海流發電系統之海流觸壓感測器設計與數位式電力轉換器研製
蘇琨祥1、楊景雄1、郭見隆2 1國立高雄應用科技大學 電機工程學系 2國立高雄第一科技大學 機械與自動化工程系 E-mail : [email protected]摘 要
本論文旨在建立一動態海流發電系統架構,其中主要研究重點在於模擬與分析海流觸壓感測器之機構參 數設計,並且評估感測器之可行性。同時針對海流發電之能量的有效利用,研製一電力轉換器,實際量測項 目包含功率因數校正、儲能系統、直/交流轉換器等。利用微控制器來實現電力轉換器之功能。最後,利用田 口實驗設計法針對海流觸壓感測器之機構參數作最佳化之設計與分析,整理出適用於偵測海流流速之成果, 以提供海流發電相關研究人員參考。 關鍵詞:海流發電、觸壓感測器、電力轉換器、微控制器、田口方法1. 前 言
隨著科技的發展,能源已經跟人類的生活息息相關,舉凡食衣住行等都不可或缺。若能源耗盡將導致科 技發展與現今的人類生活品質不復存在。因此,為了解決能源危機,各國開始尋求替代能源方案,使得科技 與人類生活品質能夠持續下去。除了能源危機之外,人們也驚覺全球暖化與異常氣候變遷與石化能源的燃燒 排放所造成的溫室效應有所關係。也因此全球各國紛紛建立相關法令與召開會議以達到全球環保與替代能源 應用之共識,例如 1997 年簽署的「京都議定書」,以及各國陸續召開的能源高峰會等來獲得減少二氧化碳排 放與未來替代能源的走向有所共識[1]。因此具有非消耗性與兼具環保低污染的替代能源已成為各國發展與研 究目標。 在本文中,主要研究的對象為海流能與其發電系統之技術。對於海流發電而言,海流流速是影響發電量 的主因。由於海流流速與流向會隨著風驅流(Wind Driven Circulation)的影響有所變動。因此,為了獲得海流能 的最大功率,具有能夠偵測最大海流流速與流向的感測器是很重要的。目前量測海流的速度和方向的儀器裝 置分為定點海流計與漂浮測流裝置兩種[2],其中定點海流計可根據感測器工作原理,分為旋轉式海流計與非 旋轉式海流計。旋轉式海流計是利用海流動能推動機械式感測器旋轉,根據轉速與流速成正比的原理測定流 速;非旋轉式海流計則為利用聲、光、電、磁的原理測量海流,感測器並非隨海流旋轉而偵測。旋轉式海流 計結構簡單、成本低,但因感測器受旋轉而慣性大,且易受損,測量準確度低等,較不適用於表層與波浪海 流的量測。而非旋轉式沒有機械慣性,響應較快,測量精確度高,受流場的干擾小等優點,適用於準確度要 求較高的場合,但因電路和結構較複雜,所以目前以旋轉式為主。在本文中,所設計的流速感測器原理則以 非旋轉式之海流感測器為主。 在發電方面,海流經由推動葉片產生機械能帶動發電機產生電能,再經電力轉換器後可供應於負載端使 用。其中電力轉換器也是目前再生能源發展之重點,由於電力轉換器可因控制方法而達到各項功能呈現的目 的,例如:最大功率追蹤(Maximum Power Point Tracking, MPPT)[3]、功率因數校正(Power Factor Correction, PFC)[4],以及蓄電池儲能(Battery Storage)[5]等。且近年來又受到節能與環保之影響,電力轉換器也朝向減少 能源在轉換上的損耗。因此,在發電後之系統電路也是必須考量效率與功效作為設計之理念。2. 海流觸壓感測器設計
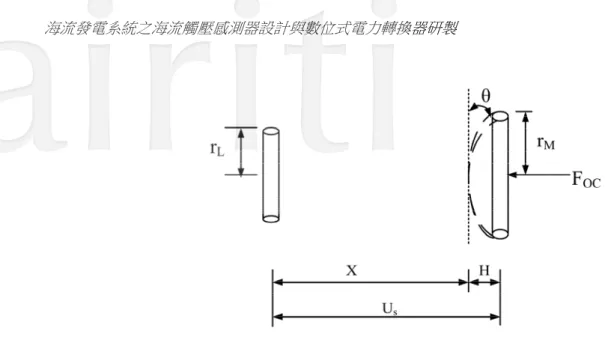
