國
立
交
通
大
學
電控工程研究所
碩
士
論
文
CNC 剛性攻牙製程之同步運動控制器
設計與實現
Design and Realization of Synchronized Motion
Controllers for CNC Rigid Tapping Procedures
研 究 生:葉釗甫
指導教授:徐保羅 博士
CNC 剛性攻牙製程之同步運動控制器設計與實現
Design and Realization of Synchronized Motion Controllers for CNC
Rigid Tapping Procedures
研 究 生:葉釗甫
Student:Chao-Fu Yeh
指導教授:徐保羅 教授
Advisor:Dr. Pau-Lo Hsu
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering College of Electrical Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master in
Electrical and Control Engineering
July 2011
Hsinchu, Taiwan, Republic of China
i
CNC 剛性攻牙製程之同步運動控制器設計與實現
研究生:葉釗甫 指導教授:徐保羅 博士國立交通大學電控工程研究所
摘要
本論文發展以間接向量控制架構,實現感應馬達之速度及位置閉迴路控制。 並針對感應馬達的重要轉子時間常數,設計一套自動調整方法,找到最接近的數 值使響應達到最好。另外,為了克服馬達在高速時被反電動勢限制的問題,在 110 V 電源下,本研究使用了弱磁控制,將轉速達成由 900 rpm 提升到 4000 rpm。 在整合感應主軸馬達與伺服馬達為 CNC 剛性攻牙系統上,因為兩軸馬達的 響應差異甚大,導致同動誤差也大,使得加工出來的螺紋並非我們所要的,更嚴 重者會有發生崩牙的危險。因此,我們導入了交叉耦合控制器 (cross-coupled control, CCC),藉著補償器所產生的補償訊號,協調兩軸並消除同動誤差。而當 攻牙至孔底時,馬達會遇到最大靜摩擦力的問題,兩軸所受到的摩擦力不同使同 動誤差變大,在此,我們加入了非線性摩擦力補償器 (nonlinear friction compensation, NFC),根據建立好的非線性摩擦力曲線決定補償值。此外,機台 在運轉時會受到各種原因的干擾,導致機台抖動的現象,在此我們加入了擾動觀 測器 (disturbance observer, DOB),可以在不需要知道干擾的原因下,即可補償相 對應的擾動量。其同動誤差可由 132 um 改善至 4.4 um. 最後,本研究發展將原始的交叉耦合控制器架構做重新推導,提出新的位置 模式交叉耦合控制器 P_type CCC,使其架構更容易在一般市售的驅動器上實現。 並且和原有的速度型交叉耦合控制器 V_type CCC 做比較,新的架構對網路時間 延遲的容忍度較高,不易發散。因此,新發展的位置型耦合式控制器更適用於網 路系統之高速精密 CNC 攻牙機。 關鍵字 : 剛性攻牙、感應馬達、P_type CCCii
Design and Realization of Synchronized Motion
Controllers for CNC Rigid Tapping Procedures
Student : Chao-Fu Yeh Advisor : Dr. Pau-Lo Hsu
Department of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
Closed-loop control in both position and velocity loops for induction motors (IM) applying the indirect field oriented control scheme is implemented in this study. For its rotor time constant which is an important parameter but cannot be directly measured, a practical auto-tuning strategy to estimate its value is proposed in this Thesis. Furthermore, limitation of the motor speed due to the back electromagnetic force is overcome by applying the field weakening control to increase its maximum speed from 900 rpm to 4000 rpm as 110 V was provided. In general CNC rigid tapping machines, performance of the spindle axis implemented with an induction motor and the Z axis implemented with a servo motor are not matching well in dynamic responses; thus, significant synchronized motion error exists. Therefore, the tapping tool is broken easily and its machining quality is seriously degraded due to the significant error. In this study, the cross-coupled control (CCC) was applied to coordinate these two axes in tapping machining procedures. When the tapping tool reaches the bottom of the hole, maximum static friction will then deteriorate control performance. A nonlinear
iii
friction compensator (NFC) is then proposed to generate a suitable compensated value which is determined according to the nonlinear friction curve. Moreover, as the machine vibration and other undesirable external disturbance and modeling error are significant, a disturbance observer (DOB) is then applied to estimate and compensate for the lumped disturbance. Thus, the taping precision is greatly improved by applying the proposed advanced motion control. Results indicate that the synchronized motion error is thus greatly reduced from 132 um to 4.4 um by applying the proposed motion controller.
Finally, the newly proposed positional type CCC (P_type CCC) is developed in this Thesis. This newly developed CCC control structure is easier to be implemented on industrial motor drives with more tolerance in network delays. Consequently, the proposed P_type CCC is more applicable in high-speed-high-precision CNC rigid tapping machines under real network implementation.
