M. R. Bai
H. Lin
Z. Lin
Department of Mechanical Engineering, Chiac-Tung University, 1001 Ta-Hsueh Rd,, Hsin-Chu, Taiwan, Republic of CtiinaDevelopment and
Implementation of a
Semi-Adaptive Hoo Active Control
Algorithm for Duct Noise
A hybrid active noise control (ANC) scheme for suppressing duct noise based on the H^ control synthesis is proposed. The controllers are designed in terms of perfor-mance, stability, and robustness using a general framework of the H^ robust control theory. In addition to the fixed controller, the system is further enhanced by introduc-ing an adaptive compensator based on the least-mean-square (LMS) algorithm. Youla parameterization is employed in designing the adaptive compensator so that the resulting system is stable. Experimental investigations demonstrate that the proposed methods are effective in suppressing broadband random noise in a finite-length duct.
Introduction
Active noise control (ANC) techniques have attracted re-search attention because it provides advantages over traditional passive methods in attenuating low-frequency noises (Elliot and Nelson, 1993). However, many problems with practical applications remain to be solved prior to full commercialization of the ANC techniques. Besides the difficulty of obtaining an upstream correlated reference, acoustic feedback has been a plaguing problem that usually arises in feedforward structure. An excellent review concerning acoustic feedback can be found in the book by Kuo and Morgan (1995).
This paper adopts a new approach to tackle acoustic feedback. Semi-adaptive H„ controllers based on a hybrid (feedback/
feedforward) scheme is proposed. The H„ synthesis incorpo-rates the acoustic feedback path into the control design. In addi-tion to the fixed controllers, the system is further enhanced by introducing an adaptive compensator based on the least-mean-square (LMS) algorithm.
The Fixed / / „ Controllers
The //„ robust control theory is employed for the design of fixed controllers. The details can be found in the paper by Bai and Lin (1997). Let C(z) be the controller and P(z ) tlie primary plant. The controlled variable v{k) corresponds to various con-trol objectives z\ (k), ziik), and z^ik), and the extraneous input w{k) consists of the reference r{k), the disturbance d(k), and the noise «(fc). The signal u{k) and e{k) are the control input to the plant and the measured output from the plant, respectively. Because acoustic feedback generally causes detrimental ef-fects to the ANC systems, positive feedback loop must be taken
Although the feedforward controller is effective in broadband noise attenuation, its performance could vary drastically with system perturbations. It is desirable to develop an ANC control-ler capable of accommodating these effects. To this end, we introduce another feedback controller to the feedforward system in order to improve the system robustness. The block diagram of the hybrid structure with acoustic feedback is illustrated in Fig. 2. Ci(z) and C2(z) are the feedback and the feedforward parts of the hybrid controller. To find a H„ controller, we weight the error signal e(fc) by iyi(z), the control input u{k) by Wiiz), and the downstream sensor output y{k) by W-^iz). The input-output relation of the augmented plant corresponding to the hybrid structure can be expressed as
Zi(z)" Z^iz) Z^iz) X{z) E{z)\ = \W,{z) 0 0 1 0 - W | ( z ) F ( z ) 0 Wi{z)P{z) -P{z) 1 - W , ( z ) 5 ( z ) 1 W,(z) W,{z)S(z) - 5 ( z ) F(z) R(z) D(z) U(z) (1) here P(z) is the primary path, S{z) is the secondary path, F(z) is the acoustic feedback path. The suboptimal condition of the H„ hybrid controller reads
where
Wdz)FS(z) -W,(z)[P(z)[l - C2iz)F{z)] + C2(z)S(z)]FSiz) W2iz)FR(z) W2iz)lC2iz) - C,iz)P{z)]FSiz) W,(z.)FT(z) W3(z){P(z)[l - C2(z)F(z)] + C2(z)Fiz)}FS(z)
< 1.
into account in the design of controllers. The beauty of the H„ general framework lies in the fact that it needs no special treat-ment insofar as acoustic feedback is concerned.
Contributed by the Technical Committee on Vibration and Sound for publica-tion in the JOURNAL OF VIBRATION AND ACOUSTICS. Manuscript received June 1997. Associate Technical Editor; R. Clark.
