國
立
交
通
大
學
電機與控制工程學系
博 士 論 文
參數空間法用於擾動控制系統之分析與設計
Analysis and Design of Perturbed Control Systems Based on
Parameter Space Method
研 究 生:秦弘毅
指導教授:吳炳飛 博士
參數空間法用於擾動控制系統之分析與設計
Analysis and Design of Perturbed Control Systems Based on Parameter
Space Method
研 究 生:秦弘毅 Student:Hung-I Chin
指導教授:吳炳飛 博士 Advisor:Dr. Bing-Fei Wu
國 立 交 通 大 學
電 機 與 控 制 工 程 學 系
博 士 論 文
A DissertationSubmitted to Department of Electrical and Control Engineering College of Electrical Engineering and Computer Science
National Chiao Tung University In Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Electrical and Control Engineering
June 2005
參數空間法用於擾動控制系統之分析與設計
研究生:秦弘毅 指導教授
:吳炳飛 博士
國立交通大學電機與控制工程學系
摘
要
在實體系統中使用的模型通常是不準確的。在運作期間,系統中
的參數常隨著時間和環境的變化而改變,或者由於使用之模型為簡化
的模型,凡此種種原因皆可導致誤差的產生,所以針對特定準確的系
統而進行之分析及設計是不完全實用的。在實際控制系統設計及分析
時,穩健的系統穩定性,是重要的考慮因素。由於系統中非線性元件
的存在,另一個必須考慮的重要現象為極限環的產生,而通常這是設
計者不希望見到的,此類問題已經被許多的研究者討論過。對帶有非
線性性質的擾動系統而言,如果能夠事先預測其極限環的行為,對設
計者是極有助益的。利用描述函數法將非線性元件線性化,以預測其
極限環的發生,已成功的使用在許多的應用上。
本論文旨在針對具有擾動參數的控制系統,提出一完整且有效之
方法,利用參數空間法及穩定性的基本觀念,以分析其增益邊際和相
位邊際,並且設計控制器,調整控制器的係數,以達到系統頻域的規
格要求,例如增益邊際、相位邊際和敏感度。同時對有非線性元件的
系統,預測其極限環的發生。車輛模型被使用為模擬的例子。藉著求
解系統之特性方程式,在選定之系統參數平面或空間上,產生增益及
相位邊界曲線,以圖解方式決定控制器係數的合格區域,以使整個系
統之性能達到頻域規格的要求,以此法進行分析及設計。同樣的方法
也應用於模糊控制系統穩定度的分析。以上提出之方法更進一步延伸
至具有擾動參數的鎖相迴路系統的設計分析。部分系統參數在給定區
域擾動,於參數平面上,以圖形顯示待決之目標參數區域,選定該區
域範圍內之參數,使該鎖相迴路系統能達到規格之要求。本論文模擬
的結果已驗証了預期達成之目標。
Analysis and Design of Perturbed Control Systems Based on
Parameter Space Method
Student:Hung-I Chin Advisor:Dr. Bing-Fei Wu
Department of Electrical and Control Engineering
National Chiao Tung University
ABSTRACT
The models used are usually imprecise and the parameters of physical
systems vary with the operating conditions and time. Designing and
implementing a system for a fixed and exact control plant is not usually
practical in the natural environments. A inaccurate plant may result from a
simplified model and uncertainties in system parameters can always occur
in the physical world. Robustness stability is important in analysis and
design of practical control systems. Another important phenomena to be
considered is undesirable oscillations due to nonlinearities in a feedback
closed system and it has been studied by many researchers. It is very
instructive for the designer to predict the limit cycle behavior of a
perturbed control system with nonlinearities. The describing function
technique is mainly employed to predict the existence of constant
amplitude oscillations of closed nonlinear systems and has been
successfully used in many applications.
The main subject of this dissertation is to propose a novel method
based on parameter space method and robust stability criteria to predict
limit cycles occurred, analyze the system performances of gain margin and
phase margin (GM and PM), and design a desired controller by adjusting
the controller coefficients for perturbed control systems to meet specified
conditions including GM, PM and sensitivity in frequency domain. A
vehicle model is used as an example for simulation. With the help of gain
and phase boundary curves resulting from the roots of the characteristic
polynomial equation of closed control systems, a methodology is proposed
for portraying regions in a selected designed parameter plane so that the
performance of the whole system can meet the specified requirements with
perturbed parameters varying in given intervals. The same approach is
extended to analyze the robust stability for a fuzzy control system. This
dissertation also applies the above method on phase-locked loops (PLL)
design by frequency domain approach for a perturbed PLL system. The
desired system parameters of PLLs in the selected coordinate plane are
determined in graphical portrayals. Simulation results have demonstrated
and achieved the objectives as desired.
誌謝
這一路走來,有太多我需要感謝的人!
尤其是我的論文指導教授 吳炳飛老師。
在此我要由衷的向您和師母的關心表示十二萬分的謝意和敬意。
由於您的鼎力協助、指導研究,並給予不斷的鼓勵,尤其遭遇挫折的
時候,才使我越挫越能堅持。
特別感謝口試委員 鄧清政教授、張志永教授、林志民教授、鍾俊
業教授、黃英哲教授,在百忙之中,願意撥冗參與口試,不吝給予鞭策
和指導。
在研究過程中,彭昭暐博士經常給予協助和提供諸多建議,給予
研究上極大的助益,多年來彭博士及淑美賢伉儷所展現的友誼關懷,
尤其令我銘感五內,永誌難忘。
感謝 CSSP 實驗室的學弟妹們多年來提供的協助,您們的友情,給
了我一切。您們的勤奮和努力,使也我印象深刻,值得向年輕的各位
再學習,尤其是立山、世孟。
多年來,內人 素瑩體諒我就讀研究所博士班,課業繁重,協助我
照料家庭及子女,免除後顧之憂,使我能潛心向學,最值得我感謝。
希望在未來人生旅途上,能以實際行動,回報一二。也謝謝小兒 國鈞
及小女 瑋苓的加油、鼓勵,給予我無比的勇氣。
有所遺憾的是博士班就讀期間,父親、母親相繼辭世,使我未能
多盡人子孝道,回饋養育恩情,謹於此,表達對我的父親 秦瓊樹先生、
母親 秦黃含笑女士感恩及紀念之意。
「天行健,君子以自強不息」,人生就是不斷的學習過程。雖已
年過半百,仍滿懷信心,願盡一己棉薄之力,將所學所知,進行對照,
服務社會,希望有所助益。
再一次,恭謹的向所有關心、支持及協助我的人,表達最誠摯的
謝意。
弘毅 於交大 CSSP 實驗室
6/24/2005
Contents
Abstract in Chinese………..i Abstract in English………...……….ii Acknowledgements……….iv Contents………vi List of Tables………..…………ix List of Figures……….………...…x List of Symbols………..…….…….xiii 1 Introduction……….………...1 1.1 Motivations……….…….11.2 Organizations of the dissertation………5
2 Basic Concepts………...6
2.1 Overview……….6
2.2 Robust Stability Criteria………6
2.3 Describing Function………8
2.4 Parameter Space Method……….8
2.4.1 Limit Cycle Prediction………10
2.4.2 GM Analysis without Nonlinearities………..11
2.4.3 PM Analysis without Nonlinearities………...11
2.4.4 Controller Design………12
2.5 Sensitivity Function………...13
2.6 Concluding Remarks……….13
3 Robust Control Design for Perturbed Systems by Frequency Domain Approach…16 3.1 Overview……….………16
3.2 Sensitivity………17
3.3.1 Parameter Space Method………..…19
3.3.2 Gain Margin Analysis……….20
3.3.3 Phase Margin Analysis………...21
3.3.4 Controller Design………...22
3.4 An Example and Simulation Results………24
3.4.1 GM and PM Analysis……….24
3.4.2 Controller Design………...27
3.5 Concluding Remarks……….31
4 Gain-Phase Margin Analysis of Nonlinear Perturbed Vehicle Control Systems for Limit Cycle Prediction……….40
4.1 Overview………...40
4.2 Preliminary……….….………41
4.3 Problem Solution……….42
4.3.1 Case 1: Gain-phase Margin Analysis in v− Plane………...44 µ 4.3.2 Case 2: Gain-phase Margin Analysis in v− − Space…………..45 µ m 4.4 Concluding Remarks………46
5 Parameter Plane Analysis of Fuzzy Vehicle Steering Control Systems……….51
5.1 Overview……….……….51
5.2 Vehicle Model………..51
5.3 Describing Function of Static Fuzzy Controller………..53
5.4 Stability Analysis of Fuzzy Vehicle Control Systems……….54
5.5 Simulation Results………58
5.6 Concluding Remarks………59
6 Robust Design for Perturbed Phase-Locked Loops………66
6.1 Overview………..66
6.2 Basic Concept of PLL…………..……….67
6.3 Stability Boundary Analysis……….68
6.3.2 Phase Boundary Curves……….70
6.3.3 PLL Robust Design………70
6.4 Simulation Results of PLL Design for GM≥3dB and PM≥30○…………..72
6.4.1 The First Order LF……….72
6.4.2 The Second Order LF……….74
6.5 Concluding Remarks………76
7 Conclusions and Suggestions for Future Research……….89
7.1 Conclusions……….……89
7.2 Suggestions for Future Research………90
Reference………..………91
VITA………....97