iv 誌謝 首先要感謝我的指導教授徐保羅老師這兩年來對我的指導,讓我在研究上遇 到瓶頸與挫折,或是迷失方向時,能夠找到正確的出路,使我能順利的完成碩士 學位。同時也要感謝口試委員李安謙老師、葉賜旭老師對於本論文的批評指正, 以及寶貴的建議,使得本論文更加完整。 亦感謝實驗室的學長、同學與學弟們:博士班賴建良學長、謝鎮州學長、黃 煒生學長,平時給我的指導與幫助,以及徐煒智學長、許正忠學長、施子強學長、 蕭任斌學長、張孟哲學長給我的寶貴意見及解惑,政宏、子期、軒正、思翰、志 瀚、信佑在學業上的相互切磋與指教,並且時常分享生活趣事讓實驗室充滿歡笑 與活力。特別對賴建良學長、黃煒生學長、新代科技公司以及政宏、軒正、子期、 志瀚在研究與實驗上的大力幫忙,獻上誠摯的感謝。 最後要感謝所有關心我的父母、姊姊以及家人,長久以來在我生活上的支持 與鼓勵,使我能全心全意的專注在課業與研究上,願將此榮耀與喜悅和他們一起 分享。
v 目錄 摘要 ... i ABSTRACT ... ii 誌謝 ... iv 目錄 ... v 圖目錄 ...vii 表目錄 ... ix 第一章 緒論... 1 1.1 研究動機與目的 ... 1 1.2 問題陳述 ... 1 1.3 研究方法 ... 3 1.4 論文架構 ... 4 第二章 感應馬達控制架構... 5 2.1 感應馬達數學模型 ... 5 2.2 座標轉換 ... 6 2.3 間接向量控制 ... 9 2.4 轉子常數的自動調整 ... 11 2.5 弱磁控制 ... 14 第三章 精密運動伺服控制... 17
3.1 零相位誤差追跡控制器 (zero phase error tracking controller, ZPETC) ... 17
3.2 交叉耦合控制器 (cross-coupled controller CCC) ... 20
3.2.1 直線路徑 (Linear Contour) ... 21
3.2.2 補償器設計... 22
3.3 非線性摩擦力補償器 (nonlinear friction compensation, NFC) ... 28
3.3.1 摩擦力介紹與對系統產生的影響 ... 28
vi
3.4 擾動觀測器 (disturbance observer, DOB) ... 32
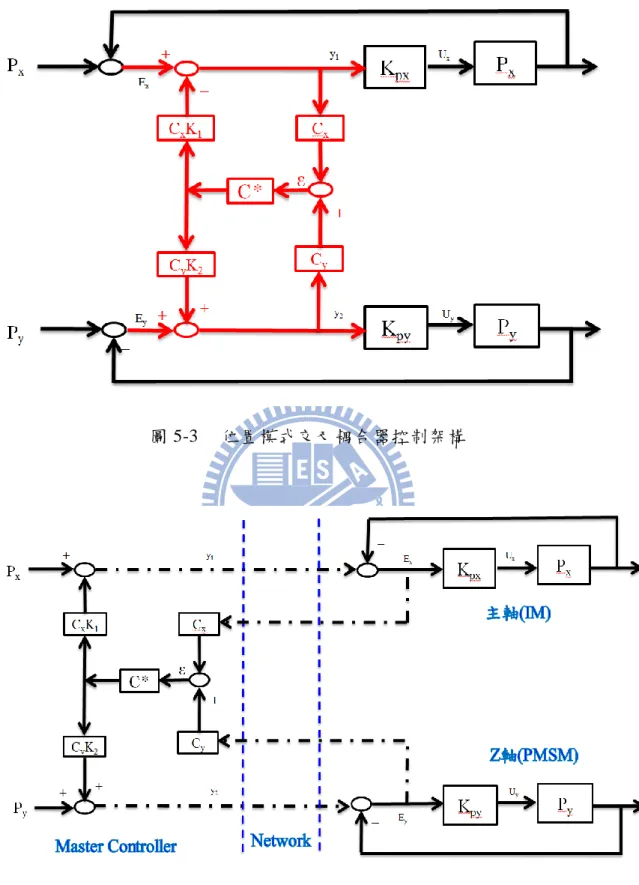
第四章 實驗結果... 40 4.1 攻牙流程 ... 40 4.2 模擬結果 ... 41 4.2.1 Z 軸追隨主軸 ... 41 4.2.2 交叉耦合控制器單軸補償... 41 4.2.3 交叉耦合控制器雙軸補償... 42 4.3 實驗結果 ... 43 4.3.1 雙軸獨立控制... 44 4.3.2 加入 ZPETC 實驗 ... 47 4.3.3 加入 CCC 實驗... 47 4.3.4 加入 CCC+NFC 實驗 ... 50 4.3.5 加入 CCC+NFC+DOB 實驗 ... 52 4.4 摩擦力改變 ... 55 4.5 主軸速度改變 ... 57 4.6 小結 ... 57 第五章 位置模式交叉耦合控制器... 60 5.1 架構推導 ... 60 5.2 網路延遲分析 ... 64 5.3 網路延遲實作結果 ... 66 5.4 攻牙命令實驗結果 ... 67 5.5 P_type CCC 實現於 CNC 攻牙機 ... 70 5.6 小結 ... 73 第六章 結論... 75 參考文獻 77
vii 圖目錄 圖 2-1 馬達於複數平面上的靜止與同步旋轉座標系統... 7 圖 2-2 感應馬達整體控制架構... 11 圖 2-3 不同轉子時間常數下的速度響應... 13 圖 2-4 轉子電感與上升時間的關係... 13 圖 2-5 轉子電感初始值為 44.45mH 的自動調整過程... 14 圖 2-6 轉子電感初始值為 3H 的自動調整過程 ... 14 圖 2-7 馬達動態模型... 15 圖 2-8 弱磁控制中電流與速度關係... 15 圖 2-9 未加入弱磁控制的速度響應... 16 圖 2-10 加入弱磁控制後的速度響應... 16 圖 3-1 ZPETC 基本架構圖 ... 17 圖 3-2 Z 軸位置閉迴路加入 ZPETC 前後之頻率響應的模擬結果 ... 20 圖 3-3 可變增益交叉耦合控制器結構圖... 21 圖 3-4 直線路徑之輪廓誤差... 22 圖 3-5 簡化後不含交叉耦合控制器的運動控制系統架構... 23 圖 3-6 簡化後整合交叉耦合控制器的運動控制系統架構... 23 圖 3-7 分式函數 K 的頻率響應 ... 26 圖 3-8 轉移函數 CK(C=2)頻率響應 ... 27 圖 3-9 補償器設計前後的頻率響應比較... 27 圖 3-10 輸入弦波補償器設計前後的比較... 28 圖 3-11 無摩擦力補償之一般馬達控制之速度迴路... 30 圖 3-12 前饋式非線性摩擦力補償器架構... 30 圖 3-13 非線性摩擦力曲線... 31 圖 3-14 加入 NFC 後速度響應補償 ... 32 圖 3-15 DOB 的控制架構 ... 33 圖 3-16 DOB 實驗的速度命令與干擾訊號 ... 36 圖 3-17 馬達空載及無干擾訊號時的速度響應... 37
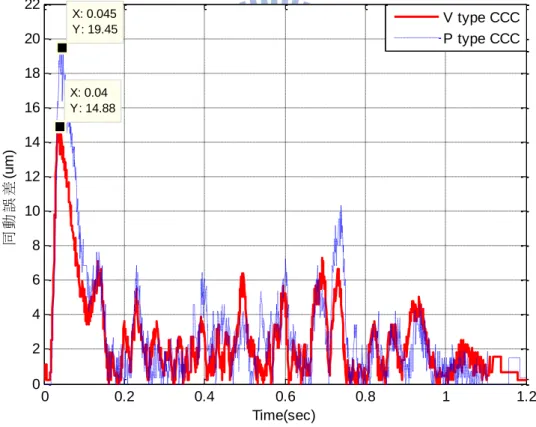
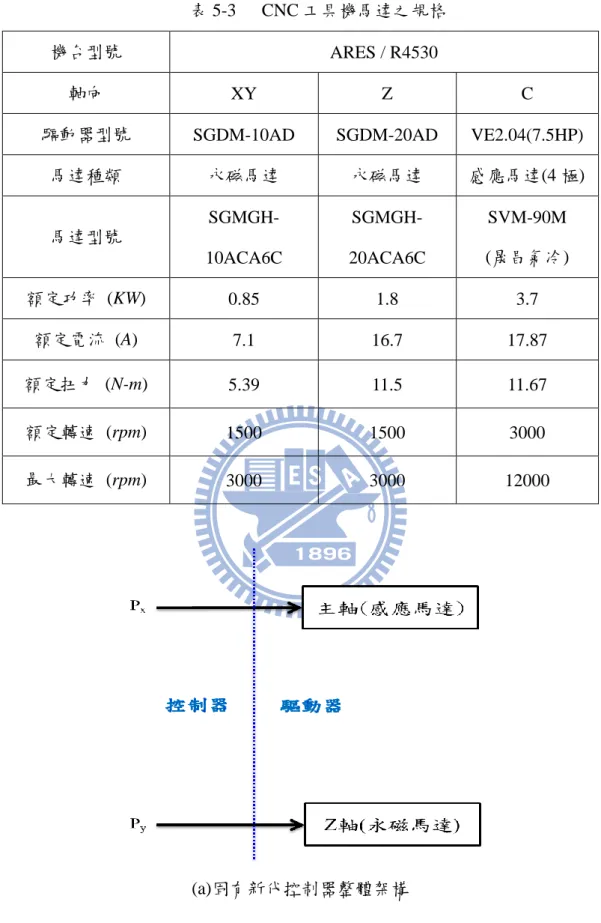
viii 圖 3-18 加入干擾訊號後的速度響應... 37 圖 3-19 估測干擾訊號... 38 圖 3-20 加入 DOB 補償後的速度響應 ... 38 圖 4-1 攻牙流程... 40 圖 4-2 Z 軸追隨主軸的系統架構 ... 41 圖 4-3 交叉耦合器之單軸補償簡化架構圖... 42 圖 4-4 主軸攻牙命令... 43 圖 4-5 實驗平台... 44 圖 4-6 雙軸獨立運作時的同動誤差... 45 圖 4-7 主軸與 Z 軸速度 1000rpm 步階響應 ... 46 圖 4-8 加入 ZPETC 後的同動誤差 ... 47 圖 4-9 單軸和雙軸補償的同動誤差... 48 圖 4-10 加入交叉耦合控制器後的同動誤差... 50 圖 4-11 加入 CCC 和 NFC 的同動誤差 ... 51 圖 4-12 加入 CCC、NFC 和 DOB 後的同動誤差 ... 53 圖 4-13 雙軸獨立控制與加入整合控制器響應比較... 54 圖 4-14 加入整合控制器後的整體架構... 55 圖 4-15 新估測非線性摩擦力模型... 56 圖 5-1 含有網路傳輸的傳統 V_type CCC 架構 ... 60 圖 5-2 補償位置提前到增益之前... 62 圖 5-3 位置模式交叉耦合器控制架構... 63 圖 5-4 位置模式交叉耦合控制器含有網路的架構... 63 圖 5-5 P_type 和 V_type CCC 的同動誤差 ... 67 圖 5-6 V_type CCC 架構下不同取樣時間的同動誤差 ... 68 圖 5-7 雙軸獨立控制與加入 P_type CCC 整合控制器響應比較 ... 69 圖 5-8 CNC 攻牙機 ... 70 圖 5-9 CNC 攻牙機整體控制架構 ... 72
ix 表目錄 表 4-1 改善雙軸特性不同之方法比較... 42 表 4-2 加入伺服控制器後的最大同動誤差... 53 表 4-3 摩擦力變大使用新舊模型的最大同動誤差(um) ... 56 表 4-4 主軸在不同速度下的最大同動誤差(um) ... 57 表 5-1 不同網路延遲的最大同動誤差... 65 表 5-2 不同網路延遲的最大同動誤差(um) ... 66 表 5-3 CNC 工具機馬達之規格 ... 71 表 5-4 CNC 工具機空載測試結果(um) ... 72 表 5-5 CNC 工具機實際攻牙結果(um) ... 73
1
第一章
第一章 緒論
1.1
研究動機與目的
