國 立 交 通 大 學
土 木 工 程 學 系
碩 士 論 文
SRTM/TopSAR 高程數據比對與多尺度分析
研 究 生:賴子銘
指導教授:史天元
中華民國九十三年六月
SRTM/TopSAR 高程數據比對與多尺度分析
The Multiscale Analysis and the Comparision of DEM Acquired
from SRTM and TopSAR systems
研 究 生:賴子銘 Student: Ts-Ming Lai
指導教授:史天元 Advisor: Dr. Tian-Yuan Shih
國 立 交 通 大 學
土 木 工 程 學 系
碩士論文
A Thesis
Submitted to Department of Civil Engineering
College of Engineering
National Chiao Tung University
in Partial Fulfillment to the Requirements
for the Degree of Master
in
Civil Engineering
June 2004
Hsinchu, Taiwan, Republic of China
SRTM/TopSAR 高程數據比對與多尺度分析
學生:賴子銘 指導老師:史天元
國立交通大學土木工程學系
中文摘要
干涉合成孔徑雷達(InSAR)可進行地表三維地形之測繪,InSAR 具有作業受 限小、製圖速度快、作業單價低之優點。然而 InSAR 測量受地物性質、地形效 應與植披影響很大。本文針對兩組InSAR DEM 進行高程比對與多尺度分析,分 別為太空梭雷達製圖任務(SRTM)與空載地形合成孔徑雷達(TopSAR)高程數據, 以航空攝影測量所得DEM 為參考數據進行比對,對 InSAR 數據的差值平均、精 度與粗差進行分析。比對區域面積達2497 平方公里,比對點數共 3,017,889 點。 比對結果顯示在多山地區SRTM 之精度為 9.451 公尺,在平坦地區精度可達 7.579 公尺,均優於 NASA 公佈的精度規範。而空載 TopSAR 資料則包含大量粗 差,在山區測量的品質不理想。若不經過粗差偵測和編修,無法達到 NASA 公 佈的1~5 公尺精度,在粗差移除後平坦地區的精度為 5.603 公尺,山區則為 12.383 公尺。 多尺度分析則使用以小波轉換與傅立葉轉換分析三組資料的尺度性質,探 討不同尺度下三組資料的關連與差異,並分析不同尺度對於精度的影響,最後則 將小波分析於粗差偵測與等高線縮編的應用上,顯示小波理論在高程資料縮編與 不同尺度DEM 分析的應用潛力。The Multiscale Analysis and Comparision of DEM Aquired
from SRTM and TopSAR systems
Student : Ts-Ming Lai Advisor : Tian-Yuan Shih
Department of Civil Engineering
National Chiao Tung University
Abstract
InSAR technology takes advantages of cloud penetrating capability of microwaves, being claimed as a system for all weather and day and night. However, the accuracy of InSAR data was affected by terrain slope, canopy and land cover. The quality of InSAR DEM needs to be further inspected.
This thesis focused on the DEM comparison and multiscale analysis for two InSAR DEM datasets. One is the 3 arc data from Shuttle Radar Topographic Mission (SRTM), and the other is from Topographic Synthetic Aperture Radar (TopSAR) mission. A DEM dataset obtained by aerial photogrammetry is used to validate the system bias, random error and blunders of the two InSAR DEMs. The aera size of the study aera is 2,497 km2 with a total of 3,017,889 pixels.
Comparing with the photogramtric DEM, the RMSE of SRTM data is 9.451m in the mountainous area and 7.579m in the flat area. It is equal or better than the offical specification. But the TopSAR data that contained massive blunders was not as good as claimed in the specification of an accuracy 1~5m, especially in the mountainous aera. After removing the blunders, the RMSE of DEM difference is 5.603m in the flat area and 12.383m in the mountainous area.
analysis with wavelets and Fourier transform, such as the relation and difference between three dataset in different scale, and the impact in accuracy in different scales. The application in contour genlization and blunder detection was also proved to be useful by applying wavelet and multiscale analysis to th DEMs.
誌謝
隨著論文的修改逐漸接近尾聲,飄蕩在四周的空氣也漸漸轉變成不一樣的 味道,就好像傘兵菜鳥剛從飛機上被推下去,第一次用全身開始去感受風的力 量,消失的重力,迎面而來的是全面遼闊的大地,是一種既是茫然,無助,又是 興奮的味道。 在機艙上的此刻我最要感謝的是指導教授史天元教授,謝謝老師兩年來給 我的照顧、支持、鼓勵與教誨,使我這兩年來的收穫與感激,一紙難盡。也要感 謝組上陳春盛教授、黃金維教授與李振燾教授的教導,更要感謝口試委員成功大 學曾義星教授,台灣大學賴進貴教授與中興大學蔡榮得教授對於本論文的指導與 肯定。 這邊也要感謝博士班劉進金學長幫忙修改英文摘要並提供許多的寶貴建 議,當然也還要感謝博士班學長榮寬和已畢業的學長偉嘉、國鑫在學業與生活上 的幫忙。當然,一同作戰的介嵐哥、BOSS、棒呆的郭朗哲、阿福、福利、小支、 大雄、宣昶、米粉跟宜珊,和學弟妹佩珊、世青、印淞、佑廷、惎非、展鵬、阿 達、兼室友的貓哥,除了幫忙之外,大家的笑聲讓枯燥的研究生活變的那麼有趣 而且令人想念。 還有死黨灰鷹、亞宏跟妹,過去在成大奇幻社的好友skd、熊、dor、newman、 Guyver、吟游詩人亞德西、大魔王、海賊克拉克、foreman…直到這個列表無法 寫完。還有常鼓勵我的小慈,有太多太多的人需要去感謝了,謝謝大家。 最後,我想把一切喜悅和成就感都獻給我的家人:老爸、老媽、老姐與小 比,貝吉達與咪咪。你們總是會在全世界都結凍時,還能讓我保有最後一絲溫暖。 最後沉重的艙門被拉開,伴隨著呼哮的風聲,縥藍的海與翠綠大地展開於 眼前。目錄
中文摘要... I Abstract... II 誌謝...IV 目錄...V 圖目錄...VIII 表目錄...XI 第一章 緒論...1 §1-1 研究動機與目的 ...1 §1-2 文獻回顧 ...2 §1-3 研究方法 ...4 §1-4 論文架構 ...5 第二章 InSAR 測量原理與實驗資料介紹 ...6 §2-1 雷達測量原理 ...6 §2-1-1 雷達影像特性...8 §2-1-2 干涉合成孔徑雷達...10 §2-2 SRTM...14 §2-2-1 SRTM 資料格式與特性 ...16 §2-2-2 臺灣地區 SRTM 資料組成 ...19 §2-3 TopSAR ...21 §2-3-1 TopSAR 資料格式 ...24 §2-3-2 臺灣地區 TopSAR 資料組成...26 §2-4 參考航空攝影測量數據 ...28 第三章 高程數據比對...30 §3-1 實驗數據描述 ...30§3-2 比對流程 ...32 §3-3 視覺比較 ...34 §3-4 精度分析 ...37 §3-4-1 TopSAR 各幅數據精度分析 ...45 §3-4-2 不同坡度精度分析...47 §3-5 粗差分析 ...49 §3-5-1 各幅 TopSAR 粗差分析...51 §3-5-2 不同坡向與粗差統計...52 §3-6 小結 ...54 第四章 多尺度分析原理...55 §4-1 尺度、頻率與解析度 ...55 §4-2 多尺度空間 ...56 §4-3 小波分析 ...58 §4-3-1 連續小波轉換...59 §4-3-2 快速小波轉換...60 §4-4 頻譜分析 ...62 第五章 多尺度分析與應用...64 §5-1 實驗區描述 ...64 §5-2 小波分析 ...66 §5-2-1 不同尺度小波係數分量分析...68 §5-2-2 不同尺度對精度之影響...71 §5-2-3 不同尺度相關性分析...73 §5-3 頻譜分析 ...75 §5-4 多尺度分析應用 ...79 §5-4-1 粗差偵測...79 §5-3-2 不同尺度等高線簡化比較...80
第六章 結論與建議...82 參考文獻...84 附錄A:SRTM 數據 HGT 轉 ASCII 流程 ...89 附錄B:高程比對誤差直方圖...95 附錄C:小波分析實驗數據...98 作者簡歷...104