List of Tables
Table 3.1 The GM and PM of the system with c2 =2344………37
Table 3.2 The GM and PM of the system with co =9375……….37
Table 5.1 Vehicle system quantities………60
Table 5.2 Vehicle system parameters………..60
Table 5.3 Rules of fuzzy controller……….62
Table 5.4 Parameters of fuzzy controller……….62
Table 6.1 The PMs of the PLL system with the first order LF at the points of S at 1 2 Q =(k Rd, )=(1.8,14Kohm) and kv =130000………..81
Table 6.2 The PMs of the PLL system with the first order LF at the points of S at 6 2 2 Q =( ,k Rv )= ×(3 10 ,5.1Kohm) and kd =0.6………83
Table 6.3 The Coordinates of the vertices of 3D Perturbed Parameter Space R ...84
Table 6.4 The PMs of the PLL system with the second order LF at the points of R at 1 2 Q =(k Rd, )=(0.2, 60Kohm) and kv =130000………..86
Table 6.5 The PMs of the PLL system with the second order LF at the points of R at 4 4 2 Q =( ,k Rv )= ×(5 10 , 45Kohm) and kd =0.8...88
List of Figures
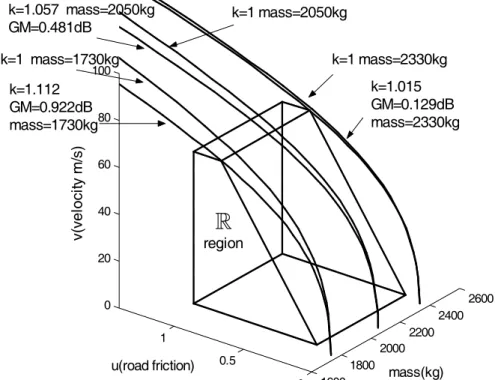
Fig. 3.1 The perturbed vehicle control system with uncertain parameter q ………...32 Fig. 3.2 The perturbed vehicle control system in series with a gain-phase tester……32 Fig. 3.3 The parameter domain region in q1-q2 plane……….33 Fig. 3.4 Gain boundary curves by varying k with GM=-4.3dB………33 Fig. 3.5 Phase boundary curves by varying θ with PM=19.336○……….34 Fig. 3.6 The 3D perturbed parameter space R with 3 uncertain parameters m v, and
µ………34
Fig. 3.7 Gain boundary curves in 3D with by varying k with GM=-4.3dB………….35 Fig. 3.8 Phase boundary curves in 3D with PM=19.336○………...35 Fig. 3.9 The controller coefficient region for GM≥3dB and PM≥300 as indicated
in the shaded area in c0− plane with c1 c2 =2344………..36 Fig. 3.10 The controller coefficient region for GM≥3dB and PM≥300 as indicated
in the shaded area in c1−c2 plane with c0 =9375………..36 Fig. 3.11 Bode plots of magnitude and phase with c0 =180.7,c1 =18.83andc2 =2344
at four vertices of the perturbed region S ……….38 Fig. 3.12 Bode plots of magnitude and phase with c0 =9375,c1=410 andc2 =6000 at
four vertices of the perturbed region S ……….38 Fig. 3.13 A chosen controller at the point Q1 with c0 =180.7,c1 =18.83 and c2=2344 based on the control system at the vertex A (20, 32) of the perturbed parameter region S ………...39 Fig. 3.14 A chosen controller at the point Q2 with c0 =9375,c1=410 and c2 =6000
based on the control system at the vertex B (20, 24) of the perturbed parameter region S ...39 Fig. 4.1 The block diagram of a nonlinear control system with a gain-phase margin
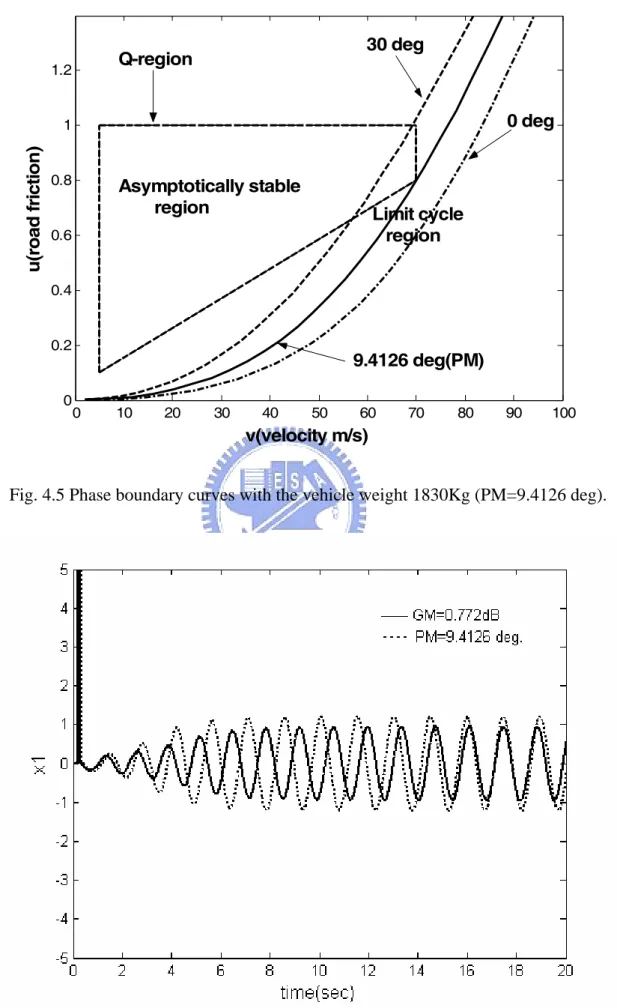
tester……….47 Fig. 4.2 The block diagram of the perturbed nonlinear system………47 Fig. 4.3 The limit cycle loci in the parameter plane……….48 Fig. 4.4 Gain boundary curves with the vehicle weight 1830Kg.(GM=0.772dB)…48 Fig. 4.5 Phase boundary curves with the vehicl weight 1830Kg (PM=9.4126 deg)…49 Fig. 4.6 Simulation results in time-domain with increased gain and phase………….49 Fig. 4.7 Gain boundary curves in 3-dimension………....50
Fig. 4.8 Phase boundary curves in 3-dimension………...50
Fig. 5.1 Single track vehicle model………..60
Fig. 5.2 Operating range………...61
Fig. 5.3 Block diagram of a fuzzy vehicle control system………...61
Fig. 5.4 Block diagram of a fuzzy vehicle control system………...61
Fig. 5.5 Membership functions of fuzzy controller………..62
Fig. 5.6 Control surface………62
Fig. 5.7 Limit cycle loci………63
Fig. 5.8 Time responses of input signal………63
Fig. 5.9 Stability boundary………...64
Fig. 5.10 Stability boundary………64
Fig, 5.11 GM and PM analysis………65
Fig. 6.1 The functional block diagram of PLL……….77
Fig. 6.2 The linearized mathematical model of PLL………77
Fig. 6.3 The closed feedback system with a gain-phase margin tester ke−jθ………..78
Fig. 6.4 The first order loop filter……….78
Fig. 6.5 The second order filter………79
Fig. 6.6 The 2D perturbed plane S with the perturbed parameters R1 and C1…..79
Fig. 6.7 The designed-parameter shaded area in k k -Rd v 2 plane meeting the phase specifications PM≥30○ with the first order LF……….80
Fig. 6.8 The designed-parameter shaded area in k -Rd 2 plane meeting the phase specifications PM≥30○ with kv =130000………80
Fig. 6.9 The bode plots of the PLL system at the vertices of the region S with 1 2 Q =(k Rd, )=(1.8,14Kohm) and kv =130000……….81
Fig. 6.10 The designed-parameter shaded area in k -Rv 2 plane meeting the phase specifications PM≥30○ with kd =0.6……….82
Fig. 6.11 The bode plots of the PLL system at the vertices of the region S with Q2 = 6 2 ( ,k Rv )= ×(3 10 , 5.1Kohm) and kd =0.6………..…82
Fig. 6.13 The designed-parameter shaded area in k k -Rd v 2 plane meeting the phase specifications PM≥30○ with the second order LF……….83 Fig. 6.14 The designed-parameter shaded area in k -Rd 2 plane meeting the phase specifications PM≥30○ and kv =130000 with the second order LF………85 Fig. 6.15 The enlarged designed-parameter shaded area in k -Rd 2 plane meeting the
phase specifications PM≥30○ and kv =130000 with the second order LF………85 Fig. 6.16 The bode plots of the PLL system at the vertices of the region R at
3 2
Q =(k Rd, )=(0.2, 60Kohm) and kv =130000 with the second order LF………...86 Fig. 6.17 The designed-parameter shaded area in k -Rv 2 plane meeting the phase
specifications PM≥30○ and kd =0.8 with the second order LF..87 Fig. 6.18 The enlarged designed-parameter shaded area in k -Rv 2 plane meeting the phase specifications PM≥30○ and kd =0.8 with the second order LF…87 Fig. 6.19 The bode plots of the PLL system at the vertices of the region R at
4
4 2
List of Symbols
N describing function
φ phase shift
A amplitude of limit cycle ω frequency of limit cycle
k gain
θ phase
Φ input signal range of fuzzy logic S 2D perturbed parameter plane R 3D perturbed parameter space
Chapter 1
Introduction
1.1 Motivations
Gain margin and phase margin are important specifications in the frequency domain for
the analysis and design of practical control systems and have served as important measures of
robustness analysis which is always of primary concern. This is because the models used are
usually imprecise and the parameters of all physical systems vary with the operating
conditions and time. They are usually obtained numerically or graphically by the use of
system frequency response like Bode plots. Studying for controller design to satisfy GM, PM
or sensitivity conditions was proposed by several articles such as in [1]-[6], There are also
many design methods to determine the parameters to meet different objectives [7]-[9].
Designing a controller for a fixed and exact control plant is not usually practical in the natural
environments. Due to the simplified models or the factors resulting from the changing
