國 立 交 通 大 學
機械工程學系碩士班
碩 士 論 文
縱-扭模態耦合之三角形超音波馬達
Longitudinal – Torsional Mode Coupled Triangular
Ultrasonic Motors
研 究 生 : 郇心慧
指導教授 : 尹慶中 博士
縱-扭模態耦合之三角形超音波馬達
Longitudinal – Torsional Mode Coupled Triangular Ultrasonic
Motors
研 究 生:郇心慧 Student:Hsin-Hui Hsun
指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國 立 交 通 大 學 機械工程學系碩士班
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering September 2013
Hsinchu, Taiwan, Republic of China
i
縱-扭模態耦合之三角形超音波馬達
研究生:郇心慧 指導教授:尹慶中博士 國立交通大學機械工程學系碩士班摘 要
本研究改良蔡慶芳學長設計之三角形超音波馬達,希望以不同方形 壓電片分別致振縱向模態與扭轉模態來驅動馬達,三角形馬達定子的三 頂點設為與轉子之接觸點,並在頂角接近底座處切割橫向孔縫,減損定 子的軸向剛性。定子的三個側面各黏貼三片方形壓電陶瓷材料,施予電 極固定相位差之交流電壓,以相同工作頻率、振幅激發定子的縱向與扭 轉共振模態。兩共振模態的耦合振動致使定子接觸點作橢圓軌跡運動, 定子與轉子間存在的摩擦力致使轉子轉動。調整輸入電壓的相位差,可 控制轉子轉動方向。本文採用有限元素分析軟體進行數值模擬,以三角 形定子水平孔縫長度與位置為主要設計參數,依據模態耦合與模態隔離 程度,找出可同時激發縱向與扭轉模態的幾何模型,分析馬達定子作動 時接觸點的運動軌跡。超音波馬達原型機的定子材質為鋁合金,轉子為 不銹鋼,進行馬達性能曲線測試,最大轉速為 59rpm,最大扭矩為 2.91N-cm。 關鍵字:超音波馬達、雙模態共振、扭矩轉速曲線ii
Longitudinal –Torsional Mode Coupled Triangular
Ultrasonic Motors
Student: Hsin-Hui Hsun Advisor: Dr. Ching-Chung Yin
Department of Mechanical Engineering National Chiao Tung University
ABSTRACT
This thesis presents an improvement of the triangular ultrasonic originally designed by Tsai. The longitudinal mode and torsional mode of the stator are excited to drive the rotor by distinct rectangular elements of PZT-4. The stator looks like a triangular tube machined with three horizontal slots in the apexes, which are set as contact points. The short tube is used to have a higher natural frequency for longitudinal mode than the torsional mode. Both longitudinal mode and torsional mode can have the same natural frequency if the axial stiffness is degraded by the horizontal slots. The PZT-4 element with segmented electrodes is adhered to each peripheral surface of the stator. The AC signals with constant phase difference are applied to the electrodes to excite both vibration modes. Every contact point experiences an elliptical trajectory in response to a harmonic excitation of the coupled modes, which are used to propel the ultrasonic motor through frictional force between the rotor and stator. The revolution direction of the rotor can be controlled by adjusting the phase difference of input signals. A finite element analysis code is used to calculate the resonant frequencies of the stator with various design
iii
parameters, including the length and position of the horizontal slots in the stator. In the probably optimal trial, both longitudinal and torsional modes can be simultaneously excited in a numerical model of the stator at the same frequency in accordance with modal separation and dual mode coupling theory. The trajectory of a contact point between the stator and rotor has been analyzed. The prototypes of the presented ultrasonic motors were fabricated and tested. The stator and rotor are made of aluminum alloy and stainless steel, respectively. The maximum measured revolution speed is 59 rpm without payload, and the maximum measured torque is 2.91 N-cm.
iv
誌 謝
在交大就讀研究所的時間內,感謝我的指導教授 尹慶中博士,包 容我許多的缺點,不厭其煩並細心的指導與照顧我,讓我得以順利完成 碩士論文並學習不只在專業知識上以及待人處世上的道理。感謝許世明 學長與游泰和學長分別在理論與實驗兩方面給我建議,協助我突破困難, 蔡慶芳學長教導我整體研究,林育丞學長協助我量測。 能完成這篇碩士論文取得碩士學位最要感謝的是我生命中最重要的 三位女士,一位是我的母親黃國珍,一位是我的乾姊廖小喬,一位是我 好友蕭涵云。謝謝妳們三位在延畢的這一年也是我人生心情最低潮、甚 至沒有動力繼續把研究完成時,持續的給我最大支持,鼓勵我勇敢,讓 我現在能繼續在這邊完成這份論文。 我的家人父親郇保羅、弟弟郇心源、姐姐郇心純、表姊黃瑋茹、林 柔孚與林小律、表姊夫山口一重、表妹黃東澐、孫思嘉與孫思芃、表弟 林暐、堂姊郇植惠、堂姊夫魏世忠、阿姨們、姨丈們、伯伯叔叔們、嬸 嬸們、外甥女山口麻織、外甥山口一皓、族狗林哈比…等,以及今年已 故的阿嬤陳玉英,亦在我求學時期給予我許多的建議與照顧,帶給我歡 笑,讓我感受到親情的溫暖。 中學至大學時期的密友黃姵瑋、蔡佩庭、朱羽萱、林剛毅、朱曉彤、 曾亭懿、吳麗雲、黃佳琪老師、鍾秀圓老師,成為我平時聊天、談心、 玩耍的好夥伴,成為我快樂的泉源。 研究所的麻吉兼運動好夥伴蔡怡芳、吳青芳、陳怡樺、陳鶴齡,讓 我在交大的日子得以維持好不容易瘦下來的身材並讓我在交大的日子不 孤單,有妳們真好。 實驗室的同學吳旻修、李劭遠、梁均帆,我們一起努力過,一起在 籃球場上熱血過,感謝在研究有困難時的大力協助,讓我們都能夠順利v 完成碩士論文。 最後感謝大學跟研究所都是我學妹的吳雨倩,課業跟生活上幫我很 多很多,假日回家時也幫我照顧我的刺蝟兒子,外面閃電交加時載我回 家。學弟黃仲平、何家豪、李柏勳以及學妹羅憶青、彭鈺原,你們在我 研究上幫我很多,祝你們研究順利、早日畢業。
vi
目 錄
