Received : Jan. 9, 2006 ©2006 National Kaohsiung University of Applied Sciences, ISSN 1813-3851 Accepted : Feb. 13, 2006
E-mail : [email protected]
摘 要
本論文主要在探討石化廠電力系統在正常及故障運轉的動態特性。研究對象為一個簡化 的大型石化廠電力系統,該系統組件包括汽輪機與調速系統、同步發電機與激磁系統、三相 變壓器、以及靜態負載等。研究方法為先推導系統組件的數學模型,接著利用 SIMULINK 與 SimPowerSystems 開發模組,然後將這些模組依系統架構連接,最後進行動態特性模擬。模 擬結果顯示,在這些運轉模式下,該系統的動態特性都是可以接受的,亦即模擬結果與預期 一致,並且可推論的,應可和實際運轉情形一致。本研究最大的價值是可以做為石化廠電力 系統規劃、運轉、以及擴充的重要參考。 關鍵詞:石化廠電力系統、汽輪機、同步發電機、SIMULINK。1. 前 言
台灣地區天然資源貧乏,僅有少數的煤、天然氣、水力、和風力,98%以上的能源都要 仰賴進口,所以能源的節約和能源有效運用都是台灣相當重視的。近年來,台灣經濟快速發 展,國內用電量大幅成長,尤其夏季尖峰負載會導致台電的發電量不足而造成限電危機。在 台灣的電力需求中以工業用電比例最高,佔總用電量的 50%以上。 在所有的發電方式中,應屬汽電共生方式的效率最高,可達到 80%以上,遠高於傳統火 力電廠的 30~40%。在產業界中,許多在製程都需要大量蒸汽,採用汽電共生方式是不僅可以 有效利用蒸汽的能量,也可以發電來降低購電成本,在某些情形下如風災等更可以供應廠內 所需的部份電力。石化廠的發電系統是很典型的汽電其生發電系統。汽電共生的基本架構是 利用燃燒石化原料去加熱蒸汽鍋爐,而產生高壓蒸氣去推動汽輪機去帶動發電機發電,把發 電後的中低壓蒸氣送出到製程使用,達到最高的能源效率。在汽電共生發電系統可分為先發電循環、後發電循環、以及複循環等三種[1]。 有關汽輪發電系統的研究雖然很多,但對於系統動態特性分析的研究並不多。IEEE 提出 了典型調速機和汽輪機的近似模型[2]。Demello 補充了鍋爐以及鍋爐控制的模型,使得整模 型更詳細[3]。Dent 提出了微調速機的架構,取代了大型汽輪機的調速控制,並且詳細的比較 這兩種系統的優缺點[4]。Schaefer 等人介紹了一種現代化的激磁系統[5]。Kehler、Bize、 Kunitomi、Inoue 等人探討了汽輪機頻率調整與控制的問題[6~9]。Chen、Hsu 等人探討了石化 廠電力系統中保護協調裝置以及大型同步馬達啟動時對汽輪發電系統的影響[10~11]。 本論文主要目的是研究大型石化廠電力系統在正常及故障情形下的動態分析。研究對象 為一個簡化的實際系統,該系統主要包括八套汽輪發電機機組、十一台變壓器、以及七個集 總負載。本研究最大的價值是可以做為石化廠電力系統規劃、運轉、以及擴充的重要參考。
2. 石化廠電力系統
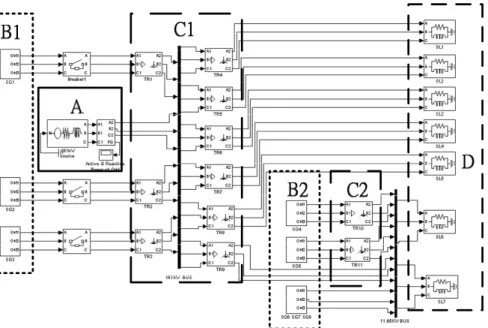
2.1 系統架構 圖 1 為本研究所使用的簡化石化廠電力系統架構。此系統的組件包括八套汽輪發電機機 組-2 套 125MVA、1 套 60MVA、5 套 12.5MVA,十一台三相變壓器-3 台 11.95kV/161kV、 3 台 161KV/11.95kV、3 台 161KV/3.45kV、2 台 3.45kV/11.95kV,七個靜態負載。圖 1 工業型電力系統架構圖
