光學防手震鏡頭設計
24
0
0
全文
(2) 光學防手震鏡頭設計. 摘要. 本研究運用光學設計軟體 ZEMAX 的模擬和優化功能來設計變焦光 學系統,並在變焦光學系統上加入光學式補正的防手震設計。此系統為 一正正負的三群變焦鏡頭,第二群之中包含了前群和後群的透鏡,這兩 個鏡組構成了一個可在垂直光軸上移動的防震鏡組。 我們藉由光線追跡的方程式再搭配 MATLAB,成功找出相機震動後 防震鏡組所需補償的偏移量,即可使鏡頭在容易產生晃動的長焦距拍攝 時,減少手震的影響,提高影像品質,進而達到防手震的效果。. 關鍵字:防震鏡組、光線追跡. i. 逢甲大學學生報告 ePaper(2005 年).
(3) 光學防手震鏡頭設計. Abstract. We designed the zoom system with the optical software ZEMAX, and the zoom lens system have a vibration correcting lens group。The system comprising,from front to rear,first and second lens groups of positive power and a third lens group of negative power,the second lens group includes a front lens group and a rear lens group,and constitutes a vibration correcting lens group moveable perpendicularly to the optical axis。 Through the ray tracing program and MATLAB,we can obtain the displacement of the correcting lens group to decrease the effect of vibration,to improvement the quality of image,and complete vibration correcting system。. Keyword: vibration correcting lens group、ray tracing. ii. 逢甲大學學生報告 ePaper(2005 年).
(4) 光學防手震鏡頭設計. 目錄 中文摘要 ……………………………………………………………………i Abstract …………………………………………………………………….ii 目錄 ………………………………………………………………………..iii 第一章. 緒論. 1.1. 研究動機與方向 …………………………………………….…1. 1.2. 章節概述 ……………………………………………………….3. 第二章. 防手震簡介. 2.1. 手震三大原因 ………………………………………………....4. 2.2. 補震方式 ………………………………………………...……..5. 第三章. 理論與分析. 3.1 多透鏡組合系統 ………………………………………..………7 3.2. 正負正薄透鏡 decenter 分析 …………………………………8. 3.3 正正負薄透鏡 decenter 分析 ………………………………..13 3.4 模擬數據 ………………………………………………………14 第四章. 結論 ………………………………………………………..….18. 參考文獻 ……………………………………………………………...…..19. iii. 逢甲大學學生報告 ePaper(2005 年).
(5) 光學防手震鏡頭設計. 第一章. 緒論. 1.1 研究動機與方向 薄型數位相機雖然使用上較輕鬆,卻容易因為手振而出現鏡頭模糊的 現象,如果雙手力道不足,又長時間連續拍攝,無論使用多輕巧無負擔 的機種也會出現手振狀況,加上機身重量過輕,雙手的穩定性反而不 夠,一有風吹草動,很容易拍出模糊不清的影像。 就人為操作而言,過於輕量、超薄或是快門鍵太小不好按的數位相 機,手持時容易產生晃動,拍照時以單手操作相機,或是相機握得太緊, 也容易產生晃動畫面,如果相機中具備「防手振」功能,就可以減少個 人操作時的晃動情形,輕鬆拍出完美照片。 捕捉動態影像時特別能展現防手振的功能,像是在火車中拍攝移動 中的風景,或是拍攝好動的小動物、小朋友,假設環境光線不足,數位 相機的光圈與快門勢必有所調整,這種情形下,打閃光燈效果一定不好 看,所以經常使用禁制閃光,如此一來快門時間必定拉長,被攝主角早 已逃之夭夭,照片看起來當然不清不楚。當景物較遠、必須將鏡頭拉近 的情況下,也容易拍出晃動的照片,光學防手振的補償功能,就能在望 遠距離拍攝時發揮穩定畫面的作用,補償高倍望遠拍照時容易產生的晃. 1. 逢甲大學學生報告 ePaper(2005 年).
(6) 光學防手震鏡頭設計. 動現象。 在室內、陰天、夜間等光線較暗的場所,也特別容易產生晃動的情 況,無法捕捉完整的畫面,遇上這些特殊情況,雖然大多數使用者會啟 用相機預設的拍攝模式,但效果不彰。像是一般在室內拍照時,若相機 感應光線不夠,會強制使用閃光燈,但閃燈直射下容易使主體看起來過 於僵硬,拍攝人物也會留下明顯的曝光痕跡、背景相對變暗;若不使用 閃光燈的話,快門速度則必須延長藉以取得更多的光量,否則照片容易 曝光不足。若相機本身沒有內建防手振功能,可能因為光線不足時快門 時間必須拉長,讓手振狀況相對明顯。防手振相機雖不能完全避免手振 現象,但可以大幅提升在慢速快門中拍出清晰室內照片的機率。. 2. 逢甲大學學生報告 ePaper(2005 年).
