大華科技大學
電機與電子工程系碩士班
碩士論文
智慧型導引系統應用於立體停
車塔之研究
Application Study of an ntelligent
Guiding System at Parking owers
研究生:邱冠智
指導教授:鍾金河
共同指導教授:温兆俊
智慧型導引系統應用於立體停車塔之研究
Application Study of an Intelligent Guiding
System at Parking Towers
研究生:邱冠智 Student:Kuan-chih Chiu 指導教授:鍾金河 Advisor:Chin –ho Chung 共同指導教授: Co-Advisor:Chao-chun Wen
大華科技大學
電機與電子工程系碩士班 碩士論文
A thesis
Submitted to the Department of Electrical and Electronic Engineering College of Engineering and Design
Ta Hwa University of Science and Technology in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Electrical and Electronic Engineering July 2018
I
摘要
論文應用 Arduino MEGA 2560 微控器並結合五顆超音波感測器與 兩組紅外線感測器,研究車輛被智慧導引進入停車塔車道時之可靠停 車系統。第一顆超音波感測器設置於進入車道前端上方,以測量車輛 高度,預防過高車型進入[1]。另外,其他四顆超音波感測器設置於 車道兩邊,以感測車輛所在位置。而兩組紅外線感測器設置於車道末 端,藉以偵測車輛是否已經到達定位。這些感測器(包括 5 顆超音波 感測器與 2 組紅外線感測器)訊號傳送給微控制器,以作為判斷車輛 在車道中所在位置的資訊,進而由微控制器送出訊號,於人性化界面 顯示指引標誌,以提供駕駛人是否允許進入車塔、車輛方向修正與停 車定位的導引功能。而人性化界面包含黃色 LED 箭頭矩陣、綠色 LED 「OK」字樣形狀和綠色/紅色 LED 禁止標誌。本研究之優點具有精 簡人力、減少車輛碰撞風險,且讓駕駛者感覺方便與安全。 關鍵字: Arduino MEGA 2560 微控器、超音波、紅外線、停車塔II
Abstract
This thesis has developed the intelligent system, which consists of the Arduino MEGA 2560 microcontroller linking with five sets of ultrasonic sensors and two infrared detectors, to guide vehicles to enter the lane available at a parking tower. The first ultrasonic sensor was placed above the front end of the lane to measure the height of the vehicle to prevent the vehicle from entering the parking space with an excessive height. The other four ultrasonic sensors were placed on both sides of the lane to sense the position of the vehicle. Two infrared sensors were placed at the end of the lane, which detected whether the vehicle has reached the position. These sensing signals (include five ultrasonic sensors and two infrared sensors) were transmitted to the microcontroller to determine the distance between the front of a vehicle and two infrared sensors. The microcontroller sends out the signal in the user-friendly interface, which provides the driver whether allows the access of the tower, the correct direction of a vehicle as well as the guide function of parking positioning. The user-friendly interface includes the yellow LED arrow matrix, the shape of green LED “OK” word as well as the green/red LED prohibition flag. This study has the advantages of streamline manpower, reduces the risk of vehicle collisions, and makes divers feel convenience and safety.
Keywords: Arduino MEGA 2560 microcontroller ,ultrasonic sensor , infrared sensor,parking tower
III
目錄
摘要
... I
A
BSTRACT... II
目錄
... III
圖目錄
... VI
表目錄
... IX
第一章
緒論 ... 1
1-1
前言
... 1
1-2
研究動機
... 1
1-3
論文架構
... 2
第二章
基本理論 ... 3
2-1
超音波原理介紹
... 3
2-2
超音波振動子工作方式
... 4
2-3
超音波感測器應用類型
... 5
2-4
紅外線使用範圍與種類
... 7
2-5
紅外線測距方式
-三角測量法:
... 8
IV
第三章
系統硬體架構
... 9
3-1
停車塔入口測量硬體架構
... 9
3-2
Arduino Mega
2560
微控器介紹
... 10
3-3
Arduino Mega 2560
微處理器開發版環境說明
... 12
3-4
Arduino 供電方式說明
... 13
3-5
超音波距離感測器
... 13
3-6 紅外線距離感測器
... 16
3-7
紅外線距離測試
... 18
3-8 人性化介面介紹
... 21
3-9 溫度感測器 LM35
... 29
第四章 入庫停車硬軟架構
... 30
4-1
軟體架構
... 30
第五章 實驗結果與討論
... 32
5-1 超音波感測器電路分析
... 32
5-2 超音波散角
... 36
5-3 材質、顏色對紅外線類與超音波量測影響
... 42
5-4
紅外線趨勢線對照
... 55
V
5-5 超音波溫度影響
... 60
5-6 紙箱模擬進入停車塔
... 66
第 6 章 結論與未來展望
... 72
6-1 結論
... 72
6-2 未來的展望
... 72
參考文獻
... 73
VI
圖目錄
