國
立
交
通
大
學
多媒體工程研究所
碩
士
論
文
應用影像融合技術於彩色影像之對比強化演算法
Color Image Contrast Enhancement Using Image Fusion Technique
研 究 生:王維綱
指導教授:陳玲慧 教授
指導教授:李建興 教授
應用影像融合技術於彩色影像之對比強化演算法
Color Image Contrast Enhancement Using Image Fusion Technique
研 究 生:王維綱 Student:Wei-Kang Wang
指導教授:陳玲慧 Advisor:Ling-Hwei Chen
指導教授:李建興 Advisor:Chang-Hsing Lee
國 立 交 通 大 學
多媒體工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Multimedia Engineering College of Computer Science
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Computer Science
July 2012
Hsinchu, Taiwan, Republic of China
i
應用影像融合技術於彩色影像之
對比強化演算法
研究生:王維綱 指導教授:陳玲慧 博士
李建興 博士
國立交通大學多媒體工程研究所碩士班
摘 要
由於攝影器材(例如數位相機和手機)的發展與普及,越來越多的數位影像 出現在人們的日常生活中。同時,隨著網際網路與社群網路逐漸發展成熟,人們 可以很輕易的與朋友分享彼此的影像。但是並不是所有的影像都是讓人滿意的。 攝影器材的技術限制以及不適當的攝影環境會使得有些影像曝光不夠而有些影 像則是過度曝光。為了能夠解決這個問題,許多傳統的影像強化技術被提出來。 但是這些傳統技術經常只適用於一些特定的影像抑或這些方法是非自動化的。因 此,本論文提供了一個基於影像融合技術的對比強化演算法。首先,數張亮度不 同的影像會被產生出來。接著,輸入影像的像素會依據像素的亮度來做分群。最 後,我們提出的 Classified Image Fusion (CIF)方法會將這些虛擬影像作結合 來得到一張曝光良好的結合後的影像。ii
Color Image Contrast Enhancement Using
Image Fusion Technique
Student:Wei-Kang Wang Advisor:Dr. Ling-Hwei Chen
Dr. Chang-Hsing Lee
Institute of Multimedia Engineering
College of Computer Science
National Chiao Tung University
ABSTRACT
There are more and more digital images in our daily life thanks to the popularity
of photograph capturing equipments, such as digital cameras and mobile phones. In
addition, as the Internet and social networks have been well developed, it’s easier for
people to share images with their friends. However, not all people are satisfied with
the photos they taken due to the limitations of the image capturing devices. The
improper luminance condition may cause under-exposed and over-exposed images.
To solve this problem, plenty of researches are proposed for contrast enhancement.
iii
low contrast images or cannot be automatically applied on all images. Hence, in this
thesis, we propose a classified image fusion (CIF) method for image contrast
enhancement. First several virtual images having different intensities are generated.
Second, the input image pixels are classified to several classes according to their
luminance values. Finally, CIF was proposed to combine these exposure images to
iv
誌 謝
這篇論文的完成,首先感謝指導教授陳玲惠博士和李建興博士。謝謝兩位教 授兩年間不辭辛勞的給予課業上及生活上的指導與關心。讓我在攻讀交通大學碩 士的這兩年間,除了學習到如何做研究外,也學會了很多待人處事的道理。此外, 也感謝口試委員李坤龍教授、石昭玲教授和李遠坤教授於口試中給予的建議與指 導,使我能夠發現自己研究的盲點與潛力,也使的整篇論文更佳的完善。 在碩士的兩年間,最常出現也待最久的地方就是實驗室了。非常感謝實驗室 文超、惠龍、俊旻、占和、芳如、盈如和懷三學長們對我的指導與建議。謝謝他 們教導了我不只是課業上的知識也教了我很多生活上的態度。感謝昱嘉、志錡、 明昌三位學弟,有了他們讓實驗是充滿了朝氣與歡笑。感謝厚邑和子杰兩個我從 大學時代起的好朋友,我們一起努力完成了碩士的學業、通過了最後口試的考驗。 謝謝你們照兩年的陪伴與對我的照顧,萬分感謝。 此外,這裡還想要謝謝我的朋友們,感謝他們對我的鼓勵與關心。感謝我的 國中死黨們,即使沒有直接的話語,但是我知道你們一直都是支持我、關心我的。 最後我想要感謝我的家人,感謝我的爸爸、媽媽、哥哥和弟弟,謝謝爸媽一 直對我的鼓勵與支持,謝謝哥哥給我碩士生過來人的一些經驗,謝謝弟弟陪我一 起宣洩我的壓力,有你們、有這個溫暖的家,讓我迷茫、疲憊、挫折時,能夠堅 強的再站起來並鼓起勇氣去面對每一個挑戰。謹以此篇論文獻給你們,也獻給所 有我關心以及關心我的人。v
CONTENTS
ABSTRACT (IN CHINESE)……….I
ABSTRACT………..II
ACKNOWLEDGE (IN CHINESE)……….IV
CONTENTS………..V
LIST OF FIGURES………VII
CHAPTER 1 INTRODUCTION ……….1
1.1 Motivation ………...……….…………1
1.2 Related Work ………2
1.3 Organization of the Thesis ………...7
CHAPTER 2 PROPOSED CLASIFIED IMAGE FUSION METHOD FOR IMAGE CONTRAST ENHANCEMENT ………..8
2.1 Generation of Virtual Exposure images ………..10
2.2 Image Pixel Classification ………...14
2.3 Selection of Relevant Virtual Exposure Images ……….17
2.4 Classified Image Fusion ………..20
2.4.1 Just-Noticeable-Difference (JND) Model of the Human Visual System (HVS) ……….21
vi
2.4.3 Well-exposedness Measure ……….26
2.4.4 Classified Image Fusion in the DWT Domain ………....39
2.5 Color Components Reconstruction ………41
CHAPTER 3 EXPERIMENTAL RESULTS………42
3.1 Experimental Results on a Normal Image ………...43
3.2 Experimental Results on a Backlight Image ………...43
3.3 Experimental Results on Low Contrast Images ………...44
3.4 Experimental Results on a Dark Scene Image ………46
CHAPTER 4 CONCLUSIONS ………54
vii
LIST OF FIGURES
Fig. 1 Flow chart of the proposed CIF system ………..……10 Fig. 2 Generated virtual exposure images (a) k = -7 (b) k = -6 (c) k = -5 (d) k = -4 (e)
k = -3 (f) k = -2 (g) k = -1 (h) k = 0 (original image) (i) k = 1 (j) k = 2 (k) k =
3 (l) k = 4 (m) k = 5 (n) k = 6 (o) k = 7………...12
Fig. 3 Generated virtual exposure images (a) k = -7 (b) k = -6 (c) k = -5 (d) k = -4
(e) k = -3 (f) k = -2 (g) k = -1 (h) k = 0 (original image) (i) k = 1 (j) k = 2 (k) k = 3 (l) k = 4 (m) k = 5 (n) k = 6 (o) k = 7 ………...…13
Fig. 4 Input images and classification results. (a) Original gray image (b)
Classification result with m = 3 (c) Original gray image (d) Classification result with m = 4 (e) Original gray image (f) Classification result with……16
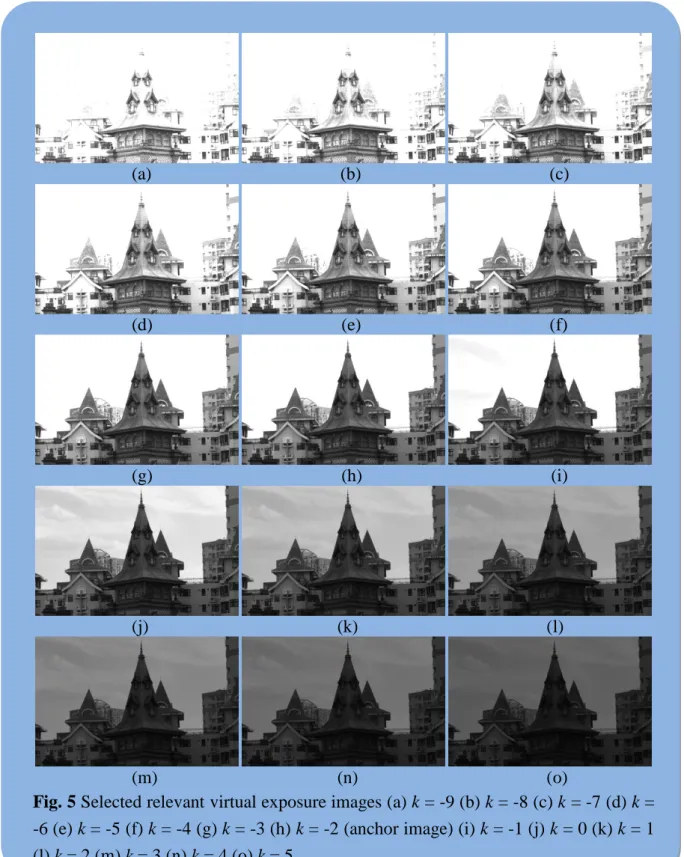
Fig. 5 Selected relevant virtual exposure images (a) k = -9 (b) k = -8 (c) k = -7 (d) k
= -6 (e) k = -5 (f) k = -4 (g) k = -3 (h) k = -2 (anchor image) (i) k = -1 (j) k = 0 (k) k = 1 (l) k = 2 (m) k = 3 (n) k = 4 (o) k = 5 ………...18
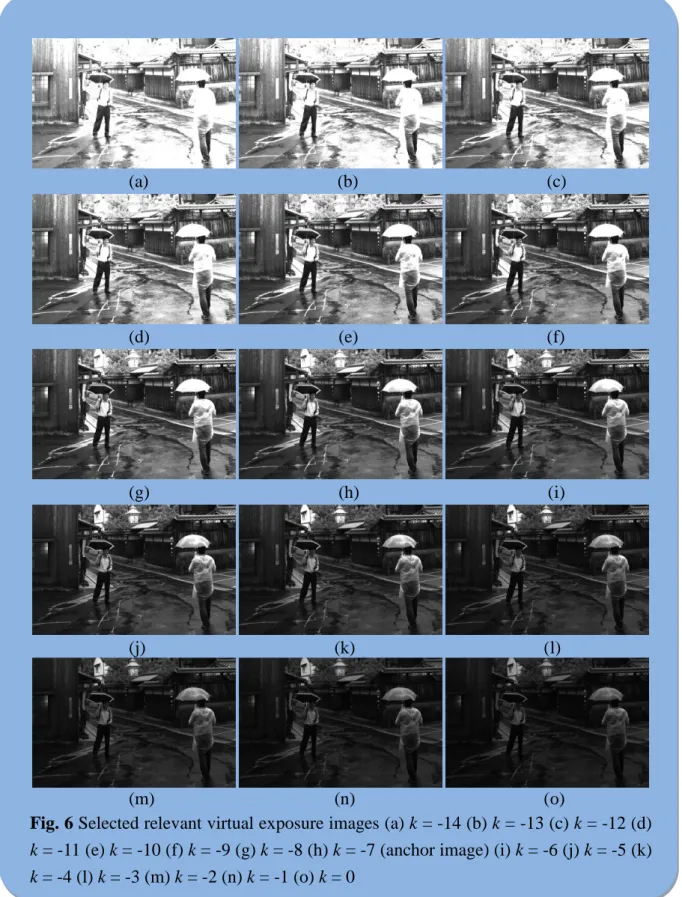
Fig. 6 Selected relevant virtual exposure images (a) k = -14 (b) k = -13 (c) k = -12
(d) k = -11 (e) k = -10 (f) k = -9 (g) k = -8 (h) k = -7 (anchor image) (i) k = -6 (j) k = -5 (k) k = -4 (l) k = -3 (m) k = -2 (n) k = -1 (o) k = 0………….……..19
