國
立
交
通
大
學
電信工程學系
碩
士
論
文
24-GHz 連續調頻單脈衝技術之
雷達前端電路設計與整合
Front-End Circuit Design and Integration of 24-GHz
FMCW Monopulse Radar
研 究 生:許少華
指導教授:鍾世忠 教授
24-GHz 連續調頻單脈衝技術之
雷達前端電路設計與整合
Front-End Circuit Design and Integration of 24-GHz
FMCW Monopulse Radar
研 究 生:許少華 Student:Shau-Hua Shu
指導教授:鍾世忠 Advisor:Shyh-Jong Chung
國 立 交 通 大 學
電信工程研究系
碩 士 論 文
A Thesis
Submitted to Institute of Communication
College of Electrical Engineering and Computer Science
National Chiao Tung University
in partial Fulfillment of the Requirements
for the Degree of Master of Science
In communication Engineering
July 2009
Hsinchu, Taiwan, Republic of China
24-GHz 連續調頻單脈衝技術之雷達
前端電路設計與整合
研究生:許少華 指導教授:鍾世忠
國立交通大學 電信工程研究所
摘要
本論文中設計一個 24 GHz 雷達射頻模組。此射頻模組包含 6GHz 電壓控制震 盪器、12GHz 功率放大器、倍頻器、24GHz 帶通濾波器、枝幹耦合器、次階混頻 器與 24GHz 低雜訊放大器。同時,利用金屬槽孔耦合技術,使得天線在不增加額 外面積的情況下,僅付出插入損失 0.8dB。此雷達除了利用連續調頻的技術得知 物體的相對距離,並加入單脈衝的技術來判斷物體的角度。 最後為了驗證此連續調頻單脈衝射頻模組實際上運用的效果,搭配天線系統 與數位訊號處理模組,射頻模組與天線系統總體積為 9.4 × 9.4 × 1.7cm3 ,並從 已知場型來校正 Σ 與 Δ 接收路徑的不平衡。最後實際測量金屬圓柱與小型轎車 等目標物在不同距離與不同角度之Σ 與 Δ 的比值,以及 Σ 與 Δ 混頻頻率。從量 測結果得出此雷達的偵測能力可以達到 30 公尺內正負 25 度的範圍。Front-End Circuit Design and Integration of 24-GHz
FMCW Monopulse Radar
Student: Shau- Hua Shu Adivisor: Dr. Shyh-Jong Chung
Institute of Communication Engineering
National Chia Tung University
Abstract
A 24 GHz RF-module has been developed in this thesis. This RF-module consists of 6 GHz voltage control oscillator (VCO), frequency doubler, 12 GHz power amplifier, 24 GHz band-pass filter, 24 GHz branch-line, sub-harmonic mixer and 24 GHz low noise amplifier (LNA). Moreover, we make use of cavity couplers so that Tx as well as Rx antennas do not increase extra area, and the insertion loss is only 0.8dB as a cost. This radar not only use FMCW technique to obtain the object’s distance but also add Monopulse to determine the object’s direction.
In order to verify this FMCW Monopulse RF module, we combine it with antenna system and DSP-module as a radar system, and the RF transceiver’s volume is 9.4 × 9.4 × 1.7 cm3. After making an adjustment to cancel the Σ and Δ ports imbalance, we measure the Σ to Δ ratio of a metal cylinder and a car at different angles and distances, and also measure the mixed frequency of Σ as well as Δ signals. Finally, this radar’s detection ability can be achieved to 30 meters within ±25°.
誌謝
在研究所這兩年中,首先要感謝我的指導教授鍾世忠老師,經由老師的辛勤 指導與諄諄教誨,讓我學習到不只是微波領域的知識,更學習到做事的態度以及 獨自解決問題的能力。並且提供了那麼好的學習環境。特別感謝博士班小阿信、 何博、達叔、文龍與夥伴浩宇在實驗量測給予我的幫助與建議。 同時也由衷的感謝實驗室的大家,天線組的冷肥、子嫻、財溢、逼逼還有已 經畢業的阿雷、警棍、馬爺、科科與阿本。讓我在碩班兩年中留下美好的回憶。 最後我要感謝我的家人,在求學路上一直支持鼓勵著我。目錄
中文摘要……… i 英文摘要……… ii 誌謝……… iii 目錄……… iv 圖目錄……… v 表目錄……… vii 第一章 雷達原理及單脈衝技術探討 ……… 1 1.1 背景及動機 ……… 1 1.2 雷達原理 ……… 1 1.3 單脈衝技術探討 ……… 3 第二章 24GHz 連續調頻單脈衝技術之雷達系統……… 5 2.1 雷達系統架構 ……… 5 2.2 Σ與Δ設計 ……… 6 2.3 24GHz 微帶線垂直傳輸之設計……… 8 2.4 6GHz 壓控震盪器 ……… 13 2.5 6GHz 至 12GHz 倍頻器 ……… 17 2.6 12GHz 訊號放大器……… 20 2.7 12GHz 至 24GHz 主動倍頻器 ……… 23 2.8 24GHz 低雜訊放大器 ……… 25 2.9 次階混頻器 ……… 28 2.10 24GHz 帶通濾波器 ……… 30 2.11 接收端Σ與Δ兩路不平衡討論 ……… 32 第三章 雷達系統整合量測與分析……… 34 3.1 雷達量測與討論 ……… 34 3.2 30 公尺判斷車道之雷達應用……… 39 第四章 結論……… 41 參考文獻 ……… 42圖目錄
