南部橫貫公路邊坡災害評估及防治工法研究 子計畫:山區公
路邊坡災害預警及決策支援系統之研究(Ⅱ)
A study on the ear ly war ning and decision mar king system of landslides
for highway slope in mountain ar ea(Ⅱ)
主管單位:國科會永續發展委員會 計畫編號:NSC90-2625-Z-151-001 許 琦 高雄應用科技大學土木系
一、中文摘要
在去年的研究計畫中,已根據「射靶 理論」及模糊決策模式,發展出公路邊坡 預警決策支援系統,以進行監測及預測邊 坡破壞時間。然而本研究係將此系統應用 於南部橫貫公路之邊坡預警監測中,研究 結果顯示此系統不僅可被用於邊坡進行自 動監測和資料擷取與分析外,而且也能即 時預測邊坡的破壞時間及其破壞機率。 關鍵詞:模糊決策模式,邊坡破壞,自動 監測。Abstr act
The “Shoot-target theory method” (STTM) and Fuzzy decision-marking model (FDMM) have been applied to create the early warning and decision-marking system (EWDMS) for monitoring and forecasting the failure time of highway slope in last year project. In this study, by applying EWDMS on a southern cross-island highway slope of Taiwan, results show that this proposed system not only can be used to automatically monitor the displacement of slope and acquisition the data but also can be used to predict the failure time of slopes with probability in the early stage.
Keywor ds: Fuzzy decision-marking model, Slope failure, Automatic monitor.
二、緣由與目的
對 邊 坡 破 壞 時 間 之 預 測 , Saito and Uezawa(1961)[1]等人曾藉由應變速率與潛 變破壞所需時間之關係,發展出幾種推估 破壞時間之方法,例如概略預測法及迫近 預測法。然而概略預測法因無法確切知道 邊坡開始滑動的始動時間,而只能假定邊 坡在發生龜裂前後,其土體皆以相同速度 移動,進而造成預測之不準確性。迫近預 測法則需藉由三角形相似原理反覆求取邊 坡破壞時間,方可逐漸迫近邊坡真正之破 壞時間,而較難達成自動化預警之目標。 另外,福囿(1985)[2]則利用潛變速率倒數 與破壞時間之關係曲線,並考慮其具有 凸、凹型與直線型三類,用以修正 Saito and Uezawa(1961)假設為直線型之缺失,然而 由於預測時要先決定曲線型態,在應用性 上亦非很好。更何況影響邊坡破壞之環境 因素係隨時在變化,而使得預測工作更顯 困難。 有鑑於一般邊坡災害預警係以監測值 的大小或強度,並依擬定之管理值、警戒 值與行動值來發佈預警訊息。但由於未導 入時間與破壞機率,其可靠性常受到置疑 外,發布時機亦難以掌控。因此為改進此 種以空域監測值建模以及預警方式之缺 失,本文依據構建於現地邊坡之自動監測 系統所獲得時域與空域監測值,並利用灰 色與模糊集理論建立邊坡破壞可能時間之 預測模式,用以推測坡地崩壞時間與其可 能發生之機率,並據此時間和機率來發佈 預警警報。三、分析模式
3.1 邊坡破壞的「因」與「果」 就「因果論」的觀點而言,凡事有因 必有果,有果亦必有其因。根據此因果關 係可用以建立邊坡破壞模型,如圖 1 所示。 由圖 1 可知力與水等環境因子係邊坡崩壞 之「因」,而涵蓋地形、構造與材料的邊坡 為本模型之「物」,至於「果」的反應包括 山崩、地滑、土石流、泥流、沖刷和浸蝕 等現象。然而邊坡之「物」受環境作用之 「因」,而發生破壞反應之「果」的過程係 隨時間之箭而行,是無可回復。換言之, 時域存在於邊坡破壞之事實無可忽視。 3.2 模型分類 近年來邊坡破壞之預測分析模型,根 據圖 1 的因果模型亦概略可分成下列四大 類型。 1.