高雄應用科技大學學報 第 41 期 民國 101 年 5 月 Journal of Kaohsiung University of Applied Sciences, Vol. 41(2012)
-I-
目 錄
Contents
因子實驗設計於氯氣純化製程之應用... 魯光輝、曾清桂、陳俊豪、歐陽文忠 1 Application of Factorial Experiment Design in Chlorine Purification Process ...
...Scott Kuang-Hui Lu, Ching-Guey Tseng, Chun-Hao Chen, Wen-Chung Ou-Yang
遠距醫療系統之無線網路環境設計...劉仲鑫、曾文彥 19 Auxiliary Telemedicine system designed in wireless network environment ...
...Chung-Hsin Liu, Wen-Yen Tseng Readers Theater’s Influence on English Learning ...Hsiu Ju Lin, Wan-Yin Hsueh 35 讀者劇場對英語學習之影響...林琇如、薛婉尹
應用雙種群差分蜂群演算法於設計陣列天線...余相寬、李坤洲 63 Design of Antenna Array Using Bi-group Differential Artificial Bee Colony Algorithm...
...Siang-Kuan Yu, Kun-Chou Lee
商品評論的意見探勘之研究...李俊宏 73 A Study on Opinion Mining Techniques for the Applications of Product Reviews...
... Chung-Hong Lee Design and Implementation of 2-D Intelligent Remote-control LEGO Robot with ZigBee Sensor Network... ...Wen-Ping Chen, Shan-Chih Hsieh, Wei-Ting Lu, Song-Shyong Chen, and Luke K. Wang 93 以 ZigBee 感測技術設計 2-D 智慧遠端遙控樂高機器人... ... 陳文平、謝勝治、陸緯庭、陳松雄、王冠智 鹿港鎮文化資產之遊憩效益評估...張梨梅、闕雅文 111 The Evaluation of Recreation Value of Culture Heritage in Lukang ... ... Li-Mei Chang, Ya-Wen Chiueh 多機變速變旋角風能發電系統在隨機風速下的動態分析... ... 鄭淵元、陳盟仁、吳有基、劉國才、陳泉合 135 Simulating Dynamic Behavior of Variable-Speed Pitch-Controlled Wind Energy Conversion Systems ... Y.-Y. Zheng, M.-J. Chen, Y.-C. Wu, K.-T. Liu, C.-H. Chen
黃金與原油期貨報酬波動之共同跳躍強度研究...張鼎煥、傅家音 145 Correlated Time-varying Jump Intensity of the Gold and Crude Oil Futures... ... Ting-Huan Chang, Chia-Yin Fu 初探 App 經濟的系統與自我參照:以 Angry Birds 為例...鄭志文 161 A Preliminary Research on the System and Self-reference Features of the App Economy:A case study of Angry Birds ... Chih-Wen Cheng
高等教育實施學生學習成果評量之探討-以香港四所大學為例...鄭博真 177 The Study of Implementing Student Learning Outcomes Assessment in Higher Education- Four Universities in Hong Kong as Examples ... Bor-Jen Jeng
技職校院應用外語科系學生對「實務專題」課程的知覺研究初探:以高雄應用科技大學 應用外語系為例... 張蘭心、王昱鈞、黃士人 215 Vocational College Students’ Perception of a Project-based Course: A Case Study of National Kaohsiung University of Applied Sciences...Lan-Hsin Chang, Yu-Jun Wang, Shi-Jen Huang
中國與全球經濟秩序...蔡學儀 243 China and Global Economic Order ... William Tsai
機器人翻筋斗動作之規劃與動力模擬... 張志鋒、廖世謨、廖嘉冠 261 Motion Planning and Dynamic Simulation of the Robot Performing Somersaults ... ...Chi-Feng Chang, Shi-Mo Liaw, Chia-Kuan Liaw IPC 分類之壓鑄專利地圖研究... 姚創文、鄭守仁 281 A Research of Patent Map with respect to Die-Casting International Patent Classification... ...Chuang-Wen Yao, Shou-Jen Cheng 運用行動技術與 RFID 技術於兩校區交通車管理系統之設計與實現... ... 吳其哲、劉書宇、曾子麟、丁建文 291 Design and Implementation of a Two-Campus Transportation Management System Using Mobile Computing and RFID Technologies ... ... Chi-CheWu, Shu-Yu Liu, Tzu-Lin Tseng, Jen-Wen Ding 以經濟附加價值(EVA)建構投資組合實證分析 ...程言信、陳祺 309 The Portfolio Strategy Using EVA... Yen-Shin Cheng, Chi Chen
Wen-Ping Chen, Shan-Chih Hsieh, Wei-Ting Lu, Song-Shyong Chen, and Luke K. Wang Design and Implementation of 2-D Intelligent Remote-control LEGO Robot with ZigBee Sensor Network
-93-
Design and Implementation of 2-D Intelligent Remote-control
LEGO Robot with ZigBee Sensor Network
