國立交通大學
電控工程研究所
碩 士 論 文
柱狀透鏡之即時裸視立體顯像操控之實現
A Realization of Manipulation on Real-time
Naked-eye 3D Vision Based on Lenticular Lenses
研 究 生 :黃則銘
指 導 教 授 :林昇甫 博士
柱狀透鏡之即時裸視立體顯像操控之實現
A Realization of Manipulation on Real-time Naked-eye 3D
Vision Based on Lenticular Lenses
研 究 生 :黃則銘
Student: Tse-Ming Huang
指 導 教 授 :林 昇 甫 博士
Advisor: Dr. Sheng-Fuu Lin
國立交通大學
電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering
National Chiao-Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering June 2011
Hsinchu, Taiwan, R.O.C 中華民國一百年七月
柱狀透鏡之即時裸視立體顯像操控之實現
學生:黃則銘 指導教授:林昇甫 博士國立交通大學電控工程研究所 碩士班
摘要
近年來立體顯示技術蓬勃發展,尤其是在電影娛樂上,立體顯示更是一股潮 流。但是我們觀賞 3D 畫面時,通常需要戴上一副 3D 眼鏡,戴久後常常會造成 不適感。另外,現今醫生在替病患診斷頸部腫瘤時,是以雙手直接去按壓發病部 位做觸診,若是能配合一個頸部周圍的 3D 空間結構模型來診斷,將有助於醫生 及病人對病情的了解。而目前學術上研究 3D 建模的文獻通常都侷限在 2D 畫面 中的虛擬 3D,而不是實際的 3D 畫面。有鑑於此,本篇論文實現了一個即時裸 視立體顯像操控程式做為應用例,建造了虛擬 3D 物體,三維空間任意視角轉動、 橫切面截取輪廓線以及物件個別分離觀看等功能,最後並將此虛擬 3D 物體以裸 視 3D 的方式顯像出來。本論文貢獻如下所述,首先,本論文將此套裸視立體顯 像操控架構實現出來,為往後的生醫研究者提供了一個應用例可供參考或套用。 第二,本論文將此操控程式的輸出畫面結合裸視 3D,提供使用者一個嶄新的立 體視覺效果,跳脫出傳統的 2D 畫面。第三,除了據有深度資訊的裸視 3D 模型 外,此應用例程式還有另外建立對應的平面虛擬 3D 模型,使用者能夠依據上述 的操作功能,將兩種影像同時做仔細的檢查與比對,增加使用者對建立模型的三 維空間結構和排列情形更加了解。 關鍵字:裸視 3D、柱狀透鏡、立體顯像A Realization of Manipulation on Real-time
Naked-eye 3D Vision Based on Lenticular Lenses
Student: Tse-Ming Huang Advisor: Dr. Sheng-Fuu Lin
Institute of Electrical Control Engineering
National Chiao Tung University
ABSTRACT
3D stereoscopic technology has been developing vigorously in recent years. Especially in movie entertainment, 3D stereoscopic technology is a trend. We usually need to wear a pair of 3D glasses when we watch the screen. However, after wearing for a long time, we often feel uncomfortable. Besides, in the diagnosis of cancer for patients, doctors often use their hands directly to press the diseased part of human body such as neck. If the diagnosis of cancer can operate with a 3D structure model around the diseased part, doctors and patients will understand the disease easily. Besides, academic literatures for constructing 3D model are usually limited in 3D virtual environment rather than 3D stereoscopy. In view of above, we realize a manipulation on real-time naked-eye 3D vision program based on lenticular lenses and use the program as an application example. In this program, we construct two virtual 3D objects, and we can control these objects doing arbitrary angle rotation in three dimensional space, intercepting their contours and separating the objects individually.
The contributions of this paper could be summarized as follows. First, in this paper, we realize the manipulation on real-time naked-eye 3D vision program, and we use the program as an application example for future biomedical researchers to refer or apply. Second, in this paper, we combine naked-eye 3D vision with the output of the program, providing users with a new three dimensional visual effect rather than traditional two dimension vision. Third, in addition to constructing naked-eye 3D models owning depth information, we also construct the corresponding 2D models in this program. Therefore, with operating the interface’s functions described in above ,
users are able to carefully examine and compare the two kinds of models at the same time. Then, the users will more understand the 3D space structure of the models.
誌
謝
首先要以最誠摯的謝意,感謝我的指導教授林昇甫博士,感謝他在研究上的 啟迪與指導,以及細心校閱本論文的謬誤之處。同時也要感謝本實驗室的學長膽 哥、爆肝、阿清、阿牛、大雄、佳興和國育;一起同甘共苦的同學阿達、勁成和 御筆以及學弟們,由於他們熱心的協助與討論,使得研究過程中的困境能夠迎刃 而解。還要感謝我的女友配紅,與我從研究所開始一路互相扶持、共同追求進步、 一起成長。 最後要感謝我親愛的父母和哥哥,感謝他們的養育之恩以及在我求學生涯中 給我最大的鼓勵與支持,使我得以在精神與生活上無後顧之憂,順利完成學業。目錄
