I
義守大學
機械與自動化工程學系
碩 士 論 文
具 中 繼 通 訊 聯 絡 四 軸 飛 行 器
暨 地 面 車 輛 之 開 發
Development of anlntermediate
Communication Systembetween quadcoper
and vehicle
研
究 生 : 張 育 嘉
指 導 教 授 : 徐 祥 禎 教 授
具 中 繼 通 訊 聯 絡 四 軸 飛 行 器
暨 地 面 車 輛 之 開 發
Development of anlntermediate
Communication Systembetween quadcoper
and vehicle
研
究 生:張育嘉 Student:CHANG,YU-CHIA
指 導 教 授:徐 祥 禎
Advisor:HSU,HSIANG-CHEN
義守大學
機械與自動化工程學系
碩士論文
A ThesisSubmitted to Department of Mechanical and Automation Engineering I-Shou University
in Partial Fulfillment of the Requirements for the Master degree
in
義 守 大學
機械與自動化工程學象碩士在職專班
, 論文口試委員會審定書
本校機械與自動化工程學系碩士在職專班張育嘉君
所提論文 具中繼通訊聯絡四軸飛行器暨地面車輛之開發
Develooment of a auadcooer and vehicle with
Intermediate Communication Svstem.
合於碩 士資格水準’ 業經本委員會評審認可
口試委員
手
t,
,f
l<
泣7
指導教授:
�主任
中華民國
104年07
月
27日
會具中繼通訊聯絡四軸飛行器
暨地面車輛之開發
摘要
本論文主要目的在設計並製作四軸飛行器與影像無線資料傳輸,不 需要事前規劃臨時以下達指令對外的聯絡,與對外車輛監控工作執行, 在面對不同的惡劣環境及危險性工作,降低人員傷亡,可以擴展工作的 範圍並方便移動去執行任務。 本研究利用裝設於具中繼通訊聯絡四軸飛行器之開發攝影機做影像 回傳,使用WI-FI 操控掌握所處環境及工作物件相對方具中繼通訊聯絡 四軸飛行器關係並且即時監控移動式,操作者在遠端經由攝影機的影像 來控制和執行相對的動作以完成所需的任務。本研究 Arduino 控制器與 UART 透過網路,由 UART 網路傳達訊息至電腦下達指令 Arduino 控制 器,進行車輛控制,搭配WI-FI 移動載具台轉播站發送及接收資料,影 像動態由攝影機傳達,最後在主控電腦上,即時控制及監控,整合不同IV
Development of anlntermediate
Communication Systembetween
quadcoper and vehicle
ABSTRACT
The main purpose of this paper is to desingn and fabricatean intermediate communication system between quadcopter and ground vehicle. No advance planning,wireless data and video transmission can be temporarily commandedfor foreign liaison following up.The implementation and monitoring of the work of foreign vehicles in various harsh environments and hazardous worksare capable to reduce staff casualties as well as extend the range of work and to facilitate the moving tasks.
In this study, an installation of relay communications quadcoptercan be achieved by the developed two-way video camera with the usage of Wi-Fito manipulate their environment and control work items.With the opposite party relay communicatedquadcopter and real-time monitoring of mobile users (operators) at the far end are easily control and execute the corresponding actions and complete the required tasks via a video camera. The command of Arduino controller and UART is following by (1) the UART convey the message to the directed Arduino controller via internet, (2) the vehicle with Wi-Fi mobile carried broadcast station to send/receive dataand dynamic image conveyed by camera, (3) the host computer instantaneously control and monitor for real-time integration of different conditions to complete the task.
Keywords: intermediate communication, quadcopter, ground vehicles,real-time, Arduino.
