國立交通大學
土木工程研究所
碩士論文
以子結構時間序列模型診斷剪力構架之損傷
Damage Diagnosis of a Shear Building via Sub-Structural
Time Series
研究生:林宛臻 指導教授:黃炯憲博士
以子結構時間序列模型診斷剪力構架之損傷
Damage Diagnosis of a Shear Building via Sub-Structural
Time Series
研 究 生:林宛臻 Student:Wan-Chen Lin
指導教授:黃炯憲 博士 Advisor:Dr. Chiung-Shiann Huang
國 立 交 通 大 學 土 木 工 程 學 系 碩 士 班
碩 士 論 文 A Thesis
Submitted to Department of Civil Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Civil Engineering
January 2011
Hsinchu, Taiwan, Republic of China 中華民國一百年一月
以子結構時間序列模型診斷剪力構架之損傷
研究生:林宛臻 指導教授:黃炯憲 博士 國立交通大學土木工程學系碩士班摘要
本研究最主要的目的是提供簡單、有效的研究法方來偵測建築物 哪一層樓的系統特性改變。藉由損傷前後子結構頻率的改變量判斷可 能發生損傷的樓層;透過未損傷構架之子結構之動力反應建立子結構 之 ARX 模型求得預測反應,比較量測反應與預測反應的改變量亦可 判斷損傷之樓層。利用加速度和速度之動力反應建立剪力構架之子結 構 ARX 模型,透過連續小波轉換識別 ARX 模型之系統參數以估算 子結構頻率及阻尼比。數值模擬六層樓剪力構架之地震及微動量測反 應,藉一個或兩個樓層發生不同程度的損傷驗證本研究方法之可行 性,並探討含雜訊的影響。經模擬結果證明相較於 COMAC 及 FRFCM,使用本研究之評估方法較能準確診斷系統參數改變的情 形。將本研究方法應用至五層樓鋼構架之震動台試驗,皆能準確地判 別三種構架系統特性差異的樓層。Damage Diagnosis of a Shear Building via Sub-Structural
Time Series
Student:Wan-Chen Lin Advisor:Dr. Chiung-Shiann Huang Department of Civil Engineering National Chiao-Tung University
Abstract
The main purpose of this work is to propose simple and efficient approaches to locate the stories whose properties may change in a building. The stories that are possibly damaged are determined by comparing natural frequencies of sub-structures in different stages (undamaged and damaged stages). The damaged stories can be also located by comparing the differences between the measured sub-structural responses and the responses predicted by the ARX model constructed using the dynamic responses of an undamaged building. ARX models for sub-structures of a shear building are established from sub-structural dynamic responses in term of one of acceleration and velocity. The parameters of an ARX model are identified through the continuous wavelet transform, and natural frequencies and damping ratios of sub-structures can be estimated directly through the identified parameters. The validity of the proposed procedure is confirmed using numerically simulated earthquake responses and ambient vibration responses of a six-story shear building having one-site or two-site damages with different levels. The effect of noise on the accuracy of the proposed approach is also investigated. It is also demonstrated that the proposed approach is superior to COMAC and a frequency response function curvature method in locating damaged stories. The proposed procedure is further applied to process the dynamic responses of three five-story steel frames, which are certainly not shear buildings, from shaking table test. The stories with different material properties in three frames are accurately located.
誌謝
承蒙指導教授 黃炯憲博士在研究期間悉心指導,本文才得以順 利完成。老師對於學術研究之嚴謹與執著令人佩服,在此僅致最高之 敬意及由衷的感謝。 論文口試期間,承蒙 洪士林教授與鄭復平副教授百忙之中蒞臨 指導,並提供許多寶貴的意見與指正,使本文能更臻完善,特此感謝。 感謝威智學長、明儒學長、存峰學長、志偉學長、政寧學長、靖 俞學長、政淵學長、榕師學長的照顧與關心。感謝學弟妹中原、鈞誠、 維莘、博然在口試期間的幫忙。論文研究及撰寫期間,特別感謝威智 學長不厭其煩的教導,在研究上給予極大的幫助。感謝大學及研究所 同窗好友嬿糧的陪伴。感謝最可愛的室友阿烈、立珺、芸臻、耀萱、 娸娸以及多年摯友綱威給我的精神支持。 最後,感謝我的家人和志儒,你們的支持給予我力量繼續往前邁 進,願一切的喜樂都能與你們分享。目錄
