大華科技大學
電機與電子工程系碩士班
碩士論文
CompactRIO 嵌入式系統設計應用於
無刷直流馬達定速控制之研究
Application of CompactRIO
Embedded System Design to Speed
Control of Brushless DC Motor
研究生:邱奕境
指導教授:謝 劍 書 博 士
CompactRIO 嵌入式系統設計應用於無刷直流馬達定速
控制之研究
Application of CompactRIO Embedded System Design to
Speed Control of Brushless DC Motor
研究生:邱奕境
Student:Yi-Jing Chiu
指導教授:謝劍書博士 Advisor:Dr. Chien-Shu Hsieh
大華科技大學
電機與電子工程系碩士班
碩士論文
A Thesis
Submitted to Department of Electrical and Electronic Engineering College of Engineering and Design
Ta Hwa University of Science and Technology in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Electrical and Electronic Engineering July 2019
Hsinchu, Taiwan, Republic of China 中華民國 一○八 年 七 月
I
摘要
嵌入式系統設計是近幾年新發展的科技,目前已廣泛的應用於手機 和馬達控制等領域,而無刷直流馬達因具備有刷直流馬達簡易控制和交 流馬達體積小耐用的優點,近年成為伺服馬達設計之新寵。因此,如何結 合兩者,開發一個以嵌入式系統設計為基礎之無刷直流馬達定速控制器, 成為一個很重要的工業實際應用。本研究使用的是美商國家儀器公司所 生產的 CompactRIO 系統,屬於一種開放式的嵌入式系統設計架構,其內 部由 RT Controller、FPGA Chassis、C series modules 所組成,配合使用圖 型化程式語言 LabVIEW,即可順利達成無刷直流馬達定速控制的嵌入式 系統設計。本論文針對 NI CompacRIO-9066 及其內建的 C Series Module NI9502 馬達控制器,並藉由 LabVIEW FPGA Module 搭配 LabVIEW SoftMotion Module 的馬達控制 VI,嘗試結合下面三種技術:無刷直流馬達速度控 制、嵌入式系統設計及 LabVIEW 程式語言設計,開發一個以嵌入式系統 及 LabVIEW 為設計基礎之無刷直流馬達定速控制之應用實例。實驗結果 證明所設計嵌入式系統,確能成功的達到無刷直流馬達定速控制之目的。 關鍵字:無刷直流馬達速度控制、嵌入式系統設計、NI CompactRIO 系統、 LabVIEW。
II
Abstract
Embedded system design is a newly developed technology, which has been widely used in mobile phones and motor control fields. Due to easy control, small size and durability, brushless DC motors have become the new favorite of servo motor design. Therefore, how to develop an embedded system-based brushless DC motor fixed speed controller design become an important industrial practical application. This study uses the NI CompactRIO system, which is an open embedded system architecture and is composed of RT controller, FPGA Chassis and C series modules. Combined with the graphical programming language LabVIEW, the embedded system design of the brushless DC motor fixed speed controller design can be successfully achieved. This thesis is aimed at the study of NI CompacRIO-9066 and its built-in C Series Module (NI9502 motor controller), the LabVIEW FPGA Module, and the LabVIEW SoftMotion Module’s motor control VI. The aim of the research is attempted to combine the following three technologies: brushless DC motor speed control, embedded system design and LabVIEW programming language design, in order to develop an embedded system and LabVIEW-based fixed speed controller design of brushless DC motors. Simulation results verify the usefulness of the study.
Keywords: Brushless DC motor velocity control, Embedded system design, NI CompactRIO system, LabVIEW.
III
誌謝