隨著工業的進展,製造業目前已處於時間與品質並重的時代,因此目前自動 化製造設備一直朝向高速高精度的方向發展。在傳統的可動式浮動攻牙中,是藉 由機構的方式補償主軸與 Z 軸之間的追蹤誤差,由於採用機構補償的方式,所 以加工速度不能太快。因此大部分都採取剛性攻牙[1-2],其補償方式採用伺服控 制補償追蹤誤差,加工的速度與精度可以大大的提升,刀具的磨耗也可降低 一般用來切削的馬達稱為主軸馬達,主要功能為帶動刀具高速旋轉,以達到 切、磨、割等動作。在專用控制器(如 FANUC、三菱、西門子..)所使用之主軸馬 達均為伺服主軸,響應快,馬達性能佳。但缺點為價格高且頇搭配其所設計之控 制器,成本大增。國內工具機廠所進口之控制器往往佔了整體成本的 1/3,所以 降低控制器整體價格一直是業界努力的目標,其中將伺服主軸改成變頻主軸為主 要降低成本的方法之一。此外網路通訊在自動化工廠也日趨重要,因為訊息已變 得大量且即時。所以結合網路與多軸控制系統,成為目前的趨勢。 攻牙在加工過程中,主軸與 Z 軸必頇維持一定的位置比例,也就是主軸每 旋轉一圈,Z 軸必頇位移一個節距(pitch)。但是主軸與 Z 軸分別使用的是感應馬 達和永磁馬達,兩者響應不同使雙軸無法同步,並且整體機台還存在著摩擦力以 及擾動等非線性因素。因此如何建立攻牙策略降低同動誤差,為本論文的重點。1.2
問題陳述
(1) 主軸與 Z 軸響應不同 攻牙過程中,主軸和 Z 軸需要密切的配合,兩軸之間的位移關係為一直線。 若是沒有達到此直線關係,攻牙出來的比例就會不對,整體的輪廓誤差變大,更 嚴重的甚至會造成崩牙,一旦崩牙後續的處理更是耗費成本及人力。要維持兩軸2 位移關係為一直線,兩軸必頇同動,但每顆馬達的特性都不一樣,尤其主軸(感 應馬達)和 Z 軸(永磁馬達)的特性更是不同。感應馬達因為有滑差的關係,響應 比永磁馬達慢,而整個攻牙過程大部分時間都是在加減速狀態,若是分別下命令 控制,同動特性差會導致位移關係並非我們想要的直線。 (2) 非線性摩擦力 馬達由靜止起動時,需克服最大靜摩擦力,此外在運轉時也會存在著動摩 擦力。而每顆馬達受到的摩擦力都不相同,主軸的負載只有切削刀具,因此摩擦 力較小,但 Z 軸在運轉時會帶動轉軸移動機台,轉軸之間的摩擦力較大。摩擦 力會使馬達要運轉時延遲一小段時間,因此在孔底時,雙軸因摩擦力不同導致起 動時間不同,同動誤差變大。 (3) 機台擾動 馬達在運轉時一定會產生擾動,擾動的原因有很多,包含馬達自身的抖動、 訊號干擾、機台抖動等等。這些擾動都是非線性因素,兩軸的位移關係會不是我 們要的直線,而是在直線附近上下抖動,使攻牙出來的螺紋不平順,同動誤差也 會因此變大。 (4) 一般驅動器難以實現 通常改善同動之間的問題所使用的方法為交叉耦合控制器(CCC),但是原 始的交叉耦合控制器將補償值由速度迴路輸入,一般使用現成購買的驅動器時, 提供的基本功能無法支援,需額外在撰寫程式才能將以實現。
3
1.3
研究方法
(1) 使用交叉耦合控制器補償兩軸特性不同 改善多軸之間因為特性不同而造成的不同步現象,最常使用的就是交叉耦 合控制器。事實上交叉耦合控制器並無法直接改變各軸的運動控制迴路,而是將 將各軸的追跡誤差同時納入考量,藉由補償器產生適當的回授信號,送至各軸使 得動態響應能夠匹配。 (2) 非線性摩擦力補償器 對於機械設備中存在著摩擦力的問題,採用前饋式非線性補償器補償非 線性摩擦力,而非線性補償器是由 off-line 的方法識別出之非線性曲線來加 以補償。 (3) 擾動觀測器 為了解決多個原因導致的擾動問題,使用擾動觀測器觀測出受到的擾動 量,並加以補償。使用此方法並不需要知道擾動的原因,只需將對應的擾動 量從輸入訊號扣除,即可有效的抑制外部擾動。 (4) 位置模式交叉耦合控制器(Positional type CCC) 本文將原有的交叉耦合控制器架構做一些推導改變,使原本從速度迴路 的補償值改由位置命令輸入,如此便可輕易的在一般市售的驅動器上實現。 在沒有網路延遲的情況下,新推導架構的補償效果較原始架構略差,但是當 網路延遲變大後,新架構反而比原始架構好並且網路延遲的容忍度也較高。 在本文中將以新設計位置迴路耦合控制器 P_type CCC 和傳統之速度迴路耦 合控制器 V_type CCC 做一比較4
1.4 論文架構
本論文共分六章,第一章簡述研究的動機與目的,並陳述研究的問題和 方法。第二章介紹感應馬達的模型推導、座標系統轉換、控制架構、轉子常 數調整以及弱磁控制。第三章介紹攻牙的策略,各個策略的理論推導和架構, 以及各自達成的效果。第四章介紹在實際雙軸馬達攻牙運轉上實現各個策略 的效果。第五章推導新提出的交叉耦合控制器架構,並分析和原始的交叉耦 合控制器架構之間的差異及優缺點。第六章對於本研究成果做分析探討與結 論。5
第二章
第二章 感應馬達控制架構
本章將分析感應馬達的特性,並推導感應馬達(induction motor, IM)在其
定子座標軸(as, bs, cs)下的電壓方程式與轉矩方程式。但傳統以三相變數代表 的馬達數學模型相當複雜,且在轉子與定子之間會有非線性的效果。因此配 合座標系統的轉換,將電壓的動態方程式轉換至與轉子同步的(d-q)軸座標系 統,以簡化感應馬達的動態模型。最後介紹轉子常數的自動調整以及弱磁控 制,達到最快的響應和高速控制。
2.1 感應馬達數學模型
為了達到感應馬達控制目的,我們先對於感應馬達數學模型進行分析。 首先以三相二極的感應馬達來做馬達數學模式推導[3],定子電壓、電流以及 磁交鏈(flux linkage)方程式如下 3 2 3 2 3 2 j cs j bs as s v v e v e v (2-1) 3 2 3 2 3 2 j cs j bs as s i i e i e i (2-2) 3 2 3 2 3 2 j cs j bs as s e e (2-3) 單相定子磁交鏈可以表示成 ) 3 2 cos( ) 3 2 cos( ) cos( ) 3 2 cos( ) 3 2 cos( ) ( r cr sr r br sr r ar sr cs ms bs ms as ms ls as i L i L i L i L i L i L L (2-4) ) 3 2 cos( ) cos( ) 3 2 cos( ) 3 2 cos( ) 3 2 cos( ) ( r cr sr r br sr r ar sr cs ms as ms bs ms ls bs i L i L i L i L i L i L L (2-5)6 ) cos( ) 3 2 cos( ) 3 2 cos( ) 3 2 cos( ) 3 2 cos( ) ( r cr sr r br sr r ar sr bs ms as ms cs ms ls cs i L i L i L i L i L i L L (2-6) 而
Lls : leakage inductance of stator for per-phase
Lms : mutual inductance of stator for per-phase
Llr : leakage inductance of rotor for per-phase
Lmr : mutual inductance of rotor for per-phase
Lsr : mutual inductance between stator and rotor for per-phase
通常 Lsr和 Lms是相等的,將(2-4)-(2-6)代入(2-3) ls ms s ms r s L L i L i 2 3 ) 2 3 ( (2-7) ms m ms ls s L L L L L 2 3 2 3 (2-8) 感應馬達的單相定子和轉子電壓方程式可表示為 as as s as dt d i R v (2-9) ar ar r ar dt d i R v (2-10) 定子和轉子電壓方程式可以結合成一個矩陣的型式 r s r s r s r s dt d I I R R V V 0 0 (2-11)
2.2 座標轉換
2-1 節推導出的感應馬達數學模型中,其方程式具有非線性特性,且數學 模型十分地複雜,對於建構系統控制架構上產生困難。在此我們可將複雜的 非線性馬達數學模型,利用座標轉換的技巧,由靜止座標系統的馬達數學模 型轉換至同步旋轉座標系統之下的 d-q 軸模型,在同步旋轉座標系統之下的7 d-q 軸馬達數學模型將比靜止座標系統之下的模型簡化許多。 圖 2-1 為複數平面上靜止座標與同步旋轉座標之兩個座標系統,其中 (a,b,c)與(α,β)分別代表定子的靜止三軸座標系統以及靜止二軸座標系統,而 (d,q)代表轉子的同步旋轉座標系統。 a-axis b-axis c-axis d-axis q-axis r α-axis β-axis s f s f s f qs f ds f