摘要...i Abstract...ii 誌謝... iii 目錄...iv 表目錄...vi 圖目錄...vii 第一章 緒論...1 1.1 研究動機與目的 ...1 1.2 文獻回顧 ...2 1.3 論文架構 ...7 第二章 利用連續小波轉換於線性系統識別...8 2.1 前言 ...8 2.2 連續小波轉換之簡介 ...8 2.3 動態特性之識別程序 ...11 2.3.2 結構系統動態特性估算...14 2.3.3 利用 Meyer 小波進行識別 ...15 2.3.4 系統損壞指標...16 2.4 子結構系統識別 ...18 2.5 隨機遞減訊號與自由衰減振動反應 ...23 2.5.1 隨機遞減之步驟...23 2.5.2 隨機遞減法之數學基礎...24 第三章 數值模擬驗證...27 3.1 前言 ...27 3.2 模型概述 ...27 3.3 利用模態參數之損傷評估–以地震反應為例 ...28 3.3.1 整體動態識別...28 3.3.2 局部識別結果及損傷診斷...30 3.3.3 比較不同損傷評估...32 3.3.4 雜訊之影響...33 3.3.5 雜訊之處理...35 3.4 利用模態參數之損傷評估–以微動量測反應為例 ...38 3.4.1 整體動態識別...38 3.4.2 局部識別及損傷診斷...393.5 利用預測誤差之損傷評估 ...40 3.5.1 預測誤差...40 3.5.2 損傷診斷...41 3.5.3 雜訊之影響...42 3.5.3 雜訊之處理...46 第四章 應用於震動台試驗...50 4.1 五層樓鋼構架振動台試驗 ...50 4.1.1 待測結構物介紹...50 4.1.2 輸入之地震力...51 4.2 利用模態參數診斷系統參數之改變 ...51 4.2.1 整體動態識別...52 4.2.2 局部識別...53 4.3 利用預測誤差診斷系統參數之改變 ...56 第五章 結論與建議...58 5.1 結論 ...58 5.2 建議 ...59 參考文獻...169
表目錄
表2.1 第 n-1 子結構之系統參數 ...60 表2.2 第二子結構之系統參數...61 表3.1 結構損傷案例...62 表3.2 六層樓剪力建築之系統動態特性之識別結果...63 表3.3 六層樓剪力建築之系統動態特性之理論值...64 表3.4 MAC 值 ...65 表3.5 子結構之理論值...66 表3.6 六層樓剪力建築之子結構識別結果(NSR=0%) ...67 表3.7 COMAC 及 FRFCM 值 ...68 表3.8 六層樓剪力建築之子結構識別結果(NSR=5%) ...69 表3.9 六層樓剪力建築之子結構識別結果(NSR=20%) ...70 表3.10 除噪之子結構識別結果(NSR=5%) ...71 表3.11 除噪之子結構識別結果(NSR=20%)...72 表3.12 微動反應之整體識別...73 表3.13 微動反應動態參數之 MAC 值 ...74 表3.14 微動反應之子結構識別結果...75 表3.15 COMAC 與 FRFCM 損傷指標...76 表4.1 桿件斷面...77 表4.2 不同性質鋼構架之模態參數...78 表4.3 MAC 值 ...79 表4.4 局部識別...80圖目錄
圖2.1 小波函數...81 圖2.2 多層剪力建築...82 圖2.3 隨機遞減曲線...83 圖3.1 六層樓剪力建築...84 圖3.2 集集地震輸入之歷時圖及傅氏譜...85 圖3.3 各自由度之加速度反應歷時圖...86 圖3.4 各自由度之傅氏譜...87 圖3.5 無勁度折減之子結構識別結果(NSR=0%) ...88 圖3.6 Case 1 之子結構識別結果(NSR=0%)...89 圖3.7 Case 3 之子結構識別結果(NSR=0%)...90 圖3.8 Case 4 之子結構識別結果(NSR=0%)...91 圖3.9 Case 7 之子結構識別結果(NSR=0%)...92 圖3.10 Case 8 之子結構識別結果(NSR=0%)...93 圖3.11 損傷評估方法之比較...94 圖3.12 地震輸入歷時圖及其傅氏譜(NSR=5%) ...95 圖3.13 各樓層反應之歷時圖(NSR=5%) ...96 圖3.14 各樓層反應之傅氏譜(NSR=5%) ...97 圖3.15 標準構架之子結構識別結果(NSR=5%) ...98 圖3.16 Case 1 之子結構識別結果(NSR=5%)...99 圖3.17 Case 3 之子結構識別結果(NSR=5%)...100 圖3.18 Case 4 之子結構識別結果(NSR=5%)...101 圖3.19 Case 7 之子結構識別結果(NSR=5%)...102 圖3.20 Case 8 之子結構識別結果(NSR=5%)...103 圖3.21 地震輸入歷時圖及其傅氏譜(NSR=20%) ...104 圖3.22 各樓層反應之歷時圖(NSR=20%) ...105 圖3.23 各樓層反應之傅氏譜(NSR=20%) ...106 圖3.24 無勁度折減之局部識別結果(NSR=20%) ...107 圖3.25 Case 1 之局部識別結果(NSR=20%)...108 圖3.26 Case 3 之局部識別結果(NSR=20%)...109 圖3.27 Case 4 之局部識別結果(NSR=20%)...110 圖3.28 Case 7 之局部識別結果(NSR=20%)... 111圖3.29 Case 8 之局部識別結果(NSR=20%)...112 圖3.30 除噪各樓層反應之歷時圖(NSR=5%) ...113 圖3.31 除噪後各樓層反應之傅氏譜(NSR=5%) ...114 圖3.32 除噪後無勁度折減之局部識別結果(NSR=5%) ...115 圖3.33 Case 1 除噪後之局部識別結果(NSR=5%)...116 圖3.34 Case 3 除噪後之局部識別結果(NSR=5%)...117 圖3.35 Case 4 除噪後之局部識別結果(NSR=5%)...118 圖3.36 Case 7 除噪後之局部識別結果(NSR=5%)...119 圖3.37 Case 8 除噪後之局部識別結果(NSR=5%)...120 圖3.38 除噪各樓層反應之歷時圖(NSR=20%) ...121 圖3.39 除噪後各樓層反應之傅氏譜(NSR=20%) ...122 圖3.40 標準構架除噪後之局部識別結果(NSR=20%) ...123 圖3.41 Case 1 除噪後之局部識別結果(NSR=20%)...124 圖3.42 Case 3 除噪後之局部識別結果(NSR=20%)...125 圖3.43 Case 4 除噪後之局部識別結果(NSR=20%)...126 圖3.44 Case 7 除噪後之局部識別結果(NSR=20%)...127 圖3.45 Case 8 除噪後之局部識別結果(NSR=20%)...128 圖3.46 隨機遞減速度曲線(標準構架)...129 圖3.47 Case 1 隨機遞減速度曲線...130 圖3.48 Case 2 隨機遞減速度曲線...131 圖3.49 Case 3 隨機遞減速度曲線...132 圖3.50 Case 4 隨機遞減速度曲線...133 圖3.51 Case 5 隨機遞減速度曲線...134 圖3.52 Case 6 隨機遞減速度曲線...135 圖3.53 Case 7 隨機遞減速度曲線...136 圖3.54 Case 8 隨機遞減速度曲線...137
圖3.55 Case 1~Case 8 之NPE值(NSR=0%) ...138
圖3.56 Case 1~Case 8 之NPE值(NSR=5%) ...139
圖3.57 輸入歷時圖與傅氏譜(NSR=10%) ...140
圖3.58 各樓層反應之歷時圖(NSR=10%) ...141
圖3.59 各樓層反應之傅氏譜(NSR=10%) ...142
圖3.60 Case 1~Case 8 之NPE值(NSR=10%) ...143
圖3.61 Case 1~Case 8 之NPE值(NSR=20%) ...144
圖3.63 除噪各樓層反應之歷時圖(NSR=10%) ...146
圖3.64 除噪後各樓層反應之傅氏譜(NSR=10%) ...147
圖3.65 除噪後Case 1~Case 8 之NPE值(NSR=10%) ...148
圖3.66 除噪後Case 1~Case 8 之NPE值(NSR=20%) ...149
圖4.1 國家地震工程研究中心之五層樓鋼構架...150