致謝 時光飛逝,這篇論文終於能夠完成,首先要感謝的就是指導教授徐祥禎 老師。回首兩年間在部隊與學校往來的求學歷程,我受到諸位部隊長官、 師長與家人的協助與鼓勵,實有說不盡的感謝話語。 於論文寫作期間,要特別感謝徐祥禎老師與 符志強老師給予學生諸多 意見與指導。感謝老師們於論文與理論架構、研究方法與實驗設計等等 方面給予我細心的指導與幫忙;另外也感謝 學弟宇信協助我完成所有 實驗使得本篇論文實驗順遂。感謝兩位口試委員,符志強老師與吳士傑 老師,在萬般忙碌時抽空於口試中對我的指導使本論文最後益臻完善。 最後,我要感謝我這一生最重要的淑珍。不論我遭遇任何挫折都在我身 邊給予我鼓勵與支持,她的鼓勵是我勇於挑戰的原動力,有她支持才使 我更加堅強。
VI
目錄
摘要 ... III ABSTRACT ... ...IV 目錄 ... VI 圖目錄 ... VIII 表目錄 ... IX 第一章緒論 ... 1 1.1 前言 ... 1 1.2 研究方法 ... 2 1.3 論文架構 ... 3 第二章文獻回顧 ... 4 2.1 四軸飛行器之原理 ... 4 2.2 四軸飛行器與現今科技之整合 ... 5 第三章 實驗系統平台介紹 ... 6 3.1 實驗系統架構 ... 6 3.2 軟體發展環境 ... 9 3.3 感測器單元 ... 9 3.3 虛擬實境之應用軟體與周邊設備 ... 13 第四章 實驗方法 ... 15 4.1 完成數據 ... 15 4.2 實驗流程 ... 22 4.3 討論 ... 24 第五章結論及未來展望 ... 245.1 實驗結論 ... 24 5.2 實驗討論 ... 25 參考文獻 ... 27
VIII
圖目錄
圖 2‐1 Flying Octopus ... ...4 圖 3‐1 系統架構 ... 6 圖 3‐2 配線圖 ... 7 圖 3‐3 Arduino 控制核心 ... 8 圖 3‐4 Arduino 控制核心作動 ... 8 圖 3‐5 CCD 攝影機實體圖 ... 10 圖 3‐6 無線影音收與發模組 ... 12 圖 3‐ 7 MyTV 數位電視錄影卡 ... 14 圖 4‐1 流程一 ... 22 圖 4‐2 流程二 ... 22 圖 4‐3 流程三 ... 23 圖 4‐4 具中繼通訊聯絡四軸飛行器暨地輛連結示意圖...23表目錄
表3-1 CCD 攝影機模組規格表 ... 11 表3-2 無線影音收與發模組規格表...13
1
第一章 緒論
1.1 前言
早期的電腦速度與網路傳輸速度受到限制,無法處理大量的資料,隨著 電腦科技日異月新進步,遙控四軸飛行器,以達到遠端遙控的目的,主控端 的電腦無法用無線傳輸方式控制受控車體,若整台電腦搬到受控車體上,車 體沒有做得很大,就無法負載那麼重的個人電腦,重量將會減低車體的運動 性能,也會佔去很多空間,造成許多的不便利。 第二個方式就是使用有線的方式做控制,電線的缺點就是會被障礙物給 影響,而且車體無法靈活任意活動,因為有可能會被自己的配線給綁住,所 以整體研究把重點放在透過無線四軸飛行器的方式做現場點線的控制,減少 障礙物遮蔽,用無線的地面車輛架設攝影機接收影像增加操控人、事、地現 況即時掌握。結合網際網路的遠端控制,透過 Microsoft Windows XP 視窗裡 的"遠端遙控桌面"程式,即能達到遠端控制的目的,本文裡就只在附錄裡 單純描述操作的方式。研究成果能對未來救援及地形勘探飛行任務有受益的 一面。1.2 研究方法
雖然台灣有科技之島的美稱,國內投入這方面的相關研究卻非常有限, 主要原因在於設備成本與使用率的問題,不過為了安全顧慮,還是有其發展 的必要。本研究的想法是製作一個可以即時控制具中繼通訊聯絡四軸飛行器 暨地面車輛連結, 以動態模擬方式實現構想,用它來使用各種惡劣環境,移動指定的地方, 安置於定點,由通訊聯絡四軸飛行器,傳達至地面車輛。實驗為達即時監控, 在車輛末端加上攝影機做影像回饋,加入行動電源拉長使用時間,即能認知 所處環境及工作物件相對關係,攝影機的動作角度會隨機車輛方向連動,就 能省下一些控制的麻煩度。本研究以通訊軟體的設計及整合控制器為重點, 利用 VB 設計可即時控制的監控程式,車上的控制器及感測器則搭配飛行模 擬器及NET 網路與 I/O 發展規劃,整合 VB 及 C#兩種程式語言來完成即時 控制的目的,最後加入無線模組,減少電線的羈絆,讓車子的移動更無拘束。3
1.3 論文架構
第一章 緒論:介紹本系統的研究動機與背景及本文的研究方法與全文簡述。 第二章 文獻回顧:針對四軸飛行器的原理以及整合科技的發展為主軸,配合 本研究的方向收集資料。 第三章 實驗系統平台介紹:介紹實驗系統硬體 Arduino 及系統軟體 NET 網 路與I/O,以及 VB 程式規劃軟體在自動控制上的使用,並說明本論文控制器 的設計規劃。 第四章 實驗方法介紹:具中繼通訊聯絡四軸飛行器暨地輛連結流程。 第五章 結果與討論。 第六章結論:具中繼通訊聯絡四軸飛行器暨地輛連結分析與討論,並提出具 體的方案以解決所遇問題。第二章文獻回顧
文獻回顧方面,以四軸飛行器之原理以及四軸飛行器與現今科技之相關 技術結合作蒐集。2.1 四軸飛行器之原理
1923 年美國製造的四軸飛行器 Flying Octopus[1],又稱四旋翼是一種多軸 飛行器,如圖2-1。 因四軸飛行器是利用不穩定空氣力學來飛行,需透過人為操控才能達到 穩定飛行,多軸飛行器是透過線傳飛控系統,遙控若無法傳達,就無法啟動, 四個懸翼懸停,是在維持平穩姿態與固定翼飛機絕大不同,它的四個旋翼大 小相同位置相鄰,相對速度是在調解不同位置的推力,通過旋翼提供推力使 飛機起飛,每個旋翼都會有反扭力矩;跟一般直升機不同,直升機有兩個旋 翼與尾槳抵銷主旋翼產生的扭矩,並控制飛機偏離航道的功用。 圖2-1Flying Octopus5