2.2 汽輪原動機模型
[XC]=[X1,X2,X3,X4,X5]T (2) [UC]=[Δω,P1L, , , ]0 0 0 T (3) [ ] 1 1 C 3 K 0 0 0 0 T 0 0 0 0 0 B 1 0 0 0 0 T 0 0 0 0 0 0 0 0 0 0 ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (4) [ ] 1 2 2 2 C 3 4 4 5 5 1 0 0 0 0 T K 1 0 0 0 T T 1 0 0 0 0 A T 1 1 0 0 0 T T 1 1 0 0 0 T T − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − ⎥ ⎢ ⎥ ⎣ ⎦ (5) 上列式子中,[Xc]為狀態變數矩陣,[Ac]、[Bc]為參數矩陣,[Uc]為輸入矩陣,p 為微分運算子 [12]。 2.3 同步發電機模型 參考到轉子軸後,三相同步發電機的數學模型轉換為 d-q 軸可表示成
qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i ω ω ω ω ω − − − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ − − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (6)
上式中 vds、ids為 d 軸定子電壓及電流,vqs、iqs為 q 軸定子電壓及電流,vkq、ikq為 q 軸阻尼
繞組電壓及電流,vfd、vkd、ifd、ikd為激磁電壓、d 軸阻尼繞組電壓、激磁電流、d 軸阻尼繞 組電流,rs、rfd、rkd、rkq為定子電阻、激磁繞組電阻、d 軸阻尼繞組電阻、q 軸阻尼繞組電阻, Ld、Lq、Lfd、Lkd、Lkq為 d 軸電感、q 軸電感、激磁繞組電感、d 軸阻尼繞組電感、q 軸阻尼 繞組電感,Lmd、Lmq為 d 軸互感、q 軸互感,p 為微分運算子[13-14]。 3 1 1 sT + 1 4 1 sT + 1 5 1 sT + 3 K K4 K5 ω Δ m Ρ 2 2 1 K sT + 1 1 1 K sT + r ω 圖 2 汽輪原動機方塊圖 2.4 激磁系統模型 圖 3 為 IEEE Type I 激磁控制系統方塊圖。激磁系統的基本原理是藉由同步發電機端電壓 回授訊號經自動電壓調整器(Automatic Voltage Regulator, AVR)來改變激磁電壓,達到控制 同步發電機端電壓的目的[15-18]。
圖 3 IEEE Type I 激磁控制系統方塊圖 此系統的狀態方程式可表示成 [ C] [ C][ C] [ C][ C] p X = A X + B U (7) 其中 [XC]=[X1,X2,X3,X4]T (8) 2 2 [UC]=[V VS, REF,X L,X L]T (9) [BC]=Diag 1 T K[ / R, A/T 1 T KA, / E, F /(T TE F)] (10)
[ ]
(
)
(
)
