行政院國家科學委員會專題研究計畫 期中進度報告
具有適應與創造能力之智慧型控制系統(1/3)
計畫類別: 個別型計畫 計畫編號: NSC92-2416-H-006-015- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立成功大學工業與資訊管理學系(所) 計畫主持人: 陳梁軒 報告類型: 精簡報告 報告附件: 出席國際會議研究心得報告及發表論文 處理方式: 本計畫可公開查詢中 華 民 國 93 年 5 月 20 日
行政院國家科學委員會專題研究計畫成果報告
具有適應與創造能力之智慧型控制系統 (1/3)
An Intelligent Control System with Adaptability and Creativity (1/3)
計畫編號:NSC 92-2416-H-006-015
執行期限:92 年 8 月 1 日至 93 年 7 月 31 日
主持人:陳梁軒 國立成功大學 工業與資訊管理學系
E-mail:lhchen@mail.ncku.edu.tw
一、中文摘要 本研究為第一年計畫,包括兩個主要 目的:(1) 建立智慧型控制系統的整體架 構;(2) 建立控制模組。智慧型控制系統除 了控制模組,尚有感知模組、適應模組及 創造模組。控制模組(稱為模糊類神經−符 號網路控制器)結合了模糊纇神經控制器 (連續變數式控制),及符號控制器(離散 變數式控制)。 關鍵詞:智慧型控制系統、模糊類神經網 路、符號控制器 1. AbstractThe project of first year contains two primary objectives: 1) construct the whole structure of intelligent control system, and 2) model the control module. Except the control module, the system involves perception module, adaptation module and creation module. The control module combines the fuzzy neural network controller for continu-ous control and the symbolic controller for discrete control, namely FNN−SN (an intel-ligent knowledge representation network based on fuzzy neural network and symbolic network).
Keywords: Intelligent Control System, Fuzzy Neural Network, Symbolic Con-troller
2. Background and Objectives
Designing a high-level knowledge rep-resentation is important to a control system because the intelligent behaviors of an artifi-cial system are closely linked to the knowl-edge base of system. In order to express in-telligent behavior of a system such as an arti-ficial animal [1] or an office robot [2], creat-ing an abundant knowledge representation is necessary. We present the FNN−SN as con-troller by combining the fuzzy neural net-work (FNN) and symbolic netnet-work (SN). The FNN deals with the continuous variables, e.g. the distance and angle of a robot, and the SN produces the discrete symbolic actions, such as “eat” or “walk” for an artificial ani-mal.
For more than a decade, neuro-fuzzy systems have been successfully applied to many fields. Relevant to this study, Shann and Fu [3] proposed a five-layer FNN with three learning phases. Kim and Kasabov [4] presented another similar structure of FNN, HyFIS. However, the applications of those two methods are limited, because of their complexity of methodology and computa-tional inefficiency. Hence, a five-layer FNN with multiple inputs and outputs [5] is de-veloped due to its easy implementation.
The initial setting of SN is determined according to prior experiments or knowledge. Dahlstedt and Nordahl [1] proposed a sym-bolic system for an artificial animal that can make songs and find mates. They used IF−THEN and LOOP as instructions for symbolic rules. However, in this study, we
extended their method to more instructions.
3. Methodology
3.1. System Structure
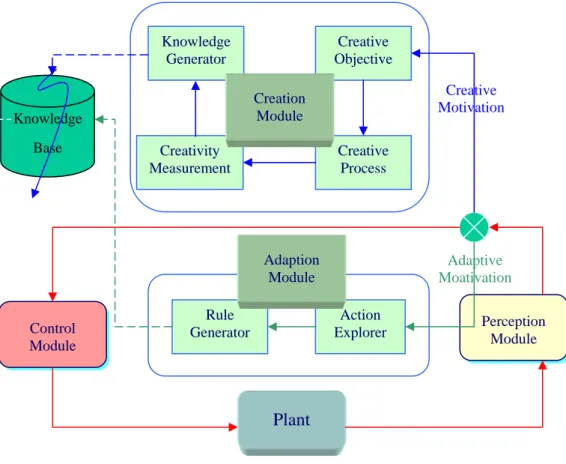
The whole structure of the intelligent control system is shown in Fig. 1. The con-trol module first generates the concon-trol inputs to the plant, and then the perception module perceives the conditions of system and envi-ronment. When the control efficiency of the system is poor, an adaptive motivation is generated to activate the adaptation module to search for appropriate system behaviors in order to adapt to diverse environments. Fur-thermore, if the inner system is imbalanced, or the environment deviates from normal conditions, a creative motivation will be in-stigated to enable the creation module to cre-ating novel and harmonious behavioral rules based on the creative objectives.