(7) 光學防手震鏡頭設計. 1.2. 章節概述 本篇論文目前共分為三章,第一章為緒論,第二章為防手震簡介,. 第三章為理論與分析,第四章結論。. 3. 逢甲大學學生報告 ePaper(2005 年).
(8) 光學防手震鏡頭設計. 第二章. 防手震簡介. 2.1 手震三大原因 2.1.1 長焦距拍攝 無論拍攝人像、雀鳥、運動甚至風景照片,很多時我們都會使用長 焦距鏡頭,一來可以用淺景深突出主體,二來長焦鏡頭可以將遠距離的 主體放大,三來鏡頭的平面化及剪裁效果可以令構圖更加簡潔有力。. 由於長鏡頭會將相機的震動放大,因此手震的影響較廣角鏡頭明顯 得多,如果快門速度不能達到安全快門(等效焦距的倒數)的要求,我 們就不能手持拍攝拍出清晰的影像。要解決這個問題,以往只有使用三 腳架、或大光圈鏡頭幾種方法。. 2.1.2 弱光環境拍攝 在室內、黃昏等弱光源環境,相機會將快門速度調得較慢以增加入 光量,這時即使用廣角鏡都會有手震的機會。提升 ISO 會增加相片的 雜訊,使用閃燈又會破壞環境原有的氣氛,實在是令人相當頭痛。這時 只要使用光學防手震系統,即使快門速度比安全快門慢 3 級,大家仍. 4. 逢甲大學學生報告 ePaper(2005 年).
(9) 光學防手震鏡頭設計. 然可以放心手持拍攝。. 2.1.3 微距拍攝 另一個最容易出現手震的情況是微距攝影,細微的對象在鏡頭的高 倍放大之下,輕微震動亦都會變得相當明顯。以往三腳架幾乎是微距攝 影的必備器材,現在只要利用光學防手震系統,微距攝影的手震問題便 可以輕易解決。. 2.2 補正方式 近幾年防手震技術已發展出許多種不同的補正方式,大致上可以分 為四大種類,第一種為電子式補正,其方法為利用電子方式縮小 CCD 或 CMOS 上可用的區域,當相機震動時,成像面在 Sensor 上發生偏移, 這時即可用 Sensor 上預留的部份來把偏移的像面補正回來,其缺點為 可用像素減少;第二種為影像處理補正方式,這個方法是適用於連續影 像,利用電腦運算來補償震動軌跡,缺點為運算量太大;第三種為機構 方式補正,利用整個鏡頭或是 Image sensor 的移動來補正因為手震而產 生的像面偏移,這個方法也是目前市面上相機常用的防手震方法之ㄧ, 但其缺點為機構的精度要求非常高;第四個方法光學式補正即是本文的 重點,它又分為可變稜鏡和鏡片偏移兩種方式,可變稜鏡是利用可變頂. 5. 逢甲大學學生報告 ePaper(2005 年).
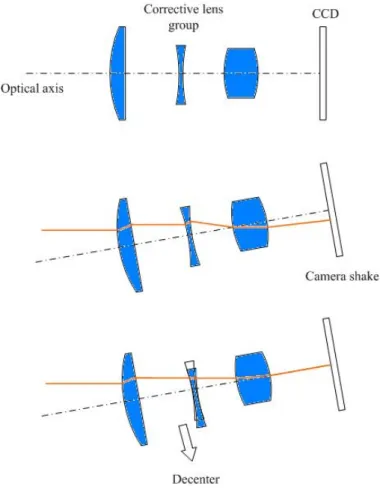
(10) 光學防手震鏡頭設計. 角稜鏡改變光路偏折,來達到防震的效果,而本文所用的則是另一種鏡 片偏移的方法,利用徑向移動補償鏡片,再搭配光學設計,即可在不失 真的情況下達到非常好的補正效果,如圖 2.1。. 圖 2.1 光學式補正系統. 6. 逢甲大學學生報告 ePaper(2005 年).