圖 1.1 雷達偵測原理示意圖 ……… 2 圖 1.2 防撞雷達功能示意圖 ……… 3 圖 1.3 Σ 與 Δ 天線場型示意圖……… 3 圖 1.4 Σ 與 Δ 比值示意圖……… 4 圖 2.1 雷達系統架構圖 ……… 5 圖 2.2 rat-race 電路圖……… 6 圖 2.3 枝幹耦合器+90 度傳輸線電路圖……… 7 圖 2.4 枝幹耦合器 S 參數量測圖 ……… 7 圖 2.5 枝幹耦合器 S21 與 S31 相位圖 ……… 7 圖 2.6 金屬槽孔耦合示意圖 ……… 8 圖 2.7 垂直傳輸之金屬槽孔耦合實體圖 ……… 9 圖 2.8 槽孔耦合_HFSS 模擬結果 S11、S21 與量測結果 S21 ……… 10 圖 2.9 板子對位偏移從 0.3~1mm 的模擬結果 ……… 10 圖 2.10 lt從 0.5~2.5mm 的模擬結果……… 11 圖 2.11 ls從 4.3~5.9mm 的模擬結果……… 11 圖 2.12 ws從 0.4~1.3mm 的模擬結果 ……… 12 圖 2.13 tc從 1~2.7mm 的模擬結果……… 12 圖 2.14 壓控震盪器電路圖……… 13 圖 2.15 壓控震盪器實體電路圖……… 13 圖 2.16 輸入阻抗之實部與虛部模擬圖……… 14 圖 2.17 相位雜訊量測圖……… 15 圖 2.18 輸出頻率與電壓關係圖……… 15 圖 2.19 輸出訊號一階與二階諧波功率圖……… 16 圖 2.20 倍頻器之模型意示圖……… 17 圖 2.21 6GHz 至 12GHz 倍頻器實體圖 ……… 18 圖 2.22 6GHz 至 12GHz 倍頻器輸出功率量測圖 ……… 18 圖 2.23 轉換損耗圖……… 19 圖 2.24 12GHz 放大器電路示意圖……… 20 圖 2.25 12GHz 放大器電路實體圖……… 21 圖 2.26 12GHz 放大器量測結果……… 21圖 2.27 12GHz 輸入功率為-10dBm ~ 10dBm 時輸出及諧波功率 ………… 22 圖 2.28 12 GHz 至 24 GHz 倍頻器實體電路照片 ……… 23 圖 2.29 12 GHz 至 24 GHz 倍頻器輸出功率量測結果 ……… 23 圖 2.30 12 GHz 至 24 GHz 轉換損耗結果圖 ……… 24 圖 2.31 兩級放大器可用功率和實際功率之示意圖……… 25 圖 2.32 兩級放大器雜訊模型……… 25 圖 2.33 兩級放大器電路實體圖……… 26 圖 2.34 兩級放大器電路模擬圖……… 26 圖 2.35 兩級放大器電路實際量測圖……… 27 圖 2.36 兩級放大器電路實際量測雜訊指數圖……… 27 圖 2.37 次階混頻器架構圖……… 28 圖 2.38 混頻器模擬的轉換損耗……… 29 圖 2.39 次階混頻器量測輸出入功率圖……… 29
圖 2.40 24 GHz Band pass Filter 實體電路照片圖……… 30
圖 2.41 24 GHz Band pass Filter 量測結果-1……… 30
圖 2.42 24 GHz Band pass Filter 量測結果-2……… 31
圖 2.43 24 GHz 低雜訊放大器結合混頻器實體圖 ……… 32 圖 2.44 4 組 24GHz 低雜訊放大結合混頻器的轉換損失量測圖……… 32 圖 2.45 雷達校正示意圖 ……… 33 圖 3.1 雷達前端模組照片……… 34 圖 3.2 數位訊號處理模組照片……… 35 圖 3.3 雷達量測環境與架設照片……… 35 圖 3.4 圓桶距雷達 15 公尺之Σ與Δ相位關係圖 ……… 36 圖 3.5 不同距離下-20~20°之Σ與Δ訊號比值圖(圓桶) ……… 37 圖 3.6 不同距離下-20~20°之Σ與Δ訊號比值圖(小型轎車) ……… 37 圖 3.7 背景雜訊示意圖……… 38 圖 3.8 示意圖……… 38 圖 3.9 30 公尺判斷車道之雷達應用示意圖 ……… 39 圖 3.10 偵測角度劃分與緩衝區域示意圖 ……… 40
表目錄
表 2.1 金屬槽孔耦合圖形參數……… 9 表 2.2 輸出功率、Phase noise 量測表格,輸出功率為 12dBm ……… 14
第一章 雷達原理及單脈衝技術讨論
1.1 背景及動機 隨著世界各國機動車輛的快速成長,已使得道路交通狀況變得十分擁擠、 混亂與複雜。道路建設已完全無法負荷汽機車成長的速度,汽機車充斥街道的情 形顯示出交通安全與運輸效率上的各項問題,各種複雜的交通環境皆亦造成交通 事故的發生。 近年來由於在電子、通訊等技術之高度發展及應用,已經促使人們開始懂 得利用這些技術加強汽車安全系統[1,2,3],監控駕駛人的精神狀態、加強視野、 防止碰撞,增進交通安全,因此相關先進之車用電子產品也逐漸蓬勃發展。汽車 防撞雷達的目的在於輔助人類感測能力的不足,主要是利用先進的通訊、控制與 資訊科技,偵測車輛週遭的動態狀況,如其他車輛、行人、或路上障礙物的相對 位置、速度與加速度等訊息,並適時通知駕駛人採取必要措施(如加速、減速或 保持車道等),以防止發生撞擊,增進車輛駕駛的安全性與舒適度。 根據研究,駕駛人如能多 0.5 秒之反應時間,則車輛追撞之機率可減少 60%;而如能再多 0.5 秒,則追撞機率可減少剩下 10% 。汽車防撞系統的作用即 在利用先進的電子設備,爭取駕駛人的反應時間。根據美國聯絡車隊(US fleets of tractor-trailers)的四年資料,Eaton-Vorad 的防撞警告系統降低了總計可 防止事故平均值的 50% (國家高速公路交通安全管理局(National Highway Traffic Safety Administration, NHTSA)資料),甚至可達 70%(Eaton-Vorad 資料)。 1.2 雷達原理 雷達是現今用來偵測物體最普遍的方法,舉個生活中比較容易讓大家了解雷 達原理的例子,當在夜晚停電時,大家常用的手電筒在黑暗的夜裡照射目標物 時,手電筒之光可將物體照亮,有一部份的光線反射到你的眼中,讓你可以感受 到有物體的存在,當電筒離開目標物,因為沒有反射光線,你就將看不見物體。 這就跟雷達的原理是相同,因為光線的行為跟電磁波的行為是相同的,我們雷達 藉著傳送端產生出高功率電磁波,此電磁波經由天線輻射出去形成所要的雷達 波。