environments, the uncertainties in system parameters can always occur. Uncertain parameters
stability of perturbed interval polynomials, is to guarantee if all the polynomials have the
roots in the left-half plane [17]. The perturbed parameters will result in root-clusters, within
which the roots of the perturbed polynomials will be located. Usually, a change in a physical
quantity typically appears in more than one coefficient of the characteristic equation. Robust
Gamma-stability analysis for a perturbed vehicle plant was also studied [18]. The methods of
analyzing the gain-phase margin of a linear control system with adjustable parameters have
been developed [19]-[21]. Strictly speaking, the majority of the researches mentioned above
are not concentrated on the controller design for perturbed systems. Sensitivity functions are
usually used as a design specification to indicate the robustness of a system. In [6] and [8],
Yaniv and Nagurka proposed a robust controller design method satisfying GM, PM and
sensitivity constraints on the perturbed systems, not with the system parameters in uncertain
continuous intervals, but with the system uncertainties in the finite discrete set of gains and
pole locations.
Undesirable oscillation phenomena due to nonlinearities in a feedback closed system
have been studied by many publications [22]-[26] and it is important for the designer to
predict the limit cycle behavior of a perturbed vehicle system with nonlinearities. It is of
interest to know the frequency, amplitude, stability and instability of the limit cycle occurred.
amplitude oscillations of closed nonlinear systems and has been successfully used in many
applications although some limitations exist in the systems which don’t satisfy the assumption
of filtering out the higher order harmonics [27]-[30].
In addition, some researchers have developed the experimental and analytic describing
functions of fuzzy controller in order to analyze the stability of fuzzy control systems [31-32].
Furthermore, the describing function technique to design a fuzzy controller for switching
DC-DC regulators was proposed by Gomariz et al [33]. The describing function was also
applied to find the bounds for the neural network parameters to have a stable system response
and generate limit cycles [34]. The results in [32] and [33] are extended to analyze the
stability of a fuzzy vehicle steering control system under the effects of system parameters and
gain-phase margin by the use of methods of describing function, parameter plane and a
gain-phase margin tester. A simple vehicle steering control model with perturbed parameters
is cited to verify the design procedure.
On the other hand, there are a large number of studies concentrated on the subject of
phase-locked loops (PLL) in the latest decades. The theoretical description of PLL was well
proposed [35]-[39]. A PLL is essentially a circuit that has a particular system lock its
frequency as well as the phase to those of the input applied to it. When the phase error is built
error is reduced to a minimum and a phase output of VCO is really locked to the reference
input. There are a considerable number of applications in many areas. A technique using PLL
was established on motor speed control [40]. In the design of Global Positioning System
receivers, PLL is very useful especially in a noisy environment [41]. PLL was also applied in
the design of frequency synthesizer [42].
In this thesis, GM and PM performances are defined for a perturbed system with
uncertain continuous interval parameters and shown here graphically in the system parameter
space. By the use of parameter space method and robustness stability criteria, stability
boundary curves corresponding to specific GM and PM constraints are generated. Owing to
the complexity of the controller design for perturbed control systems, it is not an easy job to
find out a qualified controller together with the system plant with uncertain interval
parameters so that the whole closed system at every point in the perturbed system parameter
region satisfies all the three specifications of GM, PM and sensitivity. The main concern in
the controller design is to find a desired region in the controller coefficient plane so that the
performance of the whole systemwith uncertain parameters inside a perturbed space satisfies
given specifications. The desired controller will be determined graphically from a figure in
which a qualified controller coefficient area is to be found out. With the help of stability
controller meeting the specified requirements is achieved.
1.2 Organizations of the Dissertation
The dissertation is organized as follows. Chapter 1 is an introduction. Basic concepts are
described in Chapter 2. In Chapter 3, a perturbed vehicle control system whose gain margin
(GM) and phase margin (PM) are analyzed and for which a novel controller design method
satisfying the given specifications on GM, PM and sensitivity is developed. In Chapter 4, the
subject of predicting the limit cycle of a nonlinear perturbed vehicle control system under
specific gain-phase margin (GM/PM) constraints is addressed. The analysis of robust stability
for a fuzzy vehicle steering control system is considered in Chapter 5. In Chapter 6, a control
algorithm is presented for phase-locked loop (PLL) design with perturbed parameters
satisfying frequency-domain specifications. In Chapter 7, conclusions are given and
Chapter 2
Basic Concepts
2.1 Overview
This chapter presents a description about the way how to analyze and design a feedback
control system with perturbed parameters varying in intervals by frequency approach.
Parameter space method and robust stability criteria provide a technique to check the stability
of perturbed control systems in a space with the coordinates of uncertain system parameters.
By the use of a gain-phase margin tester, stability boundary curves are generated to determine
gain and phase margins (GM and PM) in performance analysis. In the similar way, desired
controller coefficients are going to be found out to meet given specifications for controller
design. Sensitivity function is also considered in the controller design. With the nonlinearities
inherent in the system, describing function method is used for predicting limit cycle occurred.
2.2 Robust Stability Criteria
Consider the characteristic polynomial of a feedback control system
0 1 0 ( , ) ( ) ( ) ( ) ( ) n i n i n i P s q d q s d q d q s d q s = =
∑
= + +⋅⋅⋅⋅+ , (2.1)where q=[ ,q q1 2,⋅⋅⋅⋅qn]∈ℜ and ℜ is a set of allowable parameter domain space. Each q i
varies independently within the interval with qi ∈[qi−;qi+],i= 21, ⋅ ⋅⋅n.