a,b,c Motor Three Phase Coordinates α,β Stator Fixed Coordinates d,q Rotating Coordinates 圖 2-1 馬達於複數平面上的靜止與同步旋轉座標系統 彼此之間的轉換關係為 cs bs as s s f f f f f 2 1 2 1 0 6 1 6 1 3 2 (2-12)
8 s s cs bs as f f f f f 2 1 6 1 2 1 6 1 0 3 2 (2-13) s s r r r r qs ds f f f f cos sin sin cos (2-14) qs ds r r r r s s f f f f cos sin sin cos (2-15) 經轉換後,式(2-11)變成 qr dr qs ds r r sl r m sl m sl r r r sl m m m e m s s e s e m m e s s s qr dr qs ds i i i i P L R L P L L L P L R L P L P L L P L R L L P L L P L R V V V V (2-16) 定義滑差速度sl為 r e sl (2-17) 而力矩可表示為 ) ( 2 ) ( 2 ) ( 2 qr dr dr qr ds qr qs dr r m qr ds dr qs m e i i P i i L L P i i i i L P T (2-18) 其中磁通量λ 可表示為 qr r qs m qr dr r ds m dr i L i L i L i L (2-19)
9 我們可定義 r m r s L L L L L 2 (2-20) 將式(2-19)、(2-20)代入(2-16)和(2-17)可得 qr dr qs ds r r sl r r m sl r r r r m r m e r m s e e r m r m e s s qr dr qs ds i i P L R R L L P L R R L L P L L L L P L R L L L P L L L P L R V V V V 0 0 (2-21) 而感應馬達之機械動態方程式可表示為 m r r m m m m m L e B dt d J P B dt d J T T 2 (2-22)
2.3 間接向量控制
根據式(2-10),轉子電壓方程式在同步旋轉座標下可表示為
0 e r qr r dr dr i R dt d (2-23)
0 e r dr r qr qr i R dt d (2-24) ds m dr r dr Li L i (2-25) qs m qr r qr Li L i (2-26) 將式(2-25)、(2-26)代入式(2-23)和(2-24)中得 0 r ds sl qr r m dr r r dr R i L L L R dt d (2-27) 0 r qs sl dr r m qr r r qr i R L L L R dt d (2-28)10 轉子磁場導向向量控制主要的用意在使轉子磁通量 r 映射在 d 軸上的量為 一固定值,而在 q 軸上為零。 0 dt d qr qr (2-29) t cons r dr tan (2-30) 將式(2-29)、(2-30)代入(2-27)和(2-28) qs r r r m sl i L R L (2-31) ds m r r r r i L dt d R L (2-32) 將式(2-32)轉成頻率域(s-domain)並代入(2-31)得 s R L i L r r ds m r 1 (2-33) ds qs r r qs r r ds r r sl i i s i L R i s R L 1 1 (2-34) r r r R L 為轉子時間常數,而定子磁通量的關係可以表示為 ds s dr m ds L i Li (2-35) qs s qr m qs L i Li (2-36) 將式(2-35)、(2-36)代入(2-25)和(2-26)得 dr r m ds r m s ds L L i L L L 2 (2-37) qr r m qs r m s qs L L i L L L 2 (2-38)
11 力矩方程式可表示為
qs ds ds qs
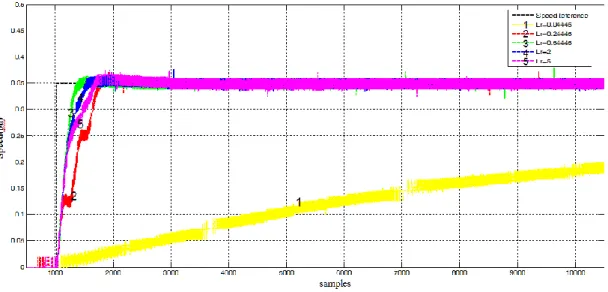
e i i P T 2 (2-39) 將式(2-37)和(2-38)代入(2-39)得 r qs r m e i L L P T 2 (2-40) 圖 2-2 為感應馬達控制架構[4],其和永磁馬達的差別在於提供給物件 PARK 和 I_PARK 的 Theta 由物件 CUR_MOD 產生,其中已將滑差計算在內。在本 控制架構中,電流迴路取樣頻率為 15 KHz,速度迴路為 7.5 KHz,位置迴路 則為 1 KHz。 圖 2-2 感應馬達整體控制架構2.4 轉子常數的自動調整
感應馬達響應的好壞和滑差有著密切的關係,而由式(2-34)得知,滑差深 受轉子時間常數的影響。轉子時間常數是轉子電感與轉子電阻的比值,但有 時購買馬達時,廠商不一定會提供這些數據,因此我們設計一個自動調整的12 方法,找出最接近實際轉子時間常數的值。 圖 2-3 為不同轉子時間常數下的響應,我們固定轉子電阻為 10 Ω,故改 變轉子電感的值等同於改變轉子時間常數。輸入速度命令為 525 rpm,可以 發現當轉子時間常數太大或太小時會導致滑差的計算錯誤,而使響應變差。 圖 2-4 為轉子電感和上升時間(rise time)的關係,轉子電感在 0.5~1 之間會使 上升時間最小,因此我們分成三個區域並以斜率來區分,第一區為轉子電感 在 0.5 以前和上升時間的斜率為負值,第二區是在 0.5~1 之間斜率趨近於零, 而第三區則是轉子電感在 1 以後和上升時間的斜率為正值。自動調整過程為 利用斜率判斷此時是落在哪個區域,在第一區就將轉子電感增加,第三區則 將轉子電感減少,若是落到第二區則自動調整停止,流程如下。 轉子電感自動估測程序: 1. 設定轉子電感的初始值並執行步階命令得到上升時間(rise time) 2. 需有兩點才能決定斜率,故將轉子電感增加 0.1,執行步階命令得 到新的上升時間。 3. 根據最新兩筆資料得到斜率並判斷在第幾區 4. 在第一區表示比實際值小,將轉子電感增加。第三區則表示比實 際值大,將轉子電感減少。若是落到第二區則代表很接近實際值, 自動調整停止。 5. 根據新的轉子電感值得到新的上升時間,並跳回第三步重複執行 圖 2-5 和 2-6 分別為轉子電感初始值比實際小和大時自動調整的情況, 由圖可知此自動調整方法無論一開始設定轉子電感的值過大或過小,都能順 利將之調整至大約 0.7 附近。
13
圖 2-3 不同轉子時間常數下的速度響應
14 圖 2-5 轉子電感初始值為 44.45mH 的自動調整過程 圖 2-6 轉子電感初始值為 3H 的自動調整過程
2.5 弱磁控制
馬達一般都會標示額定轉速,在額定轉速前響應較為線性,超過額定轉 速之後響應變差,甚至會有所侷限而無法繼續上升,主要是因為有反電動勢 的影響。圖 2-7 為馬達動態模型,由圖可知真正進入馬達的電壓是 vqs扣掉反 電動勢,當反電動勢飽和時,進入馬達的電壓變小,不足夠讓馬達的速度再 上升。Ls和 Lm為固定常數,反電動勢和mr成正比,根據式(2-33),λr又 1 2 3 4 5 6 7 8 9 10 0.1 0.2 0.3 0.4 0.5 0.6 0.7 X: 9.303 Y: 0.7443 Time(Sec) L r( H ) Lr( H ) Time(sec) 0 5 10 15 0 0.5 1 1.5 2 2.5 3 X: 14.56 Y: 0.6999 Time(Sec) L r( H ) Time(sec) L r( H )15 和 ids成正比,故想要使速度上升,ids需下降。圖 2-8 為我們弱磁控制的方法, 在額定轉速以前固定 ids為 iD,額定轉速之後 ids和m成反比下降。圖 2-9 是 在 110 V 下未加入弱磁控制前的響應,速度在超過額定轉速 750 rpm 一些後 即被限制,停止在 900 rpm。圖 2-10 為加入弱磁控制後的響應,突破原來限 制達到 4000 rpm。 圖 2-7 馬達動態模型 圖 2-8 弱磁控制中電流與速度關係 s R 1 m
L
eL
s L R L L R r r s s 1 r r m L L m ms B J 1 r m s L L ds V qs V + + - - + - L T e T m r ds i qs iD