圖 2.3.1 單頭發散型 ... 5 圖 2.3.2 單頭反射型 ... 5 圖 2.3.3 雙頭對射型 ... 6 圖 2.3.4 雙頭反射型 ... 6 圖 2.4.1 光波長之紅外線波 ... 8 圖 2.5.1 紅外線量測概念 ... 8 圖 3.1.1 系統硬體架構圖 ... 9 圖 3.2.1 Arduio Mega 2560 ... 10 圖 3.3.1 Arduino IDE 介面 ... 12 圖 3.5.1 超音波感測方式 ... 14 圖 3.5.2 超音波距離感測器(正面) ... 14 圖 3.5. 3 超音波距離感測器(背面) ... 14 圖 3.5.4 SH-04 超音波模組測距時序圖 ... 15 圖 3.6.1 紅外線感測器GP2Y0A60SZLF (正面、背面) ... 16 圖 3.6.2 GP2Y0A60SZLF 電路圖 ... 17 圖 3.6.3 GP2Y0A60SZLF 時序圖 ... 17 圖 3.6.4 紅外線感測器 GP2Y0A60SZLF 動作示意圖 ... 17 圖 3.7.1 紅外線感測器類比電壓曲線圖 ... 19 圖 3.7.2 六顆紅外線感測器測曲線圖 ... 20 圖 3.8.1 OK 字型 LED ... 21 圖 3.8.2 LED 箭頭向右指示形狀... 22 圖 3.8.3 LED 箭頭左指示形狀 ... 22 圖 3.8.4 LED 圈跟禁止形狀 ... 23 圖 3.8.5 TIP41C ... 24 圖 3.8.6 TIP41C 腳位圖 ... 24 圖 3.8.7 LED 電流放大電路 ... 24 圖 3.8.8 BJT 電流放大驅動 LED ... 24 圖 3.8.9 雙色 LED 驅動電路 ... 25 圖 3.9.1 LM35 接腳圖 ... 29 圖 3.9.2 LM35 實體零件 ... 29 圖 4.1.1 系統初始化 ... 30 圖 4.1 2 LOOP 迴圈流程圖 ... 31 圖 5.1.1 HC-RS04 模組電路圖 ... 32 圖 5.1.2 單電源反相放大器 ... 33VII 圖 5.1.3 單電源帶通濾波器 ... 34 圖 5.1. 4 單電源非反相比較器 ... 35 圖 5.1. 5 超音波發射驅動電路 ... 35 圖 5.1. 6 超音波感測器量測平均誤差 ... 36 圖 5.2. 1 三角形計算斜邊與θ角示意圖 ... 37 圖 5.2. 2 超音波觀察左右散角距離圖 ... 39 圖 5.2. 3 超音波觀察左右散角距離圖 ... 40 圖 5.2. 4 超音波觀察左右散角距離圖 ... 41 圖 5.3.1 超音波與紅外線焊接於通用板上 ... 42 圖 5.3.2 灰色鋁板類比電壓變化圖 ... 44 圖 5.3.3 灰色鋁板超音波感測距離變化圖 ... 44 圖 5.3.4 壓克力板紅外線類比電壓變化圖 ... 45 圖 5.3.5 壓克力板距離超音波感測距離變化圖 ... 46 圖 5.3.6 牛皮紙紅外線類比電壓變化圖 ... 47 圖 5.3.7 牛皮紙超音波感測距離變化圖 ... 48 圖 5.3.8 黑色塑膠膜紅外線感測類比電壓變化圖 ... 49 圖 5.3.9 黑色塑膠膜超音波感測距離變化圖 ... 50 圖 5.3.10 海綿紅外線感測類比電壓輸出變化圖 ... 52 圖 5.3.11 海綿超音波感測距離變化圖 ... 52 圖 5.3.12 綜合紅外線感測類比電壓曲線 ... 53 圖 5.3.13 綜合超音波感測距離曲線圖 ... 54 圖 5.4.1 Prism 6 軟體畫面 ... 55 圖 5.4.2 Prism6 計算結果曲線圖... 55 圖 5.4. 3 紅外線 1 號 Prism 6 計算結果 ... 57 圖 5.4. 4 紅外線 1 號 Prism 6 曲線圖 ... 57 圖 5.4. 5 紅外線 1 Excel 乘幂與多項式與乘幂 ... 58 圖 5.4. 6 紅外線 2 號 Prism 6 計算結果 ... 59 圖 5.4. 7 紅外線 2 號 Prism 6 曲線圖 ... 59 圖 5.4. 8 紅外線 2 號 Excel 乘幂與多項式與乘幂 ... 60 圖 5.5.1 36℃超音波誤差曲線圖 ... 62 圖 5.5.2 30℃超音波誤差曲線圖 ... 63 圖 5.5.3 25℃超音波誤差曲線圖 ... 64 圖 5.5.4 三種溫度超音波比較 ... 64 圖 5.5.5 36 度修正超音波誤差 ... 65 圖 5.6. 1 模擬車像紙箱 ... 66 圖 5.6. 2 車道示意圖 ... 66
VIII
圖 5.6.3 紅色 LED 顯示車身太高禁止進入………..67
圖 5.6.4 綠色 LED 顯示車身高度較低允許進入 ... 67
圖 5.6. 5 車輛偏右進入動作圖 ... 69
IX
表目錄
表 2.1.1 聲波在各材料介質速度... 3 表 3.1.1 Arduino Mega 2560 微處理器硬體規格表 ... 11 表 3.5.1 HC-SR04 硬體規格表 ... 15 表 3.6.1 紅外線感測器規格表 ... 18 表 3.7.1 紅外線感測器類比電壓與類比轉換數值 ... 19 表 3.7.2 六顆紅外線感測器 ... 20 表 5.1.1 超音波感測器量測表 ... 36 表 5.2.1 散角產生位置 ... 38 表 5.3.1 灰色鋁板紅外線感測類比電壓輸出測量表 ... 43 表 5.3.2 灰色鋁板超音波感測距離測量表 ... 43 表 5.3.3 壓克力板紅外線感測類比電壓輸出測量表 ... 45 表 5.3.4 壓克力板超音波感測距離測量表 ... 45 表 5.3.5 牛皮紙紅外線感測類比電壓輸出測量表 ... 46 表 5.3.6 牛皮紙超音波感測距離測量表 ... 47 表 5.3.7 黑色塑膠膜紅外線感測類比電壓輸出測量表 ... 49 表 5.3.8 黑色塑膠膜超音波感測距離測量表 ... 49 表 5.3.9 海綿紅外線感測類比電壓輸出表 ... 51 表 5.3.10 海綿超音波感測距離表 ... 51 表 5.3.11 綜合比較紅外線感測類比電壓測量表... 53 表 5.3.12 綜合比較超音波感測距離測量表 ... 54 表 5.4.1 紅外線 1 號 Execl 驗算觀察表 ... 56 表 5.4.2 紅外線 2 號驗算觀察表... 58 表 5.5.1 超音波在 36 度℃距離量測表 ... 61 表 5.5.2 超音波在 30 度℃距離量測表 ... 62 表 5.5.3 超音波在 25 度℃距離量測表 ... 63 表 5.5.4 超音波 36℃修正 ... 65 表 5.6. 1 偏右進入車塔數值紀錄... 68 表 5.6. 2 偏左進入車塔數值紀錄... 701
第一章
緒論 1-1 前言 動物界的聲音頻率有高有低,而動物常會用聲音溝通或警告以防同伴 與共生動物被捕殺。人可聽到的聲音頻率介於 6HZ~20KHZ(赫茲)之間,高 出 20KHZ 人耳也無法聽見,科學家稱之為:超音波。[2] 聲波是動物界一種傳遞訊息跟定位的方式,例如:海豚在水中使用聲 納來收尋同胞或獵物,偵測身邊的危險。在陸地上中也有使用聲波捕殺獵 物以及方位判定,最常見就是蝙蝠,牠使用超音波做到最佳的回聲定位 (echolocation)功能[3]。這種能力可以讓蝙蝠定位清楚獵物的距離、大小 跟形狀,判斷障礙物和自己相對位置。 常用的超音波感測器有兩種,一種"雙頭反射型"、另一種"單一接收"。 超音波在生活與科技運用頗為廣泛,例如:醫學、服務機器人、倒車雷達、 安全主動式煞車(FCM)、補貨自走車、身高測量器等等。 1-2 研究動機 現代講求自動化取代更多人力,也同時提供多元化的服務兼顧交通安 全的考量。在都市車位需求量大,而且沒有收費員指揮情況中,如何引導 駕駛人進入停車塔的車道有其必要性。 近年來大家都把汽車當作代步工具,汽車需求快速成長造成市區內的 停車空間不足,為了解決停車位不足的問題,將平面停車場改成立體停車 塔,以大幅增加停車位的容量,如此給使用者有一個很好停車環境,也改 善車輛在路邊停車的亂象發生。例如:紅線停車,並排停車等等。 因而本研究使用 Arduino 微控器結合超音波感測器與紅外線感測器判 斷車身位置,告知駕駛如何修正車輛偏移,進而順利進入停車塔。2 1-3 論文架構 本研究共分為六個章節如下: 第一章: 緒論、研究動機與論文架構。 第二章: 基本理論:認識超音波感測器與紅外線感測器基礎原理與應用。 第三章: 硬體說明:Arduino Mega 2560 微控器、HC-SR04 超音波感測器、 夏普紅外線感測器、LM35(溫度感測器)、LED 驅動套件以上所以用到的硬 體元件,描述工作。 第四章: 軟體架構說明。 第五章: 超音波與紅外線材料實驗和入庫程序討論。 第六章: 最後以實驗結果做出結論與未來展望。
3
第二章 基本理論