圖4.2 五層樓鋼構架立體圖...151
圖4.3 五層頭鋼構架俯視圖及立面圖...152
圖4.4 三種型態之鋼構架(a) std構架 (b) add_m構架(c) add_k構架...153
圖4.5 20%之EL Centro地震輸入之歷時圖及傅氏譜...154 圖4.6 10%與 60%Kobe地震下最底層柱之應變歷時圖 ...155 圖4.7 60% Kobe地震輸入之歷時圖及傅氏譜...156 圖4.8 “std"構架各樓層之反應歷時圖 ...157 圖4.9 “add_m"構架各樓層之反應歷時圖...158 圖4.10 “add_k"構架各樓層之反應歷時圖...159 圖4.11“std_yield"構架各樓層之反應歷時圖 ...160 圖4.12 “std"構架各樓層之傅氏譜 ...161 圖4.13 “add_m"構架各樓層之傅氏譜...162 圖4.14 “add_k"構架各樓層之傅氏譜...163 圖4.15 “std_yield"構架各樓層之傅氏譜 ...164 圖4.16 “std"構架及“add_k"構架之第三模態 ...165 圖4.17 五樓之頻率響應函數...166 圖4.18 損傷評估方法之比較圖...167 圖4.19 不同型態鋼構架之NPE值 ...168
第一章
緒論
1.1 研究動機與目的
隨著都市快速發展和科學的進步,越來越多的高樓大廈林立及超 高建築物興建,而人類的活動都在這些建築物內。建築物經年累月受 地震危害,加上結構施工的品質控管不良或維護工作不確實,天災發 生時往往無法發揮抵禦的功能。 我國大部分的基礎建設皆於五六十年代所建造的,經過數十年的 使用,建築物逐漸老化,或許外觀並沒有巨大的變化,但結構可能已 經產生局部破壞。尤其台灣位處地震頻繁的地震帶,地震對我們的威 脅不會停止,震後建築物之動力特性是否受到影響,人們所居住及活 動的建築物能否抵擋一次又一次的強震;倘若再受到大規模的地震, 結構物極可能產生破壞、倒塌的情形,甚者危害到人們的生命與財 產。結構物的興建是一項龐大複雜且耗費資源的工作,若能及時發現 受損情況加以修復,亦可大幅降低人命的傷亡。 結構損傷診斷方法的發展起源於軍事、航空以及機械領域,近二 十年逐漸擴展到其他領域,近期於建築土木工程的領域亦有逐漸增加 之趨勢。結構物受到劇烈的衝擊或強大的地震都可能造成其內部材料 嚴重受損而產生破壞,Rytter [1]將結構物的健康診斷分為四個階段:第一階段﹕檢測破壞的存在。 第二階段﹕損傷位置的判別。 第三階段﹕損傷程度之評估。 第四階段﹕預測該結構剩餘可使用的年限。 Chang et al. [2]依監測或量測方法可分為全域健康監測及局部健 康監測,本研究即使用全域監測量測建築物地震反應,發展一套可靠 的檢測方法,診斷建築物損傷的樓層。希望在樓層勁度減少10%時, 即可準確判斷出損傷樓層。本研究將一剪力構架分成以兩層或三層為 一單位之子結構,利用該子結構之動態反應建立一子結構 ARX 模 式,透過連續小波轉換識別該模式之係數,估算該子結構之自然振動 頻率。當該子結構有損傷時,其自然振動頻率會改變。為保障結構物 的安全性,以及延長建築物的使用壽命,適時且及時地進行檢測和監 測是必要的。
1.2 文獻回顧
Natke [3]在 1988 年文獻回顧的文章,除了針對各種有限元素模 型修正之方法作簡略的介紹外,並探討如何由量測之輸出及輸入反應 應用於頻域的分析模型修正。Imregun 和 Visser [4]回顧現有的分析模 型修正技術文獻,說明各種模型修正方法潛在的問題點,並建議未來調查提供關於模型修正的知識。Salawu [6]針對應用頻率進行損傷識 別,指出透過長期的監測與定期的振動量測,可有效地由頻率的變化 得知結構是否有損傷存在。Doebling et al. [7]針對利用振動參數的各
種損傷識別法作了一系列介紹。從 Doebling et al. [7]、Farra et al. [8]、
Chang et al. [2]、Brownjohn [9]文獻回顧的文章,可知利用全域監測反 應進行結構損傷評估之方法大致可分為兩大類:(一)模式修正理論 (model updating),(二)損傷指標方法(damage index method)。
使用模式修正理論,一般是與有限元素模式結合,透過最優化法 尋找最能符合現況結構反應之有限元素模式,再與損傷前之有限元素 模式比較,評估有無損傷及損傷於何處,甚者損傷程度。此類方法可 再蓋分為三小類 [10]:(i)直接修正法(direct updating methods):透過 吻合現況結構之自然振動頻率與振形,直接(不需迭代)修正質量或勁
度矩陣。如 Berman 和 Nagy [11]所提解析模式改良流程(analytical
model improvement procedure),Caesar 和 Peter [12]的直接矩陣修正法 (direct matrix update method),Kammer [13]的投影矩陣法,Kenigsbuch
和 Halevi [14] 的 一 般 參 考 基 底 法 (generalized reference basis
approach),Chang et al. [15]的類神經網路法;(ii)參數修正法:為迭代 修正質量或勁度矩陣之方法(parameter updating methods)。如 Minas and Inman [16],Zimmerman and Kaouk [17],與 James et al. [18]使用
不同指定特徵結構技巧,Adelman 和 Haftka [19]與 Alvin [20]則提出
不同之敏感度法,Beck 和 Katafygiotis [21]的 Bayesian statistical
approach;(iii)使用頻率域數據之模式修正法(model updating methods using the frequency domain data):Friswell 和 Penny [22]與 Arora et al. [23]使用頻率反應函數。使用模式修正理論進行評估,分析上比較複 雜,因其必需建立無損傷及有損傷之結構有限元素模式。另外,由於 量測之不完整、雜訊之存在或識別模態參數之不完整及誤差,導致較 難使用此類方法進行實際結構物之損傷評估。 損傷指標方法目的於判斷結構物是否損傷以及判別損傷位置。建 立指標參考之依據可類分為 (a)使用自然振動頻率:1979 年 Cawley 和Adams [24]利用自然振動頻率結合有限元素法來分析裂縫位置,由
實驗測得自然振動頻率來計算裂縫大小;Hearn 和 Tesla [25]與 Friswell
et al. [26]研究自然頻率之變化作為偵測梁裂縫之非破壞檢測之方
法,Messinaet et al. [27]提出不同方法。由於自然振動頻率為結構系統
之整體特性參數,對局部損傷不敏感,且高模態自然振動頻率不易識
別,因此單依據模態頻率無法準確判斷結構物損壤的位置。Zapico 和
Gonzalez [28]與 Jeyasehar 和 Sumangala [29]則透過類神經網路識別損 傷區域與程度。(b)使用振動模態:許多學者試圖建立以振態為基礎 的損傷指標。Allemang 和 Brown [30]提出模態確認指標(Modal
Assurance Criterion, MAC)判斷系統是否損傷;Lieven 和 Ewins [31]
提 出 座 標 模 態 確 認 準 則(Coordinate Modal Assurance Criterion,
COMAC)判別損傷位置; Chen 和 Garba [32]提出將結構損傷前後之 模態應變能(Modal Strain Energy, MSE)應用於結構損傷診斷;Stubbs
和Kim [33]驗證以應變能判別破壞前後損傷位置之正確性,Hu et al.
