Cooperative Spectrum Sensing Using a Weighted
Fusion Rule for Cognitive Radio Networks
Cooperative Spectrum Sensing Using a Weighted Fusion Rule
for Cognitive Radio Networks
Student: Mong-Zhe Lee
Advisor: Prof. Tsern-Huei Lee
A Thesis
Submitted to Institute of Communication Engineering Collage of Electrical Engineering and Computer Science
National Chiao Tung University in Partial Fulfillment of Requirements
for the Degree of Master of Science
in
Communication Engineering June 2011
Hsinchu, Taiwan, Republic of China
Cooperative Spectrum Sensing Using a Weighted Fusion Rule
for Cognitive Radio Networks
Student: Mong-Zhe Lee Advisor: Prof. Tsern-Huei Lee
Institute of Communication Engineering National Chiao Tung University
Abstract
In cognitive radio (CR) networks, because the distance of every CR user and the primary user is different, a signal may have interference and attenuation that affect the sensing ability of CR users. A CR user in mal-function or being hacked also results in wrong decision. Cooperative spectrum sensing is a way to decrease the probability of miss detection and the probability of false alarm. Therefore, the fusion rule is remarkably important. A good fusion rule is suitable for various circumstances because it can decrease significantly error probability. The error rate of existing data fusion techniques, such as OR rule, AND rule, and Majority rule, are still not satisfactory. Consequently, a weighted fusion rule is proposed so that reliable CR users are given higher weights. It still makes better decision under unstable networks. Hence in this thesis, we propose a weighted fusion rule that differs from previous weighted fusion rule. It can decrease the probability of wrong decision in unknown and changing networks. Furthermore, CR networks have higher throughput under the promise of avoiding interference to the primary user.
meeting NTL CR book 2011 6
Contents
………..…... i Abstract ………...……….. ii …….……..……….. iii Contents …….……….. ………… iv List of Tables ……….... v List of Figures ……….. vi Notation ……….... vii Chapter 1 Introduction …...………... 1 Chapter 2 Background ...………... 32.1 Local Spectrum Sensing …..………... 3
2.2 Cooperative Spectrum Sensing ………... 5
2.3 Existing Data Fusion Techniques ………... 6
2.4 Throughput ……….…… 7
Chapter 3 Related Works ………. 10
3.1 Weighted Fusion Rule .……….………. 10
3.2 SPRT and WSPRT ……….……… 12
Chapter 4 Proposed Weighted Fusion Rule ………... 14
Chapter 5 Simulation Results ……….. 19
Chapter 6 Conclusion ……….. 27
Contents of Table
Table 1:Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 50% of CR users and bad-sensing-accuracy CR users accounting for 50% of CR users ………..… 24 Table 2: Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 60% of CR users and bad-sensing-accuracy CR users accounting for 40% of CR users ……….….… 25 Table 3:Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 70% of CR users and bad-sensing-accuracy CR users accounting for 30% of CR users ………..… 25
Contents of Figure
Figure 1:System model of cooperative spectrum sensing in a cognitive network ….…...….. 5
Figure 2:Error probability of various thresholds for k-out-of-n rule ………...…. 7
Figure 3:The framework of 802.22 ………..………...… 8
Figure 4:The relation of the throughput and the sensing time ………....…… 9
Figure 5:Four weights are generated due to three thresholds .……….……….…. 11
Figure 6:The system model of a proposed weighted fusion rule …...………...… 15
Figure 7:Recursive procedure of weight ………..……...……….……. 17
Figure 8:Error probability under different proportion β ………...……….. 19
Figure 9:Error probability when the threshold 1 ( ) 2 N i i x N N ω ε = =
∑
of the fusion rule .……... 20Figure 10:Error probability when the threshold 1 ( ) 3 N i i x N N ω ε = =
∑
of the fusion rule …….. 21Figure 11:Error probability of CR users with 90% and 40% sensing accuracy ……..…….. 22
Figure 12:Error probability of CR users with 90% and 10% sensing accuracy ………...…. 22
Figure 13:Error probability of CR users with 80% and 10% sensing accuracy ………..….. 23
Figure 14:The performance of WSPRT and our proposed weighted fusion rule under different proportion of hackers …………..………....……... 26
Notation
N :the number of CR users
x :sensing round
i
E :energy of detecting the primary user at a CR user
n
W :decision variable
λ:a threshold of a CR user
( )
i
I x :a decision of a CR user
( )
i x
ω :a weight of a CR user’s decision β:the proportion of historical decisions ε :the threshold of the fusion center
( )
B x :a decision of the fusion center
( )
i
T x :decide if I xi( ) equals B x( ) ( )
R x :the throughput of CR users
0( )
R x :the throughput of CR users when channel is idle
( )
m
Q x :the probability of miss detection at the fusion center
( )
f
Q x :the probability of false alarm at the fusion center
( )
d
Q x :the probability of detection at the fusion center
d
Chapter 1
Introduction
In recent years, the demand of spectrum is increasing that results in cram of some spectrum bands and poor spectrum efficiency. Therefore, spectrum is a precious resource. The CR technique [1], [2] that has the ability of spectrum sensing was proposed in order to utilize as idle spectral resources as possible.
