國
立
交
通
大
學
光電工程學系碩士班
碩
士
論
文
光學指控器之設計
Design of Optical Finger Navigation
研 究 生:陳弘胤
指導教授:陳志隆 教授
光學指控器之設計
Design of Optical Finger Navigation
研 究 生:陳弘胤 Student:Hong-Yin Chen
指導教授:陳志隆 Advisor:Jyh-Long Chern
國 立 交 通 大 學
光電工程學系碩士班
碩 士 論 文
A ThesisSubmitted to Institute of Electro-Optical Engineering National Chiao Tung University
in partial Fulfillment of the Requirements for the Degree of
Master In
Electro-Optical Engineering
June 2011
Hsinchu, Taiwan, Republic of China
i
光學指控器之設計
研究生: 陳弘胤 指導教授:陳志隆
國立交通大學光電工程學系碩士班
摘要
本篇論文主要從光學指頭導航器效率進行改良,在光的傳導過程中嘗試不同 的方法,光導管曲面將越彎曲,使得光損耗越多。重新設計光學系統,讓光偵測 器準確地感應到光的移動方向,來操作業系統內的滑鼠指標,解決機械件以及電 容式觸碰屏所衍生的問題。再用光學軟體進一步模擬、分析和優化,並評估實際 製程可行性,加以修正。最後在利用 3D 繪圖軟體繪製機構件,並模擬此光機構 元件,與先前模擬結果有無落差,回頭探討設計過程有無瑕疵,一步步將此光機 電元件完成。ii
Design of Optical Finger Navigation
Student: Hong-Yin Chen Advisors: Dr. Jyh-Long Chern
Institute of Electro-Optical Engineering
National Chiao Tung University
Abstract
The thesis was discussed how to prove the design of OFN(optical finger navigation), and try more methods in light transmission. The more the light guide bent, the more its irradiance be lost. We modify optical system in which sensor detect the light moving better than before. More problems likes mechanical type and controlling mouse of operating system and touching display. Through optimization, simulation and analysis of the optical software: Code V and LightTools, and assess the feasibility of production. Then using 3D graphics software to create institutions components, and using optical software to analyze the differences between past and now. Finding the problem, and finish the institutions components.
iii
致謝
兩年的時間說長不長,說短不短,但對於我在交大碩班地兩年,給我許多啟 發跟鼓勵,光學設計的領域是非常吸引人,尤其是指導老師陳志隆教授都大膽放 我們去做模擬或特別的想法,使我得到許多寶貴的經驗,相信以後我進入社會工 作,仍然受用無窮。 感謝學長偉宏、柏宇、書正,以及學姊意雯在做研究過程的指導,使我很 快的進入狀況。一開始看學長姐們在 meeting 的大方表現,給予我不少勇氣。做 專題的時候,柏宇學長即使在外島當兵,休假也會關心我的論文狀況,並提供珍 貴的建議。跟學長姊們一起出遊的畫面,仍歷歷在目,除了學業上,在日常生活 中學長姊們很會照顧我們,希望我們的友誼長在。 同窗的好同學國展、紘瑋、進興、明憲、品儀和志庭,那段為了每個禮拜的 meeting 而焦頭爛額的那段時光,雖然痛苦卻很充實,很高興我們一起度過困難 的時光。每個禮拜都會固定運動,身體健康以外,更加深大家的感情,在這裡我 必須說,有你們真好。 最後感謝我的家人,能支撐我讀碩士,即使在我課業不佳的狀況下,能支持 我、鼓勵我,讓我繼續向前走,僅將本文獻給所有關愛我的家人與朋友,希望大 家身體健康,課業以及工作都有極大的成就。iv
目錄
摘要 ... i Abstract ... ii 致謝 ... iii 目錄 ... iiiv 表目錄 ... vii 圖目錄 ... viii 緒論... 1 第一章 1.1 光學應用的相關介紹 ... 1 1.2 研究動機 ... 5 1.3 論文架構簡介 ... 7 光學指控器的介紹 ... 8 第二章 2.1 光感應器介紹 ... 8 2.2 指紋簡介 ... 9 2.2.1 指紋類型 ... 9 2.2.2 指紋應用 ... 11 2.3 光學元件之介紹 ... 11 光源之介紹 ... 13 第三章 3.1 發光二極體 (Light Emitting Diode, LED) ... 13v 3.1.2 本文使用的 LED 規格及在 LightTool 建立模型 ... 16 3.2 雷射二極體 (Laser Diode, LD) ... 18 3.2.1 雷射二極體簡介及分類 ... 18 基本理論 ... 22 第四章 4.1 幾何光學基本概念... 22 4.1.1 Fermat 原理 ... 22 4.1.2 折射定律與反射定律概論 ... 23 4.1.3 光追跡(Ray tracing) ... 27 4.2 照明理論基本概念... 29 4.2.1 光展量(Etendue) ... 29 4.2.2 邊緣光線定理 ... 31 設計方法與分析 ... 32 第五章 5.1 規格介紹 ... 32 5.2 設計流程 ... 34 5.3 均勻照明 ... 34 5.3.1 理論介紹 ... 34 5.4 不漏光的理想曲面... 38 5.4.1 構想及分析 ... 38 5.4.2 進階應用與探討 ... 42 5.5 光學系統 ... 43 5.5.1 解像力(Resolution) ... 44
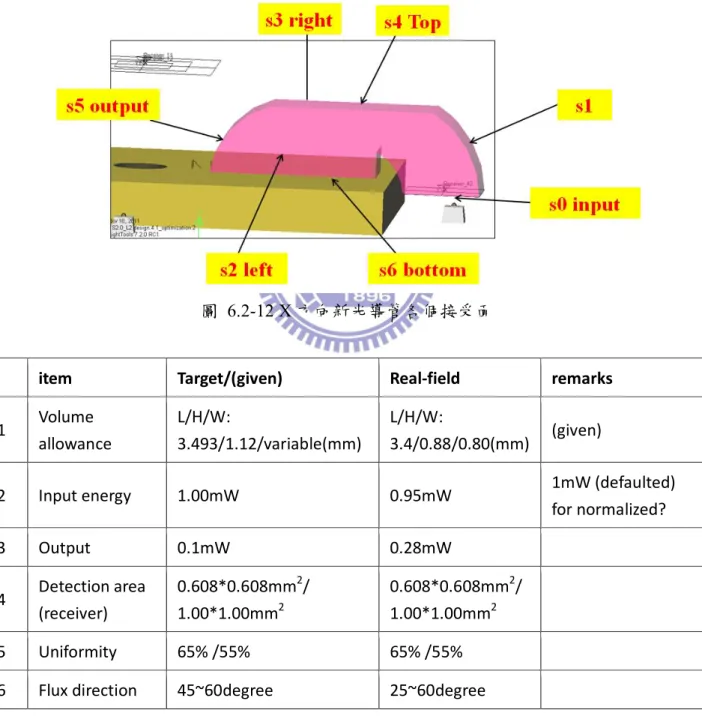
vi 5.5.2 像差 ... 45 5.6 透鏡形式 ... 47 結果與討論 ... 49 第六章 6.1 光學系統模擬結果... 49 6.1.1 單透鏡 ... 49 6.1.2 雙透鏡 ... 52 6.2 照明系統模擬結果... 53 6.2.1 X 方向光導管和機構組裝 ... 53 6.2.2 Y 方向光導管和機構組裝 ... 55 6.2.3 X&Y 方向光導管重新設計... 58 6.3 改善問題並修正 ... 61 結論與未來展望 ... 66 第七章 附錄 ... 67 1 ... 69 參考文獻
vii
表目錄
表 1.2 現今技術比較表格... 6 表 2.2-1 紋線統計數據 ... 10 表 5.1-1 光學系統規格 ... 33 表 6.1-1 單透鏡規格表 ... 49 表 6.1-2 偏移透鏡位置模擬結果... 51 表 6.1-3 傾斜角度模擬結果 ... 51 表 6.1-4 厚度模擬結果 ... 52 表 6.2-1 X 方向新光導管規格... 58 表 6.2-2 新舊光導管模擬結果比較表 ... 60 表 6.3-1 光導管(L2)之規格 ... 61 表 6.3-2 光導管(L2)各個面輻射功率 ... 62 表 6.3-3 光導管(F2)改良後規格 ... 63 表 6.3-4 光導管(F2)各個面輻射功率 ... 64 表 6.3-5 OFN 均勻度和功率之比較 ... 65viii
圖目錄
