國立臺灣大學工學院機械工程學系 碩士論文
Department of Mechanical Engineering College of Engineering
National Taiwan University Master Thesis
壓電複合結構模態感測與濾除之研究
Research of Modal Sensors and Filters of Piezoelectric Composite Structures
李智航 Chih-Hang Li
指導教授:周元昉 博士 Advisor: Yuan-Fang Chou, Ph.D.
中華民國 98 年 1 月
January, 2009
i
壓電複合結構模態感測與濾除之研究
中文摘要
本文使用最佳化方法來設計壓電複合結構之模態感測器。通常儀器所量測到 的信號為所有模態的信號的加總,然而透過不斷的修正電極形狀來使所要感測的 模態之信號遠大於其餘模態的信號。先利用有限元素法分析軟體 ANSYS 分析出全 部鋪滿接地電位的電極之系統模態,再利用本文所提不影響系統模態的切割方法 切割出所需的電極形狀,而所需電極形狀配合系統模態振形透過 MATLAB 進行形狀 之最佳化設計,並利用信號後處理來感測特定模態,此時只針對某幾個特定模態 來設計。反之,亦可以達到濾除某特定模態之信號。
為驗證本文所提方法的可行性,以鋁板黏貼壓電片為例,利用微影製程定義 出最佳電極的形狀,使用衝擊槌來激振試片,將電流信號轉電壓信號並作運算,
再將信號輸入頻譜分析儀,結果確能達到模態感測器與模態濾除器的效果。
關鍵字:壓電複合結構、最佳化、模態感測、模態濾除
ii
Abstract
Chih-Hang Li, M.S., National Taiwan University, January, 2009
Research of Modal Sensors and Filters of Piezoelectric Composite Structures Major Professor: Yuan-Fang Chou
Piezoelectric modal sensors can be created using the orthogonal property of eigenfunctions. Sensors have been designed for use with 1-D flexural structures by shaping electrode patterns proportional to modal strains. However, it is not easy to apply the same concept to general structures due to the difficulty in implementing the location weight needed for signals. Therefore, a nonlinear optimization scheme is proposed in this paper to design modal filters for general structures. For any given electrode pattern, the signal contributed from each mode is found by integrating the corresponding free surface charges on the sensing electrode. A modal filter is obtained by modifying the electrode pattern to achieve the desired relative signal strength for different modes.
Sensors capable of capturing or filtering out the signal generated by a specific mode can be developed. A PZT coated aluminum plate is used as an example. Mode shapes are found with finite element analysis. Design of both a mode-pass and mode-reject filter is demonstrated. This method also works for three-dimensional structures, as only free surface charges are involved in the operation of modal filters.
Key words: Piezoelectric Composite Structures, sensor, filter, optimization
iii
目 錄
中文摘要... i
Abstract... ii
目 錄 ... iii
表目錄……….…….vi
圖目錄……….……….……….xxv
符號表………...……….xxxvi
第一章 緒論... 1
1.1 前言... 1
1.2 文獻回顧... 1
1.3 本文內容... 3
第二章 模態感測器之設計... 4
2.1 壓電體之模態分析... 4
2.2 壓電系統之邊界條件... 6
2.3 模態感測之設計... 8
第三章 實例分析與討論...11
3.1 有限元素分析...11
3.2 單功用感測電極與分析結果... 12
3.2.1 第一模態感測 ... 13
3.2.2 第二模態感測 ... 15
3.2.3 第三模態感測 ... 16
3.2.4 第四模態感測 ... 17
3.2.5 第五模態感測 ... 17
3.2.6 第一模態濾除 ... 17
iv
3.2.7 第二模態濾除 ... 18
3.2.8 第三模態濾除 ... 19
3.2.9 第四模態濾除 ... 20
3.2.10 第五模態濾除 ... 20
3.3 多功能感測電極與分析結果... 20
3.3.1 第一、二和五模態濾除 ... 20
3.3.2 第三模態感測與濾除 ... 22
3.3.3 第四模態感測與濾除 ... 23
3.3.4 第五模態感測與濾除 ... 24
第四章 實驗與討論... 26
4.1 試片製造... 26
4.1.1 定義電極形狀 ... 26
4.1.2 黏貼壓電片 ... 27
4.1.3 量測電路 ... 28
4.2 量測架構... 29
4.2.1 雷射都卜勒儀感測位移速度 ... 29
4.2.2 感測器與濾波器效果檢測 ... 29
4.3 量測結果... 30
4.3.1 第一模態感測器與第一模態濾除器 ... 30
4.3.2 第二模態感測器與第二模態濾除器 ... 32
4.3.3 第三模態感測器與第三模態濾除器 ... 33