Wen-Ping Chen1,*, Shan-Chih Hsieh1, Wei-Ting Lu1, Song-Shyong Chen2, and Luke K. Wang1
1Department of Electrical Engineering,
National Kaohsiung University of Applied Sciences, Kaohsiung 807, Taiwan
2Department of Information Networking Technology,
Hsiuping University of Science and Technology, Taichung 412, Taiwan *E-mail: [email protected]
Abstract
LEGO MINDSTORMS NXT is a kind of scientific creative teaching aids of robotic system architecture combined with Lego Blocks and computer technology. It has a multi-institutional variability and programmable control capability, so it is very suitable for educational purpose and serving as a R&D platform. However, the function of intelligent remote control is limited to connection wire’s length and sensors being utilized, so this paper designs a wireless controller with touch sensor, accelerometer and gyroscope to intelligently control the LEGO MINDSTORMS NXT Robot. It can sense the user’s motion in two-dimension and then transmit sensor data through 802.15.4/ZigBee wireless transmission protocol to drive it. There are two different kinds of NXT robots, demonstrated in this paper; the purpose of this research is to inspire the students’ interesting and enhance their knowledge of robot field.
1. Introduction
Global disasters have been happening frequently in recent years which included not only the natural ones but also the human negligence accidents. When these natural or man-made disasters occurred, how to help rescue crews efficiently and detect the status of the disaster areas is necessary, especially rescuing survivors from any instable disaster areas. This is an urgent, worthy research issue. Fortunately, with the development of wireless network technology and robot, various rescue robots appear sequentially [1-6]. The diversity of robots are gradually replacing or assisting the human in the entertainment, complex or hazardous work environment. Robot industry will become an important Hi-Tech industry in the near future, so the governments and companies over the world have been enthusiastically researching and developing it. Hence, how to suitably build a robot learning platform for the children is an important issue. The robot tech is an integrated technology; however, it is not easy to make students feel that learning robot science is fun and easy.
Developed by the Massachusetts Institute of Technology (MIT) Media Laboratory and the Danish LEGO company in September 2005, LEGO MINDSTORMS NXT 2.0 [7], a scientific creative teaching of robotic system architecture, which combines the LEGO Bricks and computer, has a multi-institutional variability and programmable control, very suitable for education and R&D platform. It includes a
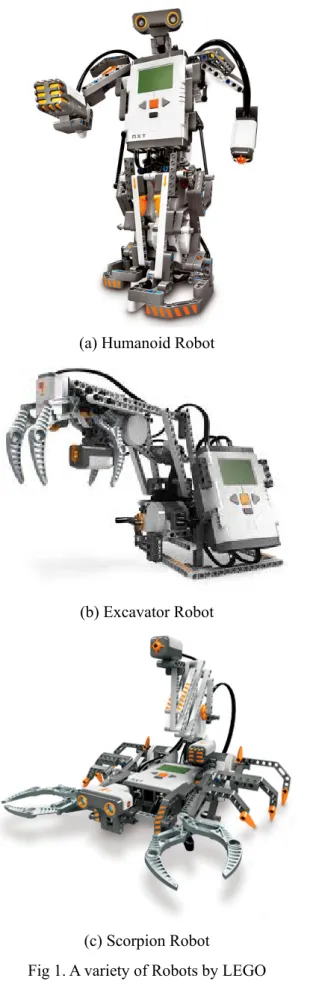
variety of LEGO bricks, sensors, servo motors and NXT host. Teacher only take some concepts of machine configuration and programming skill to inspire students; therefore, the students will design a variety of vivid and interesting NXT robot (Fig 1). Besides, [9-13] show that LEGO MINDSTORMS NXT is a very suitable platform regardless of robotics, computer science, or other scientific fields.
