On: 27 April 2014, At: 17:36 Publisher: Taylor & Francis
Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK
Journal of the Chinese Institute of Engineers
Publication details, including instructions for authors and subscription information: http://www.tandfonline.com/loi/tcie20
Evolutionary
‐based virtual training in extracting
fuzzy knowledge for deburring tasks
Shun‐Feng Su a , Tar‐Jyh Horng b & Kuu‐Young Young b
a
Department of Electrical Engineering , National Taiwan University of Science and Technology , Taipei, Taiwan 106, R.O.C. Phone: 886–2–27376704 Fax: 886–2–27376704 E-mail:
b
Department of Electrical and Control Engineering , National Chiao Tung University , Hsinchu, Taiwan 300, R.O.C.
Published online: 04 Mar 2011.
To cite this article: Shun‐Feng Su , Tar‐Jyh Horng & Kuu‐Young Young (2004) Evolutionary‐based virtual training in extracting fuzzy knowledge for deburring tasks, Journal of the Chinese Institute of Engineers, 27:2, 193-202, DOI: 10.1080/02533839.2004.9670864
To link to this article: http://dx.doi.org/10.1080/02533839.2004.9670864
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) contained in the publications on our platform. However, Taylor & Francis, our agents, and our licensors make no
representations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of the Content. Any opinions and views expressed in this publication are the opinions and views of the authors, and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon and should be independently verified with primary sources of information. Taylor and Francis shall not be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use of the Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any
form to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http:// www.tandfonline.com/page/terms-and-conditions
Journal of the Chinese Institute of Engineers, Vol. 27, No. 2, pp. 193-202 (2004) 193
EVOLUTIONARY-BASED VIRTUAL TRAINING IN EXTRACTING
FUZZY KNOWLEDGE FOR DEBURRING TASKS
Shun-Feng Su*, Tar-Jyh Horng, and Kuu-Young Young
ABSTRACT
In this research, the problems of how to teach a robot to execute skilled opera-tions are studied. Human workers usually accumulate their experience after execut-ing the same task repetitively. In the process of trainexecut-ing, a worker needs to find ways of adjusting his/her execution. In our system, the parameters for an impedance con-trol scheme are considered as the targets for adjustment in the training process. The way to make adjustments is represented as a set of fuzzy rules in our research. Furthermore, a training scheme, called the evolutionary-based virtual training scheme, is proposed to extract knowledge (a set of fuzzy rules) for robotic deburring tasks. In this approach, an evolutionary algorithm is employed to find the best set of fuzzy rules and a simulation system is built to evaluate the execution performances of candidates. This learning scheme has been applied in finding a set of fuzzy rules that can adjust the parameters of impedance controllers required in deburring operations with satisfactory performance in deburring tasks.
Key Words: virtual training, evolutionary algorithms, fuzzy rule extracting, deburring tasks.
*Corresponding author. (Tel: 27376704; Fax: 886-2-27376699; Email: [email protected])
S. F. Su is with the Department of Electrical Engineering, Na-tional Taiwan University of Science and Technology, Taipei, Tai-wan 106, R.O.C.
T. J. Horng and K. Y. Young are with the Department of Elec-trical and Control Engineering, National Chiao Tung University, Hsinchu, Taiwan 300, R.O.C.
1. INTRODUCTION
Recently, industry has successfully employed robots to execute various tasks in which the working environment is harmful to human beings or opera-tions are repetitive and/or require high accuracy. Usually, those tasks can be programmed into opera-tions of robots because those tasks do not interact with the environment frequently and then human skill may not be necessary for the operations of the tasks. There may also exist tasks, such as deburring, grinding, mill-ing, assembly, etc., which need interactions with the environment and thus, require decision-making while facing those interactions. Such tasks are very diffi-cult to satisfactorily program into robot operations.
Several researchers have tried to discover rela-tionships between human experts’ intentions and
operational strategies for tasks so that skills needed for accomplishing those tasks could be modeled and then possibly transferred into operations of robots. Asada et al. have employed neural networks (Asada and Liu, 1991a; Asada and Liu, 1993), adaptive con-trol (Asada and Liu, 1991b), and fuzzy rules (Asada and Yang, 1992) to model and to transfer human skills into operations of robots. In (Guan, 1995), human skills are considered as the desired position com-mands to the controller of a robot manipulator dur-ing the execution of a compliant task. Other parameters, such as the parameters required in im-pedance control, are chosen as constants. The results in our simulation showed that the performance could be improved by changing those parameters. In order to acquire human skills, in (Asada et al., 1991), the joints of a robot manipulator are relaxed and then a human expert worker is asked to take the end-effec-tor of the robot to accomplish a compliant task, for instance, deburring. The data of the deburring process, such as angles and torques of all joints are recorded. The approach then extracts useful rules or strategies for representing skills from the collected data. However, there are problems in that approach. First, the obtained rules or strategies based on this
set of data may not be able to represent the skills sufficiently. Secondly, the rules or strategies ex-tracted from the data are rather primitive and are sen-sitive to operational conditions. Thus, it may be de-sired to further generalize the obtained knowledge to cope with the variation of tasks.
In this research, we propose a novel idea of recoding knowledge for skilled tasks. The consid-ered task is the deburring operation. The recorded knowledge in our research is the impedance control-ler characterized by a set of fuzzy rules. We attempt to use the parameters required in impedance to rep-resent the operational skills for deburring to overcome various problems mentioned above. However, it is difficult to obtain these kinds of rules from expert knowledge or a set of training data. This paper then presents an approach using evolutionary algorithms in finding the best set of fuzzy rules for the imped-ance controller through simulation. It is called evo-lutionary-based virtual training in the paper. The simulation results have demonstrated good perfor-mance from the proposed approach in deburring operations.