當發射出去的雷達波在空間中掃瞄,碰到目標後部分反射之電磁波經由雷達的接收天線回到接收端,稱之為回波;回波再經過濾波、放大等程序,與發射波 相對應比較,據以偵測目標是否存在,進而決定其距離、方向、高度、速度和其 他資訊,並藉雷達顯示器加以顯示出來,此即為雷達之基本原理[4]。 圖 1.1 雷達偵測原理示意圖 利用電磁波碰到物體表面會反射的特性,我們可以得到欲偵測物體的資訊: 1、距離:脈衝波跟 FMCW 雷達的計算方式不同。以脈衝波雷達而言,是測 量脈衝波發射與接收到回波的時間差;至於 FMCW 雷達[5]則是用固定速 率改變發射波頻率,再比較發射與回波的頻率差值,藉以得到電磁波由發 射機到目標物,經過反射折回的時間。 2、目標的相對速度:運用都普勒效應。若雷達與目標在波的行進方向有相 速度,則觀測到的頻率會隨著相對速度的大小產生頻率漂移 fd=(2v/c)f0 (1-1) 其中 v 為雷達與目標物之相對速度在電磁波行徑方向上的分量,c 為光 速,fo為發射電磁波頻率。fd為都普勒偏移頻率。 1/ 4 2 2 max 3 min (4 ) t PG R P (1-2) (1-2)為雷達方程式,Pt 為發射的能量大小,G 為天線增益,σ為目標物相對反 射面積,Pmin 為系統靈敏度,Rmax 為最遠可偵測距離。λ為操作頻率的波長。
T
XR
XTarget
Distance,
Speed
Target
Distance,
Speed
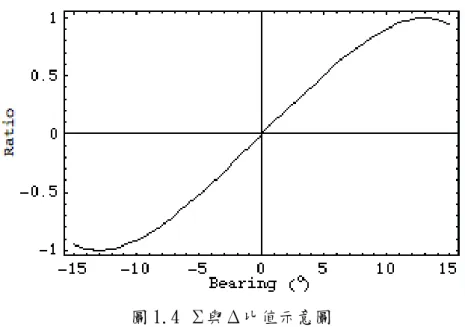
圖 1.2 防撞雷達功能示意圖 1.3 單脈衝技術探討[6] 單脈衝技術,也就是同時比較Σ回波與Δ回波的技術,主要是用來偵測物體 角度的方法。更精確地說,當雷達發射訊號,碰到物體反射後,經過設計的雷達 接收器會產生兩種訊號,Σ與Δ,分別經過同樣放大之後,比較它們的訊號比值, 便可得知物體的角度。因為只要雷達打出一個脈衝波,經過一次比較便可得知角 度,所以此技術便稱為單脈衝技術,也就是 Monopulse。 在做比較之前,我們需要有兩種的天線場型。一般的作法是,利用兩個一模 一樣天線,當饋入同相位的訊號時,我們稱之為 sum signal(Σ);當饋入反相 位的訊號時,稱之為 difference signal(Δ)。如圖 1.3。 圖 1.3 Σ與Δ天線場型示意圖圖 1.4 Σ與Δ比值示意圖
此外,因為Σ與Δ相位的關係,假設物體在雷達的右前方,比值為正;物體 在雷達左前方,比值為負。之後,我們便可利用所設計出的Σ與Δ場型,建立一 張表:不同角度對應不同比值,如圖 1.4。當雷達接收到訊號,對照此表即可判 斷出物體角度。
第二章 24GHz 連續調頻單脈衝技術之雷達系統
2.1 雷達系統架構RF circuit
Antenna System
RF circuit
Antenna System
圖 2.1 雷達系統架構圖 圖 2.1 為 24GHz 連續調頻單脈衝技術之雷達系統架構圖。雷達系統主要由 兩部分所組成,一為 RF 電路模組與天線;另一部份則是 IF 放大器、頻率調變控 制器與訊號處理電路。 在天線部份,曾有文獻運用消除漏到接收端之傳送訊號的技術,採用單天線 架構[7,8]。但為了使傳送路徑與接受路徑的隔離度達到最好,我們採用雙天線 架構[9,10],傳送天線使用單串的微帶陣列天線。接收天線為了產生Σ與Δ的訊 號,使用兩串的微帶陣列天線。 高頻電路部份,一開始需要一個 6GHz 的電壓控制震盪器(VCO)來當作訊號 源,同時此電壓控制震盪器的可調頻率需覆蓋操作的頻段。此訊號源會經過 6GHz to 12GHz 的倍頻器與 12GHz 的放大器。在 12GHZ 放大器之後,使用功率分配器, 一端經 12GHz to 24GHz 倍頻器、24GHz 功率放大器與濾波器,透過槽孔耦合由 天線傳送出去;另一端的訊號經 12GHz 的放大器與功率分配器之後,當作二諧混 頻器的本地訊號。而二諧混頻的 RF 訊號由接收天線接收後,經槽孔耦和、濾波 器,分成Σ與Δ的訊號,這兩種訊號在通過 LNA 後,將與本地訊號做混頻動作。 低頻電路部份包含 IF 放大器、頻率調變控制器與訊號處理電路。IF 放大器提供電壓增益同時也可扮演主動的濾波器。而頻率調變控制器與訊號處理電路整 合在一啟,將可降低同步誤差。 2.2 Σ與Δ設計 要製作產生Σ與Δ訊號的電路,通常採用 rat-race 的電路。如圖 2.2,此 電路是由 3 段 90 度與 1 段 270 度的傳輸線所組成,阻抗為 2 Zo(Zo 為每個埠的 阻抗)。當兩支天線分別接上埠 1 與埠 2,便可從其他兩埠取得Σ(兩天線在Σ埠 同相位)與Δ(兩天線在Δ埠反相位)的訊號。因為這是對稱的架構,所以訊號強 度比較不會有不平衡的的情形產生。但缺點是一但使用這種電路,由於Σ與Δ的 埠被隔開,在需要跳線的情況下,並不好實做。而且操作頻率在 24GHz 也不適合 使用跳線。 Σ Δ 1 2 圖 2.2 Rat-race 電路圖 因此我們決定採用枝幹耦合器再加上 90 度傳輸線的方式,達成與 rat-race 相同效果的電路。如圖 2.3。當訊號同時由埠 1 與埠 2 饋入時,埠 1 的訊號將與 埠 2 的訊號在Σ埠相位一樣;而在Δ埠埠 1 與埠 2 則成反相位。也就是說,此電 路是利用枝幹耦合器所產生的 90 度相位差,再加上埠 1 與埠 2 的傳輸線相位差 90 度,達成與 rat-race 一樣的效果。因為 90 度傳輸線在 24GHz 的長度很短, 所以走線損失所造成的天線Σ與Δ場型不對稱將可以忽略。 1 2 Δ Σ 180o 90o 圖 2.3 枝幹耦合器+90 度傳輸線電路圖
圖 2.4、2.5 為枝幹耦合器的 S 參數量測圖與枝幹耦合器 S21 與 S31 相位圖, 在 24GHz 附近頻率的反射係數(S11)與隔離度(S41)都有良好的效果。而 S21 與 S31 也都維持差不多的大小。 Frequency GHz 22 23 24 25 26 dB -45 -40 -35 -30 -25 -20 -15 -10 -5 0 S21 S11 S41 S31 圖 2.4 枝幹耦合器 S 參數量測圖 Frequency GHz 22 23 24 25 26 Angle -150 -100 -50 0 50 100 150 Ang[s21] Ang[s31] 圖 2.5 枝幹耦合器 S21 與 S31 相位圖 1 4 2 3
2.3 24GHz 垂直傳輸微帶線設計 垂直傳輸技術在多層板製作常常被運用到。而傳統大部分都是使用通路孔 (via hole)來達成此效果。但是當操作頻率越來越高時,通路孔的效果將會大打 折扣:插入損失(insertion loss)變高與頻寬下降。此外,通路孔在製作上也比 較費工。為了解決這個問題,非連接性的垂直傳輸技術將顯的非常重要。其中有 一種做法稱為槽孔耦合(cavity couplers)[11,12]。 Ground plane Cavity Microstrip line Dielectric subtrate Ground plane Conductor Microstrip line Dielectric subtrate
