數值意涵
不確定性 不確定性 等級
代表涵義
0~0.25 等級四 可能兩期掃描皆 無地面點,或某一
期只有極少量之 地面點 0.251~0.50 等級三 可能一期掃描有
地面點,一期無地 面點 0.51~0.75 等級二 可能兩期皆有較
為稀疏之地面點 0.751~1 等級一 兩期皆有均勻分
布之地面點
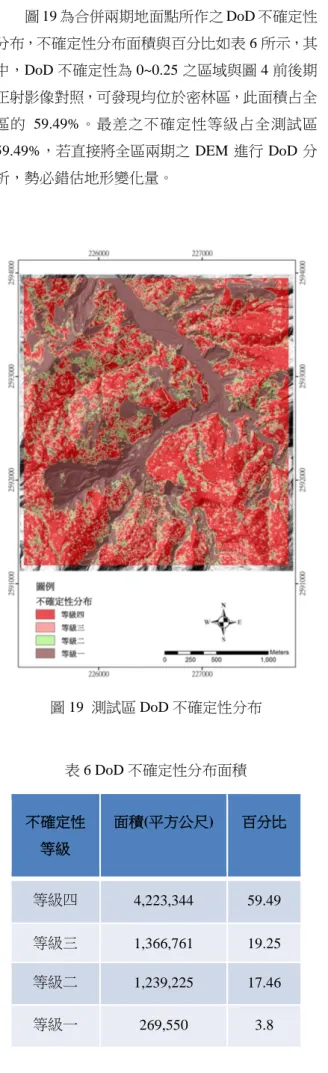
圖 19 為合併兩期地面點所作之 DoD 不確定性 分布,不確定性分布面積與百分比如表 6 所示,其 中,DoD 不確定性為 0~0.25 之區域與圖 4 前後期 正射影像對照,可發現均位於密林區,此面積占全 區的 59.49%。最差之不確定性等級占全測試區 59.49%,若直接將全區兩期之 DEM 進行 DoD 分 析,勢必錯估地形變化量。
圖 19 測試區 DoD 不確定性分布
表 6 DoD 不確定性分布面積
不確定性 等級
面積(平方公尺) 百分比
等級四 4,223,344 59.49
等級三 1,366,761 19.25 等級二 1,239,225 17.46
等級一 269,550 3.8
由於全測區進行 DoD 分析,地形變化量會被 錯估,因此本文獨立探討一個發生崩塌之實驗區 DoD 成果。
如圖 20 內之紅色線條圍成之區域即為崩塌試 驗樣區範圍,此區之崩塌與堆積數據分析如前所述,
在此不再贅述。表 7 為崩塌試驗樣區之不確定性分 析,此區域不確定性等級最高的面積僅占此區面積 之 5.55%,因此,此發生崩塌現象之實驗區地形變 化量是可靠的。
圖 20 崩塌試驗樣區 DoD 不確定性分布
表 7 崩塌試驗樣區 DoD 不確定性分布面積 不確定性
等級
面積(平方公尺) 百分比
等級四 20,290 5.55 等級三 56,519 15.46
等級二 204,030 55.81 等級一 84,741 23.18
由此案例,森林等可能影響 LiDAR 地面點之 區域進行 DoD 分析,如直接使用前後兩時期之 DEM 之差值,勢必錯估地形變化量,而應先圈繪 出發生崩塌與堆積之區域,並且利用兩期地面點進 行 DOD 不確定性分布之分析,進而作全區域之地 形變化之估算,方可正確估算出兩期 LiDAR 掃描 區之地形變化量。
6. 結論
除用空載光達產製 DEM 外,也可以使用歷史 航照立體對產製 DEM,因此,兩期 DEM 的時間 間隔可以延伸至數十年,甚至於超過半世紀。這對 於利用 DoD 進行地形地貌變化分析成為有利工具。
技術上主要的挑戰便是如何精確產製 DEM,並且 辨 識 與 降 低 不 確 定 性 (Hodgson and Alexander, 1990)。
同測區內由於地表覆蓋物之條件每時期皆有 變化,因此空載光達所發射之雷射點所接觸之地點 亦有所不同,因此內插時所產生之 DEM 會有所差 異,利用多時期之 LiDAR DEM 進行地形變異分析,
需進行不確定性之評估。
本研究結果直接使用 DoD 推估地形變化土方 計算,DEM 差值高程變化區間在-1.99~2 公尺佔了 總面積的 91.84%,高程變化在-2~-20.55 公尺佔了 總面積的 5.85%,高程變化在 2.01~15 公尺佔了總 面積的 2.29%,然配合兩期地面點進行 DoD 不確 定分析,全區 DoD 不確定性等級最大(等級四)的 部分佔了總面積的百分之 59.49,因此直接使用 DoD 推估地形變化土方計算,其土方估算量將包 含極大的誤差值。
而只採用兩時期 DEM 裸露區域進行地形變化 土方估算,滑移面之深度大於 5~10 公尺之深層崩 塌面積,佔總崩塌面積的 13.54%,滑移面之深度 介於 0.5~4.99 公尺的淺層崩塌面積,佔總崩塌面積 的 86.46%。配合兩期地面點進行 DoD 不確定分析,