4.3.4 第四模態感測器與第四模態濾除器 ... 33
4.3.5 第五模態感測器與第五模態濾除器 ... 34
4.3.6 多功能第一、二和五模態濾除器 ... 35
4.3.7 多功能第三模態感測與濾除器 ... 36
v
4.3.8 多功能第四模態感測與濾除器 ... 37
4.3.9 多功能第五模態感測與濾除器 ... 37
4.3.10 結果討論 ... 38
第五章 結論與建議... 40
參考文獻... 41
附表... 43
附圖... 100
附錄A ... 153
附錄B ... 154
附錄C ... 155
vi
表目錄
表3. 1 壓電複合結構前五模態之自然頻率 ... 43
表3. 2 第一模態感測最佳化結果 ... 43
表3. 3 第二模態感測最佳化結果 ... 44
表3. 4 第三模態感測最佳化結果 ... 44
表3. 5 第四模態感測最佳化結果 ... 45
表3. 6 第五模態感測最佳化結果 ... 45
表3. 7 第一模態濾除最佳化結果 ... 46
表3. 8 第二模態濾除最佳化結果 ... 46
表3. 9 第三模態濾除最佳化結果 ... 47
表3. 10 第四模態濾除最佳化結果 ... 47
表3. 11 第五模態濾除最佳化結果 ... 48
表3. 12 第一、二和五模態濾除最佳化結果 ... 48
表3. 13 第三模態感測與濾除最佳化結果 ... 49
表3. 14 第四模態感測與濾除最佳化結果 ... 49
表3. 15 第五模態感測與濾除最佳化結果 ... 50
表 4. 1 固定端(x=0)至各波峰和節點之距離 ... 50
表 4. 2 敲擊點標號 ... 50
表 4. 3 垂直敲擊角落 (GZ)雷射量測第一模態感測器之共振頻率和 dB 值 ... 51
表 4. 4 側向敲擊角落 (G )雷射量測第一模態感測器之共振頻率和 dB 值y ... 51
vii
表 4. 5 敲擊各點,第一模態感測器信號之 dB 值 ... 51 表 4. 6 第一模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之dB
差... 52 表 4. 7 第一模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之 dBy
差... 52 表 4. 8 垂直敲擊角落 (GZ)雷射量測第一模態濾除器之共振頻率和 dB 值
... 53 表 4. 9 側向敲擊角落 (G )雷射量測第一模態濾除器之共振頻率和 dB 值y
... 53 表 4. 10 敲擊各點,第一個模態濾除器信號之 dB 值 ... 53 表 4. 11 第一模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 54 表 4. 12 第一模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 55 表 4. 13 敲擊各點,第一模態感測與濾除器信號之 dB 差... 55 表 4. 14 垂直敲擊角落 (GZ)雷射量測第二模態感測器之共振頻率和 dB
值... 56 表 4. 15 側向敲擊角落 (G )雷射量測第二模態感測器之共振頻率和 dBy
值... 56 表 4. 16 敲擊各點,第二模態感測器信號之 dB 值 ... 56 表 4. 17 第二模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 57 表 4. 18 第二模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
viii
dB 差 ... 58 表 4. 19 垂直敲擊角落 (GZ)雷射量測第二模態濾除器之共振頻率和 dB
值... 58 表 4. 20 側向敲擊角落 (G )雷射量測第二模態濾除器之共振頻率和 dBy
值... 59 表 4. 21 敲擊各點,第二模態濾除器信號之 dB 值 ... 59 表 4. 22 第二模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 59 表 4. 23 第二模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 60 表 4. 24 敲擊各點,第二模態感測與濾除器信號之 dB 差... 61 表 4. 25 垂直敲擊角落 (GZ)雷射量測第三模態感測器之共振頻率和 dB
值... 61 表 4. 26 側向敲擊角落 (G )雷射量測第三模態感測器之共振頻率和 dBy
值... 62 表 4. 27 敲擊各點,第三模態濾除器信號之 dB 值 ... 62 表 4. 28 第三模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 62 表 4. 29 第三模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 63 表 4. 30 垂直敲擊角落 (GZ)雷射量測第三模態濾除器之共振頻率和 dB
值... 64 表 4. 31 側向敲擊角落 (G )雷射量測第三模態濾除器之共振頻率和 dBy
ix
值... 64 表 4. 32 敲擊各點,第三模態濾除器信號之 dB 值 ... 64 表 4. 33 第三模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 65 表 4. 34 第三模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 65 表 4. 35 敲擊各點,第三模態感測與濾除器信號之 dB 差... 66 表 4. 36 垂直敲擊角落 (GZ)雷射量測第四模態感測器之共振頻率和 dB
值... 67 表 4. 37 側向敲擊角落 (G )雷射量測第四模態感測器之共振頻率和 dBy
值... 67 表 4. 38 敲擊各點,第四模態感測器信號之 dB 值 ... 67 表 4. 39 第四模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 68 表 4. 40 第四模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 68 表 4. 41 垂直敲擊角落 (GZ)雷射量測第四模態濾除器之共振頻率和 dB
值... 69 表 4. 42 側向敲擊角落 (G )雷射量測第四模態濾除器之共振頻率和 dBy
值... 69 表 4. 43 敲擊各點,第四模態感測器信號之 dB 值 ... 70 表 4. 44 第四模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 70
x