This technique divides users in a CR network into the primary (licensed) users and secondary (CR) users. CR users sense a certain spectrum segment first before transmitting data. If CR users sense no primary users using this spectrum segment, they are allowed to utilize this spectral resource only when they do not cause interference to the primary users. Otherwise, if CR users find the primary users using this spectrum segment, they must quit this spectrum segment and search another available spectrum segment. This idle spectrum segment is called spectrum hole [3], we can detect it to improve spectrum efficiency by spectrum sensing technique.
However, the sensing ability of a single CR user is limited since signals may be interfered by noise and attenuated by distance. In addition, shadowing effect in wireless network and hardware’s condition of CR users may cause poor sensing ability of CR users. Thus, we need to combine CR users together to sense spectrum that can promote the whole sensing ability of a CR network. The way is called cooperative spectrum sensing (CSS) [4].
Merely, a simple CSS using OR rule, AND rule, and Majority rule of which error rate are still not satisfactory under an unstable network. Consequently, a weighted fusion rule is proposed so that reliable CR users are given higher weights. It has a better performance than a simple CSS.
A CR user in mal-function and being hacked may cause incorrect reports. These incorrect reports are sent to the fusion center that results in wrong global decision. Therefore, we design a weighted algorithm that is more robust than other weighted algorithms against hackers.
The rest of this thesis is organized as fallows. In Chapter 2, we formulate the problem of signal detection of the primary user in a CR network. Then we investigate some weighted fusion rules in Chapter 3 and propose our weighted algorithm in Chapter 4, respectively. Next, we give some simulations about the previous weighted fusion rule and ours in Chapter 5. Finally, conclusions are given in Chapter 6.
Chapter 2
Background
2.1 Local Spectrum Sensing
The purpose of local spectrum sensing is to decide if the primary user exists and do binary hypothesis test of CR users based on received the primary user’s signal. We assume that the sensing channel is time-invariant during the sensing process. Then we can represent local spectrum sensing to the following binary hypothesis test [4]:
0 1 ( ) , ( ) ( ) ( ), i i i i n t H y t h s t n t H = + (1)
where y ti( ) is received signal at CR user i, n ti( ) is the channel noise, h is the channel gain, s t( ) is the primary user’s signal. H0 represents that the primary user is absent in the sensing channel; otherwise, H1 represents that the primary user is present in the sensing channel. We define the probability of detection Pd i, , the probability of miss
detectionPm i, , the probability of false alarm Pf i, at CR user i:
, 1 1 , 0 1 , , 1 0 Prob{ | } Prob{ | } 1 Prob{ | } d i m i d i f i P H H P H H P P H H = − ≜ ≜ ≜ (2)
We assume that CR users perform local spectrum sensing with energy detector [5]: 2 2 0 2 2 1 , (2 ), u i u i H E H χ χ γ = (3)
where Ei is received signal energy at CR user i, 2 2u
χ is central chi-square distribution,
2 2u(2 )i
χ γ is non-central chi-square distribution. For CR user i with energy detector, the
average probability of detection Pd i,, the average probability of miss detectionPm i,, and
the average probability of false alarm Pf i, over AWGN channels are given, respectively, by [5]: , 1 , , , 0 Pr { | } ( 2 , ) 1 ( , ) 2 Pr { | } ( ) d i i i u i i m i d i i f i i i P ob E H Q P P u P ob E H u λ γ λ λ λ = > = = − Γ = > = Γ (4)
where u=TW is the time-bandwidth product and γi is instantaneous signal-to-noise ratio (SNR) of received signal at CR user i . Qu is the Generalized Marcum
Q-function by 2 2 1( ) 2 1 1 ( , ) u t a I at u u u x Q a x t e dt a − ∞ − + −
=
∫
, Iu−1(.) is modified Bessel function, and ( , )a xΓ is incomplete gamma function by 1
( , ) a t x a x t e dt ∞ − − Γ =
∫
.2.2 Cooperative Spectrum Sensing
CR networks may happen shadowing effort and signal attenuation. To solve this issue, multiple CR users perform local spectrum sensing together. The way is called cooperative spectrum sensing [4]. As is shown in fig. 1, reports Ii from different CR users is combined at the fusion center to decide whether the primary user is present in the sensing channel. A global binary decision B is made by the fusion center. The procedure is as follows:
˙Step 1:Every CR user i performs local spectrum sensing, then makes a binary decision Ii∈{0,1}.