[34]以應變能之準確解成功地預測複合材料疊層板上表面裂縫之位 置改變判斷結構損傷位置;Law et al. [35]提出 Elemental Energy Quotient(EEQ),利用元素的應變能之改變判斷結構損傷位置;Hsu and Loh [36]提出修正模態應變能(modified Modal Strain Energy Change, M-MSEC)。若欲求得 MSE,EEQ 及 M-MSEC 惟有先估算結構之勁
度矩陣,但實際上要求得真實結構的勁度有其困難度。雖然 MAC 可 用來檢視結構有無損傷,但無法判斷損傷於何處。雖然振型或者振型 的曲率對局部損傷之敏感度較自然振動頻率高,但其於高模態不易識 別,精度亦較自然振動頻率差,故於實際應用之可靠度尚待評估。(c) 使用自然振動頻率與模態: Lin [37]提出建構柔度矩陣、Pandey 和 Biawas [38]使用損傷前後之結構柔度矩陣法判別結構損傷位置。(d) 使用其他:Szewezyk 和 Hajela [39]利用類神經網路連結靜態位移與 桿件勁度之關係;Sampaio et al. [40]使用損傷前後的頻率響應函數曲 率(frequency response function curvature method, FRFCM)之絕對誤
差判斷損傷位置;Sohn 和 Law[41]則使用 experimental Ritz vector; Bernal [42]使用 load vector;Huang et al. [43]利用類神經網路建構類似 NARX 模式,萃取模態參數判斷建築物是否損傷,再利用類神經網路 預估反應與量測之差值,判斷建築物損傷於哪一樓層;Liu et al. [44] 則利用頻率反應函數之形狀。 Koh et al. [45]提出在時間域利用子結構的方法,將整體結構切割 成多個子結構,透過擴展之卡式過濾器以識別局部之勁度與阻尼比。 Zhao et al. [46]有鑑於多自由度的大量計算,在頻率域建構子結構系統
並估算局部之勁度及阻尼。Yun and Bahng [47]採用子結構法來減少待
識別參數數量,建構類神經網路模型,在預先判斷可能損傷的範圍, 對該子結構進行識別損傷。Yang and Huang[48]考量實際感測計數量 之限制,提出“sequential nonlinear least-square estimation method"估 算未知的輸入及輸出,以子結構的方法識別結構損傷的位置。 本研究建立子結構 ARX 模型,轉換至小波域中估算該模態之參 數。本研究數值模擬一六層樓剪力屋架,首先以地震反應為輸入,對 數個各損傷案例進行識別,並比較使用子結構頻率與其他損傷指標的 效果。加入 5%、10%,及 20%之雜訊,視其對識別頻率有何影響。 再使用本研究提供之除噪方法,提昇識別結果。另外,處理微振量測 反應,對各損傷案例進行分析,探討不同環境下使用模態參數作為健
康診斷之工具。本研究另提出使用預測誤差對地震反應進行結構損傷 之診斷,並比較除噪前後的差異。最後應用於五層樓鋼構架之振動台 試驗,使用模態參數對不同型態之鋼構架進行識別,比較使用子結構 頻率與其他損傷指標的效果,另使用預測誤差判斷各型態鋼構架系統 改變之樓層。
1.3 論文架構
本論文共分為五章,其組織內容概述如下: 第一章 緒論。主要內容為研究動機與目的及文獻介紹。 第二章 利用連續小波轉換於線性系統識別。內容包含連續小波轉換 之理論基礎簡介,子結構 ARX 模式之建立與如何應用連續 小波轉換於子結構系統之動態特性識別。 第三章 利用結構模態參數與預測誤差做為損傷評估。探討數值地震 與微振動量測之識別結果,另外亦考慮噪訊之影響及透過除 噪後改善的效果。比較不同損傷評估方法用於結構健康診斷 的效果。 第四章 將本研究之識別方法應用於五層樓鋼構架之振動台試驗數據 分析。 第五章 結論與建議。總結此研究之分析結果。第二章
利用連續小波轉換於線性系統識別
2.1 前言
本章主要是介紹本研究所使用之線性系統之模態識別方法;此方 法主要是透過連續小波轉換,將量測之訊號轉換至小波域中;在小波 域中利用最小平方差法架構所量測系統之 ARX 模型,再進一步估算 系統模態。2.2 節介紹連續小波轉換之理論基礎。2.3 節則介紹識別流 程,將 ARX 模型轉換至小波域,並於小波域中架構 ARX 模型,利 用ARX 模型估算動態參數。2.4 介紹子結構運用於剪力建築物之識別 方法。2.5 節介紹利用隨機遞減法將微動反應轉換至自由衰減反應, 再利用連續小波結合ARX 模型識別出該結構系統的動態特性。2.2 連續小波轉換之簡介
小波轉換為近年來熱門的研究主題,目前已廣泛地應用於信號處 理、通信系統等不同研究的領域,其中最常使用於影像壓縮與資料壓 縮等,取代了傳統之Fourier 轉換。小波分析的起源於 1981 年法國地 球物理學 Morle[49]在分析地震波的局部性質時,發現傳統的傅立葉 轉換有其不足之處;因此提出與傅立葉轉換相似的小波概念於信號分 析。小波轉換保留了傅立葉轉換的優點;因此,小波轉換可視為傅立葉轉換之改良。任一函數 f t
,其連續小波轉換定義如下[50] L2
, 1 , ( ) f R a b t b W a b f t dt f a a ,
, (2.1) 其中,( )t 為母小波函數(mother wavelet),( )t 為 之共軛函 數; 為小波函數,乃經由母小波函數 ( )t a b, ( )t 伸縮和平移所形成,定 義為 ( , ) 1 ( ) ( ) a b t b t a a , (2.2)a 與 b 分別為尺度因子(Sacling Factor)與平移因子(Translation Factor)。 小波轉換之逆轉換定義為
2
1 1 , f t b f t W a b dadb C a a
, (2.3) 其中 2 ˆ R C d
, (2.4) ˆ ( ) 為 之傅立葉轉換。小波轉換之母小波函數有多種選擇,但必 須符合兩條件:一為小波函數必須為平方可積(Square Integrable)或函 數具有有限能量;二為小波函數及其各階倒數在 處急遽下降收 斂至零,即為有限支撐長度。 ( )t t 母小波函數 在時間域可視為中心為 ,寬度為 2 之窗函數; 及 之定義分別為:
t t t 2 2 1 ( ) t t t
dt, (2.5)
1 2 2 2 1 ( ) t t t dt
, (2.6) 其中 2 ( )t dt
2 。依以上定義式(2.2)小波函數a,b
t 之中心為 ,半徑為 ;即表示小波函數於時間域上的視窗範圍為: at b a , (2.7)
bata,bata
類似於式(2.5)及(2.6)之定義,母小波函數
t 在頻率域亦可 視為中心為及半徑為 之窗函數,其中 ˆ
2 2 1 * | || || | d
, (2.8)
12 2 2 1 ( *) | | || || d
, (2.9) 依式(2.2)之傅立葉轉換,可得 ,