表 4. 45 第四模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y dB 差 ... 71 表 4. 46 敲擊各點,第四模態感測與濾除器信號之 dB 差... 71 表 4. 47 垂直敲擊角落 (GZ)雷射量測第五模態感測器之共振頻率和 dB
值... 72 表 4. 48 側向敲擊角落 (G )雷射量測第五模態感測器之共振頻率和 dBy
值... 72 表 4. 49 敲擊各點,第五模態感測器信號之 dB 值 ... 72 表 4. 50 第五模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 73 表 4. 51 第五模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 74 表 4. 52 垂直敲擊角落 (GZ)雷射量測第五模態濾除器之共振頻率和 dB
值... 74 表 4. 53 側向敲擊角落 (G )雷射量測第五模態濾除器之共振頻率和 dBy
值... 75 表 4. 54 敲擊各點,第五模態濾除器信號之 dB 值 ... 75 表 4. 55 第五模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 75 表 4. 56 第五模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 76 表 4. 57 敲擊各點,第五模態感測與濾除器信號之 dB 差... 77 表 4. 58 垂直敲擊角落 (GZ)雷射量測多功能第一、二和五模態濾除器之
xi
共振頻率和dB 值 ... 77 表 4. 59 側向敲擊角落 (G )雷射量測多功能第一、二和五模態濾除器之y
共振頻率和dB 值 ... 78 表 4. 60 敲擊各點,第一模態濾除器信號之 dB 值 ... 78 表 4. 61 第一模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 78 表 4. 62 第一模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 79 表 4. 63 敲擊各點,第二模態濾除器信號之 dB 值 ... 80 表 4. 64 第二模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 80 表 4. 65 第二模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 81 表 4. 66 敲擊各點,第五模態濾除器信號之 dB 值 ... 82 表 4. 67 第五模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 82 表 4. 68 第五模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 83 表 4. 69 垂直敲擊角落 (GZ)雷射量測多功能第三模態感測與濾除器之共
振頻率和dB 值 ... 84 表 4. 70 側向敲擊角落 (G )雷射量測多功能第三模態感測與濾除器之共y
振頻率和dB 值 ... 84 表 4. 71 敲擊各點,第三模態感測器信號之 dB 值 ... 84
xii
表 4. 72 第三模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之 dB 差 ... 85 表 4. 73 第三模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 85 表 4. 74 敲擊各點,第三模態濾除器信號之 dB 值 ... 86 表 4. 75 第三模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 87 表 4. 76 第三模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 87 表 4. 77 敲擊各點,第三模態感測與濾除器信號之 dB 差... 88 表 4. 78 垂直敲擊角落 (GZ)雷射量測多功能第四模態感測與濾除器之共
振頻率和dB 值 ... 89 表 4. 79 側向敲擊角落 (G )雷射量測多功能第四模態感測與濾除器之共y
振頻率和dB 值 ... 89 表 4. 80 敲擊各點,第四模態感測器信號之 dB 值 ... 89 表 4. 81 第四模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 90 表 4. 82 第四模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 90 表 4. 83 敲擊各點,第四模態濾除器信號之 dB 值 ... 91 表 4. 84 第四模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 92 表 4. 85 第四模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
xiii
dB 差 ... 93 表 4. 86 敲擊各點,第四模態感測與濾除器信號之 dB 差... 93 表 4. 87 垂直敲擊角落 (GZ)雷射量測多功能第五模態感測與濾除器之共
振頻率和dB 值 ... 94 表 4. 88 側向敲擊角落 (G )雷射量測多功能第五模態感測與濾除器之共y
振頻率和dB 值 ... 94 表 4. 89 敲擊各點,第五模態感測器信號之 dB 值 ... 94 表 4. 90 第五模態感測器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 95 表 4. 91 第五模態感測器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 96 表 4. 92 敲擊各點,第五模態濾除器信號之 dB 值 ... 96 表 4. 93 第五模態濾除器,垂直敲擊Gz點雷射與敲擊各點感測器信號之
dB 差 ... 97 表 4. 94 第五模態濾除器,側向敲擊G 點雷射與敲擊各點感測器信號之y
dB 差 ... 98 表 4. 95 敲擊各點,第五模態感測與濾除器信號之 dB 差... 98
xiv
圖目錄
圖 1. 1 信號處理感測不同模態 ... 100
圖2. 1 使用切割線設計多個感測電極 ... 101
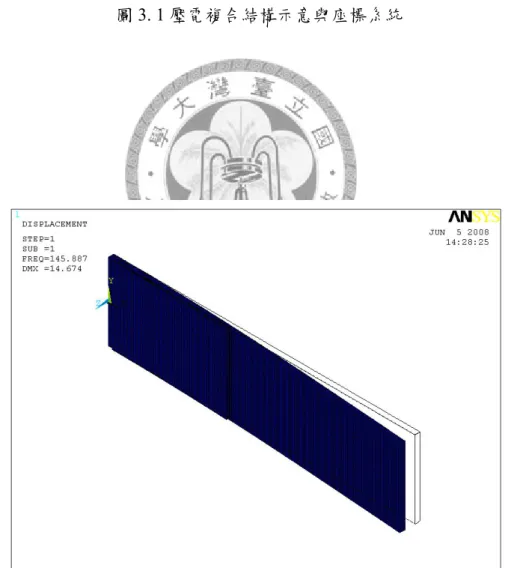
圖3. 1 壓電複合結構示意與座標系統 ... 102
圖3. 2 壓電結構第一位移模態 ... 102
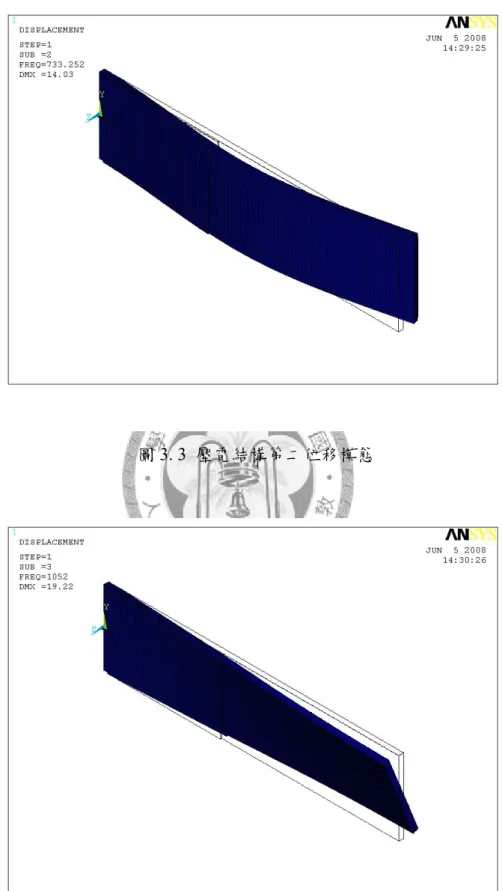
圖3. 3 壓電結構第二位移模態 ... 103
圖3. 4 壓電結構第三位移模態 ... 103