圖目錄
圖1-3-1:研究流程……….4 圖2-1-1:雷達成像幾何[Bamler, 1999] ………….………..6 圖2-1-2:雷達影像幾何變形[Ouarzeddine, 2002]………9 圖2-1-3:一次通過干涉成像幾何[Abdelfattah et al, 2002] ……….12 圖2-1-4:重複通過干涉成像幾何[Abdelfattah et al, 2002] ……….13 圖2-2-1:SRTM 裝置圖[Rabus et al, 2003] ………..15 圖2-2-2:SRTM 掃瞄次帶寬組成示意圖[Rabus et al, 2003] ………..…16 圖2-2-3:SRTM 資料庫涵蓋圖 [NASA-JPL, 2003] ………17 圖2-2-4:歐亞資料庫涵蓋圖[NASA-JPL, 2003] ……….…17 圖2-2-5:資料獲取次數圖[NASA-JPL, 2003] ……….18 圖2-2-6:不同誤差來源影響量與尺度[Rabus et al, 2003] ………..18 圖2-2-7:臺灣 SRTM 資料黑白暈渲圖………20 圖2-2-8:臺灣 SRTM 資料彩色暈渲圖………20 圖2-3-1:DC8 飛機外觀[NASA-JPL, 2003] ……….21圖2-3-2:TopSAR 高程資料 BIL 格式轉 XYZ 示意圖………..25
圖2-3-3:PacRIM-II 涵蓋區域………...………..26 圖2-4-1:參考航空攝影測量數據涵蓋範圍……….28 圖2-4-2:參考航測資料於圖幅 9520 兩百公尺等高線圖……..………..29 圖2-4-3:參考航測資料於圖幅 9521 一百公尺等高線圖……..………..29 圖3-1-1:9520 實驗區範圍(底圖取自 Papago 電子地圖) ………30 圖3-1-2:9521 實驗區範圍(底圖取自 Papago 電子地圖) ……….31 圖3-2-2:高程比對流程………..33 圖3-2-3:搜索方式………..34 圖3-3-1:9520 實驗區黑白暈渲圖部分…..………34
圖3-3-2:9521 實驗區黑白暈渲圖部分…..………35 圖3-3-3:9520 實驗區剖面線位置圖(底圖為 PapaGo 電子地圖) ………35 圖3-3-4:9520 實驗區剖面線圖………..…………36 圖3-4-1:9520 實驗區 TopSAR 差值分佈圖…………...………39 圖3-4-2:9521 實驗區 TopSAR 差值分佈圖…………..……….40 圖3-4-3:9520 實驗區 SRTM 差值分佈圖………..………41 圖3-4-4:9521 實驗區 SRTM 差值分佈圖………..………42 圖3-4-5:9520 實驗區 TS-SRTM 差值分佈圖……….43 圖3-4-6:9521 實驗區 TS-SRTM 差值分佈圖………44 圖3-4-7:SRTM 誤差與坡度散佈圖.………...47 圖3-4-8:TopSAR 誤差與坡度散佈圖….………...48 圖3-5-1:9520 實驗區粗差分佈圖部分…...………….………..50 圖3-5-2:9521 實驗區粗差分佈圖部分……….………...…………..50 圖3-5-4:粗差發生所在坡向的統計直方圖………...………50 圖3-5-4:TopSAR 資料粗差發生與坡向關係………53 圖4-2-1:多尺度空間示意圖………..57 圖4-3-1:時頻域表示[Polikar, 2001],由 5hz, 10hz, 20hz, 30hz 組成………..58 圖4-3-2:墨西哥帽小波函數的擴張與平移[Zatelli, 2002] ………...59 圖4-3-3:一維子頻帶分解………..60 圖4-3-4 二維離散小波轉換分解濾波器………...62 圖4-3-5:離散小波分解架構………...60 圖4-4-1:原始影像 f(x,y)與其對應的傅立葉頻譜|F(u,v)| ………63 圖4-4-2:頻譜分析示意圖………...63 圖5-1-1:TopSAR 數據航線示意圖………64 圖5-1-2:多尺度實驗區黑白暈渲圖………...65 圖5-2-1:Db3 小波分解濾波器組………..66
圖5-2-2:Db3 小波尺度函數與小波函數………..66 圖5-2-3:ϕ( , )x y 係數平方和對數折線圖………..………69 圖5-2-4: H( , ) x y ψ 係數平方和對數折線圖……….69 圖5-2-5: V( , ) x y ψ 係數平方和對數折線圖…………..………70 圖5-2-6: D( , ) x y ψ 係數平方和對數折線圖………….………70 圖5-2-7:Ts9520 尺度 j 與尺度 j-3 差值三維分佈圖………..71 圖5-2-8:不同尺度下精度變化,單位公尺………72 圖5-3-9: ( , )ϕ x y 係數相關性折線圖………73 圖5-3-10: H( , ) x y ψ 係數相關性折線圖……….74 圖5-3-11: ( , )V x y ψ 係數相關性折線圖………..………74 圖5-3-12: D( , ) x y ψ 係數相關性折線圖……….………74 圖5-3-1:傅立葉頻譜圖………...…76 圖5-3-2:9520 實驗區角度頻譜分析………..77 圖5-3-3:9520 實驗區半徑頻譜分析………..77 圖5-3-4:9521 實驗區角度頻譜分析………..78 圖5-3-5:9521 實驗區半徑頻譜分析………..78 圖5-4-1:Ts9521 剖面線以 FWT 進行分解……….79 圖5-4-2:不同尺度數據產製等高線比較…...………81
表目錄
表2-2-1:臺灣地區 DEM 組成圖幅……….……….……….………..19 表2-3-1:TopSAR 系統參數……….. ……...……….……….………22 表2-3-2:AIRSAR 操作模式……….……….……….……….23 表2-3-3:TopSAR 資料格式……….………….……….……….………24 表2-3-4:臺灣地區 TopSAR 高程資料簡表……….………...…………26 表2-3-5:PacRIM-II 高程資料轉換成果檢核……….………...……….27 表3-1-1:實驗區範圍與參考 DEM 高程範圍(m) ……….……….30 表3-1-2:實驗區高程點數統計……….……….……….31 表3-1-3:坡度面積比率表……….……….……….31 表3-2-2:SRTM、TopSAR 與參考攝影測量數據簡表………..…32 表3-2-2:高程比對關係……….……….……….……….…………...34 表3-4-1:9520 實驗區高程比對差值統計……….……….……….……...37 表3-4-2:9521 實驗區高程比對差值統計……….……….……….……...38 表3-4-3:TopSAR 各數據與 RefDEM 分析統計表……….…..……….……45 表3-4-4:TopSAR 各數據與 SRTM 比對統計表……….………...……46 表3-4-5:SRTM 於不同坡度精度分析……….……….……….…………47 表3-4-6:TopSAR 數據於不同坡度精度分析……….……….………..48 表3-5-1:9520 實驗區移除粗差後差值統計表……….……….………49 表3-5-2:9521 實驗區移除粗差後差值統計表……….……….……49 表3-5-3:TopSAR 各幅數據粗差移除後差值統計表……….……..………….……51 表3-5-4:TopSAR 相對於 SRTM 比對粗差移除後差值統計表…..…….……….…51 表5-2-1:尺度、頻率與解析度關係……….……….……….………..67第一章 緒論
§1-1 研究動機與目的
近年來主動式遙測技術快速發展,尤其在產製大範圍高解析度數值高程模型 (Digital Elvation Model, DEM)領域,如干涉合成孔徑雷達(Interferometric Synthetic Aperture Radar, InSAR) 與光達(Light Range and Detection, LIDAR),以主動式感
測的特性逐漸受到重視。航空攝影測量至今仍是產製 DEM 最普遍並成熟的方 法,使用者可以依照需求由影像產生合用的高程資料。但航空攝影測量受限於天 候與日照,使得取得良好影像並不容易,傳統解析攝影測量產製DEM 較為昂貴 與費時,亦需仰賴大量的人工處理,數值攝影測量雖可以提高自動化程度,但自 動匹配過程仍不可避免的發生錯誤,人為的介入是必須的。而近年來雷達測量利 用微波的特性進行干涉處理獲取高程資訊,以大範圍作業、無視雲霧與輕濛、自 動化製圖與費用較低等優勢逐漸受到重視。 雷達測量利用微波的特性可以穿透雲霧,較少受到天候因素影響,尤其在位 處亞熱帶地區的臺灣在實施航空攝影測量過程中常因天候不佳、雲霧遮蔽或日照 不足需要重新進行航拍,在測量過程中多所不便,而雷達測量正可以克服這項缺 點而應用於多雲霧的熱帶地區製圖。但雷達測量受地物性質、地形遮蔽與植披影 響很大,測量成果需經進一步的驗證。 在使用這些不同資料的同時,也需注意到隨著測量方式的不同,所產製的高 程資料各自擁有不同的尺度性質。不同尺度的高程資料在進行地形分析有迥然不 同的結果(如徑流分析)。選擇適當尺度成為空間數據在應用與分析上的重要問 題。 空間資料的尺度與測量時的取樣頻率有關,亦即每一組高程資料皆有其尺度 性質,原始量測點數據多藉由內插方式內插成某個尺度的網格以方便使用。
InSAR 測量利用兩幅雷達影像進行干涉處理以生產 DEM,而解析攝影測量常以
來回剖面線或等高線取樣方式進行DEM 取樣。由於使用波段、成像幾何、取樣
分佈的不同,可以預期InSAR 與航空攝影測量數據的尺度性質將會有所不同。 本文搜集臺灣地區公開的InSAR資料,分別為涵蓋全球的太空梭雷達製圖任 務(Shuttle Radar Topographic Mission, SRTM)數據與空載地形合成孔徑雷達 (Topographic Synthetic Aperture Radar, TopSAR)數據,這兩組資料皆由NASA-JPL 公佈於網路上提供各界使用者自由使用,SRTM利用太空梭為載具進行雷達測 量,航高為223公里,目前公開全球三弧秒數據與美國本土一弧秒數據[JPL, 2003]。TopSAR則是以飛機為載具,航高8500公尺,產製的DEM解析力為5公尺。 本文希望藉由高程比對與多尺度分析的研究希望提供使用這些雷達數據的依據 與參考。