Fig. 7 Flow chart of the proposed classified image fusion method ……….20 Fig. 8 The mask B used in computing bg(x, y) ………..………..22 Fig. 9 The gradient mask used in computing gradk(x, y) …………...22
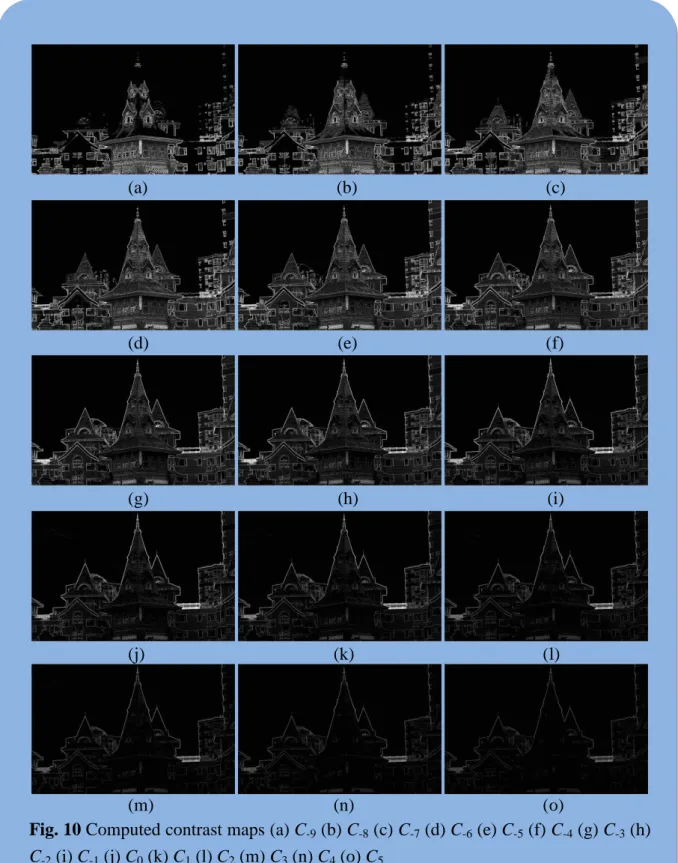
Fig. 10 Computed contrast maps (a) C-9 (b) C-8 (c) C-7 (d) C-6 (e) C-5 (f) C-4 (g) C-3 (h)
C-2 (i) C-1 (j) C0 (k) C1 (l) C2 (m) C3 (n) C4 (o) C5………...…..24
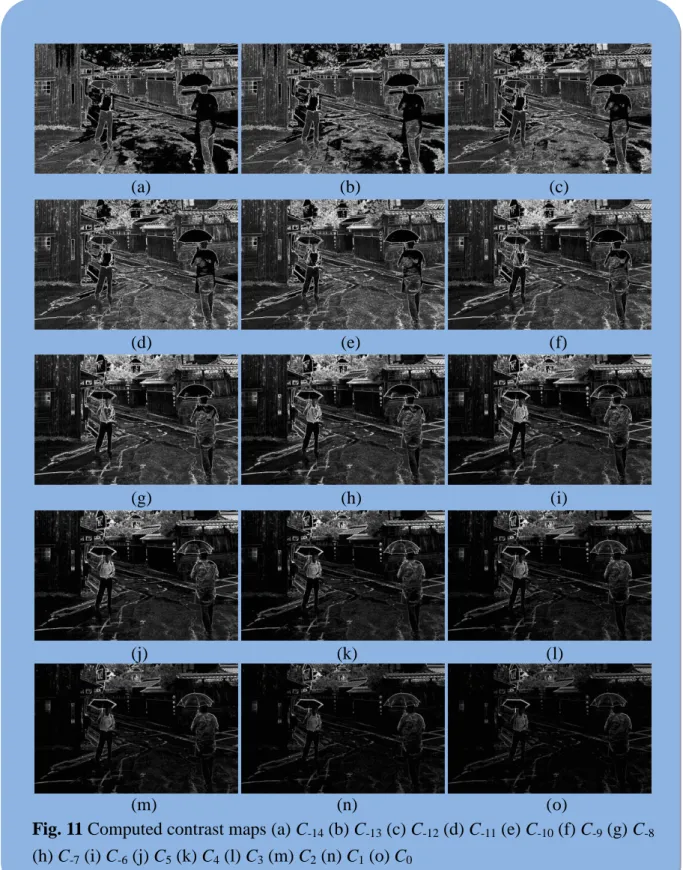
Fig. 11 Computed contrast maps (a) C-14 (b) C-13 (c) C-12 (d) C-11 (e) C-10 (f) C-9 (g)
C-8 (h) C-7 (i) C-6 (j) C5 (k) C4 (l) C3 (m) C2 (n) C1 (o) C0 ………25
Fig. 12 The equally-distributed target luminance values t i
Y with m = 3 ..………..27
Fig. 13 The target luminance values P i
Y with m = 3 ………..…28
Fig. 14 The luminance range to determine σi with m = 3 .……….30
Fig. 15 Exposedness maps generated by using the exposedness measure proposed by
Mertens et al. [22] (a) E-9 (b) E-8 (c) E-7 (d) E-6 (e) E-5 (f) E-4 (g) E-3 (h) E-2 (i)
E-1 (j) E0 (k) E1 (l) E2 (m) E3 (n) E4 (o) E5 ………....32
Fig. 16 Classified well-exposedness maps (a) E-9 (b) E-8 (c) E-7 (d) E-6 (e) E-5 (f) E-4
(g) E-3 (h) E-2 (i) E-1 (j) E0 (k) E1 (l) E2 (m) E3 (n) E4 (o) E5 ….……...33
Fig. 17 Exposedness maps generated by using the exposedness measure proposed by
Mertens et al. [22] (a) E-14 (b) E-13 (c) E-12 (d) E-11 (e) E-10 (f) E-9 (g) E-8 (h)
viii
Fig. 18 Classified well-exposedness maps (a) E-14 (b) E-13 (c) E-12 (d) E-11 (e) E-10 (f)
E-9 (g) E-8 (h) E-7 (i) E-6 (j) E-5 (k) E-4 (l) E-3 (m) E-2 (n) E-1 (o) E0 …….35
Fig. 19 Weight maps, Wk, of each exposure image Yk generated by using the
proposed classified exposedness measure. (a) W-9 (b) W-8 (c) W-7 (d) W-6 (e)
W-5 (f) W-4 (g) W-3 (h) W-2 (i) W-1 (j) W0 (k) W1 (l) W2 (m) W3 (n) W4 (o)
W5 ………37
Fig. 20 Weight maps, Wk, of each exposure image Yk generated by using the
proposed classified exposedness measure. (a) W-14 (b) W-13 (c) W-12 (d) W-11
(e) W-10 (f) W-9 (g) W-8 (h) W-7 (i) W-6 (j) W-5 (k) W-4 (l) W-3 (m) W-2 (n) W-1
(o) W0 ………38
Fig. 21 Enhanced results of a normal image using different methods ……….…...47 Fig. 22 Enhanced results of a backlight image using different methods ……..…….48 Fig. 23 Enhanced results of a low contrast image using different methods …..……49 Fig. 24 Enhanced results of another low contrast image using different methods …50 Fig. 25 Enhanced results of a dark scene image using different methods ………….51 Fig. 26 Enhanced results of a dark scene image using different methods ………….52 Fig. 27 Enhanced results of a dark scene image using different methods ………….53
1
CHAPTER 1
INTRODUCTION
1.1 Motivation
There are more and more digital images in our daily life thanks to the popularity
of photograph capturing equipments, such as digital cameras and mobile phones. In
addition, as the Internet and social networks have been widely developed, it’s easier
for people to share images with their friends. However, not all people are satisfied
with the photos they taken due to the limitations of image capturing devices. Typically,
the dynamic ranges of digital cameras or mobile phones are much smaller than that
human eyes can perceive. This phenomenon becomes more apparent in high dynamic
regions such as skies or shadows. The common shortages found in real-life images
include:
(1) A normal image with suitable exposure but some under-exposed and/or
some over-exposed regions;
(2) An over-exposed image;
2
1.2 Related Work
In order to obtain an image with proper exposedness and contrast, an image
contrast enhancement technique is needed. There are plenty of researches proposed
for image contrast enhancement. These methods can be classified into four major
categories:
(1) Histogram-based methods [1-7];
(2) Transform-based methods [1], [8], [9];
(3) Exposure-based methods [10], [11];
(4) Image fusion based methods [12-14].
The most common and well-known histogram-based method is histogram
equalization (HE) [1]. HE adjusts the input image histogram by using a non-linear
mapping function to yield a histogram which approximates uniform distribution. It
will spread the gray levels with high occurring probabilities and compress the gray
levels with low occurring probabilities to obtain an image having better contrast.
However, HE was proved to produce some unwanted artifacts, including
(1) False contour;
(2) Amplified noise;
(3) Washed-out appearance.
3
[2] proposed a local HE method. First, the input image is divided into several
non-overlapping blocks. Then, HE is applied on each block. The HE enhanced blocks
are finally fused by using bilinear interpolation to reduce the blocking effect. Kim [3]
proposed a subimage independent HE method named brightness preserving
bi-histogram equalization (BBHE). In BBHE, the input gray image is first
decomposed into two subimages based on its mean luminance, μ. Then, HE is applied
to the histograms corresponding to these two subimages independently. The subimage
with luminance lower than the mean value is mapped into the range [lmin, μ], where
lmin denotes the minimum gray level. The subimage with luminance larger than the