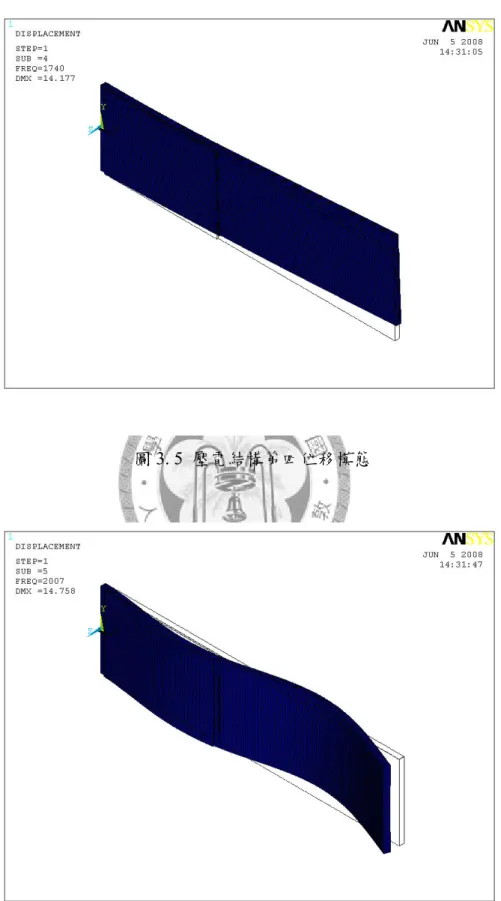
圖3. 5 壓電結構第四位移模態 ... 104
圖3. 6 壓電結構第五位移模態 ... 104
圖3. 7 第一模態電位移 z 分量 ... 105
圖3. 8 第二模態電位移 z 分量 ... 105
圖3. 9 第三模態電位移 z 分量 ... 106
圖3. 10 第四模態電位移 z 分量 ... 106
圖3. 11 第五模態電位移 z 分量... 107
圖3. 12 感測電極形狀設計 ... 107
圖3. 13 A 款電極 ... 108
圖3. 14 跨阻抗放大器 ... 108
圖3. 15 差動放大器 ... 109
圖3. 16 連接信號線示意圖 ... 109
圖3. 17 第一模態感測之初始與最佳化電極邊界(藍色虛線為初始邊界,紅 色實線為最佳邊界)...110
xv
圖3. 18 第二模態感測之初始與最佳化電極邊界(藍色虛線為初始邊界,紅 色實線為最佳邊界)...110 圖3. 19 B 款電極 ...111 圖3. 20 第三模態感測之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...111 圖3. 21 第四模態感測之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...112 圖3. 22 第五模態感測之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...112 圖3. 23 C 款電極 ...113 圖3. 24 第一模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...113 圖3. 25 D 款電極 ...114 圖3. 26 第二模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...114 圖3. 27 E 款電極...115 圖3. 28 第三模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...115 圖3. 29 第四模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...116 圖3. 30 第五模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊界,紅
色實線為最佳邊界)...116 圖3. 31 第一二五模態濾除電極之示意圖 ...117 圖3. 32 第一二五模態濾除之初始與最佳化電極邊界(藍色虛線為初始邊
界,紅色實線為最佳邊界)...117
xvi
圖3. 33 第三模態感測與濾除電極之示意圖 ...118 圖3. 34 第三模態感測與濾除之初始與最佳化電極邊界(藍色虛線為初始
邊界,紅色實線為最佳邊界)...118 圖3. 35 第四模態感測與濾除電極之示意圖 ...119 圖3. 36 第四模態感測與濾除之初始與最佳化電極邊界(藍色虛線為初始
邊界,紅色實線為最佳邊界)...119 圖3. 37 第五模態感測與濾除電極之示意圖 ... 120 圖3. 38 第五模態感測與濾除之初始與最佳化電極邊界圖(藍色虛線為初
始邊界,紅色實線為最佳邊界)... 120
xvii
符號表
T :應力
S :應變
D :電位移
E :電場
cE :定電場下的彈性係數
e :壓電係數
ε S :定應變下的介電係數
u :質點位移
ϕ :電位
b :徹體力
ρ :密度
L :線性運算子
,
E :
P :
D :
T :
B :
ω :自然頻率
Sσ :指定電荷邊界
S ϕ :指定電位邊界
xviii
Ss :金屬感測電極邊
ST :指定曳引力邊界
Su :指定位移邊界
ni :單位法方向
Y :導納
tˆ :指定曳引力
uˆ :指定位移
σˆ f :指定表面自由電荷密度
ϕˆ :指定電位
U :位移場
φ :電位場
I :電流
V :電壓
Q :電荷量
α0, :設計變數 αm :
βn :
S1
S :部分感測電極
S2
S :
S3
S :
xix
S4
S :
R f :負回授電阻 K :差動放大增益
g :目標函數
( )
xf :電極形狀函數
1
第一章 緒論
1.1 前言
振動現象是機械結構系統常遭遇的問題之一。大部分結構系統都不希望有振 動發生,振動會造成結構疲勞而破壞。因此如何消除或減少振動正是當前的課題。
為解決此一問題,通常利用感測器擷取結構振動所產生的信號,並回授到致動器 控制結構達到減震的效果。本文為利用壓電材料具有位移場與電場耦合之特性,
設計二維模態感測器模態。感測器是利用電極形狀設計與利用信號後處理來感測 所需感測模態的反應,濾除其餘模態的信號。相反地,也可以達到濾除某特定模 態之信號,而達到濾波的效果。如果能夠對每一個模態振動作控制,對於抑制系 統振動以及增進系統頻寬是非常重要的。而如何準確的完成感測某一模態或一組 模態正是此篇論文的研究目的。
1.2 文獻回顧
壓電材料之應用範圍相當廣泛,其具有機械能與電磁能耦合的複雜特性,難 以求得其解析解,在過去的文獻中,許多學者應用有限元素方法分析得到系統的 模態特性,並且利用此模型設計出模態感測器及致動器,可應用於模態感測、控 制及減振等方面。以下來回顧一些前人的研究成果。
在1990 年,由 C.-K. Lee 和 F. C. Moon[1]提出透過電極形狀之設計,來感測某 一個特定的模態,直接利用二維平板的模態作為其系統的模態,並未考慮電極形 狀及量測儀器的輸入阻抗對於系統模態的影響,因為電極形狀會影響系統模態,
忽略電極形狀的影響會使得設計出來的模態感測器有所偏差。
1991 年,Robert L. Clark 等人[2]考慮一維簡支樑,在不同位置貼上壓電致動器,
以激發出各種不同的模態,但其實驗結果無法確實分離各種模態,有其他模態混
2
入情形發生,並且信號相差不到十倍。
1994 年,H. S. Tzou 和 H. Q. Fu[3][4]在壓電平板上舖上長方形狀之電極,並探 討各種狀況之電極情況對控制之影響,其中並無設計電極形狀之概念,單純以改 變長方形電極之大小位置來討論,並得出對一完整覆蓋之電極,無法有效控制反 對稱模態之振動行為。
1997 年,Chang-Qing Chen 和 Ya-Peng Shen[5]在物體上劃分許多長方形範圍區 塊,並選擇性地在其上貼上壓電片,利用有限元素分析並推導得到各個壓電片之 電荷感測式,利用信號後處理加權各個壓電片之輸出,選擇一組增益,使其輸出 總合為一特定模態之信號。
1999 年,Dongchang Sun 和 Dajun Wang[6]在二維平板上分成許多區域貼上壓電 片並舖上電極,例如有M N* 個電極,則相對應就有M N* 條電荷感測式,可解出 前M N* 個模態,並忽略M N* +1之後高頻的模態,此方法利用信號後處理來達 到感測目的,並非考慮電極形狀來達到目標。同年,M. I. Friswell[7]藉由設計電極 形狀來達到感測一維簡支樑之模態,討論各種不同電極鋪設範圍,利用最佳化理 論,得到感測特定模態之電極之形狀與壓電材料之極化方向,文中提出可在同一 壓電片劃分出多個區域的電極分別感測不同模態。