2.2 四軸飛行器與現今科技之整合
近年來四軸飛行器在無人機上再重新獲得肯定,隨著科技進步透過智慧 型手機發展,GPS、電傳飛行控制系統的發展、CCD 攝影機;本實驗室簡單 四軸飛行器透過而另一邊收入訊息下達指令。雖然只應用簡單的機械連桿原 理,沒有用到複雜的電子元件,在網際網路與四軸飛行器技術整合,之後隨 著時代的進步,電腦硬體的提升加快處理的能力,開始發展電腦透過WI-FI 技術,模擬畫面可以應用在遠端的控制上,讓介面更加人性化。網路速度越 來越快,可以傳輸的影像就比較不會延遲,透過遠端無線控制。 四軸飛行器優點體積小,重量輕方便攜帶,能輕易進入人不易進入的各 種惡劣的環境,廣泛用來製作模型,常用來航拍或空拍取景、實時監控,地 形勘探等飛行任務。第三章實驗系統平台介紹
3.1實驗系統架構
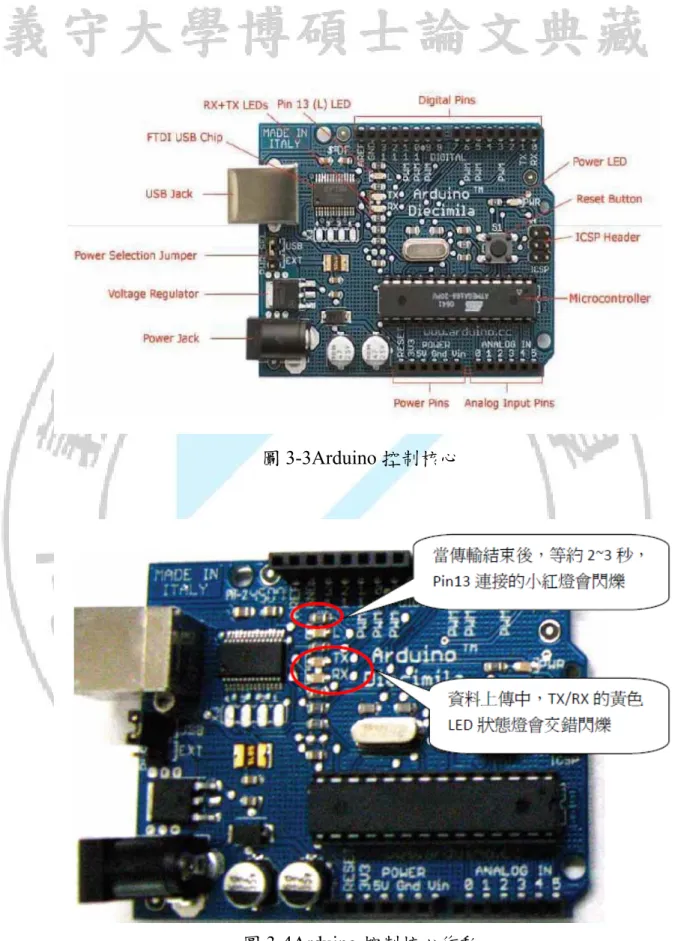
隨著電腦的普及化本章內容說明控制系統分為四個部分。 (1) 地面載具:雙套電源系統增加系統穩定性、Timel的相位鎖定PWM mode、 A Tmega328 PU IC取代控制器、UART轉網路、網絡攝影機、市售RC遙 控車。 (2) 空中載具:市售四軸飛行器、吊掛網路無線基地台。 (3) 網路架構:設置於地面站並設定Client mode、使用三台1W無線網路基地 台、設置於地面載具並設定Client mode、設置於空中載具並設定AP Mode。 上面所述三者的關係如圖3-1所示。核心 數位 電源 不同 滅 路設 以在 Arduino 控 心使用八位 位式輸出/入 源(5V~9V) 同的電子裝 、喇叭發聲 設計圖、韌 在網路上用 控制核心— 位元 ATME 入端,6 個 )或是直接 裝置,例如 聲、馬達運 韌體都可以 用很便宜的 —硬體微控 EGA8 系列 個類比式輸 接使用USB 如LED 燈 運轉。Ard 以在網路上 的價錢買到 7 控制面板是 列的的微控 輸出/入端, B 電源,使 、喇叭、馬 duino 控制 上下載,稍 到。 圖3-2 配 是一個掌心 控制器如圖 支援USB 使用者可以 馬達,然後 制板採用開 稍具電子知 配線圖 心的大小,圖 圖 3-3、圖 B 資料傳輸 以在數位式輸 後再由控制 開放式源碼 知識就可以 圖2-2 為配 3-4,提供 輸,可以使 輸出/入端 制器來驅動 碼設計的概 以自行製作 配線圖, 供 14 個 使用自備 端上接上 動燈的亮 念,電 作;也可
9
3.2 軟體發展環境
軟體部分則是Arduino開發環境,新版本出到0017版,可以在網路上免費 下載 (http://arduino.cc/);使用的語法和C/C++相仿,實際上底層使用的是avr‐ gcc的編譯器,骨子裡流的就是C/C++的血液,稍具C/C++程式設計經驗,很 容易就能上手。3.3 感測器單元
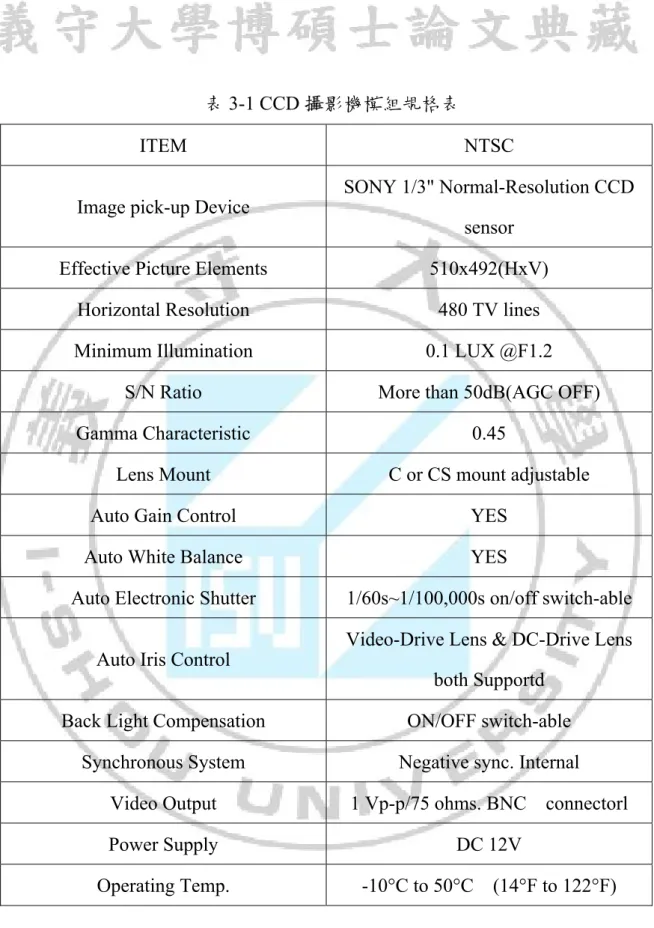
本文所使用的感測器為超音波測距與CCD無線攝影機,CCD相當於機器 的眼睛,讓我們在遠端做無線遙控時,也能很清楚觀察到現場的情形。不過 CCD鏡頭只有一個,無法像人的雙眼有兩個可以產生立體的影像,對於距離 的判別上可能會有些許的誤差,因此加裝超音波測距模組回報精確的距離資 料,可讓操作者更清楚移動式機械手臂離障礙物或是被夾取物還有多少距離, 以避免產生碰撞。無線CCD 模組的 CCD 為光電耦合元件(Charge Coupled Device)的簡稱, 其運作原理為:當有外來光線照射時,會將光波轉換成為電波訊號,再經由 影像處理器轉換成影像,之後通過同步加法器就能將影像重現在顯示幕上。 本文所使用的CCD 攝影機是由半球形攝影機所拆下,半球形攝影機為了安裝 美觀,特別使用半球形外盒將裡頭的 CCD 攝影機包裝以達防塵與美觀的目 的,因為安裝空間的考量,所以就不再使用這個半球形外盒,拆下的攝影機 體積比半球形外盒要小很多,就能方便安裝,圖3-1 是 CCD 攝影機的實體圖, 半球形攝影機的型號是 Conventional CCM-010,規格如表 3-1 所示。
11
表3-1 CCD 攝影機模組規格表
ITEM NTSC
Image pick-up Device SONY 1/3" Normal-Resolution CCD sensor
Effective Picture Elements 510x492(HxV) Horizontal Resolution 480 TV lines Minimum Illumination 0.1 LUX @F1.2
S/N Ratio More than 50dB(AGC OFF) Gamma Characteristic 0.45
Lens Mount C or CS mount adjustable Auto Gain Control YES
Auto White Balance YES
Auto Electronic Shutter 1/60s~1/100,000s on/off switch-able Auto Iris Control Video-Drive Lens & DC-Drive Lens
both Supportd Back Light Compensation ON/OFF switch-able
Synchronous System Negative sync. Internal Video Output 1 Vp-p/75 ohms. BNC connectorl Power Supply DC 12V