圖 1.1-1 照明例圖 ... 1 圖 1.1-2 完整的液晶面板結構 ... 2 圖 1.1-3 汽機車之照明應用 ... 3 圖 1.1-4 Kohler 照明專利結構圖... 3 圖 1.1-5 DLP 投影機結構和實物 LP 投影機結構和實物 ... 4 圖 1.1-6 顯微鏡結構及外觀 ... 5 圖 1.12-1 反射式光學指控器的行進光路線示意圖 ... 6 圖 1.1-2 現今技術的產品示意圖... 6 圖 2.1-1 型號 VD5377 光感應器 ... 8 圖 2.1-2 指紋圖形 ... 9 圖 2.2-2 指紋圖形計算判斷 ... 10 圖 2.2-3 指紋日常應用 ... 11 圖 2.3-1 光學指控器 2.15mm LED 機構 ... 12 圖 2.3-2 光學指控器 2.15mm LED 實際樣品 ... 12 圖 3.1-1 LED 簡易分類 ... 13 圖 3.1-2 Lamp-LED ... 14 圖 3.1-3 SMD-LED ... 15圖 3.1-4 Lumileds Luxeon High-Power LED ... 15
圖 3.1-5 ICP 10×10 AIN COB 基板 ... 16
圖 3.1-6 禧通 LED 芯片外觀片外觀 ... 17
圖 3.1-7 禧通 LED 發散角 ... 17
圖 3.1-8 場型建構和模型建構 ... 18
ix 圖 3.2-2 各種雷射波長以及製造的材料 ... 19 圖 3.2-3 藍光雷射二極體 ... 20 圖 3.2-4 雷射二極體實物和結構圖 ... 21 圖 4.1-1 光程路徑 ... 22 圖 4.1-2 a 點到 b 點的實際路徑與假想路徑... 23 圖 4.1-3 光的折射路徑 ... 24 圖 4.1-4 光的反射路徑 ... 25 圖 4.1-5 鏡面反射特性 ... 26 圖 4.1-6 漫反射特性 ... 26 圖 4.1-7 光的全反射示意圖 ... 27 圖 4.1-8 以向量型式表現反射定律 ... 28 圖 4.1-9 以向量型式表現折射定律 ... 28 圖 4.2-1 光線傳遞在不變量理論之示意 ... 29 圖 4.2-2 反射照明示意圖 ... 31 圖 5.1-1 模擬光學指控器模型 ... 32 圖 5.1-2 光學指控器空間架構圖... 32 圖 5.1-3 光導管架構圖 ... 33 圖 5.3-1 自由曲面和入射出射光線幾何 ... 35 圖 5.3-2 照明模型 ... 36 圖 5.4-1 Offner 反射鏡放大率為 1 ... 38 圖 5.4-2 光導管模型 ... 39 圖 5.4-3 x0的光源等分角示意圖 ... 40 圖 5.4-4 x0前兩點的斜率示意圖 ... 40 圖 5.4-5 不漏光之曲面 ... 41 圖 5.4-6 模擬光線路徑 ... 42
x 圖 5.4-7 光管例子-螺旋管 ... 42 圖 5.4-8 螺旋管遠場分佈 ... 43 圖 5.4-9 螺旋管光強分佈 ... 43 圖 5.5-1 空間頻率表示圖 ... 44 圖 5.5-2 2D 影像模擬圖形和 MTF 比上空間頻率圖形 ... 45 圖 5.5-3 球面像差 ... 45 圖 5.5-4 慧形像差... 46 圖 5.5-5 像散 ... 46 圖 5.5-6 場曲 ... 47 圖 5.5-7 畸變 ... 47 圖 5.6-1 光圈擺放位置示意圖 ... 48 圖 5.6-2 光圈在各位置所模擬的完美透鏡形式 ... 48 圖 5.6-3 歐洲專利 EP 2 239 946 A1-Door lens 剖面圖 ... 48 圖 6.1-1 單透鏡 ... 50 圖 6.1-2 單透鏡模擬結果 ... 50 圖 6.1-3 雙透鏡 ... 52 圖 6.1-4 雙透鏡模擬結果 ... 53 圖 6.2-1 光導管(2.5mm)模型 ... 54 圖 6.2-2 光導管(2.5mm)模擬結果 ... 54 圖 6.2-3 光導管與光學系統結合... 55 圖 6.2-4 光導管(2.5mm)與光學系統結合模擬結果 ... 55 圖 6.2-5 光導管(2.5mm)模擬一百二十萬條光追跡 ... 55 圖 6.2-6 光導管(3.573mm)的模型 ... 56 圖 6.2-7 光導管(3.573mm)模擬結果 ... 56 圖 6.2-8 光導管(3.573mm)模型... 56
xi 圖 6.2-9 光導管(3.573mm)X 方向模擬結果 ... 57 圖 6.2-10 光導管(3.573mm)Y 方向模擬結果... 57 圖 6.2-11 光導管(3.573mm)X&Y 方向模擬結果 ... 57 圖 6.2-12 X 方向新光導管各個接受面 ... 58 圖 6.2-13 新光導管(3.573mm)模型 ... 59 圖 6.2-14 新光導管(3.573mm)X 方向模擬結果 ... 59 圖 6.2-15 新光導管(3.573mm)Y 方向模擬結果 ... 59 圖 6.2-16 新光導管(3.573mm)X&Y 方向模擬結果 ... 60 圖 6.3-1 光導管(L2)示意圖 ... 61 圖 6.3-2 光導管(L2)模擬結果 ... 62 圖 6.3-3 光導管(F2)示意圖 ... 63 圖 6.3-4 光導管(F2)模擬結果 ... 64 圖 附錄 1 各個光柵示意圖... 67
1
緒論
第一章
1.1 光學應用的相關介紹 幾何光學,利用折射定律、反射定律以及干涉與繞射原理,發展出廣泛且多 元光電工程。並隨著電磁波理論完善,由愛因斯坦在 1905 年所解釋的光電效應, 結合牛頓的粒子說以及惠更斯的波動說,開啟太陽能技術以及後來的發光二極體 。並在藉由富式光學,將影像數位化更加強後製處理。照明系統使我們的生活更 加多采多姿,光訊號等接收發器,資訊傳播速度更加快速,太陽能電池提供人類 新的能源。近年來,塑膠易製造和材料便宜,漸漸取代玻璃為光學的主要材料, 相關的製程技術也跟著改變,面板和相機等相關產品更能讓人們接受。發光二極 替代較為耗能的白熾燈泡,提供較高的發光效益。液晶顯示器將傳統螢幕(陰極 射線管顯示器,cathode ray tube)改善其厚度,並利用光學材料的特性,拉高對比 度。在科技日新月異的時代,有關光學的應用越來越重要,尤其在二十世紀資訊 爆炸的時代,不管在電腦、電視、相機和智慧型手機,訊號辨識、傳遞或儲存都 與光學息息相關。 光學的應用偏向照明系統,從電燈的發明以來,科學家就已經在研究光學, 如何讓人眼或是接受器看得見、看得更清楚,照亮觀察的物體,提升成像品質。 夜幕低垂時,如何讓電燈有效的發出最大能量功率,並減少損耗的能量,投射到 所規範的範圍內,應用在路燈、車燈 1 和手電筒。 (a) 路燈[1] (b) 車燈[2]2 (c) 天幕燈[3] (d) LED 手電筒[4] 圖 1.1-1 照明例圖 日常生活裡,常見的光學應用有三大類:照明系統、訊號傳播和光能轉換其 他能量。照明系統又分為常見的兩大系統:光管和透鏡組。光管主要限制光線路 徑,引導到我們所觀察的物體或位置,它在乎亮度強弱以及照射的方向,光線被 限制在光管內傳遞從入口端到出口端,目前最常用在液晶顯示器上的背光模組或 汽車的內部照明。液晶顯示原理如下圖,在中間的液晶層是靠「旋光性」來篩選 亮度,透過液晶兩端加電壓控制排列狀態,因為電壓變化導致各處液晶旋轉的角 度不一樣,從而改變穿透光的極性,經由上、下兩個極化方向呈垂直 90 度的偏 光片篩選獲得冀求的顯示亮度。而此液晶是夾在兩片玻璃基板間,玻璃基板上面 鍍有薄膜電晶體,因此稱為 TFT 基板;在上層基板前另設置一片彩色濾光片, 因為濾色片是透光的,可以透過原色 RGB,觀察者由此三原色的混成而感受到 各種層次的顏色變化,若沒有濾光片時,僅能呈現單色的明暗現象。 圖 1.1-2 完整的液晶面板結構[5]
3 除此之外光管在汽車的內部的照明系統更是不可或缺,車內開關、儀表板或是依 些標記符號等等皆應用到光管,經由對非連續性光追跡分析使得設計和發展上有 極大的進步,降低以往光系統分布受限於其幾何上的複雜性,因此隨著設計方式 及程序上的進步,得以降低許多以往嘗試錯誤的時間和成本,使得在汽車照明工 業上有著更多的應用。 (a) 車內部照明[6] (b) 數位導光儀表板[7] 圖 1.1-3 汽機車之照明應用 而透鏡組不把光侷限在內部全反射傳導,而是經過透鏡折射,使光改變方向,聚 焦屏幕或是所設定的位置,投影機、顯微鏡和照相機皆透過透鏡組合,而分別有 不同的功能。投影機的構造有許多方式,早期的 DLP 投影機(Digital Light Processing),運用 Kohler 照明原理[8],此法是引入集光器把光源成像到投影鏡 頭的入射瞳孔(entrance pupil)上,那理想的結果光就會全部從出射瞳孔(exit pupil) 出去,下圖為 Kohler 照明專利示意圖,此系統是屬於投影照明系統,而大部分 投影機都是以此為架構再做修改。
4
