在無線感測網路中基於不對稱繞送之行動性支援機制
52
0
0
全文
(2) 在無線感測網路中基於不對稱繞送之行動性支援機制 ARMs - Asymmetric Routing-based Mobility Supports for Sensor Networks. 研 究 生:賴俊羽. Student:Jun-Yu Lai. 指導教授:曾建超. Advisor:Chien-Chao Tseng. 國 立 交 通 大 學 資 訊 科 學 與 工 程 研 究 所 碩 士 論 文. A Thesis Submitted to Institute of Computer Science and Engineering College of Computer Science National Chiao Tung University in partial Fulfillment of the Requirements for the Degree of Master in Computer Science June 2008 Hsinchu, Taiwan, Republic of China. 中華民國九十七年六月. - ii -.
(3) 在無線感測網路中基於不對稱繞送之行動性支援機制 研究生: 賴俊羽. 指導教授: 曾建超 教授. 國立交通大學資訊學院資訊科學與工程研究所. 摘. 要. 本 論 文 針 對 會 動 態 改 變 網 路 拓 樸 的 無 線 感 測 網 路 ( Wireless Sensor Network),以感測網路上下傳輸資料量不對稱(一般而言,上傳資料量遠大於下 傳資料量)的特性為基礎,提出一套識別碼分配與封包繞送機制以支援感測節點的 漫遊與網路繞送路徑的修復。本機制在網路拓樸改變時,不須重新分配識別碼 (Identity)即可快速修復無線感測網路的繞送路徑。 在無線感測網路中,感測節點需要識別碼才能識別彼此,也因為如此,感 測節點所發出的網路封包才得以正確從傳送端到達目的地。然而無線感測網路的 網路拓樸會因為感測節點損壞或移動而改變,此時為了維持感測網路的運作,必 須修復網路的繞送路徑,而繞送路徑的修復機制則會因識別碼分配方式而不同。 識別碼的分配方式可分為兩大類:可繞送識別碼分配方式(Routable ID Assignment Mechanism)及不可繞送識別碼分配方式(Non-routable ID Assignment Mechanism)。可繞送識別碼分配方式是指識別碼本身帶有繞送資 訊,利用識別碼即可進行封包繞送,不需要利用額外的路由協定產生路由表,例 如 ZigBee 等。因此當網路拓樸改變時,必須重新分配行動感測節點以及其子樹 內所有節點的識別碼,否則會無法利用識別碼進行封包的繞送。然而重新分配識 別碼不僅需要大量的訊息傳遞,重新分配的時間也可能過長,造成節點間的連線 中 斷 。 此類機制的缺點在於識 別碼不具移動性(Mobility)及容錯(Fault - iii -.
(4) Tolerance)能力,因此當網路實體會移動或不定期損壞時不適用此類機制。 不可繞送識別碼的分配方式則是利用路由表進行封包繞送,這類方法在網 路拓樸改變時,不需重新分配識別碼,但必須更新相關節點上的路由表。更新路 由表會產生大量控制訊息,以進行繞送資訊的交換,造成額外負擔,而且更新的 時間也可能過長,無法快速、即時的修復繞送路徑。 本論文提出一套識別碼分配與封包繞送的機制,針對無線感測網路中感測 節點損壞或移動而產生的繞送問題,提供一套有效率的解決方案。為了避免由於 網路節點移動,而造成識別碼重新分配的問題,本機制採用不可繞送識別碼的分 配方式,利用一個管理單元集中的分配識別碼。而為了減少因為採用不可繞送識 別碼而產生封包繞送的負擔,同時有鑑於感測網路具上下傳輸資料量不對稱的特 性,本機制依據深度進行上行封包的繞送,而下行封包則採用來源繞送,因此不 需要額外的路由協定來產生路由表,即可繞送封包。 本論文對於所提出的方法,透過目前學術界廣為人知的網路模擬器 NS2 進 行模擬實驗,並以 AODV 及 Zigbee 做為比較對象。在實驗中,我們發現由於 AODV 需要許多廣播的控制訊息,因此無論是交遞的延遲時間,或是交遞所需要 的控制訊息量,AODV 都明顯比我們的方法多上許多;若以交遞成功的機率來 看,Zigbee 在多個行動節點同時移動時,由於受限於原本的網路拓樸,不易重 新加入網路,容易造成交遞失敗。 本機制可良好地支援行動節點的移動性(Roaming) 。同時,在此架構下, 由於行動節點可在網路間漫遊而不必重新取得新的識別碼,即可連接上另一個感 測網路,進行封包繞送,因此本論文亦可支援各種負載平衡機制,例如以電量或 封包流量為考量,調整各個無線網路內行動感測節點的個數。 關鍵詞:無線感測網路、行動性、來源繞送、ZigBee - iv -.
(5) ARMs - Asymmetric Routing-based Mobility Supports for Sensor Networks Student: Jun-Yu Lai. Advisor: Dr. Chien-Chao Tseng. Institute of Computer Science and Engineering College of Computer Science National Chiao Tung University. Abstract In this thesis, we proposed an identity assignment and routing mechanism. for the wireless sensor networks where the network. topology may change dynamically, due to sensor node mobility or failures. With the mechanism, a mobile node needs not acquire a new identity when the mobile node attaches to a new router node or visits a new sensor network, whereas still can receive/deliver packets continuously without interruption. Furthermore, the network needs not perform identity reassignment even when some node nodes are malfunction In wireless sensor networks, sensor nodes have identifies to distinguish each other and routes packets to specific nodes. However, the network topology of sensor nodes may change due to the malfunction or movement of sensor nodes. Each time when the network changes its. -v-.
(6) topology, it needs to re-establish the routing paths among sensor nodes. Nevertheless, mechanisms of recovery routing paths vary with identify assignment schemes. Identity assignment schemes can be classified into two categories: Routable ID Assignment mechanism & Non-routable ID Assignment mechanism. With Routable ID Assignment mechanism, sensor nodes, such as in Zigbee networks, can route packets in accordance of the regulation of identities and need not perform routing algorithm to exchange and maintain routing information. However, when the network topology changes due to sensor node mobility or malfunctions, the identities become inapplicable for packet routing. Therefore, we need to reassign the identities of the mobile or malfunction nodes and all of their descendants to reestablish the routing paths. However, re-assignment of identities may cause a large amount of control messages and long end-to-end delays, and lead to interruption of packet deliveries. With Non-routable ID Assignment scheme, sensor nodes cannot derive routing paths from the identities, and thus need to perform routing algorithm to exchange and maintain routing information for packet delivery. Therefore, no identity re-assignment is needed when the network changes its topology, because sensor nodes establish routing paths by exchanging routing information. However, routing information exchanges may cause a large amount of signal traffic among sensor nodes. Furthermore, the latency of such information exchanges is normally such long that the network cannot recover routing path quickly upon node - vi -.
(7) failures or movements. In this thesis, we propose a novel routing and identity assignment mechanism to support routing path recovery for node failures or movements in wireless sensor networks. In order to eliminate identity re-assignment overhead, we adopt the non-routable identity scheme and assume each node has a unique identity. Moreover, because in wireless sensor networks, downlink traffic is normally much higher than uplink traffic, we propose an asymmetric routing mechanism (ARM) for packet delivery. Furthermore, the proposed mechanism can also facilitate load balancing because nodes can switch points of network attachment very effectively. Finally, we conduct a simulation using a well known network simulator NS2 to compare the performance of ARM with Zigbee and AODV. Experiment results show that ARM can achieve a higher handoff success rate than Zigbee because the preset topology parameters of a Zigbee network restrain the identities that can be used in identity re-assignment. Nevertheless, compared with AODV, ARM incurs much less control messages and has a shorter handover delay because sensor nodes in AODV need to update routing paths upon node failures or movements.. Keywords:Wireless sensor network, Mobility, Source Route, ZigBee. - vii -.