§1-2 文獻回顧
針對這些不同觀測方式產製 DEM 的性質,已經有許多學者進行研究,如Norheim[2002]在美國 Snoqualmie 河谷所做的實驗中,以 GPS 檢核點比對 InSAR 與LIDAR 資料,發現 InSAR DEM 之地形描述面普遍高於 LIDAR,而 InSAR 資 料差值平均為-0.81m,標準差為 3.29m,LIDAR 資料差值平均則為-0.27m,標準 差0.83m,顯示 LIDAR 資料在系統誤差與隨機誤差表現都比 InSAR 要好。交互 比對 InSAR 與 LIDAR 資料發現坡度越陡峭,則兩組資料差異越大,在凹面坡 InSAR 普遍高於 LIDAR,在凸面坡則相反,也就是說 InSAR 資料的處理過程有
將地貌平滑化的傾向。如填補凹面坡與切掉凸面坡,此亦說明了 InSAR 資料的
空間解析度較低。在森林與灌木叢地區這兩組資料有較大差異,在空曠地、開發 區、草地差異則較小,InSAR DEM 在高密集開發區有很明顯的向下的系統誤差 存在,可能為雷達波對建物與其他地物的反射性質不同造成。
Sun[2003]在 SRTM 資料與太空梭雷射測高(Shuttle Laser Altimeter, SLA)比對 研究中指出,兩組資料SRTM 高程普遍高於 SLA 資料,SRTM-SLA 差值的平均
值為9.80m,標準差為 8.57m,植披高度小於 10m 時兩者差值趨於隨機,而大於 10m 的地區則有一趨勢存在。在植披覆蓋的地區中,兩者差值平均值為 16.17m, 標準差為5.56m,在裸露地的平均值與標準差為 3.11m 與 5.45m,可以看出在裸 露地的數據離散情況較為接近,主要差異在差值平均的不同,而 SRTM 資料在 植披覆蓋區所記錄的高程並非地表高程,其差值平均可能由雪覆蓋厚度不同影 響。 林紀綱[2003]將臺灣地區 TopSAR 資料重新取樣後與台澎地區 40 公尺網格 數值地形資料比對分析結果發現,平地地區的隨機誤差RMS 約為 1~5 公尺,高 山地區的RMS 則為 10~15 公尺,但比對發現在山區之系統誤差平均最高可達 30 公尺,顯示PacRIM-2 資料測定臺灣山區 DEM 成果品質未盡理想。 在多尺度分析方面應用於地形資料的研究,國內研究者如石宏揚[2003]應用 小波理論對DEM 誤差進行偵測並修復,實驗結果顯示對於 DEM 中點狀誤差可 以有效偵測,條狀誤差則有明顯的抑制效果,但基準段落誤差則無法有效的去 除。而賴伯倫[1998]使用小波理論於 地形之多重解析度分析,並由分解後 DEM 的小波係數淬取地形特徵點組成TIN,並與 VIP 方法進行比較,並探討不同小波 基底對各種地形的適用性。黃國良[1999]則是利用不同尺度的小波來表達含有斷 線的城市表面剖面線,以小波尺度函數對於面或線的描述,並與傅立葉方法進行 比較。國外研究如 Fan[2001]以小波理論的等高線進行自動化縮編,以多尺度框 架為架構產生不同尺度的 DEM,並由這些不同尺度的 DEM 產生等高線作為自 動化縮編的方式。Zatelli[2002]在 GRASS 下開發以小波為基礎的多尺度分析模 組,並以移除 LIDAR 資料的懸高點,進行粗差濾除處理。Little[1994]應用小波 於海槽地形分析,以多尺度分析進行不同寬度的中洋脊、斷層等特徵線淬取。 Gallant [1997]則使用傅立葉轉換與小波轉換分析一維剖面線資料,探討尺度相關 性。
§1-3 研究方法
本研究研究流程如圖1-3-1 所示,分為高程比對與多尺度分析兩大部分。 高程比對針對兩組InSAR DEM 進行 DEM 比對,以航空攝影測量數據作為 參考數據進行平均誤差、隨機誤差、粗差進行精度分析,並探討在不同坡度與坡 向對精度的影響。 多尺度分析則使用以小波轉換與傅立葉轉換分析三組資料的尺度性質,探 討不同尺度下三組資料的關連與差異,並分析不同尺度對於精度的影響,最後則 討論小波分析於粗差偵測與等高線縮編的應用。 圖1-3-1:研究流程
§1-4 論文架構
本文共分為六章,各章節主題說明如下: 第一章 緒論:敍述研究動機與目的、相關文獻回顧、研究方法與論文架構。 第二章 InSAR 測量原理與實驗資料介紹:介紹 InSAR 測量的原理與方法, 並對兩組InSAR 實驗資料格式與數據組成進行描述。 第三章 高程資料比對:描述實驗區相關資訊,論述高程比對流程與分析姐 果,並對粗差與坡度坡向進行探討,最後對本章實驗結果做一整理。 第四章 多尺度分析原理:論述尺度、解析度與頻率的關係,簡介頻譜分析法、 小波分析和多尺度空間理論。 第五章 多尺度分析應用於高程資料比對:應用頻譜分析、離散小波轉換對不 同尺度的資料進行分析,並討論小波分析於等高線縮編之應用。 第六章 結論與建議:針對本論文所做實驗成果進行說明與討論第二章 InSAR 測量原理與實驗資料介紹
§2-1 雷達測量原理
成像雷達(Imaging Radar)是一種主動式遙測系統,此系統主動發射微波探測 地物並接收回訊。由於主動式性質不像光學式被動系統接收太陽光的反射,因此 可以在夜間作業。雷達系統使用微波波段,由於長波長特性可以穿透雲霧進行觀 測,擁有光學式系統無法取代的優點。相對於合成孔徑雷達(Synthetic Aperture Radar, SAR),一般雷達系統又稱為 真實孔徑雷達(Real Aperture Radar, RAR)。圖 2-1-1 為雷達成像幾何,其中 Vs/c 為載台飛行方向,H 為飛行高度。在雷達成像幾何中,不同於光學遙測系統的中 心透視投影,分為方位解析度與距離解析度。每一個雷達脈衝發射並接收其回 訊,產生雷達影像上的一條線,隨著飛行方向不斷前進,掃瞄線亦不斷向前推進, 沿著飛行方向之影像解析度稱為方位解析度。由於發射的波為扇形,因此距離航 線越遠之處方位解析度越差。沿著雷達波發射方向稱為距離解析度,為脈衝頻率 之函數。 圖2-1-1:雷達成像幾何[Bamler, 1999]
合成孔徑雷達著眼真實孔徑雷達的方位解析度隨著距離而變大的缺點,合成 孔徑雷達利用兩個目標點相對雷達載具具有微小的角度差,在任一觀測時刻,相 對於載具的相對速度會有所不同,因此,由這兩個目標點回來的雷達回訊將有兩 個明顯的都普勒平移量(doppler frequency shifts),根據此理論可將訊號合成產生 一個雷達長天線,以此改善雷達的方位解析力,使方位解析度不隨距離增加而變 差[林紀綱,2003]。 發射的雷達波經天線接收後,然後經過預處理,產生單視複數影像(Single Looking Complex, SLC),其中附帶相關飛行姿態(即空間位置和速度向量)和成像 雷達的系統參數。經過預處理後的 SAR 影像每一像元的記錄地表回訊的振幅大 小和相位資訊,並儲存成兩個參數I 與 Q,以複數表示,如公式(2-1),故稱之為 複數影像: ( , ) ( , ) ( , ) f x y =I x y + jQ x y …..(2-1) 其強度可由以下公式計算[Mikhail et al, 2001]: 2 2 Magnitude= I +Q …..(2-2) 雷達測量中選用不同雷達波波段對地表各有不同的回訊性質,如 P 波段 (0.5m)有較高的潛力穿透植披觀測地表,但空間解析度較差,選用波長較短的如 X、C 與 L 波段(波長在數公分左右)有較佳的空間解析度但只能觀測到植披表面, 因此選擇適當的波段對於觀測結果有莫大影響。
§2-1-1 雷達影像特性
雷達系統的成像幾何與光學影像不同,回訊強度也與微波的性質有密切關 係。影響雷達影像回訊強度的因素最重要的有以下三項,如入射角、表面粗糙度 與介電係數,茲分述如下。 A. 入射角: 入射角是影響回訊強度的主要因素之一,入射角越小則回訊強度越弱。局部 入射角則與地形有關,是由地形面的法線與雷達波的夾角形成,因此雷達影像強 度與地形坡度有關。 B. 表面粗糙度: 表面粗糙度主要由地面覆蓋物決定,當表面越粗糙時,雷達波散射的情形越 明顯。微波的波長越短,則對於表面粗糙度的變化越敏銳。若表面粗糙度的變化 量小於八分之一的波長,可以視為平滑表面[Mikhail et al, 2001],此時大部分的 能量都被反射至另一方向,僅有少部分經由散射回到天線。在缺乏散射的情況 下,平滑表面的地物在雷達影像上通常顯現為黑色。 C. 介電係數: 介電係數描述物質在電場下的反應。高介電係數物質對微波有較高的回訊, 水的介電係數約80,乾燥地表則約 3~8。當水面平靜時,通常沒有回訊,是因為 此時的水面可視同為平滑表面而產生鏡射,缺乏散射的回訊,但水面受風暴影響 時則因為水面不再是平滑表面而有較強回訊,此時是受高介電係數的性質影響 [Mikhail et al, 2001]。雷達影像為斜距投影,與光學式影像的中心透視投影有所不同,其幾何變形 與施測地形有密切相關,包括前坡縮短,疊置效應與陰影效應,分述如下: A. 前坡縮短(foreshortening): 對於面向雷達波入射方向的坡面在雷達影像上會產生壓縮現象,稱為前坡縮 短。如圖2-1-2 所示,由於雷達影像是距離測量,對於面向飛行路線的山坡上的 a, b 兩點而言天線到兩點的距離差不多,因此顯現在雷達影像上的距離 Lf比在真 實世界的坡長L(即 a b 兩點的距離)更短。其關係為: sin f L =L θ …..(2-3) 其中θ 為區域入射角,Lf為雷達影像上的距離,L 為真實坡長。 圖2-1-2:雷達影像幾何變形[Ouarzeddine, 2002] B. 疊置效應(layover effect): 疊置效應是前坡縮短的極端狀況。當雷達波俯角與地形坡度越大時,區域入 射角可能會變成負的。此時山頂與山底位置互換,出現山頭前傾的情形,是由於 天線到山頭的距離比山底更短。 C. 陰影效應(shadow effect):
雷達陰影是由於背向坡受到遮蔽而雷達波無法到達,產生完全沒有回訊的部 分。與光學影像不同的是,陰影效應產生的是絕對的黑色,如圖2-1-2 所示。背 於距離方向其坡度角αb與雷達波俯角β 滿足以下條件時會產生陰影效應[林紀 綱,2003]: b α > …..(2-4) β 若坡度角固定,則陰影長度隨著地距增加而變長。
§2-1-2 干涉合成孔徑雷達