半球形攝影機裡的模組只有擷取影像的功能,因為它原本的設計是用來 倒掛在天花板上做監看的用途,通常固定於室內之後就不再變動,所以一般 都用有線的方式連接到主機上,如果要以無線的方式傳送影像,就要搭配影 音無線傳送模組一起使用,本文所使用的影音傳輸模組發射端的型號是 PDMAVST1000D,接收端的型號是PDMAVSR8000D,圖3-6是無線影音收與 發模組的實體圖,左邊的是發射端,右邊的是接收端,上頭有個按鈕可以切 換頻率,要切換到相對應的頻率才有辦法使用。表3-2為無線影音收與發模組 的規格表。 圖3-6 無線影音收與發模組
13 表3-2 無線影音收與發模組規格表 產品代號 PDMAVST1000D PDMAVSR8000D 頻率 2400MHz ~ 2483MHz 2400MHz ~ 2483MHz 發射功率 10dBm 接收敏度 -80dBm 頻道 2414,2432,2450,2468MHz 2414,2432,2450,2468MHz 頻率誤差範圍 ±100KHz ±100KHz 影像輸入大小 Level 1Vp-p 影像輸出大小 Level 1Vp-p 聲音輸入大小 Level 1Vrms 聲音輸出大小 Level 1Vrms 電源供應 5V 5V 功率損耗 0.5W 1W
發射器天線 Patch Antenna Patch Antenna 操作溫度 0 ~ 60 °C 0 ~ 60 °C
3.3虛擬實境之應用軟體與周邊設備
無線影音接收機收到訊號之後,必須要把訊號傳到電腦裡,才有辦法在 控制端的監控螢幕顯現出影像,所以要有影像擷取卡,來處理影像訊號。本 文所使用的擷取卡是My TV 數位電視錄影卡,如圖 3-7。這是採用 Philips 晶 片視訊處理器,視訊清晰度、色彩飽和度及畫面穩定度,都比一般影像擷取 卡還要好,還可以使用錄影功能,可錄下機械手臂工作時的影像當作紀錄。15
第四章實驗方法
4.1 完成數據
電腦端數據 Imports System.Net Imports System.Net.Sockets Imports System.Text Public Class Form1 '前後:62‐31 '左右:59‐39 Dim tcp As TcpClient Private Sub TrackBar1_MouseUp(sender As Object, e As MouseEventArgs) Handles TrackBar1.MouseUp Timer1.Enabled = True End Sub Private Sub TrackBar1_Scroll(sender As Object, e As EventArgs) Handles TrackBar1.Scroll Timer1.Enabled = False End Sub Private Sub Button1_Click(sender As Object, e As EventArgs) Handles Button1.Click Try tcp = New TcpClient(TextBox1.Text, Int(TextBox2.Text)) If tcp.Connected = True Then 'BackgroundWorker1.RunWorkerAsync() Beep() End If Catch ex As Exception MsgBox(e.ToString) End Try AxLiveX1.PlayX() End Sub Private Sub Timer1_Tick(sender As Object, e As EventArgs) Handles Timer1.Tick Dim mid As Integer = 50If TrackBar1.Value = mid Then Exit Sub End If If TrackBar1.Value > mid Then TrackBar1.Value = TrackBar1.Value ‐ 1 End If If TrackBar1.Value < mid Then TrackBar1.Value = 1 + TrackBar1.Value End If End Sub Private Sub TrackBar1_ValueChanged(sender As Object, e As EventArgs) Handles TrackBar1.ValueChanged Dim buf() As Byte = {2, CType(TrackBar1.Value, Byte), 10} 'Dim buf() As Byte = {CType(TrackBar1.Value, Byte)} Try tcp.GetStream.Write(buf, 0, buf.Length) Catch ex As Exception End Try Label1.Text = TrackBar1.Value End Sub Private Sub Form1_Load(sender As Object, e As EventArgs) Handles MyBase.Load AxLiveX1.SetGUIMode(3, 0, 0) AxLiveX1.SetCntDeviceType(1) AxLiveX1.EnableAutoScreenSize(False) AxLiveX1.IpAddress = "192.168.0.2" AxLiveX1.CommandPort = Int("10000") AxLiveX1.DataPort = 5550 AxLiveX1.AudioDataPort = 6550 AxLiveX1.UserName = "admin" AxLiveX1.Password = "admin" AxLiveX1.DisablePWD = True AxLiveX1.SetReceiveImageSize(2)