首先要感謝謝劍書教授於此論文的指導 NI CompactRIO 與 LabVIEW 等相關硬體以及軟體,讓學生有機會學習,由於學生沒有學習過相關控制 理論也沒有使用過 NI 國家儀器 CompactRIO 以及 LabVIEW 等系列產品 的經驗,以致在學習過程中遭遇不少困難,但是在老師指導下一個一個克 服,總之要感謝老師的耐心指導與系上老師的教學與家人的支持,讓我完 成論文。IV
目錄
中文摘要 ... I 英文摘要 ... II 誌謝 ... III 目錄 ... IV 表目錄 ... VI 圖目錄 ... VII 第一章 緒論 ... 1 1.1. 研究動機與背景 ... 1 1.2. 研究目的 ... 2 1.3. 文獻回顧 ... 3 1.4. 論文架構 ... 5 第二章 CompactRIO 嵌入式系統 ... 6 2.1. CompactRIO 簡介 ... 6 2.2. CompactRIO 硬體架構 ... 8 2.3. NI C 系列模組-9502 ... 11 2.4. CompactRIO 設計特點 ... 13 2.5. CompactRIO 軟體安裝 ... 14 2.6. NI MAX 設定與配置 ... 17 第三章 無刷直流馬達 ... 23 3.1.無刷直流馬達簡介 ... 23 3.2.無刷直流馬達數學模型 ... 27V
第四章 系統設計與實驗結果 ... 30
4.1.LabVIEW 軟體設定 ... 30
4.1.1.建立 Targets and Devices ... 32
4.1.2.新增以及部署 FPGA ... 35 4.2. 無刷直流馬達定速控制之 LabVIEW 程式設計 ... 40 4.3. 無刷直流馬達定速控制之 LabVIEW 人機介面設計 ... 43 4.4. 馬達定速控制實驗 ... 49 4.4.1.實驗參數設定 ... 49 4.4.2.實驗結果 ... 51 第五章 結論與未來研究方向 ... 53 5.1.結論 ... 53 5.2.未來研究方向 ... 53 參考文獻 ... 54
VI
表目錄
表 3.1 有刷直流馬達與無刷直流馬達差異表 ... 26 表 3.2 無刷直流馬達的優點分析表[13] ... 27 表 3.3 與電磁力相關之物理量及其(SI)單位[13] ... 31
VII
圖目錄
圖 1-1 CompactRIO9066 與 C Series Module 9502 的實際拍攝圖 ... 2
圖 2-1 CompactRIO-9066 全機型實體圖 ... 7
圖 2-2 NI PS-16 電源供應器 ... 8
圖 2-3 CompactRIO-9066 控制器 ... 9
圖 2-4 NI CompactRIO 面板 (NI9066) ... 10
圖 2-5 可重配置 I / O 機箱 ... 11
圖 2-6 NI C Series modules (NI9502) ... 12
圖 2-7 NI C Series modules 9502_IO 接線圖 ... 12
圖 2-8 安裝步驟 1 ... 14 圖 2-9 安裝步驟 2 ... 15 圖 2-10 安裝步驟 3 ... 15 圖 2-11 安裝步驟 4 ... 16 圖 2-12 安裝步驟 5 ... 16 圖 2-13 安裝步驟 6 ... 17 圖 2-14 安裝步驟 7 ... 17 圖 2-15 NI Measurement&Automation Explorer... 19 圖 2-16 CompactRIO 未連接與已連接狀態 ... 19 圖 2-17 NI MAX 自動分配 IP Addressing ... 20 圖 2-18 展開 Software... 20 圖 2-19 點選 Add/Remove Software ... 21 圖 2-20 Log In 介面 ... 21
VIII
圖 2-21 Real-Time Software Wizard ... 22
圖 3-1 無刷直流馬達驅動電路及結構圖[11] ... 24
圖 3-2 弗來明之左手定則[12] ... 24
圖 3-3 有刷直流馬達和無刷直流馬達的靜態與動態特性比較[13] ... 25
圖 3-4 全橋變流器及電樞等效電路[11] ... 29
圖 3-5 無刷直流馬達控制方塊圖[11] ... 29
圖 4-1 LabVIEW Command Windows ... 30
圖 4-2 開啟專案(Create Project)視窗_1 ... 31
圖 4-3 開啟專案(Create Project)視窗_2 ... 31
圖 4-4 建立新的 Targets and Devices... 33
圖 4-5 Add Targets and Devices ... 33
圖 4-6 Select Programming Mode ... 34
圖 4-7 Discover C Series Modules ... 34
圖 4-8 Discovery Status ... 35
圖 4-9 建立新的 FPGA Target ... 36
圖 4-10 Deploy CompactRIO Chassis Settings ... 37
圖 4-11 Deployment Progress... 37 圖 4-12 Mod 拖曳前示意圖 ... 38 圖 4-13 Mod 拖曳完成 ... 39 圖 4-14 無刷直流馬達速度控制流程圖[1] ... 40 圖 4-15 Status Loop ... 41 圖 4-16 Velocity Loop ... 41 圖 4-17 Current Loop ... 42
IX
圖 4-18 PWM Loop ... 42
圖 4-19 Host.vi 程式 ... 44
圖 4-20 Change FPGA 連結 ... 44
圖 4-21 Change FPGA Target ... 45
圖 4-22 Configure Open FPGA VI Reference ... 45
圖 4-23 Open FPGA VI 人機介面 ... 46
圖 4-24 RUN FPGA VI 人機介面 ... 47
圖 4-25 Select Compile Server ... 47
圖 4-26 Generating Intermediate Files ... 48
圖 4-27 燒錄檔案中 ... 48 圖 4-28 Host.vi 人機介面(未設定參數) ... 49 圖 4-29 本論文所使用之無刷直流馬達 ... 49 圖 4-30 馬達設定參數 ... 50 圖 4-31 實驗設定參數 ... 51 圖 4-32 實驗結果波形為 5 rps ... 52 圖 4-33 實驗結果波形為 10 rps ... 52 圖 4-34 實驗結果波形為 20 rps ... 52