3.2. Control Module: FNN−SN Controller 3.2.1. FNN−SN Structure
The configuration of FNN−SN is shown in Fig. 2, where the FNN and SN in the FNN−SN controller are designed independ-ently. In the FNN−SN controller, symbolic rules of SN will be modified by the creation and adaptation modules, and the fuzzy rules of FNN are modified only in the adaptation module.
After either FNN or SN is activated, sensors S , i = 1, 2, …, k, are constructed Fi
for the purpose of enabling the FNN only. However, sensors S , j = 1, 2, …, m, are Sj
designed for SN and also serve as the inputs of SN. The possible value of a sensor is 0 or 1, specifying “false” or “true”. While S = Fi
1, the FNN is activated; otherwise, SN is used for control.
3.2.2. FNN
The FNN mainly includes two major types of learning, structure learning to gener-ate the initial fuzzy rules and parameter learning to fine-tune the membership func-tions. The detailed learning algorithm can be
found in [5]. All weights assigned to connect two nodes between two neighboring layers in the overall network are 1. The outputs of each layer for the FNN are described as fol-lows.
1) Layer 1: Directly, it transfers the input
vector to the second layer. The ith node in
this layer connects xi(1) to
) 1 (
i
y , i.e. the ith
output of layer 1.
2) Layer 2: Transforms the crisp values to
membership degrees using membership func-tions (or called activation function). For the output from the ith node of layer 1, y , the i(1)
output y(j2) is represented as
(
)
( )
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − = 2 2 ) 1 ( ) 2 ( 2 exp j j i j y y σ µ and i∈ (1) Pjwhere P is the set of nodes in layer 1 that j
connect to node j in layer 2, and µj/σj is the parameter of mean/standard deviation of the Gaussian membership function in the jth node.
3) Layer 3: Each node in the rule layer
speci-fies a possible IF part of a fuzzy rule, and carries out the fuzzy AND operation, as fol-lows:
∏
∈ = k P j j k y y(3) (2) (2) where P is the set of the nodes in layer 2 kconnecting to node k in layer 3. Thus, the output of node k, yk(3), is the product value
of all inputs to this node.
4) Layer 4: Each node in this layer represents
a possible THEN part of a fuzzy rule. The maximum operator is used for fuzzy OR op-eration. The function of this layer is
( )
(3) ) 4 ( max k P k l y y l ∈ = (3)where P is the set of nodes in layer 3 con-l
necting to the node l in layer 4.
5) Layer 5: Applying the correlation-product
inference and the centroid defuzzification scheme, the output signal can be evaluated as
∑
∑
∈ ∈ ⋅ ⋅ ⋅ = o o P l ol l ol P l ol l o y y y σ µ σ ) 4 ( ) 4 ( ) 5 ( (4)where P is the set of the nodes in layer 4 o
that connects to node o, and µol/σol is the parameters of mean/standard deviation of Gaussian membership function of the node l in layer 4.