干涉合成孔徑雷達(Interferometric Synthetic Aperture Radar, InSAR)利用一對 複數雷達影像的相位差獲取三維高程資訊,其相位差是等比例於兩個天線中心與 地表目標點之距離差。InSAR 可藉由空載或衛載進行觀測,空載雷達系統(如 NASA/JPL TopSAR 系統)以兩個天線同時觀測,可於一次飛行中同時獲得兩個不 同 觀 測 角 度 且 涵 蓋 同 一 區 域 的 SAR 影 像 , 稱 為 一 次 通 過 干 涉 (single-pass interferometry),其成像幾何如圖 2-1-3 所示。衛載 SAR 系統多使用單天線觀測, 對一個地區來說一次衛星通過只能獲得一幅 SAR 影像,衛星以一定的時間間隔 和輕微的軌道偏移(相鄰兩次軌道間隔為幾十公尺至一公里左右)重複對該地區 成像以取得像對,稱為重複通過干涉(repeat-pass interferometry) [劉國祥等, 2000],其成像幾何如圖 2-1-4 所示。 干涉圖像由相位差產生,相位差與地表高程有高度關連性[Abdelfattah et al, 2002]。干涉相位的週期為 2π,由干涉相位算取地形高程,需要求解相位未定值, 稱之為相位反演(phase unwrapping)。並需先移除地球曲率與橢球高對干涉圖像的 影響量,方可取得可用的干涉圖像。同調性影像是計算像對的常化相關係數,描 述了計算高程的不確定性。
獲取的 SAR 影像是複數格式圖元組成的二維陣列,第一維是由感測器沿著 飛行方向組成(方位),第二維是由沿著觀測方向組成(距離),相位之公式如下 [Bernhard et al, 2003]:
4
scat prop ND
π
φ
φ
φ
φ
λ
= −
+
+
+
…..(2-5) 公式(2-5)中 λ 為雷達波長,D 為感測器到地物之距離,φscat為散射時受到相 位飄移影響,φprop為經過對流層延遲的影響量,φN為雜訊影響量,如熱雜訊與 量化誤差。干涉圖像是由SAR 像對相乘產生的相位差, 1 2δφ φ φ
= −
…..(2-6) 以上是考慮重複通過干涉的情況,若為一次通過干涉,是一個雷達波發射由 另一個天線接收。在一次通過干涉中,兩個天線非常接近,大氣狀況可以視為相 同,則兩者φprop與φscat項相同,並忽略雜訊項影響,差分後的相位差方程式可簡 化為[Bernhard et al, 2003]: 2 1 4 D Dπ
δφ
λ
= − − …..(2-7) 而相位與地表高程之關係為 1 4 sin B z D φ π λ ⊥θ ∂ = ∂ ,其中B⊥ =Bzsin( )θ +Bxcos( )θ , 1 θ 是主要天線的觀測角度。由上可知 λ 越小,B⊥越大則干涉越敏感,但基線越 長會導致 SAR 像對的觀測角度差異過大而減少相關性,因此基線長度多在幾百 公尺到幾公里之間。在產生干涉圖像之前,兩張 SAR 複數影像需先經過影像套合,然後第一張 影像乘上另一張影像的共軛複數,同調性影像由相符的常化複數相關給予,干涉 圖像表示了兩幅雷達影像的相位差,相位差與斜距差δD 之關係如公式(2-8)所示: δφ=K0*δR…..(2-8) 公式(2-8)中 K0=2π/λ 為波數,λ 為波長,在一次通過系統的中為 δR=δD,在 多次通過系統中為 δR=2δD。圖 2-1-3 為一次通過干涉成像幾何示意圖,基線是 由兩個天線A1 與 A2 形成,經過嚴密測量得到,地表高程可由公式(2-10)的關係 得到[Abdelfattah et al, 2002]: 2 2 2 ( ) sin( ) 2 D D D B DB δ θ α− = + − − …..(2-9) ( ) cos( ) Z x =H−D θ …..(2-10) 然而雷達影像紀錄的是相位值,而要計算距離 D 則需要知道正確的完整波 長數(phase ambiguity,又稱相位未定值)才能計算,此一動作即為相位反演(phase unwrapping),若求解的相位未定值不正確,則會造成較大的誤差發生。 圖2-1-3:一次通過干涉成像幾何[Abdelfattah et al, 2002]
重複通過干涉成像幾何如圖2-1-4,其中航高為 H,基線長為 B,觀測角為 θ, D 為斜距,δD 為兩斜距之差,z 為地表高程,基線與水平面夾角為 α,基線的水 平與高程分量Bx 與 Bz,P(X, 0)與 P(X+x, z)分別為在參考高度上與地表上的兩 目標點。 圖2-1-4:重複通過干涉成像幾何[Abdelfattah et al, 2002] 在重複干涉幾何中,SAR 像對是由不同的飛行航線中獲取,精確的載台位 置是產生干涉圖像與計算高程的要件之一,但是在取得的星曆中多半有著一些不 確定性,這會對干涉幾何造成極大的誤差,降低 SAR 像對的同調性。衛載的多 次通過的系統中,好的相位高程轉換要求精確的軌道參數,穩定的大氣狀態,地 表物的反射特性等,才能產生高精度的DEM。
§2-2 SRTM
2000 年二月,太空梭雷達製圖任務(Shuttle Radar Topography Mission, SRTM) 是由美國NASA-JPL 與德國太空中心(DLR)、義大利太空中心共同合作,以十一 天的時間記錄了北緯60 度到南緯 57 度間所有陸地的雷達數據,並產製幾乎涵蓋 全球的數值高程模型。這是人類史上第一次使用單一感測器與單一處理標準產製 全球涵蓋的DEM,不像 GLOBE 資料集[Hastings et al, 1998]是由許多不同感測器 與觀測技術的處理成果綜合而來。 SRTM 的 DEM 成果分 1 弧秒與 3 弧秒兩種,約相當 30 公尺與 90 公尺的空 間解析度,分別稱為 SRTM-1 與 SRTM-3,而 GLOBE 資料集為 30 弧秒,相當 於一公里的空間解析度。SRTM 系統酬載在 STS-99 太空梭上,共完成 176 條軌 道的飛行,其中159 條軌道資料用於地形製圖,軌道傾角為 57 度,軌道高度 233 公里,在十一天之中觀測了1000 個帶寬,每個帶寬長度從幾百公里到幾千公里 不等,共12TB 雷達資料[Rabus et al, 2003]。對範圍內陸地 99.96%有一次取像, 94.59%有兩次取像,50%的地區有三次以上取像,其目的是以兩種不同的角度進 行觀測,以填補因遮蔽造成的資料空缺[NASA-JPL, 2003]。 在太空梭上有兩套獨立的干涉雷達系統,美國C 波段系統 SIR-C 與德國/義 大利的X 波段系統 X-SAR,在機腹上裝有共用的雷達波發射器與兩套成像雷達 天線,然後在長60 公尺的機械臂裝上另兩組天線,以 60m 機械臂作為基線,進 行干涉觀測,SRTM 同時記錄了兩個波段的雷達資料,C 波段資料由 NASA-JPL 負責處理,涵蓋了約11900 萬平方公里,X 波段資料由德國 DLR 處理,約涵蓋 5800 萬平方公里。目前網路上已公開的數據是由 NASA-JPL 負責處理的的 C 波 段 DEM,預計雷達地距複數影像與雷達斜距複數影像等數據也將在不久的未來 會提供各界下載使用[Rabus et al, 2003]。
圖2-2-1:SRTM 裝置圖[Rabus et al, 2003] SRTM 使用 InSAR 技術由兩張涵蓋相同地區的 SAR 影像利用同一目標物的 雷達回訊係數做干涉處理,可由相位差計算地物高程。大部分衛載系統需要通過 目標上空兩次觀測以上來獲取兩個 SAR 影像進行干涉,屬於重複通過干涉 (repeat-pass interferometry)。由於兩次取像時間不同,大氣狀況與濕度也不相同, 常造成 SAR 像對的相關性降低,無法產生干涉圖像。SRTM 同時使用兩組成像 雷達觀測同時取得SAR 像對,屬於一次通過干涉(single-pass interferometry),解 決了重複通過干涉的問題。
SRTM 的側視角度(off nadir angle)從 30 度至 45 度不等,觀測帶寬為 225 公里,由四個次帶寬組成,以17 度到 65 度週期性旋轉發射頭構成幾乎同步的成 像,如圖2-2-2,次帶寬 1、3 與 2、4 對不同的偏極方向(HH+VV)同時取像,因 此只需要兩個旋轉角度。圖中橘色為XV 為 X-SAR 帶寬。
在太空中基線的絕對定位是以一公尺精度的GPS 接收器進行測量,由於基
線位置的微小誤差將會直接導致DEM 誤差產生,1mm 的基線量測誤差將會導致 0.5 至 1 公尺的 DEM 高程誤差產生[Rabus et al, 2003],因此在機械臂上也裝置了 精密的追蹤器以監測基線長度變化,以達mm 級精度。
圖2-2-2:SRTM 掃瞄次帶寬組成示意圖[Rabus et al, 2003]
§2-2-1 SRTM 資料格式與特性
SRTM 資料以洲作為基礎進行處理,再經幾種預處理步驟如編輯、粗差移 除、決定水面高程與定義海岸線。再依地理座標進行切割,將成果裁切成15000 個圖幅檔案存放,每一圖幅涵蓋範圍為一經度乘一緯度。每個圖幅是由範圍內所 有資料獲取(data take)平均而得,圖幅名稱是由圖幅西南角的經緯度來命名, SRTM 數據的取樣間距為 1 弧秒或 3 弧秒,視 SRTM-1 或 SRTM-3 資料庫而不同。 SRTM-3 資料是由 SRTM-1 經 3x3 的平均遮罩產生,由 1201x1201 個點組成,高 程資料單位最小紀錄至公尺。SRTM-3 資料以洲為單位釋出,各洲資料庫涵蓋區 域如圖2-2-3 所示。而 SRTM-1 資料只釋出美國本土的資料。SRTM 資料的儲存 格式是HGT,16bit 的 binary 格式儲存,Motorola big-endian 的編碼順序,檔案 中沒有檔頭資料,以行的順序排列。沒有資料的值被標示為-32768[JPL, 2003]。 SRTM 數據下載網址為(URL: http://seamless.usgs.gov/)。圖2-2-3:SRTM 資料庫涵蓋圖 [NASA-JPL, 2003] SRTM 資料分為歐亞、北美、南美、非洲、澳洲、與其他島嶼等六個資料庫, 共涵蓋北緯60 度到南緯 57 度間全球所有陸地。而歐亞資料庫涵蓋範圍如圖 2-2-4 所示,包含了許多不同的地貌,西從不列顛群島、跨過阿爾卑斯山、西伯利亞、 到中國大陸、西藏高原、印度、東至大平洋島弧,南至印尼群島,共包含 5940 個檔案,並涵了包含歐亞大陸與太平洋與印度洋上大部分的島嶼,最高處在喜馬 拉雅山聖母峰8848 公尺。我們所研究的區域,是位於在大平洋火環的臺灣地區, 從圖2-2-5 可知,是經過二次資料獲取的地區。 圖2-2-4:歐亞資料庫涵蓋圖[NASA-JPL, 2003]
