國 立 交
通
大
學
土木工程學系
碩士論文
三維雷射掃瞄儀目標物顏色因子對於反射強度及精度
影響之研究-以 Trimble GS200 為例
研究生:李宗儒
指導教授:陳春盛
中華民國九十六年七月
三維雷射掃瞄儀目標物顏色因子對於反射強度及精度影響之
研究-以 Trimble GS200 為例
A Study on the Effect of Reflective Intensity and Precision on 3D Laser Scanner Target's Color Factor-A Case of Trimble GS200
研 究 生:李宗儒
Student:Tzung-Ju,Li
指導教授:陳春盛
Advisor:Dr. Chun-Sung Chen
國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Civil Engineering July 2007
Hsinchu, Taiwan, Republic of China
中華民國九十六年七月
三維雷射掃瞄儀目標物顏色因子對反射強度及精度影響之研究 -以 Trimble GS200 為例 學生:李宗儒 指導教授:陳春盛 博士 國立交通大學土木工程研究所碩士班
中文摘要
經三維雷射掃瞄儀掃瞄作業後所得到之眾多三維空間坐標一般以”點雲”稱 之,點雲資料的優劣影響著後續的內業處理與成果分析。以點雲獲取而言,三維 雷射掃瞄儀掃瞄的原理是應用接收雷射反射訊號的時間差,來得到各點位的三維 空間坐標,但反射強度與精度的關係並非反射強度值越高則精度越好。本研究將 探討在掃瞄不同顏色之目標物時,將所得到的點雲分布、反射強度值和色階值 (RGB)進行分析,研究這些因子的相關性,瞭解目標物顏色因子對反射強度及精 度影響之研究,並提出相關研究成果。 本研究擬以 Trimble Mensi GS200 型三維雷射掃瞄儀掃瞄儀,利用掃瞄自製 目標物所得點雲進行分析,先探討目標物在不同色階下,其強度值的差異,再分 析強度值對精度的影響,利用上述兩步驟,以找出色階值與強度值對精度的影響。 經實驗後可得各種顏色目標物強度值趨近常態分佈,其中亮色系顏色具有 較佳的反射強度,但強度值分佈較離散;反之暗色系強度值較小,強度值分佈較 集中。此外點雲資料並非強度值越高其精度越高,將精度朝兩方向探討:精密度 與精確度,在強度值 41~140 間點雲資料精密度最佳,而點雲精確度而言則在強 度值 141~200 間最佳,但兩種精度指標皆在強反射範圍呈震盪現象,進而影響整 體之精度。A Study on the Effect of Reflective Intensity and Precision on 3D Laser Scanner Target's Color Factor-A Case of Trimble GS200
Student:Tzung-Ju Li Advisor:Dr. Chun-Sung Chen
Department of Civil Engineering National Chiao Tung University
Abstract
The numerous three-dimensional space coordinates received generally call it with " point clouds " after scan the object which use 3D laser scanner. But the quality of point cloud is influencing the follow-up analysis. There are close relations between the precision of point clouds and intensity of reflecting. So in this research, different scanning colors of the object are considered to analyze the point cloud distribution and density, the noise and the reflective intensity. Using the analyzed results, the reflective intensity, and the object’s RGB of the foregoing factors are presented.
In this research, Trimble GS200 type 3D laser scanner is selected to scan the object. And using the observations, the influence from the scanning intensity and RGB of the object are analyzed. From the analyzed results, a promoting method is presented for 3D laser scanner scanning and point cloud information analysis.
目錄
中文摘要...I ABSTRACT... II 目錄...III 圖目錄... V 表目錄... VII 第一章 前言...1 1-1 研究之動機與目的...1 1-2 研究流程...3 1-3 文獻回顧...5 1-4 論文架構...7 第二章 理論基礎與研究方法...8 2-1 顏色的組成和目標物材質的選擇...8 2-1-1 目標物顏色的選擇 ...8 2-1-2 目標物材質的選擇 ...10 2-2 最小二乘最適平面...13 2-2-1 空間中平面方程式 ...13 2-2-2 最小二乘最適平面 ...14 2-3 三維雷射掃瞄儀系統...18 2-3-1 三維雷射掃瞄儀之介紹 ...18 2-3-2 三維雷射掃瞄儀之特性 ...19 2-1-3 三維雷射掃瞄儀量測原理 ...222-1-4 座標轉換 ...25 2-1-5 三維雷射掃瞄儀誤差來源 ...26 第三章 目標物顏色因子與反射強度關係之研究...28 3-1 實驗掃瞄工作規劃...28 3-2 使用儀器、軟體說明...30 3-3 實驗資料與實驗設計...32 3-3-1 實驗資料 ...32 3-3-1-1 內業資料處理流程...33 3-3-2 實驗設計 ...36 3-4 目標物顏色因子與反射強度之關係...39 第四章 反射強度值對精度影響分析...53 4-1 實驗資料與實驗設計...53 4-1-1 實驗資料 ...53 4-1-2 實驗設計 ...53 4-2 單次最適平面計算...56 4-3 點雲與 TARGET平面距離 ...65 4-4 影響因子之關係...76 第五章 結論與建議...80 參考文獻...81
圖目錄
圖 1-1、研究流程圖 ...4 圖 2-1、強反射反應圖 ...10 圖 2-2、三維雷射掃瞄儀與物體間相對坐標系示意圖 ...19 圖 2-3、三角法:單相機法(修改自 Boehler,2001)...23 圖 2-4、三角法:雙相機法(修改自 Boehler,2001)...23 圖 2-5、時間差量測法示意圖(修改自 Boehler,2001)...24 圖 2-6、掃瞄儀坐標系與物空間坐標系之關係圖 ...25 圖 3-1、外業掃瞄流程圖 ...29 圖 3-2、Trimble GS200 型三維雷射掃瞄儀距離與掃瞄精度關係圖 ...31 圖 3-3、點雲分類程式 ...31圖 3-4、點雲資料匯入 Mircosoft Office Access ...32
圖 3-5、點雲初步分割 ...33 圖 3-6、控制覘標 ...34 圖 3-7、內業處理點雲流程圖 ...35 圖 3-8、實驗場目標物與儀器擺放示意圖 ...36 圖 3-9、實驗場目標物與儀器擺放位置圖 ...37 圖 3-10、目標物與覘標佈設圖 ...37 圖 3-11、掃瞄之點雲成果圖 ...38 圖 3-12、Photoshop 檢色器與相機顏色比較(紅色)...40 圖 3-12、紅色目標物強度值分布直方圖 ...41 圖 3-13、Photoshop 檢色器與相機顏色比較(綠色)...42 圖 3-14、綠色目標物強度值分布直方圖 ...43 圖 3-15、Photoshop 檢色器與相機顏色比較(藍色)...44 圖 3-16、藍色目標物強度值分布直方圖 ...45
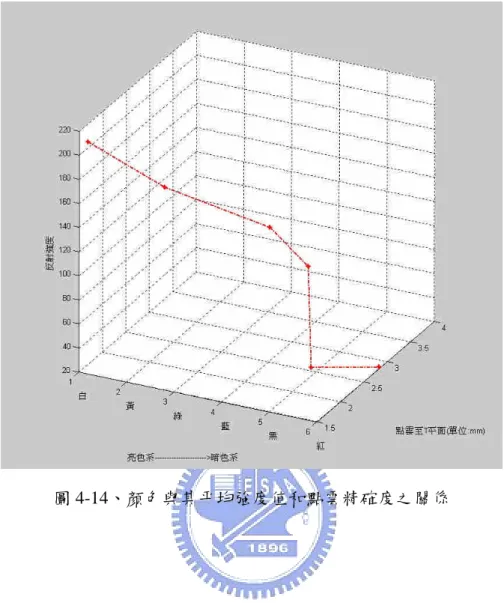