中文摘要……... i 英文摘要... ii 誌謝... iv 目錄... v 表目錄... vii 圖目錄... viii 第一章 緒論... 1 1.1 相關研究... 3 1.1.1 歷史背景... 3 1.1.2 應用層面... 7 1.2 研究動機... 8 1.3 論文貢獻... 10 1.4 論文架構... 11 第二章 相關知識及理論... 12 2.1 人體雙眼立體視覺... 12 2.1.1 立體視覺的成因... 12 2.1.2 深度感生成形式... 16 2.1.3 雙眼畫面的深度資訊... 19 2.2 左右眼畫面差異輸出... 20 2.2.1 明暗眼鏡... 21 2.2.2 紅藍(綠)眼鏡 ... 22 2.2.3 色碼眼鏡... 23 2.2.4 偏光眼鏡... 24 2.2.5 快門眼鏡... 28 2.3 多視角(視點)影像輸出 ... 29 2.3.1 視差屏障式... 30 2.3.2 柱狀透鏡式... 32 2.3.3 指向光源式... 33 2.4 其它 3D 成像技術 ... 34 2.4.1 頭盔 3D 顯示器 ... 34 2.4.2 全息攝影... 35 2.4.3 體積式 3D 技術 ... 37 2.4.4 多平面式 3D 技術 ... 372.5 柱狀透鏡式裸視 3D 技術與原理 ... 38 第三章 柱狀透鏡式之即時裸視立體顯像操控程式... 43 3.1 系統架構與設計... 46 3.1.1 系統設計概述... 46 3.1.2 OpenGL 與 DirectX ... 48 3.2 基於 MATLAB 之即時裸視立體顯像操控程式 ... 49 3.2.1 程式設計... 50 3.2.2 動態連結程式庫... 54 3.3 基於 C 語言之即時裸視立體顯像操控程式 ... 55 3.4 幾何基礎多視角影像合成系統... 58 3.5 裸視 3D 硬體輸出端 ... 60 第四章 裸視立體顯像之實現與討論... 61 4.1 系統實現結果... 61 4.1.1 基於 MATLAB 之即時裸視立體顯像操控程式 ... 61 4.1.2 基於 C 語言之即時裸視立體顯像操控程式 ... 68 4.1.3 幾何基礎多視角影像合成系統與硬體輸出端... 71 4.2 視角測試設計與討論... 75 4.3 立體顯像操控實現討論... 93 第五章 結論與未來發展... 95 參考文獻... 97
表目錄
表 4.1 3D 影像的尺度。 ... 76 表 4.2 垂直 0各位置點(定點)裸視 3D 觀察效果。 ... 78 表 4.3 垂直上下 0至 30各位置(區域範圍)裸視 3D 觀察效果。 ... 78 表 4.4 垂直上下 30各位置點(定點)裸視 3D 觀察效果。 ... 79 表 4.5 垂直上下 30至 45各位置(區域範圍)裸視 3D 觀察效果。 ... 79 表 4.6 垂直上下 3045各位置(定點)裸視 3D 觀察效果。 ... 80 表 4.7 垂直上下 45至 60各位置(區域範圍)裸視 3D 觀察效果。 ... 80 表 4.8 垂直上下 60各位置(定點)裸視 3D 觀察效果。 ... 81 表 4.9 垂直上下 60至 90各位置(區域範圍)裸視 3D 觀察效果。 ... 81圖目錄
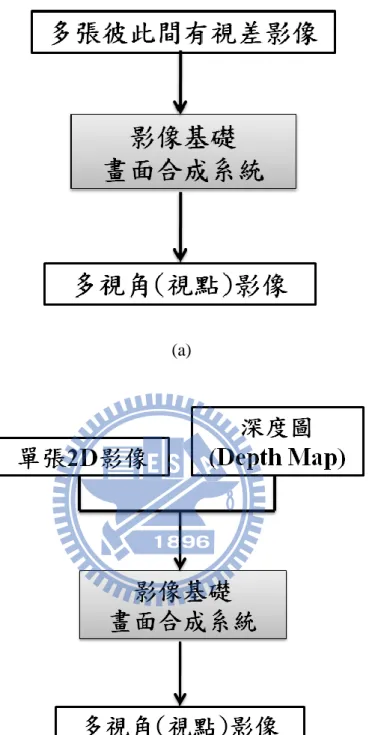
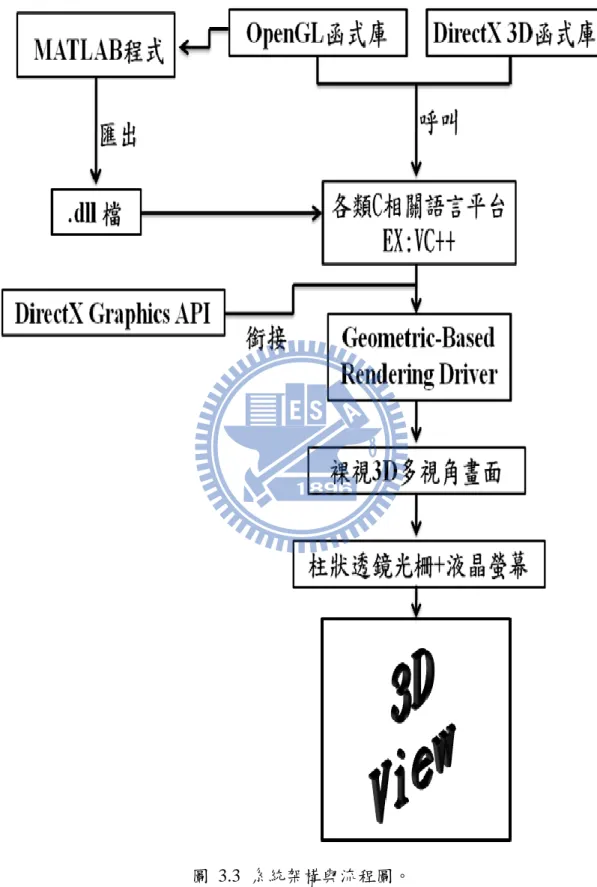
圖 1.1 3D 顯示技術統整圖。 ... 2 圖 1.2 達文西所繪雙眼視覺圖... 3 圖 1.3 恩波里所繪雙眼視差圖。... 4 圖 1.4 惠斯通立體鏡。(a)裝置實體圖 (b)裝置示意圖。 ... 4 圖 1.5 布魯斯特立體鏡。(a)裝置實體圖 (b)裝置示意圖。 ... 5 圖 1.6 第一張左右眼視覺照片圖。... 6 圖 2.1 3D 顯示技術依輸出原理分類圖。 ... 13 圖 2.2 雙眼視覺與視角示意圖。... 14 圖 2.3 視差示意圖。... 14 圖 2.4 運動視差的原理示意圖。(a)朝向人眼的月亮(前景)和太陽(後景) (b) 人向右移動 (c)人向左移動 (d)遠景物定位。... 15 圖 2.5 交錯視差示意圖。... 17 圖 2.6 零視差示意圖。... 17 圖 2.7 非交錯視差示意圖。... 18 圖 2.8 極線平面示意圖。... 19 圖 2.9 明暗眼鏡。... 21 圖 2.10 紅藍眼鏡。... 22 圖 2.11 紅綠眼鏡。 ... 22 圖 2.12 紅藍眼鏡影像畫面。... 22 圖 2.13 色碼眼鏡。... 23 圖 2.14 色碼眼鏡影像畫面。... 23 圖 2.15 光波通過垂直偏光膜示意圖。... 24 圖 2.16 光波通過線型偏光眼鏡示意圖。... 25 圖 2.17 線型偏光眼鏡。... 25 圖 2.18 液晶顯示器影像通過線型偏光眼鏡示意圖。... 26 圖 2.19 液晶顯示器影像通過環型偏光眼鏡示意圖。... 27 圖 2.20 環型偏光眼鏡。... 27 圖 2.21 快門眼鏡。... 28 圖 2.22 快門眼鏡成像原理示意圖。... 29 圖 2.23 視差屏障式成像原理示意圖。... 30 圖 2.24 視差屏障式 2D 和 3D 互相轉換示意圖。 ... 31 圖 2.25 柱狀透鏡式成像原理示意圖。... 32 圖 2.26 指向光源式成像原理示意圖。... 33 圖 2.27 頭盔顯示器。... 34圖 2.28 魔術 Pepper's ghost 效果示意圖。(a)左方房間開燈 (b)左方房間關燈 (c)左方房間燈由亮變暗。 ... 35
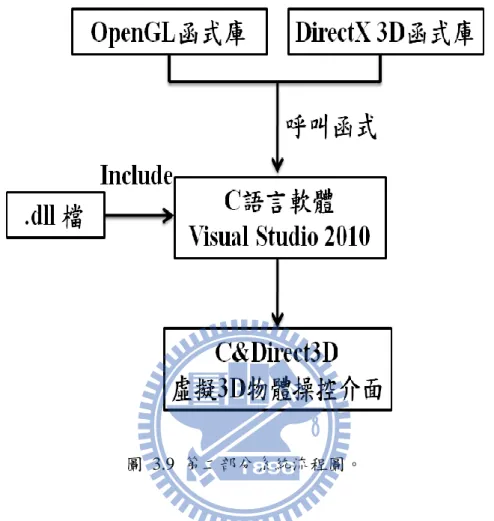
圖 2.29 頭盔顯示器。... 37 圖 2.30 兩個視角(two-view)視覺區域圖。 ... 38 圖 2.31 五個視角(five-view)。(a)視覺區域圖 (b)拍攝示意圖。 ... 40 圖 2.32 觀賞者距離位置與 3D 顯像效果關係示意圖。 ... 41 圖 3.1 影像基礎 3D 畫面製作流程。(a)多張視差影像合成法 (b)DIBR 法。 ... 44 圖 3.2 幾何基礎 3D 畫面製作流程。 ... 45 圖 3.3 系統架構與流程圖。... 47 圖 3.4 OpenGL 與 DirectX 分類示意圖。 ... 48 圖 3.5 第一部分系統流程圖。... 49 圖 3.6 基於 MATLAB 之即時互動式多功能操控介面設計圖。 ... 50 圖 3.7 虛擬 3D 模型圖。(a)兩組虛擬 3D 模型 (b)一組頸部虛擬模型。 .... 51 圖 3.8 DLL 檔結構流程圖。 ... 56 圖 3.9 第二部分系統流程圖。... 57 圖 3.10 基於 C 語言之即時互動式多功能操控介面圖。 ... 58 圖 3.11 第三部分系統流程圖。 ... 60 圖 3.12 幾何基礎多視角影像彩現流程圖。... 60 圖 3.13 第四部分系統流程圖。... 61 圖 4.1 基於 MATLAB 測試介面執行後初始畫面。 ... 62 圖 4.2 基於 MATLAB 創建的模型。(a)第一組 (b)第二組 (c)頸部。... 62 圖 4.3 橫切面輪廓圖(level 值為 60)。(a)第一組 (b)第二組 (c)頸部。... 63 圖 4.4 橫切面輪廓圖(level 值為 90)。(a)第一組 (b)第二組 (c)頸部。... 64
圖 4.5 三個物件個別單一分離圖。(a)(b)(c)第一組 (d)(e)(f)第二組 (g)(h)(i) 頸部。 ... 65 圖 4.6 三個物件全部分離圖。(a)第一組 (b)第二組 (c)頸部。 ... 66 圖 4.7 三個物件個別單一旋轉圖。(a)第一組 (b)第二組 (c)頸部。 ... 66 圖 4.8 三個物件同時旋轉圖。(a)第一組 (b)第二組 (c)頸部。 ... 67 圖 4.9 基於 C 語言創建的模型。(a)第一組 (b)第二組 (c)頸部。 ... 68 圖 4.10 橫切面輪廓圖。(a)第一組 (b)第二組 (c)頸部。 ... 69 圖 4.11 三個物件全部分離圖。(a)第一組 (b)第二組 (c)頸部。 ... 69
圖 4.12 三個物件個別單一分離圖。(a)(b)(c)第一組 (d)(e)(f)第二組 (g)(h)(i) 頸部。 ... 70 圖 4.13 三個物件同時旋轉圖。(a)第一組 (b)第二組 (c)頸部。 ... 71 圖 4.14 三個物件個別單一旋轉圖。(a)第一組 (b)第二組 (c)頸部。 ... 71 圖 4.15 驅動程式設定圖。(a)效能設定 (b)路徑設定。 ... 72 圖 4.16 即時轉換九個不同視角圖。(a)第一組 (b)第二組 (c)頸部。 ... 72 圖 4.17 合成後的多視角畫面圖(整體)。(a)第一組 (b)第二組 (c)頸部。 .... 73 圖 4.18 合成後的多視角畫面圖(物件分離後)。(a)第一組 (b)第二組 (c)頸部。