(8) 致. 謝. 本論文能夠順利地完成,不是單單只倚靠個人的辛苦以及努力,而是要 歸功於許多人的指導、協助。在此,希望以我最誠摯的心意,向你們說聲「謝 謝」。 首先感謝我的指導教授曾建超教授,由於他不吝於分享其豐富的經驗與 知識,給予我論文上認真地指導與細心地協助、耐心地傾聽我的想法、關心 我的狀況。感謝共同指導教授曹孝櫟教授,讓我學會以謹慎的態度去看事 情、做研究。其次,要感謝口試委員蔡文能教授與翁永昌教授對於本論文非 常詳細的之指正與建議,使得本篇論文內容能更加完善。 特別感謝 RT 學長,以及兩位共同研究的夥伴宗羲、昭男。在 RT 學長 的領軍下,透過互相的督促鼓勵與學習交流,加上沒日沒夜的思考與共同討 論,使得本篇論文能順利完成,同時四人也能開心的如期同時畢業。 另外要感謝史老大、黃大師、大樑哥三位博士班學長,提供他們在相關 領域的專業知識、指出我研究上的缺失,並且不厭其煩的為我解惑。預祝三 位學長都能早日畢業,順利取得博士學位。 最後感謝徐媛莉等學弟妹們,在我餓的時候施捨我食物,在我跑模擬時 借我電腦,在我趕作業時陪我熬夜,在我懦弱時賜予我勇氣,無論是精神上 的鼓勵或是實質上的幫助,他們的陪伴讓我的研究所生活變得絢麗多彩。 最後,僅以此文獻給我祖宗十八代,感謝你們在背後無止盡的支持,讓 我能夠無後顧之憂完成學業。. - viii -.
(9) 目. 錄. 摘 要 ........................................................................................................................... iii Abstract .......................................................................................................................... v 致 謝 ......................................................................................................................... viii 目 錄 ........................................................................................................................... ix 圖目錄 ........................................................................................................................... xi 表目錄 ......................................................................................................................... xiii 第 1 章 . 緒論 ............................................................................................................ 1 . 1.1. . 研究動機 ......................................................................................................... 1 . 1.2. . 研究目的 ......................................................................................................... 2 . 1.3. . 章節簡介 ......................................................................................................... 3 . 第 2 章 . 研究背景與相關研究 ................................................................................. 4 . 2.1. . 研究背景 ......................................................................................................... 4 . 2.2. . 識別碼分配方式 ............................................................................................. 4 . 2.2.1. 可繞送識別碼分配方式 ................................................................................. 5 2.2.2. 不可繞送識別碼分配方式 ............................................................................. 6 2.3. . 繞送原則 ......................................................................................................... 7 . 2.3.1. 基於分散式路由表的繞送原則 ..................................................................... 7 2.3.2. 基於集中式路由表的繞送原則 ..................................................................... 8 2.3.3. 基於坡度的繞送原則 ..................................................................................... 9 2.3.4. 基於可繞送識別碼的繞送原則 ................................................................... 10 - ix -.
(10) 2.4. 第 3 章 . 單元總結 ....................................................................................................... 11 在無線感測網路中基於不對稱繞送之行動性支援機制 ....................... 12 . 3.1. . 簡介 ............................................................................................................... 12 . 3.2. . 基本概念 ....................................................................................................... 14 . 3.3. . 識別碼分配方式 ........................................................................................... 14 . 3.4. . 繞送演算法 ................................................................................................... 16 . 3.5. . 容錯性支援 ................................................................................................... 18 . 3.6. . 單元總結 ....................................................................................................... 22 . 第 4 章 . 模擬實驗結果與討論 ............................................................................... 24 . 4.1. . 簡介 ............................................................................................................... 24 . 4.2. . 模擬環境 ....................................................................................................... 25 . 4.3. . 實驗結果與分析 ........................................................................................... 28 . 4.4. . 單元總結 ....................................................................................................... 34 . 第 5 章 . 結論與未來工作 ....................................................................................... 35 . 5.1. . 結論 ............................................................................................................... 35 . 5.2. . 未來工作 ....................................................................................................... 36 . 參考文獻 ..................................................................................................................... 38 . -x-.
(11) 圖目錄 Figure 2-1 ZigBee網路位址分配方法 ........................................................... 5 Figure 2-2 Mesh Network .............................................................................. 6 Figure 2-3 AODV ............................................................................................... 7 Figure 2-4 Partial Source Routing .............................................................. 8 Figure 2-5 GRAd ................................................................................................ 9 Figure 2-6 Prime DHCP................................................................................ 10 Figure 3-1 Sensor Network ........................................................................ 13 Figure 3-2 無線行動感測節點加入網路時取得識別碼 .......................... 15 Figure 3-3 上行封包繞送原則 ...................................................................... 17 Figure 3-4 下行封包繞送原則 ...................................................................... 18 Figure 3-5 行動節點漫遊時不需重新取得識別碼 ................................... 18 Figure 3-6 繞送路徑容錯機制(上行) .................................................... 19 Figure 3-7 繞送路徑修復機制(下行) .................................................... 20 Figure 3-8 繞送路徑修復機制(下行) .................................................... 20 Figure 3-9 繞送路徑修復機制(下行) ................................................... 21 Figure 3-10 繞送路徑修復機制(下行) ................................................. 22 . - xi -.
(12) Figure 4-1 模擬環境 ...................................................................................... 26 Figure 4-2 同時移動節點數與控制訊息量的關係 .................................. 28 Figure 4-3 同時移動節點數與換手時間分佈 (AODV) ......................... 29 Figure 4-4 同時移動節點數與換手時間分佈 (Zigbee) ....................... 30 Figure 4-5 同時移動節點數與換手時間分佈 (ARMs) .......................... 30 Figure 4-6 同時移動節點數與交遞延遲時間的關係.............................. 31 Figure 4-7 同時移動節點數與控制訊息量的關係 .................................. 32 Figure 4-8 同時移動節點數與換手時間分佈 (AODV) ......................... 32 Figure 4-9 同時移動節點數與換手時間分佈 (Zigbee) ....................... 33 Figure 4-10 同時移動節點數與換手時間分佈 (ARMs) ....................... 33 Figure 4-11 同時移動節點數與交遞延遲時間的關係 ........................... 34 . - xii -.
(13) 表目錄 Table 4-1 模擬參數 ......................................................................................... 27 . - xiii -.
(14) 第一章 緒論 1.1. 研究動機 「行動性」 (Mobility) 代表一種時代的變遷,也反映出人類自由且不 願被束縛的天性,激發人類發展無線科技與小型電子裝置的渴望。在近年來 無線網路及嵌入式系統的快速發展之下,無線行動上網裝置已經漸漸走入人 們的生活之中,例如個人數位助理 (Personal Digital Assistant) 、智慧型 手機 (Smart Phone)以及個人行動電腦等,使用者不必再使用一條網路 線與區域網路的 Hub 或 Switch 相連。取而代之的,是連接基地台(Base Station)、無線網路存取站(Access Point)或無線隨意網路(Ad-hoc Network)等與網際網路緊密結合。 在未來的生活中,人類與無線網路將會密不可分,使用者隨時隨地與各 種網路連接,在技術上無線通訊網路可依據傳輸距離及覆蓋面積可劃分為廣 域網路(Wide Area Network,WAN)及區域網路(Local Area Network, LAN) ,無線個人區域網路(Wireless Personal Area Network,WPAN)。 由於行動性、便利性的需求,因此一人一台個人電腦的「一人一機」型態, 可能逐漸轉變成每個人擁有數個小型電子裝置的「一人多機」型態,甚至小 範圍內的電子裝置可以自成一個網路,方面進行資訊收集與交換,因此無線 個人區域網路以及無線感測控制區域網路 (Wireless Sensor Area Network,WSAN) 便成為現今熱門的議題。 然而,現今的無線感測控制區域網路,缺乏一種良好的行動性支援,使 得使用者在移動時,由於行動感測節點間繞送路徑的破壞,而無法進行訊息 交換,或是修復繞送路徑時使用太多控制訊息,造成不必要的電量浪費及網 -1-.
