國
立
交
通
大
學
機械工程學系
碩士論文
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
The Design and Characteristic Research of a Fast 3-dimensional
Nano-positioner
研 究 生:王佑麒
指導教授:洪紹剛 博士
中華民國 九十九年 六月
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
The Design and Characteristic Research of a Fast 3-dimensional
Nano-positioner
研 究 生:王佑麒
Student:Yu-Chi Wang
指導教授:洪紹剛 博士
Advisor:Dr. Shao-Kang Hung
國 立 交 通 大 學 機 械 工 程 學 系
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Mechanical Engineering
June 2010
Hsinchu, Taiwan, Republic of China
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
快速三維奈米定位器之設計與特性研究
學生:王佑麒
指導教授:洪紹剛
國立交通大學機械工程學系﹙研究所﹚碩士班
摘要
本論文介紹了三自由度運動的“平行細柱群”導引和多致動器並聯機構之機械設計 方法,並使多致動器並聯機構被用於奈米定位器的平面運動。本研究之三維奈米定位器 具有高定位精度、緊密性,以及較低的製造成本等多項優點。其應用範圍如掃描探針顯 微鏡、超精密加工及光學工程等。 “平行細柱群”的機構設計上我們利用了有限元素法分析。組裝完成之奈米定位器系 統透過了一系列的實驗,展現了系統性能。奈米定位器在 X 軸向、Y軸向與 Z 軸向的 掃描範圍都是 5µm。此外,在 X 軸向與 Z 軸向的解析度為 11nm (rms)、在 Y 軸向的解 析度為 13nm (rms),其最大工作頻率為 150Hz。The Design and Characteristic Research of a Fast 3-dimensional
Nano-positioner
student:Yu-Chi Wang
Advisors:Shao-Kang Hung, Ph.D.
Department﹙Institute﹚of Mechanical Engineering
National Chiao Tung University
ABSTRACT
This thesis presents a mechanical design method of “thin column group” guidance and multi-actuator parallel mechanism for a three degree-of-freedom translational nano-positioner. Multi-actuator parallel mechanism is utilized to implement planar motions which are general requirements for nano-positioners. The three-dimensional nano-positioner has several advantages such as high-precision, compactness, and low-cost. This nano-positioner can be applied to scanning probe microscopy, ultra-precision machining, and optical engineering.
The critical dimensions of “thin column group” are designed by the assistance of finite element analysis. The nano-positioner system is built up and tested successfully by a series of experiments. The traveling range of this nano-positioner is 5 µm in the X-, Y-directions as well as in the Z-direction. Also, the resolution of this nano-positioner is 11 nm (rms) in the X-, Z-directions and 13 nm (rms) in the Y-direction. Its maximum working frequency is 150 Hz.
致
致
致
致謝
謝
謝
謝
研究所兩年的訓練,首先要感謝 洪紹剛 博士指導,他總是不厭其煩
的指導我們,跟我們討論進度,也指點我們研究專題的方向與目標,每次
和老師做研究進度的討論,讓我的研究更完善,這也是完成我的研究的主
要助力。
感謝口試委員 徐文祥 博士與 陳美勇 博士於百忙之中抽空前來指
導,並對本論文提供寶貴的建議與指正,使本論文更趨於完善,在此深致
謝意。
此外,在研究期間還要感謝所有精密機電工程實驗室的成員,同學建
宇、日韋、彥菘,學弟喬華、盧奕、立岡、杰緯在課業上相互切磋及生活
上的相互鼓勵,在此致上萬分的謝意。
再來要感謝女友亞欣不斷的從旁支持與鼓勵,使我總是充滿信心能夠
面對挫折與挑戰,並且和我一起分享每一段成就與喜悅,讓我在大學與研
究所的生涯顯得多采多姿。
最深厚的感謝與祝福要獻給我的父母,感謝他們對我的栽培與養育之
恩,並給了我最好的生活環境,使我能夠無憂無慮的從事研究工作,我的
父母也是我最堅強的堡壘,僅以這本論文所帶來的成果獻給我最愛的父母
與家人。
王佑麒
精密機電工程實驗室
目錄
目錄
目錄
目錄
中文摘要
中文摘要
中文摘要
中文摘要 ... i
英文摘要
英文摘要
英文摘要
英文摘要 ... ii
致謝
致謝
致謝
致謝 ... iii
目錄
目錄
目錄
目錄 ...I
圖目錄
圖目錄
圖目錄
圖目錄 ...III
表目錄
表目錄
表目錄
表目錄 ... IV
一
一
一
一、
、
、
、
緖論
緖論 ... 1
緖論
緖論
1.1
研究背景與動機
研究背景與動機 ...1
研究背景與動機
研究背景與動機
1.2
文獻回顧
文獻回顧 ...1
文獻回顧
文獻回顧
1.3
研究目標
研究目標 ...9
研究目標
研究目標
1.4
論文結
論文結構與研究主題流程
論文結
論文結
構與研究主題流程
構與研究主題流程
構與研究主題流程 ...9
二
二
二
二、
、
、
、
定位器組成元件與原理
定位器組成元件與原理 ... 11
定位器組成元件與原理
定位器組成元件與原理
2.1
壓電致動器
壓電致動器 ...12
壓電致動器
壓電致動器
2.1.1
壓電效應
壓電效應... 14
壓電效應
壓電效應
2.1.2
磁滯現象
磁滯現象... 16
磁滯現象
磁滯現象
2.1.3
潛變
潛變(creep)... 16
潛變
潛變
2.1.4
壓電材料組成律
壓電材料組成律... 17
壓電材料組成律
壓電材料組成律
2.1.5
壓電特性參數
壓電特性參數... 20
壓電特性參數
壓電特性參數
2.2
導引機構
導引機構 ...22
導引機構
導引機構
三
三
三
三、
、
、
、
奈米定位器設計
奈米定位器設計 ... 24
奈米定位器設計
奈米定位器設計
3.1
3.1
3.1
3.1
平行細柱群導引機構
平行細柱群導引機構 ...24
平行細柱群導引機構
平行細柱群導引機構
3.2
3.2
3.2
3.2
有限元素輔助設計
有限元素輔助設計 ...25
有限元素輔助設計
有限元素輔助設計
3.2.1
有限元素法簡介
有限元素法簡介... 25
有限元素法簡介
有限元素法簡介
3.2.2
以
以 ANSYS 分析
以
以
分析
分析
分析「
「平行細柱群
「
「
平行細柱群
平行細柱群