1 ˆ ˆ 2 2 ib a b a e a a
。 (2.10) 若對式(2.1)進行傅立葉轉換,可得
a a f a Wˆf ( , ) ˆ ˆ , (2.11) 其中 代表 之傅立葉轉換。根據上式可定義小波函數 於頻率域之視窗範圍為[50]: ) , ( ˆ a Wf
t
a b Wf ,
b a, a a a a ˆ , ˆ , (2.12) 此小波函數的頻率中心為 a,寬度為2ˆ a。 整合上述結果,利用式(2.1)做小波轉換,其提供一時間頻率窗:
bata,bata
a a a a ˆ , ˆ , (2.13)
a 變動而改變。當a 值大時,時間視窗較寬而頻率視窗變窄,適合分析低頻信號; 而當a 值小時,時間視窗較窄而頻率視窗寬,適合偵測高頻現象,所 以能偵測出極高頻率訊號發生得時間。因此小波函數
t 實際是一個 帶通濾波器,其隨伸縮因子 a 之變動, t)即對應不同的視窗中 心及視窗半徑。 , ( a b 依小波轉換之定義,可證明連續小波轉換具有以下重要性質[51]: 1. 線性:一個多分量信號之小波轉換等於各分量小波轉換之和。 2. 自相似性:對應不同尺度參數 a 和不同平移參數 b 之連續小波轉 換之間是自相似。 3. 平移不變性:若 f
t 之小波轉換為Wf
a,b ,則 f
t
之小波轉換 為Wf
a,b
。 4. 伸縮共變性:若 f
t 之小波轉換為Wf
a,b ,則 f
ct 之小波轉換為
ca cb
c W f , ,其中c0。2.3 動態特性之識別程序
由於結構系統通常很龐大,由於量測經費之限制上,實際量測通 常無法得到系統所有自由度的反應,只能量測到部分加速度與速度的 反應。在線性系統中,可將量測自由度(或測站)間之反應表示成[52] , (2.14)
t
t i t
J
j I i i
Θ y Φ y 0 1
t j t jf 其中y
t 為量測動力反應歷時向量(位移、速度、或加速度);以下假設該向量亦有 n 個分量);f
t j Θ 為系統外力向量歷時; 與 待定係 數矩陣, 為量測反應之取樣時間間隔;I 及 J 為輸入輸出之延時。 以上之離散化運動方程式與多變數 ARX 之時間序列模型十分相似, 式(2.12)為不考慮雜訊(或誤差)之 ARX 模式。 i Φ Θj Φ t 依Huang[53]及林[54]之經驗,當量測自由度比系統自由度少很多 或有雜訊時,需用很大之I 及 J 方能得到較準確之離散化運動方程。 但當採用很大之I 及 J,於利用最小平方差估算式(2.14)中之 與 時,常會造成數值困難。另外,採用越大之 I 會造成越多之虛假模態, 增加判斷真正系統模態之困難度。因此,若將式(2.14)進行小波轉 換,於小波空間估算 與 ;如此,某程度上地降低該數值困難; 且可順便進行濾波,以較小之I 及 J 進行估算。 i Θj i Φ 將式(2.14)依式(2.1)做小波轉換,可將式(2.14)表示成
a b
W
b i t
J
W
a b j j j I i i
, , 1 1 f y Φ Θ a
t a, y W , (2.15) 式(2.15)可視為小波域中之 ARX 模式。傳統時域下之 ARX 模式僅可 藉由調整模型項數 以求得最適當之模型;而小波域下之ARX 模 式除了透過模型項數之外,可藉由選擇適當之小波函數與調整伸縮因 子 以獲得適當之模型。 ) , ( JI 在建立式(2.15)時,可利用連續小波轉換之平移不變性;計算y
t 與f
t 之小波轉換,可同時得y
tit
與f
t jt
之小波轉換函數。依小波轉換之特性,於式(2.15)中取不同之 a 值,代表取某一頻率窗 內之反應建立ARX 模式,即同時對反應或輸入力進行適當濾波。 為了簡化表示式,
Wy
a,bit
與
Wf
a,b jt
分別記為yW
a,b i
與fW
a,b j
。取特定之a 與不同之b建構式(2.15),可整理得
F Y C Y0 , (2.16) 其中,
T
T
I T
T;
Y Y Y Y 1 2 F
F 0 T
F 1 T
F J T
T,
Yi
yW
a,maxi
yW
a,maxi1
yW
a,maxiM
,
C Φ1 Φ2 ΦI Θ0 Θ1 ΘJ
,
I,J max max ,
F i 之定義類似
Y i 。 若欲分析較廣頻率區域內之量測反應,可同時取數個a 值,則 Y 矩陣 則可改寫為:
a i
a i
a i M
M i a i a i a M i a i a i a M i a i a i a Y N W N W N W W W W W W W W W W i max , 1 max , max , max , 1 max , max , max , 1 max , max , max , 1 max , max , 3 3 3 2 2 2 1 1 1 y y y y y y y y y y y y , (2.17) 而
F i
之定義亦類似
Y i
;式(2.14)中
C 之最小二乘方解為
F Y Y C 0 , (2.18) 其中“+”代表廣義逆矩陣。 小波轉換應用於不同領域,其伸縮因子通常有不同的選擇。但是應用於結構系統之模態識別上仍然有其脈絡可尋。以連續小波轉換進 行分析,將可針對吾人感興趣之頻率區間選擇適當的伸縮因子。若
ˆ 代表母小波函數 傅立葉轉換之振幅,可根據此振福函數定 出小波函數於之集中頻帶(
t U L f f f );對任意a 值小波函數
t b
a 之傅立葉轉換之振幅為 aˆ
a ,而其頻率集中區間則為 。 由此可知,a 值同時也決定了小波函數能量集中之頻率區間,則可由 吾人感興趣之頻帶決定出適當之a 值。此外,連續小波轉換中之平移 因子 b U L af f f R ,處理離散資料時,可取bbt b 0,1,2,M。因此,應 用於式(2.15)中之y
tit
與f
t jt
之小波轉換將可利用平移不變性 獲得。2.3.2 結構系統動態特性估算
利用 ARX 模型來描述結構系統之動力反應,可進一步識別結構 系統之動態特性。結構系統之動態特性是指自然振動頻率、模態阻尼 比以及振形。欲估算此動態特性,依式(2.14)知其決定於係數矩陣 。依黃[52]之推導知,若從 建構矩陣 i Φ
i1,2I
Φi
1 Φ 2 Φ 3 Φ1 Φ Φ I 0 0 0 0 0 0 I 0 0 0 0 0 I 0 G I I I I , (2.19) 其中,
0
與
I
分別代表維度為Nd Nd之零矩陣與單位矩陣,Nd 為量測自由度。 之特徵值及特徵向量相關於該結構系統之動態特性。 令
G k ib k k a ,
G 之第k 特徵值,則該結構系統之第 k 模態自然振動 頻率k及模態阻尼比k為 2 2 k k k ; k k k , (2.20) 其中 ln a
k2b2
t 2 1 k k ; 1 tan 1 k k k t k k k i 。 令g 為
G 之第 振形,將k g 表示成
I 2 1 k g , (2.21)