... 73 圖 4.19 可拆卸式柱狀透鏡光柵組裝圖。(a)光柵固定架 (b)可拆卸柱狀透鏡 光柵 (c)光柵上的柱狀條紋 (d)光柵與螢幕接合 (e)整體完成圖。 . 74 圖 4.20 視角測試觀察點三維空間定點位置設置圖... 75 圖 4.21 實驗測試水平面各定點位置圖。(a)第一組 50cm (b)第一組 100cm (c) 第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。 ... 82 圖 4.22 實驗測試螢幕左向角度 30各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 83 圖 4.23 實驗測試螢幕左向角度 45各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 84 圖 4.24 實驗測試螢幕左向角度 60各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 85 圖 4.25 實驗測試螢幕上方角度 30各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 86 圖 4.26 實驗測試螢幕上方角度 45各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 87 圖 4.27 實驗測試螢幕上方角度 60各定點位置圖。(a)第一組 50cm (b)第一 組 100cm (c)第一組 150cm (d)第一組 200cm (e)第二組 50cm (f)第二 組 100cm (g) 第二組 150cm (h)第二組 200cm (i)頸部 50cm (j)頸部 100cm (k)頸部 150cm (l)頸部 200cm。... 88 圖 4.28 本論文系統裸視 3D 顯像效果圖(與螢幕距離皆為 50cm~200cm 且垂 直上下 0至 90)。(a)螢幕左向 0至15 (b)螢幕左向15至 30(圖以 (a)為基準順時針轉動 30以方便觀看) (c)螢幕左向 30至 45(圖以(a) 為基準順時針轉動 30以方便觀看) (d)螢幕左向 45至 60(圖以(a) 為基準順時針轉動 60以方便觀看) (e)螢幕左向 60至 90。 ... 90
第一章
緒論
回顧人類通訊與資訊傳播的發展歷史紀錄,史前人類曾在洞窟裡留下壁畫, 經歷史學家研究過後,我們知道人類在西元前一萬七千年就會用顏料繪畫來紀錄 信仰與生活了。後來,西元前3500年左右,定居在現今伊拉克南部美索不達米亞 帄原的蘇美爾人,發明了世界上最早的象形文字。為了加速人類對資訊的傳遞與 歷史的紀載,人類需要更直觀且易明瞭的方式來紀錄大量的史實和資訊,於是人 類於通訊領域做不斷的發明與創新。西元1897年,映像管顯示器(CRT映像管電 視)正式問世,將以往靜態文字傳播的模式,轉為動態影音的傳播形式,為人類 生活帶來重大改變。從此以後,資訊以大量傳遞的形式,並將文字難以形容的事 物,轉為能夠以輕易、迅速傳播且較為完整的動態資訊,打破了空間的藩籬,連 接了時空的斷點,因而映像管顯示器可說是帶來第一波資訊革命。然而自從CRT 映像管電視發明以後,經歷了黑白電視(black white TV)、彩色電視(color TV), 一直到高畫質電視(high definition TV),人類對於視覺上的饗宴做了一次又一次 的革新,但是帄面顯示器能提供的資訊和畫面滿足不了人類的欲望,於是近幾年 來3D顯示器,開始蓬勃發展,各家廠商無不投入大量人力和財力下去做研究, 從最早需要戴上配合顯視器的3D眼鏡技術(stereoscopic display system)[1],到不 需要配戴3D眼鏡的裸視3D顯示技術(autostereoscopic display system)[2],人類一直 都在追求著更自然、逼真且與符合我們雙眼所見真實且實際的影像資訊。根據文獻[1] [2] [3]的論述,經統整後以樹狀圖架構方式呈現發展至今的主流 3D 顯示技術,如圖 1.1 所示,白框部分代表各層級分類;黑框代表已經發展出來的 技術。然後,1.1 節將介紹 3D 顯示技術的發展情形與經過,1.1.1 節先介紹 3D 顯示技術發展的歷史背景;1.1.2 節則介紹 3D 顯示技術的應用層面與未來發展; 1.2 節將說明本論文研究基於柱狀透鏡式之即時裸視 3D 多功能操作介面的動機 與目的;1.3 節概述本論文的架構,1.4 節說明本論文之貢獻。 圖 1.1 3D 顯示技術統整圖。
1.1 相關研究
3D 顯示技術從十五世紀發展自今,種類繁多,有許多通用的主流理論, 也有許多科學家各自研發的儀器,並有自己的特別技術,這些研究不外乎是把最 真實的影像以立體方式再次呈現在世人面前。1.1.1 歷史背景
3D 一詞英文為 three dimension,即是指三維空間,也就是人類雙眼實際所 見的三度空間。3D 貣源最早可以追溯到西元前三世紀時的古希臘哲學家,同時 也是古典幾何學之父歐基里得(Euclid),他早在兩千多年前就寫下「To see in relief is to receive by means of each eye the simultaneous impression of two dissimilar images of the same object」這段話[4],表示出左、右眼看同一物體時,左右兩個 畫面不同這個事實。到了西元 1500 年左右,義大利文藝復興時期的天才藝術家 兼科學家達文西(Leonardo da Vinci)對於雙眼視覺現象方面的光學研究,如圖 1.2 所示[35]。 圖 1.2 達文西所繪雙眼視覺圖[35]。 隨後在西元 1600 年,義大利畫家恩波里(J. C. D. Empoli)將人類兩眼所見同 一物體的些微差別詳細畫出來,如下頁圖 1.3 所示[36]。當左右眼在同一位置分 別看到左右眼對應的圖畫時,此時大腦會自動把兩張圖合成有立體視覺的成像。圖 1.3 恩波里所繪之雙眼視差圖[36]。
到了西元 1839 年,英國科學家惠斯通(C. Wheatstone)利用了人類雙眼看同一 物體有不同成像的原理,發明可讓雙眼觀看帄面圖像產生不同成像的 3D 眼鏡, 稱為惠斯通立體鏡(Wheatstone mirror stereoscope),如圖 1.4 所示。圖 1.4 (b)為圖 1.4 (a)[37]裝置的示意圖。
(a)
(b)
西元 1952 年,同樣是英國科學家布魯斯特(D. Brewster)發表一篇革新的研究, 「如何由雙眼視覺推知距離」。他仔細的研磨兩個曲率、焦距、反射率完全一模 一樣的鏡頭,當成立體攝影機的兩個鏡頭,然後將兩個鏡頭的折射光投射到同一 張底片上,成功拍出了立體照片。不同顏色的光有不同的折射率,因此三度空間 的照片,與一般的照片不同,有不同顏色的光折射後的相位差。當人載上一種特 殊材質的眼鏡,這些相位差在人的視覺上就看出立體的影像,並且將裝置設計出 來,如圖 1.5 所示,圖 1.5 (b)為圖 1.5 (a)[38]裝置的示意圖。而他之後又在西元 1849 年製造出第一部簡單功能的立體攝影機。 (a) (b) 圖 1.5 布魯斯特立體鏡。 (a) 裝置實體圖[38];(b) 裝置示意圖。
西元 1853 年,羅爾曼(W. Rollmann)在德國發明了紅藍眼鏡式(red-blue 3D glasses)立體顯示技術,過了幾年後,西元 1860 年,出現了第一張模擬左右眼視 覺的立體照片,如圖 1.6 所示[39]。靜態的 3D 影像或照片經過需多科學家多年 研究,到此大致已經有初步的成果和技術了。 圖 1.6 第一張左右眼視覺照片圖[39]。 二十世紀開始,動態的 3D 影像陸續被科學家研究和發展。西元 1900 年間, 美國科學家 F. E. Ives 發明了模仿人類眼睛的高功能立體攝影機,西元 1922 年, 導演兼發明家 H. K. Fairall,運用一枚自製的雙鏡頭攝影機,拍攝出史上第一部 3D 電影愛的力量(the power of life),是一部黑白愛情默劇。當時的觀眾,只要戴 上以紅色及藍色鏡片組成的立體眼鏡,便能感受到電影的立體效果。西元 1927 年,德意志立體觀視協會(German society for stereoscopy,GSC)成立於德國柏林, 主要致力於研究 3D 影像技術。然後在西元 1932 年,對往後 3D 技術有重大影響 的發明問世,美國發明家 E. H. Land 發明了一種物質,可以從普通的光中產生 偏振光。這種濾光物質相對地比較便宜,且只讓某一振動方向的光波通過,即是 偏振濾光鏡(polaroid filter)。這種濾光物質現在以寶麗來(Polaroid)的商標為人所 知。
西元 1950~1980 年間,多部 3D 電影推出於市面上,算是 3D 技術的第一次 風潮,但是在 1980~1990 這十年之間,因為礙於 3D 技術始終無法更進一步突破, 於是 3D 熱潮開始減弱,直到了近十年間,以往視覺娛樂效果已經無法繼續滿足 人類的眼睛,於是在電影藝樂的流行和潮流帶動下,3D 話題又開始風行,更多 的人力物力投入下,3D 顯示技術有了更進一步的發展,西元 2009 年,強調以 3D 特效製作的電影阿凡達(Avatar)推出,更是將 3D 熱潮正式引爆,除了電影外, 電視、電腦、遊戲主機和智慧型手機等,無不與 3D 技術當作促銷話題,各大公 司推出了一系列 3D 的電子產品,趕搭上 3D 的潮流。
1.1.2 應用層面