平行細柱群」
」
」
」 ... 27
3.2.3
「
「平行細柱群
「
「
平行細柱群
平行細柱群」
平行細柱群
」
」
」機構設計
機構設計
機構設計
機構設計... 33
3.3
3.3
3.3
3.3
系統整合
系統整合 ...41
系統整合
系統整合
3.3.1
控制軟體
控制軟體(MATLAB/Simulink)... 42
控制軟體
控制軟體
3.3.2
資料擷取卡
資料擷取卡... 43
資料擷取卡
資料擷取卡
3.3.3
Real-Time Workshop... 45
3.3.4
控制器設計
控制器設計... 45
控制器設計
控制器設計
四
四
四
四、
、
、
、
實驗
實驗 ... 47
實驗
實驗
4.1
量測流程與設備
量測流程與設備 ...47
量測流程與設備
量測流程與設備
4.2
-30V~30V 驅動電壓
驅動電壓
驅動電壓...48
驅動電壓
4.2.1
大範圍步階響應測試
大範圍步階響應測試... 48
大範圍步階響應測試
大範圍步階響應測試
4.2.2
連續小步階響應測試
連續小步階響應測試... 51
連續小步階響應測試
連續小步階響應測試
4.2.3
正弦波測試
正弦波測試... 51
正弦波測試
正弦波測試
4.2.4
三角波測試
三角波測試... 53
三角波測試
三角波測試
4.2.5
圓軌跡測試
圓軌跡測試... 54
圓軌跡測試
圓軌跡測試
4.2.6
螺旋軌跡測試
螺旋軌跡測試... 55
螺旋軌跡測試
螺旋軌跡測試
4.3
0V~150V 驅動電壓
驅動電壓
驅動電壓 ...56
驅動電壓
4.3.1
大範圍步階響應測試
大範圍步階響應測試... 56
大範圍步階響應測試
大範圍步階響應測試
4.3.2
連續小步階響應測試
連續小步階響應測試... 58
連續小步階響應測試
連續小步階響應測試
4.3.3
正弦波測試
正弦波測試... 58
正弦波測試
正弦波測試
4.3.4
三角波測試
三角波測試... 59
三角波測試
三角波測試
4.3.5
圓軌跡測試
圓軌跡測試... 60
圓軌跡測試
圓軌跡測試
4.3.6
螺旋軌跡測試
螺旋軌跡測試... 61
螺旋軌跡測試
螺旋軌跡測試
五
五
五
五、
、
、
、
結論與未來展望
結論與未來展望 ... 62
結論與未來展望
結論與未來展望
六
六
六
六、
、
、
、
參考文獻
參考文獻 ... 64
參考文獻
參考文獻
圖
圖
圖
圖目錄
目錄
目錄
目錄
圖 1- 1 微位移平台[6]... 3 圖 1- 2 微步進直線定位裝置實體圖(a)、(b)[7]... 3 圖 1- 3 蚇蠖運動機構運動原理[10]... 4 圖 1- 4 蚇蠖微系統示意圖 ... 4 圖 1- 5 蚇蠖平台運動流程圖 ... 5 圖 1- 6 Scire 與 Teague 將兩組槓桿機構轉換撓性結構實體[14] ... 6 圖 1- 7 XYθz 微定位平台[17-18] ... 6 圖 1- 8 x-y 精密微定位平台示意結構圖[19]... 7 圖 1- 9 Hansma 研究群在 2004 年使用 FEA 第一共振頻率模擬圖[20]... 7 圖 1- 10 壓電驅動撓性機構[21]... 7 圖 1- 11 平行薄板群為導引機構之奈米定位平台[22] ... 8 圖 1- 12 研究主題流程 ... 10 圖 2- 1 定位平台的組成元件 ... 11 圖 2- 2 壓電致動器的類型 ... 13 圖 2- 3 正壓電效應 ... 15 圖 2- 4 逆壓電效應 ... 15 圖 2- 5 壓電致動器磁滯曲線 ... 16 圖 2- 6 壓電致動器潛變現象 ... 17 圖 2- 7 壓電材料方向表示法 ... 19 圖 2- 8 X 與 Y 方向的平行薄板群示意圖[20, 22] ... 23 圖 3- 1 灰色為「平行細柱群」機構,綠色為壓電致動器... 24 圖 3- 2 新式三軸奈米定位器的 3D 模型圖... 25 圖 3- 3 奈米定位器之(a)SolidWorks 模型及(b)實體照片... 25 圖 3- 4 壓電致動器(PSt 150) ... 27 圖 3- 5 ANSYS 模型分析圖 ... 29 圖 3- 6 微定位平台網格建立圖 ... 31 圖 3- 7 邊界條件設定圖 ... 32 圖 3- 8 細柱群尺寸代號圖 ... 34 圖 3- 9 機構設計分析後之 x 向應力圖... 37 圖 3- 10 機構設計分析後之y向應力圖... 37 圖 3- 11 機構設計分析後之z向應力圖... 38 圖 3- 12 機構設計分析後之x向應變圖... 38 圖 3- 13 機構設計分析後之 y 向應變圖... 39 圖 3- 14 機構設計分析後之 z 向應變圖... 39 圖 3- 15 單軸施加正負 30V 之平台位移圖... 40 圖 3- 16 雙軸施加正負 30V 之平台位移圖... 40 圖 3- 17 Z 軸施加 30V 之平台位移圖 ... 41 圖 3- 18 實驗儀器量測架設圖 ... 42 圖 3- 19 NI PCIe-6259 資料擷取卡與外接式端子台 ... 44 圖 3- 20 訊號控制及紀錄 ... 45 圖 4- 1 快速三維奈米定位器實體圖... 47 圖 4- 2 三維奈米定位器量測流程圖... 48 圖 4- 3 X 軸大範圍步階響應測試,(a)X 軸狀態,(b)圖 4-3(a)穩定以後的解析度約為 11nm (rms),(c)上升 時間約為 10ms。 ... 49 圖 4- 4 Y 軸大範圍步階響應測試,(a)Y 軸狀態,(b)圖 4-4(a)穩定以後的解析度約為 22nm (rms),(c)上升 時間約為 10ms。 ... 50 圖 4- 5 Z 軸大範圍步階響應測試,(a)Z 軸狀態,(b)圖 4-4(a)穩定以後的解析度約為 11nm (rms),(c)上升 時間約為 2.5ms。 ... 50 圖 4- 6 (a)X 軸連續小步階響應,(b)Y 軸連續小步階響應。 ... 51 圖 4- 7 X 軸正弦波各種頻率追蹤響應圖, (a)1Hz、(b)5Hz、(c)10Hz、(d)30Hz、(e)60Hz、(f)100Hz、 (g)130Hz、(h)140Hz、(i)150Hz。 ... 52圖 4- 8 Y 軸正弦波各種頻率追蹤響應圖, (a)1Hz、(b)5Hz、(c)10Hz、(d)30Hz、(e)60Hz、(f)100Hz、 (g)130Hz、(h)140Hz、(i)150Hz。 ... 52 圖 4- 9 X 軸三角波各種頻率追蹤響應圖, (a)1Hz、(b)5Hz、(c)10Hz、(d)30Hz、(e)60Hz、(f)100Hz、 (g)130Hz、(h)140Hz、(i)150Hz。 ... 53 圖 4- 10 Y 軸三角波各種頻率追蹤響應圖, (a)1Hz、(b)5Hz、(c)10Hz、(d)30Hz、(e)60Hz、(f)100Hz、 (g)130Hz、(h)140Hz、(i)150Hz。 ... 54 圖 4- 11 圓軌跡測試圖(a)1Hz、(b)10Hz。 ... 55 圖 4- 12 螺旋軌跡測試圖(a)1Hz、(b)10Hz。 ... 55 圖 4- 13 X 軸大範圍步階響應測試,(a)X 軸狀態,(b)圖 4-13(a)穩定以後的解析度約為 11nm (rms),(c) 上升時間約為 5ms。 ... 57 圖 4- 14 Y 軸大範圍步階響應測試,(a)Y 軸狀態,(b)圖 4-4(a)穩定以後的解析度約為 13nm (rms),(c)上 升時間約為 5ms。 ... 57 圖 4- 15 (a)X 軸連續小步階響應,(b)Y 軸連續小步階響應。 ... 58 圖 4- 16 X軸正弦波各種頻率追蹤響應圖,(a)1Hz、(b)5Hz、(c)10Hz ... 59 圖 4- 17 Y 軸正弦波各種頻率追蹤響應圖,(a)1Hz、(b)5Hz、(c)10Hz... 59 圖 4- 18 X 軸三角波各種頻率追蹤響應圖,(a)1Hz、(b)5Hz、(c)10Hz。... 60 圖 4- 19 Y軸三角波各種頻率追蹤響應圖,(a)1Hz、(b)5Hz、(c)10Hz。... 60 圖 4- 20 圓軌跡測試圖(a)1Hz、(b)10Hz。 ... 61 圖 4- 21 螺旋軌跡測試圖(a)1Hz、(b)10Hz。 ... 61