圖2-2-5:資料獲取次數圖[NASA-JPL, 2003] SRTM 的高程基準是 WGS84 EGM96 geoid,而且取得的描述面是 DSM。 NASA 公佈的資料規範絕對水平精度為 12.5 公尺,絕對高程精度為 10 公尺,在 同一個帶寬內的相對高程精度為6 公尺,約為 225 km x 255 km 的區域,這是預 期使用者進行幾何與系統誤差的改正後可達到的精度,影響相對高程精度主要為 熱誤差(thermal noise)影響。影響 SRTM 資料品質之誤差來源如圖 2-2-6 所示。 SRTM 的觀測角度為 55 度,受到陰影效應影響產生許多資料空缺點,藉由不同 方向的觀測可以有效的補足資料空缺的問題。 圖2-2-6:不同誤差來源影響量與尺度[Rabus et al, 2003]
§2-2-2 臺灣地區 SRTM 資料組成
臺灣本島的SRTM DEM 數據由十個檔案組成,列於表 2-2-1: 表2-2-1:臺灣地區 DEM 組成圖幅 SRTM 轉檔流程如附錄 A,經轉檔、接合與裁切後,臺灣地區 SRTM DEM 網格數為2384 x 4195,高程值分佈從-70 到 3917 公尺,由於 SRTM 數據也包含 海上的高程點,在使用上需先進行處理。經由去除海上高程點後,陸上高程點數 為4,638,351 點,其中資料空缺點數為 165,231 點,資料空缺率為 3.564%。 黑白暈渲圖2-2-7 中可以清楚的看出山區 SRTM 數據有較嚴重的資料空缺情 形發生,在中央山脈兩側資料空缺的發生較為頻繁,可能與坡度和觀測方向有 關,在背向坡上由於回訊較低,無法計算高程點的比例因而較高。彩色暈渲圖展 示於圖 2-2-8,河流、湖泊等陸上水體也會因鏡面反射效應而沒有回訊,而海面 上由於海風產生的海浪使的表面粗糙度較高,仍有不少回訊產生,如圖2-2-7 台 灣西岸的海面上有許多的高程資料存在。 檔案名稱 高程最小值(m) 高程最大值(m) N21E120.HGT -34 341 N21E121.HGT -19 226 N22E120.HGT -68 3035 N22E121.HGT -26 2912 N23E120.HGT -49 3917 N23E121.HGT -43 3812 N24E120.HGT -56 2439 N24E121.HGT -37 3860 N25E120.HGT -16 21 N25E121.HGT -70 1102圖2-2-7:臺灣 SRTM 資料黑白暈渲圖 (黑色部分代表高程值為 0 或資料空缺。)
§2-3 TopSAR
1996 年 11 月 30 日,臺灣參與美國 NASA/JPL『太平洋周邊國家地區實施全 偏極、多波段及干涉合成孔徑雷達計畫,PacRim』,由農委會、國立中央大學 太空及遙測研究中心與美國太空總署共同合作[陳錕山,1999],計畫中使用 AIRSAR 系統觀測臺灣北部、中部台中港與溪頭、南部墾丁四個區域。2000 年 9 月27 日,NASA/JPL 再度執行後續計畫 PacRIM-II,地區涵蓋臺灣西部、中部、 南部[林紀綱,2003]。TopSAR 為 AIRSAR 系統中之一子模式,主要目的是用來 產生高精度高解析度DEM。 圖2-3-1:DC8 飛機外觀[NASA-JPL, 2003] AIRSAR 系統酬載在 DC8 飛機上,其外觀如圖 2-3-1 所示,為左向側視 (left-looking)雷達系統,使用三種微波波段,分別是 C 波段、L 波段及 P 波段, 平均波長分別為5.6cm、23.5cm 及 68cm,其中 C 波段與 L 波段用於干涉模式。 機上雷達波發射器發射水平或垂直方向的偏極雷達波,接收器可記錄六個頻道的 回訊資料,為C、L 與 P 三個波段的水平與垂直偏極回訊[Lou et al, 1995]。再將 獲取的回訊資料以類比數位轉換器(Analog to Digital Converter)轉換成 8 位元影 像資料,AIRSAR 系統也包含一個及時處理器(real-time processor),可用來處理 這些頻道(channel)產生快覽影像(scrolling image),快覽影像可以檢查雷達影像的 品質,還可以確認觀測區域是否為目標區。DC8 機上還裝有 GPS(Global Positioning System)和 INS(Inertial Navigation System)以記錄飛機觀測姿態的位置和姿態角。GPS 部分使用 Motorola Six-Gun GPS 接收器,具有六個頻道和穩定的時鐘,Honeywell GPS 與 INS 整合式元件
(Integrated GPS and INS,IGI),具有一個小且相當靈敏的環形雷射陀螺儀,且這 個陀螺儀與GPS 接收器整合在一起,可以進行更高精度的姿態量測。這套系統 精度為κ 角精度±0.02°,ω 角精度±0.01°,φ 角精度±0.01°,每個軸向的速度精度 為±0.03m/s,絕對位置精度為±16m,需額外的處裡來獲得優於 1m 的絕對位置精 度[Lou et al, 1995]。 TopSAR 相關系統參數列於表 2-3-1,使用 C 與 L 波段來進行干涉雷達測量 產製數值高程模型。在 XTI1 模式中僅使用 C 波段進行干涉雷達測量,在 XTI2 模式中則同時用C 波段與 L 波段進行干涉,C 波段與 L 波段對植披有不同的穿 透程度,其產製之 DEM 可以用來植披研究,C 波段產製的 DEM 其精度約為 1 ~5 公尺,L 波段約為 5~10 公尺。 表2-3-1:TopSAR 系統參數[Howard, 1995] TopSAR 系統參數 航高(公尺) 8000~9000 脈衝頻率(MHZ) 600 天線長(公尺) 1.6 天線寬(公尺) 0.11 基線長(公尺) 2.58 基線角(度) 62.77 距離頻寬(MHz) 40 使用波段 C, L, P 平均波長(公分) 5.6, 23.5, 68 斜距解析力(公尺) 3.75 方位解析力(公尺) 1.2 DEM 空間解析力(公尺) 5 觀測角度(度) 20~65 帶寬(公里) 10 AIRSAR 系統中提供提供三種操作模式以供不同製圖目的使用,表 2-3-2 為 AIRSAR 操作模式,表中全偏極指同時分別發送垂直與水平方向之偏極的雷達 波,每一個回訊同時取得HH 與 VV 的資料。POLSAR 模式對水體與植披較敏感, 沿軌(along track)干涉模式 ATI 則被用來量測海洋表面,此兩個模式的目的並非
用來量測地形資訊[JPL, 2003]。 表2-3-2:AIRSAR 操作模式 產生資料 操作模式 DEM 全偏極(HH+VV) VV POLSAR 波段P, C, L TopSAR XTL1 波段C 波段P, L 波段C TopSAR XTL2 波段C, L 波段P 波段C, L ATI 波段C, L TopSAR 是以量測三維地表高程為目的。屬於叉軌(cross-track)干涉模式,意 指同時使用兩支天線接收回訊,可在一次飛航中獲取一對 SAR 像對,再經干涉 原 理 由 雷 達 影 像 之 相 位 差 計 算 高 程 資 訊 , 亦 稱 一 次 通 過 干 涉(single-pass interferometry)。
Madsen[1995]於美國加州與亞利桑納州中 Fort Irwin 與 Walnut Gulch 兩個實 驗區所做的研究中,將TopSAR 資料產生之 DEM 與傳統光學立體像對產生之資 料進行高程比對,發現兩者高程差值之RMS 值平坦區為 2.2 m;高山區則為 5.0 m ,Fort Irwin 實驗區包含高山與平坦地,高程值域為 600-1500m,高山主要組 成為花崗岩,而Walnut Gulch 實驗區則為雨量少但有一長滿青草之牧場,與一些 泥土岩粒組成的區域,高程約在1300-1600m 之間,在此實驗中中 TopSAR 資料 之高程精度在2.2~5.0 公尺之間,與 JPL 公佈之 1~5 公尺精度相符。
§2-3-1 TopSAR 資料格式
TopSAR 數據包含四個(只有 C 波段)或八個(C 與 L 波段)DEM 相關檔案,與 1 至 2 個偏極數據檔案,每一圖幅檔案組成格式如表 2-3-3 所示:
表2-3-3:TopSAR 資料格式[JPL, 2003] DEM 數據(C 波段,L 波段不一定)
Ts####_c.vvi2 C 波段 VV 強度影像 16bit 2.5 Mbytes Ts####.demi2 C 波段 DEM 16bit 2.5 Mbytes Ts####.corgr 相關係數圖 byte file 1.2 Mbytes
Ts####.incgr 區域入射角圖 byte file 1.2 Mbytes 偏極數據
Ts####_l.datgr L 波段偏極影像 compressed Stokes matrix
15 Mbytes Ts####_p.datgr P 波段偏極影像 compressed Stokes
matrix
15 Mbytes
其中高程資料.demi2 檔以 16bit 數值、BIL 方式儲存,需要由以下公式換算 實際高程:
H =高程增量* DN +高程起始值
高程增量與高程起始值可由檔頭參數中找到,DN 為.demi2 檔案中 16bit 數 值,TopSAR 的高程資料基準為 WGS84 EGM96 geoid,是以 EGM96 全球大地位 模式計算全球大地起伏模式。
本研究處理過程以ENVI 軟體讀取.demi2 檔案並轉出成 ASCII 格式方便後續 計算。由於輸出之ASCII 格式檔案是以 BIL 方式儲存 DN,因此必須由檔頭之四
個角點座標計算每一個點的座標。作法是先將四個角點之經緯度轉成TWD97 二
圖 2-3-2:TopSAR 高程資料 BIL 格式轉 XYZ 示意圖 2 1 4 1 , 1
1
1
i jx
x
x
x
x
x
i
j
M
N
−
−
= + ×
+ ×
−
−
2 1 4 1 , 1 1 1 i j y y y y y y i j M N − − = + × + × − − i,j 0z =DN
× ∆
h+h
(x1,y1) (x2,y2) (x3,y3) (x4,y4)為圖 2-3-2 中四個角點之座標,i, j 為 BIL 格式 中的位置,M 為每條掃瞄線之點數,N 為掃瞄線之數量,∆ 與h h 為檔頭資料中0 高程增量與高程起始值,並以第三角點作為檢核轉換之檢核,關係如下: dx3=x3’-x3 dy3=y3’-y3 其中dx3 與 dy3 為第三角點推算第三角點之座標與原始座標比較作為檢核角 點座標之用。並計算轉換後之網格大小。在轉換過程中發現,實際轉換出來的網 格大小約為4.999m。
§2-3-2 臺灣地區 TopSAR 資料組成
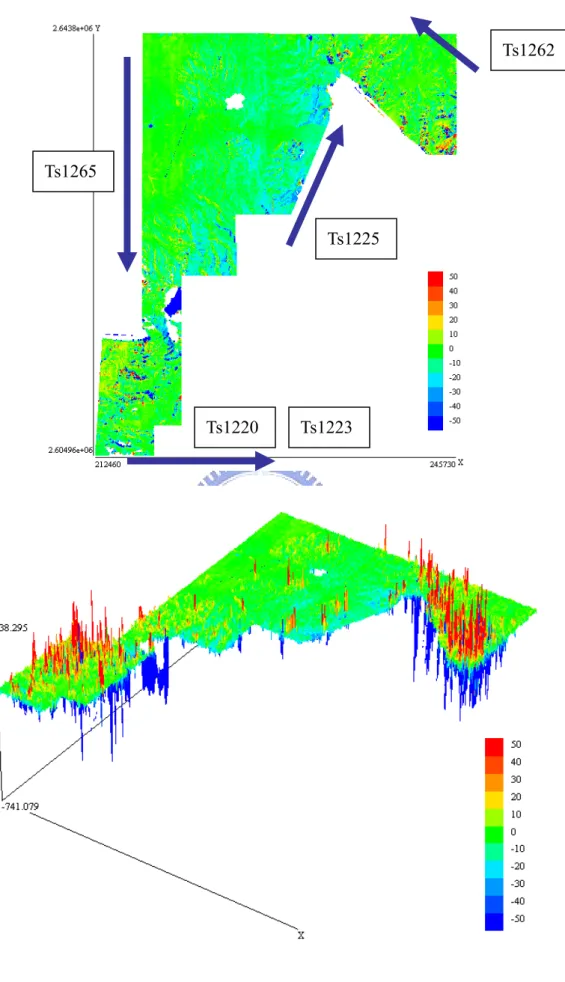