海流是一種無法即時預測其流動方向與流速之能源。但為了使得發電機能從中獲取最大之能量,因此須 保持最強流速去推動渦輪扇葉。考量到此點,因此在本文中設計一個能適用於偵測海流最大流速之感測器, 應用此感測器去偵測海流流速與方向,以達到判斷何處流速最大及方向,使得渦輪扇葉可以適當的調整位置, 去汲取最大能量使得發電機產生最大發電量之目的。 在設計上,由於海流流速相當於一種力之施加與變化,因此感測器必須具有可偵測力之大小變化之感測 技術。在本論文中,所使用的是一種電磁感應式之感測技術[6-10],此種技術為運用電感式觸控為原理而設計。 它可以偵測海流流速衝擊於葉片時施加的推力之不同與大小變化,經感測器原理可以判斷推力的大小變化, 使得水輪機組可移動於流速最大方向來取得最大能量。因此可應用於本論文中海流發電裝置於最大海流流速 之感測。以下將介紹海流觸壓感測器之原理,並進行設計,最後作一模擬海流衝擊下其感測器之偵測變化。 2.1 海流觸壓感測器之原理 觸壓感測器其機構,如圖 1 所示。從圖中可以看出主要由扁平螺旋線圈、隔離層,以及觸壓金屬導體層 所組成。而感測器動作原理是藉由通以電流的螺旋線圈所產生的電磁場,此電磁場將耦合於金屬導體層而產 生渦電流。當金屬片受到海流推力FOC產生形變時,兩者之間的距離Us會受到改變,使得兩者間會產生互感 變化,因此導致線圈電感值的變化。而此電感值變化影響線圈感應電壓的變化,偵測此感應電壓的變化即為 此感測器之運用技術,因此被稱為電磁感應式感測。且不同的力之施加將會導致感應電壓的差異,因此可從 中差異去辨別何處所受之力最為強烈,可做為判別海流最大衝擊處。為了更深入的分析感測器動作與得到良 好的機構設計,因此必須透過建立一數學模型來了解感測器動作時各參數之間的變化與關係,才可以進行設 計。 電磁感應式技術主要是應用扁平螺旋線圈與金屬導體層觸壓物之間的電感變化作為感測之技術,由於此 技術可視為兩個圓形空芯電感器來當作為螺旋線圈與金屬導體之間的關係,相當於兩電感在自由空間自感與 互感的變化,因此可將之視為下圖 2 之模型。在圖 2 相當於圖 1 之側面圖,其中左側為螺旋線圈電感表示; 而右側為金屬導體層電感表示。從圖看出金屬觸壓物受到海流推力產生一形變距離,此形變距離可稱為金屬 撓度H,也影響到兩者間之距離X的變化。在等效電路模型的建立上,由於是利用電磁耦合之概念,因此等 效電路,可如圖 2.4 所示。以下將導出等效電路相關關係式: 圖 1 海流觸壓感測單元示意圖圖 2 兩個空芯電感在自由空間互感 首先,從圖 3 中可得到兩端電壓關係式,如下兩式:
M
j
I
L
j
R
I
V
1=
1(
1+
ω
1)
+
2ω
(1)M
j
I
L
j
R
I
V
2=
2(
2+
ω
2)
+
1ω
(2) 其中 M 是兩者之間的互感值,ω 為操作頻率,如下式(2.5)所示。)
(
L
1L
2K
M
=
⋅
(3) 其中K
是磁耦合係數(Coupling Factor),為電感式觸控中受觸壓距離相關函數,須加以考慮到參數求解之中。 在耦合係數推導上,可知兩者之間的耦合係數可取決於: 2 2 3 2 2 2 cos ( ) L M L M L r r K r r r X θ = + (4) 從式(4)中可了解到耦合係數受到兩者之間的距離X、線圈半徑rL、金屬導體層半徑rM,以及金屬導體層的偏 斜角度θ
影響。因此在設計上必須探討的問題包含:隔離層、線圈與金屬導體層半徑大小設計、以及考量到 觸壓時金屬導體層的偏斜角度。因此,本論文針對這些問題將去探討與研析這些變動量對於電感式觸控模組 整體設計的影響。 圖 3 電感式觸控等效電路2.2 海流觸壓感測器之設計分析 在本文中,海流觸壓感測器是利用模擬的方式來進行設計與分析。依據上述章節之機構設計之推論與公 式來建立一模型並進行模擬。在模擬設計與分析目的上,主要在於得到最佳機構參數,如:螺旋線圈之半徑、 金屬觸壓層之長度與寬度、隔離層距離等,可使得海流觸壓感測器能夠操作於感測靈敏之範圍,使得感測器 能夠有效偵測海流之變化。