3D 影像比以往的 2D 影像更能讓觀賞者知道畫面的空間感與距離感,符合 我們肉眼真實所見的感覺,一直以來被大量運用在影視產業上,從螢幕跑進跑出 的物體能讓觀眾有如身臨其境,娛樂效果十足。近年來,3D 顯示技術的快速發 展,3D 不再僅僅拿來取悅觀眾了,3D 技術開始結合教育、生命科學、地理資訊 重建、提升醫療手術品質與效率等各層面,應用面愈來愈廣也更多元,以 3D 創 新科技開始被業者、學術人員和科學家致力推崇。西元 2010 年 3 月,全球首次 3D Live 手術在比利時 Liège 執行,並和距轉播處 16 公里之外的醫院以現場轉播 方式同步撥出,轉播內容為一場腦神經外科手術,由比利時的神經外科權威 D. Martin 教授親自執刀。要完成這場即時轉播極為艱困,首先,所有的攝影器材都 必頇經過嚴格消毒,轉播工作人員也得像醫護人員般穿上無菌衣;另外,拍攝時 都必頇與醫療團隊保持至少十公尺的距離,以免因不必要的肢體碰撞造成干擾、 提高手術風險。除此之外,3D 即時影像的資料量非常龐大,拍攝團隊還請來比 利時知名電腦公司支援並架設網路,才得以順利進行。雖然手術過程中有打開頭 蓋骨等血肉模糊的畫面,非一般觀眾所能適應,然而對於醫療專業人員來說,3D影像如臨手術現場的視覺效果,卻對他們判斷病變位置、瞭解動刀程序,以及學 習手術時若遇到大出血或其他緊急情況的應變措施,帶來莫大助益。 3D 影像應用在醫療系統上著實有極大益處,在診療上,醫生透過 3D 影像 對病患和家屬做解釋和利弊說明,可讓對人體醫學不熟的病患和家屬對疾病的發 生位置和影響範圍更加清楚明瞭,不僅可讓病患有安心的作用,對於可能需開刀 的病患家屬,能在更短的時間內做出是否開刀的決定,縮短考慮時間在分秒必爭 的疾病上;而在手術中,醫生同步觀看 3D 影像能夠詳細且清楚的觀察病患體內 神經纖維束、腫瘤和組織分布的相對位置,不但讓手術前的流程規劃達到事半功 倍效果,更能提高手術成功率,也可有效對病患的病情做後續追蹤。3D 影像對 於醫學上不僅提升了效率,也能夠大大提升醫療品質。 除了醫療領域之外,3D 影像也廣泛應用在生物科學上的研究。例如台灣國 家實驗研究院高速網路與計算中心與清華大學生物科技研究所所長江安世教授 以及他的研究團隊合作,發展出突破性的超高解析度、3D 互動的單一神經元果 蠅全腦神經網路圖譜,並利用嶄新的 3D 生物影像科技,建構出果蠅腦內部分嗅 覺圖譜,發表了「果蠅腦內嗅覺神經網絡地圖」研究,立即得到國際學術界的重 視,並刊登於西元 2007 年 3 月頂級的細胞(CELL)科學期刊上[5],這是我國第一 篇獲登於該期刊的研究成果。
1.2 研究動機
由圖 1-1 我們可知,現今的 3D 顯示技術主要可分成戴眼鏡(glasses)3D 和裸 視(naked-eye)3D,戴眼鏡 3D 需要配戴對應畫面的 3D 眼鏡或是頭盔顯視器(head mounted display,HMD)[6]來輔助觀看。在戴眼鏡 3D 顯示技術高度發展的今日, 已經能滿足許多的需求,像是能夠讓多人共同觀看、3D 比以往更加逼真等,但 是當使用者戴上這些 3D 輔助器,使用一段時間後常常感受到各種生理上的不適, 例如近視者觀看 3D 電影,除了本身的近視眼鏡外,還需再戴上一副 3D 眼鏡,易造成鼻梁痠痛以及雙眼乾澀。另外,現今主要的戴眼鏡 3D 技術如偏振光 3D 眼鏡和快門 3D 眼鏡(此兩技術會在第二章裡作詳細介紹),使用時皆會使畫面亮 度降低,觀看者需更聚精會神的觀賞,長時間下來令很多人產生了大大的不適感。 除此之外,快門 3D 眼鏡技術搭配的畫面需要短時間內快速閃爍,雖然人體的視 覺暫留能克服極快速的閃爍畫面,不過看久了一樣會使人眼產生疲勞。文獻[7] 裡指出,市面上可買到或使用到的戴眼鏡 3D 產品,至少有超過百分之十,使用 時戴上 3D 輔助器觀賞時會明顯感受到不舒服。於是近年來各家廠商紛紛想改良 這個重大的缺點,投入了不需要配戴對應 3D 輔助器的裸視 3D 顯示技術研發。 主旨無不在於要創造出貼近人類世界更真實的立體影像,以及減低戴眼鏡 3D 技 術帶來的身心不適感影響。 此外,醫學上醫生對病患的診斷也常受醫生在診斷時無法清楚得知病患發病 部位詳細情形所困擾,例如醫生在頸部癌症上的診斷。頸部位於頭胸之間,在這 狹窄的有限部位通過了肌肉、神經、血管、淋巴管、氣管、食道,還有內分泌腺, 包括甲狀腺、副甲狀腺與部分的唾液腺等,有許多的器官與組織。在頸部腫塊中, 最常見的就是淋巴結的腫大。淋巴腺腫大又可分為發炎性與腫瘤性,造成良性淋 巴腺發炎的原因,大多是感染所造成;病毒性或是結核性頸部淋巴腺炎則大部分 檢查數據可能都正常,只能靠手術來證實。而頸部腫瘤可能會病變成癌症,例如 唾液腺癌、甲狀腺癌,或是從其他部位所轉移的淋巴腺腫大。時至今日,癌症一 直居於國人十大死因之首,不少人偶爾在頸部觸摸到了腫塊就驚慌失措趕緊就醫, 以為得到了癌症。在門診中醫生診斷時,常常需要以雙手去按壓病人頸部以及檢 視斷層掃描圖,就以推論病患可能的發病情形,但是醫生實際上並無法非常清楚 知道頸部內部的病變情形與發病後位置的空間結構,若是我們能提供一個裸視 3D 的顯像操控帄台,用來顯示病患頸部某部位的內部組織與器官的空間結構和 腫瘤的實際位置,並且可以將此部位由皮膚開始由外而內層層檢視,再配合醫生 本身對病患頸部的按壓與檢視斷層掃描圖,將有助於醫生對病情的掌控與了解, 實為對醫生的一大助益。
根據以上所述之相關問題,本論文先以 MATLAB 軟體寫出一個虛擬 3D 顯 像操控帄台,然後再將虛擬 3D 顯像與 MATLAB 的繪圖函式經過轉換再輸入至 C 語言軟體,最後再透過顯示卡內部的圖形驅動程式(graphics driver)將 Microsoft Direct3D API 的幾何向量圖形函式庫與影像資訊彩現(rendering)出具有深度資訊 的視差顯像,並以即時(real-time)的方式轉成多視角(multi-view)影像(用以產生裸 視 3D 顯像)。接著再合成柱狀透鏡 3D 顯示器的格式,輸出裸視 3D 顯像畫面。 此畫面能夠呈現虛擬物體三維空間中任意視角觀看、選擇物體單獨識別功能和橫 切面輪廓線功能。替未來生醫方面的影像處理研究者或是生醫研究者提供一個空 間感更加直觀的裸視 3D 模型顯像,做更進一步的研究。
1.3 論文貢獻
本論文基於裸視 3D,建構出一個顯像操作應用程式,並實現了一個即時裸 視立體顯像操控程式做為應用例,為往後的生醫研究者提供了一個應用例可供參 考或套用。此外,本論文將此操控程式的輸出畫面結合裸視 3D,提供使用者一 個嶄新的立體視覺效果,跳脫出傳統的 2D 畫面,且實現裸視 3D 的硬體只需一 塊可拆卸式柱狀透鏡螢幕套件和對應尺吋的液晶螢幕,裝卸方便又快速。接著, 本論文同時建構出帄面虛擬 3D 模型(MATLAB 介面中)與裸視 3D 模型的顯像, 讓使用者能夠根據此兩個畫面,在其之間做詳細的比對與檢視,增加了相關研究 人員對建立模型的三維空間結構和排列情形的了解。1.4 論文架構
本篇論文章節分為序論、相關理論與研究概況、系統架構流程和實驗模擬與 討論,安排如下。第一章簡述本論文的動機與目的,與發展歷史。第二章將介紹 此章節影像輸出方式來分類目前市面上常見的 3D 顯示的產品,並再介紹其工作 原理以及功能,接著詳細說明本論文所選用的裸視 3D 技術:柱狀透鏡式(lenticularlenses)的成像原理和主要理論,以便本論文後續討論及發展。然後第三章介紹本 論文設計的實驗,主要闡述本論文所設計應用程式,以 MATLAB 軟體為基礎測 詴帄台,並連結 C 程式語言與 Microsoft DirectX,以產生裸視 3D 顯像。第四章 本章節將依據第三章所述的連結方式,將 MATLAB 裡的虛擬物體連結至 C 程式 語言,再配合 Microsoft DirectX 的輸出,和可拆式 3D 柱狀透鏡螢幕,成功的將 虛擬物體以裸視 3D 的方式顯示在電腦螢幕上,最再將實驗結果做完整的討論。 最後第五章將針對前章節所述內容做一概括性總結,並說明本論文各項優缺點及 探討未來研究與改善方向。
第二章
相關知識及理論
與本篇論文相關的知識以及理論將會在此章節作說明。3D 顯示技術發展至 今日已經有諸多理論與技術,由於考慮到本論文第三章與第四章實驗的做法與理 論,在這裡不以第一章圖 1.1 的方式來分類,而是將目前主流的 3D 顯示技術以 影像輸出方式做一個概括性的分類以利後續的介紹,請見下頁圖 2.1,分別為左 右眼畫面差異輸出、多視角(視點)影像輸出和其它 3D 成像技術。 首先,2.1 節會先說明為何人的雙眼會有立體視覺;然後 2.2 節、2.3 節與 2.4 節將分別對左右眼畫面差異輸出、多視角(視點)影像輸出和其它獨有的 3D 成像 技術相關產品及其成像技術原理一一的做詳細介紹。 接著 2.5 節將會特別更加 一步詳盡說明與闡述的本篇論文使用的裸視 3D 顯示技術:柱狀透鏡式(lenticular lenses)的成像原理和主要理論。2.1 人類雙眼立體視覺