圖 3-17、Photoshop 檢色器與相機顏色比較(黃色)...46 圖 3-18、黃色目標物強度值分布直方圖 ...47 圖 3-19、Photoshop 檢色器與相機顏色比較(白色)...48 圖 3-20、白色目標物強度值分布直方圖 ...49 圖 3-21、Photoshop 檢色器與相機顏色比較(黑色)...50 圖 3-22、黑色目標物強度值分布直方圖 ...51 圖 4-1、反射強度值對精度影響研究流程圖 ...55 圖 4-1、紅色目標物最適平面曲線與強度值分佈圖 ...57 圖 4-2、綠色目標物最適平面曲線與強度值分佈圖 ...59 圖 4-3、藍色目標物最適平面曲線與強度值分佈圖 ...60 圖 4-4、黃色目標物最適平面曲線與強度值分佈圖 ...61 圖 4-5、白色目標物最適平面曲線與強度值分佈圖 ...63 圖 4-6、黑色目標物最適平面曲線與強度值分佈圖 ...64 圖 4-7、紅色目標物點雲精密度與精確度分佈圖 ...66 圖 4-8、綠色目標物點雲精密度與精確度分佈圖 ...68 圖 4-9、藍色目標物點雲精密度與精確度分佈圖 ...69 圖 4-10、黃色目標物點雲精密度與精確度分佈圖 ...71 圖 4-11、白色目標物點雲精密度與精確度分佈圖 ...72 圖 4-12、黑色目標物點雲精密度與精確度分佈圖 ...74 圖 4-13、顏色與其平均強度值和點雲精密度之關係圖 ...77 圖 4-14、顏色與其平均強度值和點雲精確度之關係 ...79
表目錄
表 2-1、不同材質掃瞄測試整理表 ... 11 表 3-1、Trimble GS200 型三維雷射掃瞄儀規格 ...30 表 3-2、強度值分類表 ...31 表 3-3、紅色目標物四次掃瞄 RGB 強度值平均表 ...40 表 3-4、紅色目標物其各強度值區段點雲數統計表 ...41 表 3-5、綠色目標物五次掃瞄 RGB 強度值平均表 ...42 表 3-6、綠色目標物其各強度值區段點雲數統計表 ...43 表 3-7、藍色目標物五次掃瞄 RGB 強度值平均表 ...44 表 3-8、藍色目標物其各強度值區段點雲數統計表 ...45 表 3-9、黃色目標物五次掃瞄 RGB 強度值平均表 ...46 表 3-10、黃色目標物其各強度值區段點雲數統計表 ...47 表 3-11、白色目標物五次掃瞄 RGB 強度值平均表 ...48 表 3-12、白色目標物其各強度值區段點雲數統計表 ...49 表 3-13、黑色目標物五次掃瞄 RGB 強度值平均表 ...50 表 3-14、黑色目標物其各強度值區段點雲數統計表 ...51 表 3-15、各顏色平均強度值表 ...52 表 4-1、紅色目標物各強度值區段精度表 ...57 表 4-2、綠色目標物各強度值區段精度表 ...58 表 4-3、藍色目標物各強度值區段精度表 ...60 表 4-4、黃色目標物各強度值區段精度表 ...61 表 4-5、白色目標物各強度值區段精度表 ...62 表 4-6、黑色目標物各強度值區段精度表 ...64 表 4-7、紅色目標物各強度值點雲至覘標平面平均距離表 ...66表 4-8、綠色目標物各強度值點雲至覘標平面平均距離表 ...67 表 4-9、藍色目標物各強度值點雲至覘標平面平均距離表 ...69 表 4-10、黃色目標物各強度值點雲至覘標平面平均距離表 ...70 表 4-11、白色目標物各強度值點雲至覘標平面平均距離表 ...72 表 4-12、黑色目標物各強度值點雲至覘標平面平均距離表 ...73 表 4-13、顏色與其平均強度值和最適平面精度表 ...77 表 4-14、顏色與其平均強度值和點雲至 Target 平面距離表 ...78
第一章 前言
1-1 研究之動機與目的
近年來各種工程應用三維雷射掃瞄儀的案例日漸增多,舉凡土木建設工 程、防災與災害調查、建築古蹟管理、隧道測量、工廠設施監測、及自然景觀 調查等,上述工程的共同點皆為測量範圍小、被測物之空間關係複雜且可能正 處於持續變化狀態,應用三維雷射掃瞄儀是因其具有下列優點:只需一個儀器 立足點,即能以不接觸被測物的方式快速獲得待測物表面非常高密度且高精度 的三維點位,相較於傳統測量儀器是針對待測物體表面單一特徵點進行量測的 方法,三維雷射掃瞄儀更適用於需物體表面的測量;三維雷射掃瞄儀除具有快 速獲得物體表面資訊以外,更解決了因觀測者所產生的人為觀測誤差;三維雷 射掃瞄儀為主動式量測,由儀器自行發射雷射光源,在黑暗中亦可作業,對於 像是在隧道的測量有極大幫助;傳統測量儀器常因為對於待測物體取樣不足, 在測量工作的可靠度上易令人存疑,將三維雷射掃瞄儀的技術應用於空間資料 蒐集、分析,可突破傳統測量受限的方法,能精確、大量、快速且連續地蒐集 資料,對於分析結果更具有真正的意義及代表性。 經三維雷射掃瞄儀作業後所得到之眾多三維空間座標一般以”點雲”稱之, 點雲資料的優劣影響著後續的內業處理與成果分析,由以往的文獻資料可以知道 三維雷射掃描儀於戶外進行掃描作業時會受到許多外在環境因素的影響,如距 離、角度、材質、溫度、濕度及壓力等等,而使得三維點雲座標資料之精度變差, 例如以本研究所使用之Trimble GS200型三維雷射掃瞄儀,雖原廠規格為掃瞄距 離為200公尺時精度可達6mm但實際檢驗後發現在50m以內精度最佳,超過此距 離儀器距離待測物越遠則精度精度大幅降低;此外在角度方面,以70° 作為三維 雷射掃瞄儀一個臨界指標,當掃瞄角度在70° 以內的掃瞄點可作為點雲疊合的共 軛點,而掃瞄角度大於70° 則無法判定。以點雲資料獲取而言,三維雷射掃瞄儀的原理是應用接收雷射反射訊號的 時間差,來得到各點位的三維空間座標,反射訊號的優劣也影響著點雲資料的 精度,而點雲資料中之反射強度值 (Intensity) 即為反射訊號的一種,利用反射 強度值進行一些點雲資料的判讀,在空載光達上是利用因不同的材質具有不同 的反射強度,故可由反射強度來幫助區分地表上的物體,但在三維雷射掃瞄儀 (地面光達)方面,強度值的應用卻幾乎沒有,故本研究中一部分將探討強度值 對精度之影響。 此外對待測物之顏色而言,對於不同顏色其反射的能力也有差異,例如亮 色系具有較好的反射能力,故本研究亦對欲掃瞄的目標物作多種顏色的搭配並 對其作掃描,以瞭解顏色與強度值之關係。綜合上述三維雷射掃瞄儀精度影響 之因子,本研究將探討三維雷射掃瞄儀目標物顏色因子對反射強度及精度之影 響,探討顏色與強度值的關係,以及分析強度值對精度之影響,實驗是否反射 強度高其精度也越好,以及其之間關係。
1-2 研究流程
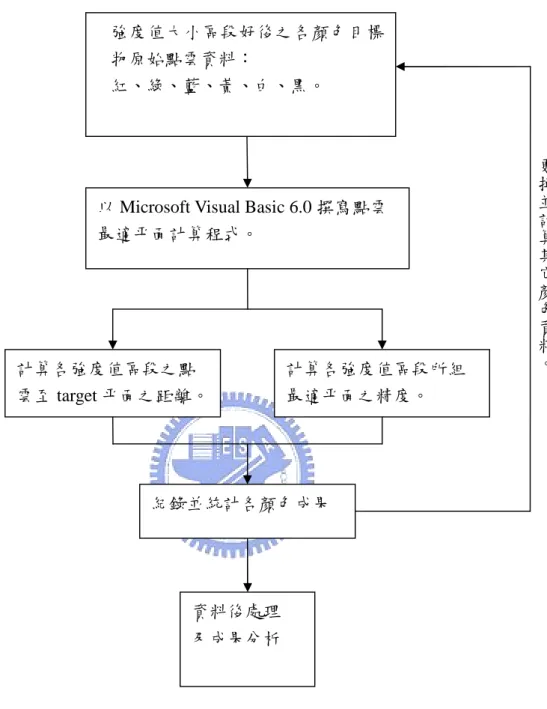
本研究實驗所用儀器為Trimble的子公司Mensi所生產的GS200型三維雷射掃 瞄儀,此款雷射掃瞄儀為中距離掃瞄儀器;而實驗中所佈設在目標物上之覘標亦 為Mensi原廠所率定製造之反射覘標(Target)。因本研究為探討目標物顏色因子對 反射強度及精度之影響,為了避免因實驗場設置於室外,使陽光造成對雷射光束 的影響,進而影響實驗的準確性,故實驗場選擇在交通大學工程二館的224教室 內進行對目標物的實驗。目標物顏色共計有六種,實驗分別對六種顏色進行掃 描,每種顏色各掃瞄五次,再將掃描所得點雲資料進行資料格式轉換和分類,進 行下列兩種分析:1. 目標物顏色因子與反射強度關係。2. 反射強度對精度之影 響分析。研究流程如圖1-1。 1. 目標物顏色因子與反射強度關係 本研究使用經 GS200 型三維雷射掃瞄儀掃瞄各種顏色製作而成之目標物, 利用所得之點雲進行目標物顏色因子與反射強度關係的分析,目的在於探討目標 物顏色對強度值的影響。方法為利用點雲資料中的強度值,進行整筆資料的分 類,首先將點雲資料強度值以昇冪方式排列,再將資料中強度值每間隔 10 為一 單位共分為 27 類,並進行統計以瞭解此種顏色的強度值分佈情形,以得到目標 物顏色因子與反射強度關係。 2. 反射強度對精度影響之分析 由於欲了解強度值對精度之影響,掃描後所得點雲資料亦需進行以強度值 差異量 10 的一個分類。反射強度對精度影響之分析,本研究以兩種方法作為分 析的指標,分別是(1)各反射強度值區段所組最適平面精度、(2)各反射強度值區 段之點雲至覘標(target)所組成之最適平面的平均距離。利用此兩種計算成果經統 計後以供分析強度值對精度之影響。圖 1-1、研究流程圖 實驗用儀器之選定 資料後處理及成果分析: ◎ 成果彙整 ◎ 成果分析 ◎ 結論與建議 研究動機與擬定研究目的及 方法 實驗場所之選定 目標物顏色因子與反射強度之關係 反射強度對精度影響之分析 文獻整理: ◎ 過去國內外相關研究 ◎ 光達量測理論