DLP 投影機照明過程,燈泡發出光線,經過透鏡匯聚到數位微透鏡元件(DMD, Digital Micromirror Device)芯片上,再經過 DMD 芯片將光線反射,通過鏡頭投 射到慕布上,形成我們最終看到的圖像。其中芯片上面有上萬個微小反射鏡片, 投影機內部的電腦能夠單獨控制每個鏡片的運動,決定是否將該投射到鏡片的光 反射出去。 但是這樣投射出來的圖像是黑白的,不是我們現實世界中的彩色,所以需要 燈泡發出的光線到達 DMD 芯片之前加上一個色輪,由紅、黃、三種顏色組合, 它會以 60Hz 的頻率進行旋轉,當光線通過色輪紅色部分的時候,投影出來的圖 像是一幅紅色的灰度圖像,而藍色和黃色通里,由於人眼有視覺暫留的特性,我 們觀察到的是一幅由紅黃藍三原色疊加的全彩色圖像。 (a)DLP 投影機結構示意圖[9] (b) DLP 投影機[10] 圖 1.1-5 DLP 投影機結構和實物 至於顯微鏡的照明方式[11],跟投影機也很類似,都是運用 Kohler 照明加以改變 其原理都是一樣的,用此法好處有三,一是均勻照明,二是照明的焦熱點不在待 測物上,因此不會破壞樣品,三是聚光鏡將視場光闌成像在待測物平面處,改變 大小可控制照明範圍,由光源上任一點發出的光,經反光鏡系統,光源的視場光 闌,把已放大而又已會聚了的光源像,投射於聚光鏡的孔徑光闌所在的平面即聚 光鏡的前焦平面上,而光源發光體的所有光點匯集起來,便在聚光鏡的孔徑光闌 上形成了發光體的完整像,從光學系統的原理來看,就好像把光源的發光體正好 擺在聚光鏡下方的前焦平面上,而從聚光鏡出射的照明光,就是發光體上所有發 光點從各個方位上匯集起來的一束平行光,它穿越樣品使樣品上獲得充份的照明, 因而從物鏡成像的視域中看不到發光體的像,也就是不出現光源的樣子,這一束 平行的照明光束,實際上包含了光源像與孔徑光闌的像,則由物鏡會聚成像於物
5 鏡的後焦平面,這樣只要把目鏡從目鏡筒上拔出來望進目鏡筒內,就可以看到這 兩個像。 (a) 顯微鏡結構示意圖[12] (b) 生物顯微鏡[13] 圖 1.1-6 顯微鏡結構及外觀 1.2 研究動機 滑鼠最早運用的原理為軌跡球,然後為機械搖桿,後來轉變為光學手指滑鼠 以及觸摸式螢幕。由於軌跡球以及機械搖桿,容易使灰塵進入並機械件互相磨損, 所以科學家利用光學原理來控制滑鼠,並將技術移植到手機上面。而觸摸式螢幕 操作簡單,但價格高昂並能量耗損高,若將技術運用在手機上,能量問題亟需改 善,且準確率不高。操縱滑鼠指標的技術還有軌跡球,表 1.2-1 有詳細的比較。 手機在日新月異的科技時代裡,已經成為人手一把的科技產品,然而隨著每 個人的需求不同,手機的設計也有所差異性,光學指控器應用在商務手機或是黑 莓機,利用光學感應指頭上的移動,操作手機的介面更為便利,而原本普遍使用 的機械式的機構件將被取代,機械式的機構件令人詬病的機械毀損也將獲得改善, 如何提升光學指控器的效能,以更小的尺寸鑲嵌在手機裡面,都是值得研究並深 入討論的課題。 光源使用紅外光線的發光二極體,好處在於紅外光的穿透性低,容易被手 指的指紋所反射,使得微感應器能詳細記述手指成像。
6
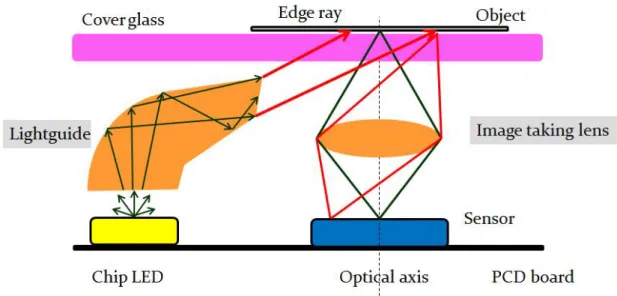
圖 1.2-1 反射式光學指控器的行進光路線示意圖
表 1.2 現今技術比較表格
(a)軌跡球 (b)機械式搖桿 (c)觸碰式螢幕 (d)光學指控器 圖 1.2-2 現今技術的產品示意圖[4]
Jog ball Mechanical
rocker Touch panel
Optical finger navigation
Principle Hall effect Machinery touch Capacitive
sensing Optics
Operation 360
o
navigation,
four rolling direction One way moving Finger touching
360o navigation,
four rolling direction
Feature Convenient
operation Cheap and mature
Convenient operation
Operate good, clear and small
Disadvantage Clean hard, drawing
uneasy
Easily damaged, Only four ways
Expensive, not nimble
No manuscript function for drawing
7 1.3 論文架構簡介 第一章對於光學相關應用簡略介紹,針對不同需求有著不同設計,使生活更 加便利。 第二章介紹光學指控器各個部份的機構件,而光感應器主要辨識指頭移動方 向,而指紋在這過程中扮演著不可或缺的角色,如何運用其特殊性將一一呈現在 論文中。 第三章透過光源介紹,可知任何波段都有其重要應用性,我們利用光學軟體 (LighTools[14])模擬 LED 光源模型,建立配光曲線的場型,介紹其尺寸大小,此 LED 模型的表現程度和相關參數都值得討論。接著模擬 LD 光源模型,並討論其 應用,模擬發光場型,用於光學指控器的光源。 第四章為光學的基本原理,分為成像系統以及照明系統,成像系統首先透過 Fermat's 原理去了解兩個重要定律:折射定律以及反射定律,並且介紹最後設計最 需要的全反射觀念以及光追跡概念,而照明系統則包含光展量(Etendue)和邊緣光 線定理,當我們設計方法時,有著這些基本原理的基礎,求證模擬結果將會輕鬆 許多。 第五章為設計方法與分析,利用光學的基本原理,先設計光學系統,緊接著 光導管的設計,最後銜接機構件,一個初步的光學指控器模型產生。透過各個系 統的規格介紹,判斷是否優劣,最後再用光學軟體(LighTools)分析其模擬結果, 得到實際值去比較理論值,其中定義成像品質的標準和公差介紹,以及照明系統 分析(均勻度和能量功率)。 第六章為結果與討論,其模擬結果比較目前產品的數據,並參考目前所生產 的樣品,實際上所遇到的問題,對照模擬結果,找出兩者的差異性,改善問題並 提升光學指控器的效能,達到產品規格的要求。 第七章為此篇論文研究之結論,總結先前設計中遇到的問題以及改善後衍生 的問題一一整合。
8
光學指控器的介紹
第二章
2.1 光感應器介紹
光感應器的型號:Silitech-VD5377 光感應器尺寸為 0.608mm×0.608mm, 圖 2.1-1 型號 VD5377 光感應器[15] 解析度 可編程序達 3200 cpi 像素尺寸 30.4 μm 像素矩陣尺寸 20 × 20 pixels 影格速率 1k/2k/4k fps(自動或手動) 追跡性能 1 m/s, 20g 低漂移,高精度 電源電壓 內部穩壓為 2.0V~3.0V 直接驅動電壓為 1.8V 操作溫度 -20℃~70℃ 表 2.1-1 VD5377 之規格 VD5377 光感應器擁有低功耗,且單芯片 IC 控制器可包含所有功能,如:光學指 控器的模板、光學原理的遊戲搖桿,更能移動靈敏且有更長的壽命。減少優化光 學指控器的成本,包括導航應用,即使在明亮的陽光下,也能確保最佳的性能。9
2.2 指紋簡介
當胎兒在母體內發育三至四個月時,指紋就已經形成,但兒童在成長期間指 紋略有改變,直到青春期 14 歲左右才會定型。指腹和人體大部分的皮膚構造相 近,同樣有汗腺分布,每個手指平均每一小時排泄的汗液為 0.0625c.c.,其成分 大部分為水分,另外尚有蛋白質、脂肪、尿素和其他有機化合物。 2.2.1 指紋類型 指紋在早期生物統計學是主要的研究之一,科學家們利用指紋的一些物理特 性來將它們加以定義,在西元 1901 年,Edward Richard Henry 設計了一套指紋辨 識系統[16],依照指紋形狀可分成斗形紋、箕形紋和弧形紋三大類,根據細部形 狀的不同,還可在分類下去。圖 2.2-1 指紋圖形:(a)斗形紋,(b)箕形紋,(c)弧形紋
斗形紋的特徵是有一個環形(W)和兩個三叉紋線(V,V),箕形紋則是有羅馬拱門 形狀(X)和一個三叉紋線(V)。
依據三種類型,Edward Richard Henry 訂出規則來計算不同紋形的紋線,選 取完整的脊紋圖案,來確認中心指紋的形狀,且計算並記錄其紋線數目,亦可輔 助指紋紀錄。 指紋在光學指控器中,扮演一個非常重要的腳色,其運用重點不在它的指紋形狀。 如何分辨有無手指滑動或其滑動方向,在於紋線寬度以及紋線之間的間隔,我們 定義紋線以及其間隔為一對黑白條紋(可假定光打入其上),先前有介紹光感應器 的偵測範圍,一對像素的寬度為 0.06mm,感應器長寬皆為 0.608mm,只要紋線 寬度(不包含紋線間隔)在 0.06mm 和 0.608mm 之間,光感應器便可以偵測指紋亮 暗,便知道手指滑動的方向。