The organization of the paper is as follows. Section II describes the concept of virtual training. In section III, the robotic impedance control is presented. The fuzzy rules used in coding knowl-edge for deburring tasks are proposed in section IV. In section V, the evolutionary algorithm used is described. We employed those mechanisms in our simulations. The detailed implementation environ-ment and simulation results are presented in section VI. Finally, section VII concludes the paper.
II. THE CONCEPT OF EVOLUTIONARY-BASED VIRTUAL TRAINING
The idea of virtual training is to train operational schemes in a virtual environment, which is a simula-tion system that can truly model the considered environment. In such a system, when simulation re-sults are not acceptable, operational schemes are modified, and then another simulation is conducted. Hopefully, after a period of training, an operational scheme yielding acceptable performance can be obtained. The name “virtual training” is adopted from an often-used terminology - virtual reality, which is also a simulation system for emulating scenarios in the real world.
In our research, a virtual robot environment is built. The performance of a deburring operation is evaluated by using results obtained from the virtual environment. From the training viewpoint, the sys-t e m i s sys-t r a i n e d sys-t o e x e c u sys-t e d e b u r r i n g sys-t a s k s satisfactorily, and such knowledge is accumulated through practice. One advantage of this approach is
that there is no cost for repetitive operations, and a mass amount of training becomes possible. Another advantage is that it is possible to capture all kinds of information or states that may be difficult or impos-sible to get in real world operations. Finally, due to the rapid growth of the techniques in virtual reality, to model a real world system accurately will eventu-ally come true. Then, the concept of virtual training may become actually applicable.
Roughly speaking, there are two subsystems in our training system, the compliance controller and the learning module to record knowledge through training. The compliance controller used is an im-pedance control scheme. In this research, the knowl-edge to be learned is the rules for determining the parameters required in an impedance control scheme. Nevertheless, the representation of knowledge by using rules is discrete in nature, but the data obtained are for continuous variables. Thus, in order to soften the boundary between rules, the fuzzy set theorem (Zadeh, 1965) is adopted for rule reasoning in this research. The structure of fuzzy rules used for the operational skills is introduced in Section IV.
In the process of training, the system must find ways of adjusting its execution. In our system, the parameters for an impedance control scheme are used as the targets for adjustment. In our system, the per-formance of the current set of rules is evaluated through simulation. In a training paradigm, various patterns (sets of rules) must be used to explore all possibilities to search for the pattern that can yield the best performance. However, if the training pat-terns are tried in a random manner, the search for find-ing the best candidate may take lots of time. For our case, the number of possible sets of rules is extremely large, and the exhaustive search for all sets is impossible. Therefore, it is natural to think about the use of evolutionary algorithms to provide an effec-tive way of finding the best candidate. Such an ap-proach is called evolutionary-based virtual training in our research. The evolutionary algorithm used will be described in Section V.
III. ROBOTIC IMPEDANCE CONTROL
In this research, deburring tasks are used as the skilled operations for training. Various control schemes (Kazerooni et al., 1986; Kazerooni and Her, 1991) can be used as the compliance controller for deburring tasks. Impedance control was first pro-posed in (Hogan, 1985) and was proved to be stable in contact tasks in (Hogan, 1987; Hogan, 1988). The impedance control has been proven to be feasible for deburring operations. In this research, the impedance controller is used as the control scheme due to its flex-ibility and simplicity.
S. F. Su et al.: Evolutionary-Based Virtual Training in Extracting Fuzzy Knowledge for Deburring Tasks 195
The control strategy of impedance control is to allow the end-effector of a robot manipulator to re-spond to an environmental force with desired target impedance. With simple physics, the following equa-tion is obtained
MdX +BdX +Kd(X−Xd)=Fext (1)
where Md, Bd and Kd are the inertial, the damping
and the stiffness matrices, respectively, in the Carte-sian space specified by the designer. X, X , and X are the end-effector’s position, velocity and accelera-tion vectors in the Cartesian space, respectively. Xd
is the goal position vector in the Cartesian space, and Fext is the external force caused by the environment.
The impedance in Eq. (1) is a decoupled form in the Cartesian space. Since the control of a robot manipulator is always considered in the joint space, the above equation must be transformed into the joint space to derive the required control torque. Let L be the transformation between the joint space and the Cartesian space and denoted X=L(q), where X is the position vector in the Cartesian space and q is the angle vector in the joint space. From the robot dy-namics (Fu et al., 1989):
H(q)q +V(q,q )+G(q)=ττact−JTFext (2)
where ττact is the generalized torque vector applied at
joints, q is the vector of the joint variables, q is the vector of the joint velocity, q is the vector of the joint acceleration, H(q) is the inertial acceleration-related symmetric matrix, V(q,q ) is the nonlinear Coriolis and centrifugal vector, G(q) is the gravity loading force vector, and J is the Jacobian matrix and is defined as X =Jq . With simple manipulation (Horng, 1996) and defining W=JH−1
JT
, the acting torque for robot joints is
ττact=JTFext+V+G+JTW−1M d
– 1
(Fext−BdX−
Kd(X−Xd))−JTW−1Jq (3)
In the use of impedance control, one major is-sue is to select Md, Bd and Kd properly. In the work
of (Guan, 1995), those parameters are chosen as con-stants in his work of transferring human skills. The results in later simulations showed that the perfor-mance could be improved by changing the parameters required in the impedance control mechanism. Thus, in order to obtain a better result for deburring operations, a way of determining when and how to change those parameters must be defined.