LEGO MINDSTORMS NXT robot modules can be assembled to a variety of different robots, but the length of cable is not long enough,; the buttons are not enough and other reasons may cause operational inconvenience for the designers. Besides, LEGO MINDSTORMS NXT has been built with a Bluetooth transceiver [14], so designer can use computer or NXT host to remotely control NXT by Bluetooth wireless network. The distance of remote control and battery life are poor for Bluetooth communication, and the volume is lager with computer or NXT host to design the controller. Therefore, the objective of our study is that we attempt to design a wireless controller module. It provides a small size controller and easy way to assemble LEGO bricks for designing some interesting remote control robots. In addition, this study also proposes a popular concept adopted from Wii’s remote control device, which can be used as a handheld pointing device and detects movement in two dimensions to intelligently control NXT robot.
Wen-Ping Chen, Shan-Chih Hsieh, Wei-Ting Lu, Song-Shyong Chen, and Luke K. Wang Design and Implementation of 2-D Intelligent Remote-control LEGO Robot with ZigBee Sensor Network
-95- (a) Humanoid Robot
(b) Excavator Robot
(c) Scorpion Robot
Fig 1. A variety of Robots by LEGO MINDSTORMS NXT 2.0
2. Research Background
In this chapter, the hardware and software of LEGO MONDSTROMS NXT, and ZigBee wireless Network are described as follows:
(1) The Hardware Architecture of LEGO MINDSTORMS NXT 2.0
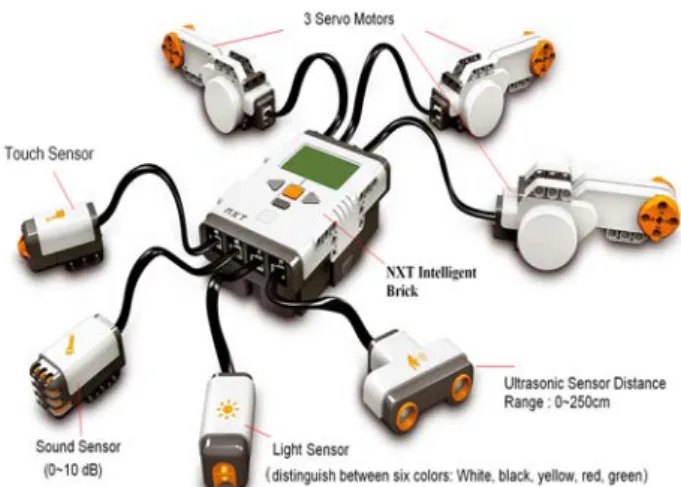
The basic LEGO MINDSTORMS NXT robot module includes the LEGO bricks, computer, and input/output devices. LEGO bricks contain a lot of bricks (as shown in Fig 2.(a) to Fig 2.(j)), such as plates, bricks, axles, pegs, belts, pulleys and so on. The Computer is the core of a programmable control unit ─ NXT as shown in Fig 2(k). The host NXT is equipped with the 32-bit ARM processor produced by the Atmel company and an 8-bit auxiliary processor; the display interface part has a 10064 pixel monochrome LCD screen; in addition to providing four buttons users are allowed to switch menus, select the program to run or do a simple button control and other activities. If user keeps communicating with the computer, he can use the USB 2.0 transmission interface, or Bluetooth wireless interface on NXT host to the link [14]. Besides, NXT's most powerful features is that it provides 4 input ports and output ports 3 groups, through which users can input and output interfaces to connect to a variety of sensors and 3 identical servo motors to enhance the functions of the robot.