2001 年,Hartono Sumali 和 Karsten Meissner 等[8] 在一維樑上分成多個區域貼 上鋪有電極的壓電片,推導出電荷量感測是。以信號後處理的方式,將各壓電片 的輸出信號加權後加總輸出,選擇不同組增益,感測不同的模態,如
圖 1. 1 所示。同年,Dongchang Sun 和 Liyong Tong [9]於二維平板上分成許多 區域貼上數片壓電片,推導出壓電片電極的電荷感測式,透過最佳化方法尋求最 理想的壓電片的尺寸及黏貼位置,將各電極信號加總以感測特定模態。同年,
Dongchang Sun 和 Liyong Tong [10] 接續文獻[9]之做法應用在薄殼結構上。
2008 年,Alberto Donoso 和Jose´ Carlos Bellido[11] 於薄圓板上覆蓋壓電 材料,在軸對稱的邊界條件下,推導出電荷感測式,並利用最佳化理論,得
3
到最佳壓電材料之極化方向輪廓,來感測特定模態。
以上文獻皆未考慮壓電材料的質量和勁度效應對於結構模態之影響,直接以 主結構之模態作為系統的模態,忽略壓電材料造成感測器效果與預期有所偏差。
本論文所設計的壓電複合結構模態感測器,透過有限元素法分析出含有壓電層的 結構模態,再藉此設計模態感測器,並不會因為覆蓋壓電材料後造成結構模態的 改變而影響感測器的效果。
1.3 本文內容
本文主要目的是在設計模態感測器,並配合後續之訊號處理,來感測或濾除 某特定模態。應用有限元素分析軟體ANSYS,分析一壓電複合結構之模態,並透 過數值分析軟體MATLAB 執行電極形狀之最佳化。
本文之內容分為下列幾部分:
第二章為主要說明壓電材料之特性與其模態分析,並說明利用模態正交特性 感測器只能應用在特殊限制下。並介紹電流模態感測器設計原理。
第三章是利用有限元素分析軟體ANSYS 分析一壓電結構之共振頻率與其模 態。並藉由數值分析軟體MATLAB 求得最佳電極形狀,來感測或濾除特定模態。
第四章是以第三章的設計方式以及微機電製程製作模態感測器與濾波器。並 呈現信號量測之結果。
第五章則是結論與建議。
4
第二章 模態感測器之設計
首先,我們由壓電材料本構方程式出發,再配合力平衡及電平衡方程式,得 到一組振動模態,包含位移模態及電位模態。推導物體在滿足自然邊界條件下,
其模態間必須滿足的正交特性,說明無法利用此正交特性來設計感測電極之形 狀。並說明本文如何透過感測電極的鋪設來設計模態感測器。
2.1 壓電體之模態分析
壓電材料之本構方程式為
k kij kl E ijkl
ij c S e E
T = − (2. 1)
j S ij kl ikl
i e S E
D = +ε (2. 2)
其中Tij 為應力,Skl為應變,Di表示電位移函數,E 表示電場,而k cijklE 、ekij 、εijS 分別表示物體的固定電場之彈性係數、壓電係數與固定應變之介電係數。
當物體變形量甚小時,我們可以把應變表示成線性應變,應變與位移ui關係 如下所示
(
i j ji)
ij u u
S , ,
2
1 +
= (2. 3)
電場與電位ϕ關係為
k
Ek =−ϕ, (2. 4)
並且考慮物體的力平衡方程式如下
i i j
ij b u
T , + =ρ && (2. 5)
其中b 為徹體力,i ρ 為密度,且考慮在相同頻率下,電磁波的波長較彈性波波長
5
大許多,可視為準靜態,則物體另外須滿足一靜電荷平衡方程式如下
,i =0
Di (2. 6)
將(2. 1)、(2. 2)帶入(2. 5)及(2. 6)式,並配合線性應變式(2. 3)和電場與電位關係式(2.
4)可得
i i kl kij lj k E
ijklu e b u
c , + ϕ, + =ρ && (2. 7)
, 0
,li − ijS ij =
k iklu
e ε ϕ (2. 8)
定義線性運算子L,E,P,D
(
k,l)
i E ijkl ju
x c e
Lu ˆ
∂
= ∂ (2. 9)
(
kil ,k)
i lx e e Eϕ ϕ ˆ
∂
= ∂ (2. 10)
(
ikl k,l)
i
u x e
∂
= ∂
Pu (2. 11)
(
,i)
S ij j
x ε ϕ ϕ ∂
− ∂
=
D (2. 12)
利用(2. 9)至(2. 12)可以將(2. 7)、(2. 8)式表示成
b 0 u 0
0 I u
D P
E
L =
⎭⎬
⎫
⎩⎨ +⎧
⎭⎬
⎫
⎩⎨
⎥⎧
⎦
⎢ ⎤
⎣ +⎡−
⎭⎬
⎫
⎩⎨
⎥⎧
⎦
⎢ ⎤
⎣
⎡
0 0 ϕ ρ
ϕ &&
&&
(2. 13)
即為
b 0 M u
A u =
⎭⎬
⎫
⎩⎨ +⎧
⎭⎬
⎫
⎩⎨ + ⎧
⎭⎬
⎫
⎩⎨
⎧
ϕ 0 ϕ
&&
(2. 14)
其中M和線性運算子A定義為
⎥⎦
⎢ ⎤
⎣
=⎡−
0 0
0 M ρI
(2. 15)
⎥⎦
⎢ ⎤
⎣
=⎡
D P
E
A L (2. 16)
6
物體運動行為須滿足(2. 14)式。
2.2 壓電系統之邊界條件
系統的邊界可由指定電荷邊界Sσ、指定電位邊界S 和金屬感測電極邊界ϕ Ss所 組成
Ss
S S
S = σ U ϕU (2. 17)
亦可分為指定曳引力邊界ST和指定位移邊界Su,表示如下
u
T S
S
S= U (2. 18)
定義線性運算子T 和B
i j k kij k l E
ijklu e n
c e
u
T( ,ϕ)=( , + ϕ, ) (2. 19)
i j S ij l k
iklu n
e )
( ) ,
(uϕ = , −ε ϕ,
B (2. 20)
其中ni為表面單位法方向。位移和電位須滿足邊界條件
⎪⎪
⎩
⎪⎪
⎨
⎧
=
=
=
=
∫Ss s
f
S t
YV dt dS
d
S S
on ) ( and )
, (
on ˆ
on ˆ ) , (
ϕ ϕ ϕ
ϕ ϕ
σ ϕ
ϕ σ
u B
u B
(2. 21)
( )
⎩⎨
⎧
=
=
u T
S S on ˆ
on ˆ u u
t u, T ϕ
(2. 22)
其中V 為感測電極之電壓,Y 為量測儀器的輸入導納,而tˆ,uˆ ,σˆ 和f ϕˆ 分別為指 定曳引力,指定位移,指定表面自由電荷密度與指定電位。使用導納無窮大的量 測儀器來測量感測電極之電流信號YV,反之使用導納趨近於零的量測儀器來測量 感測電極之電壓信號V 。
對應於(2. 14)式之特徵值問題為
7
2 =0
− MΦ
AΦ ω (2. 23)
其中
ω
為自然頻率,特徵函數Φ為位移場U與電位場φ所組成,表示如下:⎭⎬
⎫
⎩⎨
=⎧ φ
Φ U (2. 24)
若量測儀器之導納趨近於零,則相應的邊界條件為:
⎪⎪
⎩
⎪⎪⎨
⎧
=
=
=
=
∫Ss dS Ss
i
S S
on const.