(15) 路負擔。抑或是交遞(Handoff)時,造成過久的延遲,無法滿足即時性較 高的應用,如遠距照護、工業控制等應用。 因此我們希望研究一種行動性支援機制,可以支援行動節點的移動性 (Roaming) 。當無線行動感測節點 (Wireless Mobile Sensor Node) 在 網路內部或不同網路間移動時,節點不會因為漫遊而造成本身或其他節點的 連線中斷。. 1.2. 研究目的 在傳統感測網路環境中,存在許多固定節點的識別碼分配機制及繞送演 算法,例如ZigBee[3] 或是Prime DHCP[9] 等。由於無法正確預測行動節點 的移動與損壞,造成封包無法在網路中正確的繞送,因此目前固定節點的識 別碼分配機制並不適合用在無線感測網路中。 而另一方面,目前實際應用的無線感測網路具有下列特性: 1.. 在無線感測網路中,為了避免特定節點過載,往往需要佈建多個閘道 器(Coordinator),以分散流量。. 2.. 由於多個無線感測網路通常為同一機關團體所佈建,因此多半會有一 管理單元(Fusion Center)對上述多個無線感測網路進行集中管理。 3. 在某些應用上,行動節點封包流向以出閘道器以外的節點為主,少部 分則是無線感測網路中行動節點間的訊息交換。 然而為了同時考量無線感測網路中行動節點的識別碼分配機制與繞送. 原則,與實際應用的無線感測網路所具有之特性,如果我們採用上述固定節 點識別碼分配機制針對行動節點分配識別碼,當負責繞送封包的行動節點損 -2-.
(16) 壞或移動,不可避免的會造成長時間局部網路中斷,或是需要大量訊息傳遞 以維持整體網路連通。 因此,本篇論文考量目前實際應用的無線感測網路環境,試圖提出一套 適合行動節點的行動性支援機制。此機制不但支援行動節點的移動性 (Roaming) ,使得行動節點在網路內部或不同網路間移動時,避免重新取 得新的識別碼,以造成連線中斷。而且也提供繞送路徑容錯(Fault tolerance)機制,當上層行動節點損壞或移動至其他地方時,行動節點可 立即修復繞送路徑,改由其他節點轉送封包。. 1.3. 章節簡介 z 第 1 章 緒論 簡介本篇論文的研究動機及目的 z 第 2 章 研究背景與相關研究 介紹相關背景知識及相關領域的研究概況 z 第 3 章 在無線感測網路中基於不對稱繞送之行動性支援機制 闡述本篇論文所提出的行動性支援機制,包括識別碼分配機制、繞送原 則及繞送路徑修復機制等。 z 第 4 章 模擬實驗結果與討論 描述實驗環境、參數設定及實驗結果分析與討論。 z 第 5 章 結論與未來工作 結論、本篇論文的總結以及未來可進行的研究方向。. -3-.
(17) 第二章 研究背景與相關研究 2.1. 研究背景 一般來說,在網際網路中,我們使用 IP 位址來識別網路上的節點;在 區域網路中,我們使用 MAC Address 來識別區域網路中的節點。在無線行 動感測網路中,每一個行動感測節點(Mobile Sensor Node)間同樣的也 需要利用識別碼才能識別彼此,也因為如此,行動感測節點所發出的網路封 包才得以正確從傳送端到達目的地。因此,我們將會探討目前現有的識別碼 分配機制,應用在行動節點上會有什麼樣的問題。 同時,由於識別碼分配機制往往需套用不同的繞送演算法,因此與繞送 原則密不可分,因此我們也會探討現今的繞送方式套用在無線行動感測網路 所造成的影響。. 2.2. 識別碼分配方式 如同上一節所述,本篇論文將目前識別碼分配方式大致上分為以下兩 類,可繞送識別碼分配機制 (Routable ID assignment mechanisms) 與 不可繞送識別碼分配機制 (Non-routable ID assignment mechanisms),將在下面分別說明之:. -4-.
(18) 2.2.1.. 可繞送識別碼分配方式. 可繞送識別碼係指帶有繞送資訊 (Routing information)的識別碼, 封包的繞送可不必透過路由表,而透過目的地識別碼進行繞送。在這類識別 碼的分配機制當中,多半由每個節點計算下層節點的識別碼,並且分配至各 實體,形成樹狀網路拓樸,以達到利用識別碼繞送封包的效果。例如:ZigBee 網路位址分配方法[3] 當中,在確定每個實體的最高連線數及連線層數等限 制後,利用運算公式求出每個實體可以分配的識別碼(如Figure 2-1所示), 每個網路實體皆可透過本身的識別碼、封包的目的地識別碼(Destination Address)以及鄰近節點表格 (Neighbor Table)等參數計算出Next Hop, 而不需路由表 (Routing Table)的幫助。. Routers at depth d+1 separated by:. Address of nth end device at depth d+1:. Parameters Cskip(d) :the size of the address sub-block nwkMaxChildren (Cm) nwkMaxDepth (Lm) nwkMaxRouters (Rm) depth (d). Figure 2-1 ZigBee 網路位址分配方法 -5-.
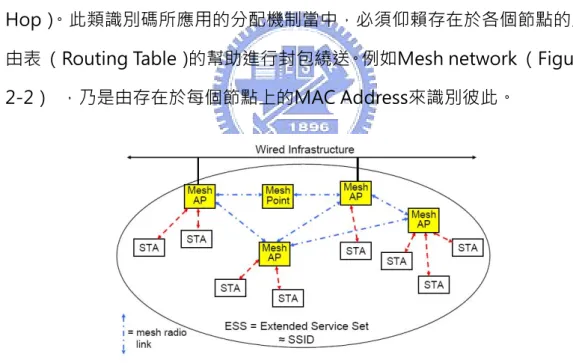
(19) 此類機制的缺點在於識別碼不具移動性(Mobility)及容錯(Fault Tolerance) ,當一網路實體的損壞或移動改變網路拓樸時,必須重新分配該 節點以及其子樹內所有節點的識別碼,否則會無法達到利用識別碼繞送封包 的效果。然而重新分配識別碼會造成節點間的連線中斷,為了重新建立連線 則需要大量的訊息傳遞。因此當網路實體會移動或不定期損壞時不適用此類 機制。. 2.2.2.. 不可繞送識別碼分配方式. 不可繞送識別碼 (Non-Routable ID)是指每個節點的識別碼與網路 拓樸無關,亦即不可利用目的地識別碼直接計算出下一個繞送節點 (Next Hop)。此類識別碼所應用的分配機制當中,必須仰賴存在於各個節點的路 由表 (Routing Table)的幫助進行封包繞送。例如Mesh network (Figure 2-2) ,乃是由存在於每個節點上的MAC Address來識別彼此。. Figure 2-2 Mesh Network 此類機制優點在於沒有識別碼分配效率的問題,以及使用較短的路徑繞 送封包,然而當一個或多個網路實體損壞或移動時,卻需要大量訊息傳遞以. -6-.
(20) 維護存放於各個節點的路由表 (Routing Table) ,造成額外的負擔。同時, 這類的機制由於需要更新多數的路由表,因此進行交遞時往往延遲的時間較 長,封包遺失情形也較嚴重。. 2.3. 繞送原則 若以繞送原則的不同作為考量的依據,由於無線行動感測網路的特性, 則可大致分為三類:. 2.3.1.. 基於分散式路由表的繞送原則. 基於分散式路由表的繞送原則,這類的方式是在每個行動節點上,會紀 錄著往其他行動節點的下一節點 (Next Hop),最具代表性的例子就是 AODV[7] (Figure 2-3). Figure 2-3 AODV. -7-.