(a) Long Bricks (b)Plates
(c)Bricks (d) Axles
(e) Bushings (f) Pegs
(g) Connectors (h) Wheels
(i) Gears (j)Belts and Pulleys
(k) NXT Intelligent Brick and Input/Output Devices
Fig 2. The accessory of the LEGO MINDSTORMS NXT 2.0
LEGO MINDSTORMS NXT provides four sensors, they are, touch sensor, light sensor, sound sensor and ultrasonic sensor (as shown in Fig 2(k)),; the sensors on NXT host are used through the connector of RJ12. The information of sensors data can be obtained by using analog/digital converter (ADC) or I2C serial transmission interface. In the basic applications, touch sensors can be used to detect whether there are obstacles or hit the button as a switch to drive the robot to do the movements; light sensor can be used to measure the intensity of light in one direction. To distinguish the current brightness, sound sensor can be served as a small microphone to detect the intensity of the sound or record sound,; ultrasonic sensors can be used to detect the distance between the robot and obstacles, to avoid colliding with obstacles. Besides, there are companies developing a lot of sensors for the LEGO MINDSTORMS NXT, such as
Wen-Ping Chen, Shan-Chih Hsieh, Wei-Ting Lu, Song-Shyong Chen, and Luke K. Wang Design and Implementation of 2-D Intelligent Remote-control LEGO Robot with ZigBee Sensor Network
-97-
well-known companies—mindsensors and HiTechnic [15-16]. They designed some sensors with multiple functions to support LEGO MINDSTORMS NXT module, such as color sensors, electronic compass, and infrared sensors etc. Through the installation of these sensors and linking with the NXT host to enhance the robot’s performance; however, there are four sensors that can be used at the same time with LEGO MINDSTORMS NXT due to the limit of port numbers in the NXT host.
The standard LEGO MINDSTORMS NXT robot module also contains three output ports to connect to the servo motors (as shown in Fig 2(k)). Users can also use the servo motors to connect RJ12 connectors with output of the LEGO MINDSTORMS NXT host and pulse width modulated (PWM) to drive the motor of the robot to do the movements. The motor in the LEGO MINDSTORMS NXT also has encoders, so it will not only allow the motor to forward and reverse, but also control its angle of rotation with the number of laps. For the control of the motor rotation speed, user can control it within the range from o to 100.
(2) NXT Program Development Environment
Very simple programs can be created using the NXT Intelligent Brick itself. The standard programming software is NXT-G, which is included in the shipped package. Here, additional programming software for NXT are also available, some of which is listed below:
NXT-G
LEGO and National Instruments (National Instruments, NI) [17] jointly developed a graphical programming language used to design LEGO MINDSTORMS NXT robot and integrate program development environment, which can follow users’ demand through the drag, pull, and put to add a variety of different functional blocks. In the basic LEGO MINDSTORMS NXT robot programming, you can directly use the several shared features in the block model to easily complete a program to direct the robot to move. For example, if user wants to drive with the servo motor connected to the NXT host, he can directly use the Move block, which allows users to choose which to make a motor movement, and sets the direction of rotation, rotation speed and other parameters. The measurements of sensors can be obtained in the various sub-block of the Wait Block to run the program judge. Display block can show images or text on the NXT display. Sound block can play sound on the NXT host,; in addition to Loop and Switch Blocks can be used for Loop and determine the style. A NXT program example by NXT-G is shown from Fig 3(a) to Fig 3(b). Here, a complete design loop example of NXT-G is illustrated as shown in Fig 3. (c). When the NXT host detects the event is triggered and the button of the touch sensor has been pressed by the user, the servo motor will rotate two seconds,; NXT screen displays a smiling face and sends out a
References.
[1] K. Shima, Y. Uo, and S. Fujita, (2008). “Auto configuration and management mechanism for the robotic self extensible WiFi network”, SICE Annual Conference, pp. 1648-1652, Aug.
[2] S.S. Yeh, C.C. Hsu, T.C. Shih, J.P. Hsiao, and P.L. Hsu, (2008). “Remote Control Realization of Distributed Rescue Robots via the Wireless Network,” SICE Annual
Conference, pp.2928-2932, Aug.
[3] H. Sugiyama, T. Tsujioka, and M. Murata, (2008). “Coordination of Rescue Robots for Real-Time Exploration Over Disaster Area”, the 11th IEEE International Symposium
on Object Oriented Real-Time Distributed Computing (ISORC’08), pp.170-177, May.