It has been shown that for real continuous coefficient functions di( )q of the characteristic equation, a sufficient condition for robust stability is that (a) there exists a
o
q=q ∈ℜ such that P s q( , ) is stable; (b) P s q( , ) doesn’t have any roots on the imaginary
axis for any q∈ℜ. It is easily tested by checking the stability of the characteristic
polynomial P s q( , o) for an arbitrary qo∈ ℜ. If no such qo exists, the system is unstable.
The condition (b) is satisfied if and only if the equation P s q( , )=0 neither has a real root at
0
s= , i.e.
0( )q 0
d ≠ (2.2)
nor an imaginary pair of roots at s= ±jω for all q∈ ℜ. Let ℜ be the set of all real q jω such that the polynomial P s q has roots on the imaginary axis . ( , )
{ : ( , ) 0 for 0}
jω q P jω q ω
ℜ = = ≥ . (2.3)
The condition (b) also means that ℜ does not intersect the parameter domain space jω
ℜ. The curve formed by the points q in ℜ in the jω q−space is the stability boundary curve. The perturbed feedback control system is stable at the points in the q−space on one
side of the stable boundary curve and it is unstable at the points on the other side. The above
2.3 Describing Function
It is generally useful for the describing function technique to be applied in engineering
problems of control systems. Nonlinear systems are generally linearized by using the
describing function method to predict the limit cycle for stability analysis. Assume a
sinusoidal input x t( )= Asin(ωt) with the amplitude A and the frequency ω to a nonlinear system in Fig. 2.1 and y(t) is the output signal and periodic. By the Fourier series,
0 1 ( ) ( nsin( ) ncos( )), n y t a a n tω b n tω ∞ = = +
∑
+ (2.4) where 2 0 0 2 0 2 0 1 ( ) ( ), 2 1 ( ) sin ( ), 0 , 1 ( ) cos ( ), 0. n n a y t d t a y t n td t n b y t n td t n π π π ω π ω ω π ω ω π = = ≠ = ≠∫
∫
∫
(2.5)If the nonlinear system is symmetric about the origin, a0 = . Let Y be a fundamental 0
component of the Fourier series of y(t) and Y= +a1 jb1= ∠Y1 θ1, where
2 2 1 1 1 Y = a +b and 1 1 1 1 tan b a θ = −
. Y1 is the amplitude of the fundamental component of the system output y t( )
and θ is the phase shift by Fourier series.
The describing function N of a symmetric nonlinear system is defined as [28]
1 1 1 1 1 Y a jb N A θ A θ + = ∠ = ∠ (2.6)
Consider a perturbed closed control system with a gain-phase margin tester ke−jθ and there are r nonlinear components in the system. Every nonlinear component has the
complex describing function N (i i=1, 2,...., )r that is a complex function of A and ω,
which are the amplitude and frequency respectively of the input signal to the i−th nonlinear
element N and i
i iR iI
N =N + jN . (2.7)
Assume the closed characteristic equation is , 1 1I R I , 1 1I R I R I ( , , , , , , ..., ) the numerator of [1 ( , , , , ..., , ,..., )] 0, R r r j R m m r r P s q c k N N N N ke θG s q c N N N N N N θ − = + = (2.8) and , , 1 1I R I , , 1 1I R I 0 , , 0 1 1I R I 1 1 , , 1 1I R I ( , , , , , , ..., ) ( , , , , , ..., ) ( , , , , , ..., ) ( , , , , ,..., ) ( , , , , , ..., ) , R r r n t t R r r t R r r r n n R r r P s q c k N N N N d q c k N N N N s d q c k N N N N d q c k N N s d q c k N N N N s θ θ θ θ θ = = ∑ = + + ⋅⋅⋅ + (2.9)
where G s q c N( , , , 1R,N1I,...,NrR,NrI) is an open loop transfer function of the system and c is a controller coefficient vector. c=[ , ,...c c0 1 cm] and c is a controller coefficient to be i designed for i=0,1, 2,...m.
, ,
1 1I R I
( , , , , , R, ..., r r )
P jω q c k θ N N N N may be written into the real part U( , , , , ,ω q c k θ N1R,N1I,. ,
R I)
..,Nr Nr and imaginary part V( , , , , ,ω q c k θ N1R,N1I,...,NrR,NrI).
, , 1 1I R I 1 1I R I 1 1I R I ( , , , , , , ,..., , ) ( , , , , , , ..., ) ( , , , , , , ,..., , ) R r r R r r R r r P j q c k N N N N U q c k N N N N jV q c k N N N N ω θ ω θ ω θ = + (2.10)
where 1 1I R I 0 1 1I R I 1 1 1I R I 2 2 1 1I R I 1 1I R I ( , , , , , , ,..., , ) ( , , , , ,..., , ) ( , , , , , ,..., , ) ( , , , , , ,..., , ) ( , , , , , ,..., , ) R r r R r r R r r R r r n n R r r U q c k N N N N r q k N N N N r q c k N N N N r q c k N N N N r q c k N N N N ω θ θ θ ω θ ω θ ω = + + + ⋅⋅⋅ + (2.11) and 1 1I R I 0 1 1I R I 1 1 1I R I 2 2 1 1I R I 1 1I R I ( , , , , , , ,..., , ) ( , , , , ,..., , ) ( , , , , , ,..., , ) ( , , , , , ,..., , ) ( , , , , , ,..., , ) . R r r R r r R r r R r r n n R r r V q c k N N N N i q k N N N N i q c k N N N N i q c k N N N N i q c k N N N N ω θ θ θ ω θ ω θ ω = + + + ⋅⋅⋅ + (2.12) The equations 1 1I R I 1 1I R I ( , , , , , , ,..., , ) 0 ( , , , , , , ,..., , ) 0 R r r R r r U q c k N N N N V q c k N N N N ω θ ω θ = ⎧ ⎨ = ⎩ (2.13)
can be solved for q or for c.
2.4.1 Limit Cycle Prediction
For predicting the limit cycle resulting from nonlinearities N , (2.13) is solved for i q given specific ω, , ,c k θ and A in system performance analysis analytically or numerically. Gain boundary curves will be generated from these q values in the q -parameter space by
varying ω given specific k and A with θ =0○ . Phase boundary curves will be
generated by varying ω given specific θ and A with k =1. Every boundary curve separates the parameter domain region into two areas as in Fig. 2.2. One is the asymptotically
system parameter point q is in the unstable area, but it won’t if q is in the stable area. The
gain and phase margins of the perturbed control system will be analyzed from boundary
curves geometrically. A specific gain or phase value corresponding to the boundary curve
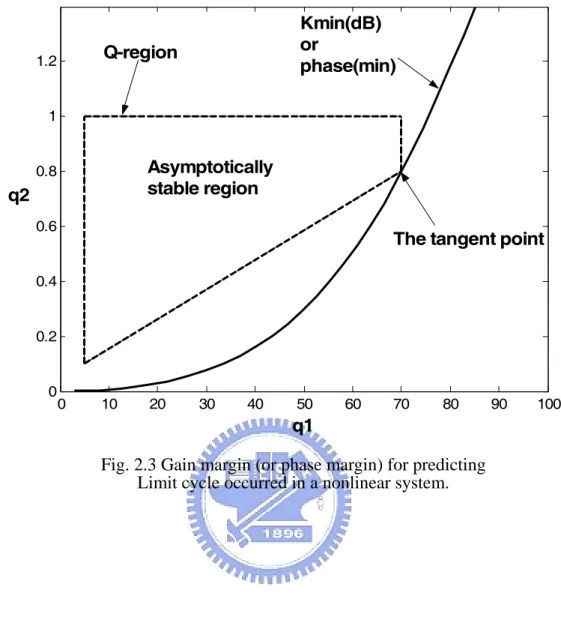
which is tangent to the perturbed parameter region as in Fig. 2.3 is defined as the GM and PM
of the perturbed system for predicting the limit cycles occurring, respectively.
2.4.2 GM Analysis without Nonlinearities
If there is no nonlinear part in a perturbed system, N1R,N1I,...,NrR, and NrI in (2.10)-(2.13) are omitted.
Equation (2.13) is rewritten into the following form ( , , , , ) 0 ( , , , , ) 0 U q c k V q c k ω θ ω θ = ⎧ ⎨ = ⎩ (2.14) Equation (2.14) can be solved for q with specific ω, , ,c k θ . For gain margin analysis, a gain boundary curve is generated in q−space from the solutions q of (2.14) by varying ω for
every k with θ =0Ο. A specific gain k (dB) corresponding to the boundary curve which
is tangent to the perturbed region ℜ is defined as the GM of the perturbed control system. It is also the minimal GM of the system within the entire region ℜ. The GM of the control system at a point on one side of a specific gain boundary curve is greater than that at a point
on the boundary curve. But it is less at the points on the other side.