而決定感測靈敏範圍的因素主要為耦合係數,這是由於當金屬觸壓層受海流推力 時會產生的金屬彈性效應與互感效應,也就是撓度變化因素與隔離層距離,影響到耦合係數的變化,如圖 4 所示。因此,在此主要的設計目標函數為:位於最佳之操作點Q下,當受到海流最大觸壓時之金屬彎曲撓度 的變化H可以使得兩者間距處於最佳點Xopt上,使得耦合係數K x( )變化量ΔK最大,也就是電感量會有最大 的變化。而最佳點 的取得主要是將圖 4 中之 X 軸與 Y 軸先對稱軸刻度與值範圍,再取曲線中距離原點最近 的點來作為最佳點。除了耦合係數變化量需最大外,撓度變化量也不可以太大,否則會導致金屬疲乏。因此, 模擬設計流程圖可如圖 5 所示。 Q 圖 4 感測器觸壓動作與曲線變化 圖 5 感測器機構設計模擬流程圖
在模擬設計中,當海流觸壓感測器的螺旋線圈、金屬觸壓層與其他不同機構設計參數下,其耦合係數與 按壓間距曲線會產生變化,如圖 6、7 所示。圖中為假設海流最大衝擊下,並固定其他機構參數時,改變金屬 觸壓層長度一半rM 與螺旋線圈半徑rL下的曲線變化,且從中可以看出不同的參數下其最佳操作點 位置皆不 同,以及曲線的幅度有所不同。除此之外,受觸壓層長度的影響撓度的變化可如圖 8 所示。因此,若要在眾 多參數變化下,得到最佳參數組合使得耦合係數變化量大的條件時較困難的及耗時的。所以,為了尋求最佳 組合以獲得設計目標,在本論文中加入最佳化實驗設計法,來得到最佳組合,並且達到設計目標。且為了化 簡繁雜的實驗與交錯驗證,在本論文中從機構參數表中,如表 1 所示,挑選最主要影響設計之因子金屬觸壓 層長度一半 Q M r 、螺旋線圈半徑rL,以及金屬寬度wM作為求解最佳化設計目標之變動因子。後續在第三章部 分,將探討最佳化設計與分析之結果。 圖 6 不同機構設計參數下的耦合係數與按壓間距曲線
、
,
(
∗:
rL=5mm rM =10mm V:
rL =5mm、
rM =15mm, :
o rL =5mm、
rM =20mm)
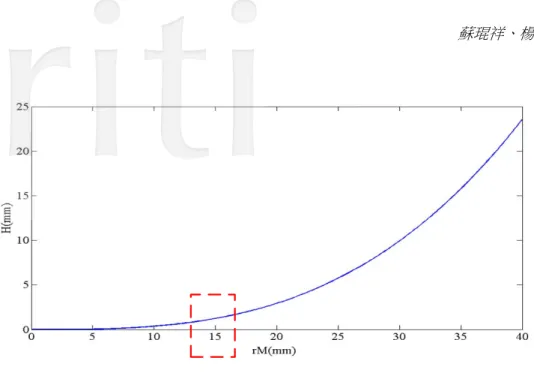
圖 7 不同機構設計參數下的耦合係數與按壓間距曲線(II) 、 , (∗ :rL=10mm rM =5mm V:rL =15mm、rM =5mm, :o rL=20mm、rM =5mm)圖 8 金屬觸壓層長度rM 與撓度變化H 曲線 表 1 海流觸壓感測器之參數設定與限制表 海流最大施加力FOC 9.8±50%(N) 金屬觸壓層長度rM <30mm 金屬觸壓層寬度wM <20mm 金屬觸壓層厚度tM 0.1mm 金屬楊氏係數Y 鋁(6.8 10× 5N mm/ 2) 螺旋線圈半徑rL <10mm
3. 海流觸壓感測器之最佳機構參數設計與分析
第 2 章中提到影響觸壓感測器之結構參數相當多,若要以一目標作設計考量時,這些結構參數組合太多 且複雜使得無法有效的取得最佳參數組合。雖然可依經驗值與多次交叉比對實驗來得到最佳參數組合。但若 當要同時考量到多個目標作為設計的話,更難從中獲得一個最佳參數組合。因此,為了有效的進行最佳化參 數設計與系統化的規劃組合分析。在本文中使用了田口法來作為設計單一目標考量下的最佳參數組合設計 [11]。 3.1 田口品質設計 在田口實驗設計上最主要的重點在於:直交表(Orthogonal Array)與參數設計兩者之規劃。在本文中,直 交表上主要以三水準三控制因子之直交表( )
3 9 3 L 作為實驗配置。在參數設計上,主要分為兩大部份:訊噪比 (Signal to Noise Ratio, SNR)與變異數分析兩者,訊噪比在此採用望大特性(Larger-The-Better)作為設計函數之目 標,因此可如式(5)所示。 ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − =∑