G 之特殊結構,可證明 其中
含Nd個分量。由於
i k
i1, (2.22) 即不同之i,
i彼此間互相平行,故任一
i均對應於結構系統之第 k 模態之振形。2.3.3 利用Meyer小波進行識別
小波分析方法與傳統傅立葉轉換相較之下更顯優越,傅立葉轉換所用到的函數只有sin( )t 、cos( )t 或exp( )t ,具有唯一性;小波分析
可藉由選擇適當之尺度因子以對有興趣之頻帶進行分析,然而選擇小 波函數通常是透過經驗及不同試驗比照分析而來,因此也成為研究的
表示式,且具有很類似帶通濾波器(band-pass filter)之特性。Meyer 母小波函數M( )t 如圖 2.1a 所示,其定義於頻率域,表示式為: 3 8 , 3 2 0 3 8 3 4 1 4 3 2 cos 2 3 4 3 2 1 2 3 2 sin 2 ˆ 12 2 2 2 1 v e v e i i M , (2.23) 其中,v
s 為構造Meyer 小波之輔助函數:
s s4
3584s70s2 20s3
s
0,1 v , (2.24)
ˆM 之各頻率分量如圖2.1b 所示,為有限支撐長度之正交小波。因 此,配合此小波函數之“主要頻率保留區間",即可決定出適當之a 值。 由式(2.23)顯示,ˆM
在2 3 8 3之區間才有值。若定 義頻率分量為最大者之 90%以上之頻率區間為“主要頻率保留區 間",由式(2.23)可得此範圍為
0.5348, 0.9311
。因此,
t b
a 的” 主要頻率保留區間”範圍為
0.5348 , 0.9311a a
。因此,除非選擇 a 值 所對應之”主要頻率保留區間” 含蓋欲識別之振動頻率,否則將難以 獲取準確之結果。2.3.4 系統損壞指標
傳統上,模態改變常用於判別系統是否損傷;其中最常用者為 iT T iT iI T iI iT T iI iT iI MAC 2 , , (2.25) 其中
iI 與
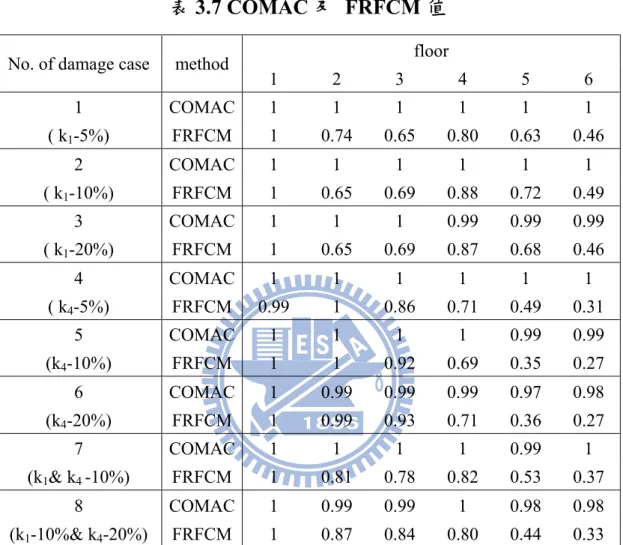
iT 分別為識別與理論之第i模態。由以上之定義式可看 出,當兩模態完全一致時,MAC=1。但當兩模態差異甚大時,則 MAC 值越接近於0。模態座標確認準則COMAC 是 1988 年由 Lieven and Ewins[31]兩
位學者針對 MAC 指標提出進一步的應用,將座標位置引用至指標 中,藉由計算各振型間相關位置的總合差異量,達到損傷定位能力。 COMAC 值是比較特定自由度之識別模態與理論模態之吻合程度,其 定義如下: 2 , , 1 2 2 , , 1 1 ( ) ( ) ( ) ( ( )) ( ( )) J I j T j j J J I j T j j j i i COMAC i i i
, (2.26) 其中J 是總模態數, i 是自由度,I j, ( )i 為第 j 模態於第 i 自由度所識 別之值,T j, ( )i 為第 j 模態於第 i 自由度之理論值。由以上定義可知 COMAC=1 時,表示理論與識別在第 i 自由度之所有模態完全一致。 反之兩者於第i 自由度之所有模態越不吻合則 COMAC 愈趨近於 0。頻 率 響 應 函 數 曲 率 (Frequency Response Function Curvature
Method, FRFCM)延續了 Pandey 等人[38]的評估方法,利用 FRF 資 料求得每一頻率之曲率,藉由損傷前與損傷後曲率的絕對誤差,診斷 結構損傷的位置,其定義如下﹕
1, 2 , 1, 2 , i j i j i j i j c h , (2.27) o i j, d i j FRFCM i c c
, , (2.28) 其中,j 為外力輸入的位置, i j, 為第 i 自由度之頻率響應函數; 與 分別為損傷前與損傷後之頻率響應函數曲率,FRFCM 值愈大表示損傷的情形愈重大。最高自由度及最低自由度於式(2.27) 分別不存在 及 。 , o i j c cd i j, i1,j i1,j2.4 子結構系統識別
本研究以一多層剪力建築之運動方程式可表示為:
t
t
t
Mx Cx Kx F t , (2.29) 其中 , , 為結構系統之質量,阻尼和勁度參數;F 為外力 向量,x 為位移向量。此剪力屋架可簡化如圖 2.2 之離散系統。將 , 表示成 M C K K C
1 1 1 1 2 3 2 2 2 2 1 0 0 n n n n n n n n n k k k k k k k k k k k k k k k K ,
( 1) ( 1) ( 1)( 1) ( 1)( 2) ( 1)( 2) ( 2)( 2) 22 21 21 11 0 0 nn n n n n n n n n n n n n c c c c c c c c c c c C , 參考圖 2.2,從多層樓剪力結構物分割出子結構系統,考慮由第 j-1、j、j+1 自由度所構成之第 j 子結構,則其運動方程式可表示為:
1
( 1) 1
( 1) 1
1 1
1
j j jj j j j j j j j j j j j j j j j g mx t c x t kk x t c x t c x t k x t k x t mx t
, (2.30) 利用中央差分,
1 2 2 i i i t t t t t x x x x i1 , (2.31)
1 1 2 i i i t t t t x x x , (2.32) 帶入(2.30)式, 1 2 ( 1) ( 1) 1 1 1 1 1 1 1 2 1 2 1 1 1 ( ) 2 1 1 1 2 2 1 2 1 j jj j j j j j j j j j j j j j j j j j j j j g g g m c 1 j x i x i x i x i x i k k x t t c c x i x i k x i x i x i t t m k x i x i x i x i i , (2.33) 整理可得 t
( 1) 1 1 2 2 2 ( 1) ( 1) ( 1) 1 1 1 1 2 2 1 1 2 2 2 1 1 1 1 2 2 2 2 j jj j j jj j j j j j j j j j j j j j j j j j j j j j g g g m c m m c c 1 1 1 1 j x i k k x i x i x i k x t t t t t t c c c m x i x i k x i x i x i x i x i t t t i t , (2.34) 上式運動方程式對等於第j 子結構之 ARX 模式
1 2 0 1 1 1 2 1 0 1 1 1 2 1 0 1 2 1 1 1 1 1 1 j j j j j j j j j g g g x i x i x i x i x i x i x i x i x i x i x i x i