Equation (2.14) can be solved for q with respect to θ , given specific ω, ,c k. Phase boundary curves are developed under the PM specification in a similar way with k =1. They are generated in q−space from the solutions q of (2.14) by varying ω for every θ . The
PM of the control system is defined as the phase value θ associated with the phase boundary
curve which is tangent to the perturbed region ℜ. It is the minimal PM for the whole system with the parameters inside ℜ, too. The PM of the control system at a point on one side of a specific phase boundary curve is greater than that at a point on the boundary curve. But it is
less at a point on the other side.
2.4.4 Controller Design
The controller design is to determine the desired controller coefficients in selected c
-space. Based on gain-phase boundary curves drawn from the locations of the roots of (2.14)
for c and the constant-sensitivity loci, the desired area in c−space is found so that the
whole system with the controller in that area will meet specified conditions.
First, determine a gain region in c−space with the help of the gain boundary curves so that
the controller with the coefficients in that region satisfies the specified GM constraints.
Secondly, a phase-region is determined in c−space with the help of the phase boundary
curves so that the controller with the coefficients in that region satisfies the specified PM
The controller coefficients in that region will satisfy both the user-defined GM and PM
specifications.
2.5 Sensitivity Function
Sensitivity effects are often important to be considered in the design of control systems
on frequency domain and can be used as a design specification to indicate the robustness of
control system. The sensitivity function of the closed-loop transfer function H(s) with respect
to the variations of the transfer function G(s) which is a subsystem of H(s) is defined as ( ) ( ) ( ) / ( ) ( ) / ( ) H s G s H s H s S G s G s ∂ = ∂ (2.15) or with respect to the variations of an element β in H(s) is given by
( ) ( ) / ( ) / H s H s H s Sβ β β ∂ = ∂ . (2.16)
2.6 Concluding Remarks
In this chapter, basic concepts of performance analysis and controller design for
perturbed control systems are addressed based on parameter space method and robust stability
criteria. GM and PM are analyzed and the desired controller is determined by the proposed
methods with the help of a gain-phase margin tester. Limit cycles are also predicted for
( )
cos
x t
=
A
ω
t
y t
( )
Fig. 2.1 A nonlinear system with input signal
x t
( )
=
A
cos
ω
t
0 10 20 30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1 1.2 Q-region Asymptotically stable region Limit cycle region q2 q1
Stability boundary curve
0 10 20 30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1 1.2 Kmin(dB) or phase(min) Q-region Asymptotically stable region
The tangent point q2
q1
Fig. 2.3 Gain margin (or phase margin) for predicting Limit cycle occurred in a nonlinear system.
Chapter 3
Robust Control Design for Perturbed
Systems by Frequency Domain Approach
3.1
Overview
The chapter presented here is concentrated on a perturbed vehicle control system whose
gain margin (GM) and phase margin (PM) are analyzed and for which a novel controller
design method satisfying the given specifications on GM, PM and sensitivity is developed.
The approach is applied to the plants with uncertain parameters that vary in intervals. Based
on the parameter space method and robust stability criteria, gain and phase boundary curves
are generated from the characteristic polynomial of the system with which a gain-phase tester
is included in series to perform system stability analysis and controller design. The main
concern in the controller design is to find a region in the controller coefficient plane so that
the performance of the uncertain system satisfies given specifications. The proposed method
is applied to an example of a bus system. Simulation results are given for illustration to show
the system performances on GM and PM and the desired controller meeting the specified
3.2 Sensitivity
Since in physical systems all the elements may change their properties with time and
environments, the considerations about the changes of the characteristics of the closed control
systems with respect to system parameter variations are always of big concern for a system
designer.
Consider a linear control feedback system illustrated in Fig. 3.1. The closed loop
feedback system has the transfer function given by
( , ) ( , ) ( , , ) 1 ( , ) ( , ) C s c G s q H s q c C s c G s q = + , (3.1)
where ( , )C s c is a controller with c=[ , ,...c c0 1 cm] and c is a controller coefficient to be i designed for i=0,1, 2,...m . G(s,q) is a plant with a perturbed parameter vector
1 2
[ , , n]
q= q q ⋅⋅⋅⋅q ∈ℜ . ℜ is a set of allowable parameter domain space. Each q varies i independently within the interval with qi∈[qi−;qi+],i= 21, ⋅ ⋅⋅n.
Assume ( , ) ( , ) ( ) c c N s c C s c D s = (3.2) and ( , ) ( , ) ( , ) G G N s q G s q D s q = . (3.3)
With a specific q , H s q c is replaced by ( , , ) H s c .The sensitivity function ( , ) H( , )
i
s c c
respect to the controller coefficient c is defined as i ( , ) ( , ) / ( , ) / i H c i i s c dH s c H s c S dc c = , (3.4)
where i=0,1, 2....m. Substitute (3.1), (3.2) and (3.3) into (3.4), and the sensitivity function ( , )
i
H c
s c
S can be computed. Given a different constant s , the solutions of the equality 0
( ) 0 H j i s j c S ω s ω
= = for a controller coefficient c give constant-sensitivity loci in the c−space. The controller coefficient c will be determined based on sensitivity specifications
corresponding to one of those loci. A system being very insensitive to parameter variations is
considered to be a good control system.
3.3 Stability Boundary Analysis
Consider a gain-phase tester ke−jθ included in series with the original control system as in Fig. 3.2, and its transfer function is given by
( , ) ( , ) ( , , , , ) 1 ( , ) ( , ) j j Ke C s c G s q H s q c K Ke C s c G s q θ θ θ = −− + . (3.5)
The characteristic polynomial is P s q c k( , , , , )θ and
0 0 1 ( , , , , ) the numerator of [1 ( , ) ( , )] ( , , , ) ( , , , ) ( , , , ) ( , , , ) j n i i i n n P s q c k ke C s c G s q d q c k s d q c k d q c k s d q c k s θ θ θ θ θ θ − = = + = = + + ⋅⋅⋅⋅ +
∑
. (3.6)By the use of the parameter space method and robust stability criteria, system stability
perturbed control systems in which the parameters of the characteristic polynomial lie within
given intervals, the minimum of all the GM values of the system at the points inside the entire
perturbed region in the parameter space is defined to be the GM of the system. The PM of the
system is defined in the same way.
3.3.1 Parameter Space Method
The parameter space method is a good analytical technique to perform system analysis in
the selected system parameter plane for a control system which is described by its
characteristic polynomial, the roots of which generate stability boundary curves in the
parameter plane. The characteristic polynomial on the jω-axis P j( ω, , , , )q c k θ may be
written into the real part U( , , , , )ω q c k θ and the imaginary part V( , , , , )ω q c k θ . ( , , , , ) ( , , , , ) ( , , , , ) 0 P jω q c k θ =U ω q c k θ + jV ω q c k θ = , (3.7) where 2 0 1 2 ( , , , , ) ( , , , ) ( , , , ) ( , , , ) n( , , , ) n U ω q c k θ =r q c k θ +r q c k θ ω+r q c k θ ω + ⋅⋅⋅ +r q c k θ ω (3.8) and 2 0 1 2 ( , , , , ) ( , , , ) ( , , , ) ( , , , ) n( , , , ) n V ω q c k θ =i q c k θ +i q c k θ ω+i q c kθ ω +⋅⋅⋅+i q c k θ ω (3.9) The equations ( , , , , ) 0 ( , , , , ) 0 U q c k V q c k ω θ ω θ = ⎧ ⎨ = ⎩ (3.10) can be solved analytically or numerically for q or c. Gain and phase boundary curves are
generated both in q−space from the solutions q for GM and PM analysis and in
space
c− from the solutions c for the controller design under specified conditions.
In the analysis of GM and PM, a fixed controller is used to analyze the system
performance, and (3.7)-(3.10) don’t depend on c. The gain and phase margins of the
perturbed vehicle system will be analyzed geometrically in 2 and 3 dimensions from stability
boundary curves.
In controller design, (3.10) can be solved for c with specific ω θ, ,k and q in a similar way. Gain and phase boundary curves are developed in the c−space according to
different gain k and θ , respectively.