IV. FUZZY RULES FOR DEBURRING TASKS
Since Zadeh proposed the concept of fuzzy sets
in (Zadeh, 1965), many applications of using fuzzy systems have demonstrated good performance (Kim
et al., 1994; Lin and Lee, 1996; Chen, 1998).
Com-pared to the use of classical rules, fuzzy rules together with approximate reasoning mechanisms can provide various advantages.
In our implementation, the used fuzzy rules for adjusting the parameters of impedance controllers are of the form:
Ri: IF (current-state∈Api) THEN ∆P=θi
i=1, ..., n (4)
where Api is the fuzzy label for the parameter P in the i-th rule, ∆P is the variable of the increment for the
parameter P, θi is the incremental value assigned by
this rule. This rule form is similar to that used in (Asada and Yang, 1992) except that their rules are identified from a human expert and then categorized based on expert linguistic information. It should be noted that in our rule form, θi is a crisp value. Thus,
the fuzzy models used can be considered as a TSK fuzzy model (Takagi and Sugeno, 1985) and then the TSK fuzzy reasoning approach (Takagi and Sugeno, 1985; Lin and Lee, 1996; Jang et al., 1997) is used for the reasoning process.
In this research, only line deburring tasks are discussed, and then the considered dimension is 2. In those rules, we either used the error on the burr axis (denoted as x1) or the speed on the moving axis
(denoted as x2) as the current state to determine how
to adjust those parameters. In our implementation, those parameters used for adjusting are Md, Bd, Kd,
and Xd, in Eq. (1). For simplicity, all variables are
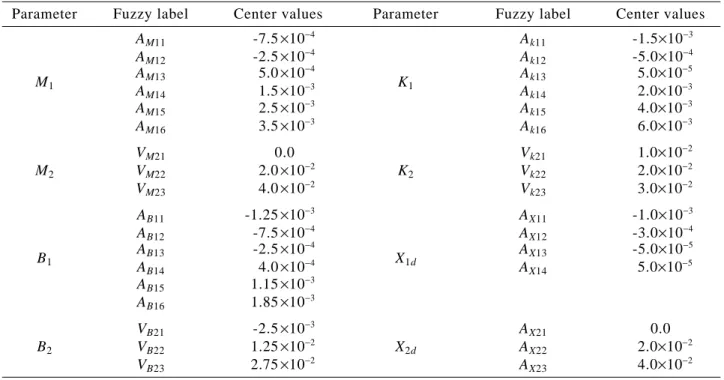
considered independently in our system. Thus, there are 8 groups of fuzzy rules and the fuzzy member-ship functions used are all triangular shapes with over-lap ratios all 1 (Lin and Lee, 1996; Jang et al., 1997). In this study, these fuzzy membership functions are selected as long as they are feasible. Since evolu-tionary algorithms are used in tuning rules, in order to have inheritance between generations the fuzzy membership functions are kept fixed in our study. Fig. 1 shows the membership functions for the rules of adjusting Md on the x1 axis and the other
member-ship functions are similar and their center values are listed in Table 1. In the table, Api’s are fuzzy labels
for the error on the x1 axis and Vpi’s are fuzzy labels
for the speed on the x2 axis.
For the consequence parts of fuzzy rules, θi’s,
they are tuned in the training process. Various ap-proaches (Takagi and Sugeno, 1985; Lin and Lee, 1996; Jang et al., 1997; Juang and Lin, 1998) have been proposed to train parameters in fuzzy rules. However, those approaches are to tune the parameters
in a supervised and off-line manner. In other words, there must exist a subsystem that can tell the learn-ing system what is correct and the trainlearn-ing data must be available in a batch. In this research, due to the lack of a supervising block that can tell which one is desired, an evolutionary algorithm is used to search for θi’s in the rules.
V. EVOLUTIONARY ALGORITHMS
Evolutionary algorithms are ways of finding a set of parameters that can optimize a fitness function and are traditionally referred to as genetic algorithms (Back et al., 1997), which are defined for the prob-lems of finding the best combination of genes (binary) (Goldberg, 1989; Holland, 1975). Various applica-tions can be found in robotics, such as solving in-verse kinematics of redundant robots (Parker et al.,
1989), motion planning and obstacle avoidance (Shibata and Fukuda, 1993), or navigation of mobile robot (Hashimoto et al., 1995). Evolutionary algo-rithms can also cooperate with fuzzy systems or neu-ral networks to search for optimal solutions (Fukuda and Shimojima, 1995; Ishibuchi et al., 1995; Park et
al., 1994). In (Ishibuchi et al., 1995), genetic
algo-rithms are used to select fuzzy rules for classifica-tion problems. In (Park et al., 1994), a genetic-based method is proposed to look for an optimal fuzzy rela-tion matrix in the New Fuzzy Reasoning Method (NFRM) (Cao et al., 1990) and to tune membership functions such that the obtained fuzzy rules can gen-erate outputs as close to the actual data as possible. In this study, we also employed evolutionary algo-rithms to define fuzzy rules under the proposed vir-tual training system. We believe that other ways of combining fuzzy and evolutionary algorithms might have better learning performance than the one used here. However, this is not important in our problem b e c a u s e i t c a n o n l y r e d u c e t h e l e a r n i n g t i m e (generations) and has nothing to do with the deburring performance.