˙Step 2:All CR users report Ii to the fusion center.
˙Step 3:The fusion center combines these reports to make a global binary
decision B∈{0,1} that indicates whether the primary user is present in the sensing channel.
Fig. 1. System model of cooperative spectrum sensing in a cognitive network.
Primary User CR CR CR Fusion Center
2.3 Existing Data Fusion Techniques
As the above mentioned, CR user i performs local spectrum sensing and reports a local decision Ii to the fusion center. The fusion center makes a global decision B
based on the fusion rule. Most general fusion rule is k-out- of- n rule:
1
,
1
,
0
n i iI
k
B
Otherwise B
=
≥
=
∑
=
(5)OR rule and AND rule are special cases of k =1 and k =n, respectively. From (5), we know that every CR user owns equal weight for k-out-of- n rule. A final global decision is based on how many CR users report that the primary user is present in the sensing channel. For k-out-of- n rule, if more than or equal k CR users report that the primary user is present in the sensing channel, a global decision B is 1. The paper [4] discusses how to select an optimal k value to minimize total error probability (Qf +Qm). Usually, if the probability of false alarm Pf and the probability of miss detection Pm for CR
users are the same order, an optimal k value is 1 2
n
+
that is Majority rule. When
f m
P ≪P , the threshold λ of a CR user should be very large, it implies that k value approaches 1, thus OR rule is optimal; otherwise, when Pm ≪Pf , the threshold λ of a CR user should be very small, it implies that k value approaches n , thus AND rule is optimal. They can be verified by fig. 2.
Fig. 2. Error probability of various thresholds for k-out-of- n rule [4]
2.4 Throughput
The framework of 802.22 is shown in fig. 3, the length of a frame is T . The beginning part of a frame is the sensing time τ , then the sensing result decides that a CR user keeps silent or processes data transmitting during the following T −τ. As the sensing time is shorter, the transmitting time is longer. However, the sensing time is too small to decrease the probability of miss detection and the probability of false alarm. The paper [6] discusses how to set the sensing time τ that makes a CR network have an optimal throughput when the probability of detection Qd is more than the lowest bound of the probability of detection Qd .
Fig. 3. The framework of 802.22 [6]
Next, we want to calculate the throughput R of a CR user during a frame time. If the primary user is absent in the sensing channel and a CR user does not happen the condition of false alarm, the throughput is R0, by contrast, if the primary user is present
in the sensing channel and a CR user does not detect the primary user, the throughput is
1
R . We can formulate an optimal throughput:
0 1 max ( ) ( ) ( ) ( ) d d R R R subject to Q Q τ τ τ τ τ = + ≥ (6) where 0 0 0 1 1 1 ( ) ( )(1 ( )) ( ) ( )(1 ( )) f d R r P H Q R r P H Q τ τ τ τ = − = − (7) 0
r 、r1 of the above formulation are the throughputs when the primary user is absent and the primary user is present in the sensing channel respectively. Moreover, P H( 0)、P H( 1) are the probabilities when the primary user is absent and the primary user is present in the sensing channel respectively, and Qd is the lowest bound of the probability of detection.
Because r1≪r0 and Qm is limited under 0.1 according to 802.22 standard, we can
0 max ( ) ( ) d d R subject to Q Q τ τ τ ≥ (8)
The paper [6] proves that the throughput of a CR network can arrive optimization under an ideal sensing time. This result is as the following fig. 4:
Fig. 4. The relation of the throughput and the sensing time. [6]
From equation (7), we modify equation (8) as follows:
min ( ) ( ) f d d Q subject to Q Q τ τ τ ≥ (9)
Therefore, equation (9) is the problem formulation of an optimal throughput in a CR network.
Chapter 3
Related Work
3.1 Weighted Fusion Rule
However, because the distance and channel SNR of every CR user and the primary user are different, the sensing ability of every CR user is also different. Therefore, weighted fusion rules emerge to decrease the probability of false alarm under avoiding interference to the primary user. In this paper [7], a weighted fusion rule is defined:
1 1 0 1 , , n i i i n i i i I H I H ω ε ω ε = = ≥ <
∑
∑
(10)where ωi is a weight of CR user i , ε is the threshold of the fusion center. The paper [12] represents that ωi is the function of distance ℓ and SNR i γi, as follows:
( )i i i i af b a b ω ω γ = + = + ℓ (11)
where a 、 b are constant. f ℓ( )i is a non-increasing function. Usually, closer to the primary user and higher channel SNR γi of CR user i result that the sensing accuracy is also higher. When the accuracy of a CR user is high, we give it a high weight.