mean value is mapped into the range [μ, lmax], where lmax denotes the maximum gray
level. Then, the composition of these two equalized subimages is the output image.
Wang et al. [4] proposed another bi-histogram HE method in which the input image is
decomposed into two subimages by using the threshold value which yields maximum
entropy of the processed image. Then, HE is applied to two subimages independently
and the composition of HE enhanced subimages will form the output image. Chen et
al. [5] extended the former two methods and proposed minimum mean brightness
error bi-histogram equalization (MMBEBHE). In MMBEBHE, the threshold with
minimum absolute mean brightness error (AMBE) is found to divide the input image
4
composition of the HE result is the output image. Wang et al. [6] used histogram
specification to yield the target histogram which maximizes the entropy under the
constraint that the mean brightness is fixed. Chen et al. [7] proposed a method based
on BBHE. They recursively divide each subimage into two new subimages and finally
perform HE on each portions independently.
Transform-based methods [1], [8], [9] were widely used in electrical devices and
computer software. These methods use a function to map original image luminance
values to another ones. To get a pleasing image, some user-specified parameters are
needed. That is, these methods require some user interactions and thus are not fully
automatic. Transform-based methods can well handle either under-exposed images or
over-exposed images if appropriate parameters are selected. However, they cannot
produce pleasing images when the input images have both under-exposed regions and
over-exposed regions. Moroney [8] proposed a local color correction operation which
uses non-linear masking and a pixel-by-pixel gamma correction to enhance the image
quality. Schettini et al. [9] presented a local and image-dependent exponential
correction method which uses bilateral filter instead of Gaussian filter to avoid halo
effects. However, the global contrast is reduced as well.
Exposure-based methods [10], [11] adjust the exposedness of images by using a
5
proposed a method which first identifies the information carrying regions and then
adjusts the exposure levels using a “camera response”-like function. In their algorithm,
contrast and focus are used as the measures to identify the information carrying
regions. In addition, skin pixel identification method is applied to find the skin
regions. Then, the mean gray values of those pixels in informative regions are used as
reference values to adjust the exposure levels. Since the technique is designed
specifically to regions of interest, it can produce proper results in those interested
regions. However, other regions may yield poorer illumination. Safonov et al. [11]
provided an exposure correction approach based on contrast stretching and
alpha-blending which considers both brightness and the estimated reflectance of the
input image. The main problem of this method is that it may exhibit unsatisfied
illumination in some regions.
Image fusion based methods [12-14], [22], [26] tried to extract and merge
relevant information from several images taken in the same scene in order to form a
fused image which contains more information and has better visual quality/contrast
than each input image. Hsieh et al. [12] used a linear function to fuse the input image
and a HE enhanced image to produce a fused image. Pei et al. [13] performed HE and
sharpening to the input image and fused together these two enhanced images in the
6
well-exposedness as image quality measures to evaluate the contribution of each pixel
to the fused image. First, for each input image, a corresponding weight map is
computed. Then, the Laplacian pyramid of the input image and Gaussian pyramid of
the weight map are built respectively. The Laplacian pyramids of the input images are
blended with the corresponding Gaussian pyramid as the weights. Finally, the output
image is produced from the blended Laplacian pyramid. Malik et al. [26] proposed an
image fusion method performed in the wavelet transform domain. The output image is
produced by taken the inverse wavelet transform.
The aforementioned contrast enhancement methods [1-14], [22], [26] often
cannot produce pleasing images for a broad variety of low contrast images or cannot
be automatically applied on all images. That is, some user-specified parameters are
needed to obtain satisfied pictures. Therefore, we tried to design an image contrast
enhancement algorithm which can automatically enhance the contrast without taking
any user-specified parameters for any low contrast images.
In this thesis, we will propose a classified image fusion method for image
contrast enhancement. First, several virtual images having different intensities are
generated. In addition, the input image pixels are classified to several classes
according to their luminance values. Finally, a classified image fusion method,
7
virtual images and produce a fused image which is well-exposed in every region.