臺灣目前擁有之TopSAR 資料共為 21 幅,包含 PacRIM-I 12 幅與 PacRIM-II 9 幅,整理於表 2-3-4,皆可由(Url:http://airsar.jpl.nasa.gov/cgi-bin/search.plex)下載。 1996 年觀測的 PacRIM-I 數據為 10 公尺解析度,其處理品質較不穩定,本文主 要研究PacRIM-II 的數據,DEM 解析度為五公尺。其中 Ts1250、Ts1265 與 Ts1456 有C 與 L 波段的 DEM。 圖2-3-3:PacRIM-II 涵蓋區域 表2-3-4: 臺灣地區TopSAR 高程資料簡表 檔名 獲取日期 波段 解析度 Ts0259 30-NOV-96 C 10m Ts0388 30-NOV-96 C 10m Ts0530 30-NOV-96 C 10m Ts0537 30-NOV-96 C 10m Ts0538 30-NOV-96 C 10m Ts0539 30-NOV-96 C 10m Ts0540 30-NOV-96 C 10m Ts0541 30-NOV-96 C 10m Ts0542 30-NOV-96 C 10m Ts1104 30-NOV-96 C, L 10m Ts1105 30-NOV-96 C, L 10m Ts1107 30-NOV-96 C, L 10m Ts1215 27-SEP-00 C 5m Ts1220 27-SEP-00 C 5m Ts1223 27-SEP-00 C 5m Ts1225 27-SEP-00 C 5m Ts1250 27-SEP-00 C, L 5m Ts1262 27-SEP-00 C 5m Ts1265 27-SEP-00 C, L 5m Ts1456 27-SEP-00 C, L 5m
PacRIM-II 的涵蓋範圍如圖 2-3-3 所示,集中在台灣中部,主要涵蓋縣市有 苗栗縣、台中縣市、南投縣、雲林縣等,目的是對921 大地震後對於災情較嚴重 的區域提供研究與測試數據。 經轉換後之PacRIM-II 資料列於表 2-3-6,第三角點檢核的 dx, dy 差值來看, 大多數的資料都在2 公尺以內。以 5 公尺的解析度來看,對第三角點的影響在次 像元等級內,唯獨Ts1250L 與 Ts1265L 這兩個資料的 dx 差值在 50 公尺左右, 檢查其高程最低值也極不合理,位於-1000 公尺上下,但檢視其檔頭資料這兩個 資料的高程起始值分別為-920.9 與-1042.6,推測應是 NASA/JPL 處理過程的錯誤 造成錯誤的檔頭參數,因此在後續分析上將不使用這兩組品質較差的數據。 表2-3-5 中空缺率的計算方式是從 DN 影像中計算 DN 值為-16384 的點數, 亦即無法計算高程的點,再除以全部點數可得,實驗資料中空缺率在 5~28%之 間,可以注意到地勢較高的數據如Ts1220、Ts1223,Ts1456 其空缺率較高,可 達19%~28%左右,而地勢較低的數據如 Ts1250 則空缺率僅為 5.12%。 表2-3-5:PacRIM-II 高程資料轉換成果檢核(m) 檔名 高程最小值 高程最大值 第三角點 dx 第三角點 dy 空缺率 Ts1215 -21.10 1304.80 1.51 -0.81 7.70% Ts1220 10.20 2863.80 0.39 0.01 19.46% Ts1223 73.2 3168.47 -0.63 1.13 18.76% Ts1225 -71.2 1406.15 -0.17 0.75 9.80% Ts1250C -73.20 867.08 0.43 -1.61 5.12% Ts1250L -920.90 1082.70 -50.61 -0.39 7.25% Ts1262 -128.60 2172.37 -0.94 0.77 9.90% Ts1265C -124.10 2807.49 0.65 -0.47 8.42% Ts1265L -1042.60 4542.847 -51.41 -0.41 9.39% Ts1278 -136.40 894.48 1.07 0.83 10.2% Ts1456C 398.1 2898.46 0.93 -0.32 26.85% Ts1456L 331.10 3041.34 0.34 -0.32 27.52%
§2-4 參考航空攝影測量數據
參考資料使用內政部的921 緊急製圖成果 DEM,以下簡稱為 RefDEM,獲 取於1999 年 921 大地震後在臺灣中部災區所拍攝兩萬分之一的黑白航空相片, 航高從地面起算約3000 公尺,拍攝時相機焦距為 15 公分,前後重疊 65%,航帶 重疊30%,以解析攝影測量方式產製 5 公尺間距等高線,再轉成 20 公尺間距的 DEM,以 ASCII 檔案儲存 XYZ,圖幅 9520 主要位於南投縣與嘉義縣之間,共 110 幅,2,026,058 個高程點,如圖 2-4-2。圖幅 9521 主要位於台中縣,共 90 幅, 1,670,621 個高程點,繪製等高線圖 2-4-3。涵蓋分佈圖如圖 2-4-1 所示,平面系 統是TWD97 二度分帶系統,高程系統為正高。 RefDEM 的平面精度規範為 90%的檢核點誤差在 2.5 公尺內,剩下 10%其誤 差在5 公尺以內。高程精度規範為 90%的誤差在 2.5 公尺內,剩下 10%誤差不能 超過5 公尺。 圖2-4-1:參考航空攝影測量數據涵蓋範圍
圖2-4-2:參考航測資料於圖幅 9520 兩百公尺等高線圖
第三章 高程數據比對
§3-1 實驗數據描述
高程比對的實驗區選定依照參考航空攝影測量數據涵蓋劃分為9520 與 9521 兩個實驗區,範圍如表3-1-1 所列。9520 實驗區東西寬為 38.38 公里,南北長 38.83 公里,涵蓋範圍如圖 3-1-1,大部分在南投縣,並涵蓋彰化縣、雲林縣與嘉義縣 些許地區。實驗區內的TopSAR 資料有 Ts1215、Ts1220、Ts1223、Ts1225、Ts1262、 Ts1265、Ts1456 共六幅 DEM。 圖3-1-1:9520 實驗區範圍(底圖取自 Papago 電子地圖) 表3-1-1:實驗區範圍與參考 DEM 高程範圍(m)實驗區 Max E Min E Max N Min N Max H Min H
9520 245720 207340 2643800 2604970 1687.450 3.210 9521 245740 212680 2690860 2660400 1250.215 19.942
9521 實驗區東西寬 33.06 公里,南北長為 30.46 公里。涵蓋範圍如圖 3-1-2, 以台中縣市為主,值得注意的是部分台中都會區在9521 實驗區範圍內,實驗區 內的TopSAR 數據為 Ts1250、Ts1265、Ts1278 三幅資料,共計四幅 DEM,各實 驗區有效高程點數統計列於表3-1-2。 圖3-1-2:9521 實驗區範圍(底圖取自 Papago 電子地圖) 表3-1-2:實驗區高程點數統計 由RefDEM 計算實驗區內之坡度整理於表 3-1-3,9520 實驗區坡度 30 度以 上地區占57%,9521 實驗區僅占 27%,相較 9521 實驗區,9520 實驗區包含較 多地形起伏較大的區域。 表3-1-3:坡度面積比率表 0 度至 15 度 15 度至 30 度 30 度至 45 度 45 度以上 9520 實驗區 14.88% 28.05% 41.86% 15.02% 9521 實驗區 43.60% 29.46% 23.19% 3.79% 數據簡稱 9520 實驗區 9521 實驗區 SRTM 188,995 128,812 TopSAR 74,074,196 33,409,520 RefDEM 2,026,058 1,670,621
§3-2 比對流程
比對流程中使用的三種資料相關參數如表3-2-1 所列,由於這三種資料使用 的平面系統與高程系統和航空攝影測量數據不同,因此這些資料必須轉換至同一 座標系統才能進行比較,地圖投影轉換工具使用 Proj 程式[Evenden,1995]進行 投影轉換計算,proj 投影正算與反算一次的平均絕對誤差約在 0.3 公尺左右,程 式計算的可逆性極高[史天元,2000],對本研究最小 DEM 網格五公尺解析度而 言影響有限,因此以Proj 進行 WGS84 經緯度轉 TWD97 二度分帶計算,將 SRTM 與TopSAR 經緯度數據轉換至 TWD97 二度分帶系統。 表3-2-2:SRTM、TopSAR 與參考攝影測量數據簡表 SRTM TopSAR RefDEM 觀測時間 2000 年 2 月 2000 年 9 月 1999 年 10 月 航高 223000m 8500m 3000m 解析度 90m 5m 20m 高程精度 16m 1~5m * 水平精度 20m 10m * 平面系統 WGS84 經緯度 WGS84 經緯度 TWD97 高程系統 EGM96 geoid EMG96 geoid 正高描述表面 DSM DSM DEM
(*注:參考航空攝影測量數據精度規範詳見§2-4)
在高程系統轉換方面,SRTM 與 TopSAR 使用的是 WGS84 EGM96 geoid, 是由EGM96 地位模式計算全球大地起伏,台灣使用的正高系統也是參考 EGM96 作為長波長部分進行進一步的測量與計算而成[黃金維,2003],兩系統的差異應 不大,因此將直接進行比對。
經過平面系統轉換與高程系統確認後,將所有資料轉成XYZ 儲存,以點為 單位進行處理,先經過資料空缺濾除的處理將無效值去除,再將高程值為負的高 程點移除,由於本實驗區9520 與 9521 確定區域皆在陸地上,其高程值不應該為 負值,而在TopSAR 資料中有不少高程點為負值。為不影響實驗成果,先將這些 明顯的粗差點濾除,高程比對示意圖如圖3-2-2 所示。 圖3-2-2:高程比對流程 高程資料比對方式是使用以點為基礎的搜索,先將所有高程資料依照 E 值 然後 N 值排序後,再逐點以二分搜尋法於參考高程資料尋找相同點,為減少計 算量,以參考資料網格大小作為條件,如圖3-2-3 所示,亦即若搜尋點在參考點 的網格內,視兩者為相同點進行比較,然後輸出參考資料之平面座標與高程差 值。本研究如表 3-2-2 依照 DEM 網格間距大小對 SRTM、TopSAR 與參考航空 攝影測量數據進行高程比對。 平面系統轉換 平面系統:TWD97 高程系統:正高 RefDEM TOPSAR SRTM 粗差分析 系統誤差分析 隨機誤差分析 濾除不合理點 高程點搜索與比對