3.2.3. SN
In this study, we integrate three instruc-tions, the IF−THEN, SWITCH, and LOOP into SN. Among these, the instruction IF−THEN can perform the symbolic func-tions, i.e. SUM and PRODUCT. The defini-tions of the three instrucdefini-tions are
IF−THEN:
(
)
(
)
( )[
]
{
∪ ∪ ∪ ∪ ∧ ∨ ∪ A∪A}
j S j S IF S F S c N N ~ ? <> (5) where { } { or } ~ ⎪⎩ ⎪ ⎨ ⎧ ∪ ∪ = P FP P S FS S V N F V N F F S S (6) SWITCH:(
) (
)
[
]
{
C NC NC}
A N A C k S N D N D N S ∪ ∪ 1∪ 1∪A1L ∪ ∪A ! (7) LOOP: @{
NL∪[
NA ∪A]
}
(8) The symbols “?”, “!”, and “@” specify the IF−THEN, SWITCH, and LOOP state-ments, respectively. NIF, NC, NA, and NLdenote the number of antecedents in IF-part, the number of discrete values in the kth sen-sor variable S of SWITCH instruction, the Sk
number of actions, and the number of loop counts, respectively. The sign “<>” can be one of the three relational symbols “>”, “=”, and “<”. S and c indicate the value of the Sj jth sensor in SN and a constant, respectively. F~ is a symbolic function indicating the summation function (FS) or product function
(FP), and NFS/NFP denotes the number of
sensors in FS / FP. S is a vector of sensors
consisting of NFS or NFP sensors. VS/VP
speci-fies the outcome of the function FS / FP
through calculations. The slash “/” in Eq. (5) indicates that only one of the two symbols can be chosen. The symbols “ ∧ ” and “ ∨ ” denote the AND and OR operators, respec-tively, and A is the action-sequence.
Regarding the SWITCH instruction, if sensor S is equal to Sk D , i = 1, 2, …, Ni C;
then carry out the corresponding action -sequence A . i S and Sk
i
D are restricted
to integer values. N and Ai i
A , i = 1, 2, …,
NC, specify the number of actions and action
-sequence for the case D , respectively. i
Four examples are given as follows.
4. Self-Assessment of This Project
We have successfully constructed the architecture of the intelligent control system with adaptability and creativity. Moreover, the control module within the system, namely FNN−SN controller, has also been well modeled. The following three modules of the system, i.e. perception module, adapta-tion module and creaadapta-tion module, will be modeled in the second and third years of the project.
Reference
[1] P. Dahlstedt, M.G. Nordahl, “Living Melodies: coevolution of sonic communication,” Leonardo, Vol. 34, No. 3, pp. 243–248, 2001.
[2] H. Asoh, Y. Motomura, F. Asano, I. Hara, S. Ha-yamizu, K. Itou, T. Kurita, T. Matsui, N. Vlassis, R. Bunschoten, B. Kröse, “Jijo-2: an office robot that communicates and learns,” IEEE Intell. Syst., Vol. 16, No. 5, pp. 46−55, 2001.
[3] J.J. Shann, H.C. Fu, “A fuzzy neural network for rule acquiring on fuzzy control system,” Fuzzy Sets Syst., Vol. 71, pp. 345−357, 1995.
[4] J. Kim, N. Kasabov, “HyFIS: adaptive neuro-fuzzy inference systems and their applica-tion to nonlinear dynamical systems,” Neural Networks, Vol. 12, pp. 1301−1319, 1999.
[5] L.-H. Chen, C.-H. Chiang, “New approach to in-telligent control systems with self-exploring process,” IEEE Trans. Syst., Man, Cybern. B, Vol. 33, No. 1, pp. 56−66, 2003.
Figure 1. The whole structure of proposed intelligent control system
Figure 2. The structure of FNN−SN
Perception Module Plant Knowledge Base Rule Generator Action Explorer Adaption Module Creative Objective Creative Process Creativity Measurement Knowledge Generator Creation Module Control Module Adaptive Moativation Creative Motivation Symbolic Actions … SN’s Sensors Real Values FNN SN . . . m S S 1 F S k F S . . . 1 S S . . . . . . … FNN’s Sensors Symbolic rules
R1. Instruction (Sensors, Functions)→Actions; R2. Instruction (Sensors, Functions)→Actions;
… …