17 'BackgroundWorker1.RunWorkerAsync() Beep() End If Catch ex As Exception MsgBox(e.ToString) End Try AxLiveX1.PlayX() AxLiveX1.SetReceiveImageSize(2) End Sub Private Sub Label2_Click(sender As Object, e As EventArgs) Handles Label2.Click TrackBar2.Value = 47 End Sub Private Sub TrackBar2_ValueChanged(sender As Object, e As EventArgs) Handles TrackBar2.ValueChanged Dim buf() As Byte = {3, CType(TrackBar2.Value, Byte), 10} Try tcp.GetStream.Write(buf, 0, buf.Length) Catch ex As Exception End Try Label2.Text = "←" & TrackBar2.Value.ToString Dim lc As Point lc.X = Label2.Location.X lc.Y = 165 ‐ ((TrackBar2.Value ‐ 50) * 10) ' Label2.Location = lc End Sub Private Sub Button2_Click(sender As Object, e As EventArgs) Handles Button2.Click AxLiveX1.ShowQulMenuX() End Sub Private Sub Button3_Click(sender As Object, e As EventArgs) Handles Button3.Click AxLiveX1.PTZControlX() End Sub End Class
車輛端數據 /* * Wi_FiCar.c * * Created: 2015/3/8 下午 03:32:29 * Author: SG */ #define F_CPU 20000000UL #include <avr/io.h> #include <util/delay.h> #include <avr/interrupt.h> #include <avr/wdt.h> #include <stdio.h> #define BAUDRATE 9600 //設定 UART 通信速率 #define BAUD_PRESCALLER (((F_CPU / (BAUDRATE * 16UL))) ‐ 1) //計算 UART 通信速 率 //Declaration of our functions void USART_init(void); unsigned char USART_receive(void); void USART_send( unsigned char data); void USART_putstring(char* StringPtr); ////////////////////////////////PIN_IO_CONTROL////////////////////////////////////////// #define LOW 0 #define HIGH 1 #define INPUT(port,pin) DDR ## port &= ~(1<<pin) #define OUTPUT(port,pin) DDR ## port |= (1<<pin) #define CLEAR(port,pin) PORT ## port &= ~(1<<pin) #define SET(port,pin) PORT ## port |= (1<<pin) #define TOGGLE(port,pin) PORT ## port ^= (1<<pin) #define READ(port,pin) (PIN ## port & (1<<pin)) //////////////////////////////////////////////////////////////////////////////////////// char RX_i = 0; //指令接收指標暫存器
19 sei(); //中斷致能 OUTPUT(B,0); //設定輸出腳位 OUTPUT(B,1); // 設定輸出腳位 OUTPUT(B,2); //設定輸出腳位 OUTPUT(D, 7); // 設定輸出腳位 OCR1A = 470; //設定 Timer1 比較輸出暫存器,做 PWM 工作週期設定用,470 恰為 1.5mS 司服機為中間位置 OCR1B = 470; //設定 Timer1 比較輸出暫存器,做 PWM 工作週期設定用,470 恰 為 1.5mS 主動力馬達為停止狀態 //midd 470 wdt_enable(1000); while(1) { //SET(D,7); wdt_reset(); //TODO:: Please write your application code } } void USART_init(void){ UBRR0H = (uint8_t)(BAUD_PRESCALLER>>8); UBRR0L = (uint8_t)(BAUD_PRESCALLER); UCSR0B = (1<<RXEN0)|(1<<TXEN0)|(1<<RXCIE0); UCSR0C = (1<<UPM01)|(1<<UCSZ01); //參照原廠技術手冊撰寫 } ISR(USART_RX_vect) { char Rxbuf = UDR0; //將接收暫存器放致 Rxbuf,共後續使用 UDR0 = 0; //將接收暫存器清空,避免程式造成不可預期的錯誤 if (Rxbuf == 2) //當接收指標為 2 時設定接收指標為‐開始接收伺服機方向數值 { SET(D,7); RX_i = 1;