3.3.2 Gain Margin Analysis
Let 0θ = Ο and c be a specific controller coefficient in Fig. 3.2. Equations (3.7) and
(3.10) are rewritten into the forms
( , , ) ( , , ) ( , , ) 0 P jω q k =U ω q k + jV ω q k = (3.11) and ( , , ) 0 ( , , ) 0 U q k V q k ω ω = ⎧ ⎨ = ⎩ , (3.12) where 2 0 1 2 ( , , ) ( , ) ( , ) ( , ) n( , ) n U ω q k =r q k +r q k ω+r q k ω + ⋅⋅⋅ +r q k ω (3.13) and
2
0 1 2
( , , ) ( , ) ( , ) ( , ) n( , ) n
V
ω
q k =i q k +i q kω
+i q kω
+⋅⋅⋅+i q kω
. (3.14)A gain boundary curve is generated in q−space from the solutions q of (3.12) by varying ω for every k. By varying k the curve is approaching to the parameter region ℜ gradually and finally intersect with ℜ. A specific gain k (dB) corresponding to the
boundary curve which is tangent to the parameter perturbed region ℜ is defined as the GM of the perturbed control system. It is also the minimal GM of the system within the entire
region ℜ. The GM of the control system at a point on one side of a specific gain boundary curve is greater than that at a point on the boundary curve. But it is less at the points on the
other side.
3.3.3 Phase Margin Analysis
Given k =1 and a specific c in Fig. 3.2, (3.7) and (3.10) are rewritten into the forms ( , , ) ( , , ) ( , , ) 0 P jω θq =U ω θq + jV ω θq = (3.15) and ( , , ) 0 ( , , ) 0 U q V q ω θ ω θ = ⎧ ⎨ = ⎩ , (3.16) where 2 0 1 2 ( , , ) ( , ) ( , ) ( , ) n( , ) n U ω θq =r qθ +r q θ ω+r qθ ω + ⋅⋅⋅ +r qθ ω (3.17) and 2 0 1 2 ( , , ) ( , ) ( , ) ( , ) n( , ) n V
ω θ
q =i qθ
+i qθ ω
+i qθ ω
+⋅⋅⋅+i qθ ω
. (3.18)Phase boundary curves are developed under the PM specification in a similar way. They are
generated in q−space from the solutions q of (3.16) by varying ω for every θ . The PM
of the control system is defined as the phase value θ associated with the phase boundary
curve which is tangent to the perturbed region ℜ. It is the minimal PM for the whole system with the parameters inside ℜ, too. The PM of the control system at a point on one side of a specific phase boundary curve is greater than that at a point on the boundary curve. But it is
less at a point on the other side.
3.3.4 Controller Design
The controller design is based on gain-phase boundary curves which are drawn in
space
c− from the locations of the roots of the polynomial equation (3.10) with respect to
different k and θ , and the constant-sensitivity loci which are drawn based on the solutions
of the H j( ) 0
i s j
c
S ω s
ω
= = for the controller coefficient c in c−space with respect to the given sensitivity constant s . The desired coefficients are determined under the constraints of 0
specified GM, PM and sensitivity. Systems with high stability and low sensitivity are desired.
Based on the discussions mentioned above, the design algorithm is as the followings:
Step 1: Set up user-defined specifications on GM, PM and sensitivity.
Step 2: For every system parameter q at the vertices of the perturbed system parameter
0dB in c-plane by solving (3.12).
Step 3: For every q at the vertices of the perturbed system parameter region in q -plane,
draw the phase boundary curves corresponding to the specified PM and 0○ in c-plane by
solving (3.16).
Step 4: Sketch the sensitivity constant loci from the solutions of the sensitivity equation
( ) 0 H j i s j c S ω s ω = = for c, given s . 0
Step 5: Determine a gain region in c−space with the help of the gain boundary curves as in
step 2 so that the controller with the coefficients in that region satisfies the specified GM
constraints.
Step 6: Determine a phase-region in c−space with the help of the phase boundary curves as
in step 3 so that the controller with the coefficients in that region satisfies the specified PM
constraints.
Step 7: Find out the common region of the determined gain and phase ones as in steps 5 and 6.
The controller with the coefficients in that region is the desired one satisfying the specified
GM and PM conditions.
Step 8: Choose a point in c−space on a specified sensitivity constant locus which passes
through the common region as in step 7. Then the controller coefficient at that point satisfies
tradeoff has to be made among the three specified conditions.
3.4 An Example and Simulation Results
In this simulation, a Daimler Benz 0305 bus [18] is adopted. Its linearized system with
actuator input δ =steering angle rate, and output y=displacement of front antenna, has the
following transfer function
2 2 2 1 2 1 1 1 2 3 2 2 2 1 2 1 2 1 2 609.8 388600 48280 ( , , ) ( 1077 16.8 270000) q q s q s q G s q q s q q s q q s q q + + = + + + , (3.19)
where the parameter q1 =v is the bus velocity, and the other parameter
u m q2 = .
m: the mass of the bus (tons). u : road friction coefficient (0.5 for wet road, 1 for dry road).
1 1 1 2 [12 , 20 ] [24 ; 32 ] q ms ms q tons tons − − ∈ ∈ . (3.20) 3.4.1 GM and PM Analysis
The controller used is taken as given by
2 3 2 2344 10938 9375 ( ) 50 1250 15625 s s C s s s s + + = + + + (3.21) and was determined by Muench [18].
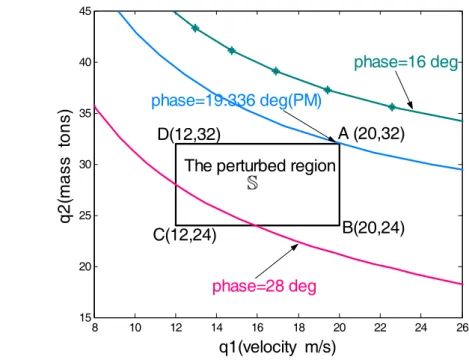
Case 1 : 2D GM/PM Analysis in q1−q Plane2 . Consider the system parameter q=[ ,q q1 2] with an uncertain parameter region S as in Fig. 3.3 for studying GM/PM performances.
The S−parameter region is
1 2 12 20 24 32 q q ≤ ≤ ⎧ ⎨ ≤ ≤ ⎩ (3.22)
and the closed-loop characteristic polynomials is as in (3.6). By substituting s= jω into the
numerator of the above polynomials and by lengthy computation, the coefficients of the real
part polynomial U( , , , )ω q k θ with a specific c in (3.8) are 2 8 0 1 2 9 8 1 1 1 2 2 9 8 2 1 1 2 1 2 8 3 1 2 1 2 5 4 1 2 1 2 4.5262 10 cos( ), (3.6431 10 5.2808 10 ) sin( ), ( 4.2505 10 5716875 1.1316 10 ) cos( ), (6669992.4 9.1087 10 ) sin( ), 16828125 21000 3375 10 14293 r q k r q q k r q q q q k r q q q k r q q q q θ θ θ θ = × = × + × × = − × − − × × = − + × = + + × + 2 1 2 5 2 2 2 6 1 2 1 2 1 2 7 2 2 8 1 2 71.2 cos( ), 0, 1250 16.8 53850 270000, 0, . kq q r r q q q q q q r r q q θ = = − − − − = = (3.23)
In (3.9), the coefficients of the imaginary part polynomial V( , , , )ω q k θ are 2 8 0 1 2 9 8 1 1 1 2 2 9 8 2 1 1 2 1 2 2 3 1 2 1 2 8 1 4 4.5262 10 sin( ), (3.6431 10 5.2808 10 cos( ), (4.2505 10 5716875 1.1316 10 ) sin( ), 262500 4218750000 6669992.4 cos( ) 9.1087 10 cos( ) , 1429371.2 i kq i q kq i q q q q k i q q kq q k kq i θ θ θ θ θ = − × = × + × = × + + × × = − − − × − × = − 2 1 2 2 2 2 5 1 2 1 2 1 2 6 2 2 7 1 2 1 2 8 sin( ), 5 15625 840 1346250 135 10 , 0, 50 1077 , 0. kq q i q q q q q q i i q q q q i θ = + + + × = = − − = (3.24)
Solve the equations
( , , , ) 0 ( , , , ) 0 U q k V q k ω θ ω θ = ⎧ ⎨ = ⎩ , (3.25) for q by varying k and θ , and the stable boundary representation curves for gain and
phase margins are shown as in Figs. 3.4 and 3.5 in the q1−q2 plane, respectively. We are only interested in positive solutions q1 >0 and q2 >0 for practical reasons. The GM of the perturbed control system with the domain region S is -4.3dB and its PM is 19.336○ as seen
in Figs. 3.4 and 3.5, respectively. In general, the specifications on the stability robustness
point of view are GM≥3dB and PM≥30○ , which the system with the original controller
(3.21) doesn’t satisfy. A new controller is designed in the following section and its
performance is improved significantly.