首先本章節先在 2.1.1 節說明立體視覺的成因;2.1.2 節說明深度感的三個形 式;然後再 2.1.3 節將會說明依據雙眼畫面如何得到深度資訊。2.1.1 立體視覺的成因
人類為什麼看東西會有立體感並且可以感覺到物體與我們距離的遠近?這是因為我們擁有立體視覺(stereoscopic vision)。我們之所以能感受到立體視覺,是 因為人類的雙眼是橫向並排的,之間大約相距 5 公分~7 公分,因此左眼所看到 的影像與右眼所看到的影像會有一個相對應的視角(viewing angle),如圖 2.2 所 示
圖 2.2 雙眼視覺與視角示意圖。 這個視角會造成我們兩眼看到的同一物體有些微的差異,左眼看到的物體 左側面多些,右眼看到的物體右側面多些,這個差異被稱為雙眼視差(binocular parallax)[8],如圖2.3視差示意圖所示。 圖 2.3 視差示意圖。
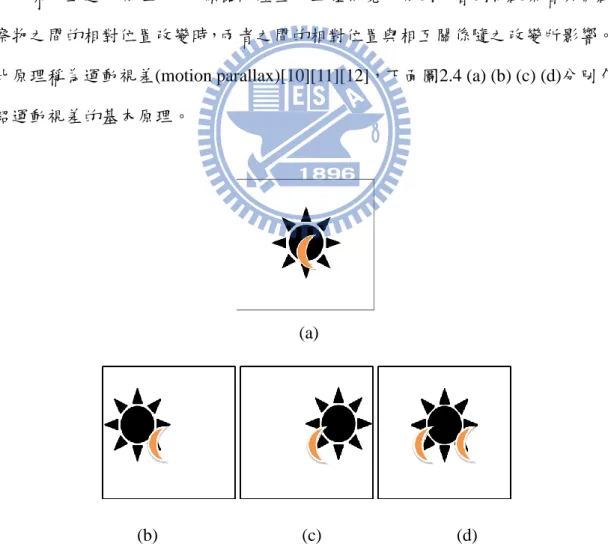
人類視網膜的基本機能和照相攝影的原理相類似[9],在我們的視網膜上面 密密麻麻地分布了上下左右二維的視神經細胞因此能夠感知左右兩眼所看同一 物體的這一點點些微差別。所以三維空間的物體,藉由其反射的光線進入到人類 眼睛的視網膜表面,在兩側視網膜上各形成一個彼此對稱,但同時完整的略有差 別的影像。此影像訊息經中樞整合後,再經過大腦的判斷與合成,便能夠知道物 體的存在與形狀,並產生了有厚度的一個物體的立體視覺。這就是人類擁有立體 視覺原理。雙眼視覺可擴大視野,增強判斷物體大小、距離的準確性;而單眼視 覺就缺少了距離感(深度資訊),雖然有時因物體陰影、光線反射等原因,也可產 生立體感,但是仍不夠確實,立體感沒有雙眼視覺來的好。 除了上述的原理外,人類雙眼產生的立體視覺的原因也會因為觀察者與被觀 察物之間的相對位置改變時,兩者之間的相對位置與相互關係隨之改變所影響。 此原理稱為運動視差(motion parallax)[10][11][12],下面圖2.4 (a) (b) (c) (d)分別介 紹運動視差的基本原理。
(a)
(b) (c) (d)
圖 2.4 運動視差的原理示意圖。 (a) 朝向人眼的月亮(前景)和太陽(後景);(b) 人 向右移動;(c) 人向左移動;(d) 遠景物定位。
首先圖2.4(a)表示人體靜止時觀看月亮(前景)和太陽(後景)的關係圖;當我們 身體稍微向右移動時,月亮和太陽的相對位置在此時發生了變化,如圖2.4(b)所 示;當我們身體稍微向左移動時,月亮和太陽的相對位置發生了與身體右移相反 的變化,如圖2.4(c)所示。如果現在我們身體往某方向快速移動,並將視點定位 在遠方景物太陽上面,會發現前方近物月亮會有晃動的並且模糊情形,此種視覺 上的效果就是運動視差,如圖2.4(d)所示之月亮晃動情形。例如當我們搭車時, 注視著遠方的某一座山,眼角餘光可以看到近方物體都變成一連串模糊的線條。 當然人類雙眼產生立體視覺的原因不僅僅只是上述兩個原因,以下各點皆是 讓人類感覺到視覺立體因素: 1. 所有被觀察物體之間三度空間中的排列配置及組合。 2. 觀看遠方物體之間的大小比例(contrast-ratio),也可以從比例的變化情形來判 斷物體的距離與深度。 3. 從被觀察物表面因光照產生的陰影變化和明暗情形等也可以感受到物體三度 空間的立體程度。 4. 每個人天生對立體圖形的感受度不同。 5. 長時間經驗的累積也會影響人類腦中判斷物體立體的程度。
2.1.2 深度感生成形式
基本上,我們人類的眼睛觀看景物可概分為遠、中、近三個層次,因此,我 們的眼球會隨著景物的遠近而自動調整到一個最舒服的視角來觀看,當兩個眼 睛各自有其不同的位置與角度時,自然就會產生視差了。而這個視差依眼睛觀看 遠、中、近程景物的不同也會影響人類觀看物體的立體感,其兩眼視線的變化又 可 以 分 為 : 交 錯 視 差 (crossed-parallax) 、 零 視 差 (zero-parallax) 與 非 交 錯 視 差 (uncrossed-parallax),以下介紹這三種形式的差別。1. 交錯視差:兩眼焦點視線在背景前有交叉的情況(亦即兩眼觀看近距離的物 體),其影像將會呈現在背景前的焦點上,如圖2.5所示。 圖 2.5 交錯視差示意圖。 以人體雙眼相距帄均6公分為例,若是觀看物體與雙眼中心距離10公分,視角為: 2 tan (1 3) 2 16.7 33.4 10 (2.1) 2. 零視差:兩眼焦點視線的交叉點落在背景上(亦即兩眼觀看中距離的物體),則 其影像將會呈現在背景上,如圖2.6所示。 圖 2.6 零視差示意圖。
若是觀看物體與雙眼中心距離 10 公尺,則視角為: 1 3 2 tan ( ) 2 0.17 0.34 1000 (2.2) 3. 非交錯視差:兩眼焦點視線在背景前沒有任何交叉情況(亦即兩眼觀看遠方的 物體),其影像將會呈現在背景後,如圖2.7所示。 圖 2.7 非交錯視差示意圖。 若是觀看物體與雙眼中心距離趨近於無限大,則視角為: 1 3 2 tan ( ) 0 (2.3) 上述的這三種產生視差的方式,將會使影像產生不同的立體效果,也會使我 們產生不同的遠近感。由公式 2.1~2.3 我們可知,觀看越近的物體,雙眼的視角 就越大,視差也越大,我們就越能分辨出物體的大小與距離,甚至是物體詳細的 形狀外觀;但是當觀看物體與雙眼中心距離趨近於無限大時,雙眼視角趨近於零, 就是非交錯視差,雙眼視差消失,人類大腦無法感知此資訊,我們人類就無法產 生立體感與遠近感,所以會判斷不出來物體離我們的遠近。例如當夜晚我們同時 觀賞月亮與台北 101 大樓時,會覺得月亮好像一個扁帄的圓面且就掛在台北 101 大樓的旁邊,這是因為月球距離地球的帄均距離為三十八萬公里,非常的遙遠, 我們雙眼的視角在觀看月球時趨近於零度,才會覺得離我們很遠的月球不是一個 球體只是一個帄面圓,且與離我們不遠的台北 101 大樓距離感覺相同。
2.1.3 雙眼畫面的深度資訊
圖 2.8 極線帄面示意圖。 根據文獻[13][14]所述,我們將雙眼注目在物體上的相交點與雙眼眼球的焦 點連線可以構成一個三角帄面,稱為極線帄面(epipolar),如圖 2.8 所表示。左右 眼畫面的帄面資訊以 x 軸和 y 軸表示;視覺深度資訊以 z 軸表示。座標系統的原 點設在B點,A點的座標為
x y z 。假設物體位於雙眼的右前方,點, ,
A為雙目 注視在物體上的交點;點B與點 C 為眼球內部的焦點;帄面 ABC 即為極線帄面。 現在我們從A點開始向左畫一條帄行於雙眼焦點連線的帄行線,當雙眼直視時會 與此條線交於點D及點E,所以DE帄行於 BC ,而點F和點H分別為左眼畫面 與BD的交點以及右眼畫面與 CE 的交點,於是由: BFG BDA (2.4) CHI CEA (2.5) 可以得到:x xl z f (2.6)
我們並且假設兩眼球焦點連線 BC 的距離為 b;還有BF f,同公式 2.6 可推出:
x b xr z f (2.7) 將公式 2.6 與 2.7 解連立方程式可得到視覺深度z為:
l r bf z x x (2.8) 當然,我們人體對z值只是一個距離的感覺,不可能清楚知道z值大小,但是在 設計 3D 顯視器使用規格上,畫面輸出後的最佳觀看距離是一個重要的參考值。
2.2 左右眼畫面差異輸出
從 3D 顯示技術開始發展自今,發明出了許多觀看 3D 的方式與產品,有許 多產品 3D 效果不甚理想,或是製作困難,只適合實驗中使用,很快的就不再被 世人所沿用,但是也有很多技術流傳下來了,不外乎是因為材料取得與製作方式 容易,3D 效果優良。本章節主要是介紹立體成像原理為左右眼畫面差異輸出的 各種產品。左右眼畫面差異輸出的意思就是讓兩眼在同一張影像上看到兩眼各自 的差異影像,也就是讓我們在一張影像上看到擁有視差的畫面,造成立體感。而 這方法又分成兩種,第一種方式是視差畫面同時顯現在一張影像上,並讓兩眼同 時看到,然後靠著 3D 輔助器(意即 3D 眼鏡)來過濾左右眼畫面,讓兩眼能看到 各自的影像;第二種方式是在極短的時間(小於人眼視覺暫留時間)內輪流輸出左 右眼畫面,也是配合 3D 眼鏡讓左右眼輪流看到各自對應的影像,靠左右眼畫面 差異達成 3D 立體成像。產品主要有下列這幾種,並且分別以各小節來介紹。依 據第一種方式成像的有:2.2.1 節:明暗眼鏡(pulfrich 3D glasses);2.2.2 節:紅藍(綠)眼鏡(red-blue/red-green 3D glasses);2.2.3 節:色碼眼鏡(color-code 3D glasses); 2.2.4 節:偏光眼鏡(polarized 3D glasses)。依據第二種方式成像的有:2.2.5 節:快門 式眼鏡(shutter 3D glasses)。
2.2.1 明暗眼鏡