(11) 光學防手震鏡頭設計. 第三章. 3.1. 理論與分析. 多透鏡組合系統 通常一個光學系統是由許多分離透鏡組合而成。用每一透鏡的焦. 距和元件間的距離來處理要比用折射面逐面處理來的方便。. 圖 3.1 主平面為放大率等於 1 的兩平面 如圖 3.1 所示,物距 l 是物與第一主平面的距離,像距 l’是像與第二 主平面的距離。兩主平面為放大率為 1 的共軛面,如果一物點所發出的 光線交第一主平面的高度為 y,則此光線將以相同的高度 y 由第二主平 面射出。光線的傾斜角可以表示為: u=. y y 和 u' = l l'. 上式代入到 Gauss 式. 1 1 1 中,可得: = + l' l f '. u' = u + yφ 其中 φ =. 1 f'. 對於由一透鏡轉移至下一透鏡的表示是為:. 7. 逢甲大學學生報告 ePaper(2005 年).
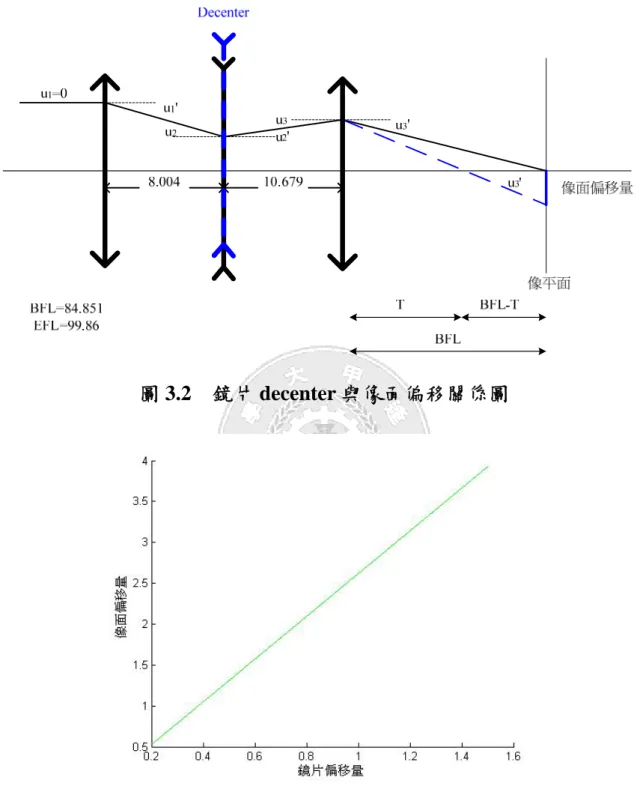
(12) 光學防手震鏡頭設計. y 2 = y1 − d 1 ' u1 ' u2 = u1 ' 其中下標"1"表示前透鏡和"2"表示後透鏡, d 1 ' 是前面透鏡第 二主平面至後透鏡第一主平面之間的距離。以上公式都是假定透鏡的周 圍介質為空氣。. 3.2. 正負正薄透鏡 decenter 分析 如圖 3.2 為典型的正負正(+-+)Triplet 三合透鏡,假設一束無窮遠. 的光入射到透鏡,當第二片透鏡 decenter 後,像面會有一定的偏移量, 且與 decenter 方向相反。利用 3.1 光線追跡的公式結合 MATLAB,即 可求得系統的有效焦距 EFL 和後焦 BFL,還有透鏡偏移量與像面偏移 的關係,如下圖 3.3 所示。. u3 =震動前光線離開最後一面透鏡的角度 u3 ' =震動後光線離開最後一面透鏡的角度 T=最後一面到上光線與光軸交點的距離 焦點偏移量=(BFL – T) * u3 '. 8. 逢甲大學學生報告 ePaper(2005 年).
(13) 光學防手震鏡頭設計. 圖 3.2 鏡片 decenter 與像面偏移關係圖. 圖 3.3 鏡片 decenter 量對焦點偏移圖 假設手震動後,原來為平行入射的光線現在偏離了某個角度,如圖. 3.4 所示,使得成像面產生了不正常的偏移,進而產生模糊的成像。. 9. 逢甲大學學生報告 ePaper(2005 年).
(14) 光學防手震鏡頭設計. u1=0 u1'. u3 u2 '. u2. u3' 像面偏移量. 8.004. 10.679. u3 '. 像平面 T BFL=84.851 EFL=99.86. BFL-T BFL. 圖 3.4 震動後光線追跡圖. T=最後一面到下光線與光軸交點的距離 焦點偏移量=(BFL – T) * u3 '. 圖 3.5 手震角度對焦點偏移圖 由以上的分析可以知道,當震動時光線偏移某個角度,而成像面偏 移到原來的焦點上方的位置,因此可利用上述鏡片 decenter 的作法,來. 10. 逢甲大學學生報告 ePaper(2005 年).