The gain boundary curves associated with different gains shown in Fig. 3.4 reveal that
the GM of the control system at a point on one side of a specific gain boundary curve is
greater than that at a point on the curve. But it is less at a point on the other side.
Similarly in Fig. 3.5, the phase boundary curves show that the PM of the control system
at a point on one side of a specific phase boundary curve is greater than that at a point on the
curve. But it is less at a point on the other side. At the point A (( ,q q1 2)=(20, 32)) in both Figs.3.4 and 3.5 the system has the minimal GM and PM of all the points within the entire S
region.
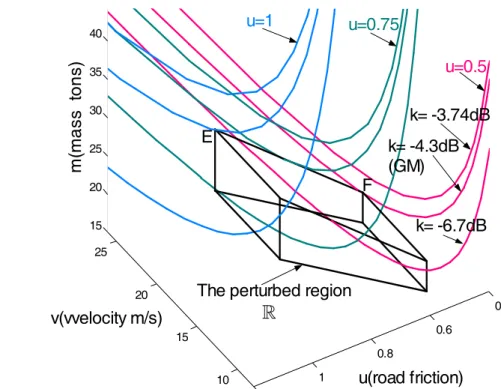
Case 2 : 3D GM/PM Analysis in m v u− − Space.
Select q=[ ,q q q1 2, 3] [ , , ]= m v u in the block diagram of the closed system in Fig. 3.2. The
24 / 32 12 20 0.5 1 m u v u ≤ ≤ ⎧ ⎪ ≤ ≤ ⎨ ⎪ ≤ ≤ ⎩ . (3.26)
Gain and phase boundary curves in the m v u− − parameter space are generated from the solutions for q to (3.12) and (3.16), respectively. Those curves corresponding to
different k and θ by varying the frequency ω are shown in Figs. 3.7 and 3.8. A specific
gain k (dB) corresponding to a boundary curve which is tangent to the perturbed region R
at a point on the edge EF of R is defined as the GM of the system. It is also the minimal
GM of the perturbed control system within R . Its PM is defined in the same way. The
system with uncertain parameters within the R−space has GM=-4.3dB and PM =19.336○.
3.4.2 Controller Design
The system parameter q=[ ,q q1 2] within S is considered for the controller design. Assume the controller to be designed is given as
2 2 1 0 3 2 ( ) 50 1250 15625 c s c s c C s s s s + + = + + + , (3.27) where c c0, 1 and c are the controller coefficients to be designed under the user-specified 2
constraints and the system parameter domain is within the region S as in Fig. 3.3. Equation
(3.21) is a special case of (3.27) with c0 =9375, c1=10938 and c2 =2344.
1) Controller Design for GM ≥3dB and PM ≥300
a coefficient region in c−space is to be found out by the use of gain and phase boundary
curves associated with different k and θ .
By solving (3.10), the coefficients of the real part of the characteristic polynomial
( , , , , ) U ω q c k θ in (3.8) are 2 0 0 1 2 1 0 1 1 1 2 2 2 1 1 0 1 2 2 1 2 3 1 1 2 2 1 2 5 4 1 2 1 2 2 1 2 2 5 48280 cos( ), (388600 48280 ) sin( ), (388600 609.8 48280 ) cos( ), (609.8 388600 ) sin( ), 16828125 21000 3375 10 , 609.8 cos( ), r c q k r c q c q k r c q c q q c q k r c q q c q k r q q q q q q c k r θ θ θ θ θ = = + × = − + + = − + = + + × + 2 2 2 6 1 2 1 2 1 2 7 2 2 8 1 2 0, 1250 16.8 53850 270000, 0, . r q q q q q q r r q q = = − − − − = = (3.28)
The coefficients of the imaginary part of the polynomial V( , , , , )ω q c k θ in (3.9) are 2 0 0 1 2 1 0 1 1 1 2 2 2 1 1 0 1 2 2 1 2 2 3 1 2 1 1 2 2 1 2 4 2 1 2 5 48280 sin( ), (388600 48280 ) cos( ), (388600 609.8 48280 ) sin( ) , 262500 4218750000 609.8 cos( ) 388600 cos( ), 609.8 sin( ), 15 i c q k i c q c q k i c q c q q c q k i q q c q q k c q k i c q q k i θ θ θ θ θ θ = − = + × = + + × = − − − × − = − = 2 2 2 1 2 1 2 1 2 5 6 2 2 7 1 2 1 2 8 625 840 1346250 135 10 , 0, 50 1077 , 0, q q q q q q i i q q q q i + + + × = = − − = (3.29)
where q=( ,q q1 2) is a specific point within S and (3.10) is rewritten into the following one.
( , , , ) 0 ( , , , ) 0 U c k V c k ω θ ω θ = ⎧ ⎨ = ⎩ . (3.30) Two controller coefficients of c c and 0, 1 c2 are chosen as adjustable parameters and the
other one is fixed for this design. By solving (3.30), a shaded area is determined by gain and
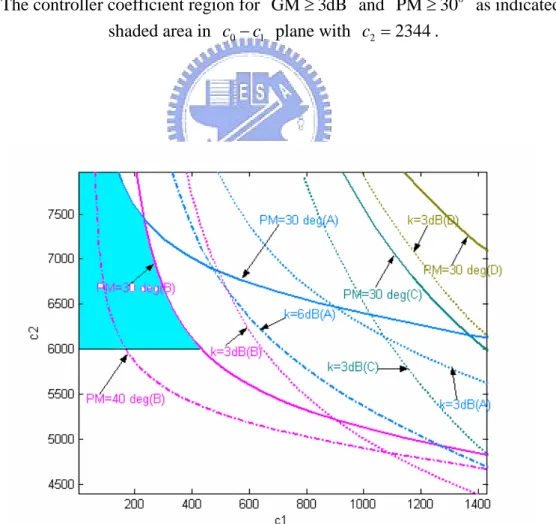
phase boundary curves from the solutions for ( , )c c pairs with 0 1 c2 =2344 under GM and PM specifications given as above in c0−c1plane, as shown in Fig. 3.9.
For the vertices A,B,C and D of S as in Fig. 3.3, stability boundary curves are plotted
to determine the qualified shaded area. Two gain boundary curves are obtained associated
with k=0dB and 3dB given θ =0○ for each vertex. In a similar way, two phase boundary ones are also generated corresponding to θ =0○ and θ =30○ with k=1.
Let c0 =9375. Select c1 and c2 as adjustable coefficients. Gain and phase stability curves are generated in the same way in c1−c2 plane and the shaded region within which
1 and 2
c c satisfy specified constraints is founded, as shown in Fig. 3.10.
In Figs. 3.9 and 3.10 the desired controller coefficients can be chosen according to the
specified gain and phase constraints. The controller coefficient is selected from the above
shaded region so that the whole system with the chosen controller has the desired
specifications. With the designed controller, Tables 3.1 and 3.2 show the GM and PM of the
system operating at several points within the region S . The Bode plots of magnitude and
2) The constant-sensitivity loci
Compute ( , )
i
H s c c
S for i=0,1, 2 by substituting Eqs. (3.1)-(3.3) and (3.27) into (3.4) as
the followings: ( , ) 0 0 ( ) ( ) ( , )( ( ) ( ) ( , ) ( )) H s c c G c c G c G c c D s D s S N s c D s D s N s c N s = + , (3.31) ( , ) 1 1 ( ) ( ) ( , )( ( ) ( ) ( , ) ( )) H s c c G c c G c G c sc D s D s S N s c D s D s N s c N s = + , (3.32) and 2 ( , ) 2 2 ( ) ( ) ( , )( ( ) ( ) ( , ) ( )) H s c c G c c G c G c s c D s D s S N s c D s D s N s c N s = + . (3.33) Let c2 =2344. The constant-sensitivity loci in Fig. 3.13, are plotted in c0 −c1 plane from the solutions to the equality ( ) 01
H j i s j
c
S ω s
ω
= = , where s is a specified sensitivity 01 constant and i=0,1. Gain and phase boundary curves in Fig. 3.11 are plotted with the system
operating at the point A in the region S . If the specified sensitivity locus passes through the
shaded area as in Fig. 3.9, a point on the locus is chosen and the controller at this location in
0 1
c − plane is desired. The point c Q1 on the sensitivity locus with the constraint
0 1 ( ) ( ) 0.001 H j H j s j s j c c S ω S ω ω ω =
= = = is chosen for the controller with c0 =180.7,c1=18.83 and
2 2344
c = . The system at the point A in S has GM=4.13dB and PM=37.1○ . Its performance on stability has been improved.