Due to the nature of adaptation to the problem in evolutionary algorithms, we proposed to build an evolutionary-based virtual training system to extract knowledge for robotic deburring tasks. Generally speaking, evolutionary algorithms are to search for better alternatives based on a given fitness function through the evolution of chromosomes. Chromo-somes encode solutions to the problem and a fitness function is used to evaluate those chromosomes. At
AM11AM12AM13AM14 AM15 AM16
-7.5×10−4 -2.5×10−41.5×10−4 2.5×10−3 3.5×10−3 0.5×10−4
Table 1 The center values for all used fuzzy labels for parameters in our impedance control scheme
Parameter Fuzzy label Center values Parameter Fuzzy label Center values
AM11 -7.5×10−4 Ak11 -1.5×10−3 AM12 -2.5×10−4 Ak12 -5.0×10−4 AM13 5.0×10−4 Ak13 5.0×10−5 M1 K1 AM14 1.5×10−3 Ak14 2.0×10−3 AM15 2.5×10−3 Ak15 4.0×10−3 AM16 3.5×10−3 Ak16 6.0×10−3 VM21 0.0 Vk21 1.0×10−2 M2 VM22 2.0×10−2 K2 Vk22 2.0×10−2 VM23 4.0×10−2 Vk23 3.0×10−2 AB11 -1.25×10−3 AX11 -1.0×10−3 AB12 -7.5×10−4 AX12 -3.0×10−4 AB13 -2.5×10−4 AX13 -5.0×10−5 B1 X1d AB14 4.0×10−4 AX14 5.0×10−5 AB15 1.15×10−3 AB16 1.85×10−3 VB21 -2.5×10−3 AX21 0.0 B2 VB22 1.25×10−2 X2d AX22 2.0×10−2 VB23 2.75×10−2 AX23 4.0×10−2
Fig. 1 The fuzzy membership functions for M1
S. F. Su et al.: Evolutionary-Based Virtual Training in Extracting Fuzzy Knowledge for Deburring Tasks 197
first, an initial population is selected. Each chromo-some in the population is evaluated in terms of its fitness. If given stopping criteria (for example, achieving a desired fitness value, no change in the old and new population for a long time, or reaching a specified computing time) are not met, evolutionary o p e r a t i o n s a r e p e r f o r m e d t o g e n e r a t e n e w chromosomes. In the generation process, chromo-somes are selected from the population with probabili-t i e s p r o p o r probabili-t i o n a l probabili-t o probabili-t h e i r f i probabili-t n e s s v a l u e s f o r reproduction. The whole process is repeated until the given stopping criteria are met. The solution is the best chromosome in the final population.
In this work, those θi’s for 8 groups of fuzzy
rules are ∆M1, ∆M2, ∆B1, ∆B2, ∆K1, ∆K2, ∆X1d, and ∆X2d, respectively, and are to be determined in the
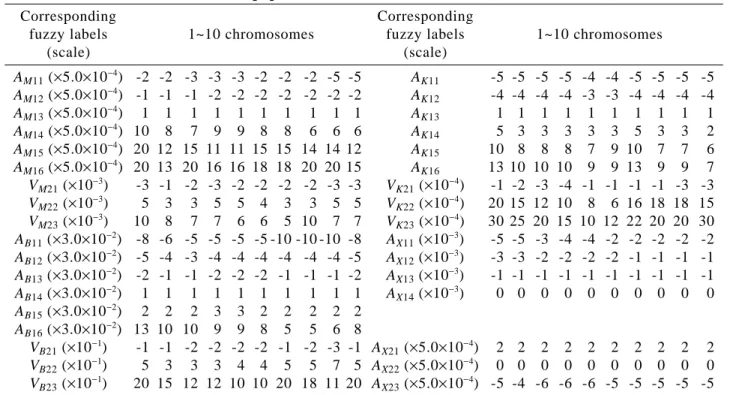
training process. By referring to Table 1, there are 34 attributes in each chromosome. The initial popu-lation (10 chromosomes) used is listed in Table 2. Those values are selected only because they are feasible. Since those attributes are real numbers, floating evolutionary operators are used. Consider two chromosomes ζ=<ζ1, ζ2, ..., ζn> and η=<η1, η2, ..., ηn>. In our example, n=34. For the crossover
operations, new chromosomes are obtained as <ζ1+
(η1−ζ1)/a1, ζ2+(η2−ζ2)/a2, ..., ζn+(ηn−ζn)/an> and
<η1+(ζ1−η1)/b1, η2+(ζ2−η2)/b2, ..., ηn+(ζn−ηn)/bn>,
where ai and bi are selected randomly in the interval
[2, 5]. This interval is heuristically determined. For the mutation operation, the deviation value should be limited to a given range; otherwise the robotic
operation might become unstable. When ζi is chosen
for mutation, ζ=<ζ1, ..., ζi, ..., ζn> is changed to ζ*=
<ζ1, ..., ζi+δ, ..., ζn>, where δ is within the region
[-3,3]. In our implementation, each attribute has its mutation probability, and there may exist more than one mutation in a chromosome. The mutation prob-ability of each attribute is 0.03.