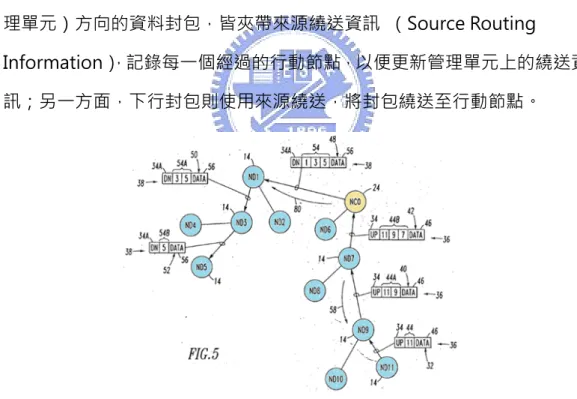
(21) 這類作法的優點如前所述,可以使用較短的路徑繞送封包,而且封包繞 送會有較多種路徑的選擇。但當行動節點進行漫遊時,由於其他行動節點的 路由表資訊不正確,封包會往原本的地方繞送,最後發現找不到該行動節點 時,便藉由整個網路的廣播,來修復繞送路徑。簡而言之,這類作法需要大 量訊息傳遞以維護存放於各個節點的路由表,同時交遞的延遲時間也會較 長,無法滿足某些即時性的應用。. 2.3.2.. 基於集中式路由表的繞送原則. 以集中式路由表為基礎的演算法便是將路由表集中在單一的網路實體 上,例如Dynamic Source Routing[1] [2] ,該方法其上行(行動節點往管 理單元)方向的資料封包,皆夾帶來源繞送資訊 (Source Routing Information) ,記錄每一個經過的行動節點,以便更新管理單元上的繞送資 訊;另一方面,下行封包則使用來源繞送,將封包繞送至行動節點。. Figure 2-4 Partial Source Routing. 此方法雖然不需要控制訊息(Control Message),然而由於資料傳輸 時須加上額外的表頭(Header) ,因此傳輸時產生的額外負擔很大。且由於 -8-.
(22) 沒有控制訊息,因此行動節點的移動或損壞造成連線中斷時,若沒有資料正 在傳輸,則無法即時的修復繞送路徑,造成後續資料暫時的遺失。. 2.3.3.. 基於坡度的繞送原則. 基於坡度的繞送原則。在過去的研究之中,某些方法如[4] [5] [6] 等。 其每個感測節點上維護到某個特定節點的累計cost,而每個行動節點繞送封 包到特定節點時,只要往累計cost較小的地方送去即可,而不需維護路由 表。這種作法會使得計算及傳輸的成本都相對減低,然而缺點是只能往少數 幾個事先設定好的特定節點繞送封包,如果臨時要往某個節點發送封包,則 沒有辦法做到,因此不一定適合每種應用環境。 例如前述的GRAd[4] (Figure 2-5) ,並無法處理由管理單元送到行動 節點的封包,這是由於所經過的中繼節點上,並沒有包含往其他行動節點的 資訊,而只有紀錄往管理單元的cost。因此,此類封包繞送原則無法處理下 行封包繞送。. Figure 2-5 GRAd. -9-.
(23) 2.3.4.. 基於可繞送識別碼的繞送原則. 這類的作法不需在每個行動節點上都存有路由表,只需要鄰近節點表格 即可,繞送時往往只依照某個特定的規則,例如前面提過的Zigbee [3] (Figure 2-1) ; 這類的繞送原則包含的方法,大多是利用父節點與子節點 間識別碼的關係,來推算出下一節點(Next Hop) ,例如Prime DHCP[9] 便 是以質數方式分配識別碼 (Figure 2-6). 1. 2. 3. Root proxy. 5. 7 …. 2x3 4. 6 …. 9. 15 … 25 … Æ starting from its largest prime factor. 18. 30. 2x3x3. 2x3x5. 42 … 2x3x7. Figure 2-6 Prime DHCP 該方法其父節點與子節點間,僅差一個質數因數,因此每個行動節點只 要依據目的地的識別碼,便可進行封包的繞送,而不需路由表。這類做法的 缺點,便是當一個行動感測節點要進行交遞的同時,以該節點為父節點的所 有無線行動感測節點,都必須同時獲取新的識別碼,因此繞送路徑修復所需 要的控制訊息較多,連線中斷的時間也會較長。同時,由於許多節點的識別 碼都被更換,因此許多原本的連線便會中斷,需要其他額外的控制訊息來告 - 10 -.
(24) 知其他節點識別碼與實體位址 (MAC Address)的對應關係。. 2.4. 單元總結 總結本節所述,在無線感測網路環境中,行動節點可能在任何時刻漫遊 至不同網路,因而造成一個或數個網路拓樸同時的改變。在使用傳統可繞送 識別碼分配機制(如ZigBee[3] 、Prime DHCP[9] )時,會造成許多行動節 點因為網路拓樸改變而需要重新分配識別碼,由於行動節點間識別彼此透過 識別碼,因此識別碼改變會使得原本的連線中斷。 然而若使用需要路由表(Routing Table)[7] [8] [10] 的繞送方式,雖 然當網路拓樸改變時,識別碼不需要更換,但由於繞送路徑的破壞,因此需 要重新修復繞送路徑。然而在傳統的繞送機制(如AODV、OLSR)當中, 修復繞送路徑或是定期地維護繞送路徑的正確性需要大量的控制訊息傳 遞,進而使整體網路的產出(throughput)下降;或是無法即時修復被破 壞的繞送路徑,造成一段期間內的封包無法被正確的送達。 因此,本篇論文考量目前實際應用的無線感測網路環境,提出一套適合 行動節點的行動性支援機制。此機制不但支援行動節點的移動性 (Roaming) ,使得行動節點在網路內部或不同網路間移動時,避免重新取 得新的識別碼,以造成連線中斷。而且也提供繞送路徑容錯(Fault tolerance)機制,當上層行動節點損壞或移動至其他地方時,行動節點可 立即修復繞送路徑,改由其他節點轉送封包。. - 11 -.
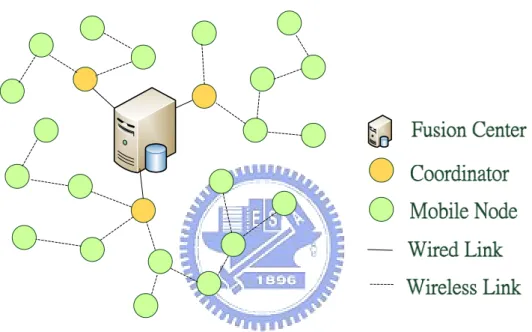
(25) 第三章 在無線感測網路中基於不對稱繞送之行 動性支援機制 3.1. 簡介 本章節中將使用實例,說明本篇論文所提出的在無線感測網路中基於不 對稱繞送之行動性支援機制 (Asymmetric Routing-based Mobility Supports for Sensor Networks, ARMs) ,其中包含一集中式的識別碼分配 機制、不對稱的繞送原則,說明了如何支援無線行動感測節點在各個網路漫 遊時所需的移動性 (Mobility) ,最後是如何提供無線行動感測節點損壞時 所需的繞送路徑容錯 (Fault Tolerance) 機制。情境說明如下: 在一個一般所謂的無線感測網路中 (Figure 3-1) ,通常可大致上分成 行動節點、閘道器及管理單元三個部分。 z 行動節點 (Mobile Node):可在此無線感測網路中任意變更位置 的網路實體,行動節點間可使用無線網路連結互相通訊。若再繼續 細分,其中一些行動節點可能會有繞送功能(Router) ,可以負責 轉送其它節點傳來的封包;而某些行動節點,就單純只有收集資料 的功能(End Device),無法轉送其他節點來的封包。 z 閘道器 (Coordinator) :為無線感測網路環境中用以連接行動節點 及管理單元的節點,或用以連接多重無線網路至共同的管理單元, 負責將行動節點收集來的資訊,傳遞到後端網路,或將後端網路來 的封包,轉送至無線感測網路中。網路中可有一個或多個閘道器利 - 12 -.
(26) 用有線或無線方式連接至管理單元。 z 管理單元 (Fusion Center) :由一個或多個網路實體所組成,並以 有線或無線方式連接至閘道器或行動感測節點,通常擁有較強大的 處理能力,負責分析處理由行動節點收集來的資料,同時也負責集 中管理一個或多個無線網路。. Figure 3-1 Sensor Network 而在上述的無線感測網路中,無線行動感測節點必須有識別碼分辨彼 此,且由於每個節點本身的無線傳輸範圍有限,因此需要一繞送演算法使得 彼此不鄰近的兩個行動節點能夠互相傳遞資訊,以及當行動節點漫遊或損壞 時,如何修復繞送路徑。下面幾個小節逐步的描述本篇論文中如何針對上述 三個方向提出解決方案。. - 13 -.