2-1 超音波原理介紹 人們耳朵聽不到超過 20KHZ 以上聲波稱之為超音波[2,4,5],在超音波 中會被一般人認為是不是超音速,但其實不既然。超音速是移動的物體速 度突破足以超越聲波速度。超音波在任何的工作頻率之中,其中傳波速度 都會是音速。 聲音可從其他材質當中做為傳播聲音方式,在不同的聲波介質下傳播 速度快慢有所不同,例如空氣在聲波如表(2.1.1)所示,傳播速度 340m/sec 而且是在環境溫度為 15℃,當溫度上升時傳播速度就會提高多,隨著環境 溫度為 20℃,利用公式(2.1.1)得到聲波速度為 343m/sec。聲波在固體> 液體>氣體,得知聲波在這些介質中傳播速度快慢[2,3,5,6,7,8]。 聲波速度=331 + 0.6 ∗ T (公尺/秒) (公式 2.1.1) 表 2.1.1 聲波在各材料介質速度[2] 20℃觀測值 聲波在各材料介質的速度 材料 固體>液體>氣體 傳波速度 m/sec(公尺/秒) 鋼 5200 鋁 5000 黃銅 3500 鉛 1190 石英 6000 水 1500 空氣 343 空氣 15℃ 3404 2-2 超音波振動子工作方式 超音波在產生音波是擁有兩種方式,電振盪型和磁伸縮方式發生,下 面兩種說明。 2-2-1 磁伸縮振盪器[9] 使用鐵酸鹽振盪器,在鐵酸鹽本身非導體,因此對高頻電流所產生的 磁場,比較降低行程渦電流的情形,可以使得能量轉換的效率大幅度提升, 在工業用途上經常被拿來做(如洗淨機、工具機中)等產品,而輸出的能量 為6W/cm2 左右,工作頻率範圍在28KHz 至100KHz 左右。使用化材方面而 利用矽(Si)、(鈷)Co、(鈣)Ca、(鎳)Ni、(鐵)Fe 等這金屬氧化物的混合粉 末,利用加熱並加高壓壓縮成型,再將線圈纏繞在材料上,當電流流過線 圈時,化學材料本身受到磁場變化而產生出共振效應形成超音波,而產生 共振方向是與磁場垂直[2,5]。 2-2-2 電振盪器 有壓電特性的材料有出現壓電效應,可有正壓電效應跟逆壓電效應, 這兩種方式會讓壓電材料的內部晶格產生原子特殊的排列,改變材料本身 的身形,來產生超音波所需的音波振動。一般的壓電材料中,微處理器常 用到的震盪器單晶類的石英,還有陶瓷類的鈦酸鋇(PZT)、薄膜類型的氧 化鋅(ZnO)、電氣石、水晶…等等材料,是能電氣能轉換成動能的材料 [5,10]。
5 2-3 超音波感測器應用類型 超音波感測中有 4 種在市面常見的應用組合,單頭發散、單頭反射、 雙頭對射、雙頭反射型以下作說明。 2-3-1 單頭散射型 頻率設置 20KHz 以上的聲波發射置於空氣中,常應用如:超音波驅鼠器、 超音波驅蟲。若應用於大功率超音波設備,常用在洗碗機、超音波焊機器, 如下(圖 2.3.1)[4,11]。 圖 2.3.1 單頭發散型[4,11] 2-3-2 單頭反射型: 單頭反射也稱收發同體主要是利用單個脈波形換能器[12](Ultrasonic Transducer),用脈波驅動轉換儀使發射超音波脈波,當脈波發射停止轉換 器將會轉為接收器,藉此回收打在障礙物上所折返回來的音波計算距離 [4.11]。如下圖(2.3.2)。 圖 2.3.2 單頭反射型[4,11]
6 2-3-2 雙頭對射型: 超音波感測器發射端(TX)跟接收端(RX)[13]以面對面設置,其障礙 物放在兩者接收跟發射中間,如果有障礙物在兩者之間,接收器回收訊 號就會有所變動,且此障礙物產生微量音波繞射給發射端,穿透障礙物 傳於接收器,如果障礙物沒有通過感測器時,接收端會收到很大音波信 號,使用在自動產線上計數、非破壞性檢測器、影印等等應用[4,11,14] 如下(圖 2.3.3)。 圖 2.3.3 雙頭對射型[4,11,14] 2-3-4 雙頭反射型: 本文使用此類型超音波感測器,發射端(Trig)跟接收端(Echo)設置 在同一邊,發射端發出 40KHZ 音波到障礙物中,當音波反回由接收端 回收並計時超音波感測器與障礙物的時間[4,11],來轉換成距離如下 (圖 2.3.4)。常被拿來做倒車雷達、防碰車雷達、自走機器人、自走車。 圖 2.3.4 雙頭反射型[4,11]
7 2-4 紅外線使用範圍與種類 紅外線不是肉眼可所見,在生物跟科技中被廣泛使用,透過電磁波光 譜(如圖 2.4.1)可以分為:遠紅外線、中紅外、近紅外線[15]三種以下做為 基本說明。 一. 近紅外線: 波長較短,波長範圍為 0.75μm-1.5μm 且能量較高,如電暖扇等 等具有加熱體所產生紅外線。大多定義為近紅外線,所以長期暴露在 近紅外線其中,容易造成皮膚灼傷且容易對眼睛造成傷害(白內障), 目前應用都是軍事雷達、熱向飛彈、追蹤、偵測(查),加工食品質譜 偵測上[15]。 二. 中紅外線 : 波長就介於近跟遠紅外線的能量範圍,中紅外線波長範圍為 1.5 μm-4.0μm,經常使用於偵測系統。如軍用光纖中紅外線瞄準器、雷 射輔助器、煙霧偵測、日夜錄影機、還有一些特殊用途的紅外線感測 器跟數位影像[15]。 三. 遠紅外線: 遠紅外線有生命之光的稱呼,因於本生波長在 4μm-1000μm 之內, 其研究人員發現實際範圍是 6μm-14μm 是,動植物在生活不可缺少的 波長,因此在中西醫裡常常以遠紅外線燈,讓傷者可以有舒筋活血的 功效[15]。
8 圖 2.4.1 光波長之紅外線波[16] 2-5 紅外線測距方式 -三角測量法: 紅外線因價格便宜及模組化,一般都使用在測量,測量的方法大多採 用三角測量法如圖(2.5.1),作為感測器應用。三角量測法,是利用紅外光 發射出去至反射物上,再經由反射回到接收端中(Charge-coupled Device) 感光元件稱為 CCD,會得到一個偏移的數值 L 值,再經由微控器計算出來 紅外線跟反射物之間的距離 D[17]。 圖 2.5.1 紅外線量測概念[17]
9
第三章 系統硬體架構
3-1 停車塔入口測量硬體架構 本文使用Arduino Mega 2560作為處理核心,如圖(3.1.1)所示,使用 兩顆紅外線感測器跟五顆超音波感測器,做距離測量。車輛高度經由安裝 上方的超音波感測器進行高度範圍檢查,然後由四個擺放不同位置擺設的 超音波感測器,而這些感測器測量距離會因為溫度而產生誤差,而LM35感 測環境溫度將資料送至微控器做溫度補償修正。微控器根據感測器測距數 據加以判斷,發出向左或向右的訊號到驅動電路,再送到LED標誌顯示,提 供駕駛車輛位置的修正。當車輛移動接近末端時紅外線感測器告知微控器, 微控器產生訊號給綠色LED,提示駕駛已達煞車定位點。 圖 3.1.1 系統硬體架構圖10 3-2 Arduino Mega 2560 微控器介紹
Arduio Mega 2560[18] 使用 Atmel 公司生產的 ATmega 2560 中央微 處理器,其它有 ATmege 1280/2560 這些微控器只區別快閃記憶體中容量, 依開發者在微控器上的需求上可以選購。本文使用 Mega 2560 中可利用角 位有 54 的數位 I/O 腳位供應給開發者大量數位接腳空間,其中另有 15 支 接腳提供了脈衝寬度調變(PWM)(Pulse Width Modulation)的應用區塊。以 即 16 支類比輸入腳接使用,USB(電腦連接)、變壓器供電、ARFE(參考電壓) 接腳、4 組 UART(RX、TX)、I2C 功能、16MHZ 時脈、提供 REST 按鍵。如下(圖 3.2.1)[2],其規格表,如表(3.1.1)。
11 表 3.1.1 Arduino Mega 2560 微處理器硬體規格表[2] 微處理器 ATmega2560 工作電壓 5V 輸入電壓 7V-12V 數位輸入接腳 54 支(其中 15 支接腳支援 PWM) 類比輸入接腳 16 支接腳 I/O 接腳電流 20mA 3.3V 接腳電流 50mA 快閃記憶體(Flash Memory) 256KB 靜態隨機存取記憶體(SRAM) 8KB 電子複寫唯讀記憶體(EEPROM) 4KB 時脈速度 16MHz 長(L)寬(W)大小 10.2CM(L) * 5.3CM(W) 供電方式 乾電池(DC)、AC-DC、USB