以因建模:以雨量、降雨強度、有效雨量、 累積雨量及臨界雨量等因子當為發布預 警之指標,例如 Okade et.al(1994)[3]和許 琦等(2002)[4]模式。然而,由於此類模式 忽略材料及其他環境因子,而其精確度較 差外,一般僅應用於大區域之坡地災害的 氣象預報中。 2.以物建模:以地形、地質材料與地質構造 作為邊坡分析穩定與否之重要指標,其通 常被應用於坡地崩壞潛感分析作業中。例 如我國能資所所發展之山崩潛感分析模 式,即屬此類模式(潘國樑等,1985[5])。 3.以果建模:以邊坡滑移量、速度或加速度 做為研判邊坡破壞預警指標,並常配合先 前設定之管理值、警戒值和行動值等來發 布預警情況。例如日本道路公團、日本土 木研究所和日本高速道路調查會(1988) 等模式。 4.綜合建模:由因、物、果之二項以上者做 為分析邊坡崩壞與否之因子,而其在不考 慮時間之情況下,此類模型亦通常被選為 坡地崩壞潛感分析之使用。例如 Lee and Sheu(1989)[6]和 Juang et.al(1992)[7]。 3.3 模式建構 本文之預測模式係以空域之邊坡滑移 量並加以考慮時域及破壞機率進行建模, 其 係 將 裝 設 於 潛 在 危 險 邊 坡 之 感 測 器 (Sensors)所監測到之數據加以離散化,如圖 2 所示。圖 2 係表示直到目前時刻(tn)之監 測值往前所擷取到 m+3 筆的空域監測值 x 與時域 t 之等時距(△t)關係,並依時序排 列,共有 m+3 個原始數據,且可以用 (0) i x 表 示成(1)式所示。 } ..., , {()( ) ()( ) ()() ) ( n 1 m n 2 m n i0 0 i 0 i 0 i x x x x = − − − −但為計算方便,可將上式轉換成(2)式(請參 考圖 2)。 3 m M ; x x x x xi(0)={(i0)(1), i(0)(2), i(0)(k),..., i(0)(M)} = +
有鑒於地表的移動量係因果物的綜合 反應,因此本文僅用地表移動量來當為預 警建模之變量。而根據灰色模型 GM(1,1), 其解之形式如下(3)所示。 ak 0 1 0 1 e a b x a x k 1 1 − − − = + ) ( ) ( () ) ( )
若設邊坡滑 移量達設 定之危險灰值 ) (⊗
x
f , 邊 坡 可 視 為 破 壞 , 因 此 令 (3) 式 f 0 1 x x)( )(k+1)=⊗ ,再由灰色計算而可求得破 壞時距⊗kf,因此其可能破壞時間⊗tf 如 下所示。 監測值 (空域 ) 時間(時域) tn ⊗tf tn-i-2 tn-m-2 x n xn-i-2 xn-m-2 k=1 k=M k=⊗kf tf(m) i=m 危險(破壞)灰值, ⊗xf T 圖 2 監測值離散化 i=1 (3) (2) (1) (4) 圖 1 邊坡破壞模型 天人合一 道法自然 地滑、山崩、土石 流、泥流、沖刷、浸 蝕、沉陷、液化、隆 起、砂湧、淤積… 等 物 果 環境作用 邊坡 崩塌地 力:解壓、載重、風、 力、地震力… 等 水:雨、地下水、地 面水、溼度… 等 土岩 邊坡崩塌 史 註:… … 相類比性 因5 m N o . No .1 1 0 m 2 0 m 2 5 m 崩 塌 地 鋼 線 地 滑 計 固 定 端 自 動 擷 取 系 統 雨 量 計 圖 5 崩塌區地形及監測配置圖
若再設可能破壞時間之分布函數為常 態分布Tf(tf,σ),且在 m 夠多的情況下,則 可獲得其平均值
t
f 與標準差σ,進而可獲 得破壞時間之常態機率密度函數,如(5)式 所示。 ] ) ( exp[ ) ( 2 2 f 2 t t 2 1 t f σ πσ − − = 在預警模式方面,本文將破壤時間考 慮為具有模糊信息之事件,用以解釋「大 概距現在某時刻內會破壞」之人類思惟。 然而從模糊原理可知,此類思惟係可用模 糊事件T~={
tf≤~tp}
來表示,而其隸屬函數如圖 3 所示。另外對「距現在某時刻內可能發生 滑動破壞」之機率,亦可由(6)式表示。 ∫∞ ∞ − = ≤ =Ptf tp tf f tf dtf T P(~) ( ~) µ( ) ( )如果假設 Tf屬具有T~常態分布之機率 密度函數如(5)式所示,而模糊事件T~的隸 屬函數具有(7)式之線形型態,則可推導出 可能發生破壞時間
t
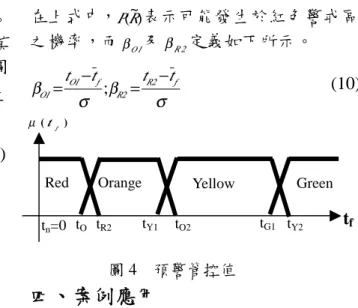