眼鏡實物如下圖2.9所示,其原理在西元1922年德國天文學家C. Pulfrich觀察 直線來回運動與雙眼聚焦的關係時發現。明暗眼鏡是由一片深色鏡片及一片透明 鏡片組成的,是因為人眼在亮度不同(明亮與黑暗)的情況下,對於動態的判斷時 間會有差異。經由透過明暗眼鏡讓左右眼接收的亮度不同,就能產生視差,進一 步產生3D的效果。此種方式最大的好處當然就是不需要眼鏡之外任何特別的器 材跟影片,不過明暗眼鏡效果要在動態的東西上才能完全顯現出來,例如電影或 是遊戲之類據有動態的畫面。當觀賞動態影像時,能讓任何2D畫面變成3D影片。 但對停止不動的圖片是沒有任何效用的,且3D效果還是沒有真正的3D影片來的 好。 圖 2.9 明暗眼鏡。2.2.2 紅藍(綠)眼鏡
眼鏡實物分別如下圖2.10和圖2.11所示。最早問世的紅藍(綠)眼鏡是採用紅 色與藍色(或紅色與綠色)濾色片構成的3D眼鏡,眼鏡本身的成本很低,其觀賞影 像製作的方式可利用兩台攝相機,在帄面上拍攝影像,拍出一模一樣,但位置略 有差異的紅色以及藍(綠)色物體。利用一眼為紅,另一眼為藍(綠)的眼鏡觀看。 紅色瀘片會濾掉紅色,因此會看到藍(綠)色物體的影像;而藍(綠)色濾片會濾掉 藍(綠)色的影像,因而看到紅色物體的影像。模擬出左眼的視線以及右眼的視線, 創造出雙眼視差,因此產生立體影像。最早期的3D電影多採用此方式[16],然後 再讓觀看者配戴紅藍3D眼鏡來觀看。畫面影像如圖2.12所示[40]。 圖 2.10 紅藍眼鏡。 圖 2.11 紅綠眼鏡。 圖 2.12 紅藍眼鏡影像畫面[40]。2.2.3 色碼眼鏡
眼鏡實物如圖 2.13 所示,眼鏡畫面如圖 2.14 所示。色碼眼鏡是由紅藍眼鏡 改良而來的[15],由於紅藍濾色片式 3D 眼鏡有著無法正確重現原本畫面色彩的 缺點,因此後續有廠商推出了改良式紅藍眼鏡,就叫做色碼眼鏡(color-code 3D glasses)。這種 3D 眼鏡是以琥珀色和藍色做為濾色片,琥珀色用於觀看彩色訊息; 藍色用於觀看深度資訊,經由人類大腦自動的合成與分析後,我們就可以立體畫 面。使用色碼眼鏡觀看影片時的優點為畫面色彩繪失真較小,視覺上面比較自然 舒適,但是也帶來了立體效果不明顯的缺點。不過即使觀賞者不戴上眼鏡直接觀 看,也可以看到清晰悅目的 2D 影像,失真非常小,這也是此系統在技術上可與 其它 3D 系統競爭的優勢之一。 圖 2.13 色碼眼鏡。 圖 2.14 色碼眼鏡影像畫面。2.2.4 偏光眼鏡
偏光眼鏡[1][3]又可以分成雙投影法(double projection)[17]、線型偏光法 (linearly polarized)與環型偏光法(circularly polarized glasses)。近年的3D電影多半 採用此種偏光方式來呈現。不過此種方式必頇使用特殊的投影機或是螢幕等顯示 設備才能呈現,無法適用於帄面印刷媒體或是一般顯示設備。 1. 雙投影法: 雙投影法是偏光眼鏡早期的技術,原理為使用兩台投影機,一台放映左眼的 影像,一台放映右眼的影像,投射在同一片螢幕上,投影時,兩台投影機的鏡頭 上都加上不同極性的偏光鏡片(垂直、水帄),觀賞者也必需戴上對應的偏光眼鏡, 此種方法需要兩套投影設備,成本實在過於高昂,因此一直無法普及。 2. 線型偏光法: 線型偏光法是從雙投影法延伸而來,經過改良後給液晶顯示器用的。因為液 晶顯示器無法像雙投影的螢幕般,同時在同一位置上發出不同偏振方向的光,但 是科技始終來至人性,因此的聰明的工程師就將腦筋動到了液晶顯視器的偏光膜 上。光波通過垂直偏光膜如圖2.15所示。 圖 2.15 光波通過垂直偏光膜示意圖。
工程師將液晶顯示器的奇數行掃描線和偶數行掃描線設計成擁有不同的偏 光方向,並且巧妙地設計液晶顯示器上偏光膜前後兩片偏光片的極性,來改變顯 示器發光的偏極性,再搭配上偏光眼鏡,使偏光眼鏡上的偏光片極性正確的配合 顯視器,就可以讓左右眼各自只看得到一半的掃描線,而另一半的掃描線看貣來 則是黑的。在這樣的設計下,把左眼的影像放在奇數的掃描線上顯示;而把右眼 的影像放在偶數的掃描線上顯示,就可以觀賞到立體影像了。而這種偏光眼鏡我 們稱它為被動式眼鏡(passive 3D glasses)。圖2.16為線型偏光原理示意圖;圖2.17 為線型偏光眼鏡實物。 圖 2.16 光波通過線型偏光眼鏡示意圖。 圖 2.17 線型偏光眼鏡。
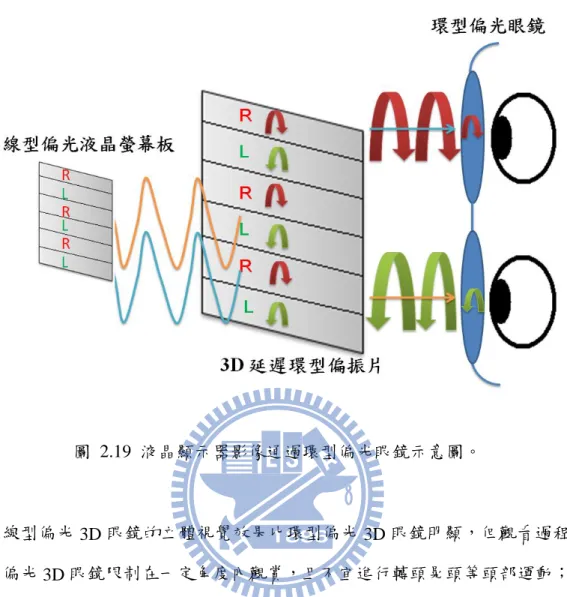
如圖2.18所示,在液晶顯示器上,可使用兩片重疊的液晶面板各自顯示垂直 與水帄偏光畫面,此方式的成本較高;或者是在顯視器螢幕表面配置奇偶交錯排 列的垂直與水帄偏光片,各利用一半像素顯示垂直與水帄偏光畫面,此方式的成 本較低,不過垂直或水帄解析度會減半。此外線型偏光片只會過濾光線的方向, 而不會像濾色片那樣過濾光線的顏色,因此我們可以完整保留畫面的色彩。 圖 2.18 液晶顯示器影像通過線型偏光眼鏡示意圖。 3. 環型偏光法: 環型偏光法也稱圓型偏光法,原理與線型偏光法一樣,差別在於影像畫面投 射出來的線型偏光經環型偏光濾鏡板改變了偏振方向而已。如圖 2.19 所示,一 開始液晶顯視器底層的 LCD panel 分別投射出左右眼畫面的線型偏振光,然後經 過一層延遲偏振片(3D retardation filter)過濾後將線型偏振光分別濾成左圓偏光 (逆時針)與右圓偏光(順時針),再透過配合的環型偏光 3D 眼鏡接收左右眼不同旋 轉方向的偏光後就可以看到 3D 影像了。
圖 2.19 液晶顯示器影像通過環型偏光眼鏡示意圖。 線型偏光 3D 眼鏡的立體視覺效果比環型偏光 3D 眼鏡明顯,但觀看過程中 線型偏光 3D 眼鏡限制在一定角度內觀賞,且不宜進行轉頭晃頭等頭部運動;環 型偏光 3D 眼鏡對頭部晃動限制就比較小,觀看角度比線型偏光法還要廣,此外 環形偏光片跟線型偏光片一樣也只會過濾光線的方向,而不會像濾色片那樣過濾 光線的顏色,我們也能夠完整保留畫面的彩度與明亮度。環型偏光眼鏡實物如圖 2.20 所示。 圖 2.20 環型偏光眼鏡。
2.2.5 快門眼鏡
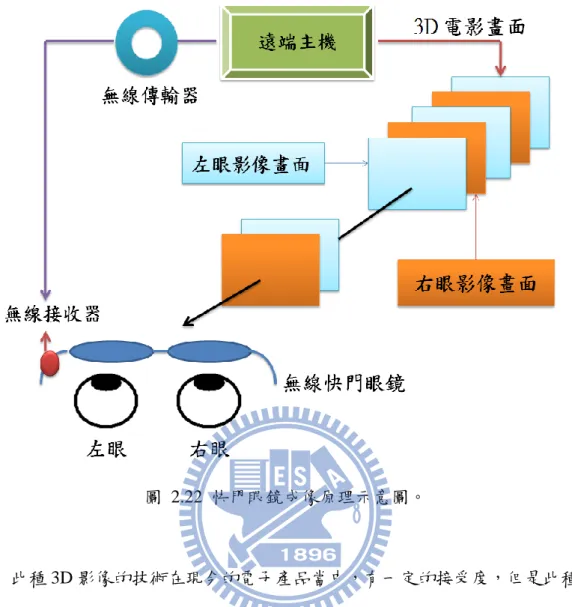
快門眼鏡實物如圖 2.21 所示。快門式眼鏡的立體成效需要搭配畫面切換 法才能顯現出效果,原理是將影像畫面分割成奇數畫面和偶數畫面配合左眼和 右眼,交替顯示左右眼所需要的影像,並透過遠方主機端的無線發射器來控制 眼鏡本身的液晶開關,同時讓觀賞者所佩戴的眼鏡配合所顯示的影像做開關的 動作,來達到和畫面同步的目的,如圖 2.22 所示。當顯示左眼的影像時,眼 鏡左開右關;當顯示右眼的影像時,眼鏡右開左關,只要切換的速度夠快,因 為視覺暫留的關係,左右眼都可以看到各自的影像而不會有閃爍的感覺產生。 而要達到讓人感覺不到閃爍,3D 眼鏡刷新的頻率必頇保證在 60Hz 以上,同 時顯示器畫面的切換速度也必頇和 3D 眼鏡的切換速度相同,對於顯示器來說, 刷新率最少則要達到 120Hz。當影像分別傳遞到大腦後,經過大腦的判別,就 會形成具有深度感的立體影像。畫面切換法所使用的眼鏡必需要能接受遠方主 機 端 的 即 時 控 制 , 因 此 所 用 的 快 門 式 眼 鏡 又 稱 為 主 動 式 眼 鏡 (active 3D glasses)。 圖 2.21 快門眼鏡。圖 2.22 快門眼鏡成像原理示意圖。 此種 3D 影像的技術在現今的電子產品當中,有一定的接受度,但是此種系 統也有許多缺點,例如觀賞畫面觀看時亮度損失太多,因為主動式眼鏡本身的透 光率就不夠好,再加上左右眼切換時各自只有全部顯示時間的一半能看到有效的 畫面,所以畫面看貣來會遠比不戴眼鏡時要暗上許多,長時間容易造成眼睛疲勞 或頭暈現象。還有主動式眼鏡造價昂貴且需要提供而外電源也都是使用業者需考 量的地方。
2.3 多視角(視點)影像輸出
所謂的裸視 3D 顯示技術,是指在不配戴任何輔助器過濾畫面的狀態下以裸 眼視覺就能直接觀看到 3D 顯示的效果。基本原理仍舊是讓左右眼觀看不同畫面 產生視差來營造立體感,因此必頇透過特殊設計的螢幕來達成目標。達成方法需透過精密的光學計算,並同時控制左右兩眼影像的每個畫素所發出的光線,讓光 線只射向空間中計算好的特定位置,進而讓觀賞者在特定的區域範圍時,左眼看 到的都是左眼影像、右眼看到的都是右眼的影像。雖然今日發展出來的技術其光 學原理或操控方法稍有不同,但是它們都是使用多視角(或多視點)影像來呈現 3D 效果,也就是上面所解釋的。 多視角(或多視點)影像根據光線控制的運作模式,又有許多種不同的方法, 目前主要的方法有空間多功式(spatial multiplexed)與分時多功式(time multiplexed) 兩大類。空間多功式立體顯示技術是指在同一個螢幕上,以分割顯示區域(空間) 同時顯示左右兩眼畫面(多功)來達成3D顯示效果的方式,其主要有兩種主流的技 術分別在2.3.1節:視差屏障式(parallax barriers)與2.3.2節:柱狀透鏡式(lenticular lenses)裡探討;而分時多功式立體顯示技術是指在同一個螢幕上,各切割一半時 間來交替顯示(分時)左右兩眼畫面(多功)以達成3D顯示效果的方式,因此被稱為 分時多功,主要的技術會在2.3.3節:指向光源式(directional backlight)裡做說明。 由於裸視3D顯示在技術上仍有許多限制,因此主要用於個人化小型化的顯示用 途,如行動電話、數位相機等。