Fig. 5. Four weights are generated due to three thresholds [8]
Furthermore, the paper [8] also proposed a weighted fusion rule that differs from the above mentioned. In this paper [8], a CR user using 2 bits has four kinds of weights. As is shown in fig. 5, we can separate four regions due to three thresholds based on the value of received energy. Every region has its corresponding weight. Moreover, received energy of a CR user locates in a higher region so that the CR user owns a higher weight. The summation of product of a weight and the number of CR users locate in Region i is represented to N : c 3 0 c i i i N ωN = =
∑
(12)where N is the number of CR users locate in Region i . This paper set the threshold of i
a global decision L2. When Nc ≥L2, we decide that the primary user is present in the
sensing channel; otherwise, when Nc <L2, we decide that the primary is absent in the sensing channel. For example, we assume that there are j CR users in Region 2, i− j
0, it means N3 =0 N、 2 = j 、N1 = −i j N、 0 = −N i. If Nc = −(i j)ω1 + jω2 <L2, we can decide that the primary user is absent in the sensing channel.
3.2 SPRT and WSPRT
Although the above mentioned weighted fusion rules help CR networks promote the throughput, they are still worth improving in many aspects. For example, there may be hackers in CR networks. In the paper [9], it proposed Weighted Sequential Probability Ratio Test (WSPRT) algorithm to improve this problem. WSPRT is derived from Sequential Probability Ratio Test (SPRT).
SPRT collects more local spectrum sensing reports even if CR users have low spectrum sensing accuracy. We define the following likelihood ratio as the decision variable: 1 0 0 [ | ] [ | ] n i n i i P I H S P I H = =
∏
(13)where the number of collecting samples n is a variable. The fusion rule is based on the
following criterion: 0 0 1 1 0 1 n n n S H S H S η η η η ≤ => ≥ => < <
=>take another observation
1
η and η0 are upper threshold and lower threshold, respectively. The proposed new decision variable in WSPRT is:
1 0 0 [ | ] [ | ] i n i n i i P I H W P I H ω = =
∏
(15)where ωi is defined as a weight of CR user i that is the function of reputation value
i κ : 0 ( ) max( ) [0,1] i i i i i i i g f g g g κ ω κ κ κ κ ω ≤ − = = + > − + ∈ (16)
where f(.) is a non-decreasing function, g(>0) is a variable that let ωi be not zero for the first (g-1) reputation.
This paper [9] describes WSPRT fusion rule using the following algorithm:
( ) 1 0
0 1
1: , 0.
2 : For each spectrum sensing attempt made by fusion center{ 3 : 0, 1.
4 : Get a spectrum sensing report from CR user [ | ] 5 : ( ) [ | ] 6 : If , ( 1) mod i i n i f i n n i n i i W I i P I H W W P I H W i i N κ κ η η ∀ = = = ← < < ← + 1 1 0, 0 . Go to step4. 7: If , accept , i.e., output 1. Go to step9. 8: If accept , i.e., output 0.
9 : For each sampled , set ( 1) 10 :} i n n I I i i i W H B W H B I η η κ κ + ≥ = < = ← + −
Chapter 4
Proposed Weighted Fusion Rule