(27) 3.2. 基本概念 ARMs 包含了一種不限封包流向且不因網路拓樸改變而重新分配識別 碼的識別碼分配機制及繞送原則。ARMs 可以支援行動節點的移動性 (Roaming) ,當行動節點在網路內部或不同網路間移動時,不必重新取得 新的識別碼就可以收送封包,因此節點不會因為漫遊而造成連線中斷。在本 篇論文中每一個節點可取得一個唯一的識別碼,上行封包依據節點深度來繞 送,下行封包繞送則由一個共同管理單元協助,採用來源繞送的方式傳遞。 而且本機制也提供繞送路徑容錯(Fault tolerance)機制,當上層行動節點 損壞或移動至其他地方時,行動節點可立即修復繞送路徑,改由其他節點轉 送封包。同時,在此架構下,由於行動節點可在網路間自由移動而不必重新 取得新的識別碼,因此 ARMs 亦可支援各種負載平衡機制,例如以電量、 封包流量為考量,調整各個無線網路內行動節點的個數。 以下三個小節將分別詳細描述上面所提到的識別碼分配機制、繞送原則 以及容錯機制等。. 3.3. 識別碼分配方式 本篇論文所提出之行動節點識別碼分配方法中,行動節點平時必須偵測 附近節點的存在,並維護其鄰近節點表格(neighbor table) 。以Figure 3-2 中的節點(3)為例,當行動節點加入網路時,會在鄰近節點表格中選擇一 個深度(depth)較低且已加入網路的節點來做為他的父節點,並向父節點 發送位址分配要求 (Address allocation request,AAREQ) 訊息,向管 理單元要求一個唯一的識別碼,此識別碼用來讓行動節點間在網路中識別彼. - 14 -.
(28) 此,同時告知管理單元其硬體識別碼(MAC Address) ,中繼點(2) (9) 在收到訊息之後,會查詢自身所維護的鄰近節點表格(Neighbor Table), 並向深度較低的其他節點繞送該封包,並將自己的識別碼資訊放入該訊息 中。 管理單元在收到該訊息後,會隨機分配一個在此網路中唯一的識別碼給 行動節點,並在資料庫中維護一與實際網路相同的樹狀網路拓樸及硬體識別 碼與識別碼的對應關係,最後回覆位址分配回覆 (Address allocation response,AARESP)訊息給行動節點。由於管理單元維護了網路拓樸,因 此可利用來源繞送(source routing)的方式將位址分配回覆訊息繞送給行 動節點。 行動節點取得識別碼之後,會將其識別碼包含在訊標訊框(beacon frame)中,定期廣播告知鄰近節點其存在。. Figure 3-2 無線行動感測節點加入網路時取得識別碼 當行動節點第一次加入網路取得識別碼後,無論移動到網路何處,或是 - 15 -.
(29) 在不同網路間移動,只要能連接至同一管理單元,都不必再重新取得新的識 別碼。因此即使行動節點移動至不同頻道的無線感測網路,與該行動節點有 連線的其他節點,也不會因為識別碼改變,而使連線中斷。. 3.4. 繞送演算法 參考Figure 3-3,ARMs所提出之行動節點繞送原則中,網路中的每個 節點,都會定期發送訊標訊框(beacon frame)告知其存在,而訊標訊框 中,包含其識別碼及其距離管理單元的距離(depth)等資訊,且每個節點 都會動態維護一個表格,維護其鄰近節點的資訊,稱為鄰近節點表格 (neighbor table) 。當行動節點(3)欲往管理單元繞送封包時,會在鄰近 節點表格中,隨機選擇一距離管理單元最近的節點(2) ,並向該節點傳送資 料封包。 當中繼節點(intermediate node) (2) (9)收到資料封包之後,也依 照相同的方式繞送封包,因此資料封包最後會送達管理單元。 若目的地為管理單元,且管理單元已知來源(source)節點的硬體識 別碼(MAC Address)與識別碼(Identification)的對應關係,因此行動 節點(3)只需在其資料封包的標頭(header)部分,填入自己的識別碼, 以區分該筆資料所屬的行動節點。. - 16 -.
(30) Figure 3-3 上行封包繞送原則 參考Figure 3-4,當管理單元有資料封包欲傳送給行動節點(7)時, 由於管理單元知悉整個網路拓樸,因此可利用來源繞送(source route)的 方式,在資料封包的標頭部分,填入沿途必須經過的中繼節點的識別碼。中 繼節點收到資料封包時,可將自己的識別碼資訊除去,再轉送給下一個節 點,以減少頻寬的浪費。 由於中途經過的中繼節點都被管理單元所指定,因此資料封包所經過的 每個節點,都不需任何維護路由表(routing table),只需維護鄰近節點表 格即可。. - 17 -.
(31) Figure 3-4 下行封包繞送原則 參考Figure 3-5,當行動節點(3)從位置A移動到位置B時,由於行 動節點無法聯繫其父節點(2) ,行動節點(3)會傳送一控制訊息給管理單 元,更新管理單元到行動節點(3)的下行繞送路徑,然而管理單元的內部 網路拓樸是以樹狀結構儲存,因此行動節點(3)及其子樹中的節點,其下 行繞送路徑皆會被更新。接著行動節點 (3) 可藉由附近節點定期廣播的 訊標(beacon) ,選擇其他行動節點作為自己的父節點(7) ,由於上行封包 繞送的方式是以深度作為依據,因此若行動節點(3)的深度改變,則必須 對其子樹廣播控制訊息,更新子樹中所有行動節點的深度資訊,使得上行封 包繞送路徑可以被修復。因此ARMs可提供行動性支援,使得行動節點及其 子樹漫遊時連線不會中斷,同時由於管理單元知道網路的樹狀拓墣,因此可 以自然地支援行動節點的追蹤(Tracking),而不用需要額外的控制訊息。 關於控制訊息的種類及傳送的時機,會在下個小節詳細說明之。. Figure 3-5 行動節點漫遊時不需重新取得識別碼. 3.5. 容錯性支援 本小節接下來將描述 ARMs 如何提供行動節點損壞時所需的繞送路徑 - 18 -.
(32) 容錯機制。 如Figure 3-6所示,考慮行動節點(6)有資料必須往管理單元繞送, 當行動節點(5)損壞時,由於行動節點(6)的鄰近節點表格中仍有其他 距離管理單元較近的行動節點,因此行動節點(6)可任意選擇行動節點(1) (2)的其中一個,作為封包轉送的下一節點(next hop)。. Figure 3-6 繞送路徑容錯機制(上行) 參考Figure 3-7,由於ARMs考量計算複雜度及資訊更新的難易度,因 此管理單元在其內部維護的網路拓樸為一樹狀結構而非網狀結構,此樹狀結 構記錄了每個行動節點的從屬關係。換句話說,就是記錄到達每個行動節點 的單一路徑。當行動節點(6)有資料封包必須繞送到到管理單元時,由於 行動節點(6)的父節點(5)未預期的損壞,因此行動節點(6)除了立即 選擇其他鄰近節點繞送封包之外,也立即送出Binding Update訊息,並沿 途收集所經過行動節點的識別碼,通知管理單元變更網路拓樸結構,修復下 行繞送路徑。 若管理單元有資料封包欲繞送至行動節點(7)時,由於網路拓樸已經 被修復,因此可以透過(9)、 (1) 、(6) 、(7)這樣的路徑將封包送至行動 - 19 -.