Slot on ground plane
Slot on ground plane
圖 2.6 金屬槽孔耦合示意圖 圖 2.6 為槽孔耦合的幾何圖形,使用微帶線饋入。一個金屬體槽孔夾在兩個 傳輸線中間,每個傳輸線的地都有耦合縫隙。兩個傳輸線的耦合縫隙長寬相同且 對稱於金屬體槽孔。為了達到最大的耦合量,微帶線被設計成與耦合縫隙垂直且 對稱於縫隙的中心。 此篇論文[11]提出的槽孔耦合方法有兩種:第一種是將金屬體槽孔當作波導 管來使用;第二種則是將金屬體槽孔操作在非共振模態。因為第一種作法需要在 金屬體槽孔填充高介電係數的材料來減少它的體積,製作上比較費工。所以我們 採用第二種方法來設計寬頻的垂直傳輸,且須能覆蓋雷達的操作頻率。
為了達到寬頻的應用,我們須把第一共振頻率設計在非常高的頻率(相對於 想要的操作頻率)。所設計出來的圖形參數如表。使用板材為 RO4003,板厚 8mil, 介電係數 3.38。此填充空氣的金屬體槽孔的第一共振頻率為 104GHz。圖 2.8 為 電磁軟體 HFSS 的模擬結果與量測結果。S21 的模擬結果在 22~26GHz 的頻段都落 在 0.7dB 附近。而量測的結果 S21 也大致上與模擬吻合,約落在 0.8dB 附近。各 參數的影響結果將在之後討論。
l
c(=
l
s) w
c(=w
s)t
cw
mt
sl
t
rs
rc 5.1 0.7 1.5 0.46 0.2032 0.5 3.38 1.0 表格 2.1 金屬槽孔耦和圖形參數 (單位:mm) 圖 2.7 垂直傳輸之金屬槽孔耦合實體圖Frequency GHz 22 23 24 25 26 dB -70 -60 -50 -40 -30 -20 -10 0 S21(measurement) S11(simulation) S21(simulation) 圖 2.8 槽孔耦合_HFSS 模擬結果 S11、S21 與量測結果 S21。 由於安裝時,板子的對位仍會有些微的誤差,因此我們先來觀察此誤差所造 成的影響。圖 2.9 為板子對位偏移的模擬結果。因為實做上我們會用螺絲孔當作 對位使用,考慮的偏移誤差在 Y 方向 1mm 之內,槽孔耦合的插入損失最大仍維持 在 1dB 以內,圖 2.9。因此實做上板子對位不準所造成的偏移影響屬於可接受的 範圍。 Frequency GHz 22 23 24 25 26 inser tion l oss (dB) -5 -4 -3 -2 -1 0 offset_0.3mm offset_0.5mm offset_0.7mm offset_1.0mm 圖 2.9 板子對位偏移從 0.3~1mm 的模擬結果
接著我們來探討
l
t係數的影響。圖 2.10 顯示當l
t增加時,將會導致嚴重的 插入損失。這是因為這段 open stub_l
t 的變化對於組抗匹配有很大的影響,當l
t經過適當的調整,垂直傳輸的特性就非常理想。 Frequency GHz 22 23 24 25 26 inser tion loss (dB) -12 -10 -8 -6 -4 -2 0 lt_0.5mm lt_1.0mm lt_1.5mm lt_2.5mm 圖 2.10l
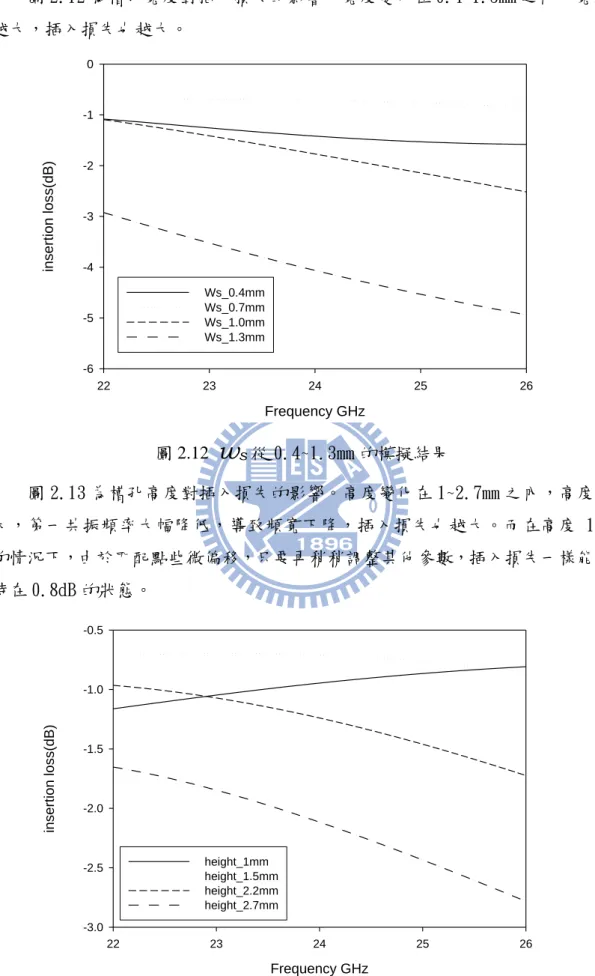
t從 0.5~2.5mm 的模擬結果 圖 2.11 為槽孔長度對插入損失的影響。大致上長度的變化在 4.3~5.9mm 之 內,槽孔的第一共振頻率不會改變太多,因此插入損失皆能維持良好的特性。 Frequency GHz 22 23 24 25 26 insetion loss (dB) -5 -4 -3 -2 -1 0 ls_4.3mm ls_4.7mm ls_5.1mm ls_5.5mm ls_5.9mm 圖 2.11 ls從 4.3~5.9mm 的模擬結果圖 2.12 為槽孔寬度對插入損失的影響。寬度變化在 0.4~1.3mm 之內,寬度 越大,插入損失也越大。 Frequency GHz 22 23 24 25 26 inser tion l oss (dB) -6 -5 -4 -3 -2 -1 0 Ws_0.4mm Ws_0.7mm Ws_1.0mm Ws_1.3mm 圖 2.12
w
s從 0.4~1.3mm 的模擬結果 圖 2.13 為槽孔高度對插入損失的影響。高度變化在 1~2.7mm 之內,高度越 大,第一共振頻率大幅降低,導致頻寬下降,插入損失也越大。而在高度 1mm 的情況下,由於匹配點些微偏移,只要再稍稍調整其他參數,插入損失一樣能維 持在 0.8dB 的狀態。 Frequency GHz 22 23 24 25 26 inser tion l oss (dB) -3.0 -2.5 -2.0 -1.5 -1.0 -0.5 height_1mm height_1.5mm height_2.2mm height_2.7mm 圖 2.13t
c從 1~2.7mm 的模擬結果2.4 6GHz 壓控震盪器[13]
在測距雷達的各個電路元件中,壓控振盪器是最主要的元件,此電路所採用
電晶體,它具有低雜訊、高增益、ft =25GHz。振盪器電路採取共集極方式,偏壓
點選擇VCE =3.5V ,IC =18mA,VBE =0.9V。偏壓點的選擇會影響輸出功率與相位雜 訊。變容二極體則採用具有低串聯電阻、高電容值比的特性。壓控振盪器的整體 電路架構如圖2.14 所示,實體照片電路如圖2.15。
圖 2.14 壓控震盪器電路圖
圖 2.15 壓控震盪器實體電路圖
壓控振盪器實部與虛部阻抗模擬如圖2.16,在5.6 至6.8 GHz 皆有負阻,故 這樣的架構下從5.6至6.8 GHz 皆可以拿來設計振盪器,而在6 GHz 附近虛部阻 抗為0,滿足振盪條件。表2.2 為輸出功率量測結果,此壓控振盪器的輸出功率 約為12 dBm。 圖 2.16 輸入阻抗之實部與虛部模擬圖 表 2.2 輸出功率、Phase noise 量測表格,輸出功率為 12dBm
圖 2.17 為相位雜訊的量測結果,輸出之相位雜訊約為-97 dBc/Hz@100kHz 左右(量測是利用 CIC 信號源量測儀器)1MHz offset 的地方量到其相位雜訊約 -121 dBc/Hz 左右,就一個 6 GHz 左右的壓控振盪器而言,這樣的相位雜訊可說 是相當理想。圖 2.18 為輸出頻率對電壓關係圖,0 至 5V 的調變範圍從 5.95 至 6.21GHz,相對到 24GHz 大約可以產生 1GHz 頻寬的調變。圖 2.19 所顯示的輸 出訊號一階與二階諧波的功率圖,可看出一階與二階諧波的功率相差 20 dB 快 30dB 以上。 圖 2.17 相位雜訊量測圖 圖 2.18 輸出頻率與電壓關係圖