= n i yi n 1 2 1 1 log 10η
(5) 而在變異數分析上,其主要目的為應用統計檢定的方法來辨識個別因素之影響效果,並且利用貢獻度比來彌 補田口式實驗,無法研判各實驗參數對品質特性之影響能力及誤差程式等方面的缺陷。其基本公式如下:(1) 總平方和(Total Sum of Squares) 平方和又稱為總變動,或總變異,如下式(6)。 2 1 N i i TSS η CF = =
∑
− (6) 其中校正因子(Correction Factor, CF)為:(
)
N
CF
i 2∑
=
η
(7) 其中N為實驗次數。 (2) 主效果的平方和(變動) 對於一因子具有 P 水準,且每一水準有 m 個觀測值,那麼此因子的平方和為:( ) ( )
2 2( )
2 1 2 ... P j j j j SS CF m m m = + + + − (8) 其中j
為控制因子。若假設為 A 因子則為:( ) ( )
2 2( )
2 1 2 ... P A A A A SS CF m m m = + + + − (9) (3) 自由度 各因子的自由度等於其水準數減一;總自由度等於全體實驗的個數減一;誤差自由度為總自由度減所有 因子自由度之和。 (4) 變異數 變異數為各因子的平方和除以其自由度,如式(10)。 j j j SS V DF = (10) 因此,假設對於一因子 A 的變異數,則可定義為: A A ADF
SS
V
=
(11) 其中 SS A為 A 因子的變動,DFA為 A 因子的自由度 (5) 純變動 對於各因子之純變動可定義為: j j j SS′ =SS −DF ×VeT (12) 其中VeT 為誤差平方和的變異數,可表示為下式(13)。 e eT e SS V DF = (13) 其中誤差項的平方和SSe則為: 1 n e j j SS TSS SS = = −∑
(14) (6) 變異比 變異比為因子的變異數除以其調合誤差的變異數,如下式(15)。 j j eT V F V = (15)若假設對於一因子 A 的變異比,則為: eT A A
V
V
F
=
(16) (7) 貢獻度 貢獻度為各因子純變動所佔總變動的百分比,如下式(17)。 100% j j SS TSS ρ = ′ × (17) 若假設對於一因子 A 的貢獻度可定義為: 100% A A SS TSS ρ = ′ × (18) 3.2 耦合係數變化量之田口方法分析 觸壓感測器受海流衝擊時金屬觸壓層因形變產生彎曲會導致線圈與金屬層兩者間距縮短,影響耦合係數 變化。因此,假設此觸壓感測器在最大海流力 K FOC之衝擊下,能夠產生最大的耦合係數變化量,可使得感 測器更加敏銳偵測海流的變化,如式(19)定義。在實驗設計上,採用田口之望大設計。而田口方法的主要控制 因子如表 2 所示。 , , i i x i y = Δ =K K −KQ i (19) 表 2 主要控制因子 水準 因子 水準一 水準二 水準三 A. 線圈半徑(mm) 3 5 7 B. 金屬半長(mm) 9 12 15 C. 金屬寬度(mm) 14 16 18 其中,A 因子為螺旋線圈半徑、B 因子為金屬觸壓層之長度的一半、C 因子為金屬觸壓層寬度。藉由上 述因子設計過程之中,並採用 為本實驗配置之直交表,進行九次田口實驗模擬數據。而整個實驗配置 與模擬結果如表 3 所示。 3 9(3 ) L表 3 耦合係數變化量之模擬結果配置 實驗值
y
平均值 平均平方差 訊號雜音比 L9 A B C 1 2 3y
MSDη
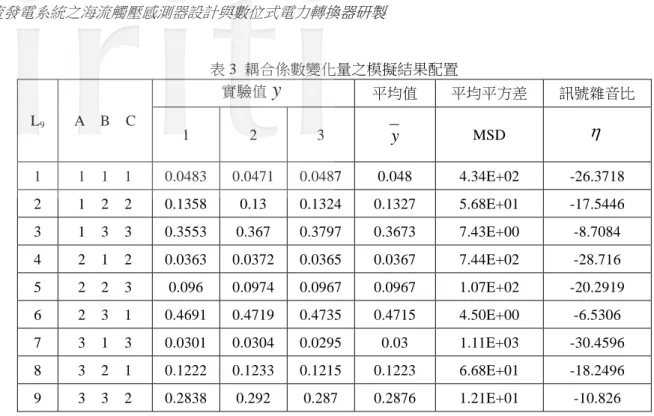