表目錄
表目錄
表目錄
表目錄
表 1- 1 三類壓電致動平台優缺點比較... 8 表 3- 1 設計參數設定範圍表 ... 35 表 3- 2 T6-6061 特性表... 35 表 3- 3 分析後的各個尺寸值 ... 36 表 3- 4 PID 參數與系統時域性能指標之間的關係[30-31] ... 46一
一
一
一、
、
、
、
緖論
緖論
緖論
緖論
1.1
研究背景與動機
研究背景與動機
研究背景與動機
研究背景與動機
近幾年來,由於科技不斷的進步,許多科技產業都陸續的朝著精密化及微小化的趨 勢發展,機械產業自然也是如此。傳統的舊式機械設備其在驅動上所使用到的致動器大 多為氣壓、液壓致動器或是其他各類的馬達,但是這些驅動器由於其結構特性的關係, 大都很難達到我們所需求的微小化。就奈米定位器而言,其控制致動器之精準度需要相 當高,傳統的致動器完全無法符合需求,因此一般奈米定位器的致動器常使用壓電式致 動器(piezoelectric actuator),壓電式致動器具有下列優點:體積小精度高、反應速率快、 機電轉換效率高、位移解析度大、熱膨脹補償很小、產生推力大、不會產生電磁訊號干 擾。 奈米定位器被廣泛使用在顯微術、精密量測、微加工,微操控等領域,其中一種重 要的應用便是原子力顯微術[1]。原子力顯微術利用微懸臂探針靠近樣品表面,當探針與 樣品接近時,針尖與樣品作用力使探針產生偏移,雷射光被反射至光感測器,經過放大 電路轉成電壓訊號後,利用回饋電路,使作用力在掃描過程中維持固定,而記錄掃描器 垂直軸在掃描過程中的變化,便可得到樣品表面型貌。1.2
文獻回顧
文獻回顧
文獻回顧
文獻回顧
奈米定位平台有許多種驅動與進給方式,利用不同進給方式,可以使得平台達到的 定位行程和解析度有所不同。目前奈米定位平台的驅動方式有壓電致動器驅動、磁力驅動、摩擦驅動…等,其中壓電致動器因為具有發熱少、機電轉換效率高、體積小等優點, 所以較常被使用在奈米定位平台上。目前對於以壓電致動器驅動之奈米定位平台,主要 分為三大類型,分別為:(1)利用摩擦滯滑現象的摩擦驅動平台、(2)利用夾持力的蚇蠖 (Inchworm)式平台、(3)利用撓性結構的材料彈性變形原理的形變式定位平台。 在摩擦驅動平台方面,1987 年 Matey[2]等人利用雙層壓電晶片之壓電材料組成的結 構體設計出 X-Y-Z 三軸之精密定位機構,其變形量為 0.3V/µm,三軸的運動範圍均為 ±60µm。同年 Pohl[3]利用慣性力與摩擦力搭配合的原理設計出解析度 0.04~0.2µm,速度 0.2mm/s 的長行程直線壓電驅動位移平台,其驅動力來自底面機構。1988 年 Niedermann[4] 利用壓電薄板於施加電壓下產生材料剪力變形的方式來作為致動器,並採以滯滑摩擦原 理方式驅動平台移動,而使定位平台可達 10nm 之步進解析度,速度為 0.4mm/s。1990 年 Renner[5]等亦利用慣性力與摩擦力搭配合的原理,使用擺線波形之輸入電壓驅動壓 電致動器,發展出解析度為 3nm、速度為 0.2mm/s 之垂直定位機構。1998 年 Chang 和 Li[6]將傳統 Scott-Russell 直線機構轉換應用於微步進直線定位裝置的設計上,並利用滯 滑摩擦原理,經訊號控制後使 V-groove 上的滑塊具有 0.05~120µm 步階大小的移動能 力,其全行程有 100µm 並可達到 0.04µm 的定位解析度,如圖 1-1 所示。2006 年 Chu[7] 利用所研製之微步進直線定位裝置具有高倍率放大位移輸出與極小角度偏差量之特 性,搭配滯滑摩擦效應驅動平台,利用精密圓棒作為直線導引,以步進運動模式做長行 程無位移範圍限制的移動。使其於步進運動模式下可於 70nm~35µm 的步階大小範圍內 驅動平台做長行程的精密定位,而於掃描運動模式下,平台可於 50µm 的範圍內做掃描, 並具有 10nm 的最小位移解析度,如圖 1-2(a)、(b)。
圖 1- 1 微位移平台[6] (a) (b) 圖 1- 2 微步進直線定位裝置實體圖(a)、(b)[7] 在蚇蠖式的定位平台方面,1985 年 Mamin[8]等屬於壓電致動蚇蠖式定位平台方 面,利用雙層壓電晶片壓電陶瓷致動器的變形,配合具有靜電吸引力的腳座,設計出單 步位移 25~400nm 之二軸長行程奈米定位機構,其定位速度最快可達 40µm/s。1996 年 Aoyama[9]設計一組具有模組化結構的微小機械人,其運動方式主要是以蚇蠖運動進行 各式定位運動。1997 年 Shamoto 與 Moriwaki[10]設計一組由壓電致動器所製作的蚇蠖運 動機構,其最小可辨析步階能力約為 5nm、反應時間為 5nm/ms,圖 1-3 為該蚇蠖運動 機構原理。2000 年,Cusin[11]等以 Inchworm 摩擦致滑原理製作單軸精密定位平台,利 用微機電製程加工,其行程可達 4 mm,解析度可達 40nm,最大速度為 300µm/s。Shutov 與 Howard[12]等人於 2003 年時利用靜電力推動的方式來取代了壓電致動器作蚇蠖運 動,經過實驗驗證,此種方式之定位平台最大大行程可達 50 mm 以上,所能達到之定
位精度為 0.05µm,圖 1-4 為蚇蠖運動平台的示意圖。隔年,在 Tenzer 與 Mrad[13]的研 究中,針對蚇蠖式定位平台的設計提出一完整的平台設計流程,此研究所得定位平台速 度可達 8 mm/s,最高速可達 20mm/s,圖 1-5 為蚇蠖平台的運動流程圖。
圖 1- 3 蚇蠖運動機構運動原理[10]
圖 1- 5 蚇蠖平台運動流程圖 在形變式定位平台方面,1978 年,Scire 與 Teague[14]利用槓桿原理,將兩組槓桿 機構轉換為撓性結構,使壓電致動器行程放大 30.3 倍,具有 50µm 的行程,但須使用 1000V 之驅動電壓,使用上並不方便,其實體圖如圖 1-6。1991 年 Dudnikov[15]等利用 壓電元件變形加上具有電磁力的腳座,設計出具有 0.05µm 定位精度、200mm 行程、4mm/s 速度之高精度 XYθz 定位機構。1994 年 Smith[16]等使用壓電元件產生一脈衝力來驅動 平台,發展出兩軸高精密定位機構,解析度為 10nm。1997 年 Ryu[17]等成功開發出一 XYθz 奈米定位平台,其採用複合槓桿機構設計出一致動器,將此致動器相隔 120°配置 而完成此三軸定位平台設計,其總位移行程 x、y 軸分別達 41.5µm 及 47.8µm,如圖 1-7。 1999 年 Ryu 和 Lee[18]等人,設計類似之三自由度奈米定位平台,但利用復合撓性鉸鍊 增加壓電致動器的致動量,使用逆向運動學的模型來操控此奈米定位平台。1999 年 Gao[19]等在設計 XY 平台時採用兩階段放大的對稱性機構,如圖 1-8,經過靜態及動態 特性分析之後,可降低非線性的誤差產生,XY 方向分別可移動 45µm 及 40µm,最高位 移解析度分別為 20nm 和 18nm,共振頻率分別為 525Hz 及 558Hz。2004 年 Hansma[20] 研究群特別為高速化原子力顯微鏡所設計的壓電掃描器,它的速度比起一般市售商品化 的奈米定位器快得多,可以達到 85Hz 的線掃描率,若影像畫素為 250×250,相當於
0.34frame/s,但對於即時顯像(30frame/s)的目標仍有一段差距,圖 1-9 為 FEA 第一共 振頻率模擬圖。2005 年 Zettl[21]等人藉由壓電式致動器推動撓性機構,順從機構把直線 位移轉換成平面 x-y 致動。此類致動器具有大輸出力和小輸出位移的特性,固將之當作 為順從放大機構的輸入源,如此之結合設計可得到所謂的智慧型機構,如圖 1-10。2006 年 Hansma[22]研究群再為高速化原子力顯微鏡所設計的新型壓電掃描器,如圖 1-11,它 的速度比起 2004 年該研究團隊所設計的的奈米定位器增加了數十倍,若影像畫素為 256×256 可以達到 2060Hz 線掃描率,相當於 8frame/s。韓國的 Choi[23]等人於 2008 年 設計了一款利用積層式壓電材料作為驅動器的雙軸奈米定位平台,該平台的定位範圍為 30µm×30µm,定位穩定時間約略小於 6µs。 圖 1- 6 Scire 與 Teague 將兩組槓桿機構轉換撓性結構實體[14] 圖 1- 7 XYθz 微定位平台[17-18]