R A A A A C E E E F E E E F F 1 0 0 0 T K 1 K 0 T T T A K S 0 0 0 T K K S 1 0 0 T T T − ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ − − − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + − ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (11) 上列式子中,[Xc]為狀態變數矩陣,[Ac]、[Bc]為參數矩陣,[Uc]為輸入矩陣,p 為微分運算子。 2.5 三相變壓器模型 變壓器的主要目的是在相同頻率下,將能量從一個電壓、電流準位轉換至另一個電壓、 電流準位。三相變壓器的電壓方程式可表示成q1 1 11 m q1 d 1 1 11 m d 1 q 2 m 2 22 q 2 d 2 m 2 22 d 2 v r pL 0 pL 0 i v 0 r pL 0 pL i v pL 0 r pL 0 i v 0 pL 0 r pL i + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (12)
其中 vd1、id1是 d 軸一次側電壓及電流,vq1、iq1是 q 軸一次側電壓及電流,vd2、id2是 d 軸二
次側電壓及電流,vq2、iq2是 q 軸二次側電壓及電流,r1、r2是一次側電阻及二次側電阻,L11、 L22是一次側自感及二次側自感,Lm是磁化電感,p 是微分運算子。 2.6 靜態負載模型 集總的靜態負載可考慮成包含電阻性和電感性負載,其電壓方程式可表示成 0 0 qk sk sk qk dk sk sk dk v r pL i v r pL i + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ = ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (13) 其中 vdk、idk是 d 軸電壓及電流,vqk、iqk是 q 軸電壓及電流,rsk、Lsk是電阻及電感,p 是微 分運算子。
3. 石化廠電力系統動態模擬
3.1 正常運轉模擬 3.1.1 SimPowerSystems 模組架構 圖 4 為正常運轉模擬所使用的 SimPowerSystems 模組架構,主要包括四部份-A 部分 為無限匯流排,B 部分為汽輪原動機、同步發電機與激磁系統,C 部分為三相變壓器,D 部分為負載。 3.1.2 模擬順序 圖 5 為正常運轉模擬時序圖。 3.1.3 模擬結果 圖 6.1~6.4 為系統變數變動的情形,所有的變數都以個別組件容量為標么基底表示。由 模擬結果可看出,當系統組件依序加入時,發電機的端電壓、電流、激磁電壓、機械功率、 轉速、實功率、以及虛功率都會有程度不同的暫態產生,暫態大小及持續的時間與組件的 容量以及參數有關。圖 4 正常運轉模擬模擬 SimPowerSystems 模組架構
SG1 A 相電流 SG1 激磁電壓
SG1 輸入功率 SG1 端電壓
SG1 轉速 SG1 輸出 P 及 Q
SG1 電磁功率 SG2 A 相電流
SG2 輸入功率 SG2 端電壓 SG2 轉速 SG2 輸出 P 及 Q SG2 電磁功率 SG4 A 相電流 SG2 激磁電壓 SG4 輸入功率 圖 6.2 正常運轉模擬系統變數變動情形
SG4 轉速 SG4 輸出 P 及 Q
SG4 電磁功率 SG6 A 相電流