中文摘要 ... i 英文摘要 ... ii 誌 謝 ... iv 目 錄 ... vi 表目錄 ... ix 圖目錄 ... x 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 研究背景 ... 2 1.3 文獻回顧 ... 4 1.3.1 駐波型超音波馬達 ... 4 1.3.2 行波型超音波馬達 ... 7 1.4 研究目的 ... 8 第二章 理論基礎 ... 9 2.1 壓電原理 ... 9 2.1.1 壓電材料的種類介紹 ... 9 2.1.2 壓電效應 ... 10 2.1.3 壓電材料的本構方程式 ... 11 2.1.4 壓電結構的運動方程式 ... 14 2.2 模態分析 ... 15 2.3 暫態分析 ... 15 2.4 超音波馬達致動原理 ... 17 第三章 數值模擬分析與結果 ... 18 3.1 三維有限元素之網格與元素型態 ... 18vii 3.1.1 馬達定子結構一 ... 19 3.1.2 馬達定子結構二 ... 19 3.2 模態分析 ... 20 3.2.1 共振模態辨別 ... 20 3.2.2 模態隔離與模態耦合 ... 20 3.2.2.1 定子結構一幾何尺寸對於特定模態共振頻率的影響與選 定之參數 ... 21 3.2.2.2 定子結構二幾何尺寸對於特定模態共振頻率的影響與選 定之參數 ... 22 3.2.3 共振模態收斂性 ... 23 3.3 三角形定子材料阻尼設定 ... 23 3.3.1 定子結構一阻尼比分析 ... 24 3.3.2 定子結構二阻尼比分析 ... 24 3.3.3 阻尼比選定 ... 24 3.4 三角形定子接觸點的振動位移 ... 25 3.4.1 定子結構一之時諧分析結果 ... 26 3.4.2 定子結構二之時諧分析結果 ... 26 3.5 暫態響應分析 ... 26 3.5.1 定子結構一之暫態分析結果 ... 27 3.5.2 定子結構二之暫態分析結果 ... 27 3.5.3 暫態分析與時諧分析振幅誤差來源 ... 28 第四章 實驗量測與結果討論 ... 29 4.1 馬達原型機製作 ... 29 4.2 馬達定子共振頻率量測 ... 29 4.2.1 量測架構與量測參考點 ... 29
viii 4.2.2 馬達定子共振頻率量測結果 ... 30 4.2.3 共振頻率量測結果與數值分析誤差來源分析... 30 4.3 馬達性能曲線量測架構 ... 31 4.4 馬達定子結構二性能曲線量測結果 ... 31 4.4.1 馬達轉速量測結果 ... 31 4.4.2 馬達扭矩量測結果 ... 33 4.4.3 扭矩與轉速性能曲線 ... 34 第五章 結論與未來展望 ... 35 5.1 數值分析結論 ... 35 5.1.1 結構一數值分析總結 ... 36 5.1.2 結構二數值分析總結 ... 36 5.1.3 數值分析總結 ... 37 5.2 實驗量測結果討論 ... 37 5.2.1 雷射督卜勒測振儀量測結果與討論 ... 37 5.2.2 馬達性能量測結果與討論 ... 37 5.3 實驗誤差來源討論 ... 38 5.4 未來展望 ... 38 參考文獻 ... 39 附 表 ... 43 附 圖 ... 49
ix
表目錄
表 1 參考文獻提出之超音波馬達性能比較 ... 43 表 2 鋁合金 T-6061 的材料係數 ... 44 表 3 壓電陶瓷 PZT-4 的材料係數[31] ... 44 表 4 完整三角形結構之前 20 組模態振形,L=40mm、H=12mm、 t=2.5mm ... 45 表 5 定子結構一阻尼比 為 0.4%~0.8%時時諧分析與暫態分析 X 方向 位移響應比較 ... 46 表 6 定子結構二阻尼比 為 0.4%~0.8%時時諧分析與暫態分析 X 方向 位移響應比較 ... 47 表 7 定子結構一與定子結構二之時諧分析結果、暫態響應分析結果與 蔡慶芳[14]之比較 ... 48x
圖目錄
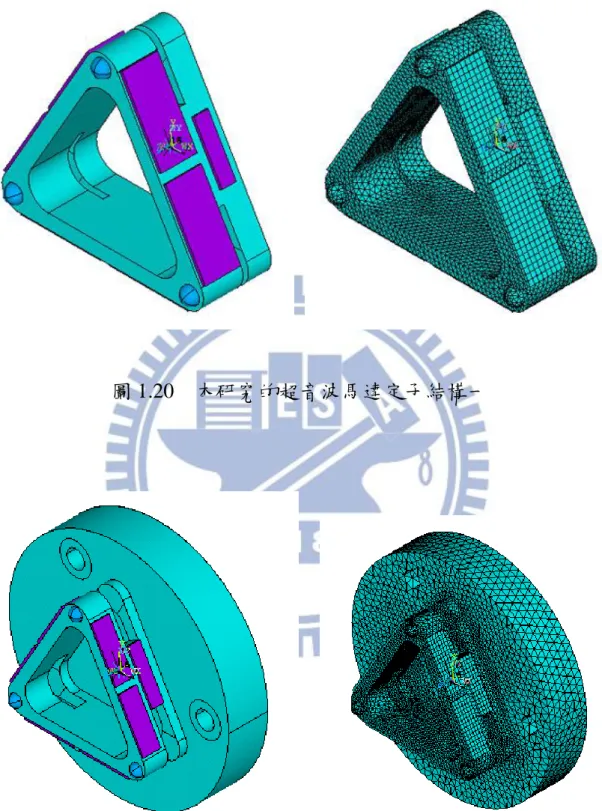
圖 1.1 Barth [1]的超音波馬達 ... 49 圖 1.2 Sashida [4]的駐波式超音波馬達 ... 49 圖 1.3 駐波式超音波馬達 [6]的驅動原理與構造示意圖 ... 50 圖 1.4 行波式超音波馬達 [5]的驅動原理與構造示意圖 ... 50 圖 1.5 Toyoda 與 Murano [7]的線性超音波馬達 ... 51 圖 1.6 Li and Zhao [8]的線性超音波馬達 ... 51 圖 1.7 Hemsel 與 Wallaschek [9]的線性超音波馬達 ... 52 圖 1.8 Juang 與 hardtke [10]的超音波馬達 ... 52 圖 1.9 Vyshnevskyy 與 Kovalev [11]的超音波馬達 ... 53 圖 1.10 Minghui et al [12]的超音波馬達 ... 53 圖 1.11 Shi 與 Zhao [13]的線性馬達驅動示意圖 ... 54 圖 1.12 蔡慶芳[14]的三角形超音波馬達 ... 54 圖 1.13 Lu et al [15]的超音波馬達 ... 55 圖 1.14 Hou et al [16]的超音波馬達 ... 55 圖 1.15 Iula et al [17]的超音波馬達 ... 56 圖 1.16 Chen et al [18]的超音波馬達 ... 56 圖 1.17 Liu et al [19]的超音波馬達 ... 57 圖 1.18 游泰和[20]的超音波馬達 ... 57 圖 1.19 各參考文獻設計之超音波馬達性能比較圖 ... 58 圖 1.20 本研究的超音波馬達定子結構一 ... 59 圖 1.21 本研究的超音波馬達定子結構二 ... 59 圖 2.1 正壓電效應 ... 60 圖 2.2 逆壓電效應 ... 60 圖 2.3 三角形定子結構一之電極配置 ... 61xi 圖 2.4 三角形定子結構二之電極配置 ... 61 圖 2.5 馬達定子結構一之作動方式 ... 62 圖 2.6 馬達定子結構二之作動方式 ... 62 圖 2.7 參考點於不同電壓相位差的運動軌跡 ... 63 圖 3.1 定子結構一模型的幾何尺寸參數 ... 64 圖 3.2 定子結構一的有限元素網格 ... 64 圖 3.3 定子結構二模型的幾何尺寸參數 ... 65 圖 3.4 定子結構二的有限元素網格 ... 65 圖 3.5 定子結構一於不同水平孔縫與定子上緣距離下的共振頻率分佈 (L=40mm、RO=3mm、RI=3.5mm、t=2mm、b=2mm、RH=1mm、 a=13mm) ... 66 圖 3.6 定子結構一於不同水平孔縫與定子下緣距離下的共振頻率分佈 (L=40mm、RO=3mm、RI=3.5mm、t=2mm、h=7mm、RH=1mm、 a=13mm) ... 67 圖 3.7 定子結構一於不同厚度下的共振頻率分佈(L=40mm、RO=3mm、 RI=3.5mm、b=4mm、h=7mm、RH=1mm、a=13mm) ... 68 圖 3.8 定子結構一於不同水平孔縫長度下的共振頻率分佈(L=40mm、 RO=3mm、RI=3.5mm、b=4mm、h=7mm、RH=1mm、t=2.5mm) ... 69 圖 3.9 定子結構一模型之優化尺寸 ... 70 圖 3.10 定子結構一之雙模態耦合圖,(a)頻率為 23.89kHz (屬縱向 模態),(b)頻率為 23.926kHz (屬扭轉模態) ... 70 圖 3.11 定 子 結 構 二 於 不 同 厚 度 下 的 共 振 頻 率 分 佈 ( L=40mm、
xii RO=3.5mm、RI=3.5mm、b=3mm、h=6.3mm、RH=3mm、a=12mm) ... 71 圖 3.12 定子結構二於不同水平孔縫與定子上緣距離下的共振頻率分 佈(L=40mm、RO=3.5mm、RI=3.5mm、t=2.5mm、b=3mm、 RH=3mm、a=12mm)... 72 圖 3.13 定子結構二於不同水平孔縫與定子下緣距離下的共振頻率分 佈(L=40mm、RO=3.5mm、RI=3.5mm、t=2.5mm、h=5.8mm、 RH=3mm、a=12mm)... 73 圖 3.14 定子結構二於不同外導角下的共振頻率分佈(L=40mm、 RI=3.5mm、b=2mm、h=5.8mm、RH=3mm、t=2.5mm、a=12mm) ... 74 圖 3.15 定子結構二於不同水平孔縫長度下的共振頻率分佈(L=40mm、 RO=3.5mm、RI=3.5mm、b=2mm、h=5.8mm、RH=3mm、t=2.5mm) ... 75 圖 3.16 定子結構二模型之優化尺寸 ... 76 圖 3.17 定子結構二之雙模態耦合圖,(a)頻率為 22.181kHz (屬扭 轉模態),(b)頻率為 22.215kHz (屬縱向模態) ... 76 圖 3.18 不同元素數量分析定子結構一之自然頻率分佈(L=40mm、 RO=3mm、RI=3.5mm、b=4mm、h=7mm、RH=1mm、t=2.5mm) ... 77 圖 3.19 不同元素數量分析定子結構二之自然頻率分佈(L=40mm、 RO=3.5mm、RI=3.5mm、b=2mm、h=5.8mm、RH=3mm、t=2.5mm)