2.5 6GHz 至 12GHz 倍頻器 傳統設計平面電路倍頻器二倍頻的方法,是利用原本單頻的信號經過非線性 的雙埠元件,將產生許多的倍頻率的諧波,再經由外部網路的篩選,這樣我們就 可以取出想要的倍頻信。其中的非線性元件,可以是單端二極體(single-ended)、 反平行並聯的二極體(anti-parallel)或是電晶體。若是由二極體所組成的倍頻器, 其轉換增益一定會是負值的,不過其優點則是可以操作到相當高的頻段,W-band 的倍頻器幾乎都是使用二極體來實現它,而電晶體則有操作頻段不高的缺點,但 是相反的來說,使用電晶體來實現的倍頻器就有機會可以得到正值的轉換增益 [14]。圖2.20 為倍頻器之模型意示圖。 圖2.20 倍頻器之模型意示圖 在輸入網路的部份,在非線性元件的輸入端並聯一段短路傳輸線,此傳輸線 等效的長度為基頻的四分之一波長,對於基頻的信號來說,此段傳輸線在史密斯 圖上由短路走向開路,因此對於基頻來說在此並不會看到這段傳輸線,但對二倍 頻的信號來說,此時傳輸線在史密斯圖上是由短路走向開路後再走向短路,所以 對於二倍頻率信號在此將被完全反彈,因此不會進入至輸入端對輸入端造成影 響。最後由輸入端的匹配網路將倍頻器匹配到50歐姆,在此時要注意的地方是匹 配的中心頻率為一倍基頻。 在輸出網路部份,在非線性元件的輸出端並聯一段開路的傳輸線,此段傳輸 線等效的長度為基頻信號的四分之一波長,對於基頻信號走到這來說此段傳輸線 在史密斯圖上是由開路端走向短路端,所以可以知道基頻信號將完全的被反彈回 去。而對於二倍頻的信號來說,此段傳輸線是在史密斯圖上由開路走向短路後再 走向開路,所以對於二倍頻的信號來說在此是看不到這段傳輸線的,因此不會對 輸出端造成影響。最後再由輸出端的匹配網路來將倍頻器匹配至50歐姆,在此時
的匹配中心頻率是為二倍頻。 在此雷達架構中,我們需要兩個倍頻器,一個是在VCO輸出接上的6 GHz至 12 GHz 主動倍頻器,另一個是在經過功率分波器到發送端上的12GHz至24GHz 主動倍頻器。此6至12GHz倍頻器,設計上所使用的電晶體偏壓在VDS = 1.4V, ID=18mA ,圖2.21 為6 GHz 倍頻器的實際照片,實際電路大小約為12x14mm; 圖2.22 與圖2.23 為此6至12GHz 倍頻器的輸出功率量測結果與轉換損耗圖,輸 入功率為12 dBm 下12 GHz 的輸出功率約為5dBm,轉換損耗(Conversion loss) 為7dB。圖 4-8 6 GHz 至12 GHz 倍頻器照片 圖2.21 6GHz 至 12GHz 倍頻器實體圖 圖2.22 6GHz 至 12GHz 倍頻器輸出功率量測圖
2.6 12GHz 訊號放大器 因為在我們的雷達系統中所使用的是頻率調變,頻率調變下放大器的飽和與 否雖不會影響輸出,且我們期望可以將12 GHz 的輸出信號推至放大器的飽和狀 態,因為壓控振盪器在做頻率調變時可能會產生一些振幅上的改變可視為振幅調 變信號,當電路後端的放大器飽和時即可以抑制掉振幅調變信號的雜訊,在此我 們設計一個12 GHz 的放大器,採用的電晶體為Fuji 的FHX76LP。 由於次階混波器需要較大的基頻功率來推動,因此在接收機的本地信號端必 須加上一個12 GHz 的放大器來增加推動混頻器的功率,放上此放大器也有助於 改善發射機與接收機的隔離度,以及抑制頻率調變時所產生的振幅調變雜訊。次 階混波器所需要的12 GHz 放大器,也使用同樣的電晶體來設計。為了使系統組 裝方便,避免使用負電壓,我們採用VGS = 0 V ,也就是洩極(Drain)電流為IDSS 時 的偏壓來作設計。 圖 2.24 為電路示意圖,電晶體源極(Source)的腳位直接經由Via 灌孔電鍍 接地,電晶體偏壓於VGS = 0 V , ID = 35 mA 的狀況下,在這個偏壓點下我們可 以得到較大的增益與飽和輸出功率,雖然這類型(V V GS = 0 )的偏壓設計有可能導 致二次項階波( 2nd -harmonic)較大,但我們的系統中二次項階波24 GHz 是我們最 終所須要的頻率,故這樣的缺陷並不會造成設計上的困難,然而其單端偏壓的特 性在設計上提供相當大的便利;設計上我們先對輸出匹配做固定增益設計,設定 我們所要的增益範圍約13 dB,於洩極接上一個輸出匹配電路,此匹配電路由一 段串聯傳輸線和Open Stub傳輸線構成,藉由調整Stub線的寬度、間距、與長度並 適當改變串聯傳輸線的長度來得到我們所需要的輸出阻抗,並且加上一段RF choke 作為偏壓電路;閘極(Gate)接上一段輸入匹配電路來匹配放大器的輸入阻 抗,輸入匹配電路使用相同的Open Stub 的設計並加上一四分之波長的RF Chock
到地,這樣的設計正好可令VGS = 0 V 。
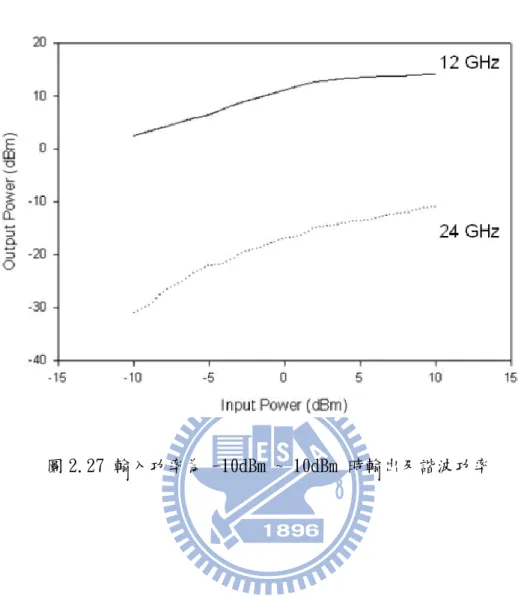
圖2.25 為12 GHz 放大器的實際照片其大小約為11mm×12mm。圖2.26 為實 際量測結果。量測結果顯示12 GHz 增益有11.686 dB,輸入損耗(S11)為-17.047 dB,輸出損耗(S22)為-13.647 dB,因量測時有線損失及接頭損失,如果加入此項 因素則,此量測結果與模擬結果就很吻合。圖 2.27 是在輸入12 GHz 信號的功 率為-10dBm至10dBm 時,輸出波形一階至二階諧波的功率量測圖,12 GHz 的 訊號約為13dBm,一階與二階諧波差了約30dB。輸出功率的平坦度在我們要的 頻寬下都小於0.5dB,平坦度很好確實有在我們設定的範圍之內。所放大過後的 輸出功率也足以推動兩顆混頻器。 圖 2.25 12GHz 放大器電路實體圖 圖 2.26 12GHz 放大器量測結果
2.7 12 GHz 至 24 GHz 主動倍頻器(Doubler) 在雷達架構中,第二個倍頻器是12 GHz至24 GHz主動倍頻器。在12至24 GHz 的倍頻器中,設計上所使用的電晶體與上面的12GHz倍頻器及放大器相同,偏壓 在 V DS = 1.6 V ,ID = 20mA,圖2.28為12 GHz 至24 GHz 倍頻器的實際照片實際 電路大小為8mm×10mm ;圖2.29 為12 GHz至24 GHz倍頻器的功率量測結果,輸 入功率在-5dBm至10dBm下,24 GHz的輸出功率在我們此設計中的輸入範圍內約 為3dBm,轉換損耗(Conversion loss)約為3~4dB,圖2.30。 圖2.28 12 GHz 至24 GHz 倍頻器實體電路照片圖 圖2.29 12 GHz 至24 GHz 倍頻器輸出功率量測結果