SG4 激磁電壓 SG6 輸入功率
SG4 端電壓 SG6 轉速
SG6 電磁功率 無限匯流排 A 相電流
SG6 激磁電壓 無限匯流排 P 及 Q
SG6 端電壓 11.95kV 匯流排電壓
SG6 P 及 Q 161kV 匯流排電壓
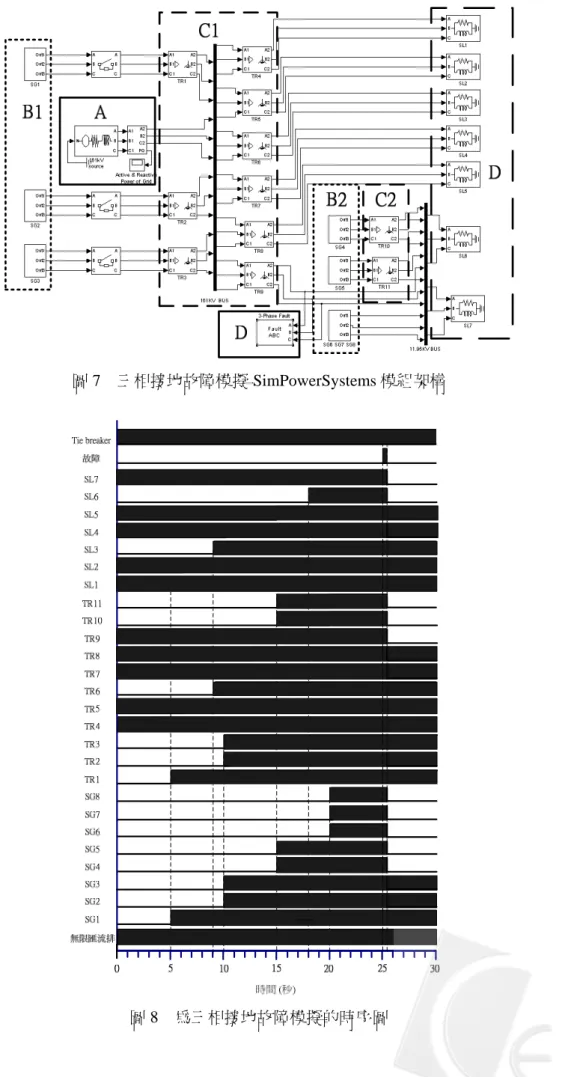
3.2 三相接地故障模擬 3.2.1 SimPowerSystems 模組架構 圖 7 為三相接地故障模擬所使用的 SimPowerSystems 模組架構,主要包括五部分-A 部分為無限匯流排,B 部分為汽輪原動機、同步發電機與激磁系統,C 部分為三相變壓器, D 部分為負載,E 部分為故障控制模組。 3.2.2 模擬順序 圖 8 為三相接地故障模擬的時序圖。由圖中可看出系統組件加入及切離的時間序,在 25 秒時 11.95kV 匯流排發生三相接地故障,25.2 秒故障排除,總模擬時間為 30 秒。 3.2.3 模擬結果 圖 9.1~9.4 為三相接地故障模擬系統變數變動情形顯示。所有的變數都以個別組件容量 為標么基底表示。模擬結果顯示,系統發生故障前的情形與正常運轉模擬相似。發電機的 端電壓、電流、激磁電壓、機械功率、轉速、實功率、以及虛功率都會有程度不同的暫態 產生,暫態大小及持續的時間與組件的容量以及參數有關。故障排除後,部份組件從系統 切離,系統變數也回歸到 0。此外,由於此時僅由無限匯流排及 SG1~SG3 供應功率,使得 SG1~SG3 的系統變數要經過一些時間才會趨於穩定。 3.3 評 論 模擬結果顯示,此系統在正常及三相接地故障情形下的動態特性都是可以接受的。然而, 在實際的運轉中,系統組件加入的情形不一定會如此緊湊,因此系統響應可能會較緩和。此 外,由於短路故障模擬的觀察重點在於故障發生所造成的暫態現象以及故障排除後的行為, 所以故障時間設定為 0.2 秒。在實際的系統運轉中,故障持續時間會因保護電驛的設定而不 同,系統組件的切離會因保護協調的安排而不同,故障造成的影響也會因故障時間點、接地 阻抗、以及系統組件參數而不同。
4.結 論
本研究主要在探討石化廠電力系統在正常運轉及三相接地故障情況下的動態特性。研究 方法為先推導系統組件的數學模型,接著利用 SIMULINK 與 SimPowerSystems 開發模組,然 後將這些模組依系統架構連接,最後進行動態特性模擬。模擬結果顯示,在這兩種運轉模式 下,系統的動態特性都是可以接受的。本研究最大的價值是可以做為石化廠電力系統規劃、 運轉、以及擴充的重要參考。圖 7 三相接地故障模擬 SimPowerSystems 模組架構
SG1 A 相電流 SG1 激磁電壓
SG1 輸入功率 SG1 端電壓
SG1 轉速 SG1 P 及 Q
SG1 電磁功率 SG2 A 相電流
SG2 輸入功率 SG2 端電壓
SG2 轉速 SG2 P 及 Q
SG2 電磁功率 SG4 A 相電流
SG2 激磁電壓 SG4 輸入功率
SG4 轉速 SG4 P 及 Q
SG4 電磁功率 SG6 A 相電流
SG4 激磁電壓 SG6 輸入功率
SG4 端電壓 SG6 轉速
SG6 電磁功率 無限匯流排 A 相電流
SG6 激磁電壓 無限匯流排 P 及 Q
SG6 端電壓 161KV 匯流排電壓
SG6 P 及 Q 11.95KV 匯流排電壓
參考文獻
[1] 陳文能, “汽電共生系統實務上”, 電機月刊, 36 期, 民國 82 年 12 月, pp 95-107.