圖3-2-3:搜索方式
表3-2-2:高程比對關係
簡寫 搜尋數據 被搜索數據
SRTM-Ref SRTM RefDEM Ref-TS RefDEM TopSAR SRTM-TS SRTM TopSAR
§3-3 視覺比較
圖3-3-1 與圖 3-3-2 分別為兩實驗區的黑白暈渲圖,皆以 Surfer 軟體[Golden software,2003]將高程點 XYZ 資料以最小曲率法[Wessel, 1999]內插成五公尺網
格繪製而成,圖中可以看出 SRTM 資料受限於原始資料解析度而描述的地形面 較為平滑,值得注意的是在山區出現補丁狀的整齊排列,經進一步檢查發現,這 些補丁點間格相距約 90 公尺,推測試與 SRTM 的原始點位置由 90 公尺間距內 插成5 公尺網格造成,與最小區率內插法有關。 圖3-3-1:9520 實驗區黑白暈渲圖部分,範圍在(220000, 2631000)、(230000, 2634000)之間,大小約 10km x 3km。由上而下依序為 SRTM、TopSAR、RefDEM。
圖3-3-2:9521 實驗區黑白暈渲圖部分,範圍在(218000, 2632000)、(227000, 2634000)之間。大小為 9km x 2km。由上而下依序為 SRTM、TopSAR、RefDEM。 由於TopSAR 與 SRTM 主要使用 C 波段的雷達波,觀測面為地物覆蓋表面, 亦即 DSM。SRTM 資料由於解析力較低,地物覆蓋情形較難以視覺判讀,而 TopSAR 五公尺資料在圖 3-3-2 中與參考航空攝影測量數據相較,則可明顯看出 地物覆蓋,在左半部市區呈現較粗糙的表面,而參考航空攝影測量數據則相對上 平滑許多。 這三組資料所描述的趨勢面是一致的,但在山區 TopSAR 資料品質明顯較 差,如圖 3-3-1 中 9520 實驗區 TopSAR 資料由視覺觀察下看出。可能原因與山 區植披、坡度有關。 圖3-3-3:9520 實驗區剖面線位置圖(底圖為 PapaGo 電子地圖)
圖3-3-4:9520 實驗區剖面線圖,起點(213112, 2606837),終點(215347, 2606837) 圖3-3-4 為 9520 實驗區中三組資料組成 TIN 後所擷取的剖面線圖,相關位 置圖繪於圖 3-3-3,剖面線圖可以顯示三組資料的特性,TopSAR 資料由於高解 析度包含較多的高頻資訊,但許多地形起伏過於急遽的數據未必是正確的地形訊 息,震盪情形十分明顯。SRTM 相對於參考資料 RefDEM 由於其取樣頻率之限 制而有平滑地表的現象。RefDEM 的剖面線則較為合理。這也是因為 SRTM 與 RefDEM 是經過編修的資料,包含粗差較少,而 TopSAR 資料是自動處理完後直 接釋出、未經過編修的原始資料,因此包含許多自動處理造成的粗差與不合理的 高程點。 TopSAR SRTM RefDEM
§3-4 精度分析
精度分析中使用四個指標,分別為平均誤差(Mean Error),平均絕對誤差 (Mean Absolute Error, MAE),均方根誤差(Root Mean Square Error, RMSE)與無偏 標準差(Standard Deviation, SD),其定義如下; 1. 平均誤差(Mean Error); di ME n =
∑
2. 平均絕對誤差(MAE); AE di M n =∑
3. 均方根誤差(RMSE); 2 RMSE di n =∑
4. 無偏標準差(SD);(
)
2 i d SD n µ − =∑
若差值屬於隨機誤差,則其平均應為零,並且服從常態分布。因此當差值為 隨機誤差並屬於常態分佈時,而平均誤差不為零,表示兩個描述面存在著一系統 偏差,而將顯現在平均誤差指標上。 平均絕對誤差則可用來與平均誤差對照,顯示差值得正負號分布情形,若平 均誤差為零,MAE 為五公尺,則顯示正負誤差的大小一致。若 MAE 與平均誤 差一樣,則顯示差值都是同一符號。 均方根誤差為表現精度的常用方法之一,無偏標準差則是扣除掉平均誤差後 計算的標準差,不受系統偏差的影響。因此一般來說,RMSE 會比 SD 來的大。 表3-4-1:9520 實驗區高程比對差值統計(m)9520 實驗區 Points Mean Error MAE RMSE SD Max Error SRTM-Ref 88,802 4.923 7.184 10.655 9.451 139.000
Ts-Ref 1,670,593 4.033 10.885 25.266 24.941 1364.800 Ts-SRTM 157,569 -0.316 12.948 28.219 28.217 901.500
表3-4-2:9521 實驗區高程比對差值統計(m)
9521 實驗區 Points Mean Error MAE RMSE SD Max Error SRTM-Ref 73,267 5.188 5.817 7.839 7.579 91.740 Ts-Ref 962,967 0.618 4.437 8.700 8.678 501.960 Ts-SRTM 58,167 -3.457 6.667 9.185 7.035 -202.200 經由比對後 9520 與 9521 實驗區的誤差統計結果分別列於表 3-4-1 與表 3-4-2,經比對發現,SRTM、TopSAR 與 RefDEM 的平均誤差並不為零,顯示 SRTM 與 TopSAR 數據之描述面與參考數據之間存在著系統偏差值,SRTM 與參 考數據的偏差值約為4.923 公尺與 5.188 公尺。TopSAR 則為 4.033 公尺與 0.618 公尺。 SRTM 的描述面明顯普遍高於 RefDEM 約五公尺,可能的因素為高程系統 的些許差異造成,或與植批覆蓋的高度有關。以精度來看,9.451 公尺的無偏標 準差合乎NASA-JPL 公佈之 90%信心區間(標準差的 1.6 倍)16 公尺精度。9521 實驗區的精度更佳,其無偏標準差可達 7.579 公尺,換算至 90%信心區間約為 12.126 公尺。 TopSAR 整體數據品質與預期差異較大,在 9520 實驗區其 RMSE 為 25 公 尺,9521 實驗區則為 8 公尺,均較資料規範中的 1~5 公尺誤差範圍來的大,在 地形陡峭的9520 實驗區中精度明顯不佳,較平坦地較多的 9521 實驗區的 RMSE 大了將近三倍,最大差值可達1346 公尺。
圖3-4-1:9520 實驗區 TopSAR 差值分佈圖 Ts1220 Ts1223
Ts1225
Ts1262
圖3-4-2:9521 實驗區 TopSAR 差值分佈圖 Ts1250
圖3-4-5:9520 實驗區 TS-SRTM 差值分佈圖 Ts1220 Ts1223
Ts1225
Ts1262
圖3-4-6:9521 實驗區 TS-SRTM 差值分佈圖 Ts1250
§3-4-1 TopSAR 各幅數據精度分析
分別對每一幅 TopSAR 數據進行比對結果整理於表 3-4-3 與表 3-4-4,總體 TopSAR 數據的差值平均值為 4.033 公尺(9520 實驗區)與 0.618 公尺(9521 實驗 區),而不同幅的 TopSAR 數據其平均誤差也各不相同,從-4.404 公尺到 6.406 公 尺不等,顯示不同航帶的數據的系統誤差各異,可能是載台之定位誤差或是粗差 影響了平均誤差。各幅數據的最大誤差多在200 公尺至 500 公尺之間,最大可達 1000 公尺以上。 各幅TopSAR 數據無偏標準差多介於 6.770 公尺至 32.317 公尺之間,在多山 區的9520 實驗區的無偏標準差則在 13.668 到 32.317 公尺之間,無偏標準差大於 30 公尺的數據有 Ts1220、Ts1223、Ts1262 等三幅。而多平地的 Ts1278c 與 Ts1250c 其無偏標準差則為6.770 公尺與 9.033 公尺,精度表現明顯較佳,並較接近資料 規範的五公尺精度。 表3-4-3: TopSAR 各數據與 RefDEM 分析統計表(m)Points Mean Error MAE RMSE SD Max Error Ts1220c-Ref 185,543 -4.404 16.923 31.386 31.075 630.100 Ts1223c-Ref 187,470 5.084 14.387 31.959 31.551 752.010 Ts1225c-Ref 407,779 5.067 7.963 14.577 13.668 926.890 Ts1262c-Ref 188,471 0.229 12.094 32.318 32.317 1364.801 Ts1265c-Ref 701,330 6.406 9.722 24.139 23.273 445.040 Ts1250c-Ref 766,079 0.106 4.448 9.034 9.033 501.960 Ts1278c-Ref 196,888 2.612 4.397 7.257 6.770 243.710 而在兩組InSAR 數據的相互比對中,9520 實驗區 SRTM 數據與總體 TopSAR 數據的差值平均為0.316 公尺,最大相對差值平均的數據為 Ts1220,達 8.545 公
尺,而最小則為Ts1225,僅 0.536 公尺。SRTM 的描述面普遍高於 TopSAR 數據, 僅 Ts1265 例外。兩組數據的無偏標準差則為 28.217 公尺(9520 實驗區)與 7.035 公尺(9521 實驗區),在平地的相互比對精度比較高,而山區則明顯較低,在航空 攝影測量數據比對下精度較差的幾幅數據如Ts1220、Ts1223、Ts1262 在相互比 對中精度分析同樣較差。 表3-4-4:TopSAR 各數據與 SRTM 比對統計表(m)
Points Mean Error MAE RMSE SD Max Error Ts1220c-SRTM 33,416 -8.545 18.866 34.924 33.862 555.300 Ts1223c-SRTM 33,759 -1.033 14.297 34.689 34.673 878.000 Ts1225c-SRTM 21,294 -0.536 6.860 13.530 13.520 901.500 Ts1262c-SRTM 9,123 -6.002 14.511 32.423 31.862 581.000 Ts1265c-SRTM 53,184 3.178 10.100 22.723 22.500 583.400 Ts1250c-SRTM 44,521 -4.146 6.079 7.706 6.496 209.200 Ts1278c-SRTM 13,646 -1.211 4.964 8.259 8.170 202.200