i
b
d s
i
16 圖 2-9 未加入弱磁控制的速度響應 圖 2-10 加入弱磁控制後的速度響應 0 2000 4000 6000 8000 10000 0 0.5 1 1.5 2 2.5 SpeedFeedback SpeedReference
samples
V
eloc
ity(p
u, 1pu=
1500r
pm)
samples
V
eloc
ity(p
u, 1pu=
1500r
pm)
1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 0 0.5 1 1.5 2 2.5 SpeedFeedback SpeedReference17
第三章
第三章 精密運動伺服控制
本章將逐一介紹各種精密伺服控制器的理論推導和架構,設計出適當的補償 器並在馬達控制上呈現其效果。
3.1 零相位誤差追跡控制器 (zero phase error tracking controller,
ZPETC)
2 1 1 1 ) 1 ( ) ( ) ( ) ( ) ( u a u d p B z B z B z A z z Z ) ( ) ( ) ( ) ( 1 1 1 z A z B z B z z T a u d 圖 3-1 ZPETC 基本架構圖 圖 3-1 為 ZPETC 的架構圖[5-7],其基本的設計概念是將位置迴路中所有可 以對消的極、零點消去,而對於不可對消的零點則利用共軛零點來補償其相位, 使得系統在所有頻率中,實際位置輸出與理想位置輸出間沒有相位差。假設位置 迴路的轉移函數:
11 1 1 1 1 z A z B z B z z A z B z z T a u d d (3-1) 其中
n nz z z z A 1 11 12 2 ,並且
1 z A 為穩定多項式
m mz b z b z b b z B 1 0 1 1 2 2 ,b0 0, d z 為 d 階延遲 (d-step delay)
a q q a a a a z b b z b z b z B 1 0 1 1 2 2 ,boa 0,並且
1 z Ba 為可接受多項式 (Acceptable Polynomial),是由
1 z B 多項式中穩定且較少震盪的零點所組 成的多項式。 Zp(z -1) T(z -1) R(z -1) Y(z -1)18
u p p u u u u z b b z b z b z B 1 0 1 1 2 2 ,bou 0,並且
1 z Bu 為不可接受多項 式(Unacceptable Polynomial),是由
1 z B 多項式中不穩定且震盪較多的零 點所組成的多項式。 其中pqm,因此,所設計之前置控制器所具備的轉移函數為:
1
2 1 1 1 u a u d p B z B z B z A z z Z ,
0 1 u B (3-2) 可得全部系統的轉移函數
) ( 1 1 z R z Y :
2 2 1 2 1 1 1 1 1 1 1 ) ( u u u u u p B z B B z B z B z T z Z z R z Y (3-3) 對於所有的頻率而言,整體控制迴路系統的頻率響應無任何的相位落後的情況產 生,並且在零頻率的附近增益響應響應接近於一。然而,需要準確的受控體動態 響應模型(model),是 ZPETC 使用上的最大缺點,因為任何系統模型皆存在一 定的誤差,所以使用時需選取誤差最小的模型來進行設計。 下列針對 Z 軸進行設計,鑑別永磁馬達在位置閉迴路下的模型,利用 MATLAB 產生 0~22 Hz 以內的合成弦波作為位置命令,最後將位置命令與位 置回授資訊利用 MATLAB 的 ARMAX 指令獲得位置閉迴路 Model,如下4 3 2 1 1 1 1 1 1 5191 . 0 9659 . 1 263 . 3 8109 . 2 1 ) 6627 . 0 1 )( 9359 . 0 1 )( 1286 . 1 1 ( 11452 . 0 ) ( z z z z z z z z z Pn (3-4) 可以發現系統零點為0.9359、0.6627與1.1286,為非最小相位系統,則分子 可分成
19 1 1 1286 . 1 1 ) (z z Bu (3-5) ) 6627 . 0 1 )( 9359 . 0 1 ( 11452 . 0 ) (z1 z1 z1 Ba (3-6) 將式(3-5)、(3-6)帶入式(3-2)可得 ZPETC 為 2 1 1 4 3 2 1 1 ) 1286 . 1 1 )( 6627 . 0 1 )( 9359 . 0 1 ( 11452 . 0 ) 1286 . 1 1 )( 5191 . 0 9659 . 1 263 . 3 8109 . 2 1 ( ) ( z z z z z z z z z Zp (3-7) 圖 3-2 為 Z 軸位置閉迴路加入 ZPETC 前後的頻率響應,在尚未加入 ZPETC 之前,系統的頻寬約為 28 Hz,但是加入 ZPETC 之後,頻寬不但大幅上升至 186 Hz,且相位響應非常理想 (a) 原系統 (BW 28Hz) -50 -40 -30 -20 -10 0 M a g n itu d e ( d B ) System: sys Frequency (rad/sec): 181 Magnitude (dB): -3.06 100 101 102 103 104 -450 -360 -270 -180 -90 0 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec)
20 (b) 加入 ZPETC 後 (BW 186Hz) 圖 3-2 Z 軸位置閉迴路加入 ZPETC 前後之頻率響應的模擬結果
3.2 交叉耦合控制器 (cross-coupled controller CCC)
交叉耦合控制是由 Koren 所提出[8],主要目的並不是改善各軸的追蹤誤差, 而是協調各軸的位置誤差以消除兩軸以上的輪廓誤差。交叉耦合控制器並不直接 改變各軸的運動控制迴路,而是在軸與軸的控制迴路間加上補償器,藉由補償器 產生適當的回授信號送至各軸而使得各軸的動態響應能夠匹配。之後 Koren and Lo 又提出另一種新的交叉耦合控制架構,稱為可變增益交叉耦合控制器[9-10], 控制器架構如圖 3-3 所示。之所以稱為可變增益的原因為控制器會依照不同的軌 跡形式去調整輪廓誤差模組增益值(Cx,Cy)。 -50 -40 -30 -20 -10 0 M a g n itu d e ( d B ) System: sysFrequency (rad/sec): 1.17e+003 Magnitude (dB): -3.16 100 101 102 103 104 -1 -0.5 0 0.5 1 P h a s e ( d e g ) Bode Diagram Frequency (rad/sec)
21 圖 3-3 可變增益交叉耦合控制器結構圖
3.2.1 直線路徑 (Linear Contour)
由圖 3-4 的直線路徑幾何形狀可以知道其輪廓誤差 ε 為 : Exsin Eycos (3-8) 由於 V V V V x y ;cos sin (V: 進給速度),因此式(3-8)成為 y x x y x y y x E V V E V V V V E V E (3-9) 且由圖 3-3 的架構中可知 y y x xE C E C (3-10) 比較式(3-9)與式(3-10)可知可變增益交叉耦合控制器的輪廓誤差模組增益值 (Cx,Cy)分別為: V V Cx sin y V V Cy cos x (3-11) 由式(3-11)說明輪廓誤差模組增益會依直線路徑的角度不同而調整22 Es為同動誤差,在 A 點及 B 點的同動誤差同為零。故我們想補償同動誤差, 將 P 點補償至 B 點,可以等同於補償輪廓誤差,將 P 點補償至 A 點,也就是用 來改善輪廓誤差的交叉耦合控制器方法也可改善同動誤差。 圖 3-4 直線路徑之輪廓誤差
3.2.2 補償器設計
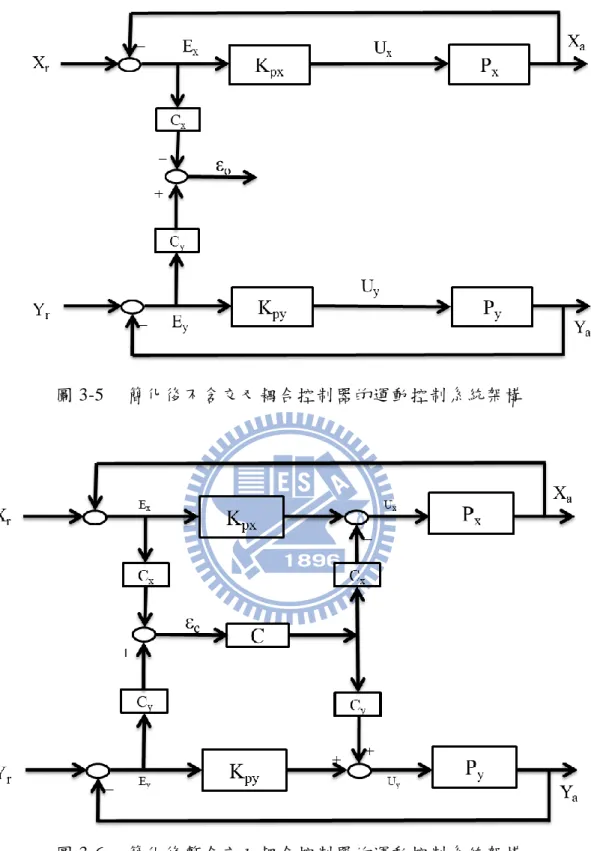
一般交叉耦合控制器的補償器 C 為一常數,因為無需設計只要自行調整得 到最佳效果即可。但根據參考文獻[11-15],可以依使用者的需求設計出較佳的補 償器。圖 3-5 中,我們經由推導可以得知輪廓誤差o與命令輸入 Xr、Yr之間的 關係為:
r r x px y y py x x px y py o Y X P K C P K C P K P K 1 1 1 1 1
(3-12) 同樣的在圖 3-6 中可以推導在耦合控制下之輪廓誤差c與命令輸入 Xr、Yr之間 的關係為:
r r x px y y py x y x px x x y py x px y py c Y X P K C P K C P CC P K P CC P K P K P K 1 1 1 1 1 1 1 2 2
(3-13) R:參考位置 P:實際位置 Ex、Ey:X、Y 軸位置誤差 Es:同動誤差 ε :輪廓誤差23
圖 3-5 簡化後不含交叉耦合控制器的運動控制系統架構
24 比較式(3-12)和式(3-13)可得
o x px y py y y x px x x y py c P K P K P CC P K P CC P K
1 1 1 1 1 1 2 2 (3-14) 我們在此定義兩個新的分式函數,α、β 分別為:
1KpyPy
1KpxPx
:
KpyPy CxPx KpxPx CyPy
C 1 2 1 2 : (3-15) o 與c之關係式可以表示成 o c 1 1 (3-16) 由式(3-16)中可知加入交叉耦合控制器後對輪廓誤差的影響,同時我們也可以設 計補償器 C,使得輪廓誤差的響應能合乎我們的要求。令 o c T 其中 T 為輪廓誤差間的轉移函數,且 1 1 T 而
CK P K P K P C P K P C P K C x px y py y y x px x x y py 1 1 1 1 2 2
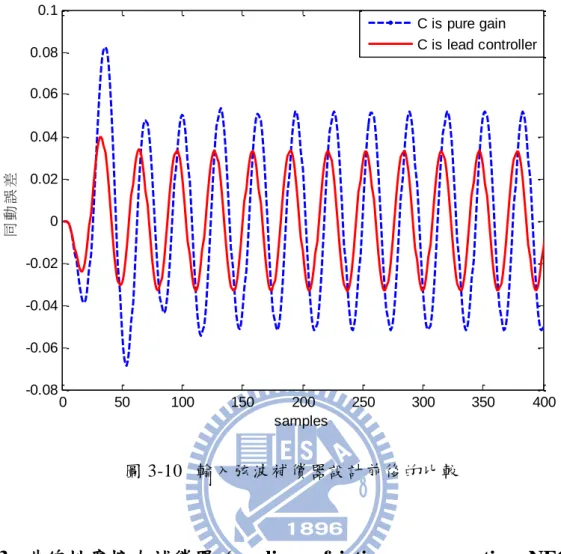
(3-17) 在式(3-17)中,我們將 分解成兩項: C : 所需設計的補償器 K : 與補償器無關的分式函數25 因此我們可以先得知分式函數 K 的頻率響應,然後適當的加入極零點以設計補 償器 C 使得轉移函數 T 具有良好的頻率響應與穩定性。在此我們使用參考文獻[12] 中的系統來模擬 8 7 6 5 4 3 2 1 6 5 4 3 2 1 1 0456 . 0 11 . 0 207 . 0 1701 . 0 3099 . 0 322 . 0 5804 . 0 5957 . 1 1 0006 . 0 0003 . 0 0022 . 0 0018 . 0 005 . 0 0026 . 0 ) ( z z z z z z z z z z z z z z z Px 8 7 6 5 4 3 2 1 6 5 4 3 2 1 1 2001 . 0 1997 . 0 102 . 0 1933 . 0 3141 . 0 1946 . 0 3473 . 0 5578 . 1 1 0003 . 0 0036 . 0 0003 . 0 0015 . 0 0031 . 0 0023 . 0 ) ( z z z z z z z z z z z z z z z Py Kpx=0.28 Kpy=0.2544 Cx=Cy=0.7071 分式函數 K 的頻率響應如圖 3-7 所示,若補償器 C 為常數 2,CK 的響應會如圖 3-8 所示,頻寬變大但相位邊界(phase margin)變小。若我們想要更快的響應並且 有更高的穩定度,可以使用相位領先控制器(lead controller)[16]。首先觀察圖 3-8, 相位邊界為 o 20 ,我們希望能提升到接近45 ,欲提升角度為 o o m 45203055 (3-18) 而 0994 . 0 sin 1 sin 1 m m (3-19)
轉移函數的大小會被提升,計算出新的增益交越頻率(gain crossover frequency)
s rad db g 200 / 10 1 log 20 (3-20) 最後可以算出 T 為 0157 . 0 1 g T (3-21)
26 所以相位領先控制器為 s s Ts Ts C 00156 . 0 1 0157 . 0 1 2 1 1 2 (3-22) 轉回離散域(z-domain) 1 1 1 5146 . 0 1 76 . 14 73 . 15 ) ( z z z C (3-23) C 為常數和相位領先控制器的頻率響應比較如圖 3-9 所示,設計後的補償器使頻 寬和相位邊界都變大,響應更佳。輸入弦波比較同動誤差,如圖 3-10 所示,補 償器 C 為相位領先控制器時效果較好。欲設計較佳的補償器需知道系統模型, 但是使用系統鑑別時往往存在著模型誤差(modeling error),並且容易使機台損壞, 故在實作上還是使用常數設計。 圖 3-7 分式函數 K 的頻率響應 -80 -60 -40 -20 0 20 M a g n itu d e ( d B ) Bode Diagram Frequency (rad/sec) 100 101 102 103 104 -900 -720 -540 -360 -180 0 System: sys Phase Margin (deg): 45.5 Delay Margin (samples): 10.8 At frequency (rad/sec): 73.8 Closed Loop Stable? Yes
P h a s e ( d e g )
27 圖 3-8 轉移函數 CK(C=2)頻率響應 圖 3-9 補償器設計前後的頻率響應比較 -80 -60 -40 -20 0 20 M a g n itu d e ( d B ) System: sys Frequency (rad/sec): 203 Magnitude (dB): -10.2 Bode Diagram Frequency (rad/sec) 100 101 102 103 104 -900 -720 -540 -360 -180 0 P h a s e ( d e g ) System: sys
Phase Margin (deg): 20 Delay Margin (samples): 3.14 At frequency (rad/sec): 111 Closed Loop Stable? Yes
-80 -60 -40 -20 0 20 M a g n itu d e ( d B ) Bode Diagram Frequency (rad/sec) 100 101 102 103 104 -900 -720 -540 -360 -180 0 System: sys Phase Margin (deg): 20 Delay Margin (samples): 3.14 At frequency (rad/sec): 111 Closed Loop Stable? Yes
System: sys Phase Margin (deg): 41 Delay Margin (samples): 3.55 At frequency (rad/sec): 202 Closed Loop Stable? Yes
P h a s e ( d e g ) C is pure gain C is lead controller
28
圖 3-10 輸入弦波補償器設計前後的比較
3.3 非線性摩擦力補償器 (nonlinear friction compensation, NFC)
在此節中將說明摩擦力對於系統的影響,與其造成的原因為何,並探討 如何解決之。
3.3.1 摩擦力介紹與對系統產生的影響
摩擦力以某種程度的影響力存在於所有的機械設備,在許多運動控制應 用中,摩擦力一直是限制系統性能的主要因素之一,但是因為非線性是它的 自然特性,所以摩擦力通常會被忽略或是使用一般控制器不當的補償它。系 統的摩擦力可能不是對稱的,也就是在正速度下和負速度下,其動摩擦力是 不一樣的。關於摩擦力方面的討論與文獻過往以有許多的探討[17-20],例如 摩擦力的模型、識別摩擦力模型參數與補償的方法,均已非常的豐富。但基 0 50 100 150 200 250 300 350 400 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 samples 同動誤差 C is pure gain C is lead controller29 本上都有共通的問題,就是它們都是非因果的(non causal),也就是說,在速 度為零時,有一明顯的中斷存在,其斜率接近於無窮大。這使得不當的補償, 也許會導致系統的不穩定,因為回授的速度估測,並無法得知系統真正「零 速度」下的反應。
3.3.2 非線性摩擦力補償器設計