1-3 文獻回顧
本研究將探討三維雷射掃瞄儀目標物顏色因子對於反射強度及精度影響 之研究,在研究中將先論述目標物的選擇與實驗場的設計,最後對目標物各強 度值區段精度以點雲最小二乘適平面求取理論作為計算之方法。 在過去的研究中已對反射標的製作材料選取已有研究(賴志凱,2004),在反 射標的製作材料選取,基本要求是需對於雷射光反射能力強,也就是掃瞄點有較 高的強度值(Intensity),主要原因是反射力較強的反射標其有效的掃瞄距離較 長,使用時才不會受距離的限制。其次是該物體經掃瞄後其點雲分佈形狀仍能維 持原反射標幾何形狀。最後則是使用的反射標選擇容易製作且材質容易取得。但 由於本研究旨在探討目標物的顏色對於反射強度以及經度之影響,且本研究實驗 為短距離,若仍以高反射強度材質作為本實驗目標物將造成三為雷射掃瞄儀的多 路徑效應,其效應發生在近距離掃瞄強反射表面將造成距離誤差[Runne et al, 2001]。故參照過去研究選出適合本研究目標物之材質,其中經簡單測試後,選 擇以大型壁報紙較佳,因其具有顏色豐富、取得容易、擺設簡單等特性。 此外對實驗場的設計以室內掃瞄場為佳,在過去室外的檢定研究中(粘惎 非,2005)發現於戶外檢定場最大的困難是無法控制環境因子,其實驗得知中環 境因素可影響三維雷射掃瞄的精度,尤其是陽光對雷射光束的甚至可能達到十 多公分的偏差。且陽光影響雷射光束的精度,將造成雷射測距本身精度降低, 亦加上太陽直射會使儀器溫度提高,也將影響到三維雷射掃瞄儀本身定位的精 度,因此建議在實際作業上,盡量選用陰天或日曬不強烈的時段進行野外掃瞄。 在研究中各種顏色之目標物經掃瞄後,其點雲資料的精度判定將以點雲最 適平面求取,而其理論基礎則是利用最小二乘平差理論:方法為分別利用 X、Y、Z 坐標作為觀測值,透過迭代門檻值的設定,進行點雲最適平面方程求取 工作,並選定所有點雲群與最適平面距離平方和為最小當作主要之點雲最適平 面。於點雲最小二乘適平面求取方法中,經實驗(徐元俊,2006)測試結果,以 最小二乘理論對於點雲進行最適平面求取工作,透過門檻值進行迭代計算,可 以正確地獲得最適平面方程式,利用 X、Y 坐標作為觀測量時,所求取出點雲 最適平面之精度較佳,且兩者精度較為一致,並呈現穩定的趨勢,而利用 Z 坐 標作為觀測量計算時,由於點雲的剔除率成效不一致,因此在點雲最適平面精 度較易呈現出不穩定的趨勢。這樣的情形可在進行單次計算時,就能發現何者 最終求解精度較佳,可以利用點雲剔除門檻值的重新設定,讓迭代計算的次數 增加,使得以 Z 坐標作為觀測量時,最適平面成果與 X、Y 為觀測量時相近, 但此步驟將參雜較多人力介入,因此,仍然較建議採用 X 或 Y 坐標為觀測直進 行最適平面計算工作。
1-4 論文架構
本論文之基本架構分為五個章節,各章節之研究內容簡要概述如下: 第一章 說明本論文之研究動機與目的、本研究所進行的研究流程與方法,和相 關文獻回顧,以及本研究之組織架構。 第二章 理論基礎與研究方法: 2-1 節:顏色的組成和目標物材質的選擇 2-2 節:最小二乘最適平面 2-3 節:對於三維雷射掃瞄儀的掃瞄特性、原理及誤差來源作一說明。 第三章 目標物顏色因子與反射強度關係之研究: 3-1 節:說明三維雷射掃瞄的外業掃瞄工作及內業資料處理部分。 3-2 節:簡述相關使用軟硬體設備及規格。 3-3 節:說明實驗資料與實驗設計。 3-4 節:對於目標物顏色因子與反射強度之關係進行分析。 第四章 反射強度對精度影響分析: 4-1 節:說明實驗資料與實驗設計。 4-2 節:以最適平面精度比較各顏色之精度。 4-3 節:以覘標所組最適平面為基準計算各顏色點雲至此之平均距離,並 與最適平面精度結合,比較資料的精確度與精密度。 4-4 節:探討顏色、反射強度值與精確度以及顏色、反射強度值與精密度 之關係。 第五章 結論與建議: 根據本研究的實驗結果與分析進行總結,以提供未來進行相關研究可供加 強的地方,並提出一些建議。第二章 理論基礎與研究方法
本研究旨在探討目標物顏色因子對三維雷射掃瞄儀的影響,故在本章將先 說明本研究物體顏色為可見光照射下所判定之顏色,以及研究中目標物材質將 以適合近距離掃瞄且取得容易及製作方便之紙張為選定的材質。接著介紹本研 究精度計算上將以最小二乘最適平面為計算方法,由於三維雷射掃瞄儀掃瞄得 到的點雲資料是屬於面的資訊,空間中的特徵點可由三個平面交會得到,而兩 個相交會的平面亦可求出一條特徵線 (徐元俊,2006) ,也由於本研究目標物 設計為大平面,故以最小二乘最適平面計算較合適。最後並對所使用之三維雷 射掃瞄儀器作一介紹,先簡述三維雷射掃瞄儀之技術、特性,再介紹三維雷射 掃瞄儀之掃瞄原理。2-1 顏色的組成和目標物材質的選擇
2-1-1 目標物顏色的選擇
顏色是通過眼、腦和我們的生活經驗所產生的一種對光的視覺效應圖像是 自然界中的客觀景物透過某種系統的映射,使人們產生的視覺感受。人們在觀 察景物時,視覺的第一印象乃是顏色的感覺。顏色是通過眼、腦和人類的生活 經驗所產生的一種對光的視覺效應亦可說顏色是視覺系統對可見光的感知結 果。而光如何通過眼、腦使人們產生關於顏色的感受,在於光線在進入眼睛後 於視網膜轉換成神經中樞的訊號,再經由視神經到達腦部,而眼睛回憶三種紅、 綠、藍原色和頭腦解析顏色,就如同綜合以上三種訊號。解析顏色的變化極大, 完全是根據外在的環境而定。當一樣的顏色經由日光或是燭光所看到的顏色會 不一樣。然而,人類的勢力可適應於光線的來源,可以讓我們在兩種情況下決 定同一種顏色。 1666 年英國科學家牛頓第一個揭示了光的性質和顏色的秘密。並以光的散色實驗說明太陽光是各種顏色的混合光,並發現光的顏色決定於光的波長。光 波是一種具有一定頻率範圍的電磁波,電磁波的波長和強度可以有很大的區 別,電磁波中只有一小部分能夠引起人類眼睛的興奮而被感覺,在人可以感受 的波長範圍內(約 380nm 至 740nm),此段電磁波範圍被稱為可見光,有時也 被簡稱為光。 假如將一個光源各個波長的強度列在一起,就可以獲得這個光源 的光譜。一個物體的光譜決定這個物體的光學特性,包括它的顏色。不同的光 譜可以被人接收為同一個顏色。雖然可以將一個顏色定義為所有這些光譜的總 和,但是不同的動物所看到的顏色是不同的,不同的人所感受到的顏色也是不 同的,因此這個定義是相當主觀的。 構成顏色的實質是可見光。其存在必須的 3 個實體是︰光線、被觀察對象 和觀察者。其組成為觀察對象的顏色是指該對象在可見光的照射下,所反射的 各光譜成分作用於人眼的綜合效果;對於透射對象則是透過該物體的光譜綜合 作用的結果。此外光是由光子組成的。不同波長的光由不同能量的光子組成。 波長λ和能量 E 間的關係為 E=hc/λ 式中 h 為普朗克常數,c 為光速。當光子 射到物體上時,某波長的光子能量與物質內原子的振動能,或電子發生躍遷時 所需能量相同時,就易被物質吸收,其它波長的光就不易被吸收。物質對光的 選擇吸收,就造成了各自的顏色。而當各種不同波長的光信號一同進入我們的 眼睛的某一點時,視覺器官會將它們混合起來,作為一種顏色接受下來。物體 的顏色決定於它對光線的吸收和反射,實質上決定於物質的架構,不同的物質 架構對不同波長的光吸收能力不同,例如一個反射所有波長的光的表面是白色 的,而一個吸收所有波長的光的表面是黑色的但由於大多數光源的光譜不是單 色的,它們的光是由不同強度和波長的光混合組成的。人眼將許多這樣的混合 光的顏色與單色光源的光的顏色看成是同樣。比如橙色,實際上就不是單色的 波長 600nm 的光,實際上它是由紅色和綠色的光混合組成的(顯示器無法產生 單色的橙色)。出於眼睛的生理原理,我們無法區分這兩種光的顏色。也有許多
顏色是不可能是單色的,因為沒有這樣的單色的顏色,好比黑色、灰色和白色 就是這樣的顏色,粉紅色或紫色也是這樣的顏色。 綜合上面對顏色的簡介,故本實驗中對目標物顯色都是在可見光環境下做 探討,與一般外業掃瞄環境相同。而目標物之顏色選擇將以單色系顏色為主, 其中目標物顏色將以光的三原色紅、綠、藍以及單色系之黃色、黑色以及白色。
2-1-2 目標物材質的選擇