VI. SYSTEM IMPLEMENTATION AND SIMULATION RESULTS
The idea of our approach is to operate a robot simulator to execute a deburring task and when the execution is not acceptable, the rules for adjusting Md, Bd, Kd, and Xd of each dimension are then
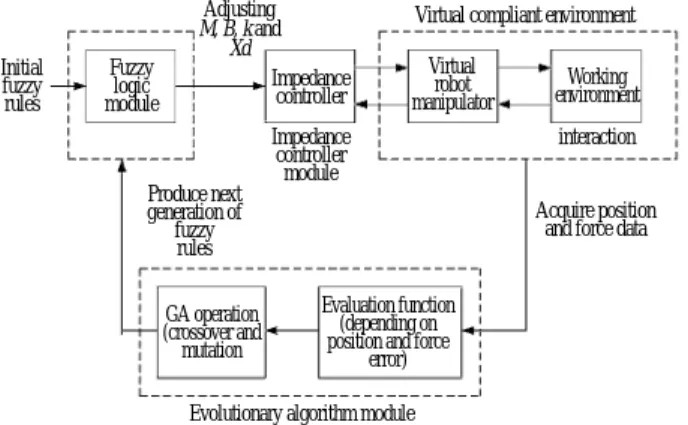
modified. Fig. 2 shows the block diagram of our system. First, a set of rules enters into the system. Then, the impedance controller uses those parameters d u r i n g t h e t a s k e x e c u t i o n . A f t e r t h e t a s k i s accomplished, the fitness of the results is evaluated. The evolutionary algorithm is then used to produce new sets of rules for evaluation. Hopefully, with the evolutionary based training mechanism, a set of rules that can achieve satisfactory results is acquired.
There are several different forms of dynamics (Guan, 1995; Kazerooni and Her, 1991; Bone and Elbestawi, 1994; Kuan and Young, 1998) that can be used to describe the interaction between the robot end-effector and the working environment. A simple dy-namic model used in (Guan, 1995) is adopted in this simulation. The deburring model used is shown in
Table 2 The initial population used in the simulation (10 chromosomes)
Corresponding Corresponding
fuzzy labels 1~10 chromosomes fuzzy labels 1~10 chromosomes
(scale) (scale) AM11 (×5.0×10−4) -2 -2 -3 -3 -3 -2 -2 -2 -5 -5 AK11 -5 -5 -5 -5 -4 -4 -5 -5 -5 -5 AM12 (×5.0×10−4) -1 -1 -1 -2 -2 -2 -2 -2 -2 -2 AK12 -4 -4 -4 -4 -3 -3 -4 -4 -4 -4 AM13 (×5.0×10−4) 1 1 1 1 1 1 1 1 1 1 AK13 1 1 1 1 1 1 1 1 1 1 AM14 (×5.0×10−4) 10 8 7 9 9 8 8 6 6 6 AK14 5 3 3 3 3 3 5 3 3 2 AM15 (×5.0×10−4) 20 12 15 11 11 15 15 14 14 12 AK15 10 8 8 8 7 9 10 7 7 6 AM16 (×5.0×10−4) 20 13 20 16 16 18 18 20 20 15 AK16 13 10 10 10 9 9 13 9 9 7 VM21 (×10−3) -3 -1 -2 -3 -2 -2 -2 -2 -3 -3 VK21 (×10−4) -1 -2 -3 -4 -1 -1 -1 -1 -3 -3 VM22 (×10−3) 5 3 3 5 5 4 3 3 5 5 VK22 (×10−4) 20 15 12 10 8 6 16 18 18 15 VM23 (×10−3) 10 8 7 7 6 6 5 10 7 7 VK23 (×10−4) 30 25 20 15 10 12 22 20 20 30 AB11 (×3.0×10−2) -8 -6 -5 -5 -5 -5 -10 -10 -10 -8 AX11 (×10−3) -5 -5 -3 -4 -4 -2 -2 -2 -2 -2 AB12 (×3.0×10−2) -5 -4 -3 -4 -4 -4 -4 -4 -4 -5 AX12 (×10−3) -3 -3 -2 -2 -2 -2 -1 -1 -1 -1 AB13 (×3.0×10−2) -2 -1 -1 -2 -2 -2 -1 -1 -1 -2 AX13 (×10−3) -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 AB14 (×3.0×10−2) 1 1 1 1 1 1 1 1 1 1 AX14 (×10−3) 0 0 0 0 0 0 0 0 0 0 AB15 (×3.0×10−2) 2 2 2 3 3 2 2 2 2 2 AB16 (×3.0×10−2) 13 10 10 9 9 8 5 5 6 8 VB21 (×10−1) -1 -1 -2 -2 -2 -2 -1 -2 -3 -1 AX21 (×5.0×10−4) 2 2 2 2 2 2 2 2 2 2 VB22 (×10−1) 5 3 3 3 4 4 5 5 7 5 AX22 (×5.0×10−4) 0 0 0 0 0 0 0 0 0 0 VB23 (×10−1) 20 15 12 12 10 10 20 18 11 20 AX23 (×5.0×10−4) -5 -4 -6 -6 -6 -5 -5 -5 -5 -5
Fig. 3. The environment can be modeled as (Guan, 1995):
−Fext=MeX +BeX +Ke(X−Xe) (5)
where Me, Be and Ke are the inertial, the damping and
t h e s t i f f n e s s m a t r i c e s , r e s p e c t i v e l y , o f t h e environment, and Xe is the position vector of the
environment. This external force is caused by the deformation of the workpiece. Usually, this type of dynamics of environment is adequate. The deburring behavior is characterized by:
Xe1= – kb Fext1 x2 +σ
(6)
where Xe1 is the deburring effect, which is the change
of the position vector on the x1 axis, Fext1 is the
ex-ternal force on the x1 axis, kb and σ are positive
constants. kb represents the efficiency of deburring.
When kb is large, the efficiency of deburring is high.
A small constant σ is to avoid dividing by zero in Eq. (6).