圖 1- 8 x-y 精密微定位平台示意結構圖[19]
圖 1- 9 Hansma 研究群在 2004 年使用 FEA 第一共振頻率模擬圖[20]
圖 1- 11 平行薄板群為導引機構之奈米定位平台[22] 綜觀上述三類以壓電致動器驅動之定位平台,在摩擦驅動平台中,雖然可以達到長 行程的效果,但是此方式對於摩擦力還沒有完整的模型可以使用,因此在操控上往往會 造成重複性不佳的情形;而蚇蠖式定位平台雖然也同樣可以達到長行程的效果,但是在 單軸方向的移動需要較多的致動器才能達成,這樣會使的控制困難且成本提高。因此, 本論文將著眼於利用材料彈性變形原理設計的形變式定位平台。所謂形變式的定位平台 係利用材料在彈性限度內,受到拉應力、剪應力與彎曲應力時材料會產生變形,當外力 去除後材料的變形可恢復至原狀。為了符合奈米操作平台的高運動解析度,因此本論文 將以形變式定位平台為主,利用此觀念並以壓電為致動器,設計出的三維奈米定位器。 結構 優點 缺點 摩擦驅動定位平台 結構簡單 摩擦力影響定位精度且操控重 複性不佳 蚇蠖式定位平台 定位行程較長 控制複雜且平台移動速度較慢 形變式定位平台 定位精度較高 可達到的最大行程較小
1.3
研究目標
研究目標
研究目標
研究目標
本論文的研究中,主要為嘗試設計並製作出一個快速化的三維奈米定位器。壓電材 料具有機電轉換能力,有著質量輕、體積小、反應快及產生力大等優點,因此由壓電材 料所做成的壓電致動器便成為此定位器所需致動器之理想選擇。1.4
論文結構與
論文結構與
論文結構與
論文結構與研究主題流程
研究主題流程
研究主題流程
研究主題流程
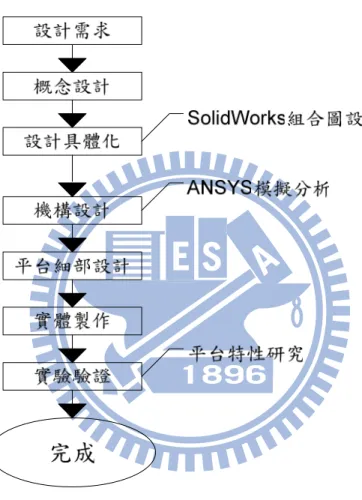
第一章 緒論 本章主要內容先由研究的動機與預期之目的著手,搜集國內外相關文獻研究,並進 一步構思相關的研究方法,最後說明本論文之架構。 第二章 定位器組成元件與原理 將定位平台所使用到的各種元件,分成五個部份,分別介紹其特性與原理。 第三章 奈米定位器設計 將奈米定位器中最重要的傳動暨導引元件(平行細柱群),利用 ANSYS 模擬軟體進 行微定位平台最佳化分析。 第四章 實驗 經由分析所得到的最佳化尺寸並加工完成後,以閉迴路控制系統及雷射位移感測器 測試平台特性,並測試奈米定位平台的解析度與最大行程。第五章 結論與展望
最後本章說明研究之心得與結論,並提出一些未來可研究的方向與相關建議,以供 後續研究人員作參考依據。
二
二
二
二、
、
、 定位
、
定位
定位器
定位
器
器組成元件與原理
器
組成元件與原理
組成元件與原理
組成元件與原理
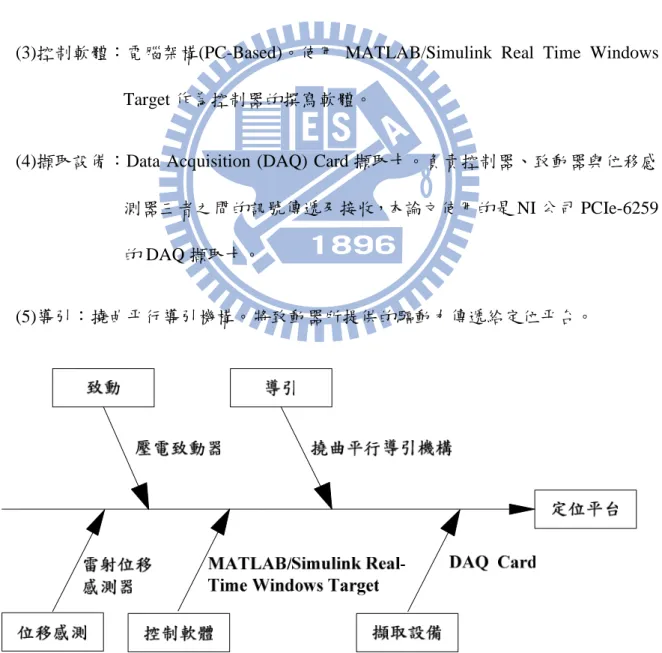
在本研究中,定位器所使用到的各種元件,可以分成如圖 2-1 所示的五個部份,其 各別的特性與原理將依續介紹於後面小節中。 (1)致動:壓電致動器,負責提供驅動力給定位平台。 (2)位移感測:KEYENCE 公司 LK-G5000 系列的雷射位移感測器。測量定位平台的 位移量。(3)控制軟體:電腦架構(PC-Based)。使用 MATLAB/Simulink Real Time Windows Target 作為控制器的撰寫軟體。
(4)擷取設備:Data Acquisition (DAQ) Card 擷取卡。負責控制器、致動器與位移感
測器三者之間的訊號傳遞及接收,本論文使用的是 NI 公司 PCIe-6259 的 DAQ 擷取卡。
(5)導引:撓曲平行導引機構。將致動器所提供的驅動力傳遞給定位平台。
2.1
壓電致動器
壓電致動器
壓電致動器
壓電致動器
壓電致動器[24-26]具有快速的頻率響應、可達到奈米級的高精度定位能力、高機電 轉換效率、尺寸小和做動時有較小的發熱等優點,而被廣泛地應用在奈米定位系統內, 但是壓電致動器的磁滯現象與較短的運動行程,會影響定位平台的性能。因此在高精密 產業中,一個具有高解析度的定位系統變得越來越重要,因為其能決定製程與加工的精 度。由於壓電致動器本身是由鐵電性材料所組成,這使的它在對應一個電場的回應過程 中基本上是呈現非線性的,也就是說在位移和輸入電場之間的存在一個非線性的磁滯效 應。 壓電材料之優點為體積小、生熱小、精度高、反應快,有極佳的解析度、機電轉換 效率高可以產生極大的力量及不會產生電磁訊號干擾。壓電材料之缺點為總位移量小、 脆性大、不能承受剪力、彎曲應力,耐水性差、有磁滯現象及電場/應變關係為非線性。 壓電致動器依照其應用,一般可粗略分成兩種類型:第一種類型為直線縱向運動 型:此種類型利用壓電元件的縱效應與橫效應所產生之單純線性位移,其作動可視為具 有微/奈米級微動能力之線性馬達,其構造包含單層元件、積層元件與管狀元件等,其 具有高剛性與軸向推力大的優點,壓電致動器大都使用此種元件。第二種類型為彎曲橫 向運動型:其可產生較大位移的複合彎曲位移,一般由壓電元件與其他彈性材料所組 成,其種類包含單層壓電晶片(unimorph)、雙層壓電晶片(bimorph)等,此種運動方式之 元件可產生較大的位移空間,多應用於超音波馬達。 單層型壓電元件之構造較為簡單,但是位移量非常小。一般單層型壓電元件其厚度 約在 0.1~1 mm 之間,產生之位移量約為 100 nm。單層型壓電元件之極化方向(P)為其厚度方向如圖 2-2(a),驅動方式是在壓電元件之厚度方向(T)施加電壓,使材料內部發生電 荷分極(polarization)或極化,因而產生長度方向(L)伸縮變形。 積層型壓電元件是由數個單層型壓電元件加以重疊所組成,每層間皆以薄膜絕緣, 一般層數由數十至數百層,故能夠得到比單層型壓電元件更大之位移量,位移量從數微 米增疊加到數十微米,自然頻率約在數 kHz 到數 10kHz。積層型壓電元件之構造如圖 2-2(b)所示,在每個單層型壓電元件之間以電極間隔,並使每個單層型壓電元件的極化 方向與相鄰的單層型壓電元件的極化方向各相差 180 度,因此在機械結構上雖屬於串聯 型式,但在電氣特性上是屬於並聯型式。其驅動方式是在每個單層型壓電元件同時施加 電壓,使其在極化方向產生位移變化。 雙層壓電晶片其組成方式,是將兩枚壓電晶片貼合。其驅動方式為一邊之壓電元件 伸長時,另一邊之壓電元件做相反之收縮動作,使整體產生彎曲位移之變形,如圖 2-1(c) 所示。 圖 2- 2 壓電致動器的類型
2.1.1
壓電效應
壓電效應
壓電效應
壓電效應
壓電效應(Piezoelectric Effect)[26]是在西元 1880 年由法國科學家皮爾居里(Pierre
Curie)與傑克斯居里(Jacques Curie)他們倆兄弟所發現的。他們在研究晶體一些現象 時,偶然發現某一特殊處理過的晶體在受到外界壓力時,它的表面會產生電荷,而且壓 力越大所產生的電荷就越多,這種現象便是「壓電效應」。 在此之後,西元 1881 年李普曼(G.Lippmann)在研究熱力學原理時,發現這種對 晶體施加壓力而使其表面產生電荷形成電極化的現象是可逆的,而在同一年,居里兄弟 做實驗證明了李普曼的這個發現。也就是當晶體放置於由外部所施予之電場時,其晶體 會產生形變的現象。 壓電性(piezoelectric)為一種機電能量互換的現象,其作用包括正壓電效應及逆壓電 效應兩種,分別描述如下: 正壓電效應 正壓電效應正壓電效應
正壓電效應(direct piezoelectric effect)
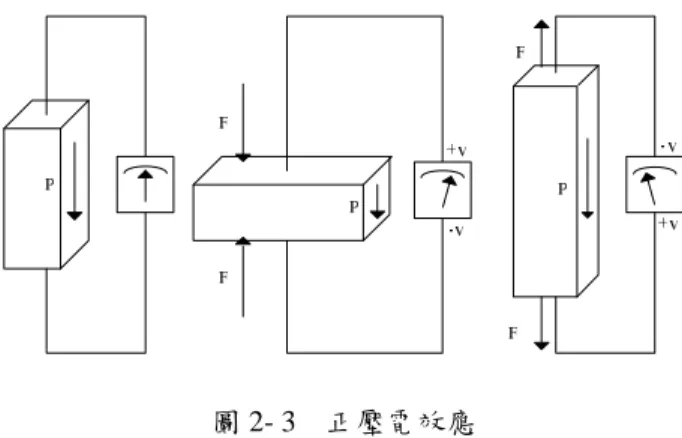
當陶瓷體極化後,其內部由電偶極矩同向排列形成的極化強度,在陶瓷體的一端會 出現正束縛電荷,另一端則出現負束縛電荷,在陶瓷體束縛電荷的作用下,將於電極面 上吸附一層來自外界的自由電荷。 如圖 2-3 所示,於陶瓷體上沿極化方向施一壓力 F,陶瓷體將出現壓縮變形,使得 正負束縛電荷間的距離縮短,極化強度減弱,於是原本吸附在電極面上來自外界的自由 電荷,將有一部份被釋放而產生放電的現象;壓力 F 去除後,又將重新充電,此種機械 能轉換成電能的現象稱為正壓電效應。
圖 2- 3 正壓電效應
逆壓電效應
逆壓電效應逆壓電效應
逆壓電效應(converse piezoelectric effect)