and 0 ) , (
on 0
on 0 ) , (
φ φ
ω
φ φ
ϕ σ
U B
U
B (2. 25)
⎩⎨
⎧
=
=
u T
S S on
on ) , (
0 U
0 U T φ
(2. 26)
若量測儀器之導納趨近於無窮大,則相應的邊界條件為:
⎪⎩
⎪⎨
⎧
=
=
=
Ss
S S on 0
on 0
on 0 ) , (
φ φ
φ
ϕ
U σ
B
(2. 27)
⎩⎨
⎧
=
=
u T
S S on
on ) , (
0 U
0 U T φ
(2. 28)
由式(2. 25)、(2. 26)與(2. 27)、(2. 28)呈現出量測電壓或電流信號,使用不同的量測 儀器其輸入阻抗將改變系統的邊界條件,系統的模態也會不同。
令二特徵函數
⎭⎬
⎫
⎩⎨
⎧ η
f = F (2. 29)
⎭⎬
⎫
⎩⎨
⎧ ζ
g = G (2. 30)
基於材料對稱性:
E klij E jikl E ijlk E
ijkl c c c
c = = = (2. 31)
8
kji
kij e
e = (2. 32)
S ji S
ij ε
ε = (2. 33)
可推導出下列關係式(附錄 A)
∫
∫
∫
+ +
+ ⋅ − ⋅ + −
=
⋅
−
⋅
S u
T S S S S
S D
dS dS
d
ϕ
σ η ζ ζ η
η
ζ) ( , )] [ ( , ) ( , )]
, ( [
) (
F B G
B F
T G G
T F
x Af g Ag f
(2. 34)
將兩種不同系統的邊界條件式(2. 25)、(2. 26)或(2. 27)、(2. 28)分別代入上式,等號 右邊皆為零,這意味這兩個不同的系統皆為自伴隨系統(self-adjoint system),且可 推導出特徵函數Φr具有正交性質(附錄 B):
r D r ⋅ sd =δrsM
∫
Φ MΦ x (2. 35)2 r r D r ⋅ sd =−δrsM ω
∫
Φ AΦ x (2. 36)其中
ω
r和Mr分別為第r個模態之自然頻率和模態質量(modal mass)。由(2. 35)和(2.36)式可知壓電複合結構各模態間的正交性質為對全區域做體積分而成立。因為輸 出的信號來源為感測電極所收集到的自由電荷,是對部分表面做面積分,正交性 質無法應用於電極形狀之設計。因此理論上無法利用正交特性來設計形狀模態感 測器。
2.3 模態感測之設計
壓電體之運動可利用其模態做為基底函數來疊加表示如下
∑
⎭=
⎬⎫
⎩⎨
⎧
r
r r t
q ( )Φ (x) u
ϕ (2. 37)
壓電體的變形將產生電信號,可利用量測儀器測得。使用低輸入阻抗儀器來量測 感測電極上的電流信號,電流為感測電極收集到的總自由電荷對時間的導數,電 流感測式表示如下
9
∫
=
Ss dS
dt t d
I() B(u,ϕ) (2. 38) 將(2. 37)代入(2. 38)式可得
∑ ∫
=
Ss r r
r
r t dS
q t
I( ) & ( ) B(U ,φ ) (2. 39) 使用高輸入阻抗儀器來量測感測電極之電壓信號,電壓感測式表示如下:
∫
=
Ss dS
dt d t Y
V 1 ( , ) )
( Buϕ (2. 40)
將(2. 37)代入(2. 40)式可得
∑ ∫
=
Ss r r
r
r t dS
Y q t
V( ) 1 & ( ) B(U ,φ ) (2. 41) (2. 39)與(2. 41)提供了形狀模態濾波器的設計方向,無論是量電流或量電壓信 號,只要設計一個電極形狀使收集到第n個模態之電荷量為零,即為
0 ) ,
( =
∫
S n n dSs
U φ
B (2. 42)
則第n個模態之信號被濾除。量測得的信號為除第n個模態之外所有模態信號之 和,使用儀器量測得的電流信號
( )
=∑ ( ) ∫
( )k qk t S k k dS
t I
s
φ , U
& B ,n∉k (2. 43)
而電壓信號為
( )
= ∑( )
∫( )
k qk t S k k dS
t Y V
s
φ 1 ,
U
& B ,n∉k (2. 44) 即可達成濾波器之設計。若設計第m 個模態感測器,即只感測第m 個模態信號,
則設計一個電極形狀使得其餘模態的電荷量為零,即 0
) ,
( =
∫
S p p dSs
φ U
B , ∀ p≠m (2. 45)
來完成感測器之設計。量測得的信號僅有第m 個模態信號,使用儀器量測得的電 流信號
( )
t q( )
t( )
dSI
Ss m m
m
∫
= & BU ,φ (2. 46) 而電壓信號為
10
( )
q( )
t( )
dSt Y V
Ss m m
m
∫
=1 ,φ
U
& B (2. 47)
由(2. 45)式知,要濾除第m 個模態以外的所有模態信號是難以達成的。但實際上,
振動信號其頻率是有範圍的,感測一模態只須考慮濾除在一定範圍內其餘的模 態。所以利用此方法來設計模態感測器是可行的。
使用電壓信號量測之模態感測器,量測感測電極輸出的電壓值,量測儀器的 輸入阻抗為無限大。在決定好電極形狀後,每個部分電極分別設等電位,並設定 系統的其餘邊界條件後,求取該系統的模態解。模態解對應在感測電極上的電壓 值即為該模態相對的信號大小。如果恰好所要感測的模態有信號外,其餘模態的 信號為零,則此電極形狀即為想要的模態感測器設計。但是一般情況並不會如此 恰好,假使其餘模態有信號,就須要再改變電極形狀,但一旦改變之後,系統的 模態就會因為邊界條件改變而改變。那就必須再重新分析新系統的模態解,經過 迭代後,直到除了須要感測的模態有信號外,其餘模態沒有信號就可得到正確的 模態感測器。因為須要透過不斷的迭代來修正電極形狀,所以這並不是一個很好 的方法。
本論文使用電流信號量測之模態感測器,即量測感測電極輸出的電流值,當 量測儀器輸入阻抗為零時,這個系統的感測電極邊界條件為電壓邊界條件
ϕ = 0
。 採用朱家輝(2002)[12]提出的方式,如圖2. 1 表面佈滿電極的設計,假設中間切割線 之線寬很小,其影響可忽略不計。利用設計切割線的方式,可以將電極分成多個 部分,每個部分分別量測不同的信號。由於電性邊界條件並不因為分隔線設計感 測電極形狀而有所改變,所以系統的模態並不會因為設計感測電極形狀而和原先 所分析的系統模態有所不同。設計的流程就變成先分析全部鋪滿電極且電極電位 為零的系統模態解,再來設計感測電極的形狀。使用電壓信號量測並不能採用切 割線方式設計,因為切開來的電極分別為等電位與全電極為等電位的邊界條件有 所不同,系統模態就會改變。11
第三章 實例分析與討論
為設計電流模態感測器,使用有限元素套裝軟體ANSYS,來模擬一壓電複合 結構的振動位移模態,以及電位移模態用來計算各個模態之電荷量。另一方面,
利用有限元素分析的結果,透過數值分析軟體MATLAB 來執行電極形狀最佳化的 數值問題,藉此得到最佳的感測電極形狀。
但是ANSYS SOLID 5 元素無法輸出電流信號,只能給每個節點的電位移值,
另外利用高斯數值積分法計算總電荷量。
3.1 有限元素分析
考慮一壓電複合結構為一塊長120mm寬30mm厚2mm之鋁板上黏貼一片長度 mm
L=46 寬度w=30mm厚度t=511µm之壓電片,如圖2. 1 所示,座標設定 x-y 平面為鋁板與壓電片之介面而z 軸指向上。壓電片長度範圍為x=0到x=46mm, 鋁板固定端與壓電片間隔2mm。由於此問題不易求得解析解,因此將利用有限元 素分析軟體ANSYS,得到節點相對應之數值解。模擬所使用的元素為 SOLID 5,
此元素具分析3 D 行為並有彈力、電磁力和溫度的耦合特性,可以用來分析壓電 複合結構的振動行為。
鋁板左端(x=−2 mm)為固定端,設定左端的 x、y、z 三個方向之位移皆為零。
鋁板電位設為零。假設在壓電板上表面所鍍的金屬電極很薄,忽略其力學效應。
本文所設計的為電流模態感測器,因此壓電片上面的電性邊界條件設電位為零。
壓電材料為PZT-FT3,鋁板為鋁合金 6061 材質,材料常數見附錄 C。鋁合金之壓 電耦合係數設為零,相對介電係數設為109。鋁板和壓電片皆使用SOLID 5 元素來 分析。壓電片之元素長寬高為0.5mm×0.5mm×0.255mm,鋁板之元素長寬高為
mm mm
mm 0.5 0.4 5
.