} if (Rxbuf == 3) //當接收指標為 3 時設定接收指標為‐開始接收主動力馬達動 力數值 { SET(D,7); RX_i = 2; } if (Rxbuf == 10) //當接收指標為 3 時設定接收指標為‐停止接收 { RX_i = 0; CLEAR(D,7); CLEAR(B,0); } else { if (RX_i == 1 ) //當接收指標暫存器為 1 時,設定伺服機 PWM 工作週期 { OCR1A = Rxbuf * 10; SET(B,0); } if (RX_i == 2 ) //當接收指標暫存器為 2 時,設定主動力馬達 PWM 工作 週期 { OCR1B = (Rxbuf * 10); SET(B,0); } } } //USART 位元資料送副程式 void USART_send( unsigned char data){ while(!(UCSR0A & (1<<UDRE0)));
21 while(*StringPtr != 0x00){ USART_send(*StringPtr); StringPtr++;} } void pwm_setup (void) { ICR1 =1100; TCCR1A |= (1 << COM1A1)|(1 << COM1B1); // set none‐inverting mode TCCR1A |= (1 << WGM11); TCCR1B |= (1 << WGM12)|(1 << WGM13); // set Fast PWM mode using ICR1 as TOP //TCCR1B |= (1 << CS10); TCCR1B|=(1<<WGM13)|(1<<WGM12)|(1<<CS11)|(1<<CS10);
4.2 實驗流程
流程一:找尋空地,將移動式四軸飛行器,置在人身安全距離範圍外,準備開始執 行任務,圖 4-1。 流程二:將移動式四軸飛行器驅動至一樓高(約 4 公尺),圖 4-2。 流程三:將移動式四軸飛行器升至最高(約 8 公尺),圖 4-3。 圖4-1 流程一圖 圖4-4 具中中繼通訊聯 23 圖4-3 流程 聯絡四軸飛 程三 飛行器暨地地輛連結示意意圖
4.3 討論
本來CCD 攝影機是放置在四軸飛行器的最前頭,雖然可以很清楚看見前方目 標物,可是在操作機械手臂的時候,卻看不到姿態,所以後來把CCD 攝影機移到 後方去,就能讓操作者輕易觀察位置做操作。CCD 放置在四軸飛行器臂最前頭的視 景,可以很清楚看見前方欲夾取的盒子,只是車子跟四軸飛行器的姿態都很難看清 楚,操控者不好操作。四軸飛行器維持同樣的姿態,把CCD 放置在後頭,所見的 視點,雖然前方的盒子變比較不清楚,但還可以掌握它的位置,車子週遭的景物跟 機械手臂的姿態能很清楚看見,就能方便操作。設計上如果可以放置兩部CCD 攝 影機,四軸飛行器上的CCD 到了近端就可當輔助用。第五章結論及未來展望
5.1 實驗結論
本文整合的項目相當多元化,從微控制器到馬達及伺服機的控制器,還有感測 器及無線收發模組…等,一方面也是希望能讓很多人能夠馬上看懂並複製延伸,把 這個研究成果再繼續傳承下去,進而推廣我們中繼通訊聯絡四軸飛行器暨地面車輛 之開發方面的研究與發展。 一開始規劃主要目的在設計並製作四軸飛行器與影像無線資料傳輸,不需要事 前規劃臨時以下達指令對外的聯絡,與對外車輛監控工作執行,在面對不同的惡劣 環境及危險性工作,降低人員傷亡,可以擴展工作的範圍並方便移動去執行任務。25 與挫折,所幸最後都能解決,並在其中學習到很多寶貴的知識與經驗。市面上同體 積規格的實驗用飛行器及地面車不但價格高昂,而且性能也不夠理想,基於這幾個 原因,也學習到相當多相關的知識。 實驗一開始使用有線的方式連接控制,後連接WI-FI 先確定各個模組之間都能 依照指令正確的溝通與運作,到後來加入無線的部份,並可以成功地控制它運行, 而且不只有單方面的傳輸控制,還能夠把感測的數據同樣以無線方式回傳到控制端, 達到雙向溝通的控制,這對於四軸飛行器應用在危險環境探勘的用途有很大的幫助, 本文的控制方法與程式流程可以套用到各種需要用到無線控制的專題或是研究上, 如果日後還需要加入更多感測裝置,容量足夠的範圍內,只要多一組的編碼與控制 的副程式,就能馬上增加其功能,對於擴充功能也有很高的便利性。
5.2 實驗討論