如圖 2-4 所示,於陶瓷體上加以與極化方向相同的電場,會使得極化強度增強,此 時陶瓷體將會沿著極化方向伸長變形;若是在陶瓷體上加以與極化方向相反的電場,則 極化強度減弱,因而造成反方向的形變。當輸入電場為交流電時,物體的形變方向會隨 著電場的正負週期做收縮與膨脹的交互變換,而當交流電場的頻率等於材料本身的自然 共振頻率時,其形變的幅度會達到最大。此種電能轉換成機械能的現象稱為逆壓電效應。 圖 2- 4 逆壓電效應
2.1.2
磁滯現象
磁滯現象
磁滯現象
磁滯現象
當操作電壓升高再慢慢降下時,壓電致動器的伸長量與電壓的關係曲線並非為線性 曲線,同時也不是同一條路徑,如圖 2-5 所示,此現象稱為磁滯現象(hysteresis)[24-25]。 而壓電致動器基本上是鐵電材料,當然無法避免遲滯現象的發生,而磁滯所造成的誤差 即可高達全行程的 10~15%。磁滯現象是壓電致動器控制上最令人困擾的問題,其消除 的方式通常是利用回授控制的方法加以補償。 圖 2- 5 壓電致動器磁滯曲線2.1.3
潛變
潛變(creep)
潛變
潛變
當驅動電壓達一定值固定不變後,壓電致動器內的極性會繼續增加或減少,因此即 使電壓沒有變化,壓電致動器的長度也會緩緩增加或減少,此現象稱為潛變[26],如圖 2-6 所示。而其長度與時間的關係式如(2.1)所示,其中 ∆L 表示壓電致動器的變化量,γ 表示壓電致動器的潛變因子,一般壓電致動器的潛變因子值約在 0.01~0.02 之間。 )) 1 . 0 (t/ log γ 1 ∆( ∆L(t)==== ++++ ×××× (2.1)圖 2- 6 壓電致動器潛變現象
2.1.4
壓電材
壓電材料組成律
壓電材
壓電材
料組成律
料組成律
料組成律
壓電性所涉及者為機械能與電能之間的互換,而所涉及的變數有四個,其中兩個為 機械彈性量,即應力應力應力(T)與應變應力 應變應變(S);而另外兩個為介電量,即電場應變 電場電場電場(E)與電位移電位移電位移電位移或電通量電通量電通量電通量 密度 密度密度 密度(D);這四個參數之間的關聯可以用壓電方程式[26]來表示,依所選擇變數的不同, 壓電方程式有四種不同的形式,分別為: εεεε ++++ ==== ++++ ==== E dT D dE T s S T E d 型態 (2.2) εεεε ++++ ==== ++++ ==== E eS D eE S c T S E e 型態 (2.3) ββββ ++++ −−−− ==== ++++ ==== D gT E gD T s S T D g 型態 (2.4) ββββ ++++ −−−− ==== −−−− ==== D hS E hD S c T S D h 型態 (2.5)其中 sE及 cE分別表示在定電場時的柔度(compliance)及剛度(s tiffness)常數。 sD及 cD分別表示在定位移時的柔度(compliance)及剛度(s tiffness)常數。 εT及 βT分別表示在定應力時的介電(permittivity)及反介電(impermeability)係數。 εS及 βS分別表示在定應變時的介電(permittivity)及反介電(impermeability)係數。 d,e,g 及 h 分別表示在不同邊界條件時的壓電參數。 以 d 型態作為例子,若不考慮熱效應及磁效應,並以電場、應力為獨立變數,則張 量形式的壓電組成律可寫成: k kj j E ij i s T d E S ==== ⋅⋅⋅⋅ ++++ ⋅⋅⋅⋅ (2.6) k T mk j j m m d T E D ==== ⋅⋅⋅⋅ ++++εεεε ⋅⋅⋅⋅ (2.7) k,m=1~3;i,j=1~6 其中 const E E T S s ==== ∂∂∂∂ ∂∂∂∂ ==== (compliance constant) const E const E T D E S d ==== ==== ∂∂∂∂ ∂∂∂∂ ==== ∂∂∂∂ ∂∂∂∂
==== (piezoelectric strain constant)
const T T E D ==== ∂∂∂∂ ∂∂∂∂ ==== εεεε (permittivity constant)
圖 2- 7 壓電材料方向表示法 張量下標如圖 2-7 所示,其中 1、2、3 各代表 X、Y、Z 軸方向,4 方向、5 方向、 6 方向分別表示 YZ 方向剪力、XZ 方向剪力及 YX 方向剪力。不同的獨立變數亦構成不 同的組成律,共有 4 組,並且其係數互相具有轉換關係,在此僅考慮壓電組成律的線性 關係,亦即在所有壓電方程式中,其係數均為常數(忽略磁滯現象的影響)。 由於壓電材料在晶體的結構上為具有對稱性的六角晶系,利用晶體結構的對稱性可 將材料常數簡化成 10 個獨立變數,通常極化方向為 Z 軸,其壓電組成律矩陣關係如下 (2.8): εεεε εεεε εεεε ==== 3 2 1 6 5 4 3 2 1 T 33 33 31 31 T 11 15 T 11 15 E 66 15 E 44 15 E 44 33 E 33 E 13 E 13 31 E 13 E 11 E 12 31 E 13 E 12 E 11 3 2 1 6 5 4 3 2 1 E E E T T T T T T 0 0 0 0 0 d d d 0 0 0 0 d 0 0 0 0 0 0 d 0 0 0 0 0 0 0 s 0 0 0 0 0 0 0 d 0 s 0 0 0 0 0 d 0 0 0 s 0 0 0 d 0 0 0 0 0 s s s d 0 0 0 0 0 s s s d 0 0 0 0 0 s s s D D D S S S S S S (2.8)
另外,本論文所設計的奈米定位器為三軸皆使用壓電致動器,故在模擬分析時亦需 要使用到 X 軸向為極化方向之壓電材料參數矩陣(2.9)及 Y 軸向為極化方向之壓電材料 參數矩陣(2.10)。 εεεε εεεε εεεε ==== 3 2 1 6 5 4 3 2 1 T 22 26 T 22 26 T 11 12 12 11 26 E 55 26 E 55 E 44 12 E 22 E 23 E 12 12 E 23 E 22 E 12 11 E 12 E 12 E 11 3 2 1 6 5 4 3 2 1 E E E T T T T T T 0 0 0 d 0 0 0 0 0 0 d 0 0 0 0 0 0 0 0 0 0 d d d 0 d 0 s 0 0 0 0 0 d 0 0 0 s 0 0 0 0 0 0 0 0 0 s 0 0 0 0 0 d 0 0 0 s s s 0 0 d 0 0 0 s s s 0 0 d 0 0 0 s s s D D D S S S S S S (2.9) εεεε εεεε εεεε ==== 3 2 1 6 5 4 3 2 1 T 33 14 T 22 23 22 23 T 33 14 14 E 66 E 55 14 E 66 23 E 33 E 23 E 13 22 E 23 E 22 E 23 23 E 13 E 23 E 33 3 2 1 6 5 4 3 2 1 E E E T T T T T T 0 0 d 0 0 0 0 0 0 0 0 0 0 d d d 0 0 0 0 d 0 0 0 d 0 0 s 0 0 0 0 0 0 0 0 0 s 0 0 0 0 0 0 d 0 0 s 0 0 0 0 d 0 0 0 0 s s s 0 d 0 0 0 0 s s s 0 d 0 0 0 0 s s s D D D S S S S S S (2.10)
2.1.5
壓電特性參數
壓電特性參數
壓電特性參數
壓電特性參數
機電耦合因數 機電耦合因數機電耦合因數機電耦合因數(electro-mechanical coupling factor, Kd)
機電偶合因數 Kd 表示了壓電陶瓷在共振時,機械能與電氣能之間的轉換率,其可定義 為機電耦合能量密度與機械能(或彈性能)密度及介電能密度幾何平均之比,也可以定義 為儲存的機械能(電能)與輸入總電能(機械能)比值的平方根。 U 機電耦合能量密度 機電耦合能量密度機電耦合能量密度 機電耦合能量密度