§3-4-2 不同坡度精度分析
InSAR 測量成果與施測的地形坡度有密切關係,對不同坡度的 SRTM 與 TopSAR 數據進行分析的成果列於表 3-4-5 與表 3-4-6,結果發現 SRTM 與 TopSAR 數據的精度明顯與坡度有關,SRTM 在越平坦的地形精度最佳,坡度越大則精度 愈差。SRTM 在不同實驗區時相同坡度的精度非常一致。 表3-4-5:SRTM 於不同坡度精度分析(m)SRTM Slope Points Mean Error SD
9520 實驗區 0~15 degree 50,863 3.510 6.698 15~30 degree 19,293 7.523 11.735 30 degree above 122 19.986 35.111 9521 實驗區 0~15 degree 54,336 4.454 6.1643 15~30 degree 17,220 7.608 10.495 30 degree above 76 9.930 27.039 圖3-4-7: SRTM 誤差與坡度散佈圖,左圖為 9520 實驗區,R=0.30。右圖為 9521 實 驗區,R=0.22。
TopSAR 數據的精度也呈現相同的趨勢,其誤差隨著坡度而逐漸增大,坡度 大於30 度的高程點之無偏標準差為 100 公尺,顯示坡度較高的高程點包含較多 的粗差。即使是在平坦地區,如9520 實驗區中坡度小於 15 度的高程點其精度為 15.450 公尺,依然無法達到資料規範中的 5m 精度要求。 在坡度超過30 度的高程點中,其誤差平均亦較大,在 9520 實驗區中為-17.970 公尺,顯示多為向下的粗差,而9521 實驗區的粗差則多為向上的粗差。 誤差與坡度的散佈圖繪於圖 3-4-8。在兩實驗區中相同坡度的精度差異依然 很大,顯示在兩實驗區中精度表現差異並未完全與坡度有關。 表3-4-6:TopSAR 數據於不同坡度精度分析(m)
TopSAR Slope Points Mean Error SD
9520 實驗區 0~15 degree 1,063,673 -3.233 15.450 15~30 degree 495,564 -4.925 34.235 30 degree above 4,714 -17.970 57.930 9521 實驗區 0~15 degree 828,253 -0.447 7.428 15~30 degree 120,001 -1.840 14.238 30 degree above 171 15.823 100.622 圖3-4-8: TopSAR 誤差與坡度散佈圖,左圖為 9520 實驗區,R=0.07,右圖為 9521 實驗區,R=0.11。
§3-5 粗差分析
經上節比對後發現TopSAR 資料相較其他兩組資料含有大量粗差,而最大差 值可達1000 公尺以上。由於 TopSAR 系統的系統精度規範為 1~5 公尺,而在上 節分析中TopSAR 資料包含大量 100 公尺以上的殘差,這些殘差不應被視為隨機 誤差的集合,而需以粗差看待。 為剔除粗差的影響,以差值得三倍無偏標準差作為剔除粗差的門檻,將差值 在 99.7%信心區間外視為粗差,剔除粗差後之統計表列於表 3-5-1 與表 3-5-2, TopSAR 平均誤差變動不大,而 9520 實驗區的無偏標準差由 24.941 公尺降為 12.383 公尺,與林紀綱[2003]在高山區檢驗的 10~15 公尺的隨機誤差相符,對 於平地較多的9521 實驗區則粗差對標準差影響較小,因為其粗差發生比率僅為 9520 實驗區之四分之一左右,粗差濾除後可達 5.603 公尺的精度,已經優於 SRTM 的精度。 由粗差比來看,取三倍中誤差應會濾除 0.3%的高程點,然而在地勢陡峭的 9520 實驗區中濾除率皆在 1.35%至 1.40%之間,為期望值 4.5 倍,除了在地勢平 緩的9521 實驗區 TopSAR 粗差比率較低外,其餘兩者都在 1.4%以上。 表3-5-1:9520 實驗區移除粗差後差值統計表(m)9520 實驗區 Points Mean Error SD Filt.Points Filt. Ratio SRTM-Ref 87,536 4.481 7.997 1,266 1.425%
Ts-Ref 1,647,462 2.786 12.383 23,131 1.385% TS-SRTM 155,437 -1.339 15.211 2,132 1.353%
表3-5-2:9521 實驗區移除粗差後差值統計表(m)
9521 實驗區 Points Mean Error SD Filt.Points Filt. Ratio SRTM-Ref 72,171 4.902 6.575 1,096 1.496%
Ts-Ref 958,938 0.636 5.603 4,029 0.418% TS-SRTM 56,988 -3.145 5.835 1,179 2.027%
經由粗差濾除的高程點之部分與 RefDEM 組成的 TIN 套疊之後顯示於圖 3-5-1 與圖 3-5-2,可以發現 SRTM 與航空攝影測量數據的粗差發生大多在地形變 動較劇烈的地方,由與取樣頻率不足導致較大的差值。TopSAR 資料在同樣在山 區容易有粗差發生,而更傾向包含一些系統誤差,如圖3-4-7 左邊一排黃色點皆 是高程差值達100 公尺以上的高程點組成。在 9521 實驗區左邊的平坦區包含部 分台中市區,擁有較多的地物覆蓋,這些粗差也可能是描述面不同引起。 圖3-5-1:9520 粗差分佈圖部分,在(217201, 2643232) (238634, 2627821)之間 圖3-5-2:9521 粗差分佈圖部分,在(217658, 2678390) (237507, 2664240)之間
§3-5-1 各幅 TopSAR 粗差分析
對各幅TopSAR 數據分別進行分析,發現濾除率與精度有直接的關係,濾除 率較高的數據其精度通常較差,三幅粗差比在1.5%以上的數據其精度都差於 30 公尺,濾除後也在精度15 公尺以上。大致上以 SRTM 做為參考時濾除率均較表 3-5-3 為高,如 Ts1223 其濾除比可達 5.083%,Ts1262、Ts1265、Ts1250 均在 2% 以上。 表3-5-3:TopSAR 各幅數據粗差移除後差值統計表(m)9520 實驗區 Points Mean Error SD Filt.Points Filt. Ratio Ts1220c-Ref 181,948 -4.558 19.140 3,595 1.938% Ts1223c-Ref 183,727 3.456 17.145 3,743 1.997% Ts1225c-Ref 404,145 4.807 8.522 3,634 0.891% Ts1262c-Ref 185,466 -1.080 15.358 3,005 1.594% Ts1265c-Ref 693,505 4.444 9.685 7,825 1.116% Ts1250c-Ref 763,350 0.177 5.697 2,729 0.356% Ts1278c-Ref 195,169 2.429 4.807 1,719 0.873% 表3-5-4: TopSAR 相對於 SRTM 比對粗差移除後差值統計表(m) 9521 實驗區 Points Mean Error SD Filt.Points Filt. Ratio Ts1220c-SRTM 32,812 -9.518 18.799 604 1.808% Ts1223c-SRTM 32,043 -1.087 12.035 1,716 5.083% Ts1225c-SRTM 21,273 -0.585 9.326 21 0.099% Ts1262c-SRTM 8,891 -6.903 13.469 232 2.543% Ts1265c-SRTM 52,070 1.719 10.731 1,114 2.095% Ts1250c-SRTM 43,074 -3.693 5.544 1,447 3.250% Ts1278c-SRTM 13,471 -1.021 5.953 175 1.282%
![圖 2-2-1:SRTM 裝置圖[Rabus et al, 2003] SRTM 使用 InSAR 技術由兩張涵蓋相同地區的 SAR 影像利用同一目標物的 雷達回訊係數做干涉處理,可由相位差計算地物高程。大部分衛載系統需要通過 目標上空兩次觀測以上來獲取兩個 SAR 影像進行干涉,屬於重複通過干涉 (repeat-pass interferometry)。由於兩次取像時間不同,大氣狀況與濕度也不相同, 常造成 SAR 像對的相關性降低,無法產生干涉圖像。SRTM 同時使用兩組成像 雷達觀測同時取得 SAR](https://thumb-ap.123doks.com/thumbv2/9libinfo/7909490.156409/29.892.181.718.116.446/載系統需要通目標上空兩次觀測以上來獲取兩進行性降低無法產生干.webp)
![圖 2-2-2:SRTM 掃瞄次帶寬組成示意圖[Rabus et al, 2003] §2-2-1 SRTM 資料格式與特性 SRTM 資料以洲作為基礎進行處理,再經幾種預處理步驟如編輯、粗差移 除、決定水面高程與定義海岸線。再依地理座標進行切割,將成果裁切成 15000 個圖幅檔案存放,每一圖幅涵蓋範圍為一經度乘一緯度。每個圖幅是由範圍內所 有資料獲取(data take)平均而得,圖幅名稱是由圖幅西南角的經緯度來命名, SRTM 數據的取樣間距為 1 弧秒或 3 弧秒,視 SRTM-1 或 SRTM](https://thumb-ap.123doks.com/thumbv2/9libinfo/7909490.156409/30.892.200.707.120.708/與特性裁切個圖幅檔案存放每一圖幅涵蓋範圍為圍內所經緯取樣間距.webp)

![表 2-3-3:TopSAR 資料格式[JPL, 2003] DEM 數據(C 波段,L 波段不一定)](https://thumb-ap.123doks.com/thumbv2/9libinfo/7909490.156409/38.892.164.747.300.732/表233TopSAR資料格式JPL23DEM數據C波段L波段不一定.webp)