本研究目標物的材質選擇,參考過去對反射標的製作材料選取之研究,依 照其設計精神以及材質的測試,經改良後以供本研究目標物使用。 過去對反射標的製作材料選取已有研究(賴志凱,2004),在反射標的製作材 料選取,基本要求是需對於雷射光反射能力強,也就是掃瞄點有較高的強度值 (Intensity),主要原因是反射力較強的反射標其有效的掃瞄距離較長,使用時才 不會受距離的限制。其次是該物體經掃瞄後其點雲分佈形狀仍能維持原反射標幾 何形狀。最後則是使用的反射標選擇容易製作且材質容易取得。但由於本研究旨 在探討目標物的顏色對於反射強度以及經度之影響,且本研究實驗為短距離,若 仍以高反射強度材質作為本實驗目標物將造成三為雷射掃瞄儀的多路徑效應,其 效應發生在近距離掃瞄強反射表面將造成距離誤差[Runne et al,2001],如圖2-1。 (a) (b) 圖2-1、強反射反應圖:(a)強反射物質,(b)定位之距離誤差在過去研究中已對一些較易取得的材質反射標進行一些簡單的測試掃瞄, 並從測試中找到合適的反射標材質。其測試的方式則是先在短距離(約15 公尺) 下對不同材質的物體進行單純的掃瞄,並藉由此次成果簡單選擇適用的材質,過 濾不合適的材質,表2-1為測試使用的材質、掃瞄時的強度值、幾何形狀完整性 及是否容易製作的整理。表中某些材質會有兩種不同的反射值,主要是由於不同 類型的產品(一般反光標)或物體擺設位置相對儀器不同所造成(鋁片、黑塑膠 板),這也代表此類物體的不穩定性,所以會加以淘汰。稜鏡反射性超強會有過 度反射而使得標中心位置無掃瞄點,但遠距離時只要雷射的足跡能涵蓋到稜鏡就 會產生觀測點,因而形成相當好的標形,而且仍然具有定位之效果,所以考量於 遠距離掃瞄時應用。 表2-1、不同材質掃瞄測試整理表(賴志凱,2004) 材質名稱 強度值 完整性 是否容易製作 採用與否 200~230 一般反光標 over 不佳 不易 否 測量用反射貼 紙 over 不佳 不易 否 鐵盤 75~85 佳 不易 否 鋁片 55~255 佳 不易 否 55~255 黑色塑膠板 over 佳 易 否 包裝紙 50~255 不佳 易 否 厚紙板 190~230 佳 易 是 一般用紙 180~230 佳 易 是 保麗龍 200~230 佳 易 是 240~255 稜鏡 over 可 使用現有產品 是 注:over 代表由於反射能量過強產生點雲不符合正常分佈的現象。
經其測試發現可使用的材質為以下四種:厚紙板、一般用紙、保麗龍、稜鏡,並 可依其使用場合分為以下兩類: (1). 短距離作業時使用的反射標: 採用紙類、厚紙板或保麗龍來製作反射標,反射標大小則視使用場合而定, 形式則是圓盤標。適用場合為距離較短(小於100 公尺),如建築古蹟維護、 坑道與洞穴測量及工廠設施與管線配置等作業。 (2). 長距離作業時使用的反射標: 以傳統稜鏡為主要測試反射標,大小與形式則為傳統稜鏡形式不做改變。 希望能在長距離掃瞄時使用,如防災與災害調查與自然景觀維護等作業, 並希望能進一步作為空載雷射掃瞄的地面反射標。 由於本研究實驗採取室內短距離下進行掃瞄,若選取強反射材質作為目標 物製作,將造成定位誤差而失去實驗的價值,並又考量目標物須搭配不同顏色但 材質仍需一致的情況下,將選取一般用紙,因一般用紙可購買到各種顏色而不須 經任何加工,免除經加工後造成目標物表面材質不同使得實驗不精確。综合上述 觀點本研究目標物材質的選擇將以一般用紙作為後續實驗所用。 (以方法)
2-2 最小二乘最適平面
由於目標物為平坦的紙面所佈設而成,在過去研究中自行設計之反射標形 狀上以使用幾何對稱的圖形為佳,利用其對稱的特性尋找其幾何對稱中心作為 反射標的特徵點,其中以圓盤狀或球狀較為常見。但由於本次目標物的選取為 大面紙張,並欲計算各反射強度值區段,而各強度值區段點雲分佈亦非均勻分 布,將造成對稱中心計算上的困難與誤差,故本研究目標物精度之計算將以最 小二乘最適平面作為計算方法。2-2-1 空間中平面方程式
空間中任意三點可組成一平面,而空間中的平面方程式一般均可簡化為 0 by cz d ax 的形式,其中 a、b、c、dR 且a2 b2 c2 0。此外空間 中平面 E 為通過不共線的三點 A(x1,y1,z1)、B(x2,y2,z2)、C(x3,y3,z3), 則平面 E 的方程式可以寫成: 0 1 3 1 3 1 3 1 2 1 2 1 2 1 1 1 z z y y x x z z y y x x z z y y x x 空間中解算平面方程式的方法有相當多種,由於點雲資料是儲存為 x、y、z 三 維坐標的型式,故採用axbyczd 0的形式,其中 x、y、z 為三維雷射掃 瞄點雲坐標值;a、b、c、d 為平面方程式各項係數。可將上式改寫為: ' ' ' ' aY b Z c X 其中X',Y,Z為點雲三軸之坐標值,a',b',c'為最適平面三個參數值。2-2-2 最小二乘最適平面
若以 X 軸向進行最適平面計算工作,先假設各點雲位於同一平面,並列出 下列方程式: fit fit fit x a Y b Z c V X' 則可得出觀測方程式: AX V L 其中各矩陣表示如下: n x X X X L : : 2 1 xn x x x v v v V : : 2 1 1 : : : : : : 1 1 2 2 1 1 n n Z Y Z Y Z Y A fit fit fit c b a X 以最小二乘法計算可得:
A A A L X T 1 T 經由最小二乘計算出點雲在最適平面 X 軸方向上殘差v 為:xi i fit i fit i fit xi a Y b Z c X v 獲得最適平面的各項參數afit、bfit、cfit後,再將所有計算最適平面的點雲相對
坐標值帶回最適平面計算得出點雲各點相對於最適平面的距離。 點雲各點與最適平面的距離d 為:xi 1 2 2 fit fit fit i i fit i fit xi b a c X Z b Y a d 標準誤差(Standard Deviation)為 u n V VxT x x ˆ ,n=該次最適平面所用的點雲總 數, u 為未知參數個數 3。 若我們將點雲資料與最適平面的距離視為誤差,並假設誤差為隨機分佈且獨
立,則標準誤差(Standard Deviation)如下: u n d dxT x dx ˆ ,n=該次最適平面所用的點雲總數 同理針對 Y 軸向進行最適平面計算工作,假定點雲位於同一平面,可列出 下列方程式: fit fit fit y d Z e X f V Y
其中X ,Y,Z為點雲三軸之坐標值,dfit,efit, ffit為最適平面三個參數值,以Y方 向坐標為觀測量,其矩陣形式亦可表示為: AX V L n y Y Y Y L : : 2 1 yn y y y v v v V : : 2 1 1 : : : : : : 1 1 2 2 1 1 n n X Z X Z X Z A fit fit fit f e d X 由最小二乘法可得出:
A A A L X T 1 T 經由最小二乘計算出點雲在最適平面 Y 軸方向上殘差vyi為: i fit i fit i fit yi d Z e X f Y v 獲得最適平面的各項參數dfit、efit、ffit後,再將所有計算最適平面的點雲相對
坐標值帶回最適平面計算得出各點雲相對於最適平面的距離。各點雲與最適平 面的距離dyi為: 1 2 2 fit fit fit i i fit i fit yi e d f Y X e Z d d
標準誤差(Standard Deviation)為 u n V VyT y y ˆ ,n=該次最適平面所用的點雲總 數, u 為未知參數個數 3。將點雲資料與最適平面的距離視為誤差,並假設誤差 為隨機分佈且獨立,則標準誤差(Standard Deviation)如下: u n d dTy y dy ˆ ,n=該次最適平面所用的點雲總數 同理針對 Z 軸向進行最適平面計算工作,假定點雲位於同一平面,可列出 下列方程式: fit fit fit z g X h Y i V Z
其中X ,Y,Z 為點雲三軸之坐標值,gfit,hfit,ifit為最適平面三個參數值。以Y方
向坐標為觀測量,其矩陣形式亦可表示為: AX V L n z Z Z Z L : : 2 1 zn z z z v v v V : : 2 1 1 : : : : : : 1 1 2 2 1 1 n n Y X Y X Y X A fit fit fit i h g X 由最小二乘法可得出:
A A A L X T 1 T 經由最小二乘計算出點雲在最適平面 Z 軸方向上殘差v 為:i i fit i fit i fit zi g X h Y i Z v 得最適平面的各項參數gfit、hfit、ifit後,再將所有計算最適平面的點雲相對坐
標值帶回最適平面計算得出各點雲相對於最適平面的距離。各點雲與最適平面 的距離d 為zi