輸入的總電能 輸入的總電能輸入的總電能 輸入的總電能 儲存的機械能 儲存的機械能儲存的機械能 儲存的機械能 ==== d K (2.12) 輸入的總電能 輸入的總電能輸入的總電能 輸入的總電能 儲存的電能 儲存的電能 儲存的電能 儲存的電能 ==== d K (2.13) 此外,同一壓電材料之機電耦合因數並非為一定值,而是隨著所使用的振動模態 (vibration mode)及操作頻率而變的參數。一般而言,機電耦合因數越大代表該壓電材料 之壓電性越好。 機械品質因數 機械品質因數機械品質因數
機械品質因數(mechanical quality factor, Qm)
當壓電陶瓷作機械振動時,由於晶格的形變會造成陶瓷體內部磨擦而有能量的損 耗,機械品質因數就表示了壓電陶瓷體在共振時機械損耗的大小。機械品質因數(Qm)的 定義如下: 之能量 之能量 之能量 之能量 共振時每週期機械損失 共振時每週期機械損失共振時每週期機械損失 共振時每週期機械損失 共振時所儲存的機械能 共振時所儲存的機械能 共振時所儲存的機械能 共振時所儲存的機械能 ×××× ππππ ====2 Qm (2.14) 機械品質因數和震動模式有關,機械品質因數越低代表機械損耗越大。 介電常數 介電常數介電常數 介電常數(dieletric constant, εr) 其又稱為相對介電係數,其係壓電材料之電荷密度 qb與單純金屬層間電荷密度 qf 相對於單純金屬層間電荷密度qf之比,其定義為: ++++ ==== εεεε f f b r q q q (2.15)
其中 εr 為無因次之介電常數。相對介電常數 εr 越大,代表壓電材料的電容量
(C=ε0εrA0/d,ε0、A0、d 分別代表真空狀態下的介電率 8.854x10-12F/m、感應面積以及兩
金屬層間之距離)越大。
壓電應變常數
壓電應變常數壓電應變常數
壓電應變常數(piezoelectric strain constant, dij)
其定義為壓電材料在外加電場下,所產生的位移。該壓電應變常數係壓電材料於機 電耦合或結合時,一個重要的參考常數與特性。另外,壓電材料在相同方向施加電場時, 其壓電應變常數也會有所差異。壓電陶瓷與石英其壓電應變常數 d31=d32,壓電聚合物其 壓電應變常數 d31≠d32,其中壓電聚合物之壓電應變常數不等的因素來自於製造過程之輥 壓拉伸時所造成的。
2.2
導引機構
導引機構
導引機構
導引機構
要使定位平台在有限的運動範圍內達到精密定位,必須提供高精度的定位能力,平 行導引機構即為常常使用的方法之ㄧ。將外力施加在已知剛性的導引結構,達到控制微 小的運動位移,應用導引結構製做精密微動定位平台,其優點如下: (1) 動作平順且具連續性。 (2) 無磨耗且擁有高穩定性。 以上幾點克服了以往傳統機構所產生的磨擦與間隙問題,使得定位系統可達到奈米 級的定位精確度。此外,在設計時需考慮:(2) 機構之共振頻率, (3) 壓電材料所能推動之最大位移, (4) 結構本身所能承受之最大變形(位移量)。 在多自由度的定位器設計中,並聯式機構設計較串聯式快速,這是由於並聯式機構 中多組致動器可以直接對負載施力,但是串聯式中某軸的致動器必須背負其他軸的致動 器因此縮減了頻寬。 2007 年 Hansma[20, 22]研究群設計的新一代壓電掃描器採用了薄板簧片平行導引 (flexure guide)的方法,可以用線切割放電加工來實現。下圖 2-8,它在 XY 方向是並 聯式設計,背負著 Z 軸致動器為串聯式設計,如此一來 XY 方向的頻寬極可能會較 Z 方 向慢。在這個設計上,單就橫向的平行薄板群而言,在 X 方向剛性很高,可以傳遞 X 方向的致動器到可動件上貢獻 X 方向的位移;對縱向平行薄板群而言,他們在 X 方向 的剛性相對低得多,當 X 軸致動器運動時不會抵抗,而達到撓曲(deflection)對稱導引 的作用。此種設計方式利用了兩個致動器負責一軸的運動,也就是所謂的推拉對(push- pull pair),這樣的設計除了能抵銷部份的壓電磁滯現象,亦能加倍出力提高頻寬。 圖 2- 8 X 與 Y 方向的平行薄板群示意圖[20, 22]
三
三
三
三、
、
、
、 奈米定位器設計
奈米定位器設計
奈米定位器設計
奈米定位器設計
3.1
3.1
3.1
3.1
平行細柱群
平行細柱群
平行細柱群
平行細柱群導引機構
導引機構
導引機構
導引機構
為了達成 XYZ 三軸向皆為完全並聯式,「平行薄板群」[22](兩個方向高剛性,一 個方向低剛性)在此研究已不適用。所以我們需要一個方向是高剛性,兩個方向是低剛 性的「平行細柱群」機構,如圖 3-1。 圖 3- 1 灰色為「平行細柱群」機構,綠色為壓電致動器 由於「平行細柱群」機構在軸向屬於高剛性,當壓電致動器伸長時,可將致動器所 產生的位移給予右方的平台;但「平行細柱群」機構在另兩個垂直方向是屬於低剛性, 所以產生了類似撓曲導引的作用,此處的原理與「平行薄板群」機構的原理相似。 「平行細柱群」機構雖然具有了許多優點,但是其製造不易。由於需要做兩個方向 的線切割放電加工,因此需先製成「平行薄板群」,之後將薄板群轉 90 度再做ㄧ次線 切割放電加工製作成「平行細柱群」。圖 3-2 為利用上述概念設計出的新式奈米定位器, 其中綠色為壓電致動器、灰色為「平行細柱群」加位移平台。圖 3-3 為 SolidWorks 模型 及實體的比較圖。圖 3- 2 新式三軸奈米定位器的 3D 模型圖 圖 3- 3 奈米定位器之(a)SolidWorks 模型及(b)實體照片
3.2
3.2
3.2
3.2
有限元素輔助設計
有限元素輔助設計
有限元素輔助設計
有限元素輔助設計
3.2.1
有限元素法簡介
有限元素法簡介
有限元素法簡介
有限元素法簡介
有限元素法[27]是一個數值的程序,可以用來求解像是包含應力分析、振動分析等 廣泛的工程問題,有很多實際的工程問題我們無法獲得精確解,這種難以獲得解答可歸 因於複雜的統御微分方程式或是難以處理的邊界和初始條件,要處理這類的問題,只能 訴諸於數值解的近似值。與解析解做對比,解析解顯示系統內任一點精確的行為,它可 應用到各種的工程問題上以獲得解答。穩態、暫態、線性或非線性問題的應力分析等問 題,都可以用有限元素法來分析。 有限元素法的原理是將幾何形狀,如點、線、面、體積,切成好幾個區域,而每個 區域稱之為元素,元素和元素之間是用節點來連結,而外力除了壓力外,全都是施加在 節點上,每個節點上會有不同的自由度和作用力,將所有元素上的作用方程式聯立起 來,求出每個節點的變量解。 ㄧ般有限元素分析的流程大約可分成三部份:前處理(Pre-processing)、分析(Solution) 及後處理(Post-processing)。 前處理: 前處理是只創建實體模型以及有限元素模型。它包括創建實體模型、定義元素屬 性、劃分網格、修正模型等幾項內容。現今大部分的有限元素模型都是用實體模型建模, 例如 SolidWorks,ANSYS 以數學的方式表達結構的幾何形狀,然後在裡面劃分節點和 元素,還可以在幾何模型邊界上施加所需的負荷,但實體模型並不參予有限元素分析, 所以施加在幾何實體邊界上的負荷或拘束必須最終傳遞到有限元素模型上(節點)進行求 解。
首先需要確定分析的類型以及方式,接著就是施加負荷和邊界條件,之後就可以近 案例分析及求解。 有幾點是需要特別注意的: 1. 元素類型和材料性質參數的設定以及統一的單位系統。 2. 元素實常數和材料類型的設置、實體模型的質量特性。 3. 確保模型中不存在隙縫(特別是從 CAD 轉檔) 。 4. 集中載荷和體積載荷、面載荷的方向。 5. 溫度場的分布和範圍、熱膨脹分析的參考溫度。 後處理: 後處理是用來看分析出來的結果,可得位移、電壓、應力等資料。
3.2.2
以
以 ANSYS 分析
以
以
分析
分析
分析「
「平行細柱群
「
「
平行細柱群
平行細柱群
平行細柱群」
」
」
」