本文雖然已經完成當初設定的目標,不過如果有後繼有機會還要再加強 它的功能,還是可以讓它更加的完美,針對要加強的各個部份,提出了以下 的建議方案: (1) 移動式平台:當初的論文研究著重在軟體的設計與硬體的整合,所以對 硬體的性能較不要求,如果以後預算足夠的話,就可以用CNC 製作出金 屬飛行擬器,金屬的抗破壞能力比較強。地面車也能換比現在更高功率 的馬達,不但能提高載重能力,速度也會有所提升。 (2) 平台馬達控制器:研究結束前,控制平台馬達轉速及方向的控制器是 Pololu 公司的 15 伏特直流馬達驅動器,這款控制器有兩個缺點,ㄧ個缺 點是它佔用太多I/O 腳位,控制運轉方向要用掉兩個,控制轉速要用掉一 個,光一個控制器就要用掉3 個 I/O 腳位,地面車左右兩邊各兩個馬達,使用WI-FI 及行動電源。另一個缺點是它的 PWM 訊號無法持續,四軸飛 行器續航力較持久,執行程式才能維持它的運轉,所以說車子在移動的時 候,會受到障礙物及距離的限制,其他的控制動作並無法執行,系統就 不夠完美。針對這兩個問題缺點,可以更換遙控模型汽車專用的速度控 制器,它一樣是用脈波寬度調變的方式來做控制,也就是說,受到衛星 及位置定位,能加強穿透力,更容易控制。 (3) 抬頭顯示器:在後方的 CCD 攝影機是固定的,可以再加入兩個伺服機, 控制攝影機攝影的角度,讓其能上下與左右移動,在控制端方面,可以 加入陀螺儀當做感測器,陀螺儀設計在頭盔裡讓操作者戴上,陀螺儀感 測到X 與 Y 軸的變化馬上經由無線發射模組傳到受控端上,受控端的攝 影機就能跟著操控者飛行器的運動同步動作,讓操控者不必分心再去操 作鏡頭的移動。 (4) 感測器:以後可以依據要使用的場合及功能,再增設感測器,感測器越 多就能獲得越多的情報,讓它可以使用的範圍更廣大,像是衛星定位系 統,就可以回傳機器人的座標,使它能應用在環境的探查方面…等,之 後的改進,就給後來的人視情況去發揮他們的創意了。
27
參考文獻
[1] 經濟部能源局."LED 照明的生理適應"2014 年 2 月 21 日取自 http://energymonthly.tier.org.tw/outdatecontent.asp?ReportIssue=201112&Page=8 。 [2] 郭子菱,呂紹旭,"白光 LED 技術發展演進近況",光連雙月刊,72 期, 2007。 [3] 蘇彥輔, “高功率發光二極體之散熱設計與光衰壽命測試."碩士論文,清 華大學動力機械工程學系,新竹市,2010。 [4] 江松柏, “以模擬軟體進行 LED 散熱鰭片之最佳化"中國機械工程學會 第 二 十 四 屆 全 國 學 術 研 討 會 論 文 集, 中 原 大 學 , 桃 園 , 2007, 11 月 , pp.1209-1211。 [5] 熊世康, “汽車空調舒適性提升之研究", 國立成功大學航空太空工程學 系碩士論文。 [6] 李爵辰, “多孔散熱鰭片熱傳性能之研究", 中原大學機械工程學系碩士 論文。 [7] 黃俊憲,「無線遙控移動式機械手臂於防爆處理的應用」,碩士論文,義 守大學機械與自動化工程學系,2008。[8] Joe.M and Edmar A., “High Density LED Light Engines Bulit Using Low Temperature Co-fired Ceramic on Metal(LTCC-M) Technology,"Conference of the Light Emitting Diodes, 2003。
[9] Takashi Mukai,Motokazu Yamada,Shuji Nakamura, “ Current and Temperature Dependences of Electroluminescence of InGaN-Based UV/Blue/Green Light-Emitting Diodes " Japanese Journal of Applied Physics,vol.37,Part2,Number 11B,1998。
design of a radial heat sink under natural convection" proc. SPIE, Vol. 5530, pp. 119-124, 2004。
[11] B. Pardo, A. Gasse,A. Fargeix, J. Jakovenko, R.J. Werkhoven, X. Perpina, X. Jorda, M. Vellvehi, T. Van Weelden, P. Bancken, “ Thermal resistance investgations on new leadframe-based LED packages and boards, " Microelectronics Reliability,vol.53,issue8,pp.1084-1094,2013。
[12] M.Arik ans S.Weaver, “ Chip Scale Thermal Management of High Brightness LED package,"Proc of SPIE,vol.5530,2004。
[13] NICHI Company“Thermal management design of LEDs", Application Note, LA-KSE3110C, Oct. 31,2003。
[14] Goshayeshi, H.R., Fahiminia, M., and Naserian, M.M., “ Numerical modeling of natural convection on various configuration of rectangular fin arrays on vertical base plates", World Academy of Science, Engineering and Technology, 73,2011。
[15] Naidu, S.V., Rao,V.D., Rao, B.G., Sombabu, A., and Sreenivasulu, B., “Natural convection heat transfer from fin arrays-experimental and theoreticalal study on effect of inclination of base on heat transfer" ,ARPN Journal of Engineering and Applied Sciences, Vol. 5,No. 9,2010。