1.3 Organization of the Thesis
The thesis is organized as follows. In Chapter 1, motivation and some related
work are given. In Chapter 2, the proposed classified image fusion method, which can
combine the generated virtual images in an attempt to obtain an image which is
well-exposed in every region. In Chapter 3, experimental results will be given to show
the effectiveness of the proposed method. Finally, a brief conclusion and future work
8
CHAPTER 2
PROPOSED CLASIFIED IMAGE FUSION METHOD
FOR IMAGE CONTRAST ENHANCEMENT
In this chapter, we will describe the proposed classified image fusion (CIF)
method for image contrast enhancement. Image fusion is the process that aims to
extract relevant information from multiple images taken in the same scene and obtain
a more informative picture with better contrast and image quality. Image fusion has
numerous applications such as remote sensing [15-17], medical imaging [17], high
dynamic range imaging (HDRI) [17], [18], multi-focus imaging [17], [19], etc. In
remote sensing and medical imaging, several images captured from various sensors
are given. Then, these images are fused to produce a high quality image. In HDRI,
multiple images taken in the same scene with different exposure time are generated.
The image pixels having distinct luminance values are then fused to yield an image
having wide dynamic range than each individual one. In multi-focus imaging, several
images with each having some objects in focus will be merged to obtain an image in
which all relevant objects are in focus. For these applications, several images with
varying luminance, exposure, or focus, should be obtained in advance. However, it is
9
the same scene with variant information. Therefore, an algorithm will be proposed to
produce several virtual images for image fusion.
Since our proposed CIF method works on gray images, a color value to gray
value conversion is first applied on each input color image. The luminance image Y(x,
y) is converted from its original red, blue, green components using the following
function: ). , ( 114 . 0 ) , ( 587 . 0 ) , ( 299 . 0 ) , (x y R x y G x y B x y Y (1)
where R(x, y), G(x, y), and B(x, y) denote red, green and blue color values of the pixel
located at (x, y). Then, several virtual images having different intensities are generated.
In addition, a multilevel thresholding algorithm is employed to classify the input
image pixels to different classes depending on their luminance values. By using the
classification result, several relevant virtual images are selected among the generated
virtual images. After the relevant virtual images are selected, the proposed classified
image fusion algorithm, performed in discrete wavelet transform (DWT) domain, will
be designed to obtain a fused image with proper exposure in every region. The flow
10
2.1 Generation of Virtual Exposure Images
In image fusion, several images are combined to produce an output image having
better quality. For image enhancement, only one input image is given to produce an
output image with higher contrast. Therefore, it is necessary to design an algorithm to
generate several virtual images such that image fusion technique can be applied for
image contrast enhancement. In the proposed CIF method, the concept of exposure,
which refers to how much light will reach the image sensors on image capturing
devices, will be exploited to generate several virtual images having distinct luminance.
For digital cameras, shutter speed and F-stop are used to determine the exposure when
taking photos. Shutter speed controls how long the shutter is open, which corresponds
to the length of time the light can reach the image sensors. The larger the shutter
speed, the more the amount of light reaching the image sensors. Another factor
controlling the exposure of a photo is F-stop, which controls the size of the aperture.
The aperture is the hole the light of the scene passing through in the digital cameras.
11
Modern cameras use a standard F-stop scale: f/1, f/1.4, f/2, f/2.8, f/4, f/5.6, f/8, f/11,
f/16, f/22, etc. The scale is an approximately geometric sequence that corresponds to
the sequence of the powers of the square of 2. In this sequence, each stop represents a
halving of the light intensity from the previous stop. For example, f/1 allows twice as
much light to fall on the image sensor than f/1.4, and four times as much light than f/2.
In this study, we exploit the F-stop concept to generate virtual images such that their
pixel luminance values approximate a geometric sequence. In this thesis, the
luminance of the k-th virtual exposure image, denoted by Yk, is defined by the
following equation: otherwise , 255 255 2 ) ( if , 2 ) , ( ) , ( 4 4 k k x,y Y y x Y y x Yk (2)
where Y(x, y) is the gray level of input image pixel located at (x, y).
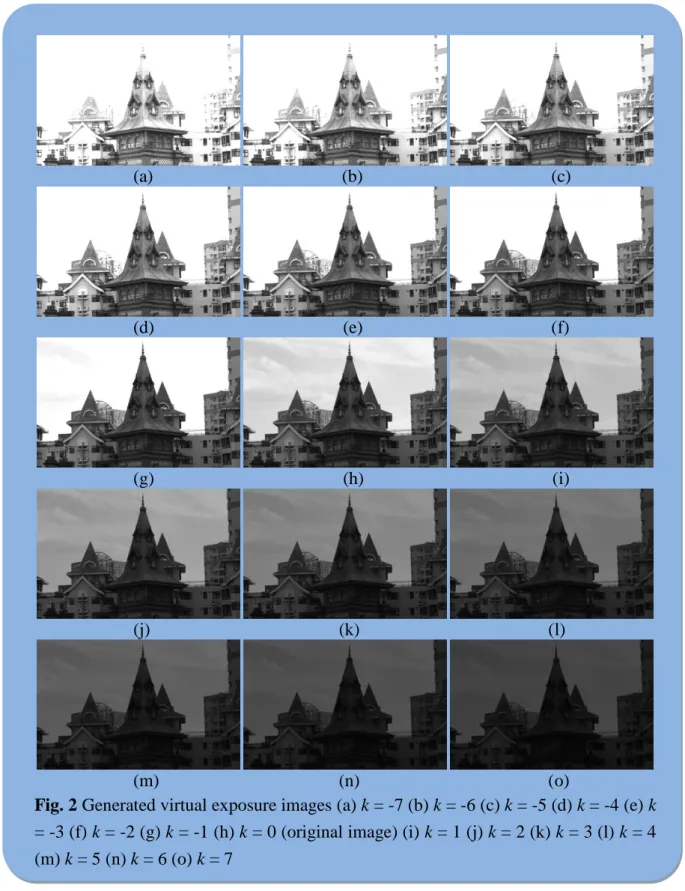
From Eq. (2), N brighter images (with k N,-N1,...,1) and N darker images (with k 1,2,...,N) compared to the input image Y are generated. Fig. 2 and Fig. 3 show some generated virtual exposure images. From Fig. 2, we can see that in
those brighter virtual images, the detail of the central building becomes more apparent
and the contrast is much sharper than that in the original image (with k = 0). However,
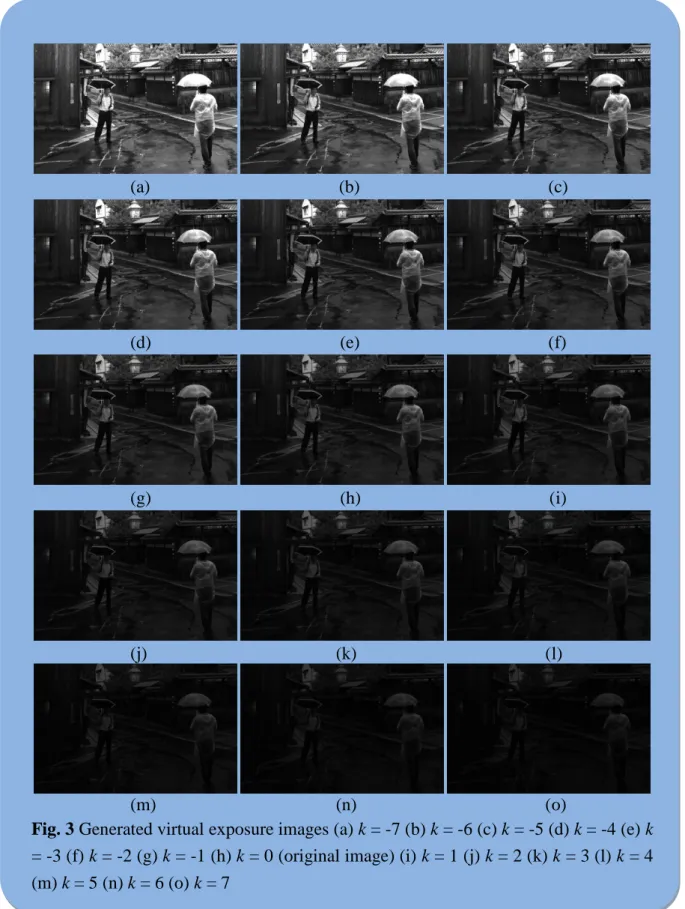
the contrast in the sky region becomes less sharp in these brighter images. Fig. 3
shows a similar result. That is, the detail of the dark foreground objects becomes
12 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 2 Generated virtual exposure images (a) k = -7 (b) k = -6 (c) k = -5 (d) k = -4 (e) k
= -3 (f) k = -2 (g) k = -1 (h) k = 0 (original image) (i) k = 1 (j) k = 2 (k) k = 3 (l) k = 4 (m) k = 5 (n) k = 6 (o) k = 7
13 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 3 Generated virtual exposure images (a) k = -7 (b) k = -6 (c) k = -5 (d) k = -4 (e) k
= -3 (f) k = -2 (g) k = -1 (h) k = 0 (original image) (i) k = 1 (j) k = 2 (k) k = 3 (l) k = 4 (m) k = 5 (n) k = 6 (o) k = 7
14
2.2 Image Pixel Classification
In the proposed CIF method, the input image pixels are classified to m classes.