0 × × ,共有83040 個元素。
感測電極收集到第r個模態之電荷量Qr 表示如下
12
∫
∫
==
s
s r S r
S r
r dS D dS
Q B(U ,φ ) ( 3) (3. 1)
其中(D )3 r代表第r個模態相應於壓電片上表面電位移之z分量,(3. 1)式稱為電荷 感測式,此積分式利用高斯求積式做計算。每個模態正規化於單位模態質量。
分析求解前五模態。第一、二、五模態其位移場對稱於x-z 平面,第三、四模 態之位移場為反對稱情形,如圖3. 2 至圖 3. 6 ,電位移之z分量如圖3. 7 至圖 3. 11 所示,表3. 1 列出結構之前五個自然頻率值。
3.2 單功用感測電極與分析結果
本文所設計的模態感測與模態濾除器,方法建立於感測電極所收集到某些模 態的表面自由電荷量為零,利用最佳化方法來設計此電極的幾何形狀。目的為改 變壓電片上感測電極SS的形狀,如圖3. 12,來達到感測或濾除某一振動模態,所
以可以選擇一組基底函數,來組合表示出電極形狀邊界函數 f
( )
x ,如下所示∑
∑
= =+ +
= 2
1 2
1 0
sin2 cos2
) (
n n m
m L
x n L
x x m
f α α π β π (3. 2)
其中α0,αm和βn為設計變數。
利用最佳化方法尋找在滿足限制條件下使目標函數有極小值之最佳設計變數 α0,αm和βn,並且得到最佳感測或濾除之電極形狀。執行最佳化的數值問題前須 定義所要執行的目標函數與限制條件。設計感測特定模態電極時,目標函數式可 定義如下
p i
i
Q Q g
∑
= (3. 3)
其中p 代表該特定模態,i為其它模態,且限定感測特定模態之電荷量如下
≥50
Qp (3. 4)
若設計濾除特定模態電極,目標函數可直接將(3. 3)式取倒數表示如下
13
=
∑
i i p
Q
g Q (3. 5)
欲濾除的特定模態之電荷量限制條件為
≤50
Qp (3. 6)
為了分別感測或濾除這五個模態之信號,藉由電極形狀的規劃與信號後處理,設 計了五款不同的電極來因應各需求。
3.2.1 第一模態感測
第一模態在壓電片上面之z 方向電位移分佈如圖 3. 2 所示,對稱於 x-z 平面且 全為同號。為了達成第一模態感測器之設計,必須同時濾除掉其餘四個模態的信 號,較為困難。這裡使用A 款電極來設計第一模態感測電極,A 款電極是由對稱 於x-z 平面的兩條曲線 f
( )
x 和− f( )
x 將電極劃分成三個部分電極S ,S1 S 及S2 S ,S3 如圖3. 13 所示,利用信號後處理將感測電極S 與S1 S 收集到的信號減去感測電極S3S2
S 收集到的信號得到想要的信號。
由於本文採用的是電流信號模態感測器,必須使用零阻抗的信號量測電路來 量測電流信號,可以利用OP 的負回授電路設計,來使得輸入端的電位維持在零電 位,這在OP 電路設計中稱作虛擬接地(virtual ground)。由於是電流信號,為了之 後做處理方便,要轉成高阻抗的電壓信號,需要一個稱做跨阻抗放大器
(transimpedance amplifier)的電路,這個電路的標準型式如圖 3. 14。輸出的電壓信 號V
( )
t 與電流i( )
t 關係式為( )
t R i( )
tV =− f (3. 7)
其中R 稱為負回授電阻。利用電線連接感測電極f S 與S1 S 並接到跨阻抗放大器將S3 其電流信號ia 轉換成電壓信號Va,而感測電極
S2
S 直接接到另一個跨阻抗放大器
14
將其電流信號ib轉換成電壓信號Vb,再利用差動放大器將兩電壓信號Va和Vb做相 減,如圖3. 15 所示,最後輸出的電壓信號Vo為
b b a a
o AV AV
V = + (3. 8)
其中 ⎟⎟
⎠
⎜⎜ ⎞
⎝
⎛
⎟⎟ +
⎠
⎜⎜ ⎞
⎝
⎛ +
=
4 3
4 1
1 2
R R
R R
Aa R , ⎟⎟
⎠
⎜⎜ ⎞
⎝
⎛−
=
1 2
R Ab R 。
當R1 = R3 =R且R2 =R4 =KR,則(3. 8)式寫成
(
b a)
o KV V
V = − (3. 9)
利用(3. 7)式可將(3. 9)式整理得
(
a b)
f
o KR i i
V = − (3. 10)
K稱為差動放大增益,最後出輸電壓信號為感測電極S 與S1 S 的電流值減去感測S3 電極S 的電流值再乘上增益S2 KR ,此電路一般稱為平衡差動放大器f
( Aa = Ab =K)。
由於感測電極形狀為對稱,將消除反對稱模態所貢獻之電荷量,可利用於對 稱模態之感測設計,以簡化問題。電荷感測式(3. 1)可表示如下
∫
∫
∫
− +=
3 2
1
) ( )
( )
( 3 3 3
S S
S S
r S
r S
r
r D dS D dS D dS
Q (3. 11)
即
∫ ∫
∫ ∫
∫ ∫
− − + −−= L wf x r
L f x
x
f r
L w
x
f r
r D dydx D dydx D dydx
Q 0
) (
2 0 3
) (
)
( 3
0 2
)
( ( 3) ( ) ( ) (3. 12)
為確保電極形狀邊界不過於靠近壓電片邊緣造成斷路,限制曲線 f
( )