1 1 , (2.35)其中 2 2 j j m c t t j 2 1 1 2mj t kj kj 2 2 2 j jj m t c t ( c 1) t 0 2 j j 1 1 j k ( 1) 2 2 j j c t ( 1) 0 2 j j c t 1 j k ( 1) 2 2 j j c t 2 0 j m t 2 1 2mj t 2 2 j m t 以下探討子結構系統唯一性,第n 自由度之運動方程式為:
t k xn n1
t m x tn g
( 1) 1 n n nn n n n n n n m x t c x t k x t c x , (2.36) 第n-1 自由度之運動方程式為:
1 1 ( 1)( 1) 1 1 1 ( 1) 1 n n n n n n n n n n n n g m x t c x t k k x t c x t m x t
(n 1)(n 2) n 2 n n n 1 n 2 c x t k x t k x t , (2.37) 令式(2.36)及式(2.37)相加,可得
1) ( 1) 1 1 1 ( 1) ( 1)( 2) 2 1 2 1 n n n n n n n n n nn n n n n n n n n g c x t k x t m x t c c x t c x t k x t m m x 1 1 ( 1)( n n n n m x t c t , (2.38) 利用中央差分,
( 1)( 1) ( 1) 1 1 1 1 1 1 1 2 ( 1) 2 ( 1)( 2) 2 2 1 2 1 1 2 1 1 1 2 1 2 1 1 1 2 1 1 1 2 n n n n n n n n n n n n n n nn n n n n n n n n n n n n n n g c c m 1 x i x i x i x i x i k x t t c c m x i x i x i x i x i i t x i x i k x i m m x i t 2x ig x ig 1 , (2.39) 整理可得 t c
( 1)( 1) ( 1) ( 1)( 1) ( 1) 1 1 1 1 1 1 2 2 2 ( 1) ( 1) ( 1 2 2 2 2 1 1 2 2 2 1 1 2 2 n n n n n n n n n n n n n n n n nn n n nn n n n n n n n c c c c m m m x i k x i x i t t t t t c c c c c m m m x i x i x i t t t t t 1 n )( 2) 2 ( 1)( 2) 1 2 2 1 1 2 1 1 2 1 2 n n n n n n n n n g g g x i t k x i x i m m x i x i x i t , (2.40) 上式運動方程式對等於第n-1 子結構之 ARX 模式 c 1xn2 i 2xn 2 i 1 0x ig 1 1x ig 2x ig 1 將式(2.35)之 j 取 n-1,其與式(2.41)皆為第 n-1 子結構之 ARX 模型, 兩者之輸入與輸出相同,欲估算的系統參數不相同(參看表 2.1),因 此無法得知所識別的頻率是對應於哪一系統。 第2 自由度之運動方程式為: 1 1 1 1 2 1 1 0 1 1 2 1 0 2 1 n n n g n n n n x i x i x i x x i x i x i x i , (2.41)
2 2 22 2 3 2 2 32 3 21 1 3 3 2 1 2 g m u c u k k u c u c u k u k u m u , (2.42) 第1 自由度之運動方程式為:
1 1 11 1 2 1 1 21 2 2 2 1 g m u c u k k u c u k u m u , (2.43)令式(2.42)及式(2.43)相加,可得
2 1 1 32 3
21 11
1 3 3 1 1
2 1
g 2 2 22 21 22 3 m u c c u ku mu c u c c u k u k u m m u , (2.44) 利用中央差分, 2 1 22 21 2 2 2 2 2 2 2 2 2 21 11 1 1 1 1 1 1 2 32 3 3 1 1 3 3 1 2 1 1 1 2 1 2 1 1 1 2 1 1 2 1 2 1 g g g c c m x i x i x i x i x i k x i t t c c m x i x i x i x i x i t t c x i x i k x i k x i t i x i x i , (2.45) 整理可得 m m x 22 21 22 21 2 2 2 2 2 2 2 2 2 2 21 11 21 11 1 1 1 1 1 1 1 2 2 2 32 32 3 3 3 3 2 1 2 1 1 2 2 2 1 1 2 2 1 1 1 2 2 2 g g g c c c c m m m x i k x i x i t t t t t c c c c m m m x i k x i x i t t t t t c c x i k x i x i m m x i x i x i t t 1 , (2.46) 上式運動方程式對等於第二子結構之ARX 模式
2 1 1 2 2 2 1 0 1 1 1 1 2 1 1 x i x i x i x i x i x i , (2.47)
0 3x i 1 1 3x i 2 3x i 1 0 i 1 1x ig 2x ig 1
將式(2.35)之 j 取 2,其與式(2.47)皆為第二子結構之 ARX 模型,兩者 之輸入與輸出相同,欲估算的系統參數不同(參看表 2.2),因此無法 得知所識別的頻率是對應於哪一系統。 述第 n-1 及第二子結構系統之唯一性問題,於本研究可透過結 構的幾何特性設定,使得參數之估算結果對應於欲求之子結構系統。 上2.5 隨機遞減訊號與自由衰減振動反應
結構物受到微振擾動時,產生如位移、速度、加速度等之隨機振 動反應,這些反應包含結構本身及外力的頻率,其振動無一明顯規 (Random Decrement)的方法,利用 平均 考慮一線性結構系統受一平均值為零的白訊隨機外力,其運動方 程式如下﹕ 律。Code[56]首先提出隨機遞減 樣本去除反應中之隨機訊號,獲得自由振動反應之訊號。2.5.1 隨機遞減之步驟
t
t
t
Mx +Cx + Kx = F t , (2.48) 經由下列步驟處理,可得類似自由衰減訊號之曲線﹕ 1. 選定一固定門檻值 ,通常會取該量測反應信號之標準差,令xs x t
在t1,t2tn等時間點通過xs。 2. 訂定延時時間,通常 值為該頻率寬帶最長週期的五倍左右,以 使擷取信號能表示結構之動態特性。 3. 由t1,t2開始依序擷取 時間長之量測訊號。一般而言,當訊號相繼 500 次(即 ≧500)時,可得一穩定的特徵曲線,如圖 累加超過 N 2.3 所 示 , ( ) 即 為 系 統 之 隨 機 遞 減 曲 線(random decrement signature)。2.5.2 隨機遞減法之數學基礎