1
第一章 緒論
1.1.研究動機與背景 隨著硬體科技的進步以及學術的發展,特別是近幾年來電腦計算能 力大幅提升,控制設計不再像以往那樣昂貴和困難實現,因此控制的應用 在各行各業中迅速擴大,如航太科技、風力發電、汽車、交通運輸與製造 業等等,且佔有非常重要的地位。在未來的各行各業中,控制系統能幫助 人們利用更少的人力和更高效率的方式來完成各種工作,且一個優良的 控制系統設計更可幫助公司創造高品質、低成本以及較低的危安事件。因 此,如何設計一個優異的控制系統是值得我們深入研究的課題。 美商國家儀器(NI)所發展之 CompactRIO 嵌入式系統具備有高效能處 理功能、感測器專屬的 I/O,以及緊密整合的軟體工具鏈,相當適合運用 在工業物聯網 (IIoT)、監控與控制等應用領域中。另外,輔以 LabVIEW 圖形化程式設計軟體,CompactRIO 更以精巧的體積、堅固耐用的特性、 整合開放式的嵌入架構及可搭配多樣的類比、數位、通訊 I/O 及運動控制 等模組,來從事有效率的嵌入式系統設計。更重要的是, CompactRIO 系 統搭載強大的浮點處理器、可重設 FPGA、I/O 模組,可進而縮短產品上 市時間並降低機器/嵌入式裝置的開發成本,且不需要大型的工程設計團 隊,即可讓工程師輕鬆製作原型,並佈署客制化的嵌入式監控系統,因而 很適合工程師的深入研究。 基於上述理由,本論文的研究動機即在開發一個以 CompactRIO 為基 礎之嵌入式系統設計,並從中了解到 LabVIEW 圖形化程式設計的技巧。2 1.2.研究目的 馬達相關產品已成為民眾日常生活中不可或缺的工具,而無刷直流 馬達因具備有刷直流馬達簡易控制和交流馬達體積小耐用的優點,成為 最近伺服馬達設計之趨勢,其中速度控制更成為無刷直流馬達其中一個 很重要的應用。另外,誠如前節研究動機所言,CompactRIO 系統具備有 開發各式監控與控制等嵌入式應用產品的能力,且 LabVIEW 圖形化程式 更是現今程式設計的標準。因此,本論文研究目的即在於結合上述三種技 術:無刷直流馬達速度控制、嵌入式系統設計及 LabVIEW 程式語言設計, 開發一個以嵌入式系統及 LabVIEW 為設計基礎之無刷直流馬達定速控 制之應用實例。
由於 CompactRIO 本身需要安裝 C Series Module(包含馬達驅動器),
才能實現馬達速度控制目的。因此,本論文使用 CompactRIO9066 與 C Series Module 9502(如圖 1-1 所示)來達到上述論文研究目的。
3 1.3.文獻回顧 LabVIEW 提供圖形化程式設計能力,協助我們開發各式工程領域的 應用,包括硬體設定、量測資料與除錯[2]。這項呈現功能讓我們易於整 合來自任何廠商的量測硬體、以程式圖顯示複雜邏輯、開發資料分析演算 法,以及設計客制化工程使用者介面。因此,利用 LabVIEW 圖形化程式 設計工具,我們可輕易實現倒單擺控制[3][4]。羅士堯[3]以 LabVIEW 圖 控式軟體實現雙連桿倒單擺系統甩上與平衡控制 LQR、極點配置及 PID 控制法則。范銘峰[4]利用 LabVIEW 圖控式軟體及 ROTPEN 機台,來研 究旋轉式倒單擺系統之非線性控制實現問題。 CompactRIO 是美商國家儀器的產品之一,主要的功能在於執行系統 控制與資料擷取,內部有 FPGA、Real-Time controller 等技術,廣泛應用 於各個領域之中。以嵌入式系統為例,何全淇[5]使用 CompactRIO 嵌入 式系統研究兩輪直立式機器人,其中兩輪平衡車類似倒單擺控制系統,為 一種非線性且具有非極小相位(non-minimum phase)之不穩定系統。郭閔文 [6]使用 ARM Cortex M4 嵌入式系統研究佈署監控系統,運用聯發科技公 司的 SoC,結合感知器透過腳本設計在 Cortex M4 的 SoC 上執行程式, 而後結合 PAN 的藍牙與 WLAN 的 WIFI 來佈署系統解決方案,在蒐集完 資料以後,上傳雲端進行雲端儲存與計算;再透過 MIPS 的 SoC,運用隸 屬於 OpenWrt 的 Linux 分支,進行錄影而後上傳到雲端備存,最後結合 安全警示來達成目標佈署監控系統以及雲端整合目的。劉宗旻[7]使用 ARM Cortex-M3 嵌入式系統,在 μC/OS-III 作業系統中定義了七種不同的 任務阻斷狀態,由延遲 (Delay)、等候 (Pend)與中止 (Suspend)三種基本 狀態疊加而成,以 ARM Cortex-M3 作為開發平台,並透過 μC/OS-III 作
4
業系統核心所維護的任務控制區塊取得各別任務在不同的阻斷狀態下所 擁有的特性,研究所提出的任務阻斷時間分析模組、處理器休眠時間計算 模組及系統時間恢復模組實作以任務為基準的動態電源管理,使系統達 到省電的目的,並且盡可能減少對使用者或是任務的延遲影響。張俊韋[8] 使用 ARM Cortex-M3 嵌入式系統且利用 ARM Cortex-M3 的記憶體保護 單元,在 µC/OS-III 即時作業系統實現記憶體保護功能。ARM Cortex-M3 微處理器的 Thread 模式和 Handler 模式與特權和非特權的不同存取等級, 搭配其記憶體保護單元,並藉由適當的記憶體配置管理設計,達到防止 µC/OS-III 的核心資料和堆疊被應用程式存取,且各應用程式之間的資料 和堆疊不可互相存取,以及堆疊溢出的偵測,研究 µC/OS-III 的記憶體保 護策略。唐偉倫[9]使用 Arduino ,研究氧化鋅奈米柱酸鹼值感測器之無 線感測系統將感測器及參考電極放入不同酸鹼值的緩衝溶液中進行電位 測定分析,pH 值測量範圍為 pH4、pH6、pH7、pH8、pH10。測量結果得 到氧化鋅奈米柱感測器對於酸鹼值平均靈敏度為 44.56mV/pH,線性度為 0.983。最後利用 Arduino Uno 開發版用來當作數據收集端。吳志元[10]使 用 8051 微控制器,研究泛用型遠端監視系統遠端利用微控制器提供的串 列傳輸埠,藉由數據機調變/解調變後,再由傳輸媒介 Public Switched Telephone Network(PSTN)連接遠端,以達到遠端傳輸的目的。 在本論文中,我們將研究中心放在利用 CompactRIO9066 與 C Series Module 9502,來開發一個無刷直流馬達定速控制之應用實例。