xiii ... 78 圖 3.20 依據第一扭轉模態與側向彎曲模態建立定子結構一的阻尼比 曲線 ... 79 圖 3.21 依據第一扭轉模態與第二扭轉模態建立定子結構一的阻尼比 曲線 ... 79 圖 3.22 定子結構一阻尼比 0.4%時諧分析響應圖 ... 80 圖 3.23 定子結構一阻尼比 0.4%暫態分析位移響應圖 ... 81 圖 3.24 定子結構一阻尼比 0.5%時諧分析響應圖 ... 82 圖 3.25 定子結構一阻尼比 0.5%時暫態分析位移響應圖 ... 83 圖 3.26 定子結構一阻尼比 0.6%時諧分析響應圖 ... 84 圖 3.27 定子結構一阻尼比 0.6%暫態分析位移響應圖 ... 85 圖 3.28 定子結構一阻尼比 0.7%時諧分析響應圖 ... 86 圖 3.29 定子結構一阻尼比 0.7%暫態分析位移響應圖 ... 87 圖 3.30 定子結構一阻尼比 0.8%時諧分析響應圖 ... 88 圖 3.31 定子結構一阻尼比 0.8%暫態分析位移響應圖 ... 89 圖 3.32 依據第一扭轉模態與側向彎曲模態建立定子結構二的阻尼比 曲線 ... 90 圖 3.33 依據第一扭轉模態與第二扭轉模態建立定子結構二的阻尼比 曲線 ... 90 圖 3.34 定子結構二阻尼比 0.4%時諧分析響應圖 ... 91 圖 3.35 定子結構二阻尼比 0.4%暫態分析位移響應圖 ... 92 圖 3.36 定子結構二阻尼比 0.5%時諧分析響應圖 ... 93 圖 3.37 定子結構二阻尼比 0.5%暫態分析位移響應圖 ... 94 圖 3.38 定子結構二阻尼比 0.6%時諧分析響應圖 ... 95 圖 3.39 定子結構二阻尼比 0.6%暫態分析位移響應圖 ... 96
xiv 圖 3.40 定子結構二阻尼比 0.7%時諧分析響應圖 ... 97 圖 3.41 定子結構二阻尼比 0.7%暫態分析位移響應圖 ... 98 圖 3.42 定子結構二阻尼比 0.8%時諧分析響應圖 ... 99 圖 3.43 定子結構二阻尼比 0.8%暫態分析位移響應圖 ... 100 圖 3.44 三角形超音波馬達定子結構一接觸點位移的頻率響應函數 .. 101 圖 3.45 三角形超音波馬達定子結構二接觸點位移的頻率響應函數 .. 101 圖 3.46 三角形超音波馬達定子結構一接觸點電壓驅動 150 週期後的 位移響應,(a)X 方向位移響,(b)Y 方向位移響應,(c)Z 方 向位移響應 ... 102 圖 3.47 超音波馬達定子結構一接觸點之參考座標及運動軌跡... 103 圖 3.48 三角形超音波馬達定子結構二接觸點電壓驅動 150 週期後的 位移響應,(a)X 方向位移響,(b)Y 方向位移響應,(c)Z 方 向位移響應 ... 104 圖 3.49 超音波馬達定子結構二接觸點之參考座標及運動軌跡... 105 圖 4.1 實驗材料(a)壓電材料,(b)導電銀膠 CW2400 ... 106 圖 4.2 實驗輔助工具(a)壓電片黏貼輔助器,(b)壓克力夾具 .... 107 圖 4.3 超音波馬達定子原型機 ... 108 圖 4.4 雷射都卜勒測振儀量測定子結構一馬達定子共振頻率示意圖 109 圖 4.5 雷射都卜勒測振儀量測定子結構二馬達定子共振頻率示意圖 110 圖 4.6 LDV 量測馬達定子結構一參考點 a 的振幅頻率響應曲線 ... 111 圖 4.7 LDV 量測馬達定子結構一參考點 b 的振幅頻率響應曲線 ... 111 圖 4.8 LDV 量測馬達定子結構二的振幅頻率響應曲線 ... 114 圖 4.9 超音波馬達之扭矩與轉速性能量測,實驗架構示意圖... 115 圖 4.10 超音波馬達之驅動頻率與轉速曲線圖 ... 116 圖 4.11 超音波馬達之驅動電壓與轉速曲線圖 ... 116
xv
圖 4.12 超音波馬達之訊號相位差與轉速曲線圖 ... 119 圖 4.13 超音波馬達之驅動電壓與扭矩曲線圖 ... 120 圖 4.14 超音波馬達之扭矩與轉速曲線圖 ... 120
1
第一章 緒論
1.1 前言
機電整合乃為現今科技產業的發展趨勢,馬達於眾多技術應用領域 中扮演著重要的腳色,雖然傳統的電磁馬達(electromagnetic motor)已 擁有一百餘年的發展歷,仍有許多困難尚待克服,例如 : 外部磁場干擾、 馬達效能隨體積大小變化等問題,因此,超音波馬達(ultrasonic motor) 為產業界帶來一股新希望。 超音波馬達又稱為壓電馬達(piezoelectric motor),乃一種將壓電陶 瓷材料黏貼於彈性體結構,利用壓電材料的逆壓電效應,以高頻交流電 壓激發特定模態的機械振動,使得彈性體結構表面的粒子依循橢圓軌跡 作週期運動,並藉著摩擦力驅動馬達轉子作旋轉運動。 超音波馬達有著許多優點,如:振動位移量小,能執行高精度的定 位控制;振動頻率高於人類聽力範圍,可使用於需要低噪音的工作場合, 這些優點使得超音波馬達在部分領域中漸漸取代傳統電磁馬達。超音波 馬達最大缺點乃馬達透過摩擦方式驅動方式,在運轉過程中,接觸區域 會因磨耗而變得光滑,造成接觸區域的摩擦力減小進而使得馬達扭矩性 能降低。儘管許多減少磨耗的設計及耐磨性佳的材料已被改良於超音波 馬達上,超音波馬達使用的時限仍較傳統電磁馬達短,為此,超音波馬 達通常應用於特殊的領域。 超音波馬達發展數十年間,已被廣泛運用於相機、手錶、醫療設備、 航太工業、精密定位設備及機器人等機密機械上。由於其具有體積小、 重量輕且結構簡單,不受電磁干擾,所產生的扭矩也比同尺寸的電磁馬 達更大等優點。因此如何在現有的技術下發展出性能更好、體積更小的 超音波馬達成為現今發展的重點。2
1.2 研究背景
Barth [1]於 1973 年提出駐波式超音波馬達,開始了超音波馬達的開 展史,其構造如圖 1.1 所示,利用形似兩觸角的壓電振盪子軸向變形致使 轉子被推動而旋轉,藉由選擇驅動的振盪子,可控制馬達轉向,此結構 存在磨耗、溫度上升、穩定性等缺點,因此沒有付諸實際應用。 Lavrinenko et al [2]於 1796 年,提出多種不同結構的超音波馬達,並 歸納出超音波馬達具有結構簡單、高扭矩、低轉速、高輸出功率及精密 定位等優點。 Vasiliev et al [3]於 1979 年,藉由藍杰文(Langevin)振盪子的超音 波換能器致振產生縱向振動,驅動使得轉子旋轉,但由於無法維持固定 振幅及溫度、磨耗等問題影響,故無適用的場合。 Sashida 與 Kenjo [4]於 1982 年,提出一種尖端為楔形的駐波式超音 波馬達,如圖 1.2 所示,以藍杰文振盪子作為驅動源,提高振盪子的位移 量,振盪子尖端以橢圓軌跡運動,間歇性的推動轉子,使之旋轉,能有 效地改善振盪子與轉子間因滑動而造成的能量損耗。此超音波馬達具備 低轉速、高扭矩、高效能等優點,但轉子旋轉方向無法變換為此馬達的 缺陷。 1982 年,Sashida 與 Kenjo [5]發展出一種行波式環型超音波馬達。將 具有兩組極化方向相反的壓電圓環,黏貼於一具有梳齒狀放大機構的金 屬圓環下方,藉由分別輸入兩組相同頻率、振幅相等、具 90 度相位差的 正弦波電壓,激發出單方向轉動的行波。將轉子放置於金屬圓環上方, 利用兩者間的摩擦力使轉子旋轉,並由改變相位差可控制馬達轉向。同 時提出於轉子與定子之間黏貼一層耐磨材料,可改善金屬圓環與轉子之 間磨耗的問題。此馬達首先應用在照相機的自動對焦系統中,是第一個 達到商業應用價值的超音波馬達,吸引了許多學者繼續投入研究。3 超音波馬達發展至今已有許多類型陸續被提出,依據轉子與定子的 接觸型式和定子被激發波式可分為兩類。第一類為駐波(standing wave) 式超音波馬達,馬達定子以反復方式運動,接觸點作橢圓軌跡運動,使 定子與轉子做間歇式的接觸,再藉由兩者之間的摩擦力推動轉子旋轉。 Ueha 與 Tomikawa[6]於 1993 年提出之一種駐波式圓柱型超音波馬達, 如圖 1.3 所示,馬達於階段 1 時,縱向振動位移為最大正值,扭轉速度向 右,使得定子伸長與轉子接觸,並將切線方向振動傳至轉子使轉子旋轉。 於階段 2 時,縱向振動位移為零,轉子與定子分開,此時切線方向振動 位移為最大值,速度為零。於階段 3 時,縱向振動位移為最大負值,使 定子縱向長度縮短,同時切線方向振動位移為零,扭轉速度向左並開始 反回到原點。於階段 4 時,縱向振動位移為零,切線方向振動位移為最 大負值,速度為零,此時圓柱體保持原來體積,未與轉子接觸。如此週 期運動,便可致使馬達作單一方向旋轉運動,此類型作動方式稱為雙模 態耦合振動的超音波馬達。 第二類為行波(traveling wave)式超音波馬達,如圖 1.4 所示,於壓 電體上設置兩組電極,電極產生的電場與壓電體的極化方向相同或反向, 構成兩組換能器,藉由驅動兩組相位差 90 度但頻率與振幅相等的正弦波 訊號,使得換能器激振出的共振模態相互干涉而成一行進波。此類馬達 的定子與轉子之間保持接觸,接觸點的運動軌跡為一橢圓,利用摩擦力 驅動轉子使之旋轉。行波式馬達與駐波式馬達不同之處在於前者的定子 表面接觸點非固定,轉子運動的方向與行進波粒子運動方向相同。駐波 式超音波馬達的成本低、高效能,理論值可達 98%。行波式超音波馬達 具轉向容易控制、接觸磨耗小等優點,但行進波作動時沒有節點存在, 轉子的固定點需遠離轉子與定子的接觸面,導致馬達運轉效率降低。