Pixels in different classes will be blended with different image fusion rules. A
multilevel thresholding algorithm designed by Liao et al. [20] is utilized to find m-1
thresholds, denoted by Thd1, Thd2, …, Thdm-1 (Thd1 < Thd2 < … < Thdm-1), to divide
the input image pixels into m classes. Let Ω1, Ω2, …, Ωm denote these m classes,
according to the m-1 thresholds, these classes can be defined as follows:
( , )| ( , ) 1
. 1 x y Y x y Thd (3)
(x,y)|Thdi1 Y(x,y) Thdi
for i 2,...,m-1. i (4)
( , )| ( , ) 1
. m x y Y x y Thdm (5)In order to determine the proper cluster number m, a metric called Dunn index (DI)
[20] will be used to evaluate the classification results. DI was defined to get a
clustering result having small within-class variance and a large between-class
variance. The definition of DI for n classes is given by:
k j i c c DI k n k j i i j n j i n , , , max ) , ( min 1 , , 1 (6)
where (ci,cj) denotes the distance between two cluster centers of Ωi and Ωj
(between-class variance) and Δk is defined as follows:
). , ( max ,q kd p q p k (7)
15
variance). The higher DI indicates the better clustering result. Based on Eq. (6), the
cluster number m is determined by:
. max arg max min n m n m DI m (8)
where mmin and mmax are the maximum and minimum cluster number to be examined.
To save computation time, we bound the cluster number in the range from 3 to 6. That
is, set mmin = 3 and mmax = 6. This setting is based on the observation that typically an
image has at least three classes: dark pixels, bright pixels, and pixels with luminance
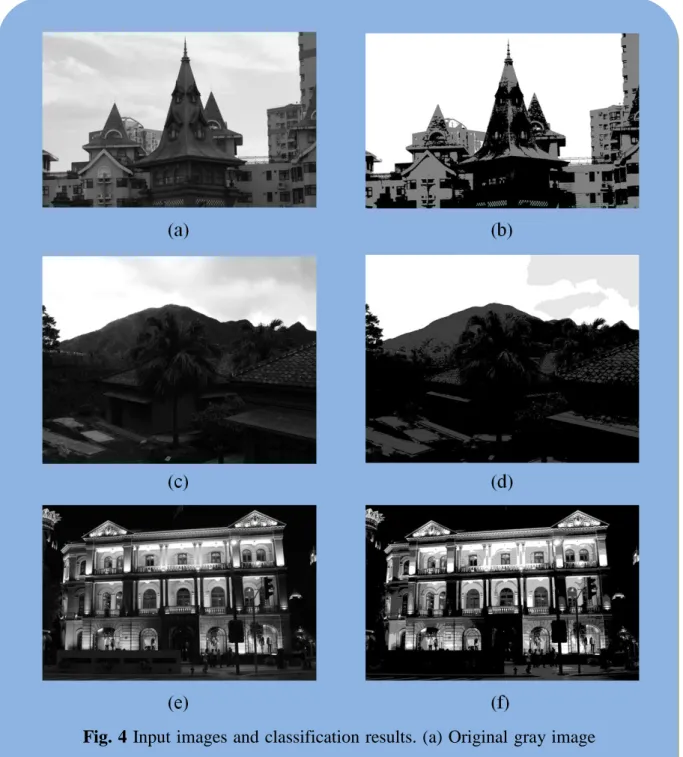
values in-between. Fig. 4 shows three input images and the corresponding image pixel
classification results. The input image shown in Fig. 4(a) is classified to three classes
as shown in Fig. 4(b): the sky region (the bright pixels), the background buildings
(well-exposed pixels), and the front-central building (dark pixels). Fig. 4(c) shows an
input image which is classified to four classes as shown in Fig. 4(d): the left side of
the sky region, the right side of the sky region, the background mountain, and the dark
houses. In Fig. 4(c), since the right side of the sky is visibly darker than the left side
of the sky, they are separated to two classes. Similarly, the right side of the sky is
noticeable brighter than the background mountain and the roof of the houses, they are
also separated. Finally, the dark trees, parts of the houses and the wall are classified to
the dark pixels. Fig. 4(f) shows the classification result of Fig. 4(e) which is classified
16
Fig. 4 Input images and classification results. (a) Original gray image
(b) Classification result with m = 3 (c) Original gray image (d) Classification result with m = 4 (e) Original gray image (f) Classification result with m = 5
17
2.3 Selection of Relevant Virtual Exposure Images
The previously generated 2N+1 images are not all used in the image fusion
process. Among these 2N+1 virtual exposure images, only those images having some
relevant informative regions will be chosen for image fusion. That is, those images
which are completely under-exposed or completely over-exposed will not be used in
the image fusion process in an attempt to yield a high informative fused image. To
this end, an anchor image among these 2N+1 virtual exposure images will be selected
first. For virtual image Yk, the trimmed mean luminance, denoted byk,of the image
pixels belonging to clusters Ω2, Ω3, …, Ωm-1 is calculated:
. Ω ) , ( 1 2 Ω ,..., Ω ) , ( 2 1
m i i y x k k m y x Y (9)That is, the pixels in the darkest class C1 and the brightest class Cm are not considered.
The image having a trimmed mean luminancekclosest to gray level 128 (the middle
value in the luminance range [0, 255]) will be selected as the anchor image:
. | 128 | min arg ,..., N N k k anc (10)
The anchor image and its preceding M (M N) brighter images and succeeding M
darker images, denoted by Yanc-M, …, Yanc, …, Yanc+M,, will yield the final set of virtual
exposure images for image fusion. Fig. 5 and Fig. 6 show two examples of selected
18
we can see that those dark virtual images which are less informative are excluded for
image fusion process.
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
(j) (k) (l)
(m) (n) (o)
Fig. 5 Selected relevant virtual exposure images (a) k = -9 (b) k = -8 (c) k = -7 (d) k =
-6 (e) k = -5 (f) k = -4 (g) k = -3 (h) k = -2 (anchor image) (i) k = -1 (j) k = 0 (k) k = 1 (l) k = 2 (m) k = 3 (n) k = 4 (o) k = 5
19 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 6 Selected relevant virtual exposure images (a) k = -14 (b) k = -13 (c) k = -12 (d)
k = -11 (e) k = -10 (f) k = -9 (g) k = -8 (h) k = -7 (anchor image) (i) k = -6 (j) k = -5 (k) k = -4 (l) k = -3 (m) k = -2 (n) k = -1 (o) k = 0
20
2.4 Classified Image Fusion
The 2M+1 virtual exposure images, denoted by Yk (k = anc-M, …, anc, …,
anc+M), having different intensities are then blended by using the proposed classified
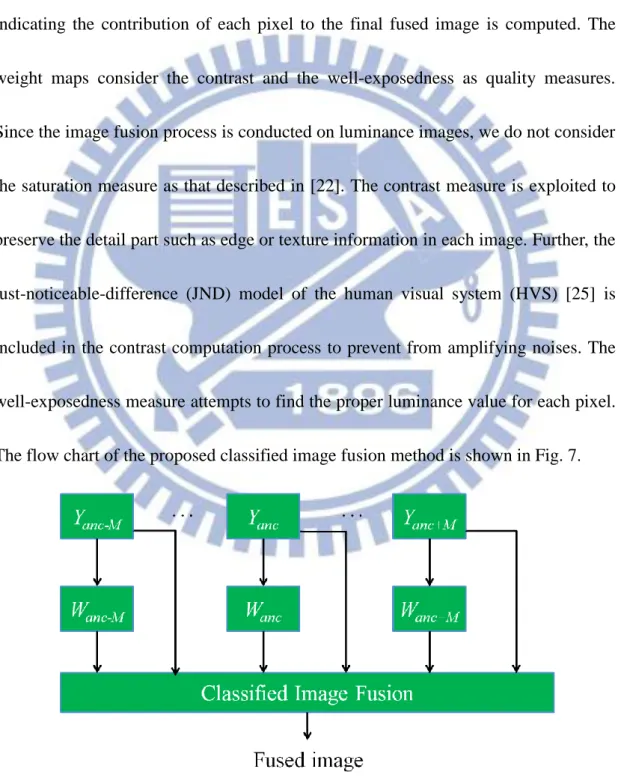
image fusion method. First, for every virtual exposure image Yk, a weighted map Wk
indicating the contribution of each pixel to the final fused image is computed. The
weight maps consider the contrast and the well-exposedness as quality measures.