However, the above weighted fusion rules only consider a little real circumstances of CR networks. For example, both power attenuation and mal-function of CR users, and notorious hackers in CR networks result in decay of the sensing ability. Consequently, assignment of a dynamic weight is suitable for reality. In order to arrive assignment of a dynamic weight, the fusion center needs to refer historical records of CR users to make up current weight. Moreover, CR users with higher reliability are given a higher weight; otherwise, poor CR users are given a lower weight. We proposed an improved weighted fusion rule, it gives various weights based on conditions of CR users. As a result, using our proposed weighted fusion rule can promote the sensing ability and the throughput of CR networks. On the basis of the above discussion, we can formulate the design of a weighted fusion rule as the following optimal problem:
0 max { ( )} min{ ( )} ( ) f d d R x Q x subject to Q x Q => ≥ (17) where 0 1 ( ) ( ( 1) ( ) | ) N f i i i Q x P ω x I x ε H = =
∑
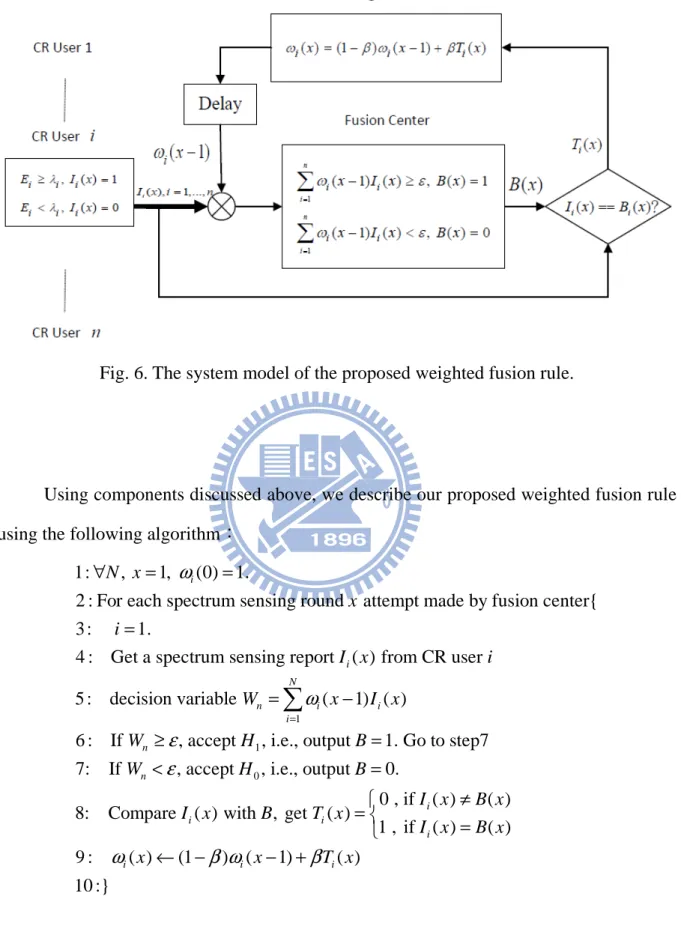
− ≥ (18)Based on the above mentioned concept, we propose an algorithm that designs a dynamic weight to promote the throughput of the whole CR network. The system model is shown in fig. 6.
Fig. 6. The system model of the proposed weighted fusion rule.
Using components discussed above, we describe our proposed weighted fusion rule using the following algorithm:
1 1: , 1, (0) 1.
2 : For each spectrum sensing round attempt made by fusion center{ 3 : 1.
4 : Get a spectrum sensing report ( ) from CR user 5 : decision variable ( 1) ( ) 6 : If i i N n i i i N x x i I x i W x I x ω ω = ∀ = = = =
∑
− 1 0, accept , i.e., output 1. Go to step7 7: If , accept , i.e., output 0.
0 , if ( ) ( ) 8: Compare ( ) with , get ( )
1 , if ( ) ( ) 9 : ( ) (1 ) ( 1) ( ) 10 :} n n i i i i i i i W H B W H B I x B x I x B T x I x B x x x T x ε ε ω β ω β ≥ = < = ≠ = = ← − − +
The update weight is
( ) (1 ) ( 1) ( )
i x i x T xi
ω = −β ω − +β (19)
in the above formulation, x is the sensing round, the initial ωi(0)=1, moreover, a weight of x−thround is composed of a weight of (x−1) -th round and T xi( ) based on proportion β , 0≤ ≤β 1, an optimal β is obtained by simulation. T xi( ) is an indicator that shows if a local spectrum sensing report of CR user i is equal to a global decision of the fusion center.
0, ( ) ( ) ( ) 1, ( ) ( ) i i i if I x B x T x if I x B x ≠ = = (20) where I x 、 ( ) {0,1}i( ) B x ∈ . We derive ωi( )x = −(1 β ω) i(x− +1) βT xi( ) by recursive: 2 3 2 1 1 ( ) (1 ) ( 1) ( ) (1 ) ( 2) (1 ) ( 1) ( ) (1 ) ( 3) (1 ) ( 2) (1 ) ( 1) ( ) ... (1 ) (0) [(1 ) ( )] ( ) i i i i i i i i i i x x x k i i i k x x T x x T x T x x T x T x T x T k T x ω β ω β β ω β β β β ω β β β β β β ω β − β − β = = − − + = − − + − − + = − − + − − + − − + = = − +
∑
− + 1 1 1 1 = (1 ) (0) [(1 ) ( )] ( ) = (1 ) [(1 ) ( )] ( ) x x x k i i i k x x x k i i k T k T x T k T x β ω β β β β β β β − − = − − = − + − + − + − +∑
∑
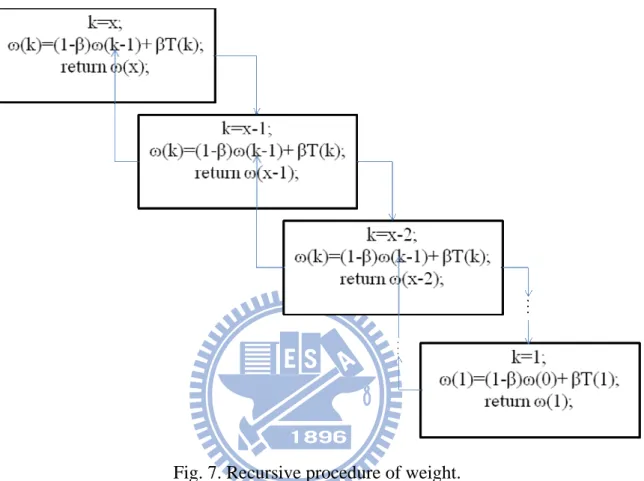
(21)The above formulation is generated by recursive procedure of a weight shown in fig. 7.