10 圖 2.2-2 依左排列到右,分別是弧形紋、箕形紋和斗形紋,總脊紋數為中心到三 叉紋線較長距離之間的紋線,加上中心到三叉紋線較短距離之間的一半紋線。因 此,可以計算出 A=0,B=13,C=21(即 17 + (0.5×8))。[17] 通常都是找男女等比例再細分人種年齡,若運用在光學指控器上,在計算紋 線的過程,注意紋線寬度即可,而紋線寬度會隨著不同手指有所差異。所以需要 取一個有效面積,來估算紋線數量,而算出紋線寬度。 表 2.2-1 紋線統計數據 上表取一個在指頭上 5×5mm2的面積,平均值為 13.55 條紋線。假若在一邊長度 5mm 有 13.55 條紋線加上它們之間的間隔,為 13.55 對條紋,算出一對條紋寬度 約 0.37mm,符合光學指控器的規格。即使是最少的 8 對條紋,一對紋線寬度約 為 0.625mm,但其紋線寬度並不會是 0.625mm,也符合光學指控器規格。除非 人們的指紋太淺或是紋線太寬,光學指控器才不適用,需要改其規格。對於指控 器來說,指紋的形狀並不是重點,而在於紋線以及其紋線間隔是否可較完整地藉 由發光二極體的紅外光反射至光感應器。
11 2.2.2 指紋應用 指紋最早應用在犯罪偵查,比對嫌疑犯和現場採集到的指紋,由於科技進步,指 紋系統的辨識能力越來越高,可做的商用領域越來越多,例如:身份辨識、代替 印章、指紋鎖以及光學指控器等。 (a) 指紋辨識門禁裝置[18] (b) 微軟的指紋辨識滑鼠[19] 圖 2.2-3 指紋日常應用
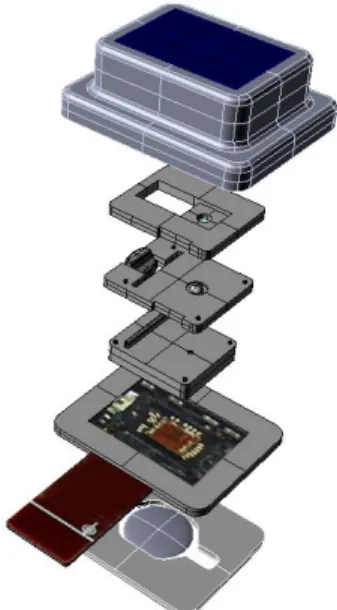
2.3 光學元件之介紹
由上往下介紹: 第一層:上蓋(Cover),塑料為 PC,功用讓手指按其上,有堅固耐用的功效, 保護裡面的元件。 第二層:黑件,遮擋雜光避免跑入透鏡內形成鬼影,或防止雜光打入光感應器, 造成誤判。 第三層:光學系統以及照明系統結合的 PMMA,照明系統主要讓光透過光導管 由下打到上面 Cover,經指頭反彈,再經由光學系統聚焦,成像在最下面的光感 應器。 第四層:感知器的孔徑(stop),效果類似黑件,但其功能用於調整光學系統內的 成像品質,遮擋多餘不要的光線。 第五層:基板(FPC),主要擺放光感應器,以及電路板。 第六層:底蓋,作用與上蓋一樣,保護內部元件不受損害。12
圖 2.3-1 光學指控器 2.15mm LED 機構
13
光源之介紹
第三章
在本文中所使用的光源大致上可分為兩種,發光二極體(LED)和雷射二極體 (LD)[20] ,因其發光的特性不同,在設計上的方向也有很大的差異,所以在本 章 節 簡 略 介 紹 其 特 性 、 所 使 用 的 光 源 規 格 以 及 建 立 模 型 方 法 在 光 學 軟 體 LightTool 中。3.1 發光二極體 (Light Emitting Diode, LED)
3.1.1 發光二極體簡介及分類 LED 依發光的亮度大致上可以分為兩種:紅外光(不可見光)和可見光。而 可見光又分為一般亮度 LED 及高亮度 LED 如圖 3.1-1,紅外光是一種不可見光, 其短波長多用於紅外線無線通訊、遙控器、感測器和遊戲機等產品,長波長則用 於短距離光纖之通訊光源,而一般亮度的產品用於資訊、家電等之指示光源及裝 飾燈,這類產品單價低,且因技術層次較低,產品多集中於一般亮度,高亮度產 品用於可攜式電子產品、照明、大尺寸 LCD 背光源等產品上,LED 在可攜式 電子產品的滲透率已高,目前以 LED 背光源成長最快速,照明市場則是未來的 最具潛力的市場。 圖 3.1-1 LED 簡易分類 此外 LED 的封裝方式決定了 LED 的發光場型、發光亮度以及發光效率,因其封 裝的方式不同又可大致上分為五種: (一) Lamp-LED(垂直 LED): Lamp-LED 早期出現的是直插 LED,主要將晶片黏結或是燒結在反射杯上, 反射杯的功能是收集側邊與介面所發出來的光,反射至所需要的方向。再來使用
14 金線連接晶片正極與另外一隻引腳,負極則是從反射杯與另外一個引腳相連接, 頂部最後使用高溫固化的環氧樹脂包覆。典型的傳統指示型 LED 主要是以 0.1W 功率做驅動,約有 90%的熱能是由負極經過反射杯傳導至引腳上,最後引入 PCB 板,晶片小以及導熱差是造成傳統指示型 LED 的出光量最少的最大主因,由於 製造工藝相對簡單、成本低,有著較高的市場佔有率。插件類型,有 2PIN(正負 引線),3PIN(共陽或共陰類型),4PIN(共陽或共陰類型,另有食人魚類型) ,它 主要用於,戶外顯示幕,交通號誌燈,銀行訊息看板,體育館可視設備,車用信 號燈,電子設備指示燈等。
(a) Lamp-LED 結構圖[21] (b) 日亞化學φ5mm 型白光 LED[22] 圖 3.1-2 Lamp-LED (二) SMD-LED(表面黏著型 LED): SMD LED 是貼於線路板表面的,適合 SMT 加工,可回流焊,很好地解決 了亮度、視角、平整度、可靠性、一致性等問題,採用了更輕的 PCB 板和反射 層材料,改進後去掉了直插 LED 較重的碳鋼材料引腳,使顯示反射層需要填充 的環氧樹脂更少,目的是縮小尺寸,降低重量,這樣表面貼裝 LED 可輕易地將 產品重量減輕一半,最終使應用更加完美,體積較砲彈型縮小許多,可大量應用 於小型化攜帶性產品中,一般來說一顆砲彈型所使用之封裝材料量是表面黏著型 10-20 倍左右。
15
(a) SMD-LED 結構圖[23] (b) 億光 SMD-LED[24] 圖 3.1-3 SMD-LED (三) Side-LED(側發光 LED): LED 封裝的另一個重點便是側面發光封裝。如果想使用 LED 當 LCD(液 晶顯示器)的背光光源,那麼 LED 的側面發光需與表面發光相同,才能使 LCD 背光發光均勻。雖然使用導線架的設計,也可以達到側面發光的目的,但是散熱 效果不好。不過,Lumileds 公司發明反射鏡的設計,將表面發光的 LED,利用 反射鏡原理來發成側光,成功的將高功率 LED 應用在大尺寸 LCD 背光模組 上。
(四) High-Power LED(高功率 LED):
為了獲得高功率、高亮度的 LED 光源,廠商們在 LED 晶片及封裝設計方 面向大功率方向發展,以 Lumileds Luxeon III 來說,封裝結構為六角形鋁板作底 座(使其不導電)的多晶片組合,發光區位於其中心部位,可容納多只 LED 管芯, 鋁板同時作為熱沉,這種封裝採用常規管芯高密度組合封裝,發光效率高、熱阻 低,在大電流下有較高的光輸出功率,也是一種有發展前景的 LED 固體光源。
16
有別於以上三種 LED 封裝形式,前三種 LED 屬於小功率的 LED,其消耗功率只 有 mW 級別,POWER LED 目前其功率指標在 1W 或以上,市場上已推出 1W, 3W,5W,10W,20W 及 100W 模組。小功率 LED 芯片尺寸一般較小,從 8 到 18mil 左右,不足以承載高電流密度分布,因此大功率芯片一般設計在 40mil 以 上,電極也被設計成各種各樣的梳狀結構。
(五) Flip Chip LED(覆晶 LED):
LED 覆晶封裝結構是在 PCB 基本上制有複數個穿孔,該基板的一側的每個 穿孔處都設有兩個不同區域且互為開路的導電材質,並且該導電材質是平鋪於基 板的表面上,有複數個未經封裝的 LED 晶片放置於具有導電材質的一側的每個 穿孔處,單一 LED 晶片的正極與負極接點是利用錫球分別與基板表面上的導電 材質連結,且於複數個 LED 晶片面向穿孔的一側的表面皆點著有透明材質的封 膠,該封膠是呈一半球體的形狀位於各個穿孔處,屬於倒裝焊結構發光二極體。 其適用於未來的節能環保照明,目前世界需求量並不大,多數廠家做為技術 儲備。 由於 LED 屬於被動電流型元件, 它在發光的同時,會有一部分熱散發 出來,大功率 LED 猶為明顯。
圖 3.1-5 ICP 10×10 AIN COB 基板[26]
3.1.2 本文使用的 LED 規格及在 LightTool 建立模型
此篇論文使用的 LED 光源為禧通科技所生產的 870nm RC LED Chip(1M), 其特 性與應用:1.中央波長為 870nm。2.無臨界電流。3.光束發散角小。4.溫度變化對 光電特性影響小。5.照度均勻度高。6.紅外線。
(一) 芯片規格:
長寬高分別為 0.23mm、0.23mm 和 0.18mm±0.10mm。光圈直徑為 85um,搭接襯 墊直徑為 95um。
17 圖 3.1-6 芯片外觀[27] (二) 發光場型(20mA): 以下圖形為禧通 RCLED 發散角測試結果: 圖 3.1-7 發散角:最小值為 90o;標準值為 105o;最大值為 120o 在光學軟體(LightTools)中設定光源大小和波長,只需改變特定參數即可,繪製過 程不多加詳述。而發光場型就需要特定的計算再帶入光源模擬,等式(3.1-1)為 LED 發光強度分布的近似,而 m 次方向與 2 1 有關, 2 1 為一半光強度的角度, 由圖 3.1-7 可知 55 2 1 : ) ( Cos ) I( m (3.1-1) )) ( ln( 2 ln 2 1 Cos m (3.1-2) 所以可得m1.25,再帶入式(3.1-1)到光學軟體(LightTools)內建的工具或巨集, 畫出發光場型。