x 與壓電片邊緣至少有1mm以上的距離,每款電極均有形狀限制條件如下
15
( )
1414≤ ≤
− f x (3. 13)
實作時量測用的信號線將從壓電片左端接出,如圖3. 16,為避免感測電極S 接線S2 處過窄,限制接線處之寬度大於等於10mm,加入電極形狀限制條件如下
( )
0 ≥5f (3. 14)
由於對稱電極將消除反對稱模態之電荷量,只要再規劃出電極形狀來濾掉第 二與第五模態的電荷量,即可完成第一模態感測器的設計。第一模態感測
(p= i1 , ∈
( )
2,5 )之目標函數可由(3. 3)式簡化為1 5
Q2
g Q
+Q
= (3. 15)
配合數值分析軟體Matlab 使用拉格郎治-牛頓法(Lagrange-Newton method)來執行 最佳化,求解在滿足電極形狀限制條件(3. 13)和(3. 14)式以及電荷量限制條件
1≥50
Q 式下,目標函數(3. 15)式有極小值時之最佳化結果如表 3. 2,初始設計變數 為任意設定。由結果知,若不考慮更高頻模態的貢獻,第二、五模態相對第一模 態電荷量約差五十萬倍以上,所以將只感測到第一模態。其最佳電極形狀如圖3.
17。
3.2.2 第二模態感測
第二模態在壓電片上面之z 方向電位移對稱於 x-z 平面,其分佈如圖 3. 8 所 示。採用A 款電極來設計第二模態感測電極。由於對稱電極將消除反對稱模態之 電荷量,所以第二模態感測(p= i2, ∈
( )
1,5 )之目標函數為以下所表示2 5 1
Q Q
g=Q + (3. 16)
問題簡化成利用C 款電極設計,濾除第一與第五模態之信號即可。求解在滿足電 極形狀限制條件(3. 13)和(3. 14)式以及電荷量限制條件Q2≥50式下,目標函數(3. 16)
16
式有極小值時之最佳化結果如表3. 3。其最佳電極形狀如圖 3. 18。
3.2.3 第三模態感測
第三模態在壓電片上面之z 方向的電位移值反對稱於 x-z 平面,如圖 3. 9 所 示。利用B 款電極來設計第三模態感測電極,B 款電極是由對稱於 x-z 平面的兩條 曲線 f
( )
x 和− f( )
x 與直線y = 0
將電極劃分成四個部分電極,皆為感測電極,如圖 3. 19 所示,信號為感測電極S 與S1 S 所收集到的信號減去感測電極S3 S 與S2 S 所收S4 集到的信號。B 款電極為反對稱電極,將消除對稱模態所貢獻之電荷量,可利用於 反對稱模態之感測設計,以簡化問題。可將電荷感測式(3. 1)改寫成
∫
∫
∫
∫
− + −=
4 3
2 1
) ( )
( )
( )
( 3 3 3 3
S S
S
S S
r S
r S
r S
r
r D dS D dS D dS D dS
Q (3. 17)
即為
∫ ∫
∫ ∫
∫ ∫
∫ ∫
−
−
− −
+
−
= L f x
w r
L x
f r
L f x
r
L w
x
f r
r
dydx D
dydx D
dydx D
dydx D
Q
0 ) (
2 0 3
0 )
( 3
0 ) (
0 3
0 2
)
( 3
) ( )
(
) ( )
(
(3. 18)
為避免感測電極S 與S2 S 信號線接線處過窄,限制接線處之寬度大於 5mm,加入S3 電極形狀限制條件
( )
0 ≥5f (3. 19)
反對稱電極將消除對稱模態之電荷量,第三模態感測(p = i3, = 4)之目標函數 可表示為
3 4
Q
g=Q (3. 20)
利用 E 款電極設計反對稱模態感測器可大為簡化問題,只須再規劃出電極形狀濾 除另一個反對稱模態信號即可。求解在滿足電極形狀限制條件(3. 13)和(3. 19)式以
17
及電荷量限制條件Q3≥50式下,目標函數(3. 20)式有極小值時之最佳化結果如表 3. 4。其最佳電極形狀如圖 3. 20。
3.2.4 第四模態感測
第四模態其在壓電片上層之 z 方向電位移反對稱於 x-z 平面,其分佈如圖3. 10 所示,。採用 B 款電極來設計第四模態感測電極。由於反對稱電極將消除對稱模 態之電荷量,所以第四模態感測(p = 4,i=3)之目標函數可表示為
4 3
Q
g=Q (3. 21)
利用 E 款的設計,尋找出一電極形狀濾除第四個模態信號即可。求解在滿足電極 形狀限制條件(3. 13)、(3. 19)式以及電荷量限制條件Q4≥50式下,目標函數式(3. 21) 有極小值時之最佳化結果如表3. 5。其最佳電極形狀如圖 3. 21。
3.2.5 第五模態感測
第五模態其在壓電片上層之z 方向電位移對稱於 x-z 平面,其分佈如圖 3. 11 所示。採用A 款電極來設計第五模態感測電極。由於對稱電極將消除反對稱模態 之電荷量,所以第五模態感測(p= i5, ∈
( )
1,2 )之目標函數可表示為5 2 1
Q Q g Q +
= (3. 22)
求解在滿足電極形狀限制條件(3. 13)和(3. 14)式以及電荷量限制條件Q5≥50式 下,目標函數(3. 22)式有極小值時之最佳化結果如表 3. 6。其最佳電極形狀如圖 3.
22。
3.2.6 第一模態濾除
由於第一模態的電位移值全為同號,無法單用電極形狀的設計來將其信號濾 除,必須藉由信號後處理來將第一模態信號濾除(p= i1, ∈