Fig. 7. Recursive procedure of weight.
Therefore, we substitute equation (21) to equation (18):
0 1 2 1 1 0 1 1 ( ) ( ( 1) ( ) | ) ( ((1 ) [(1 ) ( )] ( 1)) ( ) | ) N f i i i N x x x k i i i i k Q x P x I x H P T k T x I x H ω ε β β β β ε = − − − − = = = − ≥ = − + − + − ≥
∑
∑
∑
(22)The threshold ε of the fusion center depends on average weight 1 ( ) N i i x N ω =
∑
of CRusers due to the decision variable
1 ( 1) ( ) N n i i i W ω x I x =
threshold ε of the fusion center is about 1 ( ) 2 N i i x N N ω =
∑
. The factor 2 N is the threshold of Majority rule. However, real threshold ε of the fusion center remains to be simulated in next chapter.Chapter 5
Simulation Results
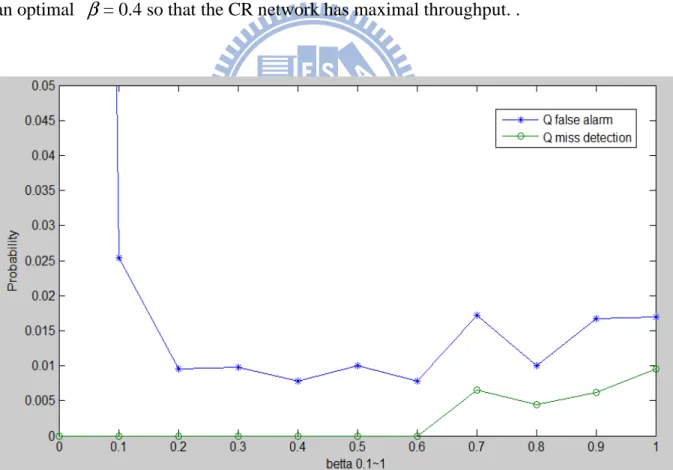
In our proposed algorithm, we must find an optimal β to decrease Q f by simulation. The circumstance of the CR network is the number of CR users N =500, the sensing rounds x =1000, and CR users are separated into two groups, one group is CR
users with 90% sensing accuracy, another group is CR users with 40% sensing accuracy. Here, both CR users with good sensing accuracy and CR users with bad sensing accuracy account for half of CR users in the CR network. In the simulation shown in fig. 8, we get an optimal β = 0.4 so that the CR network has maximal throughput. .
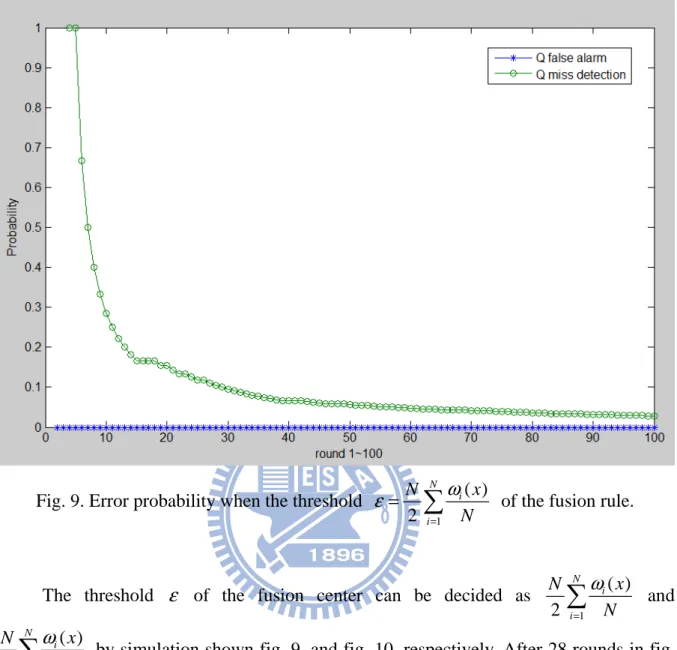
Fig. 9. Error probability when the threshold 1 ( ) 2 N i i x N N ω ε =
=
∑
of the fusion rule.The threshold ε of the fusion center can be decided as 1 ( ) 2 N i i x N N ω =
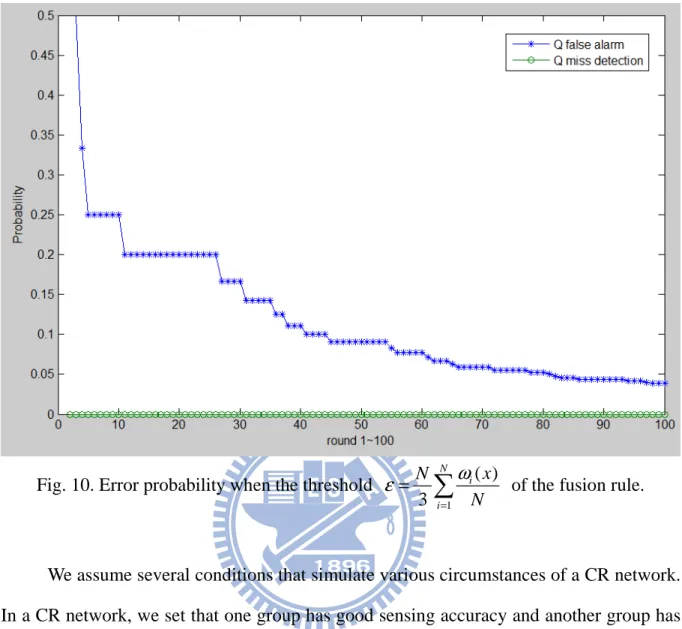
∑
and 1 ( ) 3 N i i x N N ω =∑
by simulation shown fig. 9. and fig. 10, respectively. After 28 rounds in fig. 9, we discover that the probability of miss detection just decreases to an acceptable value. Otherwise, fig. 10 shows that the probability of miss detection is almost 0 and the probability of false alarm also has remarkable decrease. In order to guarantee that CR users do not affect the primary user, we select1 ( ) 3 N i i x N N ω =
∑
as the threshold ε of the fusion center.Fig. 10. Error probability when the threshold 1 ( ) 3 N i i x N N ω ε =
=
∑
of the fusion rule.We assume several conditions that simulate various circumstances of a CR network. In a CR network, we set that one group has good sensing accuracy and another group has bad sensing accuracy. Here, CR users with good sensing accuracy account for 0~100% of CR users in a CR network, and CR users with bad sensing accuracy account for the rest of CR users in a CR network. Parameters are β = 0.4, N =500, x =100. First, CR users are