18
(a) LightTools 模擬發光場型 (b) LED 模擬外型建構 圖 3.1-8 場型建構和模型建構
3.2 雷射二極體 (Laser Diode, LD)
3.2.1 雷射二極體簡介及分類 一般雷射二極體的基本結構與發光二極體相同,是以半導體(增益介質,gain medium)造成的 p-n 接面,當電子受到外來電場的牽引下從較高能級的 n 區域進 入低能級的 p 區域時,受激電子藏有的能量便釋放出來,選用的半導體做成的 p-n 接面能帶間隙為直接間隙,故能量釋放的形式是光子而不是熱。 與發光二極體不同之處,雷射二極體內有兩個互相平行的光學反射面(即鏡 子)形成光學共振器。由於半導體有整齊的晶體結構,所以容易造出光滑且平行 的表面,而半導體內的高折射率易形成全內反射。一面全反射,一面半反射,作 用是把光線在反射鏡來回反射。當被激發的光子經過增益介質多次得到足夠能量 後,就可以穿透半反射鏡發射出去。因此,此半反射鏡也被稱為輸出耦合鏡。兩 鏡面之間的距離也對輸出的雷射波長有著選擇作用,只有在兩鏡面的距離能產生 共振的波長,才能產生雷射。 (a) 雷射二極體光線分布圖[28] (b) 發光二極體光線分布圖[28] 圖 3.2-1 光線特性19 因為雷射二極體的發光波長與發光二極體不同,它可藉由透鏡將光線平行送 到遠方,也可以將光線集中於一小點,且較一般的 LED 動作速度快,故應用於 與 LED 不同的領域。具有體積小、耗電少、反應快、耐衝撞、壽命長、效率高 及價格低等優點,於光電系統產品中應用範圍十分廣泛,由於製作精細,技術層 次高, 生產設備昂貴,元件價格卻低廉,因此由光電產業整體視之,雷射二極體 是極重要的關鍵性元件。 依照波長長短及應用分為短波長和長波長雷射兩大類,短波長雷射泛指發光 波長由 390nm 至 950nm 之雷射,主要使用於光碟機、雷射印表機、條碼機、掃 描器及指示器等光資訊及顯示應用;而長波長雷射則是指發光波長由 980nm 至 1550nm 之雷射,主要用於光纖通訊。 圖 3.2-2 各種雷射波長以及製造的材料[29] (一) 短波長雷射: 1. 750-950nm: 此波段的雷射二極體主要以 AlGaAs/GaAs 材料所製成。5mW 以下的 780nm 雷射二極體是最早被商業上大量生產之雷射二極體,已被廣泛用於 CD-ROM、 CD-player、CD-game 等商品內。10mW~1W 中級操作功率方面,30mW 的 780nm 雷射二極體用於可讀寫型存取系統,如 CD-R、Rewritable MiniDisc;500mW~1W 的 808nm 雷射二極體常作為 Nd-YAG 雷射的激勵源,用於舞台秀。而 1W 以上 的高功率雷射二極體,用於激勵大功率固態雷射,以進行材料加工處理,或用於 醫學上治療、數位印刷、藝術表演上。 2. 635-670nm: 此波段的雷射二極體主要以 AlGaInP/InGaP/GaAs 材料所製成。5mW 以下的 低操作功率雷射二極體主要用於雷射指示器、條碼閱讀機、量測對準、及唯讀型 光資訊存取系統上,如 DVD-ROM 或 DVD-Video 的應用; 30mW 左右的中操 作功率雷射二極體用於可讀寫型存取系統,如 DVD-R 或 DVD-RW;而操作功率 100mW 以上的雷射二極體則用於雷射印表機、固態雷射激勵源及醫學上。
20 3. 390nm-550nm: 此波段的雷射二極體可以 InGaN/GaN/Al2O3 或 ZnSe 兩大材料系列所製成, 其發光波長分別為 390-440nm 與 520nm 左右,最大的應用是在超高密度的儲存 系統如 HD–DVD 光碟機或高解析度的印表機等。 圖 3.2-3 藍光雷射二極體[30] (二)長波長雷射 980~1550nm: 此波段的雷射二極體主要以 AlGaInAs 和 InGaAsP 材料系列所製成,主要是 應用於長距離的光纖通訊,需要操作功率大於數十 mW 至 1W 以上的雷射二極 體。其中最重要的是使用具有單模、穩頻操作的 1310nm 或 1550nm 雷射二極體, 作為光纖通訊的光源;另一應用是 980nm 或 1480nm 的雷射二極體用於光纖放大 器的激勵源,由於長距離光纖通訊朝向高傳輸速率及波長多工(WDM)系統發展, 使用光纖放大器取代傳統的電子式中繼站正快速成長普及。 (三) 垂直面射型雷射(VCSEL): 目前商品化的 VCSEL 以 AlGaAs/GaAs 的 850nm 波長為主,以 15μm 的開 口孔徑而言,臨界電流小於 3mA,在 10mA 操作電流下,輸出功率約為 2mW, 操作電壓為 1.85 volt 左右。此外 780nm、650nm、1.3μm 及 1.5μm 的 VCSEL 均在實驗室有不錯的研發結果;VCSEL 運作在較長的波長時,尤其是在 1310 與 1550 奈米之電信波段,就開發廉價的、局部區域中波長控制的光源和橫跨介於 一百公尺與一百公里之間傳輸距離的大都市光纖網路而言,是很有吸引力的解決 方案。
21 (a)VCSEL 雷射二極體[31] (b)藍光 GaN 面射型雷射之結構圖[32] 圖 3.2-4 雷射二極體實物和結構圖 (四) 高功率雷射二極體: 高功率雷射二極體的製作方法有二,其一是使用寬約 500μm 的條狀結構製 成多模態雷射晶粒,或者當功率高於 4W 時,使用數個條狀(multi-stripe)結構組 成的雷射陣列(array),再配合極佳的冷卻系統而成;其二則使用多個雷射,經各 別光纖耦合後,再集束作成次系統使用。
22
基本理論
第四章
4.1 幾何光學基本概念
4.1.1 Fermat 原理 Fermat 原理[33]由法國數學家費馬(Fermat)在 1662 年所提出,又名「最短光 時」原理。光學定義,假設光在任意介質中從一點 A 走到另一點 B 所需最短時 間的路徑傳播,而所經過的路徑不一定是最短距離。光程(Optical path length), 為幾何路徑 和折射率 ( , , )隨路徑變化的乘積。光在非均勻介質中傳播:
OPL = ∫ ( , , ) ,
= + + (4.1-1)
光在均勻介質中傳播:
OPL = , where n =constant (4.1-2)
圖 4.1-1 光程路徑 由數學式可得知,光傳播的實際路徑是使光程取極值(極大值、極小值和穩定值), 光程取極值的條件為光程的一階微分等於零。 我們選擇兩條不同路徑的光程,但起始點與終點相同:
b a b a nds nds ) OPD( (4.1-3) 為兩條光線的微小差異量,因此我們可以得到:23 0 ) OPD( im 0
b a nds l (4.1-4) 因為路徑長度
B A nds不等於 0,因此變異量 就必須為 0,所以兩路徑必須相同, 及說明了 Fermat's 原理兩點間光走最短路徑是唯一性的,若在同一介質中傳播, 光的最短路徑為直線傳播。 圖 4.1-2 a 點到 b 點的實際路徑與假想路徑 由此原理可證明,1. 折射定律光線在真空中的直線傳播。2. 光的反射定律:光 線在界面上的反射,入射角必須等於出射角。3. 光的折射定律(司乃耳定律)。 4.1.2 折射定律與反射定律概論 (一) 折射定律 折射,是指光從一種介質進入另一種具有不同折射率的介質,或在同一種介 質中因折射率不同,造成波速的差異,使光的運行方向改變的現象。最常見的例 子如木棒插入水中,單用肉眼看插入水中的木棒會曲折,這就是光進入水中時, 產生折射的效果。折射定律又稱為 Snell’s law,由荷蘭的物理學家 Willebrord Snellius 所提出, 用來闡述光折射規律的定律。光入射到不同介質的介面上會發生反射和折射,其 中入射光和折射光位於同一平面上,光的折射路徑如圖所示:
24 圖 4.1-3 光的折射路徑 由圖可知,光從 A 點穿過一介質界面傳播至 B 點的情形,其中 與 分別為兩 邊介質環境的折射率,假設
以及 分別為光在此兩種介質中行進時的速
度,而 O 為折射情形發生的位置。透過圖中的路徑關係,我們可以發現到當 A 點傳播到 B 點時,其總傳播時間 t 為:=
+
=
+
( )(4.1-5) 其中 為我們所選的變數,而當此 的選擇不同時,我們所得到的路徑也會不同, 其餘的ℎ 、ℎ 與 皆為定值,對此時間 的函數對變數 微分,由於 Fermat 原理在 此情況成立,因此我們需要找出使時間函數 的極值,滿足 = 0,於是我們得 到:
=
∙+
( ) ∙ ( )= 0