Let c0 =9375. The solutions to the equality ( ) 12 H j i s j c S ω s ω = = , where i=1, 2, give a plot of the constant-sensitivity loci in c1−c2 plane, as shown in Fig. 3.14. Choose the point
2
Q in Fig. 3.14 with c1 =410 and c1 =6000 on the sensitivity locus 1 ( ) H j s j c S ω ω = = 2 ( ) 7 10 H j s j c S ω ω −
= = and the system operating at the point B in S has GM=6.08dB and PM=31○.
3.5 Concluding Remarks
This chapter introduces a new method on performance analysis and controller design by
frequency domain approach for a perturbed control system. Based on the parameter space
method and robust stability criteria, the performances of a perturbed vehicle control system
are analyzed in graphical portrayals. With the help of gain and phase boundary curves
resulting from the roots of the system characteristic polynomial equation, the GM and PM
have been obtained. In controller design, a methodology is proposed for portraying regions in
a selected controller coefficient plane so that the designed controller is to meet the specified
requirements on GM, PM and sensitivity. Simulation results demonstrate the objectives have
( , )
G s q
( )
C s
+
−
( )
s
δ
y s
( )
Fig. 3.1 The perturbed vehicle control system with uncertain parameter q .
+
j
ke
−
θ
C s
( )
G s q
( , )
−
( )
s
δ
y s
( )
8 10 12 14 16 18 20 22 24 26 15 20 25 30 35 40 45 q1(velocity m/s) q2 (m ass t ons) A (20,32) B(20,24) C(12,24) D(12,32)
The perturbed region
S
Fig. 3.3 The parameter domain region S in q1-q2 plane.
8 10 12 14 16 18 20 22 24 26 15 20 25 30 35 40 45 q1(velocity m/s) q2 (m ass tons) A (20,32) B(20,24) C(12,24) D(12,32)
The perturbed region
K= -4.3dB(GM)
K= -3.1dB
K= -6.7dB
S
8 10 12 14 16 18 20 22 24 26 15 20 25 30 35 40 45 q1(velocity m/s) q2( m ass t ons) A (20,32) B(20,24) C(12,24) D(12,32)
The perturbed region
phase=16 deg
phase=19.336 deg(PM)
phase=28 deg S
Fig. 3.5 Phase boundary curves by varying θ with PM=19.336○.
8 10 12 14 16 18 20 22 24 26 0. 0.6 0.7 0.8 0.9 1 1.1 1.2 15 20 25 30 35 40 u(road friction) v(velocity m/s) m( ma ss t o n s)
The perturbed region R
10 15 20 25 0 0.6 0.8 1 15 20 25 30 35 40 u(road friction) v(vvelocity m/s) m( ma ss t o n s) k= -3.74dB k= -4.3dB (GM) k= -6.7dB E F u=0.5 u=1 u=0.75
The perturbed region
R
Fig. 3.7 Gain boundary curves in 3D with by varying k with GM=-4.3dB.
10 12 14 16 18 20 22 24 26 0.6 0.8 1 15 20 25 30 35 40 u(road friction) v(velocity m/s) m( ma ss t o n s)
The perturbed region
u=1 u=0.75 u=0.5 phase=28 deg. phase=19.336deg (PM) phase=16 deg E F
R
Fig. 3.9 The controller coefficient region for GM≥3dB and PM≥300 as indicated in the shaded area in c0− plane with c1 c2 =2344.
Fig. 3.10 The controller coefficient region for GM≥3dB and PM≥300 as indicated in the shaded area in c1−c2 plane with c0 =9375
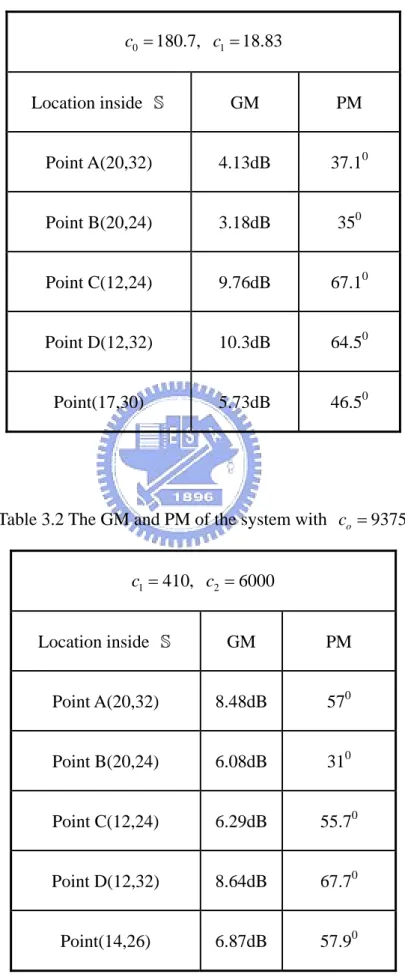
Table 3.1 The GM and PM of the system with c2 =2344 0 180.7, 1 18.83 c = c = Location inside S GM PM Point A(20,32) 4.13dB 37.10 Point B(20,24) 3.18dB 350 Point C(12,24) 9.76dB 67.10 Point D(12,32) 10.3dB 64.50 Point(17,30) 5.73dB 46.50
Table 3.2 The GM and PM of the system with co =9375
1 410, 2 6000 c = c = Location inside S GM PM Point A(20,32) 8.48dB 570 Point B(20,24) 6.08dB 310 Point C(12,24) 6.29dB 55.70 Point D(12,32) 8.64dB 67.70 Point(14,26) 6.87dB 57.90
100 101 102 -50 0 50 100 101 102 -250 -200 -150 -100 Mag(dB) Phase (deg) A A B B C C D D Frequency(rad/sec)
Fig. 3.11 Bode plots of magnitude and phase with c0 =180.7,c1 =18.83andc2 =2344 at four vertices of the perturbed region S .
100 101 102 -50 0 50 100 101 102 -300 -250 -200 -150 -100 Mag(dB) Phase (deg) D D C C B B A A Frequency(rad/sec)
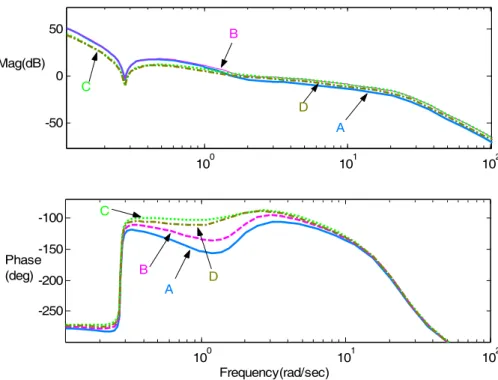
Fig. 3.12 Bode plots of magnitude and phase with c0 =9375,c1 =410 andc2 =6000 at four vertices of the perturbed region S .
140 150 160 170 180 190 200 210 220 230 240 16 18 20 22 24 26 28 30 c0 c1 o k=0dB PM=19.336 deg s=0.001 PM=40deg. k=6dB k=3dB Q1 PM=30 deg
Fig. 3.13 A chosen controller at the point Q1 with c0 =180.7,c1 =18.83 and c2 =2344
based on the control system at the vertex A (20, 32) of the perturbed parameter region S .
100 200 300 400 500 600 700 800 5600 5800 6000 6200 6400 6600 6800 c1 c2 o k=3dB k=0dB k=6dB PM=30 deg. PM=40 deg. S12=10E(-7) Q2
Fig. 3.14 A chosen controller at the point Q2 with c0 =9375,c1=410 and c2 =6000