在 model-based 的非線性補償方式中,大多是發展出一個非線性的模型, 或是套用已發表於文獻中的模型,再識別模型中各個參數,以符合這些模型 的需求。但往往得到的真實機台非線性模型並非和特定的非線性模型類似, 或是找不到適當的模型參數以符合真實機台的非線性曲線。尤其是當模型的 參數高達 5 至 6 個時,此種方式難以使用。 一般的馬達速度控制方塊如圖 3-11 所示,我們將所有扭矩等效為電流量, 以配合實現上的方便,由圖可以得知,實際送給馬達的轉矩是扣除掉摩擦力 和外部擾動量,使得由控制器產生的扭矩命令與實際馬達產生的扭矩不同, 以至於系統無法達到精密運動的需求。圖 3-11 中,電流命令iq,ref 是速度誤差 經過 PI 控制器所產生,但實際送到馬達的等效電流為iq,act e disturbanc friction ref q act q i i i i , , (3-24) 其中id i s t u r b a n ce為外部擾動量,ifriction為靜摩擦力、動摩擦力及黏滯係數的總和 量。在無切削力的情況下,我們若忽略掉idisturbance,因此機械方程式可被改寫 為: ) ( ,,act t qref friction q t m K i K i i dt d J (3-25) 所以在等速度命令下,由式(3-25)可知,iq,r ef就等於if r i ct i o n。所以我們採用的 方式為送入不同速度命令r ef,在其速度到達穩態時,量取平均的電流命令, 這樣我們就可以得到速度命令對ifr ictio n的曲線,再利用如圖 3-12 所示的前饋
30 式非線性補償器補償非線性摩擦力[6],其中K 為百分比參數。 n PI ref iq,ref fdb noise d KJst act q i, 圖 3-11 無摩擦力補償之一般馬達控制之速度迴路 PI ref iq,ref fdb noise d KJst n K NFC NFC i 圖 3-12 前饋式非線性摩擦力補償器架構 在實際應用上,由於速度命令較小時,其非線性的成份較大,故在下達 速度命令時,命令間隔取比較小的值,以此增加資料量,而-1~1 rpm 之間不 作補償的動作。此外因為 Z 軸速度不會超過±450 rpm,故只將摩擦力的曲線 分成四個區域 第一區:1~5rpm 第二區:5~450rpm 第三區:1~5rpm 第四區:5~450rpm
31
每一個區域均使用最小平方法曲線揉合(least-square curve fitting)的方式得到 其模型,在第一區和第三區是使用一階的模型,而第二區與第四區則是使用 二階的模型。圖 3-13 為對 Z 軸建立的非線性摩擦力曲線,模型如下 rpm rpm rpm rpm izNFC 450 5 5 1 450 5 5 1 2 . 2859 6309 . 0 00362 . 0 ) 4 ( 95 . 2926 117 . 29 ) 3 ( 59 . 3651 80188 . 0 0000056923 . 0 ) 2 ( 3 . 3870 94 ) 1 ( 2 2 , 圖 3-13 非線性摩擦力曲線 -500 -400 -300 -200 -100 0 100 200 300 400 500 -4000 -3000 -2000 -1000 0 1000 2000 3000 4000 5000 Speed(rpm) Friction Model C u rr e n t C o m m a n d Real Data Curve Fitting
32
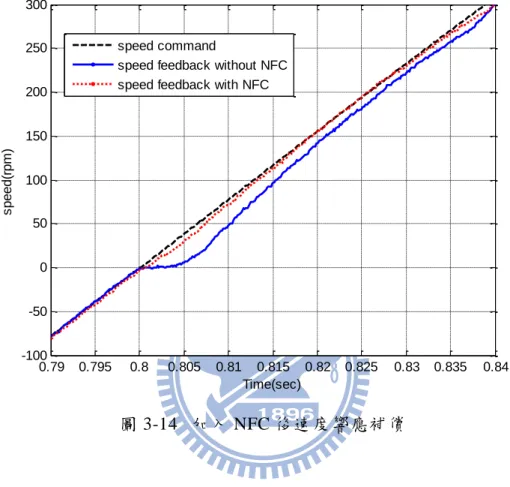
實際在馬達上做實驗,輸入一累加的速度命令,在速度通過零時代表馬達由靜止 正要起動。如圖 3-14 所示,沒加入補償器前因為最大靜摩擦力的影響,使馬達 會停止一小段時間,但加入 NFC 後停止的時間變短,追跡誤差變小。
圖 3-14 加入 NFC 後速度響應補償
3.4 擾動觀測器 (disturbance observer, DOB)
擾動觀測器(disturbance observer, DOB)[21]被廣泛地用於降低外界擾動 對控制系統的影響,利用其觀測值進一步補償則成為擾動補償器,它不僅可 以將外界對系統擾動量觀測出來,同時也對系統本身的 modeling error 行為 偏差進行糾正動作,讓系統行為合乎觀測器的預期。圖 3-15 為 DOB 的控制 架構,從補償器的角度來說,將擾動訊號在輸入訊號的對等量估測出來,反 而有助於補償器的實現,因為它只要將估測到的擾動量直接從輸入訊號扣除, 就達到對抗擾動的目的,而不需去探究到底真正擾動源發生的位置。 0.79 0.795 0.8 0.805 0.81 0.815 0.82 0.825 0.83 0.835 0.84 -100 -50 0 50 100 150 200 250 300 Time(sec) s p e e d (r p m ) speed command
speed feedback without NFC speed feedback with NFC
33 圖 3-14 顯示了 DOB 的控制系統架構,其中 ref :速度命令 fdb :馬達轉速 ref q i , :電流命令 d :低頻的外界擾動 n :高頻的量測雜訊 d~ :估測到的擾動量 PI :速度迴路的 PI 控制器 J :馬達與負載等效至馬達端之總轉動慣量 B :馬達與負載等效至馬達端之總黏滯係數 t K :轉矩常數 PI ref fdb d d~ ref q i , n B Js Kt DOB 圖 3-15 DOB 的控制架構 以下進行擾動觀測器設計,馬達機械方程式為 ) ( t e L L e m m i i K T T B dt d J (3-26)
34 其中m、i 及e i 分別為圖 3-15 中的L f d b、iq,ref 及d,假設J J/Kt與B B/Kt, 則(3-26)式可簡化為 L e m m i i B dt d J (3-27)
再利用前向矩形法(forward-rectangular rule / Euler’s rule)對(3-27)式離散化
(k 1) (k)
B (k) i (k) i (k) T J L e m m m s (3-28) 令m(k)與iL(k)為狀態,則系統狀態方程式為 ) ( ) ( ) ( ) ( ) ( ) ( ) 1 ( ) 1 ( k i k C k y k Bi k i k A k i k L m e L m L m (3-29) 其中 1 0 1 J T J T B A s s , 0 J T B s ,C
1 0 其擾動觀測器為 )) ( ˆ ( ) ( ) ( ˆ ) ( ˆ ) 1 ( ˆ ) 1 ( ˆ k y L k Bi k i k A k i k m e L m L m (3-30) 其中 2 1 l l L ,而觀測器的狀態收斂至實際狀態的速度是由(ALC)的特徵值 決定,其特徵值可由觀測器增益l 與1 l 決定 2 ) )( ( ) ( ) 1 ( 1 2 1 2 12 1 11 11 1 2 2 12 1 11 z z l a l a z a l z z l a l a z LC A zI (3-31)35 其中 J T B a111 s 、 J T a s 12 、1與2為我們預期觀測器的極點位置,比較係 數可得 12 1 11 2 1 2 11 2 1 1 1 a l a l a l (3-32) 以下為 DOB 的實驗結果,我們為了模擬外界擾動對控制系統的影響,所以 直接從電流命令加入干擾訊號d1000sin2t9000。圖 3-16 分別為速度命令 與電流干擾訊號 d。如圖 3-17 所示,為馬達空載及無干擾訊號時的速度響應, 平均誤差為 2.34 rpm。將干擾訊號加入後,如圖 3-18 所示,在尚未使用 DOB 以前,速度響應受干擾訊號影響,性能降低,平均誤差變成 2.70 rpm。使用 DOB 之後,擾動量被估測出來,如圖 3-19 所示,並加以補償發揮抑制干擾 到效果,平均誤差降成 1.55 rpm,如圖 3-20 所示。此外,觀察圖 3-19 可以 發現估測出的擾動量會有週期性的震盪,原因是馬達三相電流是透過霍爾電 流感測器偵測,但霍爾電流感測器對於電源品質有一定的要求,在加上感測 信號回授至 DSP 前,又要經過振幅縮放與凖位拉升,這些電路的電阻一定存 在著誤差值。而馬達三相電流回授發生了平均值非零或振幅不同時,便會產 生 torque ripple,詳細的驗證可以參考文獻[22]。