The requirements of deburring tasks in our train-ing are described as follows. First, when the end-effector of the robot manipulator is in contact with the working environment, big impact should be avoided. Secondly, the line after deburring is asked to be as close to the desired line as possible, and then the position error is one index of the performance measure. Thirdly, the stability during the execution of the task needs to be assured. Finally, the execu-tion time should not exceed a prescribed value. Besides, the weight of the position performance in the evaluation function is larger than that of the time consumption and of the force exertion.
According to the above task requirements, the fitness function used to evaluate the performance of a deburring operation is defined as:
score=W1×score1 2×count + W2×score2 2×count +(100−W1−W2) ×exp(−p2×count) (7) score1=
Σ
[sgn(0.4 – X01i) i = 0 n ×exp(−p3×(0.4−X01i))] (8)score2= [exp( – p1×(Fext1– Flmt) 2 )
Σ
i = 0 n ×exp(−p1×(Fext2−Flmt)2)] (9)where W1 and W2 are the weights for the position and
for the force performances, respectively. Flmt is the
desired force. p1, p2, and p3 are the multipliers in
different scores. 0.4 is the desired position and X01i
is the position after deburring for the ith point.
count=n is the number of points needed to
accom-plish a deburring task. Thus, score1 is to evaluate
the performance of X01i (position) and score2 is to
evaluate the performance of external force. count is the measure of the execution time. In this simulation, the counting number cannot exceed a desired number. If it exceeds this desired number, the evaluation score is set as zero. In other words, if the speed of the deburring operation is too slow, the deburring opera-tion will be regarded as a failed operaopera-tion. In the same way, if the external force exceeds a tolerable force, the robot simulator alerts the user and also the evaluation score is set as zero. The values of robot simulator’s parameters and other parameters used in our implementation are shown in Table 3.
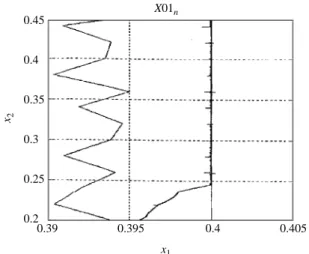
First, the simulation result using the initial rules is shown in Fig. 4. In the figure, the horizontal axis is x1, the vertical axis is x2, and besides the original
burr profile and the desired line (at x1=0.4), the
re-sultant positions (X01i) for all points are shown. It is
clearly evident that the performance is not good. Our
Fuzzy logic module Adjusting M, B, k and Xd GA operation (crossover and mutation Evaluation function (depending on position and force
error) Impedance controller Impedance controller module interaction Virtual compliant environment
Evolutionary algorithm module
Acquire position and force data Virtual robot manipulator Working environment Initial fuzzy rules Produce next generation of fuzzy rules
Fig. 2 The diagram of the evolutionary based virtual training system x2 x1 x1=0.4 Desired contour 0 Bur Ending point=(0.4,0.45) Change command: X1d: X2d: K1: K2: M1: M2: B1: B2: Start point=(0.4,0.2)
Fig. 3 The used virtual robot simulator
S. F. Su et al.: Evolutionary-Based Virtual Training in Extracting Fuzzy Knowledge for Deburring Tasks 199
system is then trained by using the evolutionary al-gorithm with the maximal allowed points = 3000 to find a set of suitable rules. The deburring result by using the obtained fuzzy rules is shown in Fig. 5. It
can be found that our approach indeed can train the fuzzy rules to perform deburring tasks nicely. Fig. 6 is another training result by using another burr profile. Again, the training is effective. Now, let the
Table 3 The values for various parameters used in our implementation
Entities Symbols Description Values
l1 The length of the first link 0.3m
l2 The length of the second link 0.32m
Parameters for
m1 The mass of the first link 2.815kg
the robot
m2 The mass of the second link 1.640kg
manipulator
I1 The inertial of the first link 0.0234kg-m2 I2 The inertial of the second link 0.0234kg-m2 Me1 The environment mass on the x1-axis 0.0 Me2 The environment mass on the x2-axis 0.0
Parameters for Be1 The environment damping on the x1-axis 0.5
the virtual Be2 The environment damping on the x2-axis 0.5
environment Ke1 The environment stiffness on the x1-axis 100000 Ke2 The environment stiffness on the x2-axis 10000 Cfri The friction force coefficient on the x2-axis 0.2
kb The deburring coefficient 5
Md1 The desired mass on the x1-axis 1.0 Md2 The desired mass on the x2-axis 1.0
Parameters for
Bd1 The desired damping on the x1-axis 50
the initial
Bd2 The desired damping on the x2-axis 8
target impedance
Kd1 The desired stiffness on the x1-axis 625 Kd2 The desired stiffness on the x2-axis 16
W1 The weight for the error score 50
W2 The weight for the external force 30
Parameters for p1 The multiplier for the external force on the x1-axis 0.005
the fitness p2 The multiplier for the external force on the x2-axis 0.005
function p3 The multiplier for the error (if (0.4-X01n)>0.0) 500 p3 The multiplier for the error (if (0.4-X01n)≤0.0) 200
Flim it The desired force -15 NT
Fig. 4 The results by using the initial rule
0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 Desired line Burr x1 X01n x2
Fig. 5 The results of using the obtained rules (workpiece 1 and max=3000 points) with score 39.313
0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 Result line Burr x1 X01n x2
maximal allowed points become 4000; that is, a longer deburring process is allowed. The results are shown in Figs. 7 and 8. It can be found that the evaluated score are both higher than the former ones. For comparison, the results in (Guan, 1995) are also cited and shown in Fig. 9. It is evident that our results are much better than those in (Guan, 1995). It can be concluded that this approach can indeed achieve the purpose of training. In order to show that the idea of using the parameters in impedance controllers as knowledge is feasible, the obtained rules are applied to the workpieces with the same environmental pa-rameters but different burr profiles. The set of rules obtained from the first case is used to debur the workpiece of the second case and the result is shown in Fig. 10. Similarly, the set of the rules obtained from the second case is also used to debur the workpiece of the first case and the result is shown in Fig. 11. It is evident that both cases are successfully performed.