5 1.4.論文架構 本論文共分為五個章節,分別為: 第一章 緒論。本章述明本論文研究動機與背景、研究目的、相關參考文 獻回顧及所採用研究方法說明,最後介紹本論文架構。 第 二 章 CompactRIO 嵌 入 式 系 統 。 首 先 , 在 2.1 節 我 們 簡 介 何 謂 CompactRIO 系統,其次在 2.2 節及 2.3 節中我們分別介紹 CompactRIO 硬體架構和 NI C 系列模組-9502,接續在 2.4 節介 紹 CompactRIO 主要功能,在 2.5 節介紹 CompactRIO 軟體安裝, 最後在 2.6 節中我們介紹 NI MAX 設定與配置。 第三章 無刷直流馬達。首先,在 3.1 節我們簡介何謂無刷直流馬達,並 說明其特點和優點,最後在 3.2 節中我們介紹無刷直流馬達數學 模型之推導。 第四章 系統設計與實驗結果。首先,在 4.1 節我們介紹.LabVIEW 軟體 設定,其次在 4.2 節中我們介紹無刷直流馬達定速控制之 LabVIEW 程式設計結果,接續在 4.3 節介紹 LabVIEW 人機介 面設計結果,最後在 4.4 節中我們介紹實驗參數設定與實驗結 果。 第五章 結論與未來研究方向:本章節綜整本論文之結論,並針對部分研 究成果未周全之情形,提出未來可行之研究議題。
6
第二章 CompactRIO 嵌入式系統
2.1. CompactRIO 簡介
美商國家儀器(NI)所發展之 CompactRIO(cRIO)平台是以可重設 I/O(RIO)與 NI LabVIEW 現場可編程閘陣列(FPGA)技術為基礎,以精 巧的體積、堅固耐用的特性而整合開放式的嵌入架構,可搭配多樣的 類比、數位、通訊 I/O 及運動控制等模組,來從事有效率的嵌入式系統 設計。透過 LabVIEW 圖形化系統設計(GSD)工具,即可設計 NI RIO 系統,並兼具商用現貨(COTS)系統的簡單易用,還有客制化硬體的效 能。搭配 LabVIEW 的功能與產能,不需大型的工程設計團隊,即可 讓工程師輕鬆製作原型,並佈署客制化的嵌入式監控系統。針對需縮 短上市時間 (如能源、醫療、機器人) 的產業,到進階的控制演算法、 高速的類比與數位 I/O 等,cRIO 均適於建構嵌入式監控應用。NI RIO 系統搭載強大的浮點處理器、可重設 FPGA、I/O 模組,進而縮短上市 時 間 並 降 低 機 器 /嵌 入 式 裝 置 的 開 發 成 本 。 RIO 硬 體 平 台 若 整 合 LabVIEW GSD 軟體,更成為可輕鬆重設的嵌入式系統,讓原始設備製 造商(OEM)與大量部署應用的客制化硬體需求降至最低。此外,在原型 製作與部署階段之間,工程師亦可重複使用相同的 LabVIEW 程式碼, 以進一步縮短上市時間並提高系統穩定度。更重要的是,cRIO 控制器 是根據最嚴格的標準設計而成,並通過廣泛的測試與驗證,可在嚴苛 的工業環境中穩定運作[1]。 cRIO 系統中的控制器已搭載處理器與使用者可程式化 FPGA,同 時還會配置一組或多組由 NI 或第三方廠商所提供的訊號處理 I/O
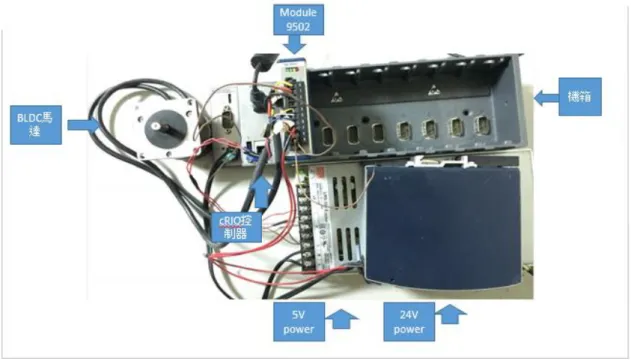
7 模組。這些模組可直接連接感測器,並提供特殊功能。部分 cRIO 控制 器也支援時效性網路 (TSN),也就是標準乙太網路更新版本,有了時 效性網路,就能透過網路來精確同步裝置,進而簡化系統設定。此外, 時效性網路也能在網路中進行流量排程,以實現精確且低潛時的時效 性資料傳輸。cRIO 共包含兩個系列,分別是工業用強化機型,及機板 層級設計,能滿足各種應用需求,無論是原型製作,還是大規模量產, 皆可因應自如[1]。本論文使用的 cRIO 系統是 CompactRIO-9066 機型 (如圖 2-1 所示),CompactRIO-9066 內含控制器與機箱屬於一體成形 但其餘 cRIO 型號則可分離控制器與機箱,其搭配之電源供應器為 NI PS-16(如圖 2-2 所示),其電源規格為單相、115/230 VAC 輸入、24 ~ 28 VDC 輸出及 10 A 輸出。 圖 2-1 CompactRIO-9066 全機型實體圖
8
圖 2-2 NI PS-16 電源供應器
2.2. CompactRIO 硬體架構
本論文所使用的 CompactRIO,其主要硬體為搭載 667 MHz 雙核 心 CPU、256 MB DRAM、512 MB 儲存空間、Zynq-7020 FPGA 及 8 插槽的 CompactRIO -9066 控制器(圖 2-3)。CompactRIO‑ 9066 是一 款嵌入式控制器,適用於進階的控制與監測應用。這款以軟體設計為 主的控制器配備 FPGA,以及搭載 NI Linux Real‑ Time OS 的即時處 理器,同時具有堅固耐用的無風扇設計,控制器配備有多種連接埠,
9
包含 1 個 Gigabit 乙太網路、1 個 USB 主通訊埠、1 個 USB 裝置 與 1 個序列連接埠(其面板設計如圖 2-4 所示)。
10 1.USB 主通訊埠 2.RS-232 序列端口 3.RJ-45 網路端口 4.USB 裝置 5.電源連接 圖 2-4 NI CompactRIO 面板 (NI9066)[1] CompactRIO 具有可重置 I / O 機箱(如圖 2-5 所示),是嵌入式系 統架構的核心。它直接連接到 I / O,以便對每個 module(模組)的 I / O 電路以定時觸發和同步進行高性能連線。由於每個 module 都直接連 接到 FPGA 而不是通過總線,因此與其他控制器架構相比,幾乎不會 遇到系統響應的控制延遲。在連通狀況下,該 FPGA 自動與 I / O module 通信,並為即時處理器提供確定性 I / O 隨插即用(熱插拔),FPGA 使 即時控制器上的程序能夠執行 I / O,其週期小於 500 ns。此外,還可 以直接對此 FPGA 進行編程,以進一步定義系統。由於 FPGA 執行速 度快的原因,該機箱經常被使用於包含高速緩衝 I / O,快速控制環路 或自定義信號濾波的控制器系統設計。例如,使用 FPGA,單個機箱可 以 100 kHz 的速率同時執行 20 多個模擬比例積分微分(PID)控制環 路。另外,由於 FPGA 在硬體中提供了最高的可靠性和確定性,非常