(15) 光學防手震鏡頭設計. 使像面向下偏移來補償像面不正常的偏移。 假設 vibration angle 為-0.035 時,成像偏移量為 3.4952,接著回到最 上面的程式找到能使像點偏移 3.4952 所需 decenter 的量為 1.335 左右, 再把震動角度與 decenter 一起帶到程式裡,可以發現像面中心已經被補 償回震動前的位置。 把上面兩個程式做一個結合,即可畫出當 vibration angle 為某個角 度時, 鏡片 decenter 量對像面偏移量的圖,如圖 3.6,當像面偏移量為. 0 時,所對應到的鏡片偏移量就是我們要找的補償鏡組所需移動量。. 圖 3.6 鏡片 decenter 量對焦點偏移圖. 表 3.2 (+-+)震動後鏡片所需 decenter 的量. 11. 逢甲大學學生報告 ePaper(2005 年).
(16) 光學防手震鏡頭設計. 手震角度(徑度量). -0.02. 鏡片所需 decenter 量(mm). 3.3. -0.025. -0.03. -0.035. -0.04. 0.7638 0.9547 1.1456 1.3366 1.5275. 正正負薄透鏡 decenter 分析. 圖 3.7. 鏡片 decenter 與像面偏移關係圖. T=最後一面到下光線與光軸交點的距離 焦點偏移量=(BFL – T) * u3 '. 12. 逢甲大學學生報告 ePaper(2005 年).
(17) 光學防手震鏡頭設計. u1=0 u1'. u3 u2'. u2. u3' u3'. 20.12. 像面偏移量. 10.38 -u3'. 像平面 T. BFL=8.97 EFL=39. BFL-T BFL. 圖 3.8 震動後光線追跡圖. 表 3.3 (++-)震動後鏡片所需 decenter 的量 手震角度(徑度量) 鏡片所需 decenter 量(mm). 0.02. 0.025. 0.03. 0.035. 0.04. 0.045. 0.8328 1.0410 1.2492 1.4573 1.6655 1.8737. 3.4 設計與模擬 這個例子是參考美國專利 U.S. 5638210,這是一個正正負的三群變 焦鏡頭,第二群之中包含了前群和後群的透鏡,這兩個鏡組構成了一個 可在垂直光軸上移動的防震鏡組。以往傳統的光學防震系統,大部分是 移動整個鏡頭或是移動第一群的透鏡使光線偏折,但這些方法都有同樣 的問題,那就是鏡片太大或太重,使得在機構設計上困難重重,因此本 設計以系統中體積最小的透鏡 13~17 面來做為補償鏡組,如圖 3.9 所示。 13. 逢甲大學學生報告 ePaper(2005 年).
(18) 光學防手震鏡頭設計. 圖 3.9 系統 layout 圖. 表 3.4 系統規範 使用波段. 可見光. F/#. 4.08~8.05. 半視場角. 28.6~11.65(deg). 焦距範圍. 38.8 ~ 102.1(mm). 變倍比. 2.63. 系統全長. 112.8~92.3~70.9(mm). 14. 逢甲大學學生報告 ePaper(2005 年).
(19) 光學防手震鏡頭設計. 表 3.5 系統參數 Surface Radius(mm) Thickness(mm) Material Infinite. air. Refractive index Abbe number. 1. -114.155. 1.5. LASF36A 1.80384. 2. 34.074. 1. air. 3. 34.383. 5.3. SSK2. 4. -45.27. 0.1. air. 5. 30.065. SK55. 6. 73.586. 2.6 3.23~17.06. 7. -22.875. 8. 33.9. 1.61720. 54.0. 1.62041. 60.1. 1.1. LANSFN30 1.80411. 46.5. 13.576. 3.1. SF3. 1.7400. 28.2. 9. -88.72. 0.8. air. 10. -491.918. 2. BK7. 1.5168. 64.1. 11. -19.079. 2. air. 12. Infinite. 2. air. 13. -14.37. 5.7. PK50. 1.5186. 69.9. 14. -9.069. 1.4. SFL57. 1.86074. 23.0. 15. -13.774. 0.1. air. 16. 70.726. PK50. 1.5186. 69.9. 17. -26.349. 2.7 15.029~3.19. 18. -47.072. 3.4. SF4. 1.7552. 27.6. 19. -18.922. 2.2. air. 20. -17.796. 1.3. LASF3. 1.84042. 43.3. 21. -124.763. 4. air. 22. -16.876. LAKN14. 1.6968. 55.6. 23. -46.779. 1.4 8.97~48.89. air. air. 15. 逢甲大學學生報告 ePaper(2005 年).