4
1.3 文獻回顧
1.3.1 駐波型超音波馬達
Toyoda 與 Murano[7]於 1991 年設計的線性超音波馬達,如圖 1.5 所 示,於一個兩端固定的梁上方設置兩突起,兩者之間有一積層式壓電材 料(multilayered piezoelectric material),控制兩突起作水平方向的振動。 梁下方黏貼兩片壓電材料,激振梁產生彎曲模態,使梁上方的兩突起作 垂直方向的運動。激振電壓相位差 90 度,使水平與垂直兩方向模態耦合, 兩突起尖端呈橢圓形軌跡運動。 1998 年,Li 與 Zhao[8]提出的線性超音波馬達如圖 1.6 所示,以相 同的共振頻率及相位差 90 度的電壓激振上方圓形壓電片組與下方方形壓 電片組,結構的縱向模態與第三彎曲模態耦合,使振動子端點作橢圓軌 跡運動,改變相位的領先與落後,可控制滑動平台的運動方向。 2000 年,Hemsel 與 Wallaschek[9]設計一線性超音波馬達,如圖 1.7 所示,將結構之縱向與彎曲振動模態疊加,使接觸端點作橢圓軌跡運動。 將支撐點設計在振動的節點上,雙相輸出的設計提高馬達的推力與效率 用於大範圍的線性定位應用。由於振動子的運動方式似划槳(rowing), 且馬達為帕德柏恩大學學者所研發,命名為帕德柏恩划槳馬達(Paderborn rowing motor)。 2001 年,Juang 與 Hardtke[10]設計一超音波馬達,如圖 1.8 所示, 驅動定子圓盤上之壓電薄膜,使得圓盤邊緣做橢圓軌跡運動,定子底座 為一水平運動之平台,平台與定子圓盤間以三個夾角為(120°-90°-150°) 的圓柱作為固定點,利用定子與轉子之間的摩擦力,使轉子轉動。藉由 建立電路模型預測超音波馬達性能,並與實驗得到的結果作比較。 德國工程師 Vyshnevskyy 等人[11]於 2005 年發表一駐波式超音波馬 達,如圖 1.9 所示,馬達定子為壓電圓管,驅動壓電圓管使之產生軸向與
5 橫向的耦合共振模態,並以壓電圓管脊緣的質點為接觸點做橢圓形軌跡 運動。同時也發表一行波式超音波馬達,給予 15 Vrms電壓驅動相位分別 為 0°、120°、360°的壓電材料即可獲得高效率的輸出性能。 Minghui 等人[12]於 2008 年提出一駐波式超音波馬達,如圖 1.10 所 示,馬達定子為四角柱結構,四面柱壁皆黏貼一壓電材料,每一壓電片 各有五個電極,上表面四個下表面一個。激振壓電片使得定子結構產生 軸向與彎曲雙耦合模態。接觸點位於定子結構體的頂端,藉由雙模態耦 合共振使接觸點做橢圓形軌跡運動,致使轉子旋轉。此超音波馬達將朝 微小化發展,使之得以應用於微小裝置內。 Shi 與 Zhao[13]曾於 2011 年提出一駐波式之線性超音波馬達,如圖 1.11 所示,滑座部分為一短梁結構與短梁上側的三角形結構所組成,梁 的下側黏貼兩片壓電材料,在壓電片之表面電極施加兩組相位差 90 度的 交流電壓,激發短梁結構的兩組面內共振模態,使得第一縱向模態與第 二彎曲模態耦合,三角形的頂點作橢圓形軌跡運動,藉由摩擦力帶動滑 座運動。再以雙模態耦合的最小頻率差為目標函數,經由最佳化設計決 定定子的幾何參數,模擬三角形結構之底角角度對接觸點 X 與 Y 方向位 移的影響經實驗證實,此底角角度影響了馬達的性能,當角度增加時, 馬達的無負載下之轉速隨之增加,但最大扭力卻隨之減少。 2011 年,蔡慶芳[14]研發一雙模態耦合三角形超音波馬達,如圖 1.12 所示,三角形封閉結構有助於提升結構扭轉之頻率,以便與縱向模態耦 合。黏貼的壓電片選用方形壓電片,因材料性質穩定、國內取得容易、 易於加工、成本低廉,取代以往使用的壓電圓管在製作時易發生異向性 燒結的問題,避免定子與壓電圓管接合時產生偏心誤差,影響馬達整體 性能。馬達定子由鋁合金所製成,在三角形各邊中點的上端或三角形頂 點設計一突起,分別在三角形的側邊及頂角處切割橫向細長孔縫。定子
6 的三邊黏貼方形壓電陶瓷,電極分割成兩塊區域,施加相位差為 90 度的 兩組交流電壓,以相同工作頻率激振定子的基本縱向模態與扭轉模態, 使其耦合振動。定子突起點呈橢圓形軌跡運動,定子與轉子間的摩擦力 驅使轉子旋轉,調整輸入電壓相位差的領先與落後,可控制轉子的轉動 方向。當轉子未施加預壓力時,馬達的啟動電壓為 80Vp-p,在 400Vp-p驅 動電壓作用下,馬達最大轉速可達 142rpm。 Lu 等人[15]於 2012 年發表了一多自由度超音波馬達,如圖 1.13 所示, 馬達結構為一球體上下被雙定子與壓電片做三明治形夾住,依據選用不 同的震動模態組合可以分別繞於座標三軸作旋轉運動,例如:欲繞 X 軸 與 Y 軸旋轉時,則選用 R1-mode 與 B11-mode。固定壓電圓環尺寸,利用 調整定子的厚度與外徑達到模態耦合的目的。並製造馬達原型機,量測 上定子與下定子的共振模態,確認與模擬的誤差以及研究可行性。未來 要考量的除了結構體的製造外還有負責給予預應力的彈簧的彈性係數、 穩定度及結構體材料的選用,以減少磨耗。 2012 年,Hou[16]等人進行不同壓電材質對於同一結構體接觸點位移 影響的研究,如圖 1.14 所示,利用三 BEAM 結構,端點都放置壓電材料, 輸入 90 與 180 相位差的訊號,使得接觸點做橢圓形軌跡運動。在此選用 四種不同的壓電材料(PZT4、PMNPT、PZNPT1、PZNTP2)進行模擬結 果比較,為了達到模態耦合目的,因此不同的壓電材料會使結構的三個 BEAM 有不同的尺寸組合,再分別進行時諧分析與暫態響應分析。由模 擬結果可知,於 X 方向,PZNPT1 以及 PZNPT2 的位移遠大於 PZT4,分 別增加 343%與 354%,於 Z 方向 PZNPT1 位移表現最好,較 PZT4 增加 643%,PZNTP2 則有 207%。驗證了許多超音波裝置的壓電材料已從以往 的 PZT 換成 PZTPT 與 PMNPT 的優勢。
7 1.3.2 行波型超音波馬達 2006 年,Iula 等人[17]設計一高扭矩行波式超音波馬達,如圖 1.15 所示,利用兩支藍杰文換能器雙相驅動馬達,以彈簧為預應力的來源, 實驗所得最大轉速為 300(rpm),最大扭矩為 0.8(N-m)。未來將設計較 輕量化之結構、改變預應力給予方式、於轉子及定子間增加摩擦層、增 加蘭杰文換能器數量,以最佳化馬達及增加馬達的最大扭矩。 Chen 等人[18]於 2010 年設計一駐波式超音波馬達,如圖 1.16 所示, 於輪框狀定子周圍上下層 64 個巢中皆鑲埋入壓電疊層,利用巢與壓電疊 層的尺寸公差產生轉子與定子之間所需之預應力,藉由交互給予 90 度相 差之交流電驅動壓電片,使轉子轉動。由於黏膠層表面於剪應力產生, 因此在不良的環境溫度下馬達仍有良好的耐久性。 2011 年,Liu 等人[19]發表一行波式超音波馬達,如圖 1.17 所示, 於輪框狀定子外圍 20 個梯形巢中鑲入壓電材料,利用梯形巢與楔形塊尺 寸誤差給予預應力,相間的驅動相位差為 90 度的交流電驅動壓電片致振 定子結構,讓轉子轉動。 游泰和[20]於 2012 年研發一圓柱楔形超音波馬達,如圖 1.18 所示, 以壓電圓管致動楔形體定子,採用高階的周向模態來增加定子與轉子間 的接觸點,改善傳統圓柱型超音波馬達採用梁模態驅動方式所造成轉子 晃動、扭矩小的缺點。馬達最大轉速為 225(rpm),最大扭矩為 15.7 (mN-m)。 各文獻所設計之超音波馬達性能比較如表 1 及圖 1.19 示,可看出多 數的超音波馬達擁有高轉速但卻無法有高扭矩的表現,有高扭矩性能卻 無法表現出高轉速,比較表內綜合表現較佳的為 2009 年由 Oh[25]等人設 計出的超音波馬達,轉速可達 140(rpm),扭矩可達 1.8 (N-m)。
8
1.4 研究目的
本實驗室研發超音波馬達已多年,近年多發展行波式超音波馬達, 行波式超音波馬達之致動器使用壓電圓管或壓電圓環,於製作時易發生 燒結、極化不均以及製作價格昂貴等問題。 2010 年,蔡慶芳[14]學長設計三種三角形超音波馬達,以三角形定 子三個接觸點與轉子接觸,以相同振幅、相同工作頻率、相位差 90 度之 交流電驅動定子的基本縱向模態與第一扭轉模態,使其耦合振動,並使 接觸點作橢圓線軌跡運動,轉子因定子與轉子間的摩擦力驅動。致動器 使用方形壓電片,有效的改善壓電圓環製作時所產生的問題。 本研究預期改良蔡慶芳學長的超音波馬達,設計出一超音波馬達能 藉由不同方形壓電片,分別激振出縱向共振模態與扭轉共振模態,提升 馬達的性能。1.5 內容簡述
本論文共分成五章,第一章為研究背景與動機、文獻回顧及論文研 究目的。第二章為理論基礎,文中介紹壓電效應、壓電材料的力學行為、 電性,並說明本研究之超音波馬達的工作原理。第三章應用套裝軟體 ANSYS 進行超音波馬達的模態分析、時諧分析、暫態分析,以三角形馬 達定子的水平孔縫長度、位置為主要設計參數,來探討定子縱向與扭轉 模態耦合的頻率響應變化及模態隔離的最佳化參數;計算定子接觸點的 位移響應與運動軌跡。第四章為實驗結果,於文中探討實驗所得之馬達 性能曲線。第五章為本研究的結論及未來展望。9