1 2 2 fit fit fit i i fit i fit zi h g i Z Y h X g d 標準誤差(Standard Deviation)為 u n V V z T z z ˆ ,n=該次最適平面所用的點雲總 數, u 為未知參數個數 3。將點雲資料與最適平面的距離視為誤差,並假設誤差 為隨機分佈且獨立,則標準誤差(standard deviation)如下: u n d d z T z dz ˆ ,n=該次最適平面所用的點雲總數, u 為未知參數個數 3。 利用上面所述最小二乘最適平面計算原理,在掃瞄作業完成後將位於同一平面 上之所有點雲相對坐標匯出成 X,Y,Z 格式,代入最適平面方程式,透過最 小二乘平差法,可得此平面之標準偏差。
以上述之計算原理,並利用 Microsoft visual basic 6.0 進行程式撰寫,將上 述理論基礎轉為程式運算。由於最適平面以 X、Y 作為觀測量進行計算時,其 成果較為穩定,且精度較佳,且最適平面精度可由單次計算推測最終何者精度 較佳(徐元俊,2006),故實驗中計算最適平面將以 X 軸為觀測量進行單次計算。
2-3 三維雷射掃瞄儀系統
2-3-1 三維雷射掃瞄儀之介紹
三維雷射掃瞄儀是一種能在短時間內快速獲取大量高精度三維點位相對坐 標的儀器,且只需一個儀器立足點,即能以不接觸被測物的方式快速獲得待測 物表面非常高密度且高精度的三維點位,相較於傳統測量儀器是針對待測物體 表面單一特徵點進行量測的方法,三維雷射掃瞄儀更適用於需物體表面的測 量;三維雷射掃瞄儀除具有快速獲得物體表面資訊以外,更解決了因觀測者所 產生的人為觀測誤差;三維雷射掃瞄儀為主動式量測,由儀器自行發射雷射光 源,在黑暗中亦可作業,對於像是在隧道的測量有極大幫助;傳統測量儀器常 因為對於待測物體取樣不足,在測量工作的可靠度上易令人存疑,將三維雷射 掃瞄儀的技術應用於空間資料蒐集、分析,可突破傳統測量受限的方法,能精 確、大量、快速且連續地蒐集資料,對於分析結果更具有真正的意義及代表性。 三維雷射掃瞄儀掃瞄方式因掃瞄需求不同,使其設計而有不同,根據應用 距離之不同,近距離的有 50 公尺以內的,主要針對小型模型、機械工程或小型 古蹟等;長距離的有 200 公尺以上甚至至 500 公尺者,不但可應用於古蹟建模 重構,還可針對大型結構體、科技廠房、隧道、小範圍地形監測及橋樑變形等 等;精密測量儀器不斷更新,近距離的掃瞄儀器由於受地形限制,對於大範圍 的地形變化、地殼變動、邊波滑動等監測之作業均較難應用,因此更長距離的 雷射掃瞄儀就一一誕生,並以遠距光達稱之。也由於三維雷射掃瞄儀可在室內 外不宜移動的、危險的、非接觸性的、不規則的、非線性的、高價值的、資産 密集性的複雜目標實體或實景進行資料獲取、建模、立體貼圖。諸如:邊坡滑 動監測工作、古蹟文物的重新建模、建築物外圍影像敷貼工作都有相當大的助 益。2-3-2 三維雷射掃瞄儀之特性
三維雷射掃瞄儀利用雷射測距的原理,由儀器本身發射出雷射光束,接觸 到物體表面後反射再接收物體所反射之訊號,經由相位或脈衝時間差的計算, 可推求出被測物與三維雷射掃瞄儀之間的斜距(SD),配合掃瞄的水平方向角 (HA)與垂直方向角(VA),可推求得出每一掃瞄點雲與測站之水平距(HD) 與高差(VD),可得到掃瞄點雲與掃瞄儀的三度空間相對坐標差值,再配合掃 瞄角度的不同,可以計算出掃瞄儀中心至測點的三維坐標差,且可同時記錄回 訊之強度值。而三維雷射掃瞄之相對坐標定位,是以掃瞄儀的雷射光源為原點, 自成一個局部坐標系統,根據右手定則,以掃瞄儀的右側為 X 方向,正對目標 物的方向為 Y 方向,而垂直軸方向為 Z 方向,再藉由雷射光發射和接收的時間 差和相位差,計算出雷射光源與掃瞄點之間的距離和角度,以計算出待測掃瞄 物點的相對點位坐標值。(如圖 2-2 所示) 圖 2-2、三維雷射掃瞄儀與物體間相對坐標系示意圖 三維雷射掃瞄儀的優點在於能在最短時間內快速地獲得物體表面大量的 空間覆蓋資訊,每秒所能觀測的點位能達萬點之多,瞬間產生大量觀測資料, X 物體 SD VD VA HA HD Y Z 掃 瞄 儀因此通常需連接電腦以便即時儲存資料。它提供大量且快速的點位相對坐標 值,進而詳實且客觀地描述待測點位之表面特性。三維雷射掃瞄所得到的初步 資料是均勻密佈於被測物表面的三維點雲(Point Cloud),但外型複雜的地物, 例如:儲槽、橋樑等,皆須聯合多測站的觀測點雲資料才能由內業處理結合成 一個完整的表面模型。當被測物無法以一次掃瞄涵蓋範圍完整觀測時,則需整 合多個測站所產生的點雲來達成任務。然而由於各觀測站的參考坐標系統之不 同,因此點雲資料的連結(Joint)並非單純的資料合併,必須找尋出參考坐標 系統之間的轉換關係,才能解決資料結合的問題。 雷射波長會影響反射的能量,因此所觀測得的反射強度與波長有關,若使 用近紅外雷射光會對植物有較強的反射。雷射的觀測有效距離是儀器重要的應 用條件,尤其對大型地物或場景的觀測,或是無法接近的地物,皆需要較長的 觀測距離。然而,距離越遠的地物觀測精度越差,若要保持儀器所宣稱的測距 精度,則觀測距離需在其標準範圍內。三維雷射掃瞄儀的定位精度與測距精度、 瞬間視角、水平與垂直角精度皆有關係,所以必須綜合這些所有條件來評估三 維雷射掃瞄儀。三維雷射掃瞄儀需要兩種軟體的配合才能發揮功能,一是控制 軟體,另一則是資料處理軟體。控制軟體是安裝在與掃瞄儀連接的電腦上,操 作員可透過控制軟體的介面指定掃瞄的範圍、密度及一些相關的掃瞄功能,同 時監控掃瞄的情形並記錄所有數據。 此外,三維雷射掃瞄儀所得的初步資料是均勻密佈於被測物表面的三維點 雲資料尚是隱性(Implicit)資料,對於被測物並非顯性(Explicit)描述,對大 多數的工程測量應用而言,需要將點雲資料進行模型化(Modeling)的處理, 以便獲得被測物之物件式或圖元式的顯性描述,才能符合需求。單一測站往往 無法完整涵蓋複雜或大型的地物,實測時需規劃好觀測網形,使得掃瞄區域能 完全涵蓋整個被測物的表面。然而,點雲資料的參考坐標系統是定義於測站位
置、水平面及起始掃瞄方向(或磁北方向),不同測站的點雲資料具有不同的參 考坐標系統,因此點雲連結的問題即是求得彼此參考坐標系統的轉換關係,或 將所有點雲轉換到一個共同的參考坐標系統。 三維雷射掃瞄儀系統可以用來掃瞄任何物體或實景,進而實現三維立體資 訊的採集及資料建模,特別適於不規則構成的大型目標及實景。透過三維的雷 射掃瞄,直接將室內外各種大型目標(實體或實景)以三維資料形態的方式量 化到電腦中,然後進行目標的綜合測繪、三維建模、立體編輯及分析處理等後 處理工作,其主要的技術應用包含: 1. 三維的、徹底的、直接的向量化實體目標。 2. 大量採集的三維資料可對目標進行各種分析處理。 3. 可對目標進行三維資料模型的重建。 4. 提供其他 3D 設計軟體(如:Microstation)及管理軟體所需之模型及資料。 5. 將掃瞄之目標物可數化後轉到其他軟體作景觀設計、照明模擬。 6. 可利用物件重組軟體將掃瞄後之各零組件、殘骸物重新組合,以了解與原 設計之差異。 7. 目標物掃瞄數化後可提供點位比對,分析受力前後之全面變化情形。
2-1-3 三維雷射掃瞄儀量測原理
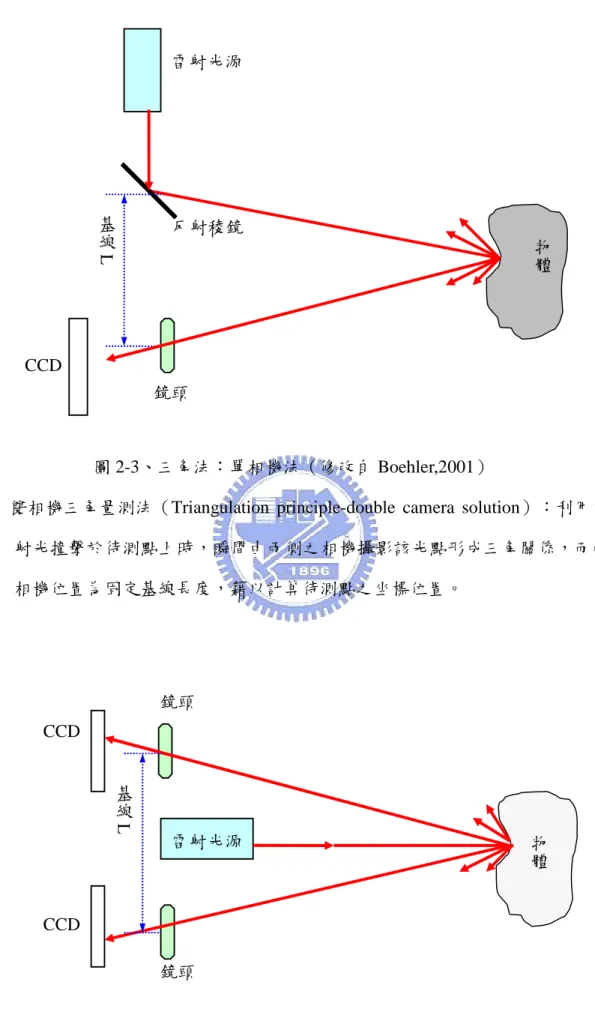
本節簡單介紹本研究所使用之三維雷射掃瞄儀的原理。由儀器本身發射出 雷射光束,接觸到物體表面後反射再接收所反射之訊號,經由相位或脈衝時間差 的計算,可推求出被測物與掃瞄儀之間的斜距,配合掃瞄的水平與垂直方向角, 可推求得每一掃瞄點與測站之三度空間相對坐標差,再配合掃瞄角度的不同,可 以計算出掃瞄儀中心至測點的三維坐標差(即為相對坐標值),且可同時記錄回 訊之強度值。基本原理依三維雷射掃瞄量測原理不同主要可分為三角法和時間差 量測兩種: (一) 三角法(triangulation) 此方法利用三角形幾何關係求得距離。先由掃瞄儀發射雷射光到待測物體 表面,經由入射光與反射光之間的夾角,利用在基線另一端之相機接收物體反射 之訊號,且雷射光源與CCD之間的基線長度經率定已知,經由三角形幾何關係推 求雷射掃瞄儀與待測物體之間之距離。採用此種方法的三維雷射掃瞄在近距離 (小於2 公尺)的精度較時間差系統為佳,其最大測距範圍也較短,測距精度與 本身基線長度有關。而另外一種三角法是採用兩台各自架設在基線兩端的相機, 接收經待測物體反射之訊號,計算雷射掃瞄儀與物體間之距離。1. 單相機三角量測法(Triangulation principle-single camera solution):如圖2-3 示意圖,利用雷射光撞擊於待測點上時,瞬間由另一側之相機攝影該光點形 成三角關係,而雷射頭與相機位置為固定基線長度,藉以計算待測點之坐標 位置。
圖 2-3、三角法:單相機法(修改自 Boehler,2001)