11 適用於基於硬體的互鎖,定制定時和触發,或者消除非標準傳感器和 總線通常所需的定制電路。 圖 2-5 可重配置 I / O 機箱[1] 2.3. NI C 系列模組-9502 本研究論文使用的無刷直流馬達驅動器是 NI C Series NI-9502 運 動控制模組,如圖 2-6 所示。NI 9502 是一款無刷伺服電機驅動器,可 提供輸出以驅動無刷伺服電機,具有霍爾效應傳感器輸入和電源連接, 另外需要連結 9 至 30 VDC 電源,COM 和底盤接地提供連接,具備 4 A 連續/8 A 峰值電流。根據軟體設計,NI 9502 可以在梯形或磁場定 向控制(FOC)換向模式下運行。NI C Series modules 9502_IO 接線圖, 如圖 2-7 所示。
12
圖 2-6 NI C Series modules (NI9502)[1]
1.相位 U 6.霍爾腳位 2
2.相位 V 7.霍爾腳位 3
3.相位 W 8.接地腳位
4.空腳位 9.控制器電源
5.霍爾腳位 1 10.共同接地腳位
13
2.4. CompactRIO 設計特點
採用 CompactRIO 嵌入式設計來開發應用系統,具有下面主要特 點[1]:
(1)透過單一且直覺化的軟體工具鏈,加快開發速度:配備 NI Linux Real-Time、LabVIEW FPGA Module 與 NI-DAQmx 驅動程式,能克服 異質架構設計程式所面臨的傳統挑戰。 在這些項目的相輔相成之下, 設計者將可透過單一且直覺化的軟體工具鏈,同時設計處理器與使用 者可程式化的 FPGA。這些軟體不僅歷經密切整合,更簡單易用,有 助於降低風險、提高生產力,並免除建立與維護 I/O 驅動程式、作業 系統與其他中介軟體的必要性;如此一來,設計者就可以專心一致地 解決問題,而不用分神顧及低階程式設計工作。 (2)準確、精確且值得信賴的時效資料:NI 量測產品與獨家技術 (例如 STC3 時序晶片與 FPGA 驅動程式) 享有卓越的類比設計品質,可提 供值得信賴的資料準確度。CompactRIO 採用模組化的訊號處理架構, 可直接連接感測器,以滿足任何應用需求。部分 CompactRIO 控制器 也支援時效性網路 (TSN),也就是標準乙太網路更新版本。有了時效 性網路,設計者就能透過網路來精確同步裝置,進而簡化系統設定。 此外,時效性網路也能在網路中進行流量排程,以實現精確且低潛時 的時效性資料傳輸。 (3)提供多樣性外型以滿足各類設計需求:CompactRIO 提供封裝與機 板層級等規格,能滿足各種應用需求,無論是原型製作,還是大規模 部署,皆可因應自如。CompactRIO 控制器是根據最嚴格的標準設計而 成,並通過廣泛的測試與驗證,可在嚴苛的工業環境中穩定運作。 (4)開放且安全的平台:設計者可以透過上千種開放原始碼應用程式、
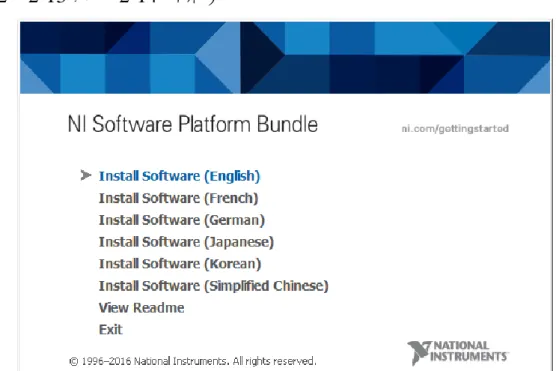
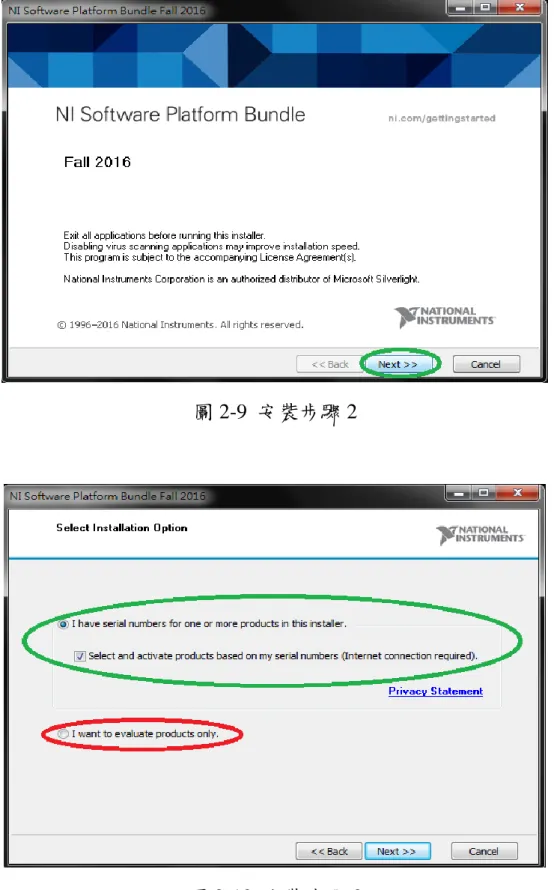
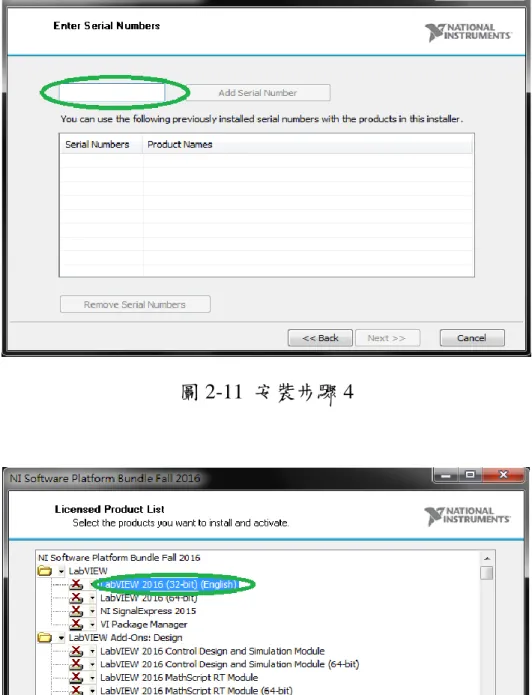
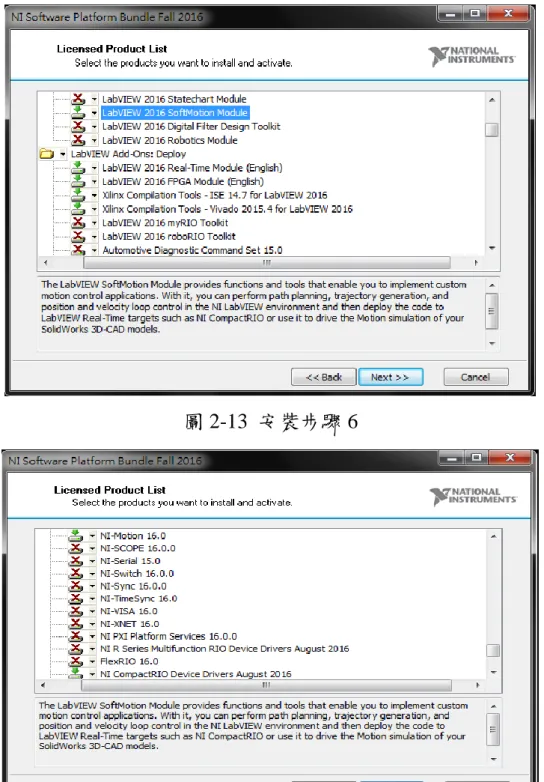
14 IP 與範例,充分發揮 NI Linux Real-Time OS 的開放特性,並與活躍 的使用者和開發人員社群協同合作。此外,只要運用 Security-Enhanced Linux 的原生支援,透過客制化原則建立,來進行強制性存取控制,此 可大幅提高安全性與穩定性。 2.5. CompactRIO 軟體安裝 在使用硬體之前,必須先安裝 CompactRIO 所需軟體和驅動程式。 首先,執行安裝程式如圖 2-8、2-9、2-10 及 2-11 所示,然後即可開始 進入系統安裝程序,進入安裝程序後則可開始選擇所需的安裝軟體。 本 研 究 在 安 裝 CompactRIO 所 需 軟 體 上 , 分 別 安 裝 了 LabVIEW 2016(32-bit)、LabVIEW Real-Time Module、LabVIEW FPGA Module、 LabVIEW 2016 SoftMotion Module、Xilinx Compilation Tools-ISE 14.7 for LabVIEW 2016 、 Xilinx Compilation Tools-Vivado 2015.4 for LabVIEW 2016、NI CompactRIO Device Drivers August 2016(分別如圖 2-12、2-13 以及 2-14 所示)。
15
圖 2-9 安裝步驟 2
16
圖 2-11 安裝步驟 4
17
圖 2-13 安裝步驟 6
圖 2-14 安裝步驟 7 2.6. NI MAX 設定與配置
開啟 NI-MAX (Measurement & Automation Explorer)設定網路,如 圖 2-16 所示,在選擇 Host-Target Network setup 中,HOST 與
18 Target 必須在同一個區域網路內才可線連,且需要關閉防火牆。區域 網路小型使用的是 192.X.X.X,如果像大公司或學校會使用 10.X.X.X。本研究僅需使用小型區域網路 192.x.x.x 即可,所以本系統 的 Static IP 即使用 192.X.X.X。下面即為本研究所使用之網路設 定: IP Address:172.22.11.2 Subnet mask:255.255.255.0
Default gateway:可不設(Host 和 Target 無外連) DNS Servers:可不設(實名與 IP 轉換)
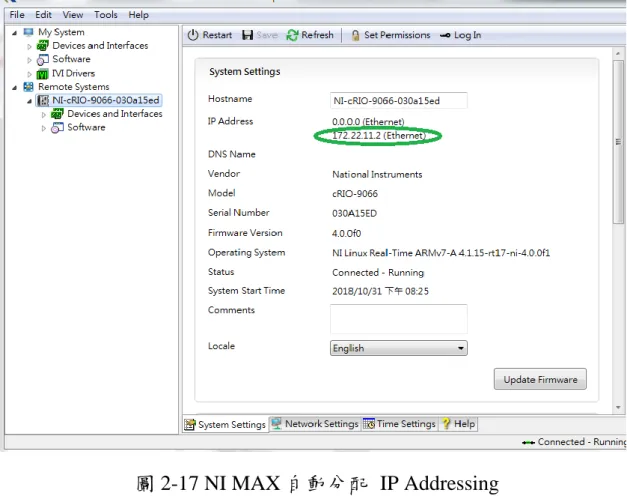
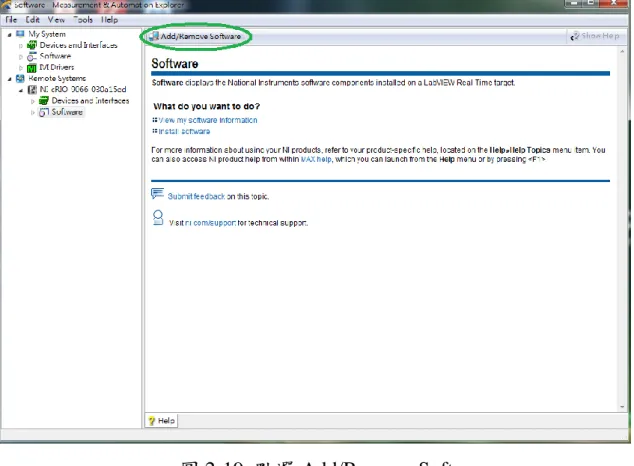
Compact有分使用 IP Addressing 以及USB port,其中IP Addressing 有 三種:DHCP、Link-local、Static IP,而本研究則選擇 USB port。在系 統尚未連接時,NI MAX Remote Systems 會顯示尚未連接,如圖2-17 上圖所示,在接上USB port之後,系統會自動偵測(如仍尚未連結可按 下Refresh鍵),此時系統已連結後的圖是會有所變更,如圖2-17下圖所 示,當已經連結後系統會自動分配IP Addressing給你(圖2-18),接下 來點選並展開Software(如圖2-19所示),其次要點選Add/Remove Software(如圖2-20 所示),然後在進入軟體設置附加組件(Software set add-ons)之前,會彈出需要登入CompactRIO帳號與密碼的視窗,此時預 設使用者名稱:admin 密碼:空白,即可登入(圖2-21)。登入後,視窗 即進入Real-Time Software Wizard(圖2-22)安裝,此時安裝Real-time Software等相關程式時最好與LabVIEW程式版別相同,本研究使用的 是LabVIEW2016,所以Real-time Software等相關程式也需要安裝2016 版本,如圖2-22右方圖所示。