第二章 理論基礎
2.1 壓電原理
第二章首先介紹壓電材料的種類與其特質,並藉由壓電材料的本構 方程式與運動方程式說明壓電效應引致的振動與電性特性,接著介紹在 數值模擬分析時,結構振動的模態分析與暫態分析所運用的原理,最後 說明本論文研究的超音波馬達的作動原理。 2.1.1 壓電材料的種類介紹 西元 1880 年,居里兄弟發現電氣石具有將機械能與電能互換的壓電 效應(piezoelectric effect),並展開了壓電材料的研究。因為晶格內原子 間的特殊排列方式,使材料的應力場與電場互相耦合,因此得以產生壓 電效應。 具 壓 電 效 應 的 材 料 大 致 上 可 分 為 五 大 類 : 一 、 單 晶 類 ( single crystalline),如:石英、羅德鹽、電氣石、鈮酸鋰、鉭酸鋰。二、薄膜類 (thin film),如:氮化鋁、氧化鋅等。三、高分子聚合物(polymer),例 如:聚偏二氟乙烯(vinylidene fluoride,PVDF)等。四、陶瓷(ceramics), 如:鈦酸鋇(BaTiO3)、鋯鈦酸鉛(lead zirconate titanate,PZT)等。五、 複合材料(composite materials),如:AFC(active fiber composites)等。 不同的壓電材料有著不同的優點與缺點,例如:單晶類材料具良好 的溫度特性,但製造需仰賴特殊的晶體成長(crystal growth)技術,壓電 特性易受切面影響,也易因接觸空氣中的濕氣而潮解,失去壓電性。薄 膜類材料製造需要於不同真空條件中進行,不同真空條件會產生不同的 材料特性。高分子類材料性質柔軟,可以拉伸成非常薄的元件,但壓電 常數小,需極高的極化電場。陶瓷類材料活性安定,可耐酸鹼,並製成10 任何形狀,居里溫度高,但其與高分子聚合物、複合材料一樣,於製造 過程中需要高壓極化處理,但其極化電場強度較高分子聚合物與壓電複 合材料低甚多。 壓電多晶體又稱壓電陶瓷,最早是在鈦酸鋇上發現的,具備高工作 溫度(居里溫度 120℃左右)、高機械強度、加工容易且成本低廉等優點, 乃目前工業應用最廣泛且實用性最高的壓電材料。鋯鈦酸鉛為壓電陶瓷 的代表,具有優異的介電常數及機電耦合係數,化學性質穩定,操作溫 度範圍大且製造容易,故成為壓電材料應用的首選。因此本研究採用壓 電陶瓷材料 PZT-4 作為超音波馬達致動器。 2.1.2 壓電效應
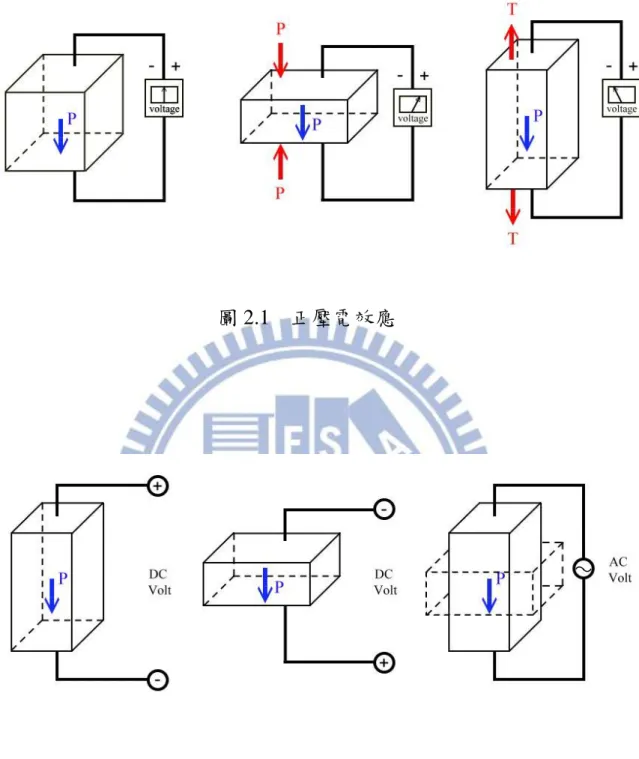
壓電效應包含正壓電效應(direct piezoelectric effect)及逆壓電效應 (converse piezoelectric effect)。居里兄弟於西元 1881 年以實驗證明逆壓 電效應,並得出正逆壓電常數。對壓電材料施以物理壓力時,材料體內 的電偶極矩會因壓縮而變短,因此在壓電材料相對的金屬電極表面產生 等量的正負電荷,抵抗電偶極矩的變化。參考圖 2.1 所示,當一壓電材料 承受機械應力時,材料體兩端產生一組與應力大小成正比例的電荷量, 當應力作用的方向相反時,電荷的極性也隨之相反,稱為機械能轉換為 電能的正壓電效應。如圖 2.2 所示,壓電材料極化方向的兩端承受直流電 場時,材料的變形會隨著電場的大小而改變,當電場的方向相反時,壓 電材料的變形方向亦隨之反向,此為電能轉換為機械能的逆壓電效應。 若施加交流電壓時,材料的變形會隨著輸入的電壓頻率產生週期性振盪, 本研究之超音波馬達即運用此原理致動。
11 2.1.3 壓電材料的本構方程式 壓電材料的機械能與電能互相耦合,本構方程式(constitutive equation) 包括機械特性與電氣特性。對非壓電材料而言,物體承受機械應力 T 時, 會產生機械應變S ,其應力應變的關係為 S = s T T = c S
(2.1)
此處, s 為彈性柔度矩陣(matrix of elastic compliance),c 為彈性剛度矩 陣(matrix of elastic stiffness)。
在
介電材料兩端施加電場E,材料內部會產生電位移D,兩者的關 係為 D ε E E β D(2.2)
此處,ε 為介電常數矩陣(matrix of dielectric constant)或稱誘電常數矩
陣 ( matrix of permeability ), β 為 反 誘 電 常 數 矩 陣 ( matrix of impermeability)。 壓電材料通常為非等向性材料,不只單獨存在應力、應變關係,同 時具備電場與電位移的關係,兩者互相耦合,其本構方程式(constitutive equation)必須同時考慮彈性係數、壓電係數、介電係數三部分。壓電材 料的本構方程式涉及的變數有四組,其中兩組為機械彈性量,即為應力Τ 與應變S ,另外兩組為壓電及介電量,即為電場E與電位移D或稱電通量 密度。依所選擇的自變數及因變數的不同,壓電方程式有 d、g、e 及 h 四種不同的型態,本文採選 e 型態矩陣式表示壓電材料的本構方程式,
12 E T S T = c S e E D = e S + ε E
(2.3) 其中,Τ、S 為應力張量與應變張量矩陣,D為電位移向量矩陣,E為電 場向量, E
c 是固定電場條件下的彈性剛度矩陣(matrix of elastic stiffness),
T
e 為壓電常數矩陣的轉置矩陣(transport matrix), e 是壓電常數矩陣
(matrix of piezoelectric constants), ε 為固定應變(constant strain)條S 件下的介電常數矩陣(matrix of dielectric constants)。
應力與應變為二階對稱張量,電場與電位移為向量。壓電參數代表 應力與電場或應變與電位移之間的關係,為三階張量。彈性勁度表示應 力與應變兩個二階張量間的關係,為四階張量。介電常數表示電場與電 位移兩個向量關係,為二階張量。機械應力及應變都包括三個正向分量 與三個剪向分量,電場及電位移則包括三個座標分量。(2.3)式可以指標 記號(index notation)改寫為 k S ij kl ikl i k kil kl ijkl ij E S e D E e S c T (2.4) 壓電材料受電場或機械力作用時,其本構方程式依據 IEEE Standard on Piezoelectricity [28]可表示如下: 1 11 12 13 14 15 16 11 21 31 2 21 22 23 24 25 26 12 22 32 3 31 32 33 34 35 36 13 23 33 4 41 42 43 44 45 46 14 24 34 5 51 52 53 54 55 56 15 25 35 6 61 1 2 3 T C C C C C C e e e T C C C C C C e e e T C C C C C C e e e T C C C C C C e e e T C C C C C C e e e T C D D D 1 2 3 4 5 62 63 64 65 66 16 26 36 6 11 12 13 14 15 16 11 12 13 1 21 22 23 24 25 26 21 22 23 2 31 32 33 34 35 36 31 32 33 3 S S S S S C C C C C e e e S e e e e e e E e e e e e e E e e e e e e E ( 2.5 )
13
多數壓電材料晶體具有對稱性關係,壓電材料常數也具有對稱性。 本研究數值分析所使用的壓電陶瓷材料為 鋯鈦酸鉛( Lead zirconate titanate)系列的 PZT-4,屬於六方(hexdgonal crystal)晶系,若其極化方
向平行於 z (x3)軸,壓電陶瓷材料的彈性剛度矩陣可簡化為 11 12 13 12 11 13 13 13 33 44 44 66 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 E C C C C C C C C C C C C c ( 2.6 ) 其中,C66 G12。 壓電常數矩陣為 15 15 31 31 33 0 0 0 0 0 0 0 0 0 0 0 0 0 e e e e e e ( 2.7 ) 固定應變之介電常數矩陣為 11 11 33 0 0 0 0 0 0 S S S S ε ( 2.8 ) 將上述各式代入本構方程式,則