2.8 24 GHz 低雜訊放大器 在此雷達中的LNA 設計,我們為了得到較高的增益表現,所以我們使用了 兩級的主動元件來設計,下圖2.31所表示的是兩級放大器可用功率和實際功率之 示意圖。 圖2.31 兩級放大器可用功率和實際功率之示意圖。 圖2.32所表示的是兩級放大器的雜訊模型,雜訊指數值的大小主要是由第一 級放大器之雜訊指數所主宰;當到第二級放大器的時候,其雜訊指數已經縮減為 第一級放大增益倍,其雜訊影響已減小。且其雜訊與第一級放大器的功率增益成 反比。所以當第一級的放大增益過小時,第二級放大器的雜訊指數影響才會變大。 圖2.32 兩級放大器雜訊模型 圖2.33為兩級放大器之實際電路圖,兩級放大器的大小約為35mm×11mm, 其工作電壓為Vdd = 5 V,兩級總電流約為78mA,圖2.34為電路模擬S參數結果。 圖2.35為兩級電路實際量測的S參數。這邊看到的實際電路和原本模擬的結果, 有些許的不相同,原因是因為在模擬時無法有效的控制偏壓電路,只能選擇其中 一組偏壓來執行,但在實際量測時,為求有較好的效能,有動了其中的偏壓電路,
所以有造成實際量測和模擬些許不同的地方,最後當然是以實際的量測為主要電 路設計及應用在我們的電路上面。另外就是量測s 參數的時候,因為此元件的使 用頻段並不是在24 GHz,所以量出來的結果會有些許的不同,但在取平均的情 況下,我們來使用模擬設計,所以會不同之處。在設計低雜訊放大器的時候,其 信號源阻抗的選擇對整個電路會有很重要的影響。圖2.36為兩級低雜訊放大器利 用agilent 的N8975A Noise Figure Analyzer 所量測到的NF,在我們所需要的頻段 內(24.025 GHz~24.225 GHz)其NF 值在2.6~2.9 之間。
圖2.33 兩級放大器電路實體圖
圖2.35 兩級放大器電路實際量測圖
2.9 次階混頻器 我們採用次階混頻器來取代一般的混頻器;次階混頻器有別於一般的混頻器, 其本地信號是以 RF 信號的 1/2 頻率來推動,亦即 RF 是 24GHz 時本地信號是使 用 12GHz 左右的信號,二極體或電晶體經由適當的設計皆可以達成這樣的目 標,而其中又以使用反對稱(Anti- parallel)的二極體來設計最佳,利用 Anti-parallel 二極體設計的次階混頻器其轉換效率最高,並且有最好的(LO to RF)隔絕度。所使用的元件是反對稱二極體,圖 2.37 左端是本地信號的輸 入,使用一個長度為 12GHz 之 1/4 波長的階地傳輸線來抑制掉從 RF 端漏過來 的 24GHz 信號以提高轉換效率,此段傳輸線對於 12GHz 信號而言是高阻抗,因 此不會影響 LO 信號輸入,對於 24GHz 而言是剛好 1/2 波長,因此看到的是接 地,會造成全反射而將 RF 信號全部集中在二極體周圍,避免漏到 LO 端而降低 了其轉換效率;右邊是一段長度為 12GHz 之 1/4 波長的開路傳輸線,此開路傳 輸線相對於 12GHz 信號而言是接地,因此可以抑制掉 12GHz 信號漏到 RF 端, 而對於 24GHz 信號而言是高阻抗,並不會影響 RF 信號進入混頻器,最後混出 來的中頻信號經過一個 RF choke 後從 IF 端輸出。圖 2.38 是此次階混頻器量 測的轉換損耗,其轉換損耗大約為 17dB 在本地信號 12GHz 輸入功率為 10dBm 的情況下;圖 2.39 是量測到的 RF 輸入功率與 IF 輸出功率圖,在輸入功率小 於-10dBm 時,輸入與輸出成線性關係,轉換損耗為 17dB。 圖2.37 次階混頻器架構圖
圖2.38 混頻器模擬的轉換損耗
2.10 24 GHz 帶通濾波器(Band Pass Filter)
Band pass Filter 之用途是只使特定頻帶之訊號通過的電路,由於輸出入特性 需達到乾淨的輸出頻譜,所以我們在天線之後輸出入的地方加上24 GHz 的Band pass Filter,另外Band pass Filter 也可提升接收端的靈敏度。圖2.40為24 GHz Band pass Filter 實際的電路照片圖大小約為3mm× 8mm,圖2.41、圖2.42 為24 GHz Band pass Filter 實際量測的結果。
圖2.40 24 GHz Band pass Filter 實體電路照片圖
2.11 接收端Σ與Δ兩路不平衡討論 [15,16]提出利用 24GHz switch 來切換Σ與Δ訊號來避免使用兩路接收路徑 的不平衡情形。但因為市面上 24 GHz switch 的 IC 價格頗高,不適合用於低造 價的雷達。在本篇論文採用的架構為Σ與Δ訊號分別經過 24GHz 低雜訊放大器與 混頻器。而我們所設計 24GHz 低雜訊放大器,因為元件不是使用在這個頻段,所 以不同元件在 24GHz 的增益可能會有所出入,量測不同組的 24GHz 低雜訊放大結 合混頻器的轉換損失的差異性就變的相當重要。 圖 2.43 為 24GHz 低雜訊放大結合混頻器電路實體圖,我們分別量了 4 組, LO 頻率為 12.45GHz,功率從-0.5~12.5dBm,訊號從電路的右邊灌入;RF 頻率為 24GHz,功率為-20dBm,訊號從電路的左邊灌入。圖 2.44 為 4 組 24GHz 低雜訊放 大結合混頻器的轉換損失量測圖。LO 功率約在 9.5dBm 轉換損失達到飽和,在 LO 功率為 9.5dBm 時,轉換損失最好為 0dB,最差為 4.5dB。 圖 2.43 24GHz 低雜訊放大器結合混頻器實體圖 LO power (dBm) @frequency12.45GHz 0 2 4 6 8 10 12 14 Convers ion loss (dB) 0 5 10 15 20 25 30 35 1 2 3 4 IF frequency 900MHz fixed Rf power -20dBm@24Ghz 圖2.44 4組24GHz低雜訊放大結合混頻器的轉換損失量測圖
為了解決接收端兩路不平衡所造成的相位誤判,雷達必須透過校正才能正常 工作,本篇論文所使用的校正方法是,由雷達所量測到Σ與Δ的訊號,透過已知 的Σ與Δ天線場型來回推兩路接收路徑的差異值。譬如圖 2.45,同個物體雷達 Σ所量測到的最大訊號比Δ的最大訊號少 2dB,由已知的天線場型: Σ 最大增 益比Δ多 2dB,就可推得兩路的差異性為 4dB(2--2)。之後每次雷達所量測到Σ 的訊號都先加上 4dB,再和Δ做比較,便可正確判斷出物體方位。 圖 2.45 雷達校正示意圖 Angle (degree) -20 -10 0 10 20 S um & Diff . powe r lev el (dB sc ale) -15 -10 -5 0 5 10 15 20 Sum_after adjust Diff. Sum_befter adjust 2dB 2dB
第三章 雷達系統整合量測與分析