19
圖2-15 NI Measurement & Automation Explorer
20
圖 2-17 NI MAX 自動分配 IP Addressing
21
圖 2-19 點選 Add/Remove Software
22
23
第三章 無刷直流馬達
3.1.無刷直流馬達簡介 從 1980 年代開始,工商產品-電動機,俗稱馬達(motor),其使用量 常被作為顯示一般民眾生活舒適程度之指標。目前,個人電腦、空調 機、吸塵器、冰箱等皆為使用馬達之諸多機器,已成為民眾日常生活 不可或缺家電產品。此外,常見家電產品亦可使用多種不同型態之馬 達,其中無刷直流馬達(Brushless DC motor/BLDC motor)所佔有之比率, 則年年快速增加。所謂的無刷直流馬達,是指直流馬達具備有刷直流 馬達簡易控制的優點,但不具有刷直流馬達換向器(commutator)所需的 碳刷(brush)機械式裝置,因此在控制器設計及馬達設計維護上均具有 極大之優勢,對於以往有刷直流馬達逐漸被交流馬達取代之際,近年 來均有被無刷直流馬達重新加以利用之情況。 無刷直流馬達簡易結構如圖 3-1(b)所示,其馬達中心為定子(stator), 而其外圍轉子(rotor)則是永磁物質,欲使轉子轉動必須要從外界的磁 場變化著手,此可利用定子繞組線圈以及輸入電流所造成外部電磁場 的改變。由電磁力作用原理(圖 3-2)得知,欲使馬達輸出轉矩達到最 大,則必須使馬達轉子產生之磁通量和輸入電流產生之電磁場保持垂 直的位置,但因無刷直流馬達之轉子(磁極)位置是會隨著時間週期 變化,為了保持轉子之順序轉動及獲得最大轉矩,一般的作法是藉由霍爾感測器(Hall sensor)(如圖 3-1(a)所示)來檢測永久磁鐵轉子之磁
極位置,然後將位置信號饋入驅動電路(圖 3-1(a)),以提供相對應之
輸入電流給馬達線圈,使其磁動勢和轉子磁極隨時保持垂直狀態,藉 由此控制方法使得馬達正常運轉。
24 (a) 驅動電路 (b) 馬達結構 圖 3-1 無刷直流馬達驅動電路及結構圖[11] 圖 3-2 弗來明左手定則[12] 無刷直流馬達最大的特徵是利用電子換向技術(作用視同交流馬 達),一般是利用變頻器取代傳統有刷直流馬達的換向器及碳刷等整流 機械結構,因此沒有電刷,因而無有刷直流馬達使用傳統電刷的缺點。
25 圖 3-3 有刷直流馬達和無刷直流馬達的靜態特性與動態特性比較[13] 兩者在馬達動態特性和靜態特性差異上,可簡述如下。有刷直流馬達 的轉矩與旋轉速度的關係,如同圖 3-3(a)所示成為直線,而無刷直流 馬達則如圖 3-3(b)所示,成為稍微凹入的曲線。另外,兩者在馬達啟動 特性(速度上升的情況)上,亦有些差異。如圖 3-3(c)和(d)所示,無刷直 流馬達的速度計算式,相較有刷直流馬達,稍微複雜些。一般而言,若 要正確的計算無刷直流馬達的速度,則需要考量馬達電路方程式與運 動方程式[13]。 最後,綜整上述討論,我們得知:就控制性能、穩定性及功率密度 (power density)而言,無刷直流馬達為一良好的動力驅動裝置。我們可 整理有刷直流馬達和無刷直流馬達的差異比較,如表 3-1 所示,並歸 納出無刷直流馬達的優點如表 3-2 所示。
26 表 3-1 有刷直流馬達與無刷直流馬達差異表 有刷直流馬達 無刷直流馬達 控制方面 簡單 稍複雜 環境溫度 不耐高溫 耐高溫 效率 低 高 換相器(碳刷) 需定時清理 無換相器 維護 需定期維護 免 馬達體積 大 小 重量 重 輕 壽命 低 高 馬達溫升 高 低 轉子銅損 稍大 小 扭力 小 大 噪音 大 小 驅動方式 以機械整流或換相 器(碳刷)來做換相動 作 以電子元件做換相 動作 火花 大 無
27 表 3-2 無刷直流馬達優點分析表[13] 項次 馬達形式 優點分析 免保養 DC 馬達 不需要電刷保養或是更換之麻煩。 小型 DC 馬達 因使用強力永久磁鐵,較感應馬達更小 型,與直流馬達比較,因無電刷更小型化。 形狀多樣化 DC 馬達 可配合內部轉子型、外部轉子型、偏平 型、無槽溝型、局部定子型、機械負荷型 等用途,因此,其設計自由度較高。 高效率低耗電 DC 馬達 較感應馬達之變頻器運轉效率為高,與直 流馬達比較,因無電刷效率更高。 低噪音 DC 馬達 無電刷噪音與電磁噪音。 控制之穩定性 DC 馬達 可顯示較類似特性之直流馬達可更穩定 動作。 表 3-3 與電磁力相關之物理量及其(SI)單位[13] 作用力 磁通密度 長度 電流 符號 F,ƒ B L,l I,i 單位/unit 牛頓 /N(Newton) 特斯拉 /T(tesla) 公尺 /m(meter) 安培 /A(ampere) 3.2.無刷直流馬達數學模型 誠如前一節所述,無刷直流馬達在控制器設計上等同有刷直流馬 達:馬達轉矩(torque)係比例於流過轉子線圈之電流與定子永久磁鐵所
28 產生磁通之乘積。令圖 3-2 中作用於導線之電磁力大小為 F、轉子磁場 (magnetic field)磁通密度為 B、導線長度 L 及流過導線之定子電樞 (armature)電流 i,則 F 可以下式表示[3]: F=BLi (1) 上述各物理量之單位如表 3-2 所示,其電磁力作用力之方向,則如圖 3-1 所示。由於馬達轉矩 T 為電磁力 F 與作用力距轉動中心之距離 r 之 乘積,且 T 不會因 r 值而改變,另外針對使用永久磁體之磁場系統而 言,其磁通亦幾乎不會改變,因此我們可將(1)式改寫為下面更方便的 表示式: 𝑇 = 𝐾𝑇𝑖 (2) 其中比例常數𝐾𝑇=𝐵𝐿𝑟稱為轉矩常數(torque constant)。 若電流 i 變大,電樞線圈所產生磁場將影響到磁通分佈,有時會實 質減少磁通之總量,此一現象稱為電樞反應(armature reaction)。經由外 力若將轉軸加以轉動,在其兩端子間會產生直流電壓,因此其旋轉角 速度ω 與電壓𝑣𝑒𝑚𝑓間,具有下式之比例關係: 𝑣𝑒𝑚𝑓 = 𝐾𝐸𝜔 (3)