(4.1-6) 由圖中之夾角關係進而得到:=
(4.1.-7)25 除此之外,光在介質中行進速度與光在真空中行進速度 c 之間有一定的關係,w 透過 = 以及 = 的關係式代入上述之數學式,轉換後得到:
sin
=
sin
(4.1-8) 此為 Snell 定律,每當光在行進時遇到不同介質(即不同折射率)環境之間所形成 之界面時,皆需滿足此折射定律。 (二) 反射定律 圖 4.1-4 光的反射路徑 同樣的方法用於反射情況,光由 P 到 Q 其入射角和反射角分別為 和i r,其水 平高度 a,而垂直高度為 x 的函數,改變 x 的值光的路徑也隨之改變,因此光程 差為: ) ) ( ( ) ( OPD(x)n POOQ n lx 2a2 x2a2 (4.1-9) 同樣的須滿足 Fermat's 原理,因此對 x 微分可得: 0 ) ( ) ( dOPD(x) 2 2 2 2 2 a x x n a x l x l n dx (4.1-10) 再用夾角關係及簡化此方程可得: r i (4.1-11)
26 即可得反射定律,而反射又可分為 1. 鏡面反射 反射面如為極為光滑之平面,則能使方向一定之入射光線於反射後,其反射 方向亦為一定者,如圖 4.1-4(a)為理想之鏡面反射體反射,圖 4.1-4(b)為接近理想 之鏡面。 (a) 理想的反射 (b) 實際鏡面反射 圖 4.1-5 鏡面反射特性 2. 漫反射(Diffuse-Reflection): 反射面如為粗糙凹凸不平之表面,則入射光雖循一定之方向,但反射光線卻 向四周各方向反射,如圖 4.1-5(a)為接近理想之漫反射體反射,圖 4.1-5(b)為理想 之漫反射體反射。 (a) 理想的反射 (b) 實際漫反射 圖 4.1-6 漫反射特性 3. 全反射定律: 光線從密介質(折射率較大)進入疏介質(折射率較小)時,其折射將偏離法線, 如圖,入射角越大則折射角越大,折射偏離法線也越大,當發生折射線平行界面 時,亦即折射角為 90o 時,此時入射光線會全部反射回原介質,光線即不再從疏 介質射出去而無透射過界面之情形發生,此時稱之為『全反射』(T.I.R),而最初
27 發生全反射之入射角,稱之為臨界角 (critical angle),其表達式為: c 1 2 1 sin n n c (4.1-12) 圖 4.1-7 光的全反射示意圖 4.1.3 光追跡(Ray tracing) 當光線進入光學系統中利用光線追跡法去預測每條光線與界面間的相互關 係,並預測光線本身的行進方向,在傳統的透鏡設計中,無論是折射面或反射面, 都只用到了部份的球面,而且球面的中心點與光軸都在同一條直線上,又是軸對 稱的系統,因此可以透過較簡單且特殊的方法來設計,然而非成像光學中並非都 是對稱的系統,為了讓光線追跡法能夠適用於各種情況,這裡將反射定律與折射 定律用向量的方式來表現,在圖 4.1-7 中可以看到,入射光打到一反射面產生反 射光的情況。入射光與反射光皆以單位向量ˆ、ˆ表示,而反射面的法線方向則 是以單位向量 nˆ 來表示。藉由向量的方式我們可以將反射定律以向量的方程式表 示成: n nˆ ˆ)ˆ ( 2 ˆ ˆ (4.1-13) 當光線遇到反射面時,首先我們必須知道入射點位置與反射面的曲率,才能 推算其反射面的法線方向,進而將等式(4.1-10)代入,求得反射光線的方向,以 此類推就可以求得所有入射光線在與反射面作用之後,所有反射光線行進方向。
28 圖 4.1-8 以向量型式表現反射定律 如圖 4.1-9 所示,當光線從介質 1 入射到介質 2,光線會產生偏折的情況,n與 n 則是表示兩個介質的折射率,折射定律通常可以表示為式(4.1-6),如果將折射定 律用向量式表示,則可以得到: n n n nˆˆ ˆˆ (4.1-14) 經過整理之後,可以將上式變為: n n n n n n nˆ ˆ( ˆˆ ˆˆ)ˆ (4.1-15) 這就是在光線追跡法中最常使用的通式。 圖 4.1-9 以向量型式表現折射定律
29
4.2 照明理論基本概念
4.2.1 光展量(Etendue) 光展量[34]常用來評估照明系統的光效率,其簡單定義為面積乘上立體角為 定值,主要用來計算光學系統中光傳遞的幾何邊界,舉一個簡單的例子,光管每 一段均有不同的截面積,當光由較大截面之光管流入較小截面積之光管時,就必 須有較大之角度,否則就會有光漏出,反之若是光由小截面積進入大截面,則光 會完全傳遞而不減少,這樣的一個概念其實也只是一種估計,但仍有其準確性 在。 一個成像光學系統中,一個方型孔徑 P 邊長為 dx 和 dy 與P方型孔徑邊長為 x d 和 yd ,分別位於物空間z 位置以及像空間0 z 0位置,P位於直角座標 z) y, (x, 系統的 xy 平面上,P位於直角座標(x,y,z)系統的 zy 平面上。由 P 面 上發射出一條光線,其方向餘弦為(L,M,N), 而這條光線經過光學系統打到P面, 其 方 向 餘 弦 為(L,M,N) , 因 此 方 向 餘 弦 的 改 變 分 別 為(d1L,d1M,d1N)以 及 N) d M, d L, (d2 2 2 。 圖 4.2-1 光線傳遞在不變量理論之示意 P的立體角可以被計算出來,經由此無限小面積的基底向量互相外積,在與此 面積的法線向量(L,M,N)作內基即可求得,因此立體角可以被表達成:A
30 N M L N d M d L d N d M d L d d 2 2 2 1 1 1 (4.2-1) 計算上方行列式再將此守恆式LdLMdMNdN0代入,可得: y d x d x M y L y M x L N M Ld d M Ld d N ) ( 1 ) ( 1 d 1 2 2 1 (4.2-2) 再將上式改寫成 d (輻射通量): y d x dxdyd x M y L y M x L B( ) d (4.2-3) B 為P面上的亮度(radiance) ,我們可以利用相同的方法做反向計算可得: y d x dxdyd x M y L y M x L B( ) d (4.2-4) 假如此系統是一個理想系統,亦即無吸收無損耗,因此式(4.2-3)與式(4.2-4)是相 等的,所以可推得: 2 2 B B n n (4.2-5) 將式(4.2-5)帶入dd再利用 Jacobians 轉換即可得: ) ( ) ( n2 2 x M y L y M x L n x M y L y M x L ) , ( ) , ( ) , ( ) , ( n2 2 y x M L n y x M L (4.2-6)
31 n d c d d c dA os A os n2 2 利用 Liouville’s 理論,我們可以在兩端乘上
dxdyd
x
d
y
,上式可變為: M d L d y d x d n dxdydLdM 2 2 n (4.2-7) 此式即為 Lagrange invariant,我們可再將方向餘弦座標由直角座標系轉換到球座標系,即(L,M,N)(sinsin,sincos,cos)可得:
(4.2-8) 這個等式代表了一個完美成像系統中,光源與成像面上的影像之間光展量守 恆的狀況,由式子中,我們可看出光展量的大小,與光源面積大小和發散立體角 有關,但是值得注意的,在這式子當中並無與能量有關係的變數,因此光展量只 是單純針對面積與光束發散的角度,也就是說光展量是一個光線的幾何特性,而 跟光線所帶有的能量無關。 4.2.2 邊緣光線定理 對照明系統而言,目的就是將光的能量均勻地照射在目標上並保有最大的效 率,利用邊緣光線定理[35]可以幫助我們設計,邊緣光線的定義為通過面的邊緣 之光線,假設一長條光源打到一反射面如圖 4.2-2,由光源兩端點所發出的光決 定了整個照明的範圍區域,假若能對應到我所要照明之目標面的邊緣,那就表示 這樣的一個照明系統就是不會損失光的系統,能完全收集到光源的光,但是這樣 只能確保有其最高效率,卻未必是一個均勻打光的系統,像光線 a 只打到螢幕下 方而光線 b 只打到其上方,而中心的地方卻沒有由兩端點所發出的光,因此這是 個高效率但極度不均勻的照明例子。 圖 4.2-2 反射照明示意圖
32
設計方法與分析
第五章
5.1 規格介紹
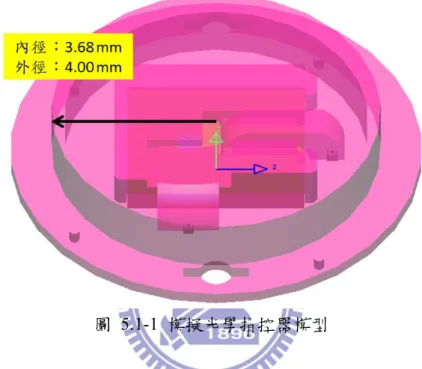
我們將 Cover glass 做成圓形,裡面涵蓋光源、光感應器、光導管、透鏡以 及機構件, 圖 5.1-1 模擬光學指控器模型總高度為 2.00mm,基座為 0.4mm,Cover glass 為 0.3mm,以及 LED 光源的高度 為 0.18mm,
33
Object space Object Height 0.5 mm
Wave length 870 ±5 nm
Object NA > 0.1
Optical space MTF 25 lp/mm(All field) > 0.6%