2. 雙相機三角量測法(Triangulation principle-double camera solution):利用雷 射光撞擊於待測點上時,瞬間由兩側之相機攝影該光點形成三角關係,而兩 相機位置為固定基線長度,藉以計算待測點之坐標位置。 圖 2-4、三角法:雙相機法(修改自 Boehler,2001) CCD 物 體 CCD 鏡頭 鏡頭 雷射光源 基 線 L 物 體 基 線 L 鏡頭 反射稜鏡 雷射光源 CCD
(二) 時間差量測(Time-of-Flight) 由雷射掃瞄儀發射出脈衝雷射光到物體表面,再接收經由物體表面反射回 來的訊號,計算往返時間長度,求得雷射掃瞄儀與待測點之間的距離。採用此種 方法的掃瞄儀比起三角法(triangulation)可測量較遠的距離,但在近距離時,精 度卻顯得較差。一般而言,誤差仍隨著距離增加而增。 圖 2-5、時間差量測法示意圖(修改自 Boehler,2001) 物 體 反射稜鏡 雷射光源
2-1-4 座標轉換
掃瞄儀坐標系與物空間坐標系之關係可表示如圖 2-6 所示,其中 S 為掃瞄 儀的位置,P 點為待測點的位置(三維雷射掃瞄儀坐標系原點),O 點為物空間 坐標系的原點。ρ為 S 到 P 之間的距離,α為 S 與 P 點之間的垂直角,θ為其水 平角。 圖 2-6、掃瞄儀坐標系與物空間坐標系之關係圖(修改自 Lichti et al,2000) 由掃瞄坐標系轉換到物空間坐標系的數學式可寫成如下面公式所示,利用三個 或以上的物空間之已知控制點坐標進行轉換(Lichti et al.,2002)。 s p p Mr R R
T p p p p x y z r :P 點在掃瞄坐標系中的坐標向量。
T p p p p X Y Z R :P 點在物空間坐標系中的坐標向量。
T s s s s X Y Z R :掃瞄坐標系原點 S 在物空間坐標系的坐標向量。 物空間坐標系 z x y S X Y Z ρ O yp xp zp yp xp xs ys 掃瞄儀坐標系 θ α s P zp 反射稜 zsM 為一分別繞 X、Y、Z 軸旋轉(ω、φ、κ)角度之旋轉矩陣。 cos cos cos sin sin sin sin cos cos sin sin sin sin cos cos sin cos cos sin cos sin sin cos sin sin sin cos cos cos M 而公式 p Mrp Rs R 亦可改寫成: s p R r M-1 Rp
2-1-5 三維雷射掃瞄儀誤差來源
以三維雷射掃瞄儀掃瞄後可快速得到大量密佈於被測物的點雲,但此些大 量密佈之點雲中可能含有許多種誤差,這些誤差的來源可能跟儀器自身之掃瞄震 動或環境因素以及人為操作等等原因有關。就針對可能影響點雲坐標值的誤差類 型進行分類,並對這類誤差的可能來源加以說明。依傳統測量對觀測誤差的基本 概念,將這些誤差分成以下三類: A. 錯誤(mistakes): 以人為誤差為例大多是因為儀器操作不當或數據處理步驟錯誤所造成,只 要小心謹慎便能減少此類誤差的產生。此外由於三維雷射掃瞄儀測距是由物體 反射回來的訊號的時間,透過計算得出掃瞄儀與待測物之間的距離,但是雷射 遇到強反射物(如:反射覘標)時,會在物體前端產生許多的散射點,使得三 維雷射掃瞄儀獲得的回訊可能不只一個,此稱為多路徑效應,而多路徑效應普 遍發生在掃瞄強反射的物體表面、近距離對於待測物進行掃瞄工作以及在掃瞄 物體角落時發生(Runne et al,2001),亦可能會產生較大的距離誤差,此亦為 一般測量作業中所見之錯誤,通常這種較大的距離誤差可以透過人眼判斷或是 點雲濾除門檻值的設定而消除掉,但是對於產生在角落凹面較小的誤差,便會 對於點雲產生不確定的距離誤差。故為避免此些誤差通常须事後重測或重複的 觀測將有利於錯誤的偵除。B. 系統性誤差(systematic errors): 系統性誤差則是具有系統性或規律的誤差,產生原因主要是儀器的率定不 夠完善,例如當製造廠商儀器率定工作不嚴謹或儀器長久使用未送回原廠檢俢, 便容易使得儀器掃瞄得資料有系統性誤差存在。而系統性誤差又主要有測距誤 差、掃瞄角誤差、參考原點誤差、比例尺誤差以及坐標軸方向誤差等等因素。有 時環境的因素也可能會造成系統性誤差的行為。此種誤差是可以被發現的,例如 雷射光束的寬度可能提高雷射測距儀在測距準確度上的偏移量,特別是在雷射光 束在特定的入射角度,其回訊無法準確被掃瞄儀判別時所產生。這樣的誤差 tan 2 ,其中為測距的誤差,為產生 誤差所處的距離,為雷射 入射角,為雷射光束在待測物上產生的雷射點直徑(Lichti,2005)。以上述為 例只要在掃瞄作業前,能透過適合檢定方法來確定儀器之系統性誤並加以校正, 將可避免因誤差造成掃瞄點雲資料精度過差,而提高資料的正確性。 C. 偶然誤差(accidental errors): 偶然誤差是無法以系統性參數描述的誤差,其大小及符號呈現”偶然性”且 不可預期,隨機誤差量的統計性質通常偏向正常分佈。雷射掃瞄的隨機誤差的中 誤差可由雷射測距儀的測距精度及反射稜鏡的測角精度來推估,此中誤差直接反 應儀器本身的定位能力。
第三章 目標物顏色因子與反射強度關係之研究
3-1 實驗掃瞄工作規劃
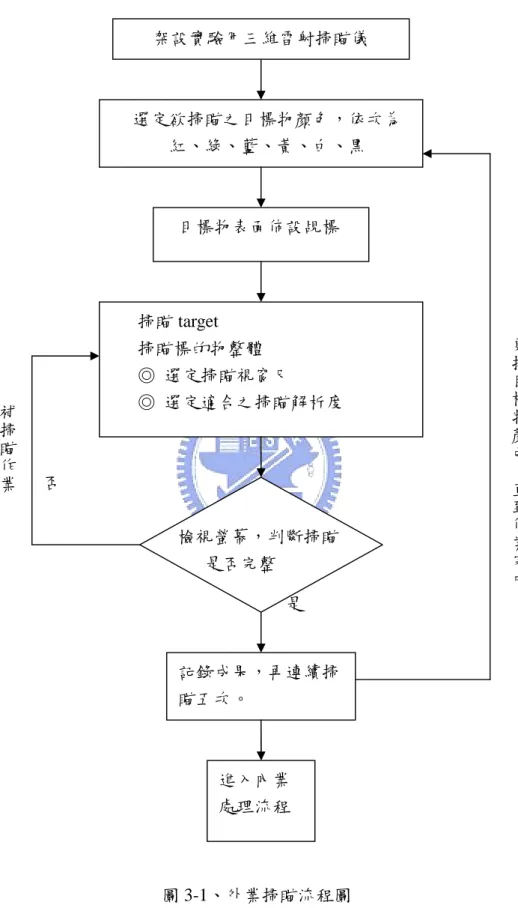
此章節旨在研究目標物顏色因子與反射強度之關係,由前面可知物體的顏 色與照射光線有關,而絕大多數掃瞄外業工作都處於可見光之照射下,故本實驗 執行環境模擬成一般外業環境,即在一般可見光環境中進行,但未免於室外掃瞄 時受日光直接照射而影響掃瞄成果(粘惎非,2005),故實驗場地的選擇於交通大 學土木工程系214教室內進行。 本研究所使用之Trimble GS200三維雷射掃瞄儀架設方法與傳統儀器相同, 但三維雷射掃瞄儀之優點在於無須定心定平,但在一般掃瞄外業上卻必須另設置 至少三個共軛點位,作為測站與測站之間的點雲的相互連結之用,而在共軛球點 位上增加靜態GPS測量或是結合多主站RTK系統可將掃瞄得到之點位相對坐標 值,換算為WGS84或TWD97等常用之坐標系統,再利用空間後方交會法(Space resection),可計算出三維雷射掃瞄儀中心之坐標。由於本次實驗於室內環境下執 行,儀器不進行移動,故不需設置共軛點。此外一般測量外業於待測物表面佈設 控制覘標點位,目的在於透過控制覘標測量出精確的點位,以供後續需高精度內 業處理上應用。而本研究亦於目標物上佈設覘標除作為查驗最適平面精度之用 外,亦可作為檢查儀器是否有因掃瞄時的震動而有所改變。 本次外業掃瞄皆採用高精度高密度掃瞄,目的為了求出最適平面方程式並 探討目標物顏色因子與反射強度之關係,外業規劃掃瞄流程如圖3-1所示。圖 3-1、外業掃瞄流程圖 選定欲掃瞄之目標物顏色,依次為 紅、綠、藍、黃、白、黑 目標物表面佈設覘標 掃瞄 target 掃瞄標的物整體 ◎ 選定掃瞄視窗尺 ◎ 選定適合之掃瞄解析度 否 是 更 換 目 標 物 顏 色 , 直 到 作 業 完 成 補 掃 瞄 作 業 檢視螢幕,判斷掃瞄 是否完整 進入內業 處理流程 記錄成果,再連續掃 瞄五次。 架設實驗用三維雷射掃瞄儀
3-2 使用儀器、軟體說明
本實驗所採用三維雷射掃瞄儀為Trimble公司生產的 GS200型,其規格如表 3-1所示,Trimble GS200型操作軟體為Trimble Point Scape 2.1。掃瞄後所得之三 維點雲資料處理以Real Works Survey 4.1進行處理,例如:原始掃瞄點雲雜訊濾 除、點雲切割、資料格式的輸出等工作。三維點雲資料分類程式以Microsoft Visual Basic 6.0撰寫。 本實驗所採用之三維雷射掃瞄儀由於是利用測角、測距來推算物體的相對 坐標值,因此儀器掃瞄點雲的精度亦與儀器有效掃瞄距離有關。下圖3-2則為 Trimble GS200型三維雷射掃瞄儀在各不同距離時儀器之標準誤差。 表3-1、Trimble GS200型三維雷射掃瞄儀規格(Trimble,2005) 使用介面 Windows XP/NT/2000 動態放射 8bits 資料介面 筆記型電腦/PDA(TCP/IP或無線網路Wifi) 掃瞄視角 水平:360度(400g) 垂直:上、下各30度 電源 交流:AC 110-240V-50/60Hz 直流:DC 24V nominal 掃瞄速度 每秒5000點
覘標規格 20 MENSI scan targets
光點尺寸、顏色 3 mm/50 m、綠光
圖3-2、Trimble GS200型三維雷射掃瞄儀距離與掃瞄精度關係圖(Mensi,2005)