(33) 節點(7) 。. Figure 3-7 繞送路徑修復機制(下行). 但有些情況下,不能由單一的訊息傳遞便修復繞送路徑,考慮Figure 3-8當中的行動節點(1)也損壞時,由於行動節點(6)附近沒有其他節點 距離管理單元較近,因此行動節點(6)除了發送Binding Update訊息之外, 也必須對其子樹廣播深度更新(Depth Update)訊息,告知其下的行動節 點,必須更新其深度資訊,維護上行繞送路徑。. Figure 3-8 繞送路徑修復機制(下行) 考慮Figure 3-9,在某些情況下,閘道器(9)可能被網路佈建人員關. - 20 -.
(34) 閉或移往他處,或者是遭遇不預期的損壞,此時行動節點(2)可利用某些 機制得知閘道器損壞,而這些機制不在本篇論文的討論範圍之內。由於行動 節點(2)發現其父節點已經損壞,卻又沒有其他鄰近節點可供繞送封包, 因此會向其所有子節點廣播(Broadcast),試圖找尋其他通往管理單元的 繞送路徑。 而當行動節點(4)收到來自父節點(2)發送的 Binding Update 訊息, 也會試圖去尋找可能的路徑,若附近有距離管理單元較近的節點,便會採用 點播(Unicast)的方式繞送 Binding Update 訊息,否則會繼續往其子樹 廣播此訊息。. Figure 3-9 繞送路徑修復機制(下行). 如Figure 3-10所示,若管理單元與一閘道器(10)連接,且收到行動 節點(2)送出的Binding Update訊息,會等待一段時間,試圖收集數個往 行動節點(2)的繞送路徑資訊,以便選擇較佳的繞送路徑。選擇路徑之後, 管理單元便更新內部的網路拓樸結構,此時下行繞送路徑便修復完成。接著 使用來源繞送(source route)回覆Binding Ack訊息給行動節點(2)。沿 途的行動節點在收到此訊息時,更新其深度資訊,若深度資訊有變,則對其 子樹廣播Depth Update訊息,使得沿途行動節點的上行繞送路徑都保持正. - 21 -.
(35) 確。. Figure 3-10 繞送路徑修復機制(下行) 由本小節所述的各種行動節點損壞情形,可說明在本篇論文所提出的分 配機制下,確實可達到繞送路徑容錯功能,使得行動節點損壞時,繞送路徑 可被快速的修復,上行封包能夠以最短路徑傳送至管理單元,且盡可能地延 長整體網路的存活時間(lifetime) 。. 3.6. 單元總結 總結本章節所述,ARMs 是一種不因網路拓樸改變而重新分配識別碼的 網路連結維護機制,而這個網路連結維護機制適用在無線網路環境中。此無 線網路環境通常包含下列幾個部分: z 行動節點:可在此無線網路中任意變更位置的網路實體,行動節點間 可使用無線網路連結互相通訊。 z 閘道器:無線網路環境中用以連接行動節點及管理單元的節點,或用 以連接多重無線網路至共同的管理單元,網路中可有一個或多個閘 道器。 - 22 -.
(36) z 管理單元:由一個或多個網路實體所組成,並以有線或無線方式連接 至閘道器,負責集中管理一個或多個無線網路。 在這樣的網路環境下,ARMs 提供了一個分配識別碼的方式,對應的封 包繞送原則,以及繞送路徑修復機制,使得行動節點能夠獲得行動性支援: z 識別碼分配方式:當行動節點第一次加入網路時,需要向管理單元取 得在網路中唯一的識別碼。而任何行動節點在網路中漫遊時,皆不 需要重新取得新的識別碼。 z 封包繞送原則:上行封包透過鄰近深度較低的行動節點,繞送到管理 單元;下行封包藉由管理單元所提供的資訊,利用來源繞送到達目 的行動節點。 z 繞送路徑修復機制:行動節點偵測到無法與父節點進行訊息交換時, 送出控制訊息到管理單元,更新管理單元內所維護的網路拓樸。 當行動節點加入網路時,首先利用上述的識別碼分配機制取得識別碼, 並使用封包繞送原則與網路內其他行動節點進行訊息交換,若繞送路徑損 壞,則使用上述的繞送路徑修復機制來維護繞送路徑。. - 23 -.
(37) 第四章 模擬實驗結果與討論 4.1. 簡介 本篇論文由於適用在無線行動感測網路中,因此最直接有效的方式,是 佈建許多無線感測節點,並在其上實作本篇論文所提出的演算法,測量其在 真實網路環境中實際的運作情形。 然而由於考量佈建時間與成本過於龐大,因此我們透過網路模擬器來模 擬本篇論文所提出的演算法,在真實網路環境中運作的情形。網路模擬具有 模擬時間少、成本低的優點,提供了學者來驗證自己提出的方法是否有效, 以及初學者可以驗證學習到的網路技術,這比真正的來建構一個網路環境, 還要容易方便的多[15] 。 因此我們採用功能強大,且頗具參考價值的NS2 [14] ,NS-2 最早來自 於 1989 年的Real Network Simulator, NS一直以來都在吸收全世界各地 研究者的成果,包括UCB、CMU等大學和SUN等公司的無線網絡方面的原 始碼。經過多年的發展之後,NS2 成為在學術研究上最具影響力及代表性 的網路模擬器。 NS2 由兩種程式設計語言,OTCL(具有物件導向特性的 TCL 腳本程式 設計語言)和 C++實作。之所以使用兩種程式設計語言,是因為模擬器有 兩方面的事情需要做。一方面,具體協定的模擬和實現,需要一種程式設計 語言,能夠高效率的處理位元組(Byte),標頭(Packet Header)等資訊, 能夠應用合適的演算法在大量的資料集合上進行操作。為了實現這個任務,. - 24 -.
(38) 程式內部模組的運行速度(run-time speed)是非常重要的,而運行模擬 環境的時間、尋找和修復 bug 的時間,重新編譯和運行的時間(run-around time)不是很重要。這種情況下,C++語言是非常合適的。 另一方面,許多網路中的研究工作都圍繞著網路組件和環境的具體參數 的設置和改變而進行的,需要在短時間內快速的開發和模擬出所需要的網路 環境(scenarios),並且方便修改和發現、修復程式中的Bug。 在這種任 務中,網路環境佈建的時間就顯得很重要了,因為模擬環境的建立和參數資 訊的配置只需要運行一次。這種情況下,腳本語言(script)有很大優勢, 具有物件導向特性的TCL腳本語言可以充分滿足需求[16] 。. 4.2. 模擬環境 本篇論文所使用的NS2 版本為 2.31 版,NS2 提供IEEE 802.15.4 的模 組,方便進行動感測節點MAC層及PHY層的模擬,但仍須作不少修改才能 符合本篇論文所提出之構想。無線訊號傳遞模型[17] 使用Two-Ray Ground,每個行動節點的無線訊號範圍大致上為 15 公尺。 第一個實驗環境如Figure 4-1所示,是在 100m x 100m的空間中,佈 建 50 個行動節點,其中 1 個行動節點,作為整個網路的管理單元(Fusion Center),還有1個做為將要進行交遞的觀察對象(Mobile Node) ,這兩 個行動節點布建在固定座標(75,75)與(25,25) ,而其他 48 個節點則在 每次進行模擬實驗前隨意散布。 然而為了避免某些行動節點成為孤島 (Isolated Nodes) ,無法加入網 路,或是整個網路環境被切割成不只一塊的現象(Network Partitioning)。 因此會在模擬實驗前過濾掉某些節點距離其他節點太遠的情形,確保管理單 - 25 -.
(39) 元及 MN 間至少有一條路徑可以繞送封包;在模擬實驗後,去除因孤島問 題或訊標訊框(Beacon)衝突而無法正確進行網路形成(Network Formation)階段的情形。. 100m. 100m. Figure 4-1 模擬環境 為了模擬交遞行為,會在網路趨於穩定之後一段時間,進行交遞。大約 在 40 秒的時間點,MN 會從座標(25,25)的地方,移動到(25,75)的位 置。同時,為了模擬群體行動節點交遞的行為,距離 MN 最近的 k 個節點, 也會跟 MN 以相同速度相同方向等速前進。MN 會在整個模擬過程中,與 管理單元進行 350 byte/s 的 CBR Traffic。 進行模擬實驗時,分別改變移動速度、同時移動節點數、資料流方向等,. - 26 -.