Distortion < 4%
Lens thickness > 0.2 mm
Center-edge ratio < 1.5
Image space Image circle 1.0 mm
Magnification 1
Resolution Programmable up to 3200 cpi
Pixel size 30 um Sensitive area 0.608×0.608 mm2, 0.540×0.540 mm2 表 5.1-1 光學系統規格 光導管之規格: 設計使用兩個光導管,將使整體數據上升,長光導管的距離(由 LED 光源中心點 到光感應器的中心點)為 3.5mm,另一個光導管為 2.5mm: 圖 5.1-3 光導管架構圖 其高度為 1.12mm(如圖 5.1-2),寬度無限制。
34 機構件主要目的為支撐光導管以及透鏡,並阻擋雜光進入光感應器,其結構 需估算實際製程能力,如:鑽孔的大小、機構件的厚度、考慮組裝公差和模具是 否會倒鉤等問題,這方面主要取決於製成的機器,以及企業的技術好壞。所以我 們只討論其大小限制在半徑 3.68mm 的圓圈內即可。
5.2 設計流程
光路設計中,主要要把光源發出的光通量收進來,再經由曲面一次反射到想 要的區域,目標是能把光均勻打在壓克力覆蓋片的表面。若手指按在壓克力表面 上,將使光反彈,所以打光區域需要均勻且亮度足夠,才能在手指反彈後,經過 光學系統,打入光感應器偵測手指移動方向。 設計流程先從光學系統開始,照明系統設計須考慮到光學系統所占用的空間, 以及光導管入射 Cover glass 的角度,是否打入透鏡裡,造成不必要的干涉。當 光學系統與照明系統合為一體,雖然容易形成干涉,需依靠機構件做修正,但在 成本以及組裝上來說,是較為便利。 光學系統所使用的透鏡,可以分為單透鏡以及雙透鏡,其目的都要使 MTF 的效能提高,也就是解析度提高,使得光感應器對手指的移動方向更準確、更靈 敏。最終再用繪圖軟題,將機構件畫出來,並重新在模擬有長機構的狀況下,與 當初模擬比較,因機構件而所損失的光展量如何避免或減少,再回頭看前面步驟 找出能耗問題、改善或重新設計,直至整體模擬結果達到我們的要求。5.3 均勻照明
5.3.1 理論介紹在這個部份的設計原理採用 Hao Xiang 在 2008 年所提出的 Freeform surface lens design for uniform illumination[36],這個方法只適用在光源能被等式(3.1-1) 所描述,所以大多利用在 LED 光源,但假如 LD 能用等式(3.1-1)所敘述也是可以 使用的,在本節做個簡單介紹,以光源所在位置為原點建立坐標系,如圖 5.3-1 所示,以發光二極體發光表面為 xy 平面,其法線為 z 軸,首先考慮二維情況, 以 xy 所在平面為例,則向量形式的折射反射定理可以改寫為: n n n)] N Out I I Out 2n( -n [1 2 12 (5.3 3-1)
35 在這裡 n 為自由曲面介質折射率,N為自由曲面在光線入射點 A 的法線方向,In 和 Out 分別為入射和出射光線,其中出射光線與目標平面相交於 B 點。 圖 5.3-1 自由曲面和入射出射光線幾何 假設 A 點為(x,0,z),B 點為(xd,0,H),則可得到: ) , ( ) , ( ) , ( dx dz N z x In z H x x Out d (5.3-2) 此時 dx 和 dz 分別是自由曲面在 x 和 z 方向分量的微分,H 是光源和目標面的距 離,將式(5.3-2)代入式(5.3-1)可得: ) ( ) ( ) , , (x z x nD B A nC f dx dz d (5.3-3) 其中 2 2 2 2 2 2 2 2 D C ) ( ) ( ) ( ) ( z x x z x z z H x x x x B z H x x z H A d d d (5.3 3-4)
36 為了求解等式(5.3-3),還需要一個附加的方程xd g(x,z),以在二者之間建立關 係,由於目標為在特定距離上的均勻照明,因此可以認為在目標面上的照度為 E 定值,因此: S E (5.3-5) 是照射在照明目標面上的總光強,S 為照明目標面積,為了實現最大效率的 光能利用率,必須使從光源出射的光強與照明目標面上的光強相等,即有: (5.3 3-6) 由於要達到均勻照明,因此在照明目標面 E 保持恆定,則照明目標面上特定區 域內的光強和整個照明目標面上光強之比與該特定區域的面積與整個照明目標 面積之比相等,假定整個照明目標面的半徑為 R,則在目標面上一個半徑為x 的d 範圍內的光強與整個照明目標面的光強之比即為 2 2 R xd ,如圖 5.3-2 所示。而在 另一方面,從光源的角度進行考慮,在發散半角為的光錐內射出的光線,其總 光強相對於全部光強的比例為 1 1 max cos 1 cos 1 m m 。根據邊緣理論定理,只 需要考慮一束光線的邊緣光線位置即可以確定整束光線的所處的位置範圍,基於 上述原理關於光源與照明目標面之間的關係,有以下幾種模型可以描述: (a) 正向照明模型 (b) 逆向照明模型 圖 5.33-2 照明模型 (一) 正向照明模型:
37 在該照明模型中,以 z 軸為中心軸,從光源發出的沿 z 軸的光線經過自由曲 面折射後方向不變,仍將傳播到照明面的中心,更靠近 z 軸(即 值較小)的光 錐內的光線其對應的照明區域也更加靠近內部,而遠離 z 軸(即 值較大)的光 線,其對應的照明區域也更加靠近照明面邊緣,最終處於最大發散半角的光線將 最終照射在照明目標面的邊緣,在這種模型情況下可表達為: (5.33-7) 再將上式改寫: (5.33-8) (二) 逆向照明模型: 該模型與正向照明模型正好相反。其特點是以 z 軸為中心軸,從光源發出的 沿 z 軸的光線經自由曲面折射後將改變方向射向照明目標面邊緣,更靠近 z 軸(即 值較小)的光錐內的光線其對應的照明區域也更加靠近邊緣,而遠離 z 軸(即 值較大)的光線,其對應的照明區域也更加靠近照明目標面 D 的中心,在這種 模型下有: (5.33-8) 再將上式改寫: (5.33-9) 根據所選定的照明模型,可以將對應的x 表達式代入等式(5.3-3)中進行化簡,最d 終可以得到微分式dz dx關於 x 和 z 的顯式表達式dz dx f( zx, )。但是由於函 數 f( zx, )的表達式往往比較複雜,直接求解該方程的解析表達式具有很大的難 度,可行的解決方案是使用數值方法進行求解。 設定自由曲面與 z 軸交點的坐標值(0,0,z0)作為初始邊界條件,即可使用數 值方法進行求解,常見的方法包括差分法,Euler 法和 Runge-Kutta 法。其核心原 理都是使用周圍點的坐標來對特定求值點的切向和法向分量進行擬合,進行多次 迭代,最終達到求解特定區域內數值解的目的,相對而言差分法和 Euler 法的表 2 2 max 1 0 1 0 ) cos 1 ( I ) cos 1 ( I R E x E d m m
max 1 1 cos 1 cos 1 m m d R x 2 2 max 1 0 1 0 max 1 0 ) cos 1 ( I ) cos 1 ( I -) cos 1 ( I R E x E d m m m max 1 max 1 1 cos 1 cos cos 1 m m m d R x38 達式更為簡潔,具有更快的計算速度,但是由於這兩種方法往往僅選擇較少的周 圍點進行計算,因此在精度上存在缺陷。考慮到自由曲面對精度的要求較高,而 數值計算方法在精度誤差上存在累積效應(即隨著計算的推進,迭代計算的精度 將越來越低),因此選擇相對最為精確的 Runge-Kutta 法進行數值求解計算。 Runge-Kutta 法是一種基於 Tayler 公式演化而來的一種迭代計算方法,其表達式 按照階數的不同分為很多種,階數越高的 Runge-Kutta 表達式其計算結果越為精 確,但與此同時高階的 Runge-Kutta 表達式也更加複雜,需要更長的計算時間才 能得到最後的結果,以往的經驗表明四階 Runge-Kutta 表達式已經能夠提供足夠 的計算精度,同時也可以在較短的時間內完成需要的計算 ,這裡給出四階 Runge-Kutta 的表達式: (5.33-10) 其中 (5.33-11) 其中 h 為迭代步長,經過計算可以得到自由曲面在 xz 平面的軌跡,將其繞 z 軸 旋轉一周即可得到完整的自由曲面面型。
5.4 不漏光的理想曲面
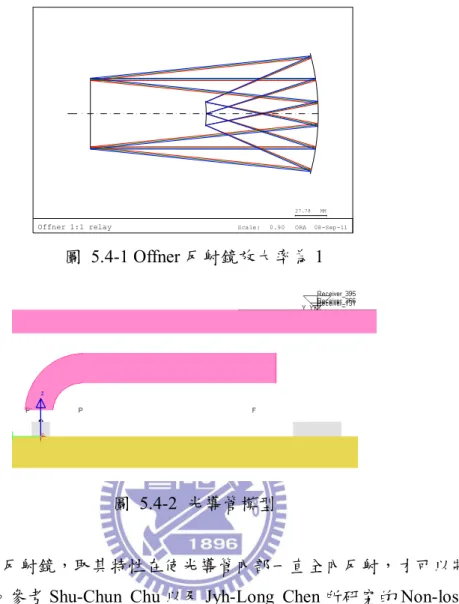