Fig. 6 The results of using the obtained rules (workpiece 2 and max=3000 points) with score 40.715
Fig. 7 The results of using the obtained rules (workpiece 1 and max=4000 points) with score 41.725
Fig. 8 The results of using the obtained rules (workpiece 2 and max=4000 points) with score 41.165
0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 x1 X01n x2 0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 x1 X01n x2 0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 x1 X01n x2 0.45 0.4 0.35 0.3 0.25 0.2 0.38 0.39 Ke1=100000 Be1=1.0 b=5 σ=1 0.4 0.41 0.42
Fig. 9 The results reported in (Guan, 1995)
VII. CONCLUSIONS
In this research, the problems of how to teach a robot to execute skilled operations are studied. The method of transferring human skills to robot opera-tions is different from those proposed in the literature. Human workers usually accumulate their experience after executing the same task repetitively. Thus, in this work, we proposed an evolutionary-based sys-tem to extract knowledge for robotic deburring tasks through virtual training. This learning scheme has been successfully applied in finding ways of adjust-ing the parameters of impedance controllers required in deburring operations. Thus, the main focus of this paper is the idea of the proposed evolutionary-based virtual training scheme. Another focus is to trans-form the experience for skilled operations into
S. F. Su et al.: Evolutionary-Based Virtual Training in Extracting Fuzzy Knowledge for Deburring Tasks 201
parameters in fuzzy systems. Such a numerical ap-proach makes experience accumulation possible. From simulation, it is evident that our approach shows much better performance than previous work (Guan, 1995). We believe that the proposed mechanism can be used in training any skilled operations performed by robots.
ACKNOWLEDGMENTS
This work was supported in part by the National Science Council of Taiwan under Grand NSC 89-2213-E-011-066.
NOMENCLATURE
Api the fuzzy labels for the error on the x1 axis
Bd the damping matrices in the Cartesian space
Fext the external force caused by the
environ-ment
G(q) the gravity loading force vector
H(q) the inertial acceleration-related symmetric matrix
J the Jacobian matrix
Kd the stiffness matrices in the Cartesian space
Md the inertial matrices in the Cartesian space ∆P the variable of the increment for the
param-eter P
q the vector of the joint variables
V(q, q ) the nonlinear Coriolis and centrifugal vec-tor
Vpi the fuzzy labels for the speed on the x2 axis
X the end-effector’s position vector in the Cartesian space
Xd the goal position vector in the Cartesian
space
ττact the generalized torque vector applied at
joints
θi the incremental value assigned by a fuzzy
rule
REFERENCES
Asada, H., Kosuge, K., and Fukuda, T., 1991, “Ac-quisition of Human Skills for Robotic Systems,”
IEEE International Symposium on Intelligent Control, Arlington, VA, USA, pp. 469-474.
Asada, H., and Liu, S., 1991a, “Transfer of Human Skills to Neural Net Robot Controllers,” IEEE
International Conference on Robotics and Auto-mation, Sacramento, CA, USA, pp. 2442-2448.
Asada, H., and Liu, S., 1991b, “Adaptive Control of Deburring Robots Based on Human Skill,” IEEE
International Conference on Decision and Con-trol, Brighton, UK, pp. 348-353.
A s a d a , H . , a n d L i u , S . , 1 9 9 3 , “ T e a c h i n g a n d Learning of Deburring Robots Using Neural Net-works,” IEEE International Conference on
Ro-botics and Automation, Atlanta, GA, USA, pp.
339-345.
Asada, H., and Yang, B. H., 1992, “Hybrid Linguis-tic/Numeric Control of Deburring Robots Based on Human Skills,” IEEE International Conference
on Robotics and Automation, Nice, France, pp.
1467-1474.
B ä c k , T . , H a m m e l , U . , a n d S c h w e f e l , H . P . , 1997, “Evolutionary Computation: Comments on the History and Current State,” IEEE
Transac-tions On Evolutionary Computation, Vol. 1, No.
1, pp. 1-17.
Bone, G. M., and Elbestawi, M. A., 1994, “Sensing a n d C o n t r o l f o r A u t o m a t e d R o b o t i c E d g e
Fig. 11 The results of using the obtained rules from workpiece 2 for workpiece 1 (max=3000 points) with score 38.259 Fig. 10 The results of using the obtained rules from workpiece 1
for workpiece 2 (max=3000 points) with score 40.857 0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 x1 X01n x2 0.45 0.4 0.35 0.3 0.25 0.2 0.39 0.395 0.4 0.405 x1 X01n x2
Deburring,” IEEE Transactions on Industrial
Electronics, Vol. 41, No. 2, pp. 137-146.
Cao, Z., Kandel, A., and Li, L., 1990, “A New Model of Fuzzy Reasoning,” Fuzzy Sets and Systems, Vol. 36, pp. 311-325.