Since the image fusion process is conducted on luminance images, we do not consider
the saturation measure as that described in [22]. The contrast measure is exploited to
preserve the detail part such as edge or texture information in each image. Further, the
just-noticeable-difference (JND) model of the human visual system (HVS) [25] is
included in the contrast computation process to prevent from amplifying noises. The
well-exposedness measure attempts to find the proper luminance value for each pixel.
The flow chart of the proposed classified image fusion method is shown in Fig. 7.
21
2.4.1 Just-Noticeable-Difference (JND) Model of the Human Visual
System (HVS)
JND determines the threshold of luminance difference that can be perceived by
HVS. In this thesis, the JND model proposed by Chou and Li [25], determined by the
average background intensity and the spatial non-uniformity, will be used for quality
measure evaluation. The JND value of the image pixel located at (x, y) is defined as
follows:
( ( , ), ( , )), ( ( , ))
. max ) , (x y J1 bg x y mg x y J2 bg x y JND (11)where J1 models the spatial masking effect and is defined by:
)). , ( ( )) , ( ( ) , ( )) , ( ), , ( ( 1 bg x y mg x y mg x y bg x y bg x y J
(12)where α(x) and β(x) are defined as follows:
, 115 . 0 0001 . 0 ) (x x (13) , 01 . 0 ) (x x (14)
where λ influences the visibility threshold due to spatial masking effect, bg(x, y) is the
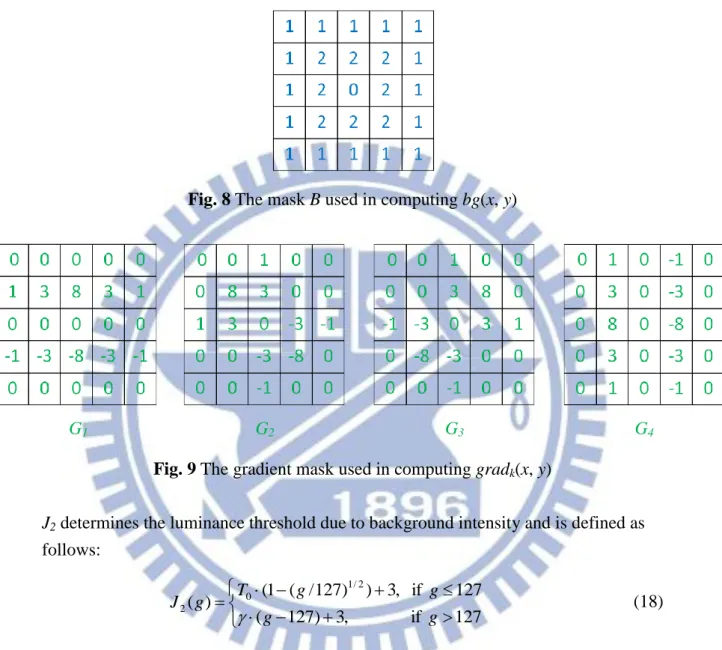
average background intensity computed by using the mask B (as shown in Fig. 8):
. ) 2 , 2 ( ) , ( 32 1 ) , ( 2 2 2 2
i j j i B j y i x Y y x bg (15)mg(x, y) is the maximum gradient value in four directions:
|}. ) , ( {| max ) , ( 4 , 3 , 2 , 1 grad x y y x mg k k (16)
22 . ) 2 , 2 ( ) , ( 16 1 ) , ( 2 2 2 2
i j k k x y Y x i y j G i j grad (17)where Gk is the k-th gradient mask as shown in Fig. 9.
Fig. 8 The mask B used in computing bg(x, y)
G1 G2 G3 G4
Fig. 9 The gradient mask used in computing gradk(x, y)
J2 determines the luminance threshold due to background intensity and is defined as
follows: 127 if , 3 ) 127 ( 127 if , 3 ) ) 127 / ( 1 ( ) ( 2 / 1 0 2 g g g g T g J (18)
where T0 and γ depend on the viewing distance between the monitor and the tester,T0
denotes the visibility threshold when the background gray level is 0, and γ denotes the
slope of the line that models the JND visibility threshold function at higher
background luminance. In this thesis, we set T0 = 17, γ = 3/128, and λ = 1/2 as
23
2.4.2 Contrast Measure
To measure the contrast of a pixel p located at (x, y) in the virtual image Yk, we
find the maximum and the minimum values (denoted by Ykmax(x,y) and Ykmin(x,y)) of its eight neighbors within a 3×3 window centered at p. Then the difference
) , (x y
Ykdif between Ykmax(x,y) and Ykmin(x,y) is calculated: ). , ( ) , ( ) , (x y Ymax x y Ymin x y Ykdif k k (19)
The difference can be considered as a simple contrast value for pixel p. If the
difference is smaller than its corresponding JND value JNDk(x,y), which implies
that there is no visible edge or texture information, the contrast measure is set to 0.
Otherwise, we set the contrast value as Ykdif(x,y). To prevent from zero weight value and variant range for different quality measures, the contrast measure for pixel p is
normalized by using the following equation:
otherwise , 256 / ) 1 ) , ( ( ) ( ) ( if , 256 / 1 ) , ( y x Y x,y JND x,y Y y x C dif k k dif k k (20)
where Ck(x,y) denotes the contrast value for the pixel located at (x, y) in exposure
image Yk. For each virtual exposure image Yk, a corresponding contrast map Ck is
computed. In total, 2M+1 contrast maps are computed. Fig. 10 and Fig. 11 show the
24 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 10 Computed contrast maps (a) C-9 (b) C-8 (c) C-7 (d) C-6 (e) C-5 (f) C-4 (g) C-3 (h)
25 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 11 Computed contrast maps (a) C-14 (b) C-13 (c) C-12 (d) C-11 (e) C-10 (f) C-9 (g) C-8
26
2.4.3 Well-exposedness Measure
Well-exposedness measure evaluates how well a pixel is exposed. Mertens et al.
[22] utilized a Gaussian distribution to model the exposedness of a pixel depending on
how close its luminance is to the target luminance values 128 (the middle value of
luminance range [0, 255]). That is, the pixels with luminance value closer to gray
level 128 should have a larger weight while the pixels with luminance far away from
128 should have a smaller weight when computing the well-exposedness measure.
Generally, the well-exposedness measure is defined as follows [22]:
. 2 ) 128 ) , ( ( exp ) , ( 2 2 y x Y y x E k k (21)
where Ek(x, y) is the well-exposedness value of the pixel located at (x, y), and σ is the
standard deviation of the Gaussian distribution which is set as 0.2×255 (the luminance
range). From Eq. (21), the well-exposedness value is bounded to be the range [0, 1].
Further, the pixel with luminance value closer to gray level 128 will be assigned a
larger exposedness value. Consequently, the luminance of each pixel in the fused
image will be adjusted toward 128. However, this does not make sense for real-life
images. For example, all dark pixels and bright pixels will be both adjusted toward
128. As a result, the global contrast will be reduced. To solve this problem, we
classify the pixels in the original image into different classes according to their
27
different classes. Intuitively, the target luminance values Yit (i = 1, 2, …, m) can be determined by finding the center of each equally-spaced interval (see Fig. 12 for an
example with cluster number m = 3).
Fig. 12 The equally-distributed target luminance values Yit with m = 3.
This method assumes that the whole luminance range (256) is divided into m
equally-spaced intervals having width R = 256/m. Further assuming that the
luminance values in each class are Gaussian distributed with width equals R = 6σe
where σe is the standard deviation of the Gaussian distribution. Thus, the target
luminance value associated with class Ωi is
. ) 2 1 (i R Yit (22)
However, the equally-spaced target luminance values, without considering property of
the input image, should be adjusted to appropriate values. For example, if the input
image is a dark one consisting of many dark pixels in Ω1, the target luminance value
t
Y1 should be adjusted as well. Similarly, if the input image is a bright one consisting
of many bright pixels in Ωm, the target luminance value Ymt should be adjusted in
28
the number of pixels in each class, will take into account the image property to find
target luminance values. Let pi denote the probability of the pixels belonging to class
Ωi in the input image. Then, the cumulative probability Cum(i) for each class Ωi is
defined as follows:
i k k p i Cum 1 ) ( (23)Thus, the target luminance range associated with class Ωi is [Cum(i-1)×255,
Cum(i)×255] (see Fig. 13) for 1im, where Cum(i) is defined as 0.