在上一節提到使光均勻的往上打,但是其目標物並不一定在其正上方,因此光管 一定會有個彎曲弧度,藉以將光平移到想要的位置上,因此在本節探討如何設計 出一個不漏光的全反射面,藉以達到最高效率。 5.4.1 構想及分析 如何讓一個曲面不漏光,即代表光所入射的曲面皆為全內反射,其構想來自於 Offner 反射鏡光學系統[37],讓光一直做全內反射,所以先劃出內徑,而外徑的 曲率為內徑的兩倍(如圖 5.4-1), ) , ( ) 2 , 2 ( ) 2 , 2 ( ) , ( 3 4 2 3 1 2 1 hk z h x f k k h z h x f k k h z h x f k z x f k k k k k k k k k ) ( 6 1 2 3 4 1 k k k k h z zk k 39
圖 5.4-1 Offner 反射鏡放大率為 1
圖 5.4-2 光導管模型
雖然 Offner 為反射鏡,取其特性在使光導管內部一直全內反射,才可以將光送 到指定的區域。參考 Shu-Chun Chu 以及 Jyh-Long Chen 所研究的 Non-loss bent light pipe with an equiangular spiral[38]論文,討論等角螺旋線形彎曲不漏光光導 管將導入光線的入射角加以篩選,能夠選取出某個範圍的入射角度在光導管內導 光過程中,每次撞擊到光管表面都能發生反射,並使得其反射行為持續在光導管 內行進。 由於 LED 光源到壓克力濾光片的高度只有 1.1mm,所以我們必須延伸光導 管的長度,只要各角度的入射角皆大於全反射角即表示此曲面為一個理想的反射 面,所以首先要決定一個邊界條件,其邊界為入射角等於 的點,因為大於c 只c 要是平面就會達到全反射,而其空間高度 h 在設計前就已經被限制住即 z 的邊界, 假設光源位置在(0,y,0),所以可以計算出此邊界的 x 位置(在此不考慮 y 方向, 因為光只有平移在 x 軸,y 軸幾乎不會漏光),所以可以得到初始點: h) , tan (h ) z , (x0 0 c (5.44-1) 利用此點去做迭代計算,可分成兩個部分一個為x0和x0,然後在其區域上 作等分角之動作如圖 5.4-3
Offner 1:1 relay Scale: 0.90 ORA 08-Sep-11
40 圖 5.44-3 x0的光源等分角示意圖 其等分角為c n1和90 n 2,其中n1和n2為等分的間隔數,也就是說x0有n11 個點而x0有n21個點,而 n 為整數由 0 到n 1 n2,其 x 與 z 的關係可得: (5.44-2) 除了等分角度外,此角度上的點也要對應到使之能夠全反射的切線斜率,由此構 成一個全反射面,在此設計讓每條光線與切面的夾角皆在同角度,在(x0,z0)此 點切線斜率需要等於 0 或大於 0,而其它點的斜率隨著發光角度的不同也需要調 整,其斜率角度每隔一個點要加上c n1度如圖 5.4-4 圖 5.4-4 x0前兩點的斜率示意圖 因此可以得到: 1 1 2 1 1 )) ( 90 90 tan( ) 90 tan( n n n n n z x n n n n z x n n c c n n 1 1 2 1 1 1 1 1 1 ) ) ( 90 45 tan( ) 90 tan( n n n n n x x z z n n n n x x z z n n n n c n n n n
41 (5.44-3) 利用邊界點 h=0.7 和 45 c代入式(5.4-1)求得 x,再用式(5.4-2)及式(5.4-3) 進行迭代解出z 和n x ,再將這些點連起來即為理想不漏光之曲面,特別需要注n 意的是選取點的數目,因為點是決定切線斜率以及等分角之大小,因此切的越細 越能把角度正確對應到正確切線的平面上,其結果展現在圖 5.3-3 圖 5.44-5 不漏光之曲面 可以清楚發現左半邊為一個倒鉤的表面 , 這在製程上幾乎很難做到, 而在 LightTool 中建此模型也很難做到,唯一的方法是利用 CAD 畫圖再轉檔成 LightTool 檔,可是因為使用的是教育版本,所以無法利用此功能而因此作罷, 但是可以利用曲率以及非球面係數去建構此表面函數,可是這是一個奇怪的曲面 所以只有一小段能符合,盡量讓中間的光能反射,因為中間的光能量最強。 由於材料為 PMMA,其折射率為 1.48(當波長為 850nm),從 snell 定律公式 導入: n1×sin = n2×sin (5.4-4) 其中 n1為 PMMA,n2為空氣。 若 LED 光源平行入射,將把 為 90 度, 為 42.5 度;所以當曲面反射角度設 定為 45 度,基本上光將會全反射。而不是中央光線的區域,利用 CODE V 設計 優化一個有曲率的表面,使得打在其上的光,皆能全反射並將光打到我們所需要 的地方。但是轉成 LightTools 檔案,還是會有些許計算上的誤差,下圖就是所模 擬的光線分布,透過光線模擬可以讓我們找出光導管設計的問題或缺陷。
42 圖 5.4-6 模擬光線路徑 有了足夠的光展量,接下來就是控制光打向我們所期望的區域。 利用出光面的切口,將控制我們的光打向何處,因為光感應器到壓克力濾光片的 中間,是我們要擺放光學系統的位置,所以光導管的長度不宜太長,其出光口的 入射到壓克力濾光片的角度也不能太小,以免擋到透鏡,影響成像品質。 5.4.2 進階應用與探討 建立在 LightTool 中之螺線管 圖 5.44-7 光管例子-螺線管 其遠場光場及能量分佈如圖 5.3-16 及圖 5.3-17,其效率為 75%,一開始大場角的 光一定是很難收到的,因為此例光源表面與光管入口是貼平的,因此正負 10 度 的光是必然會漏光的,所以在這麼多彎曲的表面上傳的還能有保有 75%,代表此 理論有其準確性。
43 圖 5.44-8 遠場分佈 圖 5.44-9 光強分佈
5.5 光學系統
依照光學指控器的要求,我們將設計物像比為一比一的光學系統,在設計過 程中需考慮成像品質、像差、亮度和空間大小。而像差是光學中,實際像位理想 像位的偏離,理想像位是根據單透鏡理論所計算出的理想狀態,在真實狀況中, 透鏡的表現並非十全十美,因製程過程而有些許偏差。成像品質決定光學設計的 好壞,介紹其判斷標準,藉由設計方法,修正成像品質,以達到標準值。 像差有分為:球面像差、慧形像差、像散、場曲以及激變。實際上我們做不出完 美的球面透鏡,雖然成像有像差,若其誤差值非常小,導致人眼無法辨識,將可 運用其設計在於光學指控器上。44 5.5.1 解像力(Resolution) 解像力又稱解析度,簡單來說用量度和計算影像,從清晰到模糊之間的轉換 點。受限於光學、材料和其他種種因素,每一個鏡頭或數位相機都有其分辨能力 的極限。解像力就是應用科學的方法將這個極限找出來,進而評斷成像品質的好 壞。 為了可以清楚地計算解像力的數據,目前使用歷史最悠久,同時也是最多人 採用的 MTF(Modulation Transfer Function)作為基礎的測試程序。MTF 主要是 引進反差對比的概念來檢定鏡頭解像力, 使用者必須對 「空間頻率/Spatial frequency」這個概念進行瞭解。所謂空間頻率為 1mm 的寬度中(或是等寬的其他 單位),正弦函數變化反覆的次數(如同海浪波形變化) 銳利度和反差的對比 「空間頻率 / Spatial frequency」由小--->大 (原始尺寸)_1 (1X 放大)_2 (3X 放大)_3 模擬拍攝 ISO12233 以目測 法判斷相機鏡頭的解像力 100%的反差比,只有 在理想狀態下才可能 出現。 鏡頭解像力較差 ,但對比反差尚 可。 解像力和反差均無法對 (表示鏡頭已達極限) 圖 5.5-1 空間頻率表示圖 MTF = 原本充足的反差可以很容易辨識出兩條線,當空間頻率加大時,也就是線條越緊 密時,反差也逐漸縮小,終於返差到衰減到全部變成灰色,再也分辨不出黑白條 紋,表示鏡頭的解像力已經到極限(如上圖所示)。 早期的鏡頭精細度還沒有達到現代的標準時,解像力測試圖可以說相當簡單, 甚至使用至今日家庭用的印表機設備都可以輕易複製。最早的標準MTF系列中, 首推 USAF1951,這是美國空軍於 1951 年所開發。主要適用於偵照設備的檢測,


![圖 3.1-4 Lumileds Luxeon High-Power LED[25]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8210547.170005/28.892.138.727.112.480/圖-lumileds-luxeon-high-power-led.webp)
![圖 3.1-5 ICP 10×10 AIN COB 基板[26]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8210547.170005/29.892.124.759.282.868/圖315ICP1×1AINCOB基板26.webp)