separated into group 1 with 90% sensing accuracy and group 2 with 40% sensing accuracy. Second, CR users are separated into group 1 with 90% sensing accuracy and group 2 with 10% sensing accuracy. Third, CR users are separated into group 1 with 80% sensing accuracy and group 2 with 10% sensing accuracy. We display the above mentioned three cases of network circumstances in fig. 11, fig. 12, and fig. 13, respectively.
Fig. 11. Error probability of CR users with 90% and 40% sensing accuracy.
Fig 13. Error probability of CR users with 80% and 10% sensing accuracy.
When both CR users with good sensing accuracy and CR users with bad sensing accuracy are higher such as fig. 11(90% and 40%), error probability is lower. It means that the CR network has higher throughput. In addition, CR users with bad sensing accuracy also help CR users with good sensing accuracy promote the whole throughput of a CR network together. It can be observed from fig. 11~fig. 13.
On the basis of the above discussion, we list three tables for different proportions of CR users with good sensing accuracy and CR users with bad sensing accuracy. First in table 1, CR users with good sensing accuracy account for 50% of CR users in a CR network, and CR users with bad sensing accuracy account for 50% of CR users in a CR network. Second in table 2, CR users with good sensing accuracy account for 60% of CR users in a CR network, and CR users with bad sensing accuracy account for 40% of CR
users in a CR network. Third in table 3, CR users with good sensing accuracy account for 70% of CR users in a CR network, and CR users with bad sensing accuracy account for 30% of CR users in a CR network. From three tables, when CR users with good sensing accuracy account for higher proportion of CR users in a CR network, the throughput of a CR network is higher. It can be observed that error probability of table 3 is lowest between table 1~table 3.
Table 1. Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 50% of CR users and bad-sensing-accuracy CR users accounting for 50% of CR users. Group Accuracy 0% 10% 40% 100% 0.3470 0.3574 f m Q Q = = 0.1040 0.0869 f m Q Q = = 0.0003 0 f m Q Q = = 90% 0.5365 0.5240 f m Q Q = = 0.3622 0.3454 f m Q Q = = 0.0073 0 f m Q Q = = 80% 0.6995 0.6754 f m Q Q = = 0.5595 0.5009 f m Q Q = = 0.7269 0 f m Q Q = =
Generally, if the proportion of CR users with bad sensing accuracy is less than 40% (table 2) in a CR network and accuracies of two groups are only not terrible, our proposed weighted fusion rule will have an excellent performance about the probability of miss detection and the probability of false alarm.