f 之機率函數如(8)式所 示。 ≥ < < − − ≤ = q f q f p p q f q p f f t t 0 t t t t t t t t t 1 t , , , ) ( µσ β σ β π β Φ β β Φ β β β β β Φ β β f q q f p p 2 p 2 q p p q q p q q p t t t t 2 2 2 1 1 T P − = − = − − − + − − = = , ; ) exp( ) [exp( )] ( ) ( [ ) , ( ) ~ ( 上式中,Φ()為標準常態分布之累積積分函 數。 本文之預警控管原理係依據監測物的 破壞特性以及災變應變能力,可將其分成 紅、橘、黃、綠四個警戒區如圖 4 所示。 各警戒區的隸屬函數係可允許決策機構自 行設定,至於預測到破壞時間歸屬何種警 戒,則可由破壞時間歸屬於何類之最高機 率來設定,其計算方法如(9)式。 )] ~ ( ) ~ ( ) ~ ( [ ) , ( ) ~ ( )] ~ ( ) ~ ( [ ) , ( ) , ( ) , ( ) ~ ( ) ~ ( ) , ( ) ~ ( ) , ( ) ~ ( R P O P Y P 1 2 Y 1 G 1 G P R P O P 2 Y 1 G 2 O 1 Y 2 Y 1 G Y P R P 2 O 1 Y O P 2 R 1 O R P + + − = − = + − = − = − = = β β Φ β β Φ β β Φ β β Φ β β Φ β β Φ
在上式中,P(R~)表示可能發生於紅色警戒區 之機率,而βO1及βR2定義如下所示。 σ σ β β R2 f 2 R f 1 O 1 O t t t t − = − = ;
四、案例應用
4.1 監測區概述 本應用案例係位於南橫公路台 20 號道 70k 附近之上邊坡上,其地質屬膠結不佳之 頁岩所組成,且曾於 2001 年納莉颱風時發 生破壞。然而為探討本文推導之預測模式 的適用性,在公路局總局同意下,於該處 設置二支地表地滑計進行滑動監測,如圖 5 所示。 4.2 系統架構 圖 6 為本自動監測預警系統之構架 圖,該系統主要係由感測器(Displacement (9) (10) (5) (6) (7) (8) t f 圖 3 隸屬函數 tn ) (tf µ tq tp tf Green tf tn=0 ) (tf µ tO 1 tR2 tY1 tO2 tG1 tY2Red Orange Yellow
圖 4 預警管控值 t ) M k ( tf = ⊗ f − ∆ ⊗
-4 0 4 8 12 91/6 91/7 91/8 91/9 91/10 91/11 91/12 Gauge 1 Gauge 2 0 20 40 60 80 100 120 91/6 91/7 91/8 91/9 91/10 91/11 91/12 Date 0 180 360 540 720 900 1080 0 2 4 6 8 10 12 91/6 91/7 91/9 91/11 92/1 92/3 92/5 92/7 92/9 Date 監測曲 線 預測破 壞時間 +1倍標 準差 -1倍標準 Sensor)、資料擷取(Data Acquisition)、分析 模式(Analysis Model)、網路傳送和警報管 理(Alarm Control)等五個子系統所構成。其 中感測器部份,包括地滑計二只以及雨量 計一只,並連接於監測區所設置之 IPC 電 腦上,而且在該電腦內安裝有如前節所述 的分析程式,用以擷取資料與分析、預測 及預警等工作。本監測系統所顯示之畫面 如圖 7 所示。 4.3 監測結果與討論 由於向公路總局申請借地,架構本系 統費時曠日,且直到本年(2002)六月底始完 成,而持續自動記錄至現今外,並將雨量 與地滑監測結果繪於圖 8 中。 從圖 8(a)之雨量記錄結果顯示本區今 年(下半年)日雨量最大約 100mm,總累積 雨量約在 1000mm 左右,而此種雨量並未 造成本區崩塌地繼續滑動,因為由圖 8(b) 二支地滑計記錄結果可知,除 2 號地滑計 量測到約 10mm 變形外,1 號地滑計並無 移動徵象,可獲得推證。此外由 2 號地滑 監測結果,並以本模式分析,預測其可能 滑動時間如圖 9 所示。從圖 9 可知預測破 壞時間約在半年以上,且其趨勢與量測曲 線無明顯交集之現象,換言之本邊坡目前 屬綠燈狀態,而暫無破壞之虞。
五、結論與建議
本 文 經 由 邊 坡 破 壞 的 因 與 果 以 及 其 模 型 分 類 之 檢 討,發 現 習 知 邊 坡 分 析 模 式 大 多 忽 略 時 域 之 影 響,而 僅 考 慮 空 域 監 測 值,並 經 常 用 經 驗 法 則 設 定 管 理 值、警 戒 值 以 及 行 動 值,以 作 為 邊 坡 災 害 預 警 之 依 據,但 由 於 缺 Landsl ide (m m )Ser ver Netcar d