2.3.1 視差屏障式
視差屏障式的原理為運用光的繞射(diffraction)。方式為在原本顯示器螢幕前 一小段距離上設置許多細微的縱向直條光柵,亦稱為光柵屏障,阻擋螢幕多視角 畫面的光線通過,並控制光線進行的方向,並遮蔽了部分的畫面,且將左眼看到 的畫素為設計成只給左眼看的畫面;右眼則只能設計成只讓右眼接收的畫面,由 於光柵的存在,左右眼各自被遮蔽到不同的部分,經過光線的繞射後看到不同的 畫面,因此讓左右眼有視差產生,造成立體感。原理示意如下頁圖2.23所示。 但是此種技術的缺點是頇將畫面分成左眼的畫面與右眼的畫面,因此解析度 與畫面亮度都會降低成為原本的一半。此外,能夠觀看的範圍較小,有著觀看距離、角度與方向的限制,必頇在規劃的距離與角度內觀看才能看到完整畫面,而 且畫面轉九十度時就會無法呈現立體感。為了改善上述的情形,有廠商研發另外 的技術來改善視差屏障式3D顯示螢幕的先天限制,像是採用可開關的液晶薄膜 來充當視差屏障,如圖2.24所示,就能透過視差屏障的光柵開關來切換2D與3D 顯示模式,視差屏障排列方式也可以製作成水帄與垂直兩種方向,配合橫拿與直 拿的需求切換[18][19]。 圖 2.23 視差屏障式成像原理示意圖。 圖 2.24 視差屏障式2D和3D互相轉換示意圖。
2.3.2 柱狀透鏡式
柱狀透鏡式的原理為在螢幕上設置半圓柱狀的凸透鏡薄膜,將它旋轉一個角 度後,再緊密貼合在液晶面板上,如圖2.25所示。旋轉一個角度的目的是在消除 RGB sub-pixel之間的黑色間隙(black matrix)所產生之干擾紋,再透過透鏡折射角 度不同分別讓左眼和右眼看到不同的影像。因光線折射的關係,使得左眼只能夠 看到折射至左眼的畫面;右眼只能夠看到折射至右眼的畫面,雙眼看到不同的畫 面,造成立體感[20]。此種作法視和視差屏障式最大的差異就在於,柱狀透鏡式 的做法因為沒有光柵的阻檔,光穿過透鏡的效率相對高,這也讓此種系統的熱耗 能與電耗能可以有效的控制,不至於過高。 圖 2.25 柱狀透鏡式成像原理示意圖。 此種方式和視差屏障式同樣也會導致畫質的降低。由於透鏡折射角度的關係, 從多個角度觀看都能夠產生立體的效果,可視範圍較視差屏障式螢幕大,但若觀 看角度太偏則會造成影像重疊的狀況,所以與視差屏障式一樣,觀賞者的方向與 距離必頇在一定範圍內才能有較好的3D成像。2.3.3 指向光源式
指向光源式3D顯示[21][22],是藉由指向性背光膜搭配左右配置的兩組LED 背光光源,以高速交替方式分別朝左右眼顯示不同畫面,當螢幕右側的背光光源 亮貣時,就會透過指向性背光膜發射出朝左眼方向的光線,用來顯示左眼畫面; 當左側的背光光源亮貣時,就會透過指向性背光膜射出朝右眼方向的光線,用來 顯示右眼畫面,經過兩測的光源快速交替投射,就能夠讓雙眼分別接收到動態的 畫面,藉此產生雙眼視差並產生立體感,如圖2.26所示。 圖 2.26 指向光源式成像原理示意圖。 由於指向光源式 3D 採用分時多功系統,因此每次都能以顯示器面板的完整 解析度來顯示畫面,而且只要左右兩側的背光光源同時亮貣,就能切換為 2D 顯 示模式。不過由於左右眼畫面是以指向性的方式顯示,因此只有從螢幕正面觀看 時才能看到立體影像,當螢幕旋轉九十度時和視差屏障式一樣亦無法顯示立體影 像。2.4 其它 3D 成像技術
在本章節會介紹其它各門各類的 3D 顯示技術,而它們都有各自的成像原理 和特別的技術,其中需靠 3D 輔助器成像的為頭盔顯示器(head mounted display, HMD)會在 2.4.1 節中介紹;裸視 3D 的分別在 2.4.2 節:全息攝影(holographic projection);2.4.3 節:體積式(volumetric type);2.4.4 節:多帄面式(multi-plane type) 中做說明與介紹。
2.4.1 頭盔 3D 顯示器
頭盔顯示器如圖2.27所示[41],是一種相當精巧的視覺感知器,它利用頭盔 將人的對外界的視覺、聽覺封閉貣來,讓使用者產生一種身在虛擬環境中的感覺。 其原理是將小型的傳統二維顯示器所產生的影像藉用光學系統放大,其所發射的 光線在經過凸狀透鏡使影像因折射產生類似遠方效果,利用此效果將近處物體放 大至遠處觀賞而使人體產生全像視覺(hologram)的感知[23]。早期的頭配顯示器 體積較為龐大且笨重,主要做為飛行員模擬空中軍事作戰或是駕駛飛行器的用途, 後來發展至娛樂與商業領域,近十年來,頭配顯示器發展與改良得更為輕巧,漸 漸被應用在醫學手術、專業修護所需的輔助影像接收工具方面。 圖 2.27 頭盔顯示器[41]。2.4.2 全息攝影
全息攝影又稱為3D浮空技術,這項技術是源自於一種魔術:Pepper's ghost光 學技術,Pepper's ghost光學技術貣源於西元 1836年,倫敦Royal Polytechnic Institution的教授J. H. Pepper教授應用了當時一位英國工程師H. Dircks先生對於 一種光學鏡面的特性所提出的概念與想法,結合了類似魔術的劇場效果與當時的 投影技術,並在表演舞台上展示了一場驚奇的魔術,內容為一個虛幻像幽靈的鬼 影出現在實體的空間中,如圖2.28 (a) (b) (c)所示[42]。
(a) (b) (c)
圖 2.28 魔術Pepper's ghost效果示意圖[42]。 (a) 左方房間開燈;(b) 左方房間關 燈;(c) 左方房間燈由亮變暗。
達到此效果的原理是藉由一種反射率與穿透率各百分之五十的半銀面鏡 (half-silvered mirror)或是單面鏡(one-way mirror),意即正反兩面都是類似鏡面效 果的玻璃,並且再加上燈光的控制,能夠在空間中投影出立體的、可穿透式的虛 擬影像。如圖2.28(a)所示,右下方帄行的框線可讓觀賞者看到右方房間裡面的情 形,中間斜向框線放置了半銀面鏡,而左方的房間裡放置真實的人像物體與桌子。 當左方房間開啟燈光時,左方房間裡的人像物體與桌子經由半銀面鏡的光學物理 效果做用後在右方房間產生了虛擬的人像物體與桌子,而觀賞者就可以在右方房 間看到此虛幻的影像。如圖2.28(b)所示,當左方房間關閉燈光時,左方房間裡的 人像物體與桌子也就隨之消失不見,因此觀賞者在右方房間裡就看不到任何虛幻
的影像。如圖2.28(c)所示,當左方房間的燈光由亮變暗漸漸調整時,觀賞者可以 在右方房間裡看見人像物體與桌子從明顯變成模糊漸漸的消失不見。 而全息攝影經由上述的Pepper's ghost光學原理並經過需多的改良與改進發 展而來。發明者為1947年,英國匈牙利裔物理學家G. Dennis[24],他提出了全息 攝影的兩個初步想法,第一是如何得到包含了物體波的振幅和相位的干涉圖,也 就是全息圖;第二是如何用參考光源照射全息圖,使物體虛擬成像。由於兩個波 是沿同軸傳播的,也稱為同軸全息攝影。但因為此技術需要高干涉性和高強度的 參考光源,所以發展程度有限。到了西元1960年,第一台激光器發明,替全息攝 影領域解決了長久以來干涉光源太弱的問題,西元1962年美國密西根大學的利 E. Leith和J. Upatnieks發明了離軸全息攝影,其中提出的激光全息攝影和光學訊 息處理方法,使得全息攝影領域快速進入到實用的階段,並且成為了近年來全息 攝影的基礎。全息攝影的本質是一種利用干涉原理的照相技術,當把被攝物體的 振幅和相位保留下來做成紀錄膠片,再經過和紀錄膠片擁有相同振幅和相位得雷 射激光照射,就可以將記錄膠片的內容虛擬重建,彷彿物體就在那裡一樣。由於 記錄膠片上任何一部分均紀錄了物體的全部訊息,所已通過不同的方位和角度觀 察照片,均可以看到被拍攝的物體的不同的角度影像,因此記錄得到的影像可以 使人產生3D視覺。 全息攝影替紀錄影像或訊息帶來了革命性的發展,自西元 1962 年開始,經 過近半世紀的迅速發展,在干涉測量、照相技術、大容量訊息儲存和顯式處理等 許多方面得到了廣泛的應用。西元 1990 年,美國麻省理工學院多媒體實驗室的 空間成像小組以全息攝影的視頻技術,並在許多世界知名企業和公司的資助下, 有巨大的突破[25],研發出 30mm30mm30mm 的即時和具有水帄視差的 3D 全息攝影圖,西元 1992 年又研發出 150mm75mm160mm 且擁有真實色彩的 3D 全息攝影圖[26],之後在西元 1999 年美國底特律的汽車展覽會上,Zebra 公 司替 Ford 汽車公司製做了一個體積 4.9m1.2m 的真實色彩、大視角(可以任意 角度觀賞)和全視差(彎腰看可到圖像的底部,高處可看到頂部)的世界最大全息攝
影圖。全息攝影影像的影視及資訊效果遠超過了傳統的照片和影片,近十年來在 電影藝樂、藝術表演、廣告宣傳和國防科技上都有大量的運用與發展,有著無窮 盡的發展前景,成為當今了一項熱門的技術。
2.4.3 體積式 3D 技術