上述電壓𝑣𝑒𝑚𝑓稱為反電動勢(back electromotive force),而𝐾𝐸則稱為反
電動勢常數(back-emf constant)。上述𝐾𝑇與𝐾𝐸之單位雖有差異,但在 SI 單位表示下,其數值卻相同,因此在控制器實現上我們可得下式[3]: 𝐾𝑇 = 𝐾𝐸 (4) 由於(2)式中的電流是由定子電樞電路所產生,其等效電路如圖 3-4 所示,因此電樞電流 i 可由下面電路方程式決定: 𝑉𝐷𝐶 = 𝐿𝑠𝑑𝑖𝑑𝑡+𝑅𝑠𝑖 + 𝑣𝑒𝑚𝑓 (5)
29 其中𝐿𝑠為電樞電路電感而𝑅𝑠為電樞電路電阻。另外,馬達轉矩-轉速 方程式則可由下面運動方程式決定: 𝑇 = 𝐽𝑚𝑑𝜔 𝑑𝑡 + 𝐵𝑚𝜔 + 𝑇𝐿 (6) 其中𝐽𝑚為馬達轉動慣量、𝐵𝑚為馬達遲滯摩擦係數而𝑇𝐿則為馬達負載力 矩。上面(5)-(6)式即稱為無刷直流馬達數學模型,其控制方塊圖如圖 3-5 所示。 圖 3-4 單相全橋變流器及電樞等效電路[11] 圖 3-5 無刷直流馬達控制方塊圖[11]
30
第四章 系統設計與實驗結果
4.1. LabVIEW 軟體設定
系統設計之初,必須先安裝完 NI MAX 和 Real-time Software 後, 再開啟 LabVIEW 主程式。首先,要開啟新的專案(New Project)如圖 4-1 所示,開啟專案(Create Project)後選擇運動控制類型 SoftMotion,再 選擇 Brushless Servo Drive (NI 9502) 如圖 4-2 所示,其次建立 Project Name 以及所需要儲存的檔案路徑,然後在 Project Type 之中選擇 Trapezoidal Commutaition(梯形換向模式),如圖 4-3 所示。在建立專 案完成後,接下來要進行硬體建立以及程式修改。
31
圖 4-2 開啟專案(Create Project)視窗_1
32
4.1.1.建立 Targets and Devices
首先在設計 LabVIEW Project 之前需要先建立階層觀念,在 Project 下 有 My Computer 以 及 RT CompactRIO Target , 另 外 在 RT CompactRIO Target 底下又有 Chassis,Chassis 底下又有 C series modules, 如果一開始沒有階層觀念會在此階段花費過多的時間,此時有了觀念 後就是繼續建立新的 Targets and Devices,如圖 4-4 所示。我們在 Project 處建立新的 RT CompactRIO Target,首先滑鼠右鍵開啟 New Targets and Devices,進入 Targets and Devices 以後,我們可以尋找現有的 Targets and Devices(就是選 Existing target or device),然後選擇現有 的設備種類,如 CompactRIO 或是 ComapctDAQ 等等之類的設備,如 圖 4-5 所示。然後,便會進入 Select Programming Mode(選擇編程模式) , 本論文選擇(Scan Interface)讓系統自動掃描現有的 Devices,如圖 4-6 所 示。系統在掃描後,會彈出 Discover C Series Modules 視窗,然後點選 Discover 即可,如圖 4-7 所示。然而,此時會發現找不到本論文所使用 的 C Series Modules(如圖 4-8 所示),接著就要細看錯誤描述,看完 以後便可繼續下一步,再來就是要修改程式了。
33
圖 4-4 建立新的 Targets and Devices
34
圖 4-6 Select Programming Mode
35
圖 4-8 Discovery Status
4.1.2.新增以及部署 FPGA
回到 LabVIEW WINDOWS,我們需要優先新增 FPGA 環境,如圖 4-9 所示。由於有階層概念,所以要在 Chassis 這層新增,此時 FPGA 會彈出詢問是否要增加部屬 FPGA 到你的 Chassis,如圖 4-10 所示。按 下 Deploy Now 以後,會開始執行部屬 FPGA 環境(圖 4-11),然後回 到 Project Windows(如圖 4-12)。設計程式之前,必須先把 Mod1 以 及 Clock 之類等必要檔案拖曳到你剛開啟的 New Chassis,拖曳完成後 如圖 4-13 所示。
36
37
圖 4-10 Deploy CompactRIO Chassis Settings
38
39
40 4.2. 無刷直流馬達定速控制之 LabVIEW 程式設計 在設計程式前,我們規劃了無刷直流馬達速度控制流程圖,如圖 4-14 所示。 圖 4-14 無刷直流馬達速度控制流程圖[1] 無刷直流馬達定速控制程式主要分成四個部分:(1) Status Loop, (2) Velocity Loop,(3) Current Loop 及(4) PWM Loop。Status Loop 程式 負責啟用和停止,清除故障,配置霍爾接線並讀取驅動器狀態(如圖 4-15 所示)。Velocity Loop 程式負責產生指定電流,傳送到無刷直流 馬達線圈並回授速度估測值(如圖 4-16 所示)。Current Loop 程式負 責產生及更新 PWM 訊號的佔空比(duty ratio),其為 PWM 方波的一個 周期內通道的百分比,用於創建 PWM 信號(如圖 4-17 所示)。PWM Loop 程式負責產生 PWM 信號並將信號寫入到 I/O 節點內(如圖 4-18
41
所示)。
圖 4-15 Status Loop
42
圖 4-17 Current Loop
43
4.3. 無刷直流馬達定速控制之 LabVIEW 人機介面設計