Fig. 13 The target luminance values YiPwith m = 3.
According to the probability of each class, the target luminance value is defined as the
middle value in each target luminance range:
m ..., , , i i Cum i Cum YiP ), for 12 2 ) ( ) 1 ( ( 255 (24)
Further, the mean luminance value of the pixels belonging to the largest class is
used to determine whether an input image is a dark one or a bright one. Let Ni denote
the number of pixels belonging to class Ωi. The index of the largest class is defined as
follows: . max arg 1 max i m i N n (25)
Then the mean luminance value of the largest class no
max
29 , ) , ( m a x m a x m a x ) , ( n y x o n n y x Y
(26)Finally, Yit is defined as follows:
i , ,...,m Y R i Y R i Y P i P i t i for 1 2 128 if , , ) 2 / 1 ( min 128 if , , ) 2 / 1 ( max o n o n max max (27)If the pixel belongs to Ωi, the pixel luminance value will be adjusted toward Yit.
However, if the luminance value of a pixel is near the boundary of two classes, it is
hard to determine which class this pixel really belongs to. That is, it is hard to
determine its target luminance value and thus it is impossible to correctly evaluate the
appropriate exposedness value. Therefore, we exploit the concept of fuzzy clustering
to determine the probability that a pixel belongs to a class. Let io denote in the input image the average luminance of those pixels belonging to cluster Ωi:
m i y x Y i y x o i i ..., , 2 , 1 for , ) , ( ) , (
(28)Then, the probability, computed as the likelihood that a pixel value is from each class,
is modeled as a Gaussian function:
, 2 ) ) , ( ( exp ) , ( 2 2 i o i i y x Y y x P (29)
where Y is the input image, σi is the standard deviation computed from the luminance
values of those pixels having luminance values in the range [i 1o, i 1o ]. Note that o
0
is set to 0 and m 1o is set to 255. Since the range [ 1,
o i
o i 1
30
with 1im and thus the corresponding standard deviation is multiplied by 0.75 such that every σi is computed from similar range. Fig. 14 illustrates the above
concept.
Fig. 14 The luminance range for determining σi with m = 3.
To utilize the fuzzy clustering concept, the well-exposedness value of the pixel in Yk
associated with class Ωi is defined as follows:
m ..., , , i Y y x Y y x W e t i k e i k ,for 12 ) 2 ( 2 ) ) , ( ( exp ) , ( 2 2 , (30)
Finally, the well-exposedness is defined by:
). , ( ) , ( ) , ( , 1 P x y W x y Max y x E e i k i m i k (31)
where Ek(x, y) denotes the well-exposedness value associated with the pixel located at
(x, y) in virtual exposure image Yk. By applying different target luminance values to
different classes, pixels will be adjusted toward different luminance value and thus the
global contrast can be reserved. Fig. 15 and Fig. 16 show the well-exposedness maps
produced by using the exposedness measure computed by using a single target
31
exposedness measure. From Fig. 15, by observing the sky region, we can see that
those lower exposure dark images have larger weight values than those in the brighter
images. As a result, the luminance of the sky region will decrease in the fused image.
From Fig. 16, however, by using the proposed method, E-2 has larger weight values in
the sky region and can preserve the luminance much better than Mertens’s method.
Fig. 17 and Fig. 18 show another example of computed well-exposedness maps by
using the exposedness measure proposed by Mertens el al. [22] and the proposed
32 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 15 Exposedness maps generated by using the exposedness measure proposed by
Mertens et al. [22] (a) E-9 (b) E-8 (c) E-7 (d) E-6 (e) E-5 (f) E-4 (g) E-3 (h) E-2 (i) E-1 (j)
33 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 16 Classified well-exposedness maps (a) E-9 (b) E-8 (c) E-7 (d) E-6 (e) E-5 (f) E-4 (g)
34 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 17 Exposedness maps generated by using the exposedness measure proposed by
Mertens et al. [22] (a) E-14 (b) E-13 (c) E-12 (d) E-11 (e) E-10 (f) E-9 (g) E-8 (h) E-7 (i) E-6
35 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig. 18 Classified well-exposedness maps (a) E-14 (b) E-13 (c) E-12 (d) E-11 (e) E-10 (f)
36
Finally, Wkt, denoting the weight map of the virtual exposure image Yk, is
defined as the multiplication of Ck and Ek:
). , ( ) , ( ) , (x y C x y E x y Wkt k k (32)
Because the fused image is the weighted average of these 2M+1 virtual exposure
images, we normalize each weight map, Wkt, such that for each pixel (x, y), the sum of weights among these 2M+1 weight maps equals 1:
. ) , ( ) , ( ) , (
ancM M anc i t i t k k y x W y x W y x W (33)Fig. 19 and Fig. 20 show two example of final weight maps produced by multiplying
37 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig 19 Weight maps, Wk,of each exposure image Yk generated by using the proposed
classified exposedness measure. (a) W-9 (b) W-8 (c) W-7 (d) W-6 (e) W-5 (f) W-4 (g) W-3
38 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) (k) (l) (m) (n) (o)
Fig 20 Weight maps, Wk,of each exposure image Yk generated by using the proposed
classified exposedness measure. (a) W-14 (b) W-13 (c) W-12 (d) W-11 (e) W-10 (f) W-9 (g)
39
2.4.4 Classified Image Fusion in the DWT Domain
Mertens et al. [22] have shown that if images are directly fused in the spatial
domain, there will be annoying seams at pixels where weight values change quickly.
To solve this problem, they blend the images in multiple resolutions realized by using
image pyramid decomposition. First, a Laplacian pyramid is built for each exposure
image and a Gaussian pyramid is constructed for each weight map. Then the
coefficients are combined for each level independently. Finally, the combined
coefficients are collapsed to obtain the fused image. In this thesis, the fusion method
proposed by Malik et al. [26] will be employed to merge the virtual images in discrete
wavelet transform (DWT) domain to avoid annoying seams caused by the rapid
change of weight values. Discrete wavelet transform is a well-known method to
perform multi-resolution decomposition of an image. For one-dimensional (1-D)
DWT, the input signal is filtered by a low-pass filter and a high-pass filter. The
low-pass filtering reserves the coarse information while the high-pass filtering
extracts the detail information of the input signal. Then, the filtering result is
down-sampled by a factor of two. To apply 2-D DWT to an image, 1-D DWT can be
first applied to each row of the input image. Then, 1-D DWT is again applied to each
column of the corresponding two decimated signals. This procedure completes one
40
denoted by LL, LH, HL, HH. The subimage LL preserves the coarse information of
the input image while the other subimages, LH, HL, and HH respectively correspond
to vertical, horizontal, and diagonal details. The subimage LL can be further
decomposed to four subimages by applying 2-D DWT to it. Therefore, there will be
3L+1 subimages after applying L-level 2-D DWT on the input image.
In this thesis, we apply L-level 2-D DWT on each virtual exposure image Yk in
order to produce 3L+1 wavelet subimages. Let Ykl,denotes the wavelet subimage with direction θ ({LL,LH,HL,HH}) at level l. For each weight map, Wk, a
Gaussian pyramid is constructed. Let Wkl denote the subimage of weight map at level l associated with exposure image Yk. Then the blending of these virtual exposure
images is implemented by a weighted sum of the wavelet subimages at level l
(1≦l≦L) of all virtual images with the coefficients at the same level of the Gaussian
pyramid of the weight map serving as the weights:
. ) , ( ) , ( ) , ( , ,
anc M M anc k l k l k l y x W y x Y y x F (34)where Fl,θ(x, y) denotes the fused wavelet coefficients of pixel (x, y) with direction θ at level l. The final fused image F(x, y) can be obtained by applying the inverse DWT
41
2.5 Color Components Reconstruction
Finally, the fused grayscale image, F(x, y), will be used to reconstruct the color
image. Let R, G, and B represent the red, green, blue components of the original
image respectively. To prevent from relevant hue shift and color desaturation, the
color components will be reconstructed by the following equation [23]:
( , ) ( , )
, ) , ( ) , ( ) , ( ) , ( 2 1 ) , ( R x y R x y F x y Y x y y x Y y x F y x Rr (35)
( , ) ( , )
, ) , ( ) , ( ) , ( ) , ( 2 1 ) , ( G x y G x y F x y Y x y y x Y y x F y x Gr (36)
( , ) ( , )
, ) , ( ) , ( ) , ( ) , ( 2 1 ) , ( B x y B x y F x y Y x y y x Y y x F y x Br (37) where r R , r G , and r42
CHAPTER 3
EXPERIMENTAL RESULTS
In this thesis, four different types of real-life images will be used to show the
effectiveness of our proposed method:
(1) A normal image with suitable exposure but some regions are
under-exposed;
(2) A backlight image with over-exposed and/or under-exposed regions
(3) Four low contrast images;
(4) A dark scene image.