本實驗點雲資料可以坐標值:X、Y、Z;強度值:intensity;色階值:R、 G、B格式輸出,其中由於點雲強度值最小為0,最大為255,因此針對強度值 (intensity)的大小,以Microsoft Visual Basic 6.0撰寫一個分類強度值大小的程式, 將點雲依照強度值不同分成28組區段(Degree)(第一組強度為0,第二組強度為 1~10,第三組強度為11~20…以此類推,第28組強度為255),圖3-3為點雲分類程 式,而表3-2為經程式分類後各組強度值的表示方法。 圖 3-3、點雲分類程式 表3-2、強度值分類表 Intensity 0 1~10 11~20 21~30 31~40 41~50 51~60 intensity 61~70 71~80 81~90 91~100 101~110 111~120 121~130 intensity 131~140 141~150 151~160 161~170 171~180 181~190 191~200 intensity 201~210 211~220 221~230 231~240 241~250 251~254 255
3-3 實驗資料與實驗設計
3-3-1 實驗資料
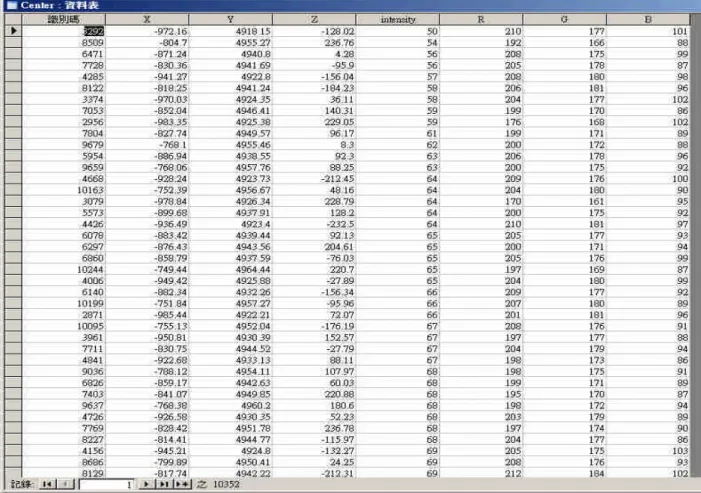
本實驗所使用之點雲資料為Trimble GS200型三維雷射掃瞄儀掃瞄觀測所 得,得到的資料除了有各個點雲相對於三維雷射掃瞄儀的三維相對坐標X、Y、Z, Trimble GS200型三維雷射掃瞄儀尚可輸出各點雲之強度值(intensity)與色階值 (R、G、B)。點雲資料利用Real Works Survey 4.1將包含上述格式之資料輸出,並 匯入Microsoft Office Access中,如圖3-4所示。
實驗的主要目的在於將觀測所得到的點雲資料,以上述格式輸出,以探討 目標物在不同顏色時其強度質與色階值的關係。
3-3-1-1 內業資料處理流程
經三維掃瞄儀掃瞄後之資料為原始點雲資料,由於在掃瞄時是以掃瞄整體 目標物進行,故必須將欲分析部份的部份切割出來,除確保資料的正確性外,亦 可作為初步雜訊之濾除。如圖3-5所示,紅色空選範圍為本實驗所需點雲資料。 又三維雷射掃瞄儀的點雲資料易受到空氣中粒子的影響而產生額外的雜訊,而這 些雜訊所呈現之顏色並不是本實驗欲探討之顏色,故所得到之原始點雲資料需先 經過濾除動作,已確保資料的正確。除此之外原佈設於目標物上以作為控制點為 之覘標,因屬於強反射物質,使掃瞄後覘標外框點雲會呈現白色雜訊,並非實驗 中所佈置的顏色,為後續資料處理上的正確性,需將其剔除,以保資料的正確。 圖3-6所示。分割出的點雲資料以Real Works Survey 4.1內建之點雲格式轉換程 式,將點雲以包含X、Y、Z坐標值;Intensity強度值;R、G、B色階值的資料格 式輸出。利用包含坐標直、強度值、色階值的資料,經自行撰寫之點雲分類程式 將點雲資料依照強度值大小不同,分類成28個區段,以供後續分析目標物顏色因 子與反射強度之關係。內業資料處理流程如圖3-7所示。(a) (b) 圖 3-6、控制覘標 (a)覘摽於掃瞄時強反射反應圖(b)強反射部分易造成雜訊(紅色框) (c)切割後然有殘餘雜訊呈現白色(紅色框) (c)
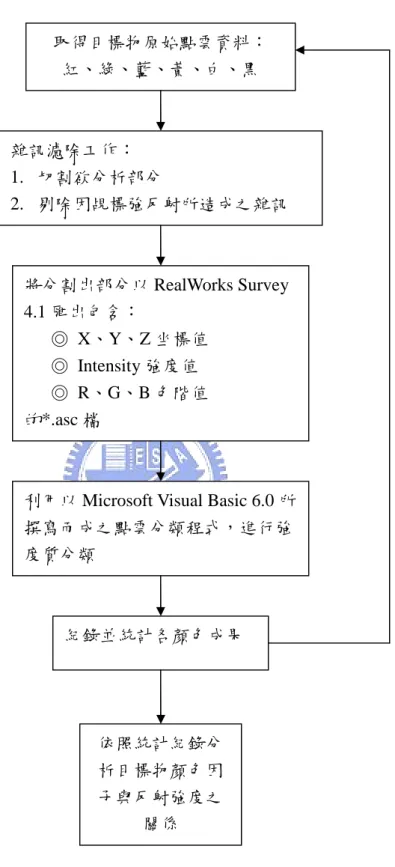
圖 3-7、內業處理點雲流程圖 取得目標物原始點雲資料: 紅、綠、藍、黃、白、黑 雜訊濾除工作: 1. 切割欲分析部分 2. 剔除因覘標強反射所造成之雜訊 將分割出部分以 RealWorks Survey 4.1 匯出包含: ◎ X、Y、Z 坐標值 ◎ Intensity 強度值 ◎ R、G、B 色階值 的*.asc 檔 依照統計紀錄分 析目標物顏色因 子與反射強度之 關係
利用以 Microsoft Visual Basic 6.0 所 撰寫而成之點雲分類程式,進行強 度質分類 紀錄並統計各顏色成果 更 換 其 它 顏 色 進 行 資 料 處 理
3-3-2 實驗設計
本研究實驗區選在交通大學工程二館 214 教室內進行,是由於一般掃瞄觀 測下,待測物顏色為經可見光反射後所呈現的顏色,故實驗場需選擇相同條件 下進行觀測,但為避免因陽光直射目標物而易造成雜訊的狀況產生,選擇室內 環境較佳。目標物的架設,本實驗將壓克力版佈設在牆面上,再將欲掃瞄之各 式顏色色紙黏貼於壓克力版上,並在色紙上貼控制用覘標。實驗中先掃瞄目標 物上所佈設的四控制覘標(Target),再對於整個目標物進行高密度的掃瞄工作, 掃瞄時採垂直正向掃瞄目標物並依照實驗之掃瞄順序,先掃瞄四個控制覘標, 再掃瞄整體目標物之五次掃瞄作業,且在五次掃瞄中不搬移或關機,也不旋轉 儀器掃瞄角度,以盡量減少可能影響精度的外在因素。如圖 3-8 為實驗場目標 物與儀器擺放示意圖,圖 3-9 實驗場目標物與儀器擺放位置圖,圖 3-10 為各種 顏色目標物設計與覘標佈設圖。 圖 3-8、實驗場目標物與儀器擺放示意圖 三維雷射掃瞄儀 待 測 之 目 標 物 距離:10 公尺 雷射光圖 3-9、實驗場目標物與儀器擺放位置圖
再將五次掃瞄所得控制覘標以 XYZ 坐標直輸出,並檢視五次覘標坐標是否有 偏移。由於本次掃瞄由於地面屬較為穩固的材質,因此五次掃瞄覘標所得之相 對坐標值差距甚小(最大變化量約在 0.1 mm),確認目標物的設置無偏移後, 將四個控制覘標五次掃瞄所得的相對坐標值進行平均的工作,作為本次控制覘 標點相對坐標值。掃瞄所得原始資料,以 3-3-1 節所述內業資料處理流程,分 割後之點雲資料中的強度值,由小至大以強度值 10 為一個區段,分成 28 個強 度值區段,以供後續分析目標物顏色因子與反射強度之關係。圖 3-10 為掃瞄之 點雲成果。 (a) (b) 圖 3-11、掃瞄之點雲成果圖 (a)覘標(Target)掃瞄成果,(b)目標物經高解析掃瞄之點雲成果
3-4 目標物顏色因子與反射強度之關係
本章節為研究目標物顏色因子與反射強度之關係實驗,以三維雷射掃瞄儀 高解析掃瞄後所得到之點雲資料進行分析,利用點雲資料中的強度值以及色階 值,進行資料統計與分析,驗證是否亮色系目標物具有較佳反射強度,以及各 種顏色的目標物的反射強度值分布情形。經由 3-3 節中所述實驗方法,將六種 目標物顏色,先以五次作業後之點雲成果資料分割出欲分析部分,再將分割後 之點雲依強度值大小不同進行分類,統計每次作業所得點雲之強度值區段的點 雲數量,並將五次成果紀錄和平均。成果如表 3-4、表 3-6、表 3-8、表 3-10、 表 3-12 和表 3-14 所示。上述 6 個表中 Intensity 為強度值,以每強度值相差 10 為一個區段(Degree)共分為 28 個區段如表 3-2 所示;數量(五次掃瞄之平均)為 每次掃瞄後各強度值 Degree 的平均值。 此外為證明目標物經三維雷射掃瞄儀掃描後其顏色仍為當初以肉眼選定之 顏色,以紅色目標物為例,當目標物以紅色為掃瞄目標時,先利用Real works 4.1 轉檔功能以*.asc格式檔輸出RGB值,再將RGB平均值輸入Photoshop的檢色器功 能,觀察經掃瞄後的顏色是否會受到雷射光影響使得掃瞄前後顏色具有差異。 圖、左為紅色目標物RGB值輸入檢色器並與右邊數位相機影像顏色比較,表、為 紅色目標物四次掃瞄R、G、B各自的平均值以及將四次平均值再做一總平均值, 由於Photoshop 檢色器僅可輸入整數,故將其中總平均值以四捨五入方式顯示。 (一) 紅色目標物強度值統計與分布情形: 由於紅色目標物之第三次掃瞄檔案毀損,故在後續資料呈現時,紅色目標 物僅以其中正確的四次資料為計算資料,由表、可看出四次掃瞄中紅色目標物R 的強度值範圍為:R值平均為143、最高143.53、最低142.64,最高與最低強度值 相差0.89;G值平均為58、最高58.38、最低58.03,最高與最低強度值相差0.35;B值平均為59、最高59.52、最低59.22,最高與最低強度值相差0.30。四次掃瞄RGB 差異性甚小,依此RGB值輸入Photoshop 檢色器並與數位相機之影像顏色進行比 較,由圖3-11可看出三維雷射掃描儀之影像較相機影像亮,原因該是因室內攝影 下無閃光燈拍攝,故相機影像看起來較暗,且三維雷射掃描儀相機CCD顏色呈現 也不同,但仍為紅色的顏色呈現。 表3-3、紅色目標物四次掃瞄RGB強度值平均表 紅色 第 1 次掃瞄 第 2 次掃瞄 第 4 次掃瞄 第 5 次掃瞄 平均 R 142.64 142.66 142.91 143.53 143 G 58.17 58.03 58.32 58.38 58 B 59.22 59.30 59.52 59.42 59 Photoshop 檢色器 相機影像 圖 3-12、Photoshop 檢色器與相機顏色比較(紅色) 將原始資料依照強度值大小區段,統計其強度值分布情形並紀錄成表,並 以四次掃瞄之平均數量作依統計,紅色目標物點雲數量總數平均為 7708 個,並 由表 3-4 可知紅色目標物於高反射值如強度值 181~225 部份幾乎完全沒有,僅 強度值於 225 時出現一點佔整體數量 0.0032%;中反射強度如強度值範圍: 91~180 點雲數量佔整體 0.0487%;而低反射強度範圍:低反射強度值 0~90 佔 整 體 99.9481% , 又 細 分 其 分 布 可 發 現 近 95% 數 量 集 中 在 強 度 值 11~20(49.9481%)、強度值 21~30(27.114%)和 31~10(9.9734%),初步可瞭解紅色 目標物屬於低強度值顏色,再將表 3-4 以直方圖顯示,由圖 3-12 可看出紅色目