首先要開啟 SoftMotion 的 Host.vi 人機介面進行編譯(圖 4-19), 其重點要改 Host.vi 程式內 FPGA.vi 進行連結配置,因為原本 FPGA.vi 人機介面未配置現有的 CompactRIO 機箱上,所以我們要對 Host.vi 人 機介面進行修改(進行步驟如圖 4-20 所示),然後尋找 SoftMotion 的 FPGA.vi(圖 4-21)以後,選擇確認 SoftMotion 副程式 FPGA Traget 是 否如自己所設定一般(如圖 4-22 所示),修改完成後就可以進入編譯 程式,以便後續進行燒錄到 CompactRIO。在進入 FPGA.vi 人機介面 (如圖 4-23 所示)後,按下 LabVIEW 為使用者設計之編譯快捷建(圖 4-24),進行編譯時系統會彈出詢問視窗,詢問要使用哪種編譯方式(圖 4-25)。本研究使用 Local Server 直接進行編譯且會把程式生成文件(如 圖 4-26 所示),在生成文件後,系統會自動進行編譯動作,然後進行 程式燒錄,如圖 4-27 所示,此時燒錄程式到 NI CompactRIO 需要一段 時間,期間盡可能不要去觸碰任何按鈕導致燒錄出現異常錯誤。 本論文利用上面 Host.vi 人機介面設計工具,所產出的無刷直流馬 達定速控制實驗之人機介面如圖 4-28 所示(其設計參考 NI 所提供之 一個無刷直流馬達定速控制之範例程式)。
44
圖 4-19 Host.vi 程式
45
圖 4-21 Change FPGA Target
46
47
圖 4-24 RUN FPGA VI 人機介面
48
圖 4-26 Generating Intermediate Files
49 圖 4-28 Host.vi 人機介面(未設定參數) 4.4.馬達定速控制實驗 4.4.1.實驗參數設定 本論文所使用之馬達為 57BL52-230 無刷直流馬達(如圖 4-29 所 示),其系統規格為 24V、60W、3000 轉及編號為 57BL55S06-230TF9。 圖 4-29 本論文所使用之無刷直流馬達
50
在本研究中,我們設定馬達及實驗參數如下:
(1) Drive Parameters(驅動參數):
(a) Hall Wiring (霍爾接線):1 ,2 ,3 (b) Motor Inductance (馬達電感):2.1 (c) Motor Resistance(馬達電阻):1.15 (d) Bus Voltage(母線電壓):24V
(2) Move Parameters(移動參數):
(a) Cutoff Frequency(截止頻率):500 Hz
(b) Velocity(速度):5、10、20 Revolution/sec
(c) Velocity Gains (速度增益): Kp=0.01 𝐴
𝐶𝑜𝑢𝑛𝑡𝑠/𝑠,Ki=10 Hz
上述馬達及實驗參數設定如圖 4-30 及 4-31 所示。
51 圖 4-31 實驗設定參數 4.4.2.實驗結果 在完成上述所有馬達及實驗參數設定後,我們就可以開始調整圖 4-31 中之速度設定值來進行實驗測試。在本論文中,我們測試下面三 種不同速度設定值:5、10 及 20,其實測馬達轉速波形如圖 4-32~4-34 所示。依據這些實際所測得之馬達轉速波形,我們可確認本論文所 提出的 CompactRIO 系統設計及無刷直流馬達定速控制實驗符合預期 結果。
52
圖 4-32 實驗結果波形為 5 rps
圖 4-33 實驗結果波形為 10 rps
53
第五章 結論與未來研究方向
5.1.結論 CompactRIO 是一個具有功能強大控制器與豐富驅動電路的嵌入 式系統設計平台,只要將程式建立執行檔並使用相關支援的 C Series Module 模組,並佈署至 CompactRIO 即可獨立執行各種系統應用。另 外,LabVIEW 具有圖型化程式介面,可輕易設計程式流程,是快速開 發系統雛型的利器,未來將成為學術界及業界程式設計之標準。 本研究利用 CompactRIO9066 與 NI C Series Module 9502 硬體以 及 LabVIEW 軟體,成功地開發一個可實現無刷直流馬達定速控制之嵌 入式系統,實驗結果亦證明所設計結果確能滿足本論文之研究目的。 5.2.未來研究方向 由於時間及研究設備限制,本論文所研究之 CompactRIO 嵌入式 系統設計應用,僅限於無刷直流馬達定速控制之測試。未來論文研究 方向可朝向下面三點作延伸: (1) 可加入解碼器,進而達到無刷直流馬達定位控制之目的。 (2) 可考慮加入負載,以應用到更複雜之機器手臂或無人工廠控制應 用。 (3) 進一步優化 LabVIEW 程式設計。54 參考文獻 [1] NI 官方網站 http://www.ni.com/zh-tw.html [2] 林靜、林振宇、鄭福仁,LabVIEW 虛擬儀器程序設計從入門到精 通,北京,2013。 [3] 羅士堯,以 LabVIEW 圖控式軟體實現之雙連桿倒單擺系統甩上與 平衡控制,國立臺灣海洋大學機械與機電工程學系碩士論文,2008。 [4] 范銘峰,旋轉式倒單擺系統之非線性控制設計研究,大華科技大學 電機與電子工程系碩士班,2015。 [5] 何全淇,CompactRIO 嵌入式系統案例研究-兩輪直立式機器人,明 新科技大學精密機電工程學系碩士論文,2012。 [6] 郭閔文,安謀 Cortex M4 與 MIPS 架構之嵌入式系統級晶片佈署監 控系統,國立臺灣科技大學電子工程系碩士論文,2017。
[7] 劉宗旻,在 ARM Cortex-M3 嵌入式系統上之 μC/OS-III 省電機制, 國立中興大學資訊科學與工程學系,2018。
[8] 張俊韋,在 ARM Cortex-M3 嵌入式系統設計與實作應用於 µC/OS-III 的記憶體保護策略國立中興大學資訊科學與工程學系,2018。 [9] 唐偉倫,利用 Arduino 實現氧化鋅奈米柱酸鹼值感測器之無線感測 系統,國立虎尾科技大學電子工程系碩士班,2018。 [10] 吳志元,8051 微控制器設計泛用型遠端監視系統,國立中正大學 電機工程研究所,2000。 [11] 陳煒超,效率最佳化之單相無刷直流風扇馬達使用霍爾感測器或 無感測控制,國立交通大學電控工程研究所碩士論文,2009。 [12] https://zh.wikipedia.org/wiki/左手定則 [13] 孫清華,最新無刷直流馬達,全華圖書,台灣,2002。

![圖 2-3 CompactRIO-9066 控制器[1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7269883.69357/21.892.191.726.297.724/圖23CompactRIO966控制器1.webp)
![圖 2-6 NI C Series modules (NI9502)[1]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7269883.69357/24.892.245.632.130.490/圖-ni-c-series-modules-ni.webp)