The proposed CIF method will be compared with the following techniques:
(1) HE [1];
(2) Local gamma correction (LCC) proposed by Schettini et al. [9];
(3) Exposure correction (EC) proposed by Battiato et al. [10];
(4) Shadow correction (SC) proposed by Safonov et al. [11];
(5) Picasa software [27].
(6) A wavelet image fusion based method proposed by Pei et al. [13]
43
3.1 Experimental Results on a Normal Image
Fig. 21 shows an image with proper exposure in most areas and the enhanced
images by applying different contrast enhancement methods. Fig. 21(a) shows the
original image; we can observe that the exposure of the whole image is proper, except
that the central building is under-exposed to some extent. Fig. 21(b) shows the
enhanced image produced by HE; we can see that the central building is still not
well-exposed; however, the sky region is over enhanced. There is no big change in Fig.
21(c) produced by Picasa software [27]. Fig. 21(d) and Fig. 21(e) show the enhanced
results using EC and LCC. Though the contrast of the central building becomes better
compared to the original image, it’s still not sufficient. In Fig. 21(f), though the
central building has a better contrast, the global contrast is not satisfactory. Fig. 21(g)
shows the result using the method proposed by Pei et al. The contrast of center
building is better but still insufficient. In Fig. 21(h), the global contrast decreases. By
using the proposed CIF method, the result shown in Fig. 21(i) has a high contrast than
other enhanced images.
3.2 Experimental Results on a Backlight Image
Fig. 22 shows a backlight image and the enhanced images by applying different
44
that the tower and trees in the foreground are almost invisible. Fig. 22(b) and Fig.
22(g) yield a clear foreground. However, the washed-out appearance happens. Picasa
software enhanced very little as shown in Fig 22(c). Battiato’s EC method, Schettini’s
LCC method, and Safonov’s SC method can enhance the foreground tower and trees
to some extent. Nevertheless, the global contrast is not satisfied (see Fig. 22(d), Fig.
22(e) and Fig. 22(f)). In Fig. 22(h), the global contrast decreases severely. From Fig.
22(i), we can see that our proposed CIF method produces an image with clear
foreground and the global contrast is increased.
3.3 Experimental Results on Low Contrast Images
Fig. 23 shows a low contrast image and the enhanced images by applying
different contrast enhancement methods. Fig. 23(a) shows the original image; we can
observe that the advertise board in the left side and the building in the right side is too
dark and is not clear. Fig. 23(b) and Fig. 23(g) show the results produced by using HE
and the method proposed by Pei et al. The contrast increases, however, there is severe
false contour in the sky region. Picasa software enhances very little and the result is
shown in Fig. 23(c). Battiato’s EC method, Schettini’s LCC method, and Safonov’s
SC method can enhance the contrast a bit (see Fig. 23(d), Fig. 23(e) and Fig. 23(f)).
45
decreases severely. From Fig. 23(i), we can see our proposed CIF method produces a
pleasing, high-contrast image.
Fig. 24 shows another low contrast image and the enhanced images by using
different contrast enhancement methods. The original image is shown in Fig. 24(a).
We can observe that it is an under-exposed, low contrast image. From Fig. 24(b), we
can see that HE produces a high contrast image. However, the saturation in the bright
regions reduced. Schettini’s LCC method produces an enhanced image with
washed-out appearance and thus the enhanced image (see Fig. 24(e)) seems unnatural.
Picasa software and Safonov’s SC method can produce images with slightly better
contrast (see Fig. 24(c) and Fig. 24(f)). From Fig. 24(d) and Fig. 24(g), In Fig. 24(h),
the global contrast decreases severely. Battiato’s EC method, the method proposed by
Pei et al. and the proposed CIF method can yield comparably pleasing images with
higher contrast.
Fig 25 shows a low contrast image and the enhanced images by applying
different contrast enhancement methods. Fig. 25(a) shows the original image; we can
see that the subjects in the foreground are dark while the sky is well-exposed. From
Fig. 25(b) and Fig. 25(g), we can see that there is severe false contour in the sky
region. Fig. 25(c) shows the image produced by using Picasa software. Thought the
46
lost. Battiato‘s EC method, Schettini’s LCC method and Safonov’s SC method can
produce images with a little better contrast (see Fig. 24(d), Fig. 25(e), and Fig. 25(f)).
In Fig. 25(h), the global contrast decreases severely. From Fig. 25(i), we can see that
the proposed CIF method can produce a pleasing image with higher contrast.
Fig. 26 shows another example of low contrast image. Fig. 26(a) shows the
original image; we can see that the foreground subject is dark and in low contrast. By
comparing all the results, the contrast is insufficient for some methods (see Fig. 26(c),
Fig. 26(e), Fig. 26(f) and Fig. 26(g)). The result images produced by using HE and
Battiato’s EC method can enhance the contrast quite well, but the background is
over-exposed (see Fig. 26(b) and Fig. 26(d)). In Fig. 26(h), the global contrast
decreases severely. From Fig. 26(i), the proposed CIF method can produce
comparably pleasing images with higher contrast.
3.4 Experimental Results on a Dark Scene Image
Fig. 27 shows a dark scene image and the enhanced images by applying different
contrast enhancement methods. Fig. 27(a) shows the original image; we can see that
the subjects in the foreground are dark due to the bright neon and the Chinese lanterns.
By comparing all the results, the subjects in the foreground become clear by using HE
47
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
48
(a) Original image (b) HE (c) Picasa software
(d) EC (e) LCC (f) SC
(g) Pei’s method (h) EF (i) Proposed CIF
49
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
50
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
51
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
52
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
53
(a) Original Image (b) HE
(c) Picasa software (d) EC
(e) LCC (f) SC
(g) Pei’s method (h) EF
(i) Proposed CIF
54
CHAPTER 4
CONCLUSIONS
In this thesis, an image fusion method named classified image fusion (CIF) is
proposed for image contrast enhancement. In the proposed CIF method, several
virtual exposure images with different luminance are generated by using an imitative
“F-stop” function. Then, a classified image fusion method performed in DWT domain is designed to produce a fused image in which every region is well-exposed. Four
types of images including a normal image, a backlight image, two low contrast
images, and a dark scene image are used as the test images. The proposed method can
produce a pleasing image with every region well-exposed when comparing the
enhanced results with several methods, including HE, local gamma correction (LCC),
55
REFERENCES
[1] R. C. Gonzalez and R. E. Woods, Digital Image Processing, 2nd ed., New Jersey:
Prentice-Hall, 2002.
[2] S. M. Pizer, E. P. Amburn, J. D. Austin, R. Cromartie, A. Geselowitz, T. Greer,
B. H. Romeny, J. B. Zimmerman, and K. Zuiderveld, “Adaptive histogram equalization and its variations,” Comput. Vision, Graph., Image Process., vol. 39, no. 3, pp. 355-368, Sep. 1987.
[3] Y. T. Kim, “Contrast enhancement using brightness preserving bi-histogram
equalization,” IEEE Trans. Consumer Electron., vol. 43, no. 1, pp. 1-8, Feb. 1997.
[4] Y. Wang, Q. Chen, and B. Zhang, “Image enhancement based on equal area
dualistic sub-image histogram equalization method,” IEEE Trans. Consumer
Electron., vol. 45, no. 1, pp. 68-75, Feb. 1999.
[5] S. D. Chen and A. R. Ramli, “Minimum mean brightness error bi-histogram
equalization in contrast enhancement,” IEEE Trans. Consumer Electron., vol. 49,
no. 4, pp. 1310-1319, Nov. 2003.
[6] C. Wang and Z. Ye, “Brightness preserving histogram equalization with
maximum entropy: a variational perspective,” IEEE Trans. Consumer Electron., vol. 51, no. 4, pp. 1326-1334, Nov. 2005.