本文所使用的是 Piezomechanik 公司出產的積層式壓電陶瓷 PSt 150 / 5×5 / 20 為致 動器(圖 3-4),因此本研究以 ANSYS11 進行上述平行細柱群的結構模態分析時,亦須同 時針對壓電結構進行分析與比較。詳細 PSt 150 材料參數見附錄 A 圖 3- 4 壓電致動器(PSt 150)使用 ANSYS 11[27]模擬壓電材料有以下幾個步驟:1.元素選用,2.彈性係數設定, 3.密度設定,4.介電係數設定,5.壓電係數設定,任何一項參數設定錯誤都將影響到模擬 結果的正確性。 模擬壓電材料的元素有很多種類,包括 2D 的 PLANE13,3D 的 SOLID5、SOLID98 等,依照分析的項目選用適當之元素,如 PLANE13 適合用於能以 2D 型式表達的結構; SOLID5 為立方形元素,適合用於 3D 方形結構;SOLID98 為三角錐形具有邊節點之元 素,適合用於圓形結構。 壓電材料為線性非等向性材料,所輸入之材料彈性係數為 6×6 矩陣,彈性矩陣的 設定分為兩類:1.彈性韌性 s、2.彈性剛性 c,一般依照所選用之壓電參數來決定輸入之 彈性係數種類。當選用 d-type 壓電係數時,輸入彈性韌性 s,選擇 Flexibility form。當 選用 e-type 壓電係數時,輸入彈性剛性 c,選擇 Stiffness form。
壓電材料密度設定,一般壓電材料密度介於 7000~8000 kg/m3之間,本文選用之材 料密度為 8000 kg/m3 壓電材料介電係數設定,一般文獻中所提到的介電係數如圖 3-4 中提到的介電係數 5400 為 εT /ε0,須乘以真空介電係數 ε0 (8.854×10 -12 ),得到的 εT為軟體中所輸入的介電 係數。 由於本分析是選用以 d-型態的壓電方程式來定義壓電材料的各項係數,因此在作包 含壓電材料的分析時,須定義壓電材料性質的三個係數矩陣:6 ×6 的彈性係數矩陣[s]、 3×6 的壓電常數矩陣[d]、3×3 的介電常數矩陣[ε]。其中,壓電係數之選用可依分析項目 參考公式(2.8)、(2.9)、(2.10)選擇各項壓電參數。
前處理 前處理前處理 前處理 在前置處理器中可分四步驟來進行,分別為建模、參數設定、網格建立、邊界條件 設定。以下分別介紹各個步驟: 一、建模: 在 ANSYS 分析之前須先繪製出所設計的模型,因此以 3.1 章節所設計的機構圖為 主,利用 ANSYS 繪圖功能建構出分析圖,如圖 3-5 所示。 在建圖時,可利用 Preprocessor → Modeling 中的各項功能來編輯與修改圖形,而在 圖形的線架構上最好為連續的線段,可在 Preprocessor → Modeling → Operate →
Booleans 下做修改,如此在做網格建立時才能使網格平均的將面積做分割。
二、參數設定:
當圖形建構完成後便要對結構做各項的設定,共有兩項設定:元素型式(element
type)、材料性質(material properties)。
1.元素型式(element type):在本論文中模擬的「平行細柱群」結構屬於 3D,所以使
用之元素類型為 SOLID5 3-D Coupled-Field Solid;另外,壓電材料所使用的元素類型為
SOLID186 3-D 20-Node Structural Solid or Layered Solid。
2.材料性質(material properties):「平行細柱群」結構材料屬於等向性(isotropic),必 須定義楊氏係數 EX 值及浦松比 PRXY;另外,值得注意的是在彈性分析中,浦松比不 可設定為 0.5,因為這會使得結構體之剛性係數(bulk modulus)變成無限大,程式將無法 執行。塑性分析中則無此限制,因為塑性力學將材料視為不可壓縮,只能因剪力而變形。 在此我們將 EX 值設定為 7.1x1010,PRXY 設定為 0.33。而壓電材料所使用的參數參照 公式(2.8)、(2.9)、(2.10)。 三、網格建立: 在幾何模型建立完成後,即可進行模型的網格化,亦即將其離散化。在無誤差累積 的情況下,網格分的越細,所計算的結果誤差越小,但所需的分析時間越長。 對於複雜的結構,網格化後會產生重疊的節點,必須消除重疊或位置十分接近的節 點,以免產生不連續的元素以及奇異點(singularities),可使用 Merge 功能來消除之。還 要使用壓縮節點編號指令,來減少矩陣之主自由度(master degrees of freedom),以節省 計算時間。因為微定位平台變形較大的部份在「平行細柱群」,因此,在此處的網格將 細分得較細密,如圖 3-6 所示。
圖 3- 6 微定位平台網格建立圖 四、 邊界條件設定: 邊界條件設定包含施加拘束(constraints)或稱邊界條件(boundary conditions,BC)及負 載荷重(loads)之指令。拘束是定義一個結構體之固定條件;荷重可包含集中力、分布力、 加速度以及預存應變(pre-strain)等。例如,結構問題可定義位移邊界條件及受力,或熱 傳遞問題可定義邊界溫度或表面熱對流。另外,在線性問題中的多重負載狀況(multiple load cases)則可以分別定義,並於後置處理程序中以各種比例組合輸出結果。 設計上,奈米定位器分別將 X、Y、Z 三個方向的壓電材料固定邊界,另外再分別 依照需求對各個軸向的壓電材料施加適當的電壓,如下圖 3-7。
圖 3- 7 邊界條件設定圖
分析 分析分析 分析
當有限元素模型建立完成後,便可進入求解處理器(SOLU)。進入求解處理器之後接 著就該宣告分析的型態(ANTYPE, Analysis TYPE),而常用的分析型態如下:
1. ANTYPE=STATIC 或 0 時為靜態分析。
2. ANTYPE=BUCKLE 或 1 時為挫屈分析。
3. ANTYPE=MODAL 或 2 時為振動模態分析。
4. ANTYPE=HARMIC 或 3 時為調和外力動力系統分析。
當模型完成建構、負載定義完成、分析型態也已宣告時,接下來就可下達 SOLVE 指令開始解題,求解的過程包含電腦大量的計算,所以須要花費不少的時間,而過程中, 質量矩陣、剛度矩陣、負載等資料都會儲存在相關檔案中。 ANSYS 求解之結果內容,包含節點結果與元素結果,結果的輸出可寫入輸出檔案 (Output File),資料庫及結果檔(*.rst,*.rfl,*.rth,*.rmg)。在交談模式中,輸出檔案即 為將結果顯示於輸出視窗中,由於每個元素的結果相當多,系統自定是不將結果列於輸 出視窗中,否則當模組非常大時,要耗費相當多的顯示時間,但是可利用 OUTPR 指令, 設定顯示結果的內容於輸出視窗中。而將結果存入資料庫及結果檔,主要是用於後處理 器(POST1)中各種結果圖形之顯示,系統之自訂為全部結果存入該檔。 因為求解處理器已內定在靜態分析模式下了,所以直接選擇 Solve → Curent LS 求 解。 後處理 後處理後處理 後處理 後處理是指檢查分析的結果,這是分析中最重要的一環,因為可以搞清楚作用載荷 如何影響設計、元素劃分得好壞等。另外,後置處理器 POST1 是應用於靜力或穩態問 題方面的。 經求解處理器求解後,下一步則進行機構設計分析,找出合適的尺寸值,而後再由 後置處理器(POST1)顯示分析後的各個狀態情形。
3.2.3
「
「平行細柱群
「
「
平行細柱群
平行細柱群
平行細柱群」
」
」
」機構設計
機構設計
機構設計
機構設計
機構之尺寸係依據其位置與運動範圍來設計。在這裡的機構設計,指的是一種方案 可以滿足所有的設計要求,而且所需的支出(如重量,面積,體積,應力等)最小。 對於一個設計方案來說,許多方面都是可以設計分析的,比如:尺寸(如厚度)、 形狀、支撐位置、自然頻率、材料特性等。實際上,所有可以參數化的 ANSYS 選項都 可以作機構設計分析。 在進行機構設計分析時要先聲明分析的變量,即設計變數、狀態變數和目標函數三 項,以下介紹各個設定。 設計 設計設計 設計變變變數變數數(Design Variables) 數 設計變數(DVs)是機構設計分析中的獨立變數,分析結果的取得就是通過改變設 計變數的數值來實現的。每個設計變數都有上下限,它定義了設計變數的變化範圍。常 見的設計變數,如長度、厚度、半徑或節點,分為單一設計參數及多設計變數。 設計變數項目如圖 3-8 中的三個尺寸值,為 z 軸細柱群的長度(SLz),x 與 y 軸細柱 群的長度(SLx),x、y 與 z 軸細柱群的寬度(SW),而表 3-1 即為設計參數的設定範圍值。