12 3-3 Arduino Mega 2560 微處理器開發版環境說明 圖(3.3.1)裡,紅框 1 中,是 Arduino IDE 主要分成,編譯、燒入、新 增、開啟、儲存,另有序列埠監視器提供開發者程式運作結果觀看。紅框 2 中,給予開發者編寫程式的空間,方便開發者在使用上不須其他編輯程 式支援。紅框 3 訊息攔,你在 Ardunio 中訊息提示開發者,目前所使用的 開發板是否在組譯、燒入成功,且還有目前內部記憶體使用狀況。如果編 譯狀態時紅字出現提示開發者語法有錯誤,需要做修正再重新編譯看結果。 [2.6.7] 圖 3.3.1 Arduino IDE 介面[2.6.7]
13 3-4 Arduino 供電方式說明
目前常見 3 種方式電壓輸入方式提供給開發者,有寬裕的電源選擇如: 與電腦連接(USB)、AC-DC(變壓器)、電池(DC),目前提到 3 種方式供電方 式。其中 AC-DC 跟電池(DC),因 Arduio Mega 2560 使用是 AMS1117 元件如 同熟知的 LM7805 的穩壓 IC 功能,所以當使用 AC-DC 電壓時變壓器必須超 過 6.5V 以上的電壓以及 6V~9V 乾電池,才可供應整個 Arduio Mega 2560 工作電壓,官方提到最高電壓限制在 12V,這也表示開發者如果在超過 12V 外部供電運作,請優先降壓到 12V 以內,以免造成 Arduio Mega 2560 的開 發板 AMS1117 穩壓 IC 燒毀且連帶燒毀 ATmega 2560 微處理器。 3-5 超音波距離感測器 本文所使用 HC-SR04[19]超音波感測器是屬於非破壞性的雙頭反射型 (脈波反射行)[2] 如(3.5.1)公式中我們得知了,音波在空氣傳播會因為溫 度影響[3],再由(3.5.1)公式中得到超音波感測器得到△ 𝑡超音波反射時間, 訊號傳給 Arduino 開發 IDE 撰寫計算程式,換算出 SR-04 跟反射物之間的 距離。 超音波模組測距時序圖(3.5.4)中,超音波感測器先接收到 Arduino 發出 10µs TTL 信號觸發內部模組,發射出 8 個 40KHZ 的脈波,發射到障礙 物上當反射回來的音波,讓接收端回收音波經過內部模組計時,在由 Arduino 計算(3.5.2)公式計算出超音波感測器跟反射物之間的距離。當需 要精確量測距離,把發射端(Trig)與接收端(Echo)之間的 d 距離產生的θ 角列入公式進行計算如公式(3.5.3),θ角會隨著超音波發射與接收之間距 離改變跟反射物距離,會改變θ角的大小[6]。當 D 距離很小狀況下會讓發 射端的音波提早被接收或長時間接收就會導致距離計算誤差。
14 圖 3.5.2 超音波距離感測器(正面) 圖 3.5.3 超音波距離感測器(背面) 圖 3.5.1 超音波感測方式[6] 而聲波會因為溫度的影響而產生誤差,計算方式如下: ν = 音速 (公尺/秒) Tmp = 環境溫度 (度℃) D = 距離 (公分) cosθ= 入射角 (度°) △ 𝑡 = 超音波反射 (微秒) ν = 331.31+
�1 +
𝑇𝑚𝑚 273.15 (公尺/秒)(3.5.1) D = △t ∗ ν 2 (公分)
(3.5.2) D= △t ∗ ν ∗cosθ 2 (公分) (3.5.3)
15 表 3.5.1 HC-SR04 硬體規格表[2.6] 工作電壓 直流 DC-5V(伏特) 工作電壓 15mA(毫安培) 工作頻率 40HZ(赫茲) 量測最大範圍 4M(公尺) 量測最小範圍 2CM(公分) 测量角度 15°(度) Trigger 輸入信號 10μS TTL 信號(微秒) Echo 輸出信號 回傳時間μS(微秒) 圖 3.5.4 SH-04 超音波模組測距時序圖[6]
16 3-6 紅外線距離感測器
本研究使用夏普(SHARP)生產紅外線感測器[20]GP2Y0A60SZLF,圖
(3.6.1)使用範圍是 10~150CM 的量測範圍,採用三角測量方式硬體中 PSD (Position Sensitive Detector)位置敏感測器[21]圖(3.6.4),來處理經由反射回 來紅外線訊號進而轉換類比電壓圖(3.6.2),而訊號回傳微控器處理計算量 測距離。另外紅外線感測器它具有兩種工作電壓可以做選擇,3V(伏特)與 5V。當想使用 3V 做測量就在電路中的 R6 電阻,解焊 R6 電阻,若不需要 就保持,其兩者改變工作電壓也不會改變量測距離範圍,只是提供使用者 的彈性使用電壓選擇。紅外線感測器,在反射物是黑色物體時會產生誤差 多,且反射物本身具有透光性質材料也會產生誤差。
圖 3.6.1 紅外線感測器GP2Y0A60SZLF (正面、背面)
17
圖 3.6.2 GP2Y0A60SZLF 電路圖[21]
圖 3.6.3 GP2Y0A60SZLF 時序圖[21]
圖 3.6.4 紅外線感測器 GP2Y0A60SZLF 動作示意圖[22]
18 表 3.6.1 紅外線感測器規格表[23] 工作電壓 5.5V或3.6V(伏特) 工作電流 33mA (毫安培) 量測範圍 10-150CM (公分) 輸出電壓 5V版本:3V (伏特) 3V版本:1.6V(伏特) 更新時間 16.5±4ms (毫秒) 3-7 紅外線距離測試 夏普紅外線距離感測器,採用三角測量做測距方式,將紅外線波長發 射出去接觸到反射物產生折射,返回到線感測器接收端,交由 PSD 位置感 應器偵測紅外線感測器和反射物之間距離,再利用內部微控器模擬出類比 電壓做輸出。 類比電壓轉換值如表(3.7.1)所示,將紅外線距離感測器量測結果,利 用 Arduino 監視介面得出。由 Arduino 微控器接收得出類比電壓,做 (ADC)(Analog-to-Digital Converter)10 位元轉換。(210 = 1024
,
0~1023)數 值範圍,得到表中 10 公分處為 705 數值。轉換公式ADC = 類比電壓 5 ∗ 1024 = 705 5 ∗ 1024 = 3.326(V)如圖(3.7.1)。19
表 3.7.1 紅外線感測器類比電壓與類比轉換數值
20 本文將利用六顆紅外線感測器做線性,將結果重疊同種類型都是夏普 所開發感測器,但卻有不同的數值上變化如表(3.7.2)所示,將紅外感測器 6 個編號為 1-6 號。測量 10 公分處各感測器分別,1 號 809、2 號 788、3 號 705、4 號 650、5 號 680、6 號 635…等這些數值,都有各自變化。如圖 (3.7.2)全部紅外線感測器量測曲線圖,量測距離有個自數值(ADC)。 表 3.7.2 六顆紅外線感測器 圖 3.7.2 六顆紅外線感測器測曲線圖
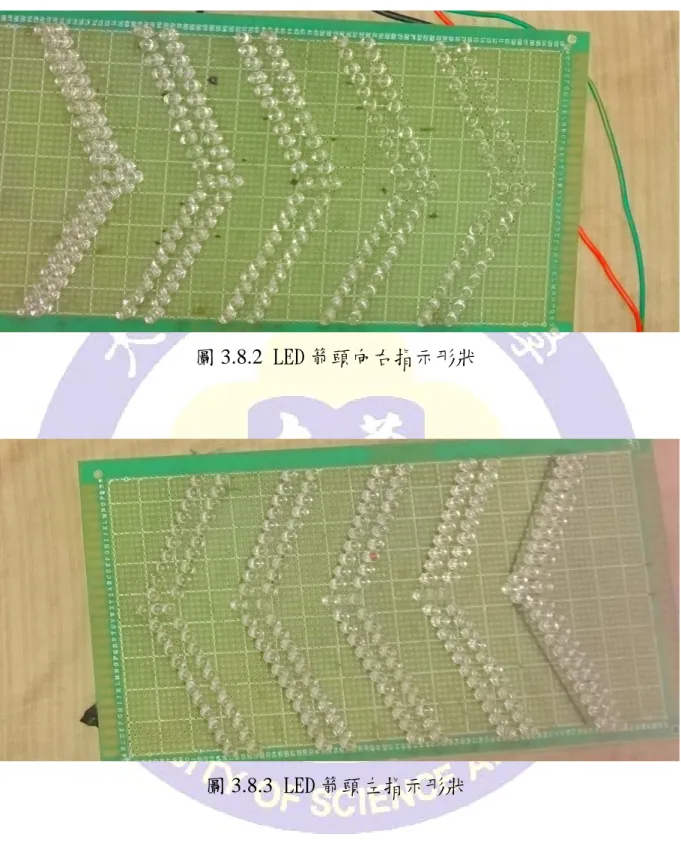
21 3-8 人性化介面介紹 本研究在車輛進入塔內車道時,利用人機介面提示駕駛者可以清楚了 解車道與車輛兩側間距,當車輛過高就會以紅色 LED 禁止進入標誌顯示, 而綠燈 LED 顯示則表示准許進入如下圖(3.8.4)。進入車塔途中如有偏移 LED 就是提示目前駛入車輛,需要向左/右偏方式修正路線如下圖(3.8.2)、 (3.8.3),這時 LED 黃色顯示箭頭方向,提示駕駛需要往反方向做修正。車 輛到末端需要停止由綠色 LED「OK」字樣顯示如下圖(3.8.1),提示駕駛可 熄火,這些 LED 標誌。 圖 3.8.1 OK 字型 LED
22
圖 3.8.2 LED 箭頭向右指示形狀
23
圖 3.8.4 LED 圈跟禁止形狀
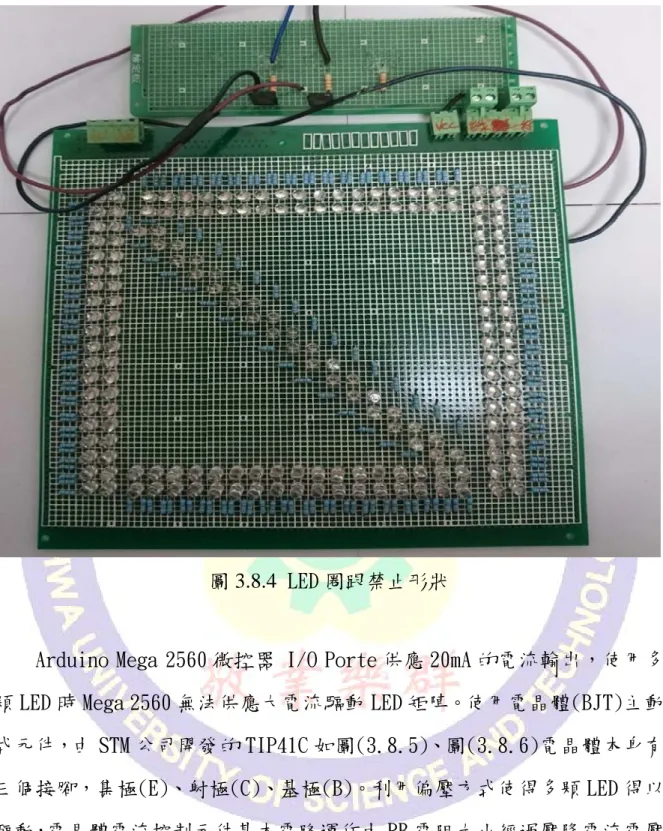
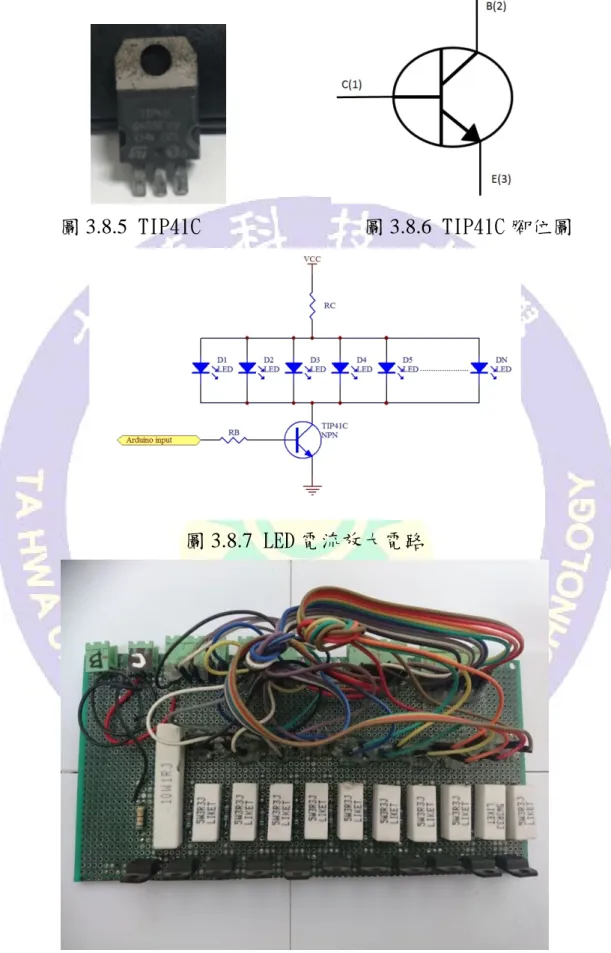
Arduino Mega 2560 微控器 I/O Porte 供應 20mA 的電流輸出,使用多 顆 LED 時 Mega 2560 無法供應大電流驅動 LED 矩陣。使用電晶體(BJT)主動 式元件,由 STM 公司開發的 TIP41C 如圖(3.8.5)、圖(3.8.6)電晶體本身有 三個接腳,集極(E)、射極(C)、基極(B)。利用偏壓方式使得多顆 LED 得以 驅動,電晶體電流控制元件基本電路運作由 RB 電阻大小經過壓降電流電壓 流入 BJT 基極(B)就有如水流開關的大小決定射極(C)電流大小[7]。把 TIP41C 焊接到萬用板上圖,並且在計算RB 、RC的電阻值如圖(3.8.7), 讓在電流放大提供多顆 LED 電流需求上,如圖(3.8.8)、(3.8.9)。
24
圖 3.8.5 TIP41C 圖 3.8.6 TIP41C 腳位圖
圖 3.8.7 LED 電流放大電路