(40) 並對於不同繞送演算法逐一進行 160 次模擬實驗,分別記錄其控制訊息量、 交遞延遲時間等,再將記錄到的數據予以平均,並在下個小節列出比較結果。 各項環境及參數說明可參考Table 4-1。. Table 4-1 模擬參數 NS 2 版本. 2.32. MAC 層協定. IEEE 802.15.4 MAC. PHY 層協定. IEEE 802.15.4 PHY. L3 routing 協定. AODV/ARMs. 分布區域大小. 100m x 100m. 訊號傳輸最大距離. 15m. 節點個數. 50. Traffic. 350 bytes/s CBR. 重複實驗次數. 160. 模擬時間. 160s. 交遞時間點. 40s. - 27 -.
(41) 4.3. 實驗結果與分析 若針對行動節點群體一起移動時的行為進行模擬,並比較不同方法帶來 的影響,則可以發現,若群體大小不同時,對於交遞延遲、控制訊息量等, 都會有顯著的影響。 Figure 4-2中,橫坐標代表MN周圍k個行動節點一起移動,縱座標是控制 訊息數量。不難發現本篇論文所提出之方法(ARMs)其控制訊息量會比 AODV 少許多。推測是由於AODV在MN移動時會利用廣播訊息修復繞送路 徑;然而ARMs由於只需要由子樹的根節點發一單點傳播的控制訊息到管理 單元即可,因此所需的控制訊息較少。但由於模擬實驗時較難控制一起移動 的點要剛好形成一個子樹,因此移動群體較大時,仍然需要較多控制訊息, 但ARMs所使用的控制訊息量仍遠低於AODV。. Figure 4-2 同時移動節點數與控制訊息量的關係. - 28 -.
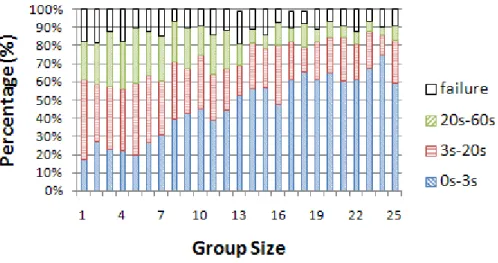
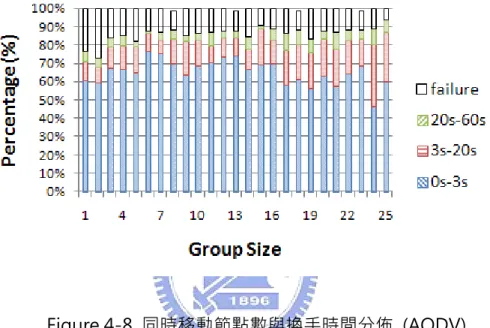
(42) Figure 4-3、Figure 4-4、Figure 4-5是交遞時間分佈,橫坐標是移動群體 的大小,縱座標是交遞成功佔總實驗次數的百分比。由圖中可以看到,ARMs 在 3 秒內換手成功的比率高達 90%,其中失敗的原因可能是MN 移動過 後,型成孤島,無法進行封包繞送,或是由於訊標訊框之間的碰撞,而無法 發現新的父節點可加入網路等;Zigbee則因為ID無法重新分配,而使得換 手成功機率降低許多;AODV當MN單獨移動時,交遞成功機率並不高,推 測是由於要由CN利用廣播訊息尋找MN,而廣播訊息有TTL的限制,因此要 找到MN有一定的難度,然而若多點一起移動,則只要找到其中一個點便可 修復繞送路徑,因此成功率會大幅提高。. Figure 4-3 同時移動節點數與換手時間分佈 (AODV). - 29 -.
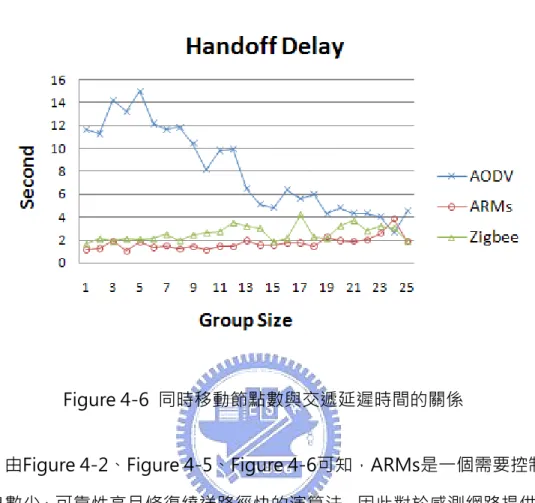
(43) Figure 4-4 同時移動節點數與換手時間分佈 (Zigbee). Figure 4-5 同時移動節點數與換手時間分佈 (ARMs) 然而參考Figure 4-6,當同時移動的節點變多時交遞所需的時間變化, 由圖中可以看出AODV所需的交遞時間差異相當大,且由於只從 80 次實驗 做平均,因此平均後的數據仍然不是很具有代表性。但從圖中略為可以看 出,AODV在移動群體較大時,所需的時間較少,可能是由於只要找到群體 中的其中一個行動節點,即可修復讓送路徑;然而ARMs在移動群體較大 - 30 -.
(44) 時,所需的時間則略為增加,推測是由於短時間內控制訊息較多,因此會造 成一些congestion delay。. Figure 4-6 同時移動節點數與交遞延遲時間的關係 由Figure 4-2、Figure 4-5、Figure 4-6可知,ARMs是一個需要控制 訊息數少、可靠性高且修復繞送路徑快的演算法,因此對於感測網路提供良 好的行動性支援。 而前述模擬實驗時的封包流,其方向是從管理單元流向MN,若改變 CBR Traffic的封包流向,換成由MN流向管理單元,重複前述的實驗,則結 果如Figure 4-7、Figure 4-8、Figure 4-9、Figure 4-10所示,ARMs的控 制訊息量及交遞時間相較於AODV、Zigbee相比幾乎是不相上下。這是由 於CBR Traffic流向管理單元,然而管理單元並沒有移動,路由表也只有少數 的行動節點需要更新,不需要廣播去找行動節點,因此控制訊息量不需要很 多,同時交遞成功率也相當高。. - 31 -.
(45) Figure 4-7 同時移動節點數與控制訊息量的關係. Figure 4-8 同時移動節點數與換手時間分佈 (AODV). - 32 -.
(46) Figure 4-9 同時移動節點數與換手時間分佈 (Zigbee). Figure 4-10 同時移動節點數與換手時間分佈 (ARMs) 而交遞延遲的情形則可由Figure 4-11看出,AODV的交遞延遲 與Figure 4-6相差不多,約在 1.5~2.0 秒之內,而ARMs則縮減至 1.5 秒, 這是因為在上個實驗中ARMs藉由父節點的訊標訊框(Beacon)來判斷是 否中斷連線;然而,在本次實驗中,可以藉由封包遺失的情形,較快速得來 判斷連線是否中斷,因此可以較快速的進行交遞。 - 33 -.
(47) Figure 4-11 同時移動節點數與交遞延遲時間的關係. 4.4. 單元總結 由模擬結果可以看出,ARMs 是一個需要控制訊息數少、可靠性高且修 復繞送路徑快的演算法,因此對於感測網路提供良好的行動性支援。但比較 的參數及比較對象仍然有待補強,例如 ARMs 與重新取得識別碼的演算法 比較、ARMs 適合多大規模的網路環境或是封包流向不同的比例對於 ARMs 有什麼樣的影響等。. - 34 -.