Chen, G.-Y., 1998, “On the Study of the Learning Performance for Neural Networks and Neural Fuzzy Networks,” Master Thesis, Department of Electrical Engineering, National Taiwan Univer-sity of Science and Technology, Taiwan, R.O.C. Fu, K. S., Gonzalez, R. C., and Lee, C. S. G., 1989,
Robotics: Control, Sensing, Vision, and Intel-ligence, McGraw-Hill Book Company, New
York, USA.
Fukuda, T., and Shimojima, K., 1995, “Fusion of Fuzzy, NN, GA to the Intelligent Robotics,”
Pro-ceedings of the IEEE International Conference on Systems, Man, and Cybernatics, Vancouver,
BC, Canada, pp. 2892-2897.
Goldberg, D. A., 1989, Genetic Algorithms in Search,
Optimization, and Machine Learning,
Addision-Wesley, Reading, MA, USA.
Guan, C. P., 1995, “An Intelligent Man-Machine In-terface for Human Skill Transfer in a Virtual Compliant Environment,” Master Thesis, Depart-ment of Control Enggineering, National Chiao-Tung University, Taiwan, R.O.C.
Hashimoto, H., Harashima, F., and Daehee, K., 1995, “Path Generation for Mobile Robot Navi-gation Using Genetic Algorithm,” IEEE IECON
21st International Conference on Industrial Elec-tronics, Control, and Instrumentation, Orlando,
FL, USA, pp. 167-172.
Hogan, N., 1985, “Impedance Control: An Approach to Manipulation: Part I-Theory, Part II-Implemen-tation, Part III— Applications,” Journal of
Dy-namics Systems, Measurement, and Control, Vol.
107, pp. 1-24.
Hogan, N., 1987, “Stable Execution of Contact Tasks Using Impedance Control,” Proceedings of the
IEEE International Conference on Robotics and Automation, NC, USA, pp. 1047-1053.
Hogan, N., 1988, “On the Stability of Manipulators Performing Contact Tasks,” IEEE Journal of
Ro-botics and Automation, Vol. 4, No. 6, pp.
677-686.
Holland, J., 1975, Adaptation in Natural and
Artifi-cial Systems, University of Michigan Press, MI,
USA.
Horng, T. J., 1996, “An Intelligent Human-Machine Interface for Robot/VR Integration,” Master
Thesis, Department of Control Engineering,
Na-tional Chiao-Tung University, Taiwan, R.O.C. Ishibuchi, H., Nozaki, K., Yamamoto, N., and Tanaka,
H., 1995, “Selecting Fuzzy If-Then Rules for Classification Problems Using Genetic
Algorithms,” IEEE Transactions on Fuzzy
Sys-tems, Vol. 3, No. 3, pp. 260-270.
Jang, J. S. R., Sun, C.-T., and Mizutani, E., 1997,
Neuro-Fuzzy and Soft Computing: A Computa-tional Approach to Learning and Machine Intel-ligence, Prentice-Hall, Upper Saddle River, NJ,
USA.
Juang, C. F., and Lin, C. T., 1998, “An On-Line Self-Constructing Neural Fuzzy Inference Network and Its Applications,” IEEE Transactions on
Fuzzy Systems, Vol. 6, No. 1, pp. 12-32.
Kazerooni, H., and Her, M. G., 1991, “Automated Ro-botic Deburring of Parts Using Compliance Control,” Journal of Dynamics Systems,
Measure-ment, and Control, Vol. 113, pp. 60-66.
Kazerooni, H., Houpt, P. K., and Sheridan, T. B., 1986, “Robust Compliant Motion for Manipu-lators, Part I, II,” IEEE Journal of Robotics and
Automation, Vol. 2, No. 2, pp. 83-105.
Kim, W. J., Ko, J. H., and Chung, M. J., 1994, “Un-certain Robot Environment Modelling Using Fuzzy Numbers,” Fuzzy Sets and Systems, Vol. 61, pp. 53-62.
Kuan, C. P., and Young, K. Y., 1998, “Reinforcement Learning and Robust Control for Robot Compli-ance Tasks,” Journal of Intelligent and Robotic
Systems, Vol. 23, pp. 165-182.
Lin, C. T., and Lee, C. S. G., 1996, Neural Fuzzy
System: A Neuro - Fuzzy Synergism to Intelligent Systems, Prentice-Hall, Upper Saddle River, NJ,
USA.
Park, D., Kandel, A., and Langholz, G., 1994, “Ge-netic-Based New Fuzzy Reasoning Models with Application to Fuzzy Control,” IEEE
Transac-tions on Systems, Man, and Cybernatics, Vol. 24,
No. 1, pp. 39-47.
Parker, J. K., Khoogar, A. R., and Goldberg, D. E., 1989, “Inverse Kinematics of Redundant Robots Using Genetic Algorithms,” Proceedings of the
IEEE International Conference on Robotics and Automation, AZ, USA , pp. 271-276.
Shibata, T., and Fukuda, T., 1993, “Intelligent Mo-tion Planning by Genetic Algorithm with Fuzzy Critic,” IEEE International Symposium on
Intel-ligent Control, IL, USA , pp. 565-570.
Takagi, T., and Sugeno, M., 1985, “Fuzzy Identifica-tion of Systems and Its ApplicaIdentifica-tions to Modeling and Control,” IEEE Transactions on Systems,
Man, and Cybernetics, Vol. 15, No. 1, pp.
119-132.
Zadeh, L. A., 1965, “Fuzzy Sets,” Information
Con-trol, Vol. 8, pp. 338-353.
Manuscript Received: Sep. 10, 2002 Revision Received: Mar. 05, 2003 and Accepted: Apr. 18, 2003