25 圖 3.8.9 雙色 LED 驅動電路 計算偏壓I𝐶跟IB之間的比值,稱為:電流增益[7],如下公式(3.8.1), 依照公式計算 1 個左右箭頭,OK 字樣、禁止標誌、可通行標誌,所需要的 偏壓電阻公式(3.8.2)、(3.8.3),計算出I𝐶I𝐵電流需求電阻值。
h
FE=
IC IB公式(3.8.1)
R
C=
5V 工作電壓I C(歐姆/Ω)
公式(3.8.2)P
RC=
5𝑉−2𝑉I c(瓦特/W)
公式(3.8.3)26
已知 LED 指示箭頭矩陣每一組共有 47 顆 LED 所組成,則 1 顆 LED 需要 20mA。一組箭頭需要 0.94A 的電流,則消耗功率=電壓*電流,所以計算得 到一組 LED 箭頭 2.82W 實做時,取接近一倍的功率,5(W)額定功率的電阻 器。 得出 0.94A 一組箭頭的 LED 需求,接下來計算RC電阻得到結果為 3.19 Ω/5.64W(瓦特),RB電阻透過取得箭頭總電流量在除上hFE=40,計算出驅 動一組 LED 為 212.76Ω電阻,為了確保電晶體在工作區達到完全導通必免 造成飽和狀態,所以將計算結果取一半來增加電流值,RB電阻取 106.5Ω, 依照這定理將應用於其他 LED 矩陣上[7]。
LED 總電流量 = 20mA ∗ 47 = 940mA
PRC = 940mA ∗ 3V = 2.82W,取一倍 5W
RC = 5𝑉 − 2𝑉940𝑚𝑚 = 0.94𝑚 = 3.1914𝛺3𝑉
𝐼𝐵 = 0.9440 = 0.235𝑚
RB = 0.0235𝐴5𝑉 = 212.76Ω 取一半為 106.5Ω
27
此設計採用 BJT 電流放大偏壓方式,總數量 178 顆 LED 總共有約 3.6A, LED 所以 10.8W 功率取一倍,RC電阻約 1Ω/22W(瓦特),之後RB電阻需求 總IC去除 5V(伏特),得到RB=28.5Ω電阻值。
LED 總電流量 = 20mA ∗ 178 = 3560mA ≒ 3.6A
PRC = 3.6A ∗ 3V = 10.8W,取一倍 20W RC = 5𝑉 − 2𝑉3.6𝑚 = 3.6𝑚 = 0.8333𝛺3𝑉 IB = 3.6𝑚40 = 0.09A RB =0.09𝐴5𝑉 = 55Ω,取一半為 28.5Ω 禁止/通行標誌 LED 使用紅、綠色 LED 圍繞在 4 邊,再把設單一紅色 LED 作為禁止的斜線。綠色跟紅色 LED 分別 148 顆(綠色)、180 顆(紅色), 綠色 LED 共 2.96A 紅色共 3.6A 接下來就是計算出RB所需電阻,這次RC電 阻的綠色、紅色 LED 使用 124Ω電阻。
28
LED 總電流量 = 20mA ∗ 148 = 2960mA ≒ 3A
RB = 5𝑉3𝐴 = 1.666𝛺 ≒ 1.7𝛺,取一半為 0.833𝛺
PRB = 5V ∗ 0.8333 = 4.1W 此計算為綠色 LED 計算所需的RB電阻:
LED 總電流量 = 20mA ∗ 180 = 3600mA = 3.6A
RB = 3.6𝐴5𝑉 = 1.388𝛺 ≒ 1.4𝛺,取一半為 0.7𝛺
29 3-9 溫度感測器 LM35
LM35 由電壓變化型,外部電壓 4V(伏特)到 24V,溫度變化特性為每 10mV/℃,電力消耗只有 60μA[4],廣泛應用在電子灑水系統、高溫工作 機台、以及汽(機車)內應用實體零件圖(3.9.2)。因超音波感測在溫度的影 響相當敏感,而進行環境溫度測量,竟而補償超音波在距離上的誤差。圖 (3.9.1)LM35 腳位。 圖 3.9.1 LM35 接腳圖 圖 3.9.2 LM35 實體零件
30
第四章
入庫停車硬軟架構
4-1 軟體架構
MAGA2560 系統初始化,將所有 LED 為關閉狀態和超音波感測器 Trig 設置為輸出腳,在進去判斷迴圈(LOOP)如下圖(4.1.1),則另外兩科紅外線 感測器因,微控器特性所以不需要做腳位定義,只要開發者有需要直接可 在撰寫程式中呼叫類比腳位即可運行。 圖 4.1.1 系統初始化 進入迴圈(LOOP)如圖(4.1.2)所示,當車道進入停車塔高度測量由第一 個超音波感測器,以確定車輛入庫在限高之內,此工作做運算與判斷,並 輸出訊號給人機介面做顯示。當車輛低於 160CM 准許進入,高於 160CM 不 能進入再將訊號傳給人性化介面做顯示(綠色 LED:准許進入,紅色 LED:不 能進入)。
31 車輛在進入車道中,4 個超音波感測器設置在兩側,測與車體間的距 離,微控器判斷量測距離是向左偏或向右偏,以人性介面顯示(黃色箭頭 LED 矩陣)修正方向。當車輛維持在車道中間且與車道兩側間距都大於 20CM 上距離,微控器驅動人性化介面顯示左右邊 LED 第一組箭頭提示駕駛,以 修正到最佳位置後,直行前進即可。溫度感測器(LM35)作為提供環境溫度 給超音波感測器的溫度補償之用提高超音波感測器穩定性。 當車輛直行車道至末端交由紅外線感測器量測,微控器接收紅外線感 測器與車輛距離,判斷是否已到達末端,再驅動人性化介面顯示 OK 綠色 LED 矩陣,完成入庫程序。 圖 4.1 2 LOOP 迴圈流程圖
32
第五章 實驗結果與討論
5-1 超音波感測器電路分析[10] 如圖(5.1.1)所示,HC-SR04 超音波測距模組,主要由 EM78P153S 微控 器、LM324 信號放大與 MAX232 差動放大動器組成。 當微控制器 EM78P153S 接收到 Trig 觸發信號時,會產生 TX1、TX2 40HZ 超音波信號,經過 MAX232 做差動信號的功率放大驅動超音波致動器送出超 音波輸出,當遇到障礙物時,反射的信號會由超音波接收器感測而產生微 弱的電壓信號,並送到由 LM324 構成的反相方大器、帶通濾波器、反相放 大器與比較器依序串接而成的信號處理電路做信號調節再回傳到 EM78P153S 微控制器進行運算與判斷工作並輸出 Echo 信號完成距離量測的 工作。 圖 5.1.1 HC-RS04 模組電路圖33 1.反相放大器 如圖(5.1.2)所示,一般雙電源 OP(運算)放大器,不需做特別直流準位 中心點調整,即可正常工作不會有失真問題。單電源的方式,需經由 R21 與 R16 兩顆電阻做分壓,將電壓固定在 VB= 1 2 VCC 提供中心點,使輸出 訊號可在電源電壓範圍做調節,且可以延伸到超音波感測器模組其他電路 應用可改善沒有雙電源的情況,避免信號失真。則 C8,C9 電容做直流濾 波,消除直流電源中雜訊且穩定電壓。 圖中看到,超音波感測器送出超音波,VI 接收端回收經由反射物信號, C7 做交流耦合電容,可阻隔直流訊號讓交流訊號通過,阻抗 Zc= 1 2𝜋𝜋𝜋 = 1 2∗3.14∗40𝑘ℎ𝑧∗10𝑛𝑛 = 398.081Ω,電壓增益 AV=− 𝑅2 𝑅1+𝑍𝜋≒− 𝑅2 𝑅1,Zc 阻 抗小可忽略不計,即輸出訊號會有 180 度的相位差。在超音波感測器模組 中,U2D 與 U2B 等同為反相放大器且功能相同。 圖 5.1.2 單電源反相放大器
34 2.單電源帶通綠通器 如圖(5.1.3)所示,U2C 帶通濾波器功能將高頻與低頻去除,只留下特 定範圍信號通過。VB 輸入點由前面反向放大器中的單電源篇壓電路所串 接到帶通濾波器[24],繼續應用。 圖 5.1.3 單電源帶通濾波器 3.非反相比較器 前面的訊號調節,現在經由非反向比較器處理如圖(5.1.5),轉換成數 位訊號的 High(邏輯信號 1) Low(邏輯信號 0)信號,再將輸出訊號串接 NPN(電晶體)做反相輸出的信號,送到 EM78P153S 微控器,做信號處理並以 Echo 腳位送給 Arduino Mega 2560 微控器再進行距離與溫度補償運算產生 結果。
35
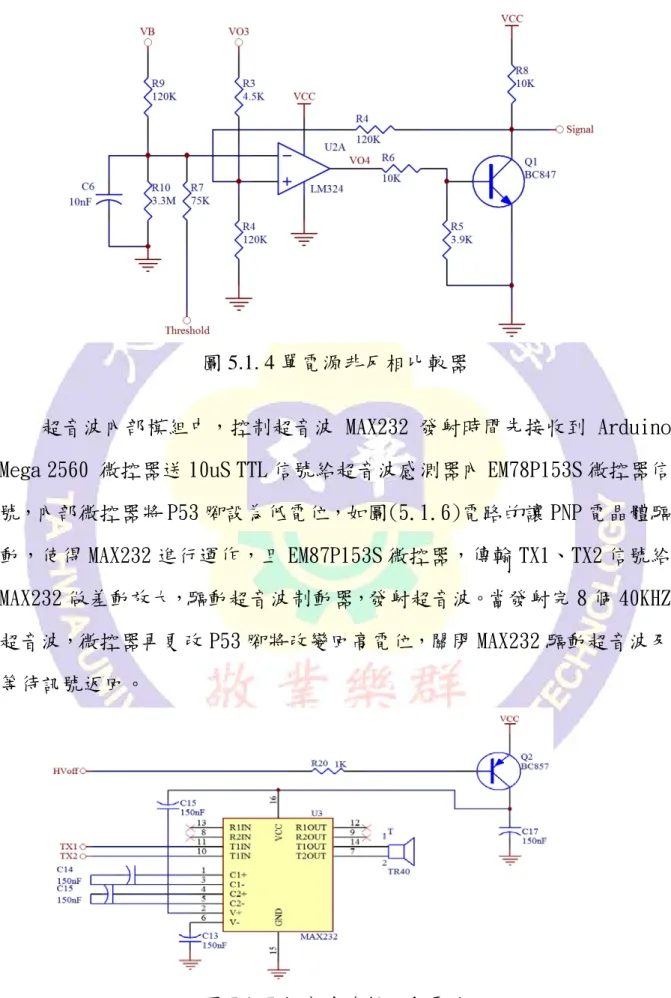
圖 5.1. 4 單電源非反相比較器
超音波內部模組中,控制超音波 MAX232 發射時間先接收到 Arduino Mega 2560 微控器送 10uS TTL 信號給超音波感測器內 EM78P153S 微控器信 號,內部微控器將 P53 腳設為低電位,如圖(5.1.6)電路的讓 PNP 電晶體驅 動,使得 MAX232 進行運作,且 EM87P153S 微控器,傳輸 TX1、TX2 信號給 MAX232 做差動放大,驅動超音波制動器,發射超音波。當發射完 8 個 40KHZ 超音波,微控器再更改 P53 腳將改變回高電位,關閉 MAX232 驅動超音波及 等待訊號返回。 圖 5.1. 5 超音波發射驅動電路