14 3 2 1 6 5 4 3 2 1 33 33 31 31 11 15 11 15 66 15 44 15 44 33 33 32 31 31 23 22 21 31 13 12 11 3 2 1 6 5 4 3 2 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 E E E S S S S S S e e e e e C e C e C e C C C e C C C e C C C D D D T T T T T T S S S ( 2.9 ) 2.1.4 壓電結構的運動方程式 超音波馬達定子結構包含壓電陶瓷與金屬彈性體,將之以有限元素 法離散成有限數目的元素。若暫時不考慮定子與轉子間的接觸正向力與 切線力作用,根據漢彌頓原理(Hamilton’s principle),若在一個週期的首 尾,位移與電位的一次變分為零,則系統總勢能的一次變分為零。將各 節點位移及電位組成一個待定的向量,可獲得整個系統的運動方程式, 表示如下: 0 0 0 0 0 uu u u Κ Κ M U U Κ Κ Φ Φ ( 2.10 ) 其中,Φ為電位,U為節點位移,M為超音波馬達定子的總質量矩陣(mass matrix),kuu為超音波馬達定子與機械位移有關的剛度矩陣,k 為與電 位移有關的剛度矩陣,ku為跟機械位移與電位移有關的剛度矩陣,系統 的質量矩陣M、剛度矩陣kuu、k (kTu)均為對稱的實數矩陣。若 考慮超音波馬達定子受到阻尼及外負載作用下,可將(2.10)式改寫成 0 0 0 0 0 0 uu u u Κ Κ M U C U U F Κ Κ Φ Q Φ Φ ( 2.11 )
15 其中,阻尼矩陣以比例阻尼(proportional damping)表示為C =M + K uu, F為超音波馬達定子與轉子間的接觸正向力與切線力,Q為作用於壓電材 料表面的電荷量。
2.2 模態分析
假設馬達定子系統無阻尼,也無外力作用下,若節點的位移及電位 都具有時諧因子 i t e,令UU0ei t、U 2U0ei t、Φ Φ 0ei t ,其中U0 及Φ0分別為節點機械位移及電位移的振幅。代入(2.10)式,獲得一組 齊性方程式(homogeneous equation), * 2 0 0 0 0 uu u u Κ Κ M U Κ Κ Φ ( 2.12 ) 模態分析為特徵值問題,非零解(non-trivial solution)成立的充分條件為 2 0 det 0 0 0 uu u u Κ Κ M Κ Κ ( 2.13 ) (2.13)式為特徵方程式,特徵值即為自然頻率(natural frequency)。2.3 暫態分析
本研究採用 ANSYS 套裝軟體計算結構的動態響應,模擬超音波馬達 定子接觸點的運動軌跡。ANSYS 套裝軟體的暫態動力學分析中,採用顯 示法(explicit method)與隱式法(implicit method)兩種直接積分法。顯 示法於空間域採用有限元素法,時間域則採用有限差分法處理各時間的 物理量,其時間增量必須足夠小,適合短時間的非線性碰撞力學與波傳 問題。隱式法則採用紐馬克疊代法(Newmark iteration)[29],以下介紹 其理論。16 步驟的解設為初始條件,代入下一步驟,逐次積分後,求得最後的暫態 響應。其疊代關係如以下二式: 1 [(1 ) 1] n n n n t u u u u (2.14) 2 1 1 1 [( ) ] 2 n n n t n n t u u u u u (2.15) 其中un代表在時間tn的節點位移向量,時間增量 t tn1tn, 與 是 Newmark 積分的參數,根據積分精度及穩定性予以設定。在本研究的分 析中,採用線性加速度法進行計算,設定 0.25, 0.5[30]。由(2.15) 式得 1 2 1 1 1 1 ( ) 1 2 n n n n n t t u u u u u (2.16) 考慮時間tn1的有限元素分析之運動方程式為 1 1 1 1 n n n Fn Mu Cu Ku (2.17) 將(2.16)式代入(2.14)式,再將結果與(2.16)式一起代入(2.17) 式,得 1 1 2 1 1 1 1 2 1 1 2 n n n n n n n n t t t t F M u u u u K K C u u u K (2.18) 其中, 12 t t K K M C 。應用(2.18)式,可根據時間點tn的結 果 求 取 un1 的 位 移 解 。 Newmark 時 間 積 分 法 屬 於 無 條 件 穩 定
17 (unconditionally stable))可取較大的時間增量 t 。但 t 必須足夠小, 才能收斂至更精確的結果。
2.4 超音波馬達致動原理
本研究設計的兩種雙模態耦合超音波馬達,皆於三角形定子的三側 邊,各黏貼三片厚度方向極化的方形壓電陶瓷(PZT-4),如圖 2.3、圖 2.4 所示,三片方形壓電陶瓷分成 A、A 、B 組,A、A 組為極化方向相反的 左右兩片壓電片,B 組為中間下方之壓電片。以兩組頻率與振幅相等、 固定相位差的正弦波訊號驅動 A、 A 相與 B 相換能器,同時激發結構的 縱向模態與扭轉模態,使其耦合。定子三個接觸點的位移分量與特定模 態相關,雙模態耦合可以使設計之接觸點作橢圓形軌跡運動,作動方式 如圖 2.5、圖 2.6 所示。 以三角形定子上頂角的突起點作為參考點,如圖 2.3、圖 2.4 所示, 參考點位於 Y 軸通過中心線處,因 Y 方向位移變化相對較小,故參考點 的位移分別以ux與uz表示如下: 0 inputsin( ) x x u u V t (2.23) 0 inputsin( 0 ) z z u u V t (2.24) 其中u0 x、u0 z為耦合模態在 X、Z 方向的振動位移, Vinput為驅動的交流電 壓,為定子的驅動頻率,為驅動電壓的相位差,0為不同參考點的相 位差。當在相同的驅動頻率與振幅下,若u0x u0z,則參考點的運動軌跡 如圖 2.7 所示,相位差 0 為 0 度、45 度及 90 度的參考點運動軌跡分別 為斜線、斜橢圓及正圓。18
第三章 數值模擬分析與結果
在設計新的機械組件時,數值分析為探討組件動態行為的重要步驟, 因此本研究在設計超音波馬達時也需先進行數值模擬分析以探討超音波 馬達的動態行為是否符合期待。在進行數值模擬分析時以有限元素法為 分析工具,透過結構模態分析(modal analysis)、時諧分析(harmonicanalysis)、暫態分析(transient analysis)了解本研究所設計的馬達。本章
分別對定子結構一與定子結構二進行四步驟探討。首先探討馬達定子尺 寸對特定模態共振頻率的影響,藉由調整定子特定幾何參數,達成模態 耦合與隔離目標;接著針對時諧分析與暫態分析中所使用到的定子材料 阻尼進行分析,選擇最適當的阻尼比計算出材料阻尼;第三步驟利用時 諧分析所得的模態共振頻率評估結構模態分析之雙模態耦合效果,並比 較不同運動方向位移之能量大小、相位;最後進行暫態分析,觀察馬達 定子接觸點的運動軌跡,探討運動軌跡是否符合理論結果。
3.1 三維有限元素之網格與元素型態
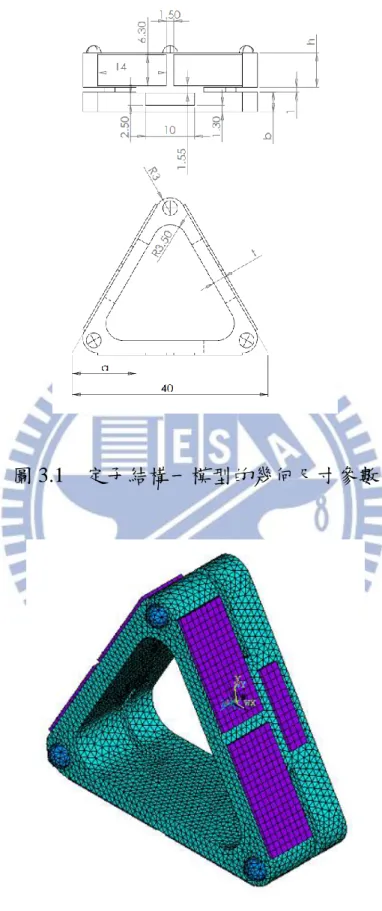
本研究以 ANSYS 有限元素分析軟體進行結構動態分析,分析程序主 要 分 成 三 部 份 : 前 處 理 ( pre-processor )、 求 解 ( solver )、 後 處 理 (post-processor)。於前處理步驟先建立馬達定子模型,選定適合的元素 型態並設定符合真實情況的材料係數﹐在將結構網格化以進行有限元素 法計算,最後設定結構的邊界條件。 定子結構一與定子結構二材料皆選用鋁合金 T-6061(材料參數列於 表 2),三角形定子的三側邊各黏貼三片厚度方向極化的方形壓電陶瓷, 上方為極化方向相反的兩壓電片,下方壓電片的極化方向與上方左側壓 電片同向。數值分析時所用的壓電材料參數列於表 3。壓電材料使用 8 節19 點之三維耦合元素(3-D coupled-field solid)SOLID5,每個節點具有 x、 y、z 三個方向的位移自由度及一個電位自由度。鋁合金的元素型態採用 SOLID45 元素,此元素同為 8 節點之三維元素,每個節點僅有 x、y、z 三個方向的位移自由度。 3.1.1 馬達定子結構一 定子結構一的幾何尺寸如圖 3.1,設計時以三角形定子的厚度 t、水 平孔縫長度 a、水平孔縫與定子下緣距離 b、水平孔縫與定子上緣距離 h 為變動參數,三角形定子的內導角 RI、外導角 RO、水平孔縫高度 RH 為 固定參數且與蔡慶芳[14]的結構三參數相同, 定子結構一之上方兩壓電片長 14(mm)、寬 6.3(mm)、厚度 0.5(mm), 下方單一壓電片長 10(mm)、寬 2.5(mm)、厚度 0.5(mm)。 定子結構一的元素數目共 47,805 個,如圖 3.2 所示。在邊界條件設 定上將定子底端之所有節點的位移自由度設定為零,壓電陶瓷電極部份, 元素上的節點電位差設定為零。 3.1.2 馬達定子結構二 定子結構二的幾何尺寸如圖 3.3,設計時以三角形定子的厚度 t、水 平孔縫長度 a、水平孔縫與定子下緣距離 b、水平孔縫與定子上緣距離 h、 外導角 RO、為變動參數,三角形定子的內導角 RI、水平孔縫高度 RH 為 固定參數。 定子結構二之上方兩壓電片長 12.5(mm)、寬 4.5(mm)、厚度 0.5 (mm),下方單一壓電片長 12.4(mm)、寬 3(mm)、厚度 0.7(mm)。 定子結構二的元素數目共 95,115 個,如圖 3.4 所示。在邊界條件設 定上將定子圓盤基座鎖孔上下面積之所有節點的位移自由度設定為零,