FS(z) =
FRiz) =
1 - C2(z)F(z) 1 - C2{z)F(z) + C,(z)S(z) C2(z) - P(z)C,iz) 1 - C2(z)F(z) + C,(z)S(z) (2) (3) (4) andJournal of Vibration and Acoustics Copyright © 1999 by ASIVIE JANUARY 1999, Vol. 121 / 123
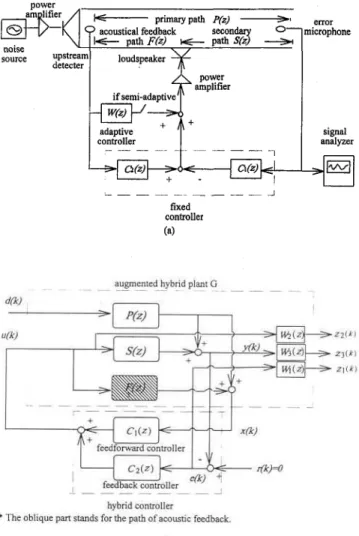
power ampliiier © noise source ^ acoustical feedback primary patli P(z) upstream detector path F(z) secondary path S(z) O— — > i loudspealcer ~ if semi-adaptive W(z)W =»Ti adaptive controller a(z) power ' amplifier - X i ^ cir^; error microphone signal analyzer fixed controller (a)
augmented hybrid plant G
hybrid controller
> The oblique part stands for the path of acoustic feedback. (b)
Fig. 1 Hybrid ANC structure including an acoustical feedback path (a) Experimental setup, (b) control block diagram
FT{.z) = P{z)\\ - Ci(z)F(z)] + Ci(z)S(z)
1 - C2(z)F(z) + Ci(z)5(z) (5)
In /foo control synthesis, the optimal tradeoff between perfor-mance and stabiUty is achieved by tuning the weighting func-tions IViCz), WaCz), and VFJCZ) that generally chosen to be low-pass, constant, and high-low-pass, respectively.
The Semi-Adaptive H^ Controllers
In practical applications, ANC schemes with more flexibility should be sought to further enhance the performance of the system. This can be done by nesting an adaptive compensator based on LMS algorithm to the original fixed controller. Be-cause of the coupling between the fixed controller and the adap-tive compensator, we refer the scheme as the semi-adapadap-tive controller.
The semi-adaptive hybrid structure is shown in Fig. 2. The primary plant, P ( z ) , is the transfer function formed by the primary acoustic path, the power amplifier, the upstream sensor, and the error microphone. The secondary plant S{z) is the trans-fer function of the cancellation path formed by the canceling loudspeaker, the power amplifier, the secondary acoustic path, and the error microphone. The transfer function F(z) is the acoustical feedback path formed by the canceling loudspeaker, the power amplifier, the acoustical feedback path, and the up-stream sensor. The transfer functions Cx(,z) and C2{z) are the fixed feedforward controller and the feedback controller ob-tained by //„ synthesis. Note that r ( z ) is a transfer function
describing the source dynamics formed by the primary source, a power amplifier, an acoustical path, and the upstream micro-phone. Finally, lV(z), represents the adaptive compensator that is aimed to fine-tune the fixed controllers. Hence, the model-matching problem can be expressed as
mm P +
S-1 - F(Ci -^ W) + SC2 (6)
Here, T{z) may not be measurable so that a heuristic guess is needed.