3.1 雷達量測與討論 因為雷達射頻模組的電路由學生許少華所製作,天線為學生賴浩宇製作,整 合後共同量測。因此本章節為學生許少華與賴浩宇合作完成。 圖 3.1 為 24GHz 連續調頻&單脈衝雷達的射頻電路與天線實際照片,整個雷 達射頻模組的外觀尺寸約為 94mm94mm17mm(透鏡額外佔11mm 之高度)。圖 3.1(a)顯示金屬體一端的的電路包括了所有從 6~24GHz 的射頻電路,其中包括 VCO、兩個倍頻器、兩個 12GHz 放大器、一個 24GHz 的功率放大器與兩個 24GHz 低雜訊放大器、三個濾波器、兩個混頻器。在金屬薄板的另一端放置 24GHz 的收 發天線,如圖 3.1(b)。當射頻電路合成我們所需要的頻率調變波,透過天線陣 列輻射出去。當有目標物時,發送出去的訊號將被反射回來,被反射的回波由接 收端的天線陣列接收下來後,經過被動、主動元件的處理後,使用示波器量測Σ 與Δ的訊號比值及頻率。 基頻(baseband)電路與微控制器(MCU)組成的數位訊號處理模組, 如圖 3.2。其中包含中頻信號的放大器、單晶片的控制,此塊電路板主要的功能是在 利用微控制器產生隨時間改變的電壓值,進一步控制 VCO 來改變 RF 的調變波形 與控制 RF 輸出功率。 (a)射頻電路模組 (b)雷達系統收發天線 圖 3.1 雷達前端模組照片圖 3.2 數位訊號處理模組照片 圖 3.3 雷達量測環境與架設照片 圖 3.3 為雷達量測環境與架設照片,雷達掃頻頻率 24.025~24.225GHz,週 期為 3.73 毫秒(ms)。使用數位訊號處理器,如圖 3.2,送出三角波到 RF 電路由 發送端天線發射出去。接收端天線接收回波,經過低雜訊放大器、混頻器與中頻 放大後。使用示波器來比較Σ與Δ的比值與頻率。測量物體為直徑 30 公分的金 屬圓桶與小型轎車。我們分別將圓桶與轎車擺置於不同距離,並量出與在不
同角度的比值。以及在 15 公尺圓桶在正負 6 度與 0 度時,與相位關係圖以 及比值。 圖 3.4 為以直徑 30cm 之圓桶為目標物,距離雷達 15 公尺時,圓桶在正負 6 度與 0 度時,示波器所量測到的結果,當圓桶在正 6 度時,與Δ相位相同;負 六度時,與相位差了 180 度;0 度時,只剩有弦波訊號。這三張圖的頻率 都為 11KHz,與理論值計算出的 10.7KHz 相差無幾,這都相當符合理論的情況。 此外此套雷達對於相同目標物,模測到的最大訊號約較模測得的最大訊號少 2dB,又天線之模實際增益較模多 2dB,因此在做不同角度與比值圖時, 需先加上 4dB 來校正接收兩路的差異性。 圖 3.4 圓桶距雷達 15 公尺之Σ與Δ相位關係圖 圖 3.5 與圖 3.6 為量測圓桶與轎車在不同距離,角度從-20~20 度的與比 值圖,大致上不同距離比值的趨勢是一樣的。另外,無論圓桶或轎車,在 0 度時 不同距離的Σ與Δ比值皆無法達到 20dB 以上,這是因為 0 度附近時,Δ的訊號 已經小於背景雜訊,如圖 3.7,此時Σ與Δ的比值就變成Σ與背景雜訊比值,導 致比值下降。此外,當物體比較遠的時候,回波量比近距離小,而背景雜訊的值 是固定的,因此不管是圓桶或車子在 30 公尺 0 度附近時,比值都縮小。
Metal Cylinder Angle (degree) -20 -10 0 10 20 R atio ( dB) -10 -5 0 5 10 15 20 10M 15M 30M 圖 3.5 不同距離下-20~20°之Σ與Δ訊號比值圖(圓桶) Car Angle (degree) -20 -10 0 10 20 Ratio (dB) -5 0 5 10 15 20 10M 20M 30M 圖 3.6 不同距離下-20~20°之Σ與Δ訊號比值圖(小型轎車)
圖 3.7 背景雜訊示意圖 特別注意到的是,不管是圓桶或轎車,距離為 10 公尺的 0 度附近曲線都會 稍微胖一點,這是因為在近距離的時候,圓桶與車子都不能視為一個單點的物 體,示意圖如圖 3.8,因此雷達的與比值便由這些角度的平均值所決定。圖 3.8 中顯示值在正負角度的回波產生相消(斜線部分),僅留下直線部分的面 積;而值在正負角度卻是累積的,因而造成與比值將會比原本單點大些。 圖 3.8 示意圖
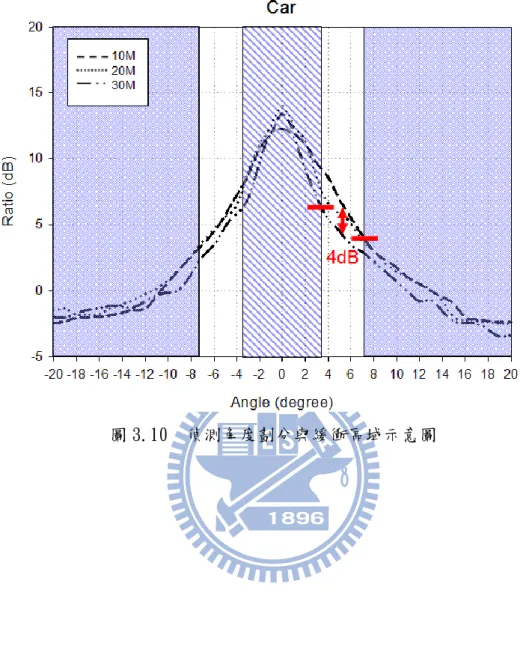
3.2 30 公尺判斷車道之雷達應用 從 3.1 節的雷達量測與討論中,我們得知實際量測到的雷達效能是與理論值 有些許的不同,這些值或多或少都會造成雷達某些程度的誤判。端看如何將雷達 作何種運用。 此篇論文所提出的 30 公尺判斷車道之應用,示意圖如 3.9,首先我們將雷 達的偵測角度區分成主要三塊:正負 3.3 度(本車道)、7 ~ 23 度(右方車道)與 -7 ~ -23 度(左方車道)。透過這樣的角度選擇,雷達在判斷車道的錯誤機率,便有 緩衝的空間,可緩衝的Σ與Δ訊號比值約為 4dB,如圖 3.10 中的非陰影區域。 此外,緩衝區在 10~20 公尺時大部分面積落於本車道;在 20~30 公尺時,大部份 面積位於旁車道。 當雷達打出連續調頻波,訊號碰到物體反射,再由雷達的接收後,計算出Σ 與Δ的比值與頻率後,根據所劃分的角度,便可判斷前方車體是在多少距離的本 車道、左方或右方車道。假使比值落於緩衝區,物體距離為 10~20 公尺之間,則 判斷為本車道;物體距離為 20~30 公尺之間,则判斷為左方或右方車道。 圖 3.9 30 公尺判斷車道之雷達應用示意圖
第四章 結論
本論文中設計一個 24-GHz 連續調頻單脈衝技術之雷達收發器,利用金屬槽 孔耦合的技術,將雷達面積縮小。此外,透過的學長們在雷達上建立的電路基礎, 終於可以完成連續調頻單脈衝技術的雷達前端模組設計,總體積為 9.4 × 9.4 × 1.7cm3 ,並使用數位訊號處理電路與示波器完成雷達的距離判斷及解析角度的功 能驗證。此雷達最遠偵測距離為 30 公尺,可偵測的角度為正負 25 度。 最後在實際車輛量測上,我們在靜態方式測量都得到良好的數據,且都得到 我們所想要的結果。在未來的目標,希望此雷達可以達到同距離多物體的偵測, 並改善系統的靈敏度,提升測量距離。同時,試著將射頻電路做成晶片,將雷達 縮小化。參考文獻
[1] S. Tokoro, “Automotive application systems of millimeter-wave radar,” IEEE Proc. Of Intelligent Vehicles Symp., pp. 260-265, 1996.
[2] H. H. Meinel, “Automotive radar and related traffic application of millimeter waves,” in Topical Symp. on Millimeter Waves, pp. 151-154, 1998.