Netcar d Networ k Data Acquisition Analysis Highway Contr ol Center Alar m Contr ol Sensor s 圖 6 系統構架圖 圖 7 南橫邊坡監控系統 圖 9 地滑量與預測破壞時間 T o ta l c u m u la tiv e ra in fa ll (m m ) D ai ly c u m u la tiv e ra in fa ll (m m ) 圖 8 雨量與地滑監測結果 Date L and slide ( m m ) (b)
乏 時 間,而 不 知 何 時 會 發 生 坡 壞 ? 或 是 發 生 破 壞 機 率 有 多 大 ? 造 成 決 策 者 難 以 正 確 決 策。有 鑑 於 此,本 文 依 據 在 現 地 構 建 之 監 測 系 統 所 擷 取 到 之 邊 坡 滑 移 量 , 並 利 用 GM(1,1)模 型 以 及 模 糊 機 率 模 式 建 立 一 套 公 路 邊 坡 預 警 模 式,俾 利 於 預 測 邊 坡 可 能 破 壞 之 時 間 與 機 率 。 此 外 , 由 日 本 高 場 山 地 邊 坡 發 生 崩 壞 等 案 例 加 以 驗 證,證 實 本 文 所 提 供 的 方 法,除 可 依 監 測 值 之 獲 得 進 行 持 續 動 態 分 析 外,模 式 亦 顯 示 在 越 接 近 邊 坡 崩 壞 時 刻 所 實 施 之 預 測 結 果,將 越 精 確。另 外 預 警 狀 態 係 依 可 能 發 生 崩 壞 之 餘 時 以 及 其 機 率 作 為 災 害 預 警 之 判 據,除 改 善 傳 統 預 警 值 設 定 之 盲 點 與 缺 失 外,亦 兼 具 人 類 思 惟 之 特 性 而 且 可 行 性 。 另 外 , 將 本 系 統 應 用 於 南 橫 公 路 70k 上 邊 坡 之 自 動 監 測 與 預 警 研 究 , 發 現 截 至 目 前 之 預 測 崩 壞 時 間 與 監 測 到 之 曲 線 並 無 明 顯 交 集 趨 勢,而 顯 示 其 係 處 於 穩 定 的 綠 燈 狀 態。然 而 , 下 次 豪 驟 雨 來 臨 時 得 否 穩 定,則 有 待 持 續 監 測 與 觀 察 。
六、參考文獻
1.Saito, M. and Uezawa, H., “Failure of Soil due to Creep”, Proceedings 5th International Conference on Soil Mechanics and Foundation Engineering, Paris, Vol. I, pp.315-318, 1961.
2.福囿輝旗,「表面移動速度 逆 數 用
降 雨 斜 面 崩 壞 發 生 予測 刻 時
法」, 地 ,第22期,第8~31頁,1985。
3.Okada, K. et. al, “Statistical Risk Estimating Method for Rainfall on Surface Collapse of a Cut Slope”, Soil and Foundation, Vol. 34 , pp49-58, 1994. 4.許琦,吳秉輯,「降雨與地滑關係之研 究」,第二屆高雄應用科技大學學術研討 會論文專輯,第 142~145 頁,2002。 5.潘國樑等,「台灣省重要都會區環境地質 資料庫」,工研院能源與資源研究所, 1985。
6.Lee, D. H. and Sheu, C., “A Fuzzy Model
for the Evaluation of Slop Stability”, Proceedings of the Japan-China(Taipei) Joint Seminar on Natural Hazard Mitigation, Kyoto, Japan, pp.303-311, 1989.
7.Juang, C. H., Lee, D. H. and Sheu, C., “Mapping Slope Failure Potential Using Fuzzy sets, ” Journal of Geotechnical Engineering, ASCE, Vol.118, No.3, pp.475-494, 1992. 8.鄧聚龍,「灰色系統基本方法」,中華理 工大學出版社,1987 9.李德河,「邊坡破壞時間之預測」,地工技 術雜誌,第 7 期,第 7~12 頁(1984)。 許琦,「荷重作用下岩石之依時組成模 式」,成功大學土木研究所博士論文,第 56~70 頁,1993。. 10.