20 壓電陶瓷表面電極之節點電位差設定為零。
3.2 模態分析
3.2.1 共振模態辨別 區別三角形定子結構之共振模態是在設計馬達之前一項重要的工作, 三 角 形 超 音 波 馬 達 依 共 振 模 態 對 稱 變 形 情 形 主 要 可 分 為 縱 向 模 態 ( longitudinal mode )、 扭 轉 模 態 ( torsional mode ) 及 側 向 彎 曲 模 態(transverse bending mode)。為使定子接觸點與轉子做水平與垂直之相對
移動以形成橢圓形軌跡,選用縱向模態與扭轉模態為雙模態耦合之目標 模態,非對稱變形的振形暫以「其它模態」(other mode)著稱。縱向模 態主要以定子軸向長度的變化情形為判斷依據,扭轉模態則以周向旋轉 的變化情形為判斷依據。表 4 所列為未切水平孔縫時前 20 個模態變化情 形,觀察可知縱向模態為第 10 個模態,共振頻率為 74.218(kHz),扭轉 模態為 4 個模態,共振頻率 39.57(kHz),兩者頻率差距 34.648(kHz), 為達成模態耦合目的,勢必將縱向模態的共振頻率調降並與扭轉模態的 共振頻率接近至相差 50Hz 以內,在致動時才能同時激發兩組共振模態。 3.2.2 模態隔離與模態耦合 雙模態耦合是以特定的共振頻率同時激發出馬達結構雙模態振動, 驅動馬達轉子轉動。模態隔離則是為了避免激振出雙耦合模態鄰近的共 振模態,影響定子的振形與接觸點的振幅,造成馬達性能與控制性降低。 故探討完幾何尺寸對於特定模態的影響,並依據此設計準則,找出馬達 定子得最佳化參數,定子結構一與定子結構二的接觸點皆設置於三角形 定子的三頂點上緣。
21 3.2.2.1 定子結構一幾何尺寸對於特定模態共振頻率的影響與選定之參數 定子結構一邊長設為 40(mm),先探討定子上緣距離 h 對於共振模 態頻率的影響。圖 3.5 顯示,隨著 h 值增大,縱向模態的共振頻率增加, 扭轉模態的共振頻率降低,其他模態的共振頻率亦下降,縮短與縱向模 態共振頻率的差距,在 h=6(mm)與 h=7(mm)之間,縱向模態的共振 頻率與扭轉模態的共振頻率有一交點。 圖 3.6 所示為調整水平孔縫與定子下緣距離 b 的共振頻率變化,距離 b 由 2 (mm)增加至 4(mm),縱向模態與扭轉模態之共振頻率均下降, 分別下降 2.676(kHz)與 2.59(kHz),其他模態的共振頻率下降幅度較 縱向模小,下降約 2.155(kHz)。 接著調整三角型厚度 t,由 2(mm)上升至 3(mm)時,其結果如 圖 3.7 所示,縱向模態與扭轉模態之共振頻率約在 t= 2.5(mm)處有一 交點,且一直到 3(mm)時兩模態之共振頻率仍保持差距在 1.697(kHz) 內。其他模態的共振頻率上升幅度則遠大於縱向模態與扭轉模態,此現 象有助於共振頻率隔離之效果。 最後調整水平孔縫長度 a,數值模擬結果如圖 3.8 所示,隨著長度 由 11(mm)增加至 15(mm),扭轉模態與縱向模態之共振頻率間距減 小,約在 a=12(mm)與 a=13(mm)之間有一交點,一直到 a=15(mm) 時,兩模態之共振頻率仍保持差距在 0.718(kHz)內,有良好的模態耦 合。其他模態之共振頻率則上升,增加與縱向模態及扭轉模態之共振頻 率間的距離,更有利於模態隔離。 定子結構一如圖 3.9 所示,最後所選用之尺寸為長度 H=12(mm)、 管壁厚度 t=2.5(mm)、壁內導角 RI=3.5(mm)、外導角 RO=3(mm)、 橫向孔縫長度 a=13.1(mm)、橫向孔縫寬度 HC=1(mm)、水平孔縫與定 子上緣距離 h=7(mm)、水平孔縫與定子下緣距離 b=4(mm),兩組模態
22 疊加的耦合模態圖如圖 3.10 所示。 3.2.2.2 定子結構二幾何尺寸對於特定模態共振頻率的影響與選定之參數 定子結構二邊長設為 40(mm),先探討三角型厚度 t 的影響,圖 3.11 所示為隨厚度由 1.7(mm)增至 2.5(mm)的結果。縱向模態之共振頻 率與其他模態之共振頻率約在 t= 2(mm)處有一交點,隨著厚度的增加, 其他模態的共振頻率上升幅度大於扭轉模態。同時,縱向模態的共振頻 率逐漸接近扭轉模態的共振頻率,惟兩者的最小差距仍有 6.542(kHz) 左右。此趨勢雖有助於共振頻率耦合之效果,但是定子厚度過厚會降低 定子接觸點變形量,影響馬達效能,故不宜將厚度調整於過厚。 圖 3.12 所示為水平孔縫與定子上緣距離 h 對於不同模態共振頻率的 影響,隨著 h 值增加,縱向模態的共振頻率增加,扭轉模態的共振頻率 則降低,其他模態的共振頻率亦下降,但下降幅度較扭轉模態的共振頻 率小。 由調整水平孔縫與定子下緣距離 b 之頻率變化結果如圖 3.13 所示, 距離由 2(mm)增加至 4(mm),縱向模態與扭轉模態之共振頻率均緩 慢下降,分別下降 1.258(kHz)與 1.669(kHz)。隨著 b 值的增加,其他 模態的共振頻率下降幅度較扭轉模態快,下降約 1.76(kHz)。 接著調整外導角 RO 值,對於共振頻率值的影響如圖 3.14 所示,縱 向模態、扭轉模態與其他模態之共振頻率皆隨著 RO 值的增加而緩慢增 加,其他模態與扭轉模態之共振頻率差值亦隨著 RO 值的增加而緩慢拉 大,對於模態隔離的實現幫助不大。 圖 3.15 顯示調整水平孔縫長度 a 影響共振頻率的數值結果,長度 a 由 11(mm)增加時,其他模態與縱向模態之共振頻率差距減小,約在 a=12(mm)與 a=12.5(mm)之間有一交點,隨著長度增至 13.5(mm)
23 時兩模態之共振頻率差距拉至 6.355(kHz)內,有良好的模態隔離。隨 著水平孔縫長度 a 增加,縱向模態及扭轉模態之共振頻率逐漸逼近,且 相交於 13.5(mm)與 14(mm)之間。 定子結構二如圖 3.16 所示,最後所選用之尺寸為長度 H=10.8(mm)、 管壁厚度 t=2.5(mm)、壁內導角 RI=3.5(mm)、外導角 RO=3.5(mm)、 橫向孔縫長度 a=13.78(mm)、橫向孔縫寬度 HC=3(mm)、水平孔縫與 定子上緣距離 h=5.8(mm)、水平孔縫與定子下緣距離 b=2(mm),兩組 模態疊加的耦合模態圖如圖 3.17 所示。 3.2.3 共振模態收斂性 定子結構一與定子結構二的各模態自然頻率收斂性分析如圖 3.18、 圖 3.19 所示,元素數目由 0 至 60 萬,各組模態的自然頻率穩定收斂於定 值。本研究的馬達定子結構一採用 47,805 個元素,定子結構二採用 95,115 個元素,都落在穩定收斂區。
3.3 三角形定子材料阻尼設定
材料阻尼的設定為模擬重要參數之一,結構的材料阻尼假設為比例 阻尼(Proportional damping),阻尼矩陣C
M
K 。根據公式[29], 阻尼比 是振動頻率i的反比函數及線性函數的和, 2 2 i i i (3.1) 選用適當的結構材料阻尼比 與振動頻率i,以耦合模態與其鄰近較高模態之共振頻率,決定(alpha damp)與 (beta damp)。
本研究從不同結構阻尼比 與兩振動頻率間距大小不同所得數據,選
24 0.4%
為阻尼比,比較兩頻率間距影響的各頻率阻尼比。 3.3.1 定子結構一阻尼比分析 圖 3.20 為定子結構一的第一扭轉模態與側向彎曲模態的頻率所得出 之阻尼比曲線,兩模態的頻率差為 5.783kHz,曲線最低點的阻尼比 約 為 0.398%;圖 3.21 為定子結構一根據第一及第二扭轉模態的頻率所得出 之阻尼比曲線,兩模態的頻率差為 13.452kHz,曲線最低點的阻尼比 約 為 0.391%。 圖 3.22~圖 3.31 為定子結構一阻尼比 為 0.4%~0.8%的時諧分析 X 方 向最大位移響應圖與暫態分析達穩定 X 方向位移響應圖。 3.3.2 定子結構二阻尼比分析 圖 3.32 為定子結構二的第一扭轉模態與側向彎曲模態的頻率所得出 之阻尼比曲線,兩模態的頻率差為 6.044kHz,曲線最低點的阻尼比 約 為 0.397%;圖 3.33 為定子結構二第一及第二扭轉模態的頻率所得出之阻 尼比曲線,兩模態的頻率差為 12.39kHz,曲線最低點的阻尼比 約為 0.391%。 圖 3.34~圖 3.43 為定子結構二阻尼比 為 0.4%~0.8%的時諧分析 X 方 向最大位移響應圖與暫態分析達穩定 X 方向位移響應圖。 3.3.3 阻尼比選定 結果顯示倘若選定的模態之自然頻率間隔較小,在該頻率範圍內所 得之阻尼比差值較小,在頻率範圍外的差異反而加大,故本研究選擇頻 率間隔較小的兩模態之共振頻率為計算的組合。 由時諧分析與暫態分析的比較可知,阻尼比 對於時諧分析的振幅值25 影響較大,且兩種結構之暫態位移響應皆無拍的情況(beat phenomena) 產生,較大的阻尼比 會使時諧分析的振幅值與暫態分析達穩態時的振幅 值差距減小。 表 5 所列,為定子結構一的時諧分析 X 方向最大值與暫態分析達穩 定 X 方向位移植,當
0.6%時,定子結構一時諧分析的 X 方向位移與 暫態分析到達穩態時的 X 方向位移值差為 0.5711(m),為可容許誤差 範圍內,因此選用此阻尼比為計算材料 與 阻尼值的依據。以