(48) 第五章 結論與未來工作 5.1. 結論 ARMs 所提出的識別碼的分配機制當中,當行動節點加入網路時,即向 管理單元取得識別碼。網路中每個節點都記錄相對於管理單元的深度,使得 整個網路由內而外的形成以管理單元為中心的坡度(Gradient),當行動節 點有資料欲傳送給管理單元時,可向鄰近節點表格(neighbor table)中深 度(depth)較低的任何一個行動節點傳送封包,亦即往距離管理單元較近 的行動節點繞送封包。當網路後端有資料欲透過管理單元傳送給行動節點 時,管理單元採用來源繞送(source routing)的方式將封包繞送給行動節 點。 ARMs 提供行動節點在漫遊時快速產生繞送路徑到特定閘道器 (Gateway),在此架構下,亦可應用各種不同的機制,使得此網路架構具 有負載平衡(Load Balance)及容錯(Fault Tolerance)等特性。然而在 此機制中,會對下行繞送封包產生較長的標頭(Header) ,造成較多額外負 擔(overhead) ,因此本篇論文適用在上行封包流量較多、下行封包流量較 少的無線網路環境。總而言之,ARMs 具有以下特色: z 具有彈性的網路拓樸:由於在此架構中,行動節點加入網路時,不會 有 Zigbee 網路中可能無法取得識別碼的問題,因此若每個行動節 點選擇深度較低的節點做為自己的父節點,則可以保證每個節點與. - 35 -.
(49) 管理單元間跳躍數(Hop Count)為最少。 z 行動性支援: 行動節點可在不同的網路間移動,即使是移動到不同 頻道的網路下,因為識別碼不變,因此亦可透過集中的管理單元來 找到該行動節點,同時,原本依附在該行動節點下的其他行動節 點,也不會因而中斷連線。另外由於管理單元維護了網路拓樸,因 此 ARMs 也具有追蹤(Tracking)行動節點位置的功能。 z 容錯性:ARMs 在行動節點損壞的時候,on demand 的發出少量控 制訊息,同時可以快速的回復繞送路徑。 z 附載平衡:ARMs 提供了可以實作附載平衡機制的架構,在此架構 下,由於行動節點可以在不同網路間漫遊且不需要取得新的識別 碼,因此可以自由的根據所實作的演算法,例如以電量、封包流量 為考量,調整各個無線感測網路內行動節點的個數。動態調整網路 拓樸,使得閘道器的負載不至於過重。. 5.2. 未來工作 由於ARMs最大的缺點就是下行封包的額外負擔較大,因此希望能夠有 其他方法降低下行封包的標頭長度。例如Loose Source Routing[12] 等。 未來將會試圖解決或減少下行封包的額外負擔,以及減少節點間 (Point-to-Point)的繞送距離(hop count) 。 另外,由於所有封包都流經管理單元,因此在網路規模太大的時候,鄰 近閘道器的幾個節點便會成為整個網路的瓶頸,限制了整體網路的大小。同 時,鄰近閘道器的這幾個節點由於必須轉送大部份的封包,因此電量也較快. - 36 -.
(50) 耗盡,使得網路整體壽命減短,稱為熱點問題 (HotSpot Problem)[13] 。 這個問題在本篇論文中並沒有被討論,同時本篇論文所提出的方法亦沒有針 對這個問題,提出有效的解決方案,因此這個問題可以是未來研究的一個方 向。 最後,由於 ARMs 使用的環境必須具備適當的網路特性,而其他網路 環境不見得適用本篇論文所提出的方法,例如下行封包較多,或是每個行動 節點無線訊號所能涵蓋的範圍不同等。未來的研究方向可以針對不同網路特 性提出行動性支援機制,或是設計出其他行動性支援機制可適用於一般的無 線隨意網路等。. - 37 -.
(51) 參考文獻 [1]. Gutierrez, Jose A., Pereira, Luis R., “Source routing protocol for an ad-hoc. communication. network”,. EUROPEAN. PATENT. APPLICATION EP1480387A1, April 26, 2004. [2]. Cedell Adam Alexander, Russell Eugene Gardo, Brahmanand Kumar Gorti, Olen Lee Stokes, “Method and system within a computer network for maintaining source-route information at a router bypassed by shortcut communication”, United States Patent US6452921 B1, September 17, 2002.. [3]. ZigBee specification version 1.0.. [4]. R.D.. Poor,. “Gradient. Routing. in. Ad. Hoc. Networks,”. www.media.mit.edu/pia/Research/ESP/texts/poorieeepaper.pdf, 2000. [5]. [6]. [7]. Fan Ye; Zhong, G.; Songwu Lu; Lixia Zhang, "PEAS: a robust energy conserving protocol for long-lived sensor networks," Network Protocols, 2002. Proceedings. 10th IEEE International Conference on , vol., no., pp. 200-201, 12-15 Nov. 2002 D. Braginsky and D. Estrin“Rumor Routing Algorithm For Sensor Networks” International Conference on Distributed Computing Systems (ICDCS-22) November 2001.. Perkins, C.E.; Royer, E.M., "Ad-hoc on-demand distance vector routing," Mobile Computing Systems and Applications, 1999. Proceedings. WMCSA '99. Second IEEE Workshop on , vol., no., pp.90-100, 25-26 Feb 1999.. [8]. Jacquet, P.; Muhlethaler, P.; Clausen, T.; Laouiti, A.; Qayyum, A.; Viennot, - 38 -.
(52) L., "Optimized link state routing protocol for ad hoc networks," Multi Topic Conference, 2001. IEEE INMIC 2001. Technology for the 21st Century. Proceedings. IEEE International , vol., no., pp. 62-68, 2001 [9] Yuan-Ying Hsu; Chien-Chao Tseng, "Prime DHCP: a prime numbering address allocation mechanism for MANETs," Communications Letters, IEEE , vol.9, no.8, pp. 712-714, Aug 2005. [10] Wu Shaochuan; Tan Xuezhi; Jia Shilou, "AOHR: AODV and OLSR Hybrid Routing Protocol for Mobile Ad Hoc Networks," Communications, Circuits and Systems Proceedings, 2006 International Conference on , vol.3, no., pp.1487-1491, 25-28 June 2006 [11] Weniger, K.; Zitterbart, M., "Mobile ad hoc networks - current approaches and future directions," Network, IEEE , vol.18, no.4, pp. 6-11, July-Aug. 2004 [12] D. B. Johnson, "Mobile Host Internetworking Using IP Loose Source Routing," Tech. Rep. CMU-CS-93-128, School of Comp. Sci., Carnegie Mellon Univ., Pittsburgh, PA, Feb. 1993.. [13] S.K. Das, S.K. Sen, R. Jayaram, Novel load balancing scheme for the. tele-traffic hot spot problem in cellular network, ACM/Baltzer Wireless Networks (WINET) 4 (1998) 325–340. [14] The Network Simulator - ns-2, http://www.isi.edu/nsnam/ns/ [15] NS2簡介與安裝, http://blog.pixnet.net/NS2lab/post/5645626 [16] 網路類比環境 NS-2模擬軟體簡介, http://net.zdnet.com.cn/network_security_zone/2007/0918/511555.shtml [17] Wikipedia, Radio propagation model. - 39 -.
(53)
數據
+3
相關文件
Firstly, I analysis and discuss between the subsidy differentiation and routing choices when the public and private transport firms could choose concurrently the
This project integrates class storage, order batching and routing to do the best planning, and try to compare the performance of routing policy of the Particle Swarm
Therefore, the purpose of this study is to propose a model, named as the Interhub Heterogeneous Fleet Routing Problem (IHFRP), to deal with the route design
This paper formulates the above situation to the Multi-temperature Refrigerated Container Vehicle Routing Problem (MRCVRP), and proposes a two-stage heuristic which consists of
Abstract: This paper presents a meta-heuristic, which is based on the Threshold Accepting combined with modified Nearest Neighbor and Exchange procedures, to solve the Vehicle
Compared with the combination of our IO assignment, the single-layer BGA global router[1] and our detailed routing phase, our RDL router reduces the global wirelength by 15.9%
[20] Mohamed Younis, Moustafa Youssef, and Khaled Arisha “Energy Aware Routing in Cluster-Based Sensor Networks”, 10th IEEE International Symposium on Modeling, Analysis
Wong “Optimal layer assignment for escape routing of buses ” International Conference on Computer- Aided Design, pp.245-248, 2009. Chen “New optimal layer assignment for