36 (a) 速度命令 (b) 電流干擾訊號 圖 3-16 DOB 實驗的速度命令與干擾訊號 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 150 200 250 300 350 400 Time(sec) s p e e d (r p m ) 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 7500 8000 8500 9000 9500 10000 10500 Time(sec)
37 圖 3-17 馬達空載及無干擾訊號時的速度響應 圖 3-18 加入干擾訊號後的速度響應 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 150 200 250 300 350 400 Time(sec) s p e e d (r p m ) speed command
speed feedback without noise
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 150 200 250 300 350 400 Time(sec) s p e e d (r p m ) speed command
38 圖 3-19 估測干擾訊號 圖 3-20 加入 DOB 補償後的速度響應 0.5 1 1.5 2 7000 7500 8000 8500 9000 9500 10000 10500 11000 Time(sec) input noise
estimated noise by DOB
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 150 200 250 300 350 400 Time(sec) s p e e d (r p m ) speed command
39 在此節介紹了各種精密運動伺服控制的方法,零相位誤差追蹤控制器 (ZPETC)可以使整體頻率響應無任何相位落後。交叉耦合控制器(CCC)可以協調 各軸使同動誤差變小,其中補償器可以經由設計達到更好的補償效果,但缺點是 需知道系統模型。非線性摩擦力補償器(NFC)可以減少因為最大靜摩擦力而導致 在零速度時會有延遲的現象。而擾動觀測器(DOB)可以不必考慮干擾的來源,將 相對應的擾動量估測出來並補償抑制擾動。
40
第四章
第四章 實驗結果
本章首先介紹攻牙的流程,接著用感應馬達和永磁馬達執行攻牙命令,根據 目前最大誤差發生的原因將第三章的精密運動控制策略加入,使誤差逐漸降低。4.1 攻牙流程
圖 4-1 為攻牙流程,在 Operation 1 時,主軸不動,平台移動使待切削物品移 動至 point p。在 Operation 2 時,主軸依然不動,Z 軸往下移動使刀具接近待切 削物品。在 Operation 3 時,主軸與 Z 軸維持一定位置比例移動,至孔底 point Z 時兩軸都停止。在 Operation 4 時主軸與 Z 軸也是維持一定位置比例移動,最後 刀具離開切削物品。 圖 4-1 攻牙流程 在剛性攻牙過程中,主軸與 Z 軸必頇保持一定的位置比例關係,也就是主軸每 轉一圈,Z 軸要移動一個節距,兩軸關係為一直線,若是有些許誤差,攻出來的 螺紋就會是非等比例,且退刀時刀具容易崩牙。41
4.2 模擬結果
我們利用 Matlab 模擬控制器的補償效果,送入兩軸的命令為 100sin10t,其 最大同動誤差為 6.72。導致同動誤差的主要原因為主軸和 Z 軸響應不同,為了 改善因兩軸特性不同而產生的誤差,有三種方法可以解決。4.2.1 Z 軸追隨主軸
圖 4-2 為 Z 軸追隨主軸的系統架構,由於主軸與 Z 軸彼此的位移關係為一直 線,因此可以將主軸感應馬達的實際輸出做為 Z 軸的輸入命令,利用響應較快 的 Z 軸去追隨主軸的變化,但是永磁馬達本身就會存在著伺服落後的問題,故 需加入零相位誤差追蹤控制器,其最大同動誤差改善為 2.34。 圖 4-2 Z 軸追隨主軸的系統架構4.2.2 交叉耦合控制器單軸補償
將兩軸各自的追跡誤差(tracking error)納入考量,根據兩軸位置位移的直線 角度以及適當的補償器參數計算出補償值,並補償至響應較快的一軸,使響應較 快的一軸追隨響應較慢的,希望將圖 3-4 中的 P 點移動至 A 點,單軸補償的交 叉耦合器簡化架構如圖 4-3 所示,其最大同動誤差改善為 2.39。但若是想將 P 點 補償至 B 點,則頇將補償器增益值做一調整,本文模擬條件θ為 45o,故將增益 值放大兩倍,最大同動誤差改善為 1.34。42 圖 4-3 交叉耦合器之單軸補償簡化架構圖
4.2.3 交叉耦合控制器雙軸補償
和單軸補償一樣,將兩軸的追跡誤差納入考量,使用相同的補償參數。不同 的是補償值是補償至雙軸,其架構如圖 3-3 所示。同單軸補償之模擬條件,最大 同動誤差改善為 1.31 在此我們做個整理,三種方法的最大同動誤差如表 4-1 所示。雙軸獨立運作 沒有加入控制器之前最大同動誤差為 6.72,使用單軸補償至 A 點可以令較快的 一軸去追隨較慢的一軸,最大同動誤差減小為 2.39,而使用單軸補償至 B 點可 以減小至 1.34,但相對補償量會變大,會遇到飽和的問題。而雙軸補償可以保持 和單軸補償至 A 點之架構相同的補償器增益,但補償效果較好,最大同動誤差 為 1.31。 表 4-1 改善雙軸特性不同之方法比較 系統架構 無交叉耦合 控制器 Z 軸追隨 主軸 單軸補償 至 A 點 單軸補償 至 B 點 雙軸補償 最大同動誤差 6.72 2.34 2.39 1.34 1.3143
4.3 實驗結果
在此我們假設節距(pitch)為 1 mm,Z 軸的 BLU 為 5/131072 mm,主軸則是 以 1500 rpm 的速度進行攻牙,輸入主軸位置命令如圖 4-4 所示,並和 Z 軸命令 的比值關係為 1.25,而實驗平台如圖 4-5 所示。由於位置命令和響應很接近不易 觀察,故之後的實驗圖將直接以同動誤差的形式呈現,並且為了清楚觀察孔底時 的響應,我們將 Operation 3 和 Operation 4 分開為兩張圖。 圖 4-4 主軸攻牙命令44
圖 4-5 實驗平台
4.3.1 雙軸獨立控制
圖 4-6 為雙軸獨立運作時的同動誤差,最大達到將近 132.1 um,可以發現同 動誤差在馬達加減速時逐漸累積後達到最大。圖 4-7 分別為 Z 軸(永磁馬達)和主 軸(感應馬達)的速度步階響應,可以發現 Z 軸的 rise time 約為 15 ms,主軸的 rise time 約為 96 ms,兩軸響應差異甚大。在加速過程中,感應馬達由於需要用滑差 來產生磁場,因此響應比永磁馬達要慢許多,此外在超過額定轉速後由於反電動 勢趨近飽和的影響,使得響應又變得更為緩慢。而在攻牙過程中,大部分都為加 減速狀態,主軸一直無法追上 Z 軸,導致同動誤差增大。
45 (a) Operation 3 的同動誤差 (b) Operation 4 的同動誤差 圖 4-6 雙軸獨立運作時的同動誤差 0 0.2 0.4 0.6 0.8 1 1.2 0 20 40 60 80 100 120 140 X: 0.695Y: 132.1 Time(sec) 同動誤差 (u m ) PI Controller 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2 2.1 2.2 0 20 40 60 80 100 120 140 Time(sec) 同動誤差 (u m ) X: 1.887 Y: 130.9 PI Controller
46 (a) Z 軸速度步階響應 (b) 主軸速度步階響應 圖 4-7 主軸與 Z 軸速度 1000rpm 步階響應 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 -200 0 200 400 600 800 1000 1200 Time(sec) V e lo c it y (r p m ) X: 0.01493 Y: 956 Speed Command Speed Feedback 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 200 400 600 800 1000 1200 X: 0.09627 Y: 958.4 Time(sec) V e lo c it y (r p m ) Speed Command Speed Feedback
47