0.6% 為例、1 2 23926(rad/sec)、 2 2 29709(rad/sec),可求得 991.302 (rad/ sec)
, -8 3.586 10 (sec/rad) 。 表 6 所列為定子結構二的時諧分析 X 方向最大值與暫態分析達穩定 X 方向位移植,當
0.6%時,定子結構二時諧分析的 X 方向位移與暫 態分析到達穩態時的 X 方向位移值差為 0.46575(m),為可容許誤差範 圍內,因此選用此阻尼比為計算材料阻尼與的依據。以
0.6%為例、 1 2 22181 ( rad/sec )、 2 2 28225 ( rad/sec ), 可 求 得 9 3 6 . 8 7 2 ( r a d / s e c )
, -8 3.788 10 (sec/rad) 。3.4 三角形定子接觸點的振動位移
時諧分析用於計算馬達定子接觸點受到壓電陶瓷激振的位移響應。馬 達定子上的兩組壓電換能器以兩組頻率相等與振幅 300Vp-p的弦波訊號激 振,兩組訊號相位差為 90 度,由時諧分析結果獲得馬達定子的位移響應。 定子結構一與定子結構二的 A(A )、B 相致動器表面電極施予交流 電壓,參考圖 2.3、圖 2.4 所示,以馬達定子接觸點作為參考點計算其位 移響應。若要使馬達轉子轉動需由馬達定子接觸點作橢圓形軌跡運動, Ueha et al [6]曾提出,軌跡中的周向位移愈大,則馬達的性能愈好,此論 點將作為本文設定座標的依據。橢圓形軌跡由接觸參考點的周向方向 X
26
與軸向方向 Z 位移疊加而成,Y 則為三角形定子的徑向方向。
3.4.1 定子結構一之時諧分析結果
定子結構一接觸點的 X、Y、Z 方向位移分量之頻率響應函數圖
如圖 3.44 所示,Ux最大、Uz次之、Uy最小。接觸點的 Ux、Uz之共振頻
率大約為 23.928 (kHz)與 23.901 (kHz)。雙模態耦合情況佳,且與前
後共振頻率有模態隔離的效果,以此結果繼續進行暫態響應分析,取得 馬達定子接觸點的位移軌跡圖。
3.4.2 定子結構二之時諧分析結果
定子結構二接觸點的 X、Y、Z 方向位移分量之頻率響應函數圖如圖
3.45 所示,Uz最大、Ux次之、Uy最小。接觸點的 Ux、Uz之共振頻率大
約為 22.176 (kHz)與 22.213 (kHz)。雙模態耦合情況亦佳,且與前後 共振頻率有模態隔離的效果,以此結果繼續進行暫態響應分析,取得馬 達定子接觸點的位移軌跡圖。
3.5 暫態響應分析
結構暫態分析模組用於模擬超音波馬達定子接觸點的運動軌跡。考 慮施加電壓為時間函數,輸入相位差 90 度的兩弦波訊號至 A( A )、B 相 壓電換能器,驅動整體結構振動,將超音波馬達定子接觸點視為參考點, 擷取其節點於啟動瞬間與穩態的位移變化量,並將 X、Z 方向位移合成橢 圓形軌跡。 所使用的有限元素套裝軟體 ANSYS 的暫態動力學求解是採用直接 積分的隱式 Newmark 方法進行數值分析,本研究將時間增量設為周期的 三十二分之一,並將驅動週期分成三十二等份的負荷增量,確保良好的27 計算精度。 3.5.1 定子結構一之暫態分析結果 定子結構一於時諧分析所得之雙模態共振頻率分別為 23.901(kHz) 與 23.928(kHz),以扭轉模態之共振頻率(23.928(kHz))為驅動頻率, 驅動電壓為 300Vp-p交流電壓,施加於 A( A )、B 相致動器的表面電極, 共驅動 150 個週期。圖 3.46(a)~圖 3.46(c)所示分別為定子結構一接 觸點在驅動後之 X、Y、Z 方向的位移響應,位移暫態響應的振幅逐漸遞 增,直到 2.4 (msec),也就是約 50 週期以後出現最大值並達穩定狀態。 定子結構一之 Y 方向位移響應的振幅波動情形與 X、Z 方向相近, 但位移振幅相較於 X 與 Z 方向之位移甚小。同一時間下,X 與 Y 方向位 移可繪製成如圖 3.47(a)所示,啟動時質點由中心處隨時間增加,向外 作橫橢圓軌跡運動。將 X 與 Z 方向位移繪製成如圖 3.47(b)所示的軌跡, 啟動時的質點隨時間增加,由中心處向外作與 X-Y 反方向之橫橢圓軌跡 運動。Y 與 Z 方向位移軌跡如圖 3.47(c)、所示,質點由中心處向外作 斜直線運動。 3.5.2 定子結構二之暫態分析結果 定子結構二於時諧分析所得之雙模態共振頻率分別為 22.176(kHz) 與 22.213(kHz),以扭轉模態之共振頻率(22.176(kHz))為驅動頻率, 模擬超音波馬達定子接觸點的暫態響應,驅動電壓為 300Vp-p交流電壓, 施加於 A( A )、B 相致動器的表面電極,共驅動 150 個週期。圖 3.48(a) ~圖 3.48(c)所示分別為定子結構二接觸點之 X、Y、Z 方向的位移響應, 位移暫態響應的振幅逐漸遞增,一直到 2.3 (msec)(約 50 週期)以後,
28 出現最大值並達穩定狀態。 定子結構二之 Y 方向位移響應的振幅波動情形與 X、Z 方向相近, 但位移振幅相較於 X 與 Z 方向之位移甚小。同一時間下,X 與 Y 方向位 移可繪製成如圖 3.49(a)所示,啟動時質點由中心處隨時間增加,向外 作立橢圓軌跡運動。將 X 與 Z 方向位移繪製成如圖 3.49(b)所示的軌跡, 啟動時的質點隨時間增加,由中心處向外作與 X-Y 反方向之立橢圓軌跡 運動。Y 與 Z 方向位移軌跡如圖 3.49(c)所示,質點由中心處向外作斜 直線運動。 3.5.3 暫態分析與時諧分析振幅誤差來源 暫態分析的計算結果顯示,位移響應趨勢與 3.4 節時諧分析計算的振 幅響應趨勢有些許差距,乃由於 ANSYS 套裝軟體的時諧分析與暫態分析 所使用的演算法不同所致。
29
第四章 實驗量測與結果討論
進行數值分析後,確認所設計之定子結構接觸點之運動軌跡與振幅 大小符合預期後,本章以數值分析所得之結構幾何尺寸,加工製造馬達 原型機,進行實驗量測。實驗量測先以督卜勒干涉儀量測馬達原型機的 共振頻率,接著量測馬達原型機的轉速與扭矩性能曲線。4.1 馬達原型機製作
三角形超音波馬達分成定子與轉子兩部分,定子由三角形鋁合金管 狀體、方形壓電片與底座組成。定子與底座以銑床加工,並於三角形各 角頂點上緣處埋入鋼珠作為突起接觸點,水平孔縫開槽於三個頂角的下 方。方形壓電片訂製寰辰科技公司的壓電陶瓷 PZT-4,如圖 4.1(a)所示, 極化方向為厚度方向,並藉由如圖 4.1(b)所示之 AB 導電銀膠 CW2400 搭配如圖 4.2 所示之壓克力夾具輔具黏貼於三角形定子各邊的外側。壓克 力夾具輔具乃為確保方形壓電片黏貼在正確的位置上並提升黏著強度。 圖 4.3(a)、圖 4.3(b)分別為完成加工製作的定子結構一與定子結構二。4.2 馬達定子共振頻率量測
4.2.1 量測架構與量測參考點量測馬達定子共振頻率使用雷射測振儀(laser Doppler vibrometer, LDV) LV-1720A (Ono Sokki Corporation, Tokyo, Japan)配合頻譜分析 儀 NF-FRA5087 (NF Corporation, Yokohama, Japan)量測機械振動的面
外位移之頻率響應。由頻譜分析儀輸出弦波訊號(定子結構一 2Vp-p、定

![圖 1.1 Barth [1]的超音波馬達](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/66.892.192.714.98.1022/圖11Barth1的超音波馬達.webp)
![圖 1.9 Vyshnevskyy 與 Kovalev [11]的超音波馬達](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/70.892.166.775.141.962/圖19Vyshnevskyy與Kovalev11的超音波馬達.webp)
![圖 1.11 Shi 與 Zhao [13]的線性馬達驅動示意圖](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/71.892.165.739.112.1020/圖111Shi與Zhao13的線性馬達驅動示意圖.webp)
![圖 1.13 Lu et al [15]的超音波馬達](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/72.892.116.757.104.1079/圖113Luetal15的超音波馬達.webp)
![圖 1.15 Iula et al [17]的超音波馬達](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/73.892.120.766.128.1043/圖115Iulaetal17的超音波馬達.webp)
![圖 1.17 Liu et al [19]的超音波馬達](https://thumb-ap.123doks.com/thumbv2/9libinfo/8645735.193555/74.892.126.757.144.1039/圖117Liuetal19的超音波馬達.webp)