假設x t( )及 為兩隨機樣本,經隨機遞減法後之訊號可定義 為﹕ ( ) y t 1 i N 1 ( ) N ( ) xx x ti
, (2.49) 1 1 ( ) N ( ) xy i i y t N
, (2.50) 其中,Bedewi[57]定義 xx( ) 及 xy( )分別稱為自方(auto-randomdec signature)及互方(cross-randomdec signature)隨機遞減訊號。若 N 趨近 於無窮大,則上式可表示成﹕
1 2 ( , ) ( ) | ( ) xx t t E x t x t xs , (2.51)
1 2 ( , ) ( ) | ( ) xy t t E y t x t xs , (2.52)
E 代表平均運算子。Vandivere 等人[58]及 Bedewi[57]證明若 其中 ( ) x t 、y t( )為穩定高斯隨機反應且外力平均值為零,則
0 xx xx s xx R x R , (2.53)
0 xy xy s xx R x R , (2.54) 其中
xx R 稱為自相關函數,Rxy
為互相關函數,即為系統之隨機遞 減訊號和自由衰減振動反應之關係式。 考慮一自由度為 n 之線性結構系統,其於 時刻之運動平衡方程ti
ti
ti
ti
Mx +Cx + Kx = F ti , (2.55) 平移時間後,可得:
ti
ti
ti
ti
Mx +Cx +Kx = F , (2.56) 歷時反應疊加後可得:
i t 經N 個不同時間
1 1 1 1 N N N N i i i i i i i t t t
Mx +
Cx +
Kx =
F , 上式除以N (2.57) 將
1 1 1 1 1 N 1 N 1 N 1 N i i i i i i i t t t N N N N ti
Mx +
Cx +
Kx =
F , (2.58) 1 1 N i t i N
Mδ + Cδ + Kδ = F 其中 , (2.59)
1 1 N i i t N
δ x , (2.60a)
1 1 N i i t N
δ x , (2.61b)
1 1 N ti i N
δ x , (2.62c) 假設外力為一平均值為零的高斯白訊,當N 時,則
1 i N 1 N i t
F 趨 近於零,則式(2.59)可改寫成 , (2.63) 黃等人[59]推廣至多自由度相關函數之間的關係,證明若外力為 一平均值為零的高斯白訊向量過程,則位移訊號及速度訊號經隨機遞 減法處理後之特徵曲線,對等於該系統之自由衰減振動反應,雖然此
M δ + C δ + K δ = 0 1 1 1 N N N i i i方法不適用於加速度訊號,但其於頻率域仍可某程度上地表現出該系 之動態特性。
第三章
數值模擬驗證
3.1 前言
本章主要為利用一六層樓剪力建築之數值地震反應及微動反應 驗證本研究所提損傷評估方法之可行性。3.2 節描述六層樓鋼構數值 模型與輸入之地震反應。3.3 節利用識別子結構系統動態參數之改變 診斷損傷發生的位置,比較不同損傷評估的方法,並於地震輸入及各 樓層之反應加入不同噪訊比之白噪雜訊,探討雜訊對子結構識別之影 響;進一步提出一簡易消除雜訊之方法。3.4 節以白噪模擬微動量測 為例。3.5 節則利用預測誤差之方法來判斷損傷發生的位置。3.2 模型概述
用於數值模擬之六層樓剪力建築如圖3.1a 所示。自由度之編號由 底部樓層至頂樓依序排列,假設[M]為集中質量(lumped mass)矩陣, [K]為三對角(tridiagonal)矩陣。此剪力屋架可簡化如圖 3.1b 所示之離 散系統。[M]及[K]表示成
0.1 0 0 0 0 0 0 0.1 0 0 0 0 0 0 0.1 0 0 0 0 0 0 0.1 0 0 0 0 0 0 0.1 0 0 0 0 0 0 0.1 M ton ,
40 40 0 0 0 0 40 80 40 0 0 0 0 40 80 40 0 0 / 0 0 40 80 40 0 0 0 0 40 80 40 0 0 0 0 40 80 K kN m , 假設系統阻尼為雷利阻尼(Rayleigh Damping),滿足
C M K
, 取α= 0.5 sec-1 及β=0.001 sec。因此,所得之阻尼矩陣為 0.09 0.04 0 0 0 0 0.04 0.13 0.04 0 0 0 0 0.04 0.13 0.04 0 0 [ ] 0 0 0.04 0.13 0.04 0 0 0 0 0.04 0.13 0.04 0 0 0 0 0.04 0.13 C , 取台中地區某自由場測站於集集地震發生時所量得之加速度歷時當 作輸入;圖 3.2 為輸入歷時圖及其傅氏譜,地震輸入資料長度為 80997 點,時間間隔為0.001 秒。3.3 利用模態參數之損傷評估–以地震反應為例
3.3.1 整體動態識別
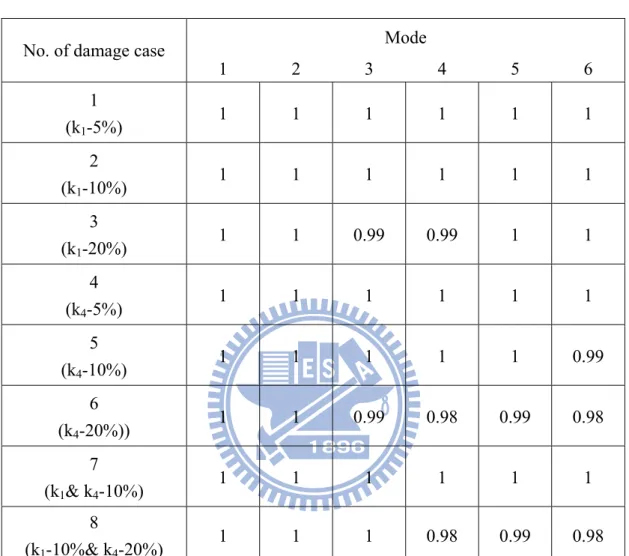
表3.1 所列者為本研究所考慮之 8 個結構損壞案例,Case 1、Case2、Case 3 分別為一樓勁度折減 5%、10%及 20%之案例,Case 4、Case 5、Case 6 為四樓勁度折減 5%、10%及 20%之案例,Case 7 為一樓、
四樓勁度各折減 10%之案例,Case 8 為一樓、四樓分別折減 10%及
圖3.3、3.4 所示為各自由度之加速度反應歷時及其傅氏譜。圖 3.4 所示之傅氏譜其尖峰值依序約為0.7~0.9、2.2~2.5、3.5~3.8、4.6~4.9、 5.4~5.7 及 6~6.3 之間,但第六模態已逐漸模糊。取對應集集地震輸入 歷時(參考圖3.2)及各自由度加速度反應(參考圖 3.3)中 t = 5~40 秒之反應進行整體結構的識別。依各尖峰值所對應頻率之約略範圍設 定連續小波轉換之尺度因子。取a=1 時,Merey 小波函數的主要頻率 保留區間為[0.5348, 0.9311],可識別到第一模態之自然振動頻率為 0.767Hz;取 a=0.3 時,Merey 小波函數對應之頻率保留區間為[1.783, 3.104],可識別到第二模態自然振動頻率 2.26Hz;取 a=0.2 時,Merey 小波函數對應之頻率保留區間為[2.674, 4.656],識可識別到第三模態 自然振動頻率 3.62Hz;取 a=0.15 時,Merey 小波函數對應之頻率保 留區間為[3.565, 6.207],可識別到第四、第五模態自然振動頻率 4.77Hz、5.64Hz;取 a=0.1 時,Merey 小波函數對應之頻率保留區間 為[5.348, 9.311],可識別到第六模態自然振動頻率 6.18Hz。依上述步 驟對表3.1 中 Case 1~ Case 8 進行整體識別,表 3.2 為各案例系統動 態特性之識別結果。由已知之