Table 2. Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 60% of CR users and bad-sensing-accuracy CR users accounting for 40% of CR users. Group Accuracy 0% 10% 40% 100% 0.1094 0.1186 f m Q Q = = 0.0683 0.0527 f m Q Q = = 0 0 f m Q Q = = 90% 0.1402 0.1285 f m Q Q = = 0.0756 0.0562 f m Q Q = = 0.0007 0 f m Q Q = = 80% 0.4326 0.4282 f m Q Q = = 0.1732 0.1434 f m Q Q = = 0.0992 0 f m Q Q = =
Table 3. Error probability of different group accuracies under good-sensing-accuracy CR users accounting for 70% of CR users and bad-sensing-accuracy CR users accounting for 30% of CR users. Group Accuracy 0% 10% 40% 100% 0 0 f m Q Q = = 0 0 f m Q Q = = 0 0 f m Q Q = = 90% 0.0492 0.0406 f m Q Q = = 0.0060 0 f m Q Q = = 0 0 f m Q Q = = 80% 0.0829 0.0686 f m Q Q = = 0.0163 0.0012 f m Q Q = = 0.0043 0 f m Q Q = =
Next, we compare our weighted fusion rule with WSPRT. The circumstance of the simulation exists 0~100% of hackers in a CR network. Parameters are β = 0.4, N =500,
x =100. We assume that hackers have 0% sensing accuracy and the rest CR users have
100% sensing accuracy. In fig. 14, when the proportion of hackers is less than 40%, the performance of our proposed weighted fusion rule is superior to WSPRT. Otherwise, when the proportion of hackers is more than 50%, the performance of our proposed weighted fusion rule is inferior to WSPRT. However, regardless of any great fusion rules, data are not worthy to be referred under more than 50% CR users with bad sensing accuracy because both Q f and Q must be too high to be acceptable. m
Fig. 14. The performance of WSPRT and our proposed weighted fusion rule under different proportion of hackers.
Chapter 6
Conclusion
In this thesis, we propose a simple model and an algorithm for spectrum sensing in CR networks. Our main concern here is to design an algorithm for weights of CR users based on historical records. We have shown that not only miss detection is in our control, but also false alarm has a significant improvement. Specifically, our proposed model still keep robust for CR networks with hackers.
However, our proposed model only takes the fusion center terminal into consider. How to combine cluster skills of CR users to promote more throughput remains to be further studied.
References
[1] Ghasemi, E. S. Sousa, “Spectrum sensing in cognitive radio networks: requirements, challenges and design trade-offs,” IEEE Communications Magazine, vol. 46, no. 4, pp. 32-39, Apr. 2008
[2] J. Mitola, G. Q. Maguire, “Cognitive radio: making software radios more personal,” IEEE Personal Communication, vol.6, pp.13-18, Aug. 1999.
[3] F. Akyildiz, W. Y. Lee, M. C. Vuran, S. Mohanty, “Next generation/dynamic spectrum access/cognitive radio wireless networks: A survey,” Computer Networks, vol. 50, no. 13, pp. 2127-2159, Sep. 2006.
[4] W. Zhang, R. K. Mallik, K. B. Letaief, ”Cooperative spectrum sensing optimization in cognitive radio networks,” in Proc. IEEE ICC’08, pp. 3411 – 3415, May 2008.
[5] F. F. Digham, M. S. Alouini, M. K. Simon, “On the energy detection of unknown signals over fading channels,” in Proc. IEEE ICC’03, pp. 3575 – 3579, vol. 5, May 2003.
[6] Y. C. Liang, Y. Zeng, C.Y. Peh, A. T. Hoang, “Sensing-throughput tradeoff for cognitive radio networks,” in IEEE Trans. on Wireless Communications, vol. 7, no.4, Apr. 2008.
[7] L. Zhengyi, L. Lin, and Z. Chi, “Fast detection method in cooperative cognitive radio networks,” International Journal of Digital Multimedia, 2010.
[8] J. Ma, G. Zhao, Y. Li, “Soft combination and detection for cooperative spectrum sensing in cognitive radio networks,” in IEEE Trans. on Wireless Communications, vol. 7, no.11, November 2008.
[9]R. Chen, J. M. Park, and K. Bian, “Robust Distributed Spectrum Sensing in Cognitive Radio Networks,” IEEE INFOCOM, 2008.

![Fig. 2. Error probability of various thresholds for k -out-of- n rule [4]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381180.178195/16.892.233.705.124.494/fig-error-probability-various-thresholds-k-n-rule.webp)
![Fig. 3. The framework of 802.22 [6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381180.178195/17.892.307.645.120.278/fig-the-framework-of.webp)
![Fig. 4. The relation of the throughput and the sensing time. [6]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381180.178195/18.892.236.676.379.732/fig-relation-throughput-sensing-time.webp)
![Fig. 5. Four weights are generated due to three thresholds [8]](https://thumb-ap.123doks.com/thumbv2/9libinfo/8381180.178195/20.892.261.667.115.416/fig-weights-generated-thresholds.webp)