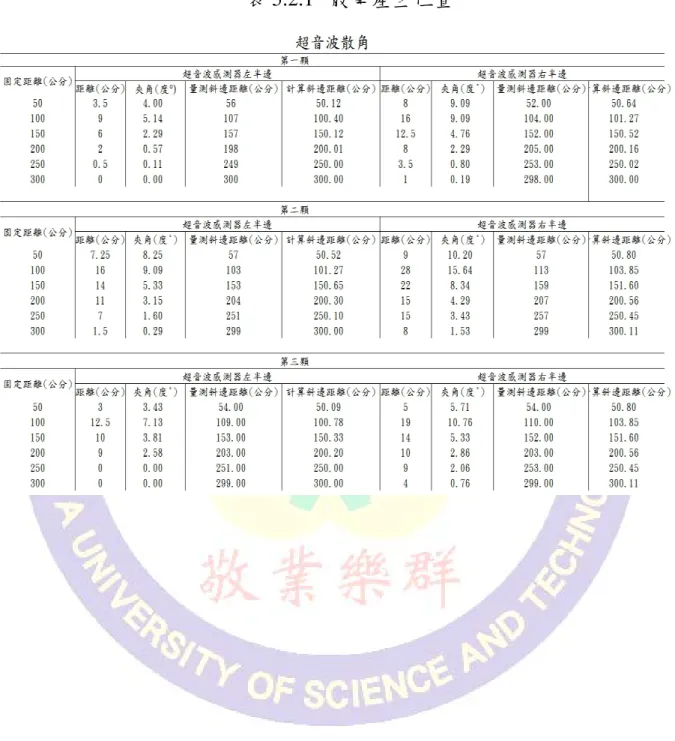
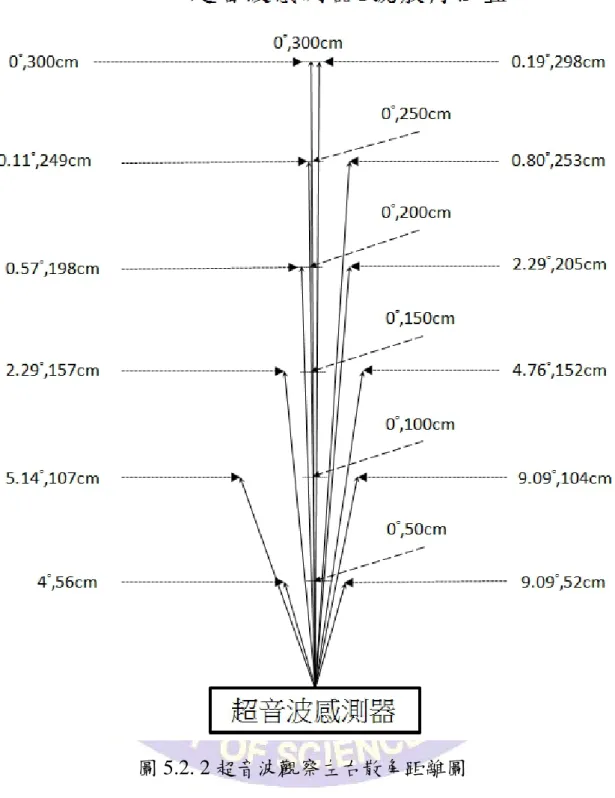
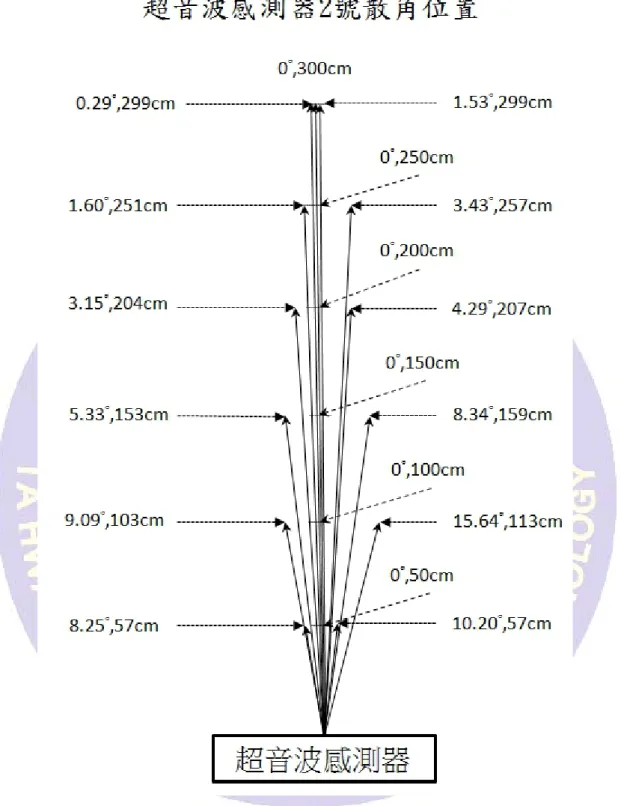
36 超音波模組由以上敘述電路組成[8],本文以固定距離 10 公分~300 公 分做量測,每次測量 20 次結果如表(5.1.1)中,計算出得到該距離之中的 平均誤差,再將表(5.1.1)製成圖(5.1.1)平均誤差都在±0.5 之間。 表 5.1.1 超音波感測器量測表 圖 5.1. 6 超音波感測器量測平均誤差 5-2 超音波散角 超音波感測器在聲波發射出去,有時反射音波會提前返回接收端,造 成在 Arduino 微控器顯示出距離結果有縮短與增加現象[25]。所以要先確 認這散角[4]在多少距離之下會產生。本文從 300 公分開始量測到 50 公分 為結束,如圖(5.2.1)超音波感測器與障礙物之間距離為 B,距離 A 則為量 測 0 度角與散角之間距離。每顆超音波感測器的散角的位置都不同,如表
37 (5.2.1)所示,在第一顆超音波感測器於 300 公分放置障礙物,利用反三角 函數(Actan)計算右邊、左邊散角兩邊θ角度如圖(5.2.1),在 300 公分得 出左邊 0 度角與右邊 0.19 度,超出角度範圍則無法量測。以公式(5.1.1) 計 算得出斜邊距離 C,量測與計算距離有些誤差。 C = √A2+ B2 (5.2.1) 如圖(5.2.2)、(5.2.3)、(5.2.4)中可知三顆的超音波散角會有所不同, 但其散角不大,量測距離誤差有限,所以在實用上並不影響車輛引導的功 能。 圖 5.2. 1 三角形計算斜邊與θ角示意圖
38
39
40
41
42 5-3 材質、顏色對紅外線類與超音波量測影響 將超音波感測器與紅外線感測器焊接置一塊 PCB 通用版圖(5.3.1),可 使兩者同時一起量測障礙物數值,在實驗前在文獻得知紅外線感測器被顏 色影響回傳電壓。 圖 5.3.1 超音波與紅外線焊接於通用板上 超音波本身音波返回利用時間差得到距離,音波照射到障礙物時該障 礙物會吸收聲波就會讓超音波反射的音波不足或提早返回,導致誤差產生。 本文研究要引導車輛進入停車塔,知道汽車的表面所使用的材料,鋼板、 鋁板、塑膠、鐵,等大部分四種,為汽車的生產主要原料。且汽車的烤漆 顏色會影響到量測時的反應。現今許多的愛車人士與車商都有推出消光(霧) 色烤漆,則消光烤漆本身跟平光烤漆最大差異在,在烤漆時加入消光粉成 分可使車殼本身降低光線的反射率,可讓車子顏色有種特別視覺感與觸覺, 還有車殼包膜方式。在實驗中做說明,選擇容易得到 4 種材料為鋁製櫃、 壓克力板、塑膠薄膜、牛皮紙,等 4 種不同顏色與材料最後特別非屬於車 體外觀材料海綿做觀察。 金屬鋁櫃與一般轎車常見的烤漆與金屬材質表面的特性相近,所以安 排它做超音波感測器與紅外線感測器做量測距離影響的實驗,此材料不偏 亮色的顏色且表面平滑,以 10 公分到 100 公分每隔 10 公分的距離測量。 由表(5.3.1)所示紅外線遇到障礙物反射約 80 公分就無法正常反應如 圖(5.3.2),然而超音波方面對於鋁板如表(5.3.2),則可正常輸出數據保
43 持在±1 公分的誤差內如圖(5.3.3)。
表 5.3.1 灰色鋁板紅外線感測類比電壓輸出測量表
44 圖 5.3.2 灰色鋁板類比電壓變化圖 圖 5.3.3 灰色鋁板超音波感測距離變化圖 白色壓克力板,屬於偏亮與平滑材質,相當汽車材料中的前保桿、後 保桿、車門,這三種的零件是以塑料材質製造而成。則壓克力板使用超音 波感測器沒有影響誤差保持在±1公分如表(5.3.4)、圖(5.3.5),沒有出現 很明顯的誤差值。在紅外線部分如表(5.3.3)所示,約 80 公分以上無法使 用,80 公分~90 公分輸出類比電壓相近導致轉換會被認定 80 公分距離範圍 如圖(5.3.5)。
45
表 5.3.3 壓克力板紅外線感測類比電壓輸出測量表
表 5.3.4 壓克力板超音波感測距離測量表
46 圖 5.3.5 壓克力板距離超音波感測距離變化圖 牛皮紙它跟前面兩者唯一不同是粗糙的表面,先前提到汽車烤漆有消 光(霧)色系烤漆,他使光線的反光能力降低,會視覺上有種神秘感的色調 出現,觸摸表面顆粒有感不如平光烤漆的光滑。實驗得出牛皮紙粗糙表面 並不影響超音波感測器的準確性,也不影響紅外線感測器類比電壓輸出。 得知表(5.3.5)、圖(5.3.6),紅外線出現類比電壓下降現象,如表 (5.3.6)所示,超音波感測器無超過 1 公分以上誤差如(5.3.7),未來在汽 車市場中,因應環保議題將使用紙漿作為汽車車體的材料之一,對於未來 這種新材料預先實驗。 表 5.3.5 牛皮紙紅外線感測類比電壓輸出測量表
47
表 5.3.6 牛皮紙超音波感測距離測量表
48 圖 5.3.7 牛皮紙超音波感測距離變化圖 黑色塑膠薄膜,如汽車外殼包膜。包膜現在也是一種愛車人士對汽車 烤漆保護意識,薄薄塑膠貼在車殼的表面,可讓灰塵只停在包膜的表面而 不會直接附著在烤漆上,只要水沖即可沖刷掉包膜表面的灰塵與髒汙。紅 外線感測器在文獻上有提到說,紅外線距離感測黑色系的障礙物的感測值, 會有電壓的影響或透光材質。顯然黑色塑膠膜在實驗結果,對超音波感測 器沒有任何量測上問題如表(5.3.8)、圖(5.3.9),紅外線感測器就有影響 力,表(5.3.7)中電壓在 10 公分處就先下降約 0.5V(伏特),而非前面個材 料中都有保持在 3.5V 輸出電壓。在 Arduino 計算結果會因 0.5V 差距會認 為紅外線感測器與障礙物是在 12~14 公分距離如圖(5.3.8),而提前讓 LED 顯示或不顯示依照開發者需求。
49
表 5.3.7 黑色塑膠膜紅外線感測類比電壓輸出測量表
表 5.3.8 黑色塑膠膜超音波感測距離測量表
50 圖 5.3.9 黑色塑膠膜超音波感測距離變化圖 本研究特別提出海綿做討論,雖然不是汽車車殼重要材料可是,針對 超音波的聲波衰減問題,且海綿本身觸摸與消光色系類似,此實驗印證超 音波是否很容易遇到較容易吸收音波的材質,出現很大誤差數值,海綿在 建材中有吸震吸聲的功效,如:卡拉 OK 隔音牆,汽車引擎附近的隔音墊, 都是使用海綿這等材料組成。使用此材料做觀察超音波是否可以正確的量 測到距離。 經由實驗海綿作為超音波感測障礙物得到的數據為 20~30 公分是無法 量測正確距離如表(5.3.10),而且其他距離誤差高於±1公分以上,這表 黑色塑膠
51 示超音波發射被大部份被海綿吸收/折射掉,造成音波反射時間過久,超音 波感測器回傳給 Arduio 計算顯示出超過廠商設定的 4 公尺距離,表圖 (5.3.11)。這表示,宴會廳的隔音牆為何都會有海綿在牆內的建材中。 紅外線感測器量測固定距離下如表(5.3.9)所示本身材質特性不影響 量測,作為障礙物如圖(5.3.10)所示,紅外線類比電壓曲線沒有任何變化。 表 5.3.9 海綿紅外線感測類比電壓輸出表 表 5.3.10 海綿超音波感測距離表
52
圖 5.3.10 海綿紅外線感測類比電壓輸出變化圖
圖 5.3.11 海綿超音波感測距離變化圖 紅色海綿
53 將 所 有 的 紅 外 線 感 測 器 如 表 (5.3.11) 與 超 音 波 感 測 器 [26] 如 表 (5.3.12),收集兩者感測器數據表,做出綜合比較表觀察,顯然黑色薄膜 對紅外線影響最深,其餘幾種材料沒有改變,最後他們的共通點都是 80 公分的類比電壓都無法使用如下圖(5.3.12)。另外,超音波感測器綜合比 較中,在所有材料測量距離數據上沒有較多誤差數據出現,在前面針對超 音波感測器對於棉質類實驗,驗證超音波對會吸收材料是沒有辦法做準確 量測如圖(5.3.13)。 表 5.3.11 綜合比較紅外線感測類比電壓測量表 圖 5.3.12 綜合紅外線感測類比電壓曲線
54
表 5.3.12 綜合比較超音波感測距離測量表
55 5-4 紅外線趨勢線對照 Prism 6 這套計算軟體如圖(5.4.1),計算在工程與商業上的應用軟體。 操作方面,依造使用者需求選擇對應的模式,輸入你的收集到的數據,且 在選擇運算模式進行運算,最後計算結果會顯示在其他欄位做編輯圖形, 本文僅運用多項式求得紅外線感測器線性回歸公式如圖(5.4.2)。 圖 5.4.1 Prism 6 軟體畫面 圖 5.4.2 Prism6 計算結果曲線圖