[3] R. Mende, H. Rohling, “New automotive applications for smart radar systems, ” GRS Bonn, Sep. 2002.
[4] D. M. Pozar, Microwave Engineering, 3rd, John Wiley, New York, ch7, 2003.
[5] D. Richardson, “An FMCW radar sensor for collision avoidance,” IEEE Conf. On Intelligent Transportation System, pp. 427-432, 1997.
[6] S. M. Sherman, Monopulse Principles and Techniques, Artech House.
[7] J. G. Kim, S. Ko, S. Jeon, J. W. Park ,and S. Hong, “Balanced topology to cancel Tx leakage in CW radar,” IEEE Microwave and Wireless Components Letters ,vol. 14 pp. 443 – 445, Sep. 2004
[8] C. Y. Kim, J. G. Kim, and S. Hong, “A quadrature radar topology with Tx leakage canceller for 24-GHz radar applications,” IEEE Trans. Microw. Theory Tech., vol. 55, no. 7, pp.1438-1444, Jul. 2007.
[9] I. Gresham et al., “Ultra wideband 24GHz automotive radar front end, ” IEEE MTT-Symposium, Jun. 2003.
[10] M. Secmen, S. Demir, and A. Hizal, “Dual-polarised T/R antenna system suitable for FMCW altimeter radar applications,” IEEE Proceedings, Microwaves, Antennas and Propagation, vol. 153 pp. 407-412, Oct. 2006.
[11] E. S. Li, J. C Cheng, and C. C. Lai, “Design for broad-band microstrip vertical transitions using cavity couplers,” IEEE Trans. Microw. Theory Tech., vol. 54, no. 1, Jan. 2006.
transitions,” IEEE Trans. Microw. Theory Tech., vol. 51, no. 3, pp. 1034–1044, Mar. 2003. [13] 黃泓偉,24GHz頻率調變連續波雷達系統之前端電路設計與整合,碩士論 文,國立交通大學,2007。 [14] 陳信全,24GHz連續波雷達系統設計與整合,碩士論文,國立交通大學, 2004。
[15] V. Coiocaru, “A medium range low-cost Monopulse radar system for azimuth and range detection at 24GHz,” IEEE Wireless and Microwave Technology Conference, Dec. 2006, pp.1-3.
[16] V. Cojocaru, H. Kurata, D. Humphrey, B. Clarke, T. Yokoyama, V. Napijalo, T. Young, and T. Adachi, “A 24GHz low-cost, long-range, narrow-band, Monopulse radar front end system for automobile ACC applications,” in IEEE MTT-s Int. Microwave Sym. Dig., pp. 1327-1330, 2007.
[17] P. Varaiya, “Smart cat on smart roads: problem of control,” IEEE Trans. Automatic Control, vol. 38, no.2, Feb. 1993.
[18] H. H. Meinel, “Automotive millimeter wave radar,” in Digest of 2000 Topical Symposium on Millimeter Waves, Yokosuka, Japan, Mar. 2000.
[19] Q. Xue, K. M. Shum, and C. H. Chan, “Low conversion-loss fourth sub-harmonic mixers incorporating CMRC for millimeter-wave applications,” IEEE Trans. Microw. Theory Tech., vol. 51, issue 5, pp. 1449-1454, May 2003.
[20] M. Kunert, R. Doerfier, W. Hosp, C. Preis, “24GHz UWB short range radars for vehicular applications, ” MWE2003, Nov.2003.

![圖 2.6 金屬槽孔耦合示意圖 圖 2.6 為槽孔耦合的幾何圖形,使用微帶線饋入。一個金屬體槽孔夾在兩個 傳輸線中間,每個傳輸線的地都有耦合縫隙。兩個傳輸線的耦合縫隙長寬相同且 對稱於金屬體槽孔。為了達到最大的耦合量,微帶線被設計成與耦合縫隙垂直且 對稱於縫隙的中心。 此篇論文[11]提出的槽孔耦合方法有兩種:第一種是將金屬體槽孔當作波導 管來使用;第二種則是將金屬體槽孔操作在非共振模態。因為第一種作法需要在 金屬體槽孔填充高介電係數的材料來減少它的體積,製作上比較費工。所以我們 採用第](https://thumb-ap.123doks.com/thumbv2/9libinfo/7493576.115580/17.892.141.759.384.777/孔耦合入一個金中心此篇論文提出槽孔耦合方法第一種作法係數材料.webp)