(20) 光學防手震鏡頭設計. 圖 3.10 3D layout 圖. 假設手震角度為 0.035 徑度量(2.0055°),在視場角 Field 的操作視窗 裡,把原本零度視場角改為 2.0055°的視場,即可在第 23 面成像面看到 像高從 0.0099 變到 1.3742,這也代表整個成像面偏移了 1.3643,接著. decenter 第二群裡的後群透鏡第 13 到第 17 面 1.4573mm,如圖所示, 像高可從 1.3742 變回到 0.055 的地方,成功地把像面校正回接近震動前 的位置。. 圖 3.11. 震動前模擬數據. 16. 逢甲大學學生報告 ePaper(2005 年).
(21) 光學防手震鏡頭設計. 圖 3.12 震動後模擬數據. 圖 3.13 補正後模擬數據. 17. 逢甲大學學生報告 ePaper(2005 年).
(22) 光學防手震鏡頭設計. 第四章. 結論. 本篇論文提出光學式補正的防手震光學系統設計,在模擬結果中, 利用補償鏡組在垂直光軸方向移動,成功補正了像面不正常的偏移,使 得在望遠距離拍攝時發揮穩定畫面的作用,補償高倍望遠拍照時容易產 生的晃動現象。在未來,我們將再進一步研究補正後鏡片偏移對像差的 影響,還有消除補正時所產生的像差,進而找出補償的極限。並且運用 光學設計軟體 ZEMAX 的優化功能來提升此防震光學系統的性能。. 18. 逢甲大學學生報告 ePaper(2005 年).
(23) 光學防手震鏡頭設計. 參考文獻 [1] R. Barry Johnson and Chen Feng, “Mechanically Compensated Zoom Lenses with a Single Moving Element,” Appl. Opt. Vol. 31, P2274-2278, 1992. [2] Takayuki Itoh, “Compact Wide-angle Zoom Lens,” Patent U.S. 4726665, 1988. [3] Takayuki Ito, “Shiftable Lens System,” Patent U.S. 5539576, 1996. [4] M. S. Yeh, S. G. Shiue, and M. H. Lu, “First-order Analysis of a Three-lens Zoom System with the Last Lens Fixed,” Journal of Modern Optics, Vol. 45 No. 2, pp.363-375, 1998. [5] Susumu Sato, “Zoom Lens Having Anti-vibration Optical System,” Patent U.S. 5530589, 1996. [6] Susumu Sato, “Zoom Lens Having a Vibration Correcting Optical System”, Patent U.S. 5638210, 1997. [7] Thomas H. Jamieson, “Thin-lens Thory Of Zoom Systems,” OPTICAL ACTA, vol. 17, no. 8, 565-584. [8] Ryan M. Smith, “Image-shifting Optics for a Nystagmus Treatment Device”, JRRD, vol. 41, no. 3A, pp. 325-336. [9] Yaw-Tzong. Tang,. “Testing. of. Aspheric. Surfaces. with. Computer-Generated Hologram by Using a Novel Interferometric Set-up,” CHINESE OF JORNAL PHYSICS, vol. 30, 1992. [10] T. ChunKan, “Design of Zoom System by the Aarifocal Differential Equation. I. ,” Appl. Opt., vol.31, no. 13, pp. 2265-2268, 1992.. 19. 逢甲大學學生報告 ePaper(2005 年).
(24) 光學防手震鏡頭設計. 1. 逢甲大學學生報告 ePaper(2005 年).
(25)
數據


+2

Outline
相關文件
Promote project learning, mathematical modeling, and problem-based learning to strengthen the ability to integrate and apply knowledge and skills, and make. calculated
We need a whole-school approach, together with joint efforts made at different levels, ranging from the system to the school organisation, the school curriculum (including
This kind of algorithm has also been a powerful tool for solving many other optimization problems, including symmetric cone complementarity problems [15, 16, 20–22], symmetric
In order to solve the problems mentioned above, the following chapters intend to make a study of the structure and system of The Significance of Kuangyin Sūtra, then to have
Microphone and 600 ohm line conduits shall be mechanically and electrically connected to receptacle boxes and electrically grounded to the audio system ground point.. Lines in
Biases in Pricing Continuously Monitored Options with Monte Carlo (continued).. • If all of the sampled prices are below the barrier, this sample path pays max(S(t n ) −
“A Comprehensive Model for Assessing the Quality and Productivity of the Information System Function Toward a Theory for Information System Assessment.”,
According to analysis results, the system satisfaction have nearly 43% variance explained by system quality, information quality, training experience and