56
由於紅外線感測器類比輸出電壓與距離的關係為非線性,故需採用曲線擬 合方式,在 Arduino 中完成距離轉換,作法將類比電壓於 Arduinot 產生 ADC 的數據(可由 Serial Monitor 取得)後,再將距離(CM)與 ADC 數據做, 多項式與乘幂做比較,選擇出最適合的曲線擬合公式。 運用 Prism 6 把固定距離設定成 Y 軸,則 X 軸設為類比電壓轉換數值 (ADC)選擇多項式計算模式,得到曲線擬合公式如圖(5.4.3)與線性回歸圖 如圖(5.4.4)在將公式填入 Execl 做驗算。且 Excel 中也選擇多項式與乘幂 做曲線擬合公式做比較。如圖(5.4.5),經利用多項式與乘幂計算得出 10 公分處計算 Excel-81.41 公分、Prism 6 10.5 公分、乘幂 9.91 公分表 (5.4.1),發現 Prism 6 最佳適合應用。 表 5.4.1 紅外線 1 號 Execl 驗算觀察表
57
圖 5.4. 3 紅外線 1 號 Prism 6 計算結果
58 圖 5.4. 5 紅外線 1 Excel 乘幂與多項式與乘幂 紅外線 2 號,經過紅外線 1 號的方法,計算最佳曲線擬合公式圖 (5.4.6)BO:常數項數值、B1:一次項數值、B2:二次項數值、B3:三次項數值, 得出公式。進行驗算,演算軟體繪製曲線如圖(5.4.7)所示。Execl 乘幂與 多項式圖(5.4.8),Prism 6 專業運算軟體計算出來的公式,如表(5.4.2)10 公分處 ADC 為 711 數值乘幂 9.87 公分、Execl 177.39 公分、Pirsm6 9.72 公分,確認誤差較不多即可應用於 Arduino 做 ADC 轉換實際距離大小。
59
圖 5.4. 6 紅外線 2 號 Prism 6 計算結果
60 圖 5.4. 8 紅外線 2 號 Excel 乘幂與多項式與乘幂 5-5 超音波溫度影響 文獻提到超音波被環境溫度影響有很大關係,聲波會隨著溫度改變音 波速度,音波速度增加或減少影響著超音波感測器回傳時間有所變化,一 樣固定距離,量測結果也會改變產生誤差,將溫度補償應用在車輛入塔時 超音波感測器不會因為溫度影響而導致在車輛量測誤差。 LM35 溫度感測器測得環境溫度,先不加入音波公式讓超音波感測器在 36℃、30℃、25℃等三個溫度中做量測。此 3 種溫度變化做量測為 36 度超 音波感測器如表(5.5.1)、30 度超音波感測器如表(5.5.2)、25 度超音波感 測器如表(5.5.3)在將每一個平均誤差以曲線圖做觀察如圖(5.5.1)、圖 (5.5.2)、圖(5.5.3),顯然溫度越高對音波影響越明顯。 加入音波溫度補償公式內331(空氣) + 0.6 ∗ T,在 Arduino 超音波運算 式中測量,於環境溫度為 36℃做溫度補償實驗,可改善高溫帶來給超音波 感測器誤差。經過溫度補償讓超音波感測器在 36℃溫度中如表(5.5.4),
61
觀察誤差明顯的保持在誤差±0.6 公分內[27],停車塔環境溫度之用,而不 被環境溫度影響。
62
圖 5.5.1 36℃超音波誤差曲線圖
63
圖 5.5.2 30℃超音波誤差曲線圖
64
圖 5.5.3 25℃超音波誤差曲線圖
65
表 5.5.4 超音波 36℃修正
66 5-6 紙箱模擬進入停車塔[28] 實驗使用大小約長 36C*高 24CM*寬 25CM 紙箱如圖(5.6.1),作為車身 範例,硬體擺設如下圖(5.6.2)所示,將超音波感測器放置圖中 4 種位置, 以及 2 個紅外線感測器至於車道末端,最後將高度超音波感測放置,車道 外面上方以測量車身高度。 圖 5.6. 1 以紙箱模擬車身 圖 5.6. 2 車道擺設感測器位置圖 現代車款型與車身都不同,還有車主加購車頂行李廂料件,放置腳踏 車、路營器具,但停車塔車位與車位高度有一定間隔距離,防範車輛過高
67 造成建物與車輛的毀損,才允許進入車道內相對通過高度限制[29]。用紙 箱的中空部分作為高度低標準(大於 10CM 以上),再換成箱子底部朝上讓表 示車輛車頂過高(低於 10CM 以以上),則 LED 過高顯示紅色禁止 LED 圖 (5.7.3),在範圍內就是綠色圈形符號准許進入圖(5.7.4)。 圖 5.6.3 紅色 LED 顯示車身太高禁止進入 圖 5.6.4 綠色 LED 顯示車身高度較低允許進入
68
使用紙箱做模擬進入車道,如圖(5.6.5)(A)很貼近右邊超音波感測器, 此如表(5.6.1)測得 8 公分[30]LED 顯示四個的箭頭,表示必須向左修正,快 到車道中央時兩邊箭頭亮起,表示只需須直行即可。當駕駛偏移某方向, 會以如圖(B)方式多一顆箭頭提示需要再往左邊修正,如圖(C)所示修正過 後保持在兩邊箭頭繼續直行,準備到達車道末端交由紅外線感測器與紙箱 在 20 公分距離內圖(D),顯示「OK」LED 顯示完成了入塔引導過程。 表 5.6. 1 偏右進入車塔數值紀錄
69 (A)進入車道偏右向左修正 (B)偏右邊向左微修正 (C)修正完畢直行駛入 (D)到達車道末端 LED”OK”顯示 圖 5.6. 5 車輛偏右進入動作圖 當向左偏進入車道如表(5.6.2)進入方想與左偏相反,此時 LED 以要求紙箱(駕駛) 向右做修正如圖 5.6.6(A),在修正時繼續前進,有向右偏移 LED 多顯示箭頭提示需往 左做微修正圖(B),到達末端紅外線測量紙箱與紅外線距離在設定內距離,透過微控器 處理驅動 LED 「OK」字型,表示已到達定位如圖(C)。
70
71
(A)進入車道偏左向右修正 (B)微偏右向左修正
(C)以到達車道末端 LED”OK”顯示 圖 5.6. 6 車輛偏左進入動作圖
72
第 6 章 結論與未來展望
6-1 結論本研究利用 Arduino Mega 2560、超音波感測器、紅外線感測器、LED 矩陣整合成停車塔進入車道修正系統,經由這些感測器量測結果,並以人 性化界面提示車輛駕駛在入塔時,不確定車道與車外狀況,利用微控器輸 出信號於 LED 矩陣,使箭頭方向左右、OK 字樣 LED、禁止與進入標誌,給 予駕駛良好的提示。 本文研究超音波感測器於障礙物在距離量測準確性跟穩定性,超音波 被環境溫度跟散射角等問題,超音波感測器隨著環境溫度改變誤差也跟著 增加,利用溫度感測器和音波公式 311*06(T),補償溫度帶來的距離誤差。 而散射角造音波提早反射回感測器,產生超音波距離干擾,將超音波感測 器位置安裝向上提高,改變散射角出現的位置就可以抵制干擾問題,保持 超音波感測器穩定性。 紅外線感測器對障礙物之間距離,利用感測器類比的電壓輸出,得出 電壓高距離近,反知電壓低距離遠,由量測此為非線性的電壓與距離關係, 已利用曲線擬合軟體找 Pirsm6 出最佳公式,再將公式應用於微控器 Arduino 中,就可以顯示出紅外線感測器在量測距離上,程式設計的方便性。 6-2 未來的展望 本研究具有精簡人力、減少車輛碰撞風險之優點,且讓駕駛者感覺方 便與安全,未來停車塔導引與停車塔管理系統連結,將停車塔資訊上傳至 網路提供給有需求停車位的駕駛,消費者可以透過手機 APP 搜尋市區的停 車塔空位。
73
參考文獻
[1] Mateusz Bilewski, Grzegorz Putynkowski,Application of ultrasonic distance sensors for measuring height as a tool in unmanned aerial vehicles with a stabilized position in the vertical plane, Zeszyty Naukowe Akademii Morskiej w Szczecinie2016,17–21
[2] 張益,使用超音波感測器之大客車倒車警示系統,龍華科技大學電機工 程系碩士班,2017。
[3] Alessio Carullo、Marco Parvis,An Ultrasonic Sensor for Distance