[4] H. Tang, X. Xie, and J. Xiao, (2010). “Design and Implement of Rescue Robot Control System Base on Wireless Network”,
International Conference on Anti-Counterfeiting Security and Identification in Communication (ASID), pp.339-342, Jul.
[5] H. Zhao and Z. Liu, (2010). “Design and Implementation of Wireless Communication Subsystem in WLAN-base Rescue Robot”,
International Conference on Internet Technology and Application, pp.1-4, Aug.
[6] H. Sugiyama, T. Tsujioka., and M. Murata, (2009). “Integrate Operations of Multi- Robot System with Ad Hoc Networking”,
the 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace &
Electronic Systems Technology, pp.535-539,
May.
[7] LEGO MINDSTORMS Webpage [Online], Available: http://MINDSTORMS.lego.com/ [8] A.M. Vollstedt, M. Robinson, and E.
Wang, (2007). “Using Robotics to Enhance Science, Technology, Engineering, and Mathematics Curricula”, Proceedings of
American Society for Engineering Education Pacific Southwest Annual Conference.
[9] M.I.G Mota, (2007). “Work In Progress- Using Lego MINDSTORMS and Robolab as A Mean To Lowering Dropout and Failure Rate In Programming Course”, the 37th ASEE/IEEE Frontiers in Education Conference, Milwaukee, pp.F4A-1-F4A-2, Oct.
[10] A.M. Brandt and M.B. Colton, (2008). “Toy in the Classroom: LEGO MINDSTORMS as an Educational Haptics Platform”,
Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems, pp.13-14, Mar.
[11] A. Pásztor, T. Kovács and Z. Istenes, (2009). “Swarm Intelligence Simulation with NXT Robots Using Piconet and Scatternet”, the
5th International Symposium on Applied Computational Intelligence and Informatics,
pp. 199-204, May.
[12] G.C. Alfonso, G.de-G. Jesus, F.L. Jesus, M. Anthony, F. M. Victor, V.V. Fernando, and J. Klaus, (2009). “Using LEGO Robots with Lab VIEW for a Summer School on Mechatronics”, Proceedings of the 2009
IEEE International Conference on Mechatronics, pp.1-6, Apr.
高雄應用科技大學學報 第41 期
-108-
[13] K.C.Y. Chin, S.M. Buhari and W.H Ong, (2009). “Impact of LEGO Sensors in Remote Controlled Robot”, International
Conference on Robotics and Biomimetics Bangkok, Thailand, pp.1777-1782, Feb.
[14] LEGO MINDSTORMS NXT Hardware Developer Kit [Online], Available: http://MINDSTORMS.lego.com/
[15] HiTechnic Webpage [Online], Available: http://www.hitechnic.com/
[16] MindSensors Webpage [Online], Available: http://www.mindsensors.com/
[17] LabView Webpage [Online], Available: http://www.ni.com/
[18] H. Yoshihiro, X. Han, and Junyu, (2009). “Robot World NXC and NXT”, Blue Ocean Culture, Mar.
[19] J.C. Hansen, “LEGO MINDSTOMRS NXT POWER PROGRAMMING : ROBOTIC IN C SECOND EDITION”, Independent Pub Group, Sep. 2009.
[20] Next Byte Codes & Not eXactly C Webpage [Online] Available: http://bricxcc.sourceforge. net/nbc/
[21] Bricx Command Center Webpage [Online], Available: http://bricxcc.sourceforge.net [22] NXT Programming Software Webpage
[Online], Available: http://www.teamhassenplug. org/NXT/NXTSoftware.htm
[23] ZigBee Alliance [Online], Available: http://www.zigbee.org
[24] IEEE 802.15 Working Group for WPAN [Online], Available: http://www.ieee802.org/15/ [25] S. Safaric, K. Malaric, (2006). “ZigBee
wireless standard, Multimedia Signal Processing and Communications”, the
48th International Symposium ELMAR,
pp.259-262, June.
[26] LEGO MINDSTORMS NXT Hardware Developer Kit [Online], Available: http://MINDSTORMS.lego.com/
[27] LEGO MINDSTORMS NXT Touch Sensor hardware schematic [Online], Available: http://MINDSTORMS.lego.com/
[28] Christopher J. Fisher, “Using an Accelerometer for Inclination Sensing [Online],” Available: http://www.analog.com