[2] IEEE Committee Report, “Dynamic Models for Steam and Hydro Turbines in Power System Studies,” IEEE Transactions on Power Apparatus and Systems, Vol. 92, No. 6, Nov./Dec.,1973, pp 1904-1915.
[3] de Mello, F. P., “Dynamic Models for Fossil Fueled Steam Units In Power System Studies,”
IEEE Transactions on Power System, Vol. 6, No. 2, pp 753-761.
[4] Dent, F. G., “Microgovernor-a Replacement for Existing Large Steam Turbine Governing Controls,” International Conference on Refurbishment of Power Station Electrical Plant, 1998, No. 7-8, 1988, pp 128-132.
[5] Schaefer, R. C., “Steam Turbine Generator Excitation System Modernization,” IEEE Pulp and
Paper Industry Technical Conference, June 1995, pp 194-204.
[6] Kehler, J. H, “Frequency Regulation From Steam Turbine Generators,” IEEE Power
Engineering Society Winter Meeting, Vol. 1, 1999, pp 775-776.
[7] Bize, L. N. and J. D. Hurley, “Frequency Control Consideration for Modern Steam and Combustion Turbines,” IEEE Power Engineering Society Winter Meeting, Vol. 1, 1999, pp 548-553.
[8] Kunitomi, K., A. Kurita, Y. Tada, S. Ihara, W. Price, L. M. Richardson, and G. Smith, “Modeling Combined-- Cycle Power Plant for Simulation of Frequency Excursions,” IEEE
Transactions on Power Systems, Vol. 18, Issue 2, May 2003, pp 724-729.
[9] Inoue, T., H. Taniguchi, and Y. Ikeguchi, “A Model of Fossil Fueled Plant with Once-Through Boiler for Power System Frequency Simulation Studies,” IEEE Transactions on Power
Systems, Vol. 15, Issue 4, Nov. 2000, pp 1322-1328.
[10] Chen, C.-S., Y.-L. Ke, and C.-T. Hsu, “Protective Relay Setting of the Tie Line Tripping and Load Shedding for the Industrial Power System,” IEEE Transactions on Industry Applications, Vol. 36, Issue 5, 2000, pp 1226-1234
[11] Hsu, C. T., “Transient Stability Study of the Large Synchronous Motors Starting and Operating for the Isolated Integrated Steel-Making Facility,” IEEE Transactions on Industry Applications, Vol. 39, No. 5, Sep/Oct 2003.
[12] Smith, J. R. and M.-J. Chen, Three-Phase Electrical Machine Systems, Research Studies Press Ltd., England, 1993.
[13] Krause, P. C., Analysis of electric machinery and Drive System, 2nd Ed, McGraw-Hill Book Co., Dec 2001.
[14] Ong, C.-M., Dynamic Simulation of Electric Machinery Using Matlab/Simulink, McGRAW-HILL Book Co., 1998.
[15] IEEE Guide for Identification, Testing and Evaluation of the Dynamic Performance of Excitation Control Systems, ANSI/IEEE Std. 421A-1978, June 1978.

![圖 3 IEEE Type I 激磁控制系統方塊圖 此系統的狀態方程式可表示成 [ C ] [ C ][ C ] [ C ][ C ]p X=AX+BU (7) 其中 [ X C ] = [ X 1 , X 2 , X 3 , X 4 ] T (8) 2 2[UC]=[V VS,REF,XL,X L ] T (9) [ B C ] = Diag 1 T K[ /R, A / T 1 T KA, /E, F /( T TE F )] (10) [ ] ( ) ( )RAAA ACE](https://thumb-ap.123doks.com/thumbv2/9libinfo/8829379.234823/5.892.99.770.104.1063/系統方此系統的表示CC其中X=XXXXTT=DiagTTT.webp)