[16] Azra,k., and Mandrone, C.D., “ Effect of Pin Density of the Thermal Performance of Unshrouded Pin Fin Heat Sink,"Ninth Annual IEEE,1995. [17] Chun-Jen Weng, “Advanced thermal enhancement and management of LED
packages, " International Communications in Heat and Mass Transfer,vol.36,pp. 245-248,March 2009.
29
[19] Jung-Chang Wang, “Thermal module design and analysis of a 230 W LED illumination lamp under three incline angles, " Microelectronics Journal,vol.45, pp.416-423, Apr 2014。
[20] Gashayeshi, H.R., Fahiminia, M., and Naserian, M.M., “Numercial modeling of natural convection on various configuration of rectangular fin arrays on vertical base plates ", World Academy of Science, Engineering and Technology, 73, 2011。
[21] S. Narasimhan and D. Setio, Applied Energy,vol. 69,no.1,pp.29-38,2001. [22] Seung-Hwan Yu, Kwan-Soo Lee, Se-Jin Yook, “Optimum design of a radial
heat sink under natural convection" International Journal of Heat and Mass Transfer, vol.54, pp.2499-2505, 2011。
[23] S.C.Bera,R.V.Singh,V.K.Garg, “Temperature Behavior and Compensation of Light-Enitting Diode,"IEEE Photonics Technol.Lett,pp.2286-2288,2005. [24] M.Shatalove,A.Chitnis,P.Yadav,M.F.Hasan,J.Khan,V.Adivarhan,H.P.M
aruska,W.H.Sun,and M.A.Khan, “Thermal Analysis of Filp-Chip Packaged 280 nm Nitride-Based Deep Ultraviolet Light-Emitting Diodes,"Applied Physics Letters, Vol.86,2005。
[25] Bejan, A., “Optimal Internal Structure of Volumes Cooled by Single Phase Forced and Natural Convection, " ASME Journal of Electronic Packaging,vol.125,pp.200-207。
[26] Ronald L. Liton and Dereje Agonafer, “Coarse and Detailed CFD Modeling of a Finned Heat Sink" IEEE Trans on Components, Packaging, and Manufacturing Technology-Part A,vol.18, no.3, Sep. 1995。
[27] Xi, F., Zhang, D., Xu, Z., and Mechefske, C.M., “A ComparativeStudy on Tripod Units for Machine Tools," International Journal ofMachine Tools & Manufacture, Vol. 43, 2003, pp. 721-730。
[28] Lorenzo Savicco, and Bruno Siciliano, “Modeling and Control ofRobot Manipulators," The McGraw-Hill Companies, Inc., 1996。
[29] Chen, J.S., and Hsu, W.Y., “Design and Analysis of a TripodMachine Tool with an Integrated Cartesian Guiding and MetrologyMechanism," Precision Engineering, Vol. 28, 2004, pp. 46-57。
[30] BhaskarDasgupta, T. S. Mruthyujaya, “The Stewart PlatformManipulator: a review," Mechanism and Machine Theory, 2000, pp15-40.。