Measurement inAutomotive Applications,IEEE SENSORS JOURNAL, VOL. 1, NO. 2, AUGUST 2001 [4]盧明智、盧映宇,感測器應用與線路分析[修訂二版],全華圖書,2009 年 08 月,pp.第 2 章 9-17、第 17 章 12-14、第 18 章 1-8。 [5] 陳巧茵,小型自走車以超音波避障之研究,國立成功大學工程科學系碩 博士班,2002,pp.39-47。 [6] 梅克2工作室,Arduino 微電腦控制實習[第二版],台科大圖書,2014,pp.13 章 1-8。
74
[7]趙英傑,超圖解 Arduino 互動設計入門(第二版),旗標科技股份有限公 司,2014 年 4 月,pp. 第 9 章 24-30。
[8] A. K. Shrivastava, A. Verma, S. P. Singh ,Distance Measurement of an
Object or Obstacle by Ultrasound Sensors using P89C51RD2, International Journal of Computer Theory and Engineering, Vol. 2, No. 1 February, 2010
[9] Pengyang Li, Qiang Liu, Shujuan Li, Quandai Wang, Dongya Zhang, Yan Li,Design and numerical simulation of novel giant magnetostrictive ultrasonic transducer, (2017)3946-3954
[10] Fuhliang WEN , Chao-Chun WEN ,Ming-Hung LAI , Ichien HSU
An Ultrasonic Actuating Driver for a Central Supporting Bending Mode Using a Motional Current Technique, IEICE TRANSACTIONS on Electronics Vol.E92-C No.8pp.1058-1065
[11] 曾 兆 弘 , 超 音 波 測 距 系 統 設 計 , 中 華 大 學 機 械 與 航 太 工 程 研 究 所,2005,pp36-48。
[12] Jeffrey J. McLean INTERDIGITAL CAPACITIVE MICROMACHINED ULTRASONICTRANSDUCERS FOR MICROFLUIDIC APPLICATIONS, August 17, 2004
75
[13] 賴文彬 鍾文耀,混合訊號模式超音波測距系統電路設計,科學與工程 技術期刊 第九卷 第二期 民國一○二年,pp31-45(2013)
[14] 曹家銘,清潔機器人之室內定位,北台灣科學技術學院機電整合研究 所,2009,pp.4-8。
[15] Sharefeels,紅外線與遠紅外線的差異 [Online] , Available:
http://sharefeels.pixnet.net/blog/post/351170585-紅外線與遠紅外線的差異
[16] 愛經驗,[Online],Available:
http://www.how01.com/post_q6O6LMWGwz1Jo.html
[17] 機器人及無人機測距中紅外線和雷射誰更靠譜,
[Online],Available:https://read01.com/zh-tw/dK6EL7.html#.Wzh0ndUzbIV
[18] B.Alexander Cope A Robotic Platform for Internal Inspection, November 22, 2012
[19] Sundaram A, 2Ashenafi Paulo’s Forsido, Dawid Adane, ULTRASONIC
SENSOR BASED OBSTACLE DETECTION FOR AUTOMOBILES, I n t e r n a t i o n a l J o u r n a l o f R e c e n t T r e n d s i n Engineeri
76
[20] 徐 健 人 , 紅 外 線 導 引 之 自 走 機 器 人 , 國 立 臺 灣 科 技 大 學 機 械 工 程 系,2011,pp11-18。
[21] Pololu Pobotice & Electronics,[Online] ,Available: https://www.pololu.com/file/0J811/sds02a-schematic.pdf
[22] MikoElektronika,[Online] ,Available:
https://www.mikroe.com/blog/ir-distance-click-know-just-how-far-you-are
[23] Pololu Pobotice & Electronics,[Online] ,Available: https://www.pololu.com/file/0J812/gp2y0a60szxf_e.pdf
[24] Fuhliang WEN,Chao-Chun WEN,H.Lin,Frquency Adaptive Diver for Ultrasoinc Vibrators with Motional Current Feedback, Instruments and Experimental Techniques, 2013, Vol. 56, No. 1, pp. 104–112.
[25] L. Koval,J.Vaňuš,P. Bilík,Distance Measuring by Ultrasonic Sensor,IFAC-PapersOnLine 49-25 (2016) 153–158
[26] Zlatin Zlatev,Tanya Pehlivanova,Antoaneta Dimitrova,Stanka Baycheva,Ira Taneva,Krasimira Keremidchieva DEVELOPMENT OF AN ULTRASONIC DEVICE FOR QUALITY EVALUATION OF YOGURT Engineering Review, Vol. 38, Issue 3, pp.279-287, 2018
77
[27] Harold Paulk Henderson, Jr. Relative Positioning of Unmanned Ground Vehicles Using Ultrasonic ensors, 10 MAY 2008
[28] M.Y.I.Idris,E.M.Tamil,N.M.Noor,Z.Razak and K.W.Fong,Parking Guidance System Utilizing Wieless Network and Ultrasonic sensor, International Technology Journal 8(2):138-146,2009
[29] Amin Kianpisheh, Norlia Mustaffa, Pakapan Limtrairut and Pantea Keikhosrokiani Smart Parking System (SPS) Architecture Using Ultrasonic Detector, International Journal of Software Engineering and Its Applications Vol. 6, No. 3, July, 2012
[30] Tunai P. Marques,AUTONOMOUS ROBOT FOR MAPPING USING ULTRASONIC SENSORS, August 2016

![圖 3.6.2 GP2Y0A60SZLF 電路圖[21]](https://thumb-ap.123doks.com/thumbv2/9libinfo/7270588.69469/29.892.143.773.112.1072/圖362GP2Y0A6SZLF電路圖21.webp)