標物顏色分佈趨近於常態分布且分布集中,資料大都集中在強度值 1~40 之間。 目標物強度分佈圖(紅) 0 500 1000 1500 2000 2500 3000 3500 4000 4500 0 20 40 60 80 100 120 140 160 180 200 220 240 254 點 雲 數 量 數量(平均) 圖 3-12、紅色目標物強度值分布直方圖 表3-4、紅色目標物其各強度值區段點雲數統計表 Intensity 0 1~10 11~20 21~30 31~40 41~50 51~60 數量(平均) 0.00 581.50 3850.00 2089.75 768.75 265.00 99.75 所佔比例(%) 0.0000 7.5441 49.9481 27.1114 9.9734 3.4380 1.2941 Intensity 61~70 71~80 81~90 91~100 101~110 111~120 121~130 數量(平均) 32.75 13.00 3.50 2.75 0.50 0.00 0.50 所佔比例(%) 0.4249 0.1687 0.0454 0.0357 0.0065 0.0000 0.0065 Intensity 131~140 141~150 151~160 161~170 171~180 181~190 191~200 數量(平均) 0.00 0.00 0.00 0.00 0.00 0.00 0.00 所佔比例(%) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 Intensity 201~210 211~220 221~230 231~240 241~250 251~254 255 數量(平均) 0.00 0.00 0.00 0.00 0.00 0.00 0.25 所佔比例(%) 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0032 (二) 綠色目標物強度值統計與分布情形: 以綠色目標物進行掃瞄,由表3-5可看出五次掃瞄中綠色目標物R、G、B的 色階值範圍為:R強度值平均為52、最高52.64、最低50.88,最高與最低強度值
相差1.76;G強度值平均為107、最高107.87、最低106.61,最高與最低強度值相 差1.26;G強度值平均為80、最高81.24、最低79.18,最高與最低強度值相差2.06。 RGB三者差異性甚小,亦以此R、G、B色階整數平均值輸入Photoshop 檢色器, 並由圖3-13可看出左邊以三維雷射掃瞄儀得到之綠色影像與數位相機綠色影 像,除亮度較暗外,顏色呈現仍相同。 表3-5、綠色目標物五次掃瞄RGB強度值平均表 綠色 第 1 次掃瞄 第 2 次掃瞄 第 3 次掃瞄 第 4 次掃瞄 第 5 次掃瞄 平均 R 強度值 52.13 52.64 51.08 50.88 51.44 52 G 強度值 107.87 106.61 107.01 107.01 106.69 107 B 強度值 81.24 80.07 79.98 79.69 79.18 80 Photoshop 檢色器 相機影像 圖 3-13、Photoshop 檢色器與相機顏色比較(綠色) 綠色目標物資料以五次掃瞄成果進行統計,經統計後其點雲總數平均為 7675.80 個,將成果紀錄成表 3-6,由表 3-6 可看出綠色目標物在低反射強度範 圍:強度值 0~90 佔整體數量之 65.0720%;於中反射強度範圍:強度值 91~180 佔整體 34.1489 %;而高反射強度範圍:181~255 則只佔整體之 0.7791%,再深 入瞭解可發現強度值的佔整體數量之 95%分布在強度值 30~140 之間,其中強 度值 51~100 就佔整體數量之 68.6573%,由此了解綠色目標物屬於中強度值反 應顏色。再將表 3-6 之資料以直方圖顯示,由圖 3-14 看出綠色目標物顏色分佈 亦趨近於常態分布但資料分布較紅色離散,資料大都集中在強度值 30~140 之
間。 目標物強度分佈圖(綠) 0 200 400 600 800 1000 1200 1400 0 20 40 60 80 100 120 140 160 180 200 220 240 254 點 雲 數 量 數量(平均) 圖 3-14、綠色目標物強度值分布直方圖 表3-6、綠色目標物其各強度值區段點雲數統計表 Intensity 0 1~10 11~20 21~30 31~40 41~50 51~60 數量(平均) 0.0 0.0 0.0 10.8 108.2 434.6 879.6 所佔比例(%) 0.0000 0.0000 0.0000 0.1407 1.4096 5.6620 11.4594 Intensity 61~70 71~80 81~90 91~100 101~110 111~120 121~130 數量(平均) 1174.6 1278.4 1108.6 828.8 615.6 427.0 286.8 所佔比例(%) 15.3026 16.6549 14.4428 10.7976 8.0200 5.5629 3.7364 Intensity 131~140 141~150 151~160 161~170 171~180 181~190 191~200 數量(平均) 180.2 121.4 77.0 51.8 32.6 24.2 13.2 所佔比例(%) 2.3476 1.5816 1.0032 0.6748 0.4247 0.3153 0.1720 Intensity 201~210 211~220 221~230 231~240 241~250 251~254 255 數量(平均) 8.2 5.4 2.8 1.4 2.2 2.0 0.4 所佔比例(%) 0.1068 0.0704 0.0365 0.0182 0.0287 0.0261 0.0052 (三) 藍色目標物強度值統計與分布情形: 以藍色目標物掃瞄,經資料整理後,由表3-7可看出五次掃瞄中藍色目標物 R、G、B的色階值範圍為:R強度值平均為77、最高77.07、最低74.11,最高與
最低強度值相差2.96;G強度值平均為118、最高120.41、最低113.72,最高與最 低強度值相差6.69;G強度值平均為176、最高179.25、最低170.60,最高與最低 強度值相差8.65。R值差異性甚小但G和B值差異性較大,再將R、G、B色階整數 平均值輸入Photoshop 檢色器,並進行後續分析。 表3-7、藍色目標物五次掃瞄RGB強度值平均表 藍色 第 1 次掃瞄 第 2 次掃瞄 第 3 次掃瞄 第 4 次掃瞄 第 5 次掃瞄 平均 R 76.38 77.42 77.82 77.07 74.11 77 G 119.03 120.04 120.41 119.29 113.72 118 B 176.51 177.22 179.25 178.29 170.60 176 Photoshop 檢色器 相機影像 圖 3-15、Photoshop 檢色器與相機顏色比較(藍色) 藍色目標物資料亦以五次掃瞄成果進行統計,經統計後其點雲總數平均為 7675.80 個,將成果紀錄成表 3-8,由表 3-8 可看出藍色目標物在低反射強度範 圍:強度值 0~90 佔整體數量之 79.6477%;而中反射強度範圍:強度值 91~180 佔整體 19.9302 %;高反射強度範圍:181~255 則只佔整體之 0.4221%,藍色目 標物中佔整體 95%的點雲都分布於強度值 21~130,較綠色目標物點雲所佔多數 的強度值稍低,且其中整體數量 68%分布於強度值 31~90 之間,亦較綠色目標 物所佔相同比例的分布範圍為低。亦將表、之資料以直方圖顯示,由圖 3-16 看 出綠色目標物顏色分佈亦趨近於常態分布但資料分布較低強度反射顏色離散 外,與反射強度相近之綠色目標物相比,其直方圖分佈亦較為偏向低反射反應。