DoD 之不確定性等級最大(等級四)的部分僅佔了 總面積的百分之 5.55。
直接使用 DoD 推估地形變化土方計算,其結
果不確定性等級較高,是因為測試區中,真實地形 受植被緊密覆蓋, LiDAR 在森林進行掃描時,雷 射點不一定每次都有效穿透森林到達地面,獲取真 實之地表三維資料,有時許多雷射點只打相對低點 的位置如:樹幹或森林中較厚的腐植層,因此利用 各時期 LiDAR DEM 進行 DoD 土方計算時,森林 地區的土方量估算容易充滿誤差,因此需進行不確 定性評估。
由於植物遮蔽造成傳統 LiDAR 掃描地面點不 足,是因為傳統的 Discrete LiDAR 最多只能接收回 訊夠強的四個 LiDAR 回波,對於植生覆蓋密集地 區較微弱之地面回波無法確實記錄。未來可利用全 波形點雲萃取及處理技術,進行全波形之光達掃描,
並進行回波訊號之萃取,及完整之全波形點雲處理 與 DEM 產製,可以有效獲取較微弱回波之地面點,
增加地面點之數量。
致謝
本文使用之兩期 LiDAR DEM 與正射影像引 用自水利署南區水資源局與成大防災中心「曾文水 庫集水區土地變異及土砂災害監測」計畫之成果報 告,作者有機會參與計畫相關分析,特誌謝忱。
參考文獻
內政部,2005。LiDAR 測製數值高程模型及數值 地表模型標準作業程序(草案)。台北。
交通部中央氣象局,2013。氣候監測報告,第五十 二期,台北。
經濟部水利署南部水資源局,2012。曾文水庫集水 區土地變異及土砂災害監測總報告,高雄。
經濟部中央地質調查所,2008。地質敏感區災害潛 勢評估與監測-重大山崩災害潛勢地區災害 模擬與監測(1/4)期末報告,台北。
劉進金,曾志民,林慶偉,陳振宇,伊孝元,2011。
空載光達技術於大區域坡度災害調查與分析
之應用。地工技術,第 129 期,第 35-44 頁。
蘇苗彬,陳毅輝,詹景丞,2009。應用數值航空攝 影測量於地形高程與地表特徵變異之評估。
2009流域地質與坡地災害研討會,中央質調 查所主辦,台灣台北。
Allan, J., Michael, E., Hodgson, Subhajit, G., and Mary, M., 2010. DEM of Difference using historic maps and DEM differencing: The temporal dimension of geospatial analysis, Latiolais Geomorphology, Vol. 137, No. 1. (2012): 181-198, doi:10.1016/j.geomorph.2010.10.039 Key:
citeulike:11096353.
Brasington, J., Langham, J., and Rumsby, B., 2003.
Methodological sensitivity of morphometric estimates of coarse fluvial sediment transport.
Geomorphology 53, 299–316.
Heritage, G.L., Milan, D.J., Large, A.R.G., and Fuller, I.C., 2009. Influence of survey strategy and interpolation model on DEM quality.
Geomorphology 112, 334–344.