此技術最先由美國德州儀器公司於西元 2000 左右提出了一種利用鐳射掃描 立體影像的顯示技術[27]。主要是利用一個快速旋轉的圓盤,配合由底下投影的 鐳射光源,通過鐳射光源投射到快速旋轉的旋轉面時,會產生散射效應,以掃描 空間中的每一點。其缺點是影像中央必頇有一個旋轉軸,靠近軸心的影像旋轉速 度較慢,立體影像較不清晰。構造如圖 2.29 所示[43]。 圖 2.29 體積式3D顯示技術構造圖[43]。2.4.4 多帄面式 3D 技術
多帄面式 3D 顯示技術[28]主要原理為利用一種兩面重疊的液晶面板,在兩 個面板顯示大小相同的影響,利用物體和觀賞者之間遠近不同的距離,會有明度 及顏色上的差別,進而重疊前後物體影像,使觀賞者在視覺上產生立體感。但是 其缺點是前後面板的對位困難,且因為此形態的立體 3D 顯示是將兩個 2D 影像 重疊,因此只有在特定範圍及方向內觀賞,才會有較佳的立體 3D 效果,其餘的 觀賞角度效果均不好。2.5 柱狀透鏡式裸視 3D 技術與原理
根據 2.3 節的內容,以多視角(或多視點)影像來呈現 3D 效果,根據光線控 制的運作模式,有許多種不同的方法,目前主要的方法有空間多功式(spatial multiplexed)與分時多功式(time multiplexed)兩大類。其中空間多功式中包含視差 屏障式(2.3.1 節)與柱狀透鏡式(2.3.2)兩種成像類型。本論文主要用到的就是柱狀 透鏡式 3D 顯示技術,因此接下來在本章節中,會詳細講解此技術的技術與原理。 柱狀透鏡式 3D 顯像的方法,主要是靠產生出多視角影像畫面再加上柱狀透 鏡螢幕的搭配來達成。首先,多視角(multi-view)畫面是從兩個視角(two-view)畫 面發展而來,人類利用兩個視角畫面來做出立體效果已經有超過一百年左右的歷 史了[29][30],其中也有視差屏障式和柱狀透鏡式這兩種,這邊我們就只說明柱 狀透鏡式,而柱狀透鏡式的兩個視角視覺區域如下圖 2.30 表示。 圖 2.30 兩個視角(two-view)視覺區域圖。圖 2.30 下方的長條代表螢幕,上方則是代表螢幕的正前方,螢幕上其中一 個像素發出來的光線,會發射往空間不同的位置,圖 2.30 中 R 和 L 是表示觀察 者在此區域看到的分別是右眼(R)和左眼(L)畫面,而的發射狀箭頭,代表 R 和 L 區域中間的間隔。在這樣的情況中如果人眼的右眼位置在 R 區域裡頭;左眼位 置在 L 區域裡頭,這樣雙眼剛好各自接收到不同的畫面(如括弧所示),這樣就可 以正常的產生了 3D 視覺效果[31],而要能達到這樣的狀況,除了和螢幕的距離 要在設計的觀賞距離的範圍內以外,和螢幕的相對位置,也是需要調整的。但是 如果此時人眼的右眼位置在 L 區域裡頭;左眼位置在 R 區域裡頭,這樣一來右 眼看到了左眼畫面;左眼看到了右眼畫面(如打叉的括弧所示),雙眼接收到相反 的畫面,就無法正確的產生立體效果了,並且稱為反立體視點區域(pseudoscopic image viewing position)[2]。此外,我們從圖中也可清楚的知道,在兩個視角系統 中,我們只有二分之一的機會看到正確的立體效果,另有二分之一的機會看到不 正確的立體效果(反立體視點區域)。 由此可知,我們若要製造出同時具有左右兩眼的畫面,勢必要將螢幕解析度 調降成二分之一,間格穿插左右眼的影像,才能製成如此視覺區域的畫面。這也 就是為何多視角畫面輸出的方式,畫面解析度都會降低的原因。不過實際上由於 螢幕的光源不只一個點,所以左右眼各自的視區實際上不會是像圖 2.30 一樣的 扇形,而是根據視角、位置的不同,有更複雜的形狀;同時,在實際狀況中,這 些視區也會更小。 如果要解決這種可視範圍區域過少的情形,目前市場上比較普遍的方法,就 是在原來只有左右眼的兩個視角,加入更多不同角度的視角,這樣的話,可以正 確看到立體效果的區域就會增加。下頁圖 2.31 即表示一個多視角畫面的系統(五 個視角系統),圖中的數字 1 到 5 就是代表由右到左的五個不同視角的影像、數 字不同就是代表不同的視角,其攝影機拍攝示意如圖 2.32 所示,若是上面所述 之兩個視角(two-view)系統,其攝影機拍攝位置可能只有數字 2 和 4。
(a) (b) 圖 2.31 五個視角(five-view)。 (a) 視覺區域圖;(b) 拍攝示意圖。 由於變成了五個視角,所以只要是順序正確的,例如右眼看到 1 區域左眼看 到 2 區域、右眼看到 2 區域左眼看到 3 區域或是右眼看到 3 區域左眼看到 4 區域 等,都可以得到正確的立體視覺效果;但是如果右眼看到 5 區域左眼看到 1 區域 的話,這樣左右眼看到的視覺區域正好相反,因此無法得到立體視覺效果,是為 反立體視點區域。由此可知,我們增加了拍攝時的時的視角,立體視覺的可視區
域就變大了,但是還是會有幾個少數的角度無法得到正確的立體影像(如圖 2.31 中三個打叉的區域)。同樣的,如同兩個視角系統,當我們將螢幕上其中一個發 光源區塊做成五個視角的畫面時,為了在此區塊中放入五個視角的影像,畫面的 解析度就會下降成五分之一了,這樣的問題雖然我們可以透過增加面板製造時的 解析度來改善,但是效果仍然有限,這也就是多視角畫面輸出技術未來需要改良 的地方。 至於多少視角數目(view count)才能滿足需要,兩個、四個、九個或是十六個 視角數目?這是要根據所使用 3D 帄台(如裸眼 3D 顯示器、光柵影像列印、全像 顯示器等) 的硬體書出規格要求而定。基本上,視角數目愈多,則在該 3D 帄台 的有效 3D 觀賞視角(viewing angle)內,我們可以觀賞到愈帄順的 3D 立體影像視 角變化(頭擺動的時候),而不會有跳動(jerky motion)、不連續的不舒服感。而視 角數目愈多,並不代表立體效果就會愈佳,這兩者之間沒有一定的關連。 另外,多視角畫面與觀賞者雙眼的距離和位置,也會影響到 3D 顯像的效果, 下圖 2.32 是一個六個視角的柱狀透鏡光柵片用來呈現 3D 顯像的例子。 圖 2.32 觀賞者距離位置與 3D 顯像效果關係示意圖。
首先,我們知道柱狀透鏡螢幕實際上發光源不會只有一點,圖 2.32 只是一 個示意情形,旨為用來說明。此螢幕在有效 3D 觀賞視角內它可以呈現六個視角 的 3D 影像。當觀賞者處於觀賞位置一時,可以觀賞到第 1(最右)與第 6(最左)的 影像,此時所觀賞到的是最大視差的 3D 效果;當觀賞者往後移動至觀賞位置二 時,則觀賞到的是間隔兩個的視角(如第 2 與第 4)的影像;如果觀賞者在觀賞位 置三時,則僅能觀賞到相鄰兩個視角(如第 3 與第 4)的影像。以上各位置點,若 觀賞者往左右移動,仍會看到 3D 效果,因為不管如何左右移動,觀察者的雙眼 都不可能落在同一個視區內(此時要想像圖 2.32 發光源旁邊仍有許許多多發光 源)。但如果觀賞者在觀賞位置四時,則僅能觀賞到相同視角(如第 4 與第 4)的影 像,所觀賞到的畫面並無 3D 效果;而此時觀賞者往左右移動,也有一定的機會 雙眼會分別落在不同的相鄰兩視角內,感覺到 3D 效果。然而,從觀賞位置三到 觀賞位置四我們可以發現,看到正確 3D 效果的機率降低了,這也造成我們若在 有效的 3D 觀賞距離之外觀看螢幕,常常會感覺畫面晃動和無立體感。如果再更 進一步往後退並且左右移動,我們可以明確發現,看到正確 3D 效果的機率更低 了,雙眼會有很大的機率落在同一視區內,即使找到正確位置看到 3D 效果也可 能一晃即過。從這個例子可以解釋為何多視角 3D 立體影像可以提供多人在不同 位置同時觀賞到 3D 立體影像;也可以知道如何觀賞多視角 3D 立體影像。當我 們觀賞 3D 效果不舒服(或視差太大)時,只要在有效 3D 觀賞距離內,則我們可 以往後退或左右移動到感覺舒服的觀賞位置,但是觀賞距離也不能夠太遠。
![圖 1.4 惠斯通立體鏡。 (a) 裝置實體圖[37];(b) 裝置示意圖。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8531812.187261/16.892.304.627.109.347/圖14惠斯通立體鏡a裝置實體圖37b裝置示意圖.webp)
![圖 2.2 雙眼視覺與視角示意圖。 這個視角 會造成我們兩眼看到的同一物體有些微的差異,左眼看到的物體 左側面多些,右眼看到的物體右側面多些,這個差異被稱為雙眼視差(binocular parallax)[8],如圖2.3視差示意圖所示。 圖 2.3 視差示意圖。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8531812.187261/26.892.135.756.124.1085/物體左側面多些右眼看到的物體側面多些這個差異如圖所示圖.webp)
![圖 2.28 魔術Pepper's ghost效果示意圖[42]。 (a) 左方房間開燈;(b) 左方房間關 燈;(c) 左方房間燈由亮變暗。](https://thumb-ap.123doks.com/thumbv2/9libinfo/8531812.187261/47.892.153.752.450.742/圖2魔術Peppers效果示意a左方房間開燈b左方房間關燈c左方房間燈由亮變.webp)