設計變數項目 範圍值(mm) z 軸細柱群的長度(SLz) 5~25 x 與 y 軸細柱群的長度(SLx) 5~25 x、y 與 z 軸細柱群的寬度(SW) 0.5~1.5 表 3- 1 設計參數設定範圍表 狀態變數 狀態變數狀態變數 狀態變數(State Variables) 狀態變數(SVs)是指約束設計的數值。在尋找設計問題時,設計者常常會受到許 多設計的限制,如應力、溫度、熱流率、頻率、變形等,然而設計分析經由這些限制條 件限制後,根本無法找到最佳解,如材料的減少與應力的降低往往無法同時滿足,這些 限制條件又稱為狀態變數,為設計參數的一種。若設計問題中加入限制條件,則該問題 變成限制條件設計問題,一般限制條件分為等式限制條件及不等式限制條件。在這邊我 們設定材料的降伏應力為 270MPa,參考表 3-2。 項目 楊氏係數 密度 降伏應力(σy) 浦松比 數值 71 GPa 2700 ×10-9kg/mm3 270 MPa 0.33 表 3- 2 T6-6061 特性表 目標函數 目標函數目標函數 目標函數(Objective Function) 目標函數是指機構設計所要分析的的數值。它必須是設計變數的函數,也就是說, 改變設計變數的數值將改變目標函數的數值。在 ANSYS 分析中,只能設置一個目標函 數,其值必須為正。
本論文中的目標函數為定位平台的位移量,由於壓電致動器的運作範圍在-30V~ +30V 之間,因此設計上希望每個軸向皆能達到 8µm,也就是±4µm 位移量,故設定值為 4×10-6。 經過機構設計分析後即可得到所要的合適尺寸,並由後處理器顯示材料的最大應 力、應變值及所施加的壓力值,而表 3-3 即為經機構設計分析後的合適尺寸值。 設計項目 合適尺寸(mm) z 軸細柱群的長度(SLz) 20 x 與 y 軸細柱群的長度(SLx) 15 x、y 與 z 軸細柱群的寬度(SW) 1 表 3- 3 分析後的各個尺寸值 將所得到的合適尺寸重新由前處理器建模、參數設定、網格建立及邊界條件設定, 再進入求解器求解出應力、應變及位移值,最後再由後置處理器(POST1)顯示出應力、 應變及最大位移圖。圖 3-9 到圖 3-17 所示即為「平行細柱群」機構設計分析後所得尺寸 之模擬的應力、應變及位移圖。 圖 3-9 到圖 3-11 為「平行細柱群」機構設計後合適尺寸的各軸向應力圖,其最大應 力約為 3MPa,遠遠小於降伏應力 270MPa,其安全係數約為 90。 圖 3-15 和圖 3-16 分別為分析後的單軸及雙軸位移圖,從圖 3-15 上面可發現模擬出 來的單軸最大位移量約為 4µm,符合我們所預期。圖 3-17 為 Z 軸施加 30V 之平台位移
圖 3- 9 機構設計分析後之 x 向應力圖
圖 3- 11 機構設計分析後之 z 向應力圖
圖 3- 13 機構設計分析後之 y 向應變圖
圖 3- 15 單軸施加正負 30V 之平台位移圖
圖 3- 17 Z 軸施加 30V 之平台位移圖
3.3
3.3
3.3
3.3
系統整合
系統整合
系統整合
系統整合
圖 3-18 所示為實驗儀器量測流程圖,由於必須同時操控三種不同電壓訊號的壓電 致動器,所以使用 National Instrument (NI)所製造的 PCIe-6259 資料擷取卡來作為電壓訊 號的擷取轉換,並且利用 MATLAB/Simulink 來產生所需的訊號以及回授訊號的處理。
由於資料擷取卡僅能產生±10V 的電壓,與我們所希望的±30V 驅動電壓有相當的差 異,因此使用自製高壓放大器來達到加大電壓訊號的功能,接著使用 Keyence 公司所生 產的雷射位移感測器來做為控制器的回授訊號。
圖 3- 18 實驗儀器量測架設圖
3.3.1
控制軟體
控制軟體(MATLAB/Simulink)
控制軟體
控制軟體
MATLAB[28]是由美國 MathWorks, Inc.公司推出的套裝軟體,其名稱是「矩陣實驗
室」(MATrix LABoratory)所合成,因此可知其最早的發展理念是提供一套非常完善的矩 陣運算指令,但隨著數值運算需求的演變,MATLAB 已成為各種動態系統模擬、數位 訊號處理、科學計算的標準語言。MATLAB 是一種計算核心,圍繞著這個計算核心, 有許多針對不同應用所開發的應用程式,稱為工具箱(Toolboxes),這些工具箱包羅萬 象,從線性代數、數值分析、通訊、自動控制、數位訊號處理等。為了使用上的方便建 模,MATLAB 後續推出了 Simulink 視覺建模[29-30]的程式設計法,藉由已定義好的方 塊,可快速建構出自己所需要的系統模型。
![圖 1- 1 微位移平台[6] (a) (b) 圖 1- 2 微步進直線定位裝置實體圖(a)、(b)[7] 在蚇蠖式的定位平台方面,1985 年 Mamin[8]等屬於壓電致動蚇蠖式定位平台方 面,利用雙層壓電晶片壓電陶瓷致動器的變形,配合具有靜電吸引力的腳座,設計出單 步位移 25~400nm 之二軸長行程奈米定位機構,其定位速度最快可達 40µm/s。1996 年 Aoyama[9]設計一組具有模組化結構的微小機械人,其運動方式主要是以蚇蠖運動進行 各式定位運動。1997 年 Shamo](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/12.892.327.565.106.282/移平台電晶片壓電陶瓷致動器變形配合具有吸引設計計一組具有微小.webp)
![圖 1- 3 蚇蠖運動機構運動原理[10]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/13.892.282.614.295.1023/圖13蚇蠖運動機構運動原理1.webp)
![圖 1- 5 蚇蠖平台運動流程圖 在形變式定位平台方面,1978 年,Scire 與 Teague[14]利用槓桿原理,將兩組槓桿 機構轉換為撓性結構,使壓電致動器行程放大 30.3 倍,具有 50µm 的行程,但須使用 1000V 之驅動電壓,使用上並不方便,其實體圖如圖 1-6。1991 年 Dudnikov[15]等利用 壓電元件變形加上具有電磁力的腳座,設計出具有 0.05µm 定位精度、200mm 行程、4mm/s 速度之高精度 XYθz 定位機構。1994 年 Smith[16]等使用壓電元](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/14.892.215.680.106.343/程放倍具行程但須使用V之驅壓使並不有電行程速度之高精度機構.webp)
![圖 1- 8 x-y 精密微定位平台示意結構圖[19]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/16.892.295.594.115.366/圖18xy精密微定位平台示意結構圖19.webp)
![圖 1- 11 平行薄板群為導引機構之奈米定位平台[22] 綜觀上述三類以壓電致動器驅動之定位平台,在摩擦驅動平台中,雖然可以達到長 行程的效果,但是此方式對於摩擦力還沒有完整的模型可以使用,因此在操控上往往會 造成重複性不佳的情形;而蚇蠖式定位平台雖然也同樣可以達到長行程的效果,但是在 單軸方向的移動需要較多的致動器才能達成,這樣會使的控制困難且成本提高。因此, 本論文將著眼於利用材料彈性變形原理設計的形變式定位平台。所謂形變式的定位平台 係利用材料在彈性限度內,受到拉應力、剪應力與彎曲應力時材料會產](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/17.892.339.551.106.281/也同效果但是單軸方向移動需要較多致動器才成這料在彈性限度內受.webp)
![圖 2- 6 壓電致動器潛變現象 2.1.4 壓電材 壓電材料組成律壓電材壓電材料組成律料組成律 料組成律 壓電性所涉及者為機械能與電能之間的互換,而所涉及的變數有四個,其中兩個為 機械彈性量,即應力應力 應力(T)與應變應力應變 應變(S);而另外兩個為介電量,即電場應變電場電場 電場(E)與電位移電位移電位移 電位移或電通量電通量電通量電通量 密度 密度密度 密度(D);這四個參數之間的關聯可以用壓電方程式[26]來表示,依所選擇變數的不同, 壓電方程式有四種不同的形式,分別為: ](https://thumb-ap.123doks.com/thumbv2/9libinfo/8451448.182534/26.892.117.786.115.1192/壓電致壓電材壓電性能之間位移移或電通量電通量電通量電通量密度.webp)