Hodgson, M.E., and Alexander, B.E., 1990. Use of historic maps in GIS analyses, ACSM Tech.
Papers, 1990 ASPRS-ACSM Annual Convention, 3, pp. 109–116.
Joseph, M.W., James, B., Stephen, E.D., and David A.S., 2010. Accounting for uncertainty in DEMs from repeat topographic surveys: improved sediment budgets, Sear Earth Surface Processes and Landforms 35(2): 136–156, February 2010.
Martínez-Casasnovas, J.A., Ramos,M.C., and Poesen, J., 2004. Assessment of sidewall erosion in large gullies using multi-temporal DEMs and logistic regression analysis. Geomorphology 58, 305–321.
Kraus, K., and Pfeifer, N., 1998 , Determination of terrain models in wooded areas with airborne laser scanner data, Institute of Photogrammetry and Remote Sensing, Vienna University of Technology, Gusshausstr. 27–29, 1040 Vienna, Austria. ISPRS Journal of Photogrammetry and Remote Sensing, DOI:10.1016/S0924-2716(98)00009-4
pp.193-203.
Rumsby, B.T., Brasington, J., Langham, J.A., McLelland, S.J., Middeton, R., and Rollinson, G., 2008. Monitoring and modelling particle and reach-scale morphological change in gravel-bed rivers: applications and challenges.
Geomorphology 93, 40–54.
Wheaton, J.M., 2008. Uncertainty in Morphological Sediment Budgeting of Rivers, Unpublished PhD Thesis, University of Southampton, Southampton, 412 pp.
White, R., 2006. Pattern based map comparisons.
Journal of Geographic Systems 8, 145–164.
1 Engineer, IDAR Technology Co., Ltd., Zhubei City 30264, Taiwan. Received Date: Jun. 13, 2013
2 Ph.D. Candidate, Civil Engineering Department, National Chiao-Tung University and GM, Revised Date: May 02, 2014 LIDAR Technology Co., Ltd., Zhubei City 30264, Taiwan. Accepted Date: May 02, 2014
3 CEO, LIDAR Technology Co., Ltd., Zhubei City 30264, Taiwan.
4 Professor, Department of Hydraulic and Ocean Engineering and Director, Disaster Prevention Research Center, National Cheng Kung University.
5 Associate Researcher, Disaster Prevention Research Center, NCKU
6 Chief, Planning Division, Disaster Prevention Research Center, NCKU
* Corresponding Author, Phone: 0937-268764, E-mail: [email protected]
A Study on the Relationship between DoD and Distribution of LiDAR Point Clouds
Yu-Shiang Chung1* Wei-Cheng Hsu2 Jin-King Liu3 Chjeng-Lun Shieh4 Ming-Lin Shieh5 Yu-Shiu Chen6
ABSTRACT
Airborne LiDAR is an effective tool for recording details of landscape and producing high-resolution digital elevation models (DEM). Therefore, DoD (DEM of Difference) method a straight-forward method for conducting volumetric change of two different time with multitemporal DEMs. And, DoD becomes a basic tool for the analyses of landscape change, erosion and sedimentation, volume of landslides, and others.
Nevertheless, the accuracy or quality of a DoD cannot remain the same for every grid pixels. For effective application, the main challenge is to understand and suppress the uncertainties caused by this quality problem.
The purpose of this study is to explore the uncertainties caused by un-even distribution of point clouds and thus to propose a method using ground points to assess the uncertainties of DoD.
The study area is located in Tseng-Wen Watershed of southern Taiwan. Two Airborne LiDAR surveys were conducted in January and October of 2012, respectively. The results show that 59.49% of the area of a DoD is under high uncertainties within which the number of ground points of a grid cell is low. High uncertainties and high risk can take place if volumetric measures are taken from these areas. An alternative approach for suppress the uncertainties is to apply a stencil of polygons generated from manual edited bare lands. Consequently, only 5.55% of the area of a DoD is under high uncertainties. It is concluded that using ground points of multi-temporal LiDAR survey, uncertainty can be effectively assessed to assure the quality of LiDAR DEMs and applications.
Key Words: remote sensing, airborne LiDAR, high resolution photogrammetry, natural disaster, sedimentation