Instability may arise after the introduction W{z). The com-pensator W{z) must be designed with care under the constraint that the resulting system is internally stable. The key of undoing this difficulty is the Youla's parametrization (Youla et a l , 1976). For a stable plant K{z), the Youla's theorem indicates that the controllers W{z) that guarantee the internal stability of the closed-loop system can be parametrized as
W{z) = Qiz)
1 - K{z)Q{z) (7)
where the parameter Qiz) is a stable, proper, and real-rational function (denoted as Q{z) e RH") and
K{z) = -F{z)
1 - CAz)F{z) + C,(z)5(z) (8)
Substituting Eq. (7) into the minimization problem in Eq. (6) leads to
mm P -^
S-(1 -KQKC -PC2) + Q (1 - KQ){\ -FC, +SC2) + FQ
(9) The optimal solution of Eq. (16), g„p,(z), can be obtained by using the LMS algorithm. The update formula for the LMS algorithm can be shown to be
Q{k+ 1) = Q{k) - iJjc'{k)e(k), (10) where x'{k) = m{k)*x(k) is the filtered input signal, x(k) is the upstream microphone signal, and m(k) is the impulse re-sponse of
Fig. 2 Block diagram of the semi-adaptive H„ hybrid controller
124 / Vol. 121, JANUARY 1999 Transactions of the ASME
M(z) = S(z)
1 - CAz)F(z) + C,(z)S(z)
Experimental Investigations
A rectangular duct of cross-section 0.25 X 0.25 m and length 1 m is used for the experiments, which renders the cutoff fre-quency 690 Hz. The sampling rate is selected to be 2 kHz. The upstream reference microphone and error microphone are located at 0.25 m and 0.75 m, respectively, from the source end. On the other hand, the error microphone is placed in the close vicinity of the control loudspeaker to form the so-called collocated control.
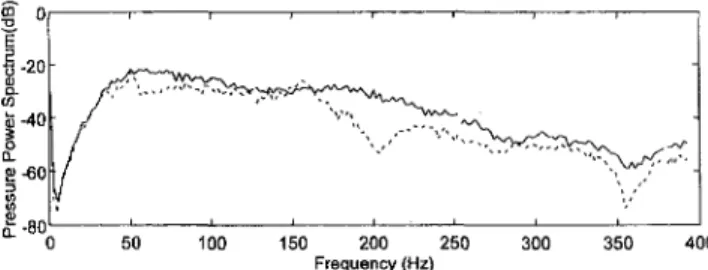
The forgoing //„ and LMS designs are applied to obtain the fixed and adaptive controllers. The controllers are then coded into digital filters using TMS320C31. Gaussian white noise is chosen in the experiment. The pressure spectra of the residual noise at the error microphone position with and without active control are shown in Fig. 3. The semi-adaptive H^ hybrid con-troller shows effectiveness in suppressing the white noise. Ap-proximately 3-10 dB and 5-23 dB noise attenuation have been achieved in two bands 50-100 Hz and 170-400 Hz, respec-tively. The total attenuation within the band 0-400 Hz is 4.85 dB.
Conclusions
The semi-adaptive hybrid active noise controller has been developed for suppressing duct noise. The controller design is based on a general framework of the //„ theory that takes into account performance, stability, and robustness of the control system. The performance has been improved by introducing the
50 100 150 200 260 300 350 400 Frequency (Hz)
Fig. 3 The residual sound pressure spectra obtained by ANC. The Gaussian white noise is used as the primary source. The ANC method is the semi-adaptive H„ hybrid controller. Active control off _; control on.
feedback compensator and the LMS compensator. The proposed method shows potential in suppressing broadband noise.
Acknowledgments
The work was supported by the National Science Council in Taiwan, Republic of China, under the project number NSC 86-2212-E-009-003.
References
Bai, M. R., and Lin, H. H., 1997, "Comparison of Active Noise Control Struc-tures in tlie Presence of Acoustical Feedback by Using the H„ Synthesis Tech-nique," Journal of Sound and Vibration, Vol. 206, pp. 453-471.
Elliot, S. J., and Nelson, P. A., 1993, "Active Noise Control," IEEE Signal
Processing Magazine, Vol. 10, pp. 12-35.
Kuo, S. M., and Morgan, D. R., 1995, Active Noise Control Systems: Algorithms
and DSP Implementations, New York, John Wiley and Sons.
Youla, D. C , Jabr, H. A., and Bongiorno, J. J., 1976, "Modern Wiener-Hopf Design of Optimal Controllers, Part 2: the Multivariable Case," IEEE Trans.
Auto. Control, Vol. 21, pp. 319-338.
Journal of Vibration and Acoustics JANUARY 1999, Vol. 121 / 125