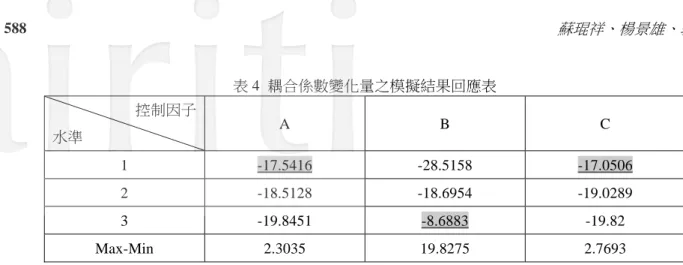
1 1 1 1 0.0483 0.0471 0.0487 0.048 4.34E+02 -26.3718 2 1 2 2 0.1358 0.13 0.1324 0.1327 5.68E+01 -17.5446 3 1 3 3 0.3553 0.367 0.3797 0.3673 7.43E+00 -8.7084 4 2 1 2 0.0363 0.0372 0.0365 0.0367 7.44E+02 -28.716 5 2 2 3 0.096 0.0974 0.0967 0.0967 1.07E+02 -20.2919 6 2 3 1 0.4691 0.4719 0.4735 0.4715 4.50E+00 -6.5306 7 3 1 3 0.0301 0.0304 0.0295 0.03 1.11E+03 -30.4596 8 3 2 1 0.1222 0.1233 0.1215 0.1223 6.68E+01 -18.2496 9 3 3 2 0.2838 0.292 0.287 0.2876 1.21E+01 -10.826 由式(20)至式(28)可得,如表 4 之回應表(
1 2 3)
13
1
A
=
η
+
η
+
η
(20)(
4 5 6)
23
1
A
=
η
+
η
+
η
(21)(
7 8 9)
33
1
A
=
η
+
η
+
η
(22)(
1 4 7)
13
1
B
=
η
+
η
+
η
(23)(
2 5 8)
23
1
B
=
η
+
η
+
η
(24)(
3 6 9)
33
1
B
=
η
+
η
+
η
(25)(
1 6 8)
13
1
C
=
η
+
η
+
η
(26)(
2 4 9)
23
1
C
=
η
+
η
+
η
(27)(
3 5 7)
33
1
C
=
η
+
η
+
η
(28)表 4 耦合係數變化量之模擬結果回應表 控制因子 水準 A B C 1 -17.5416 -28.5158 -17.0506 2 -18.5128 -18.6954 -19.0289 3 -19.8451 -8.6883 -19.82 Max-Min 2.3035 19.8275 2.7693 根據表 4 可畫出回應圖,如圖 9 所示。 -30 -20 -10 0
A(1) A(2) A(3) B(1) B(2) B(3) C(1) C(2) C(3)
A factor(level) B factor(level) C factor(level) 圖 9 因子(水準)組合之回應圖 由圖 9 各因子之 SNR 回應表可得知三因子之最佳組合為 ,由於最佳組合不在直交表裡,須再作 確認實驗,以確定此組合是否為最佳。在進行確認實驗前,可先從回應表與實驗數據之結果推估最佳解之訊 噪比情況,如式(29)。 1 3 1 A B C
(
A(1) B(3) C(1))
2 optimal avg η = η +η +η − ×η (29) ( 17.5416 8.6883 17.0506) 2 ( 18.633157) 6.014186 optimal η = − − − − × − = − 其中 ( 26.3718 17.5446 8.7084 28.716 20.2919 6.5306 30.4596 18.2496 10.826) / 9 18.633157 avg η = − − − − − − − − − = − 從式(29)推估的訊噪比約為-6.014186 比之 9 筆數據來的好。因此,可再將最佳組合參數:3mm 線圈半徑、金 屬層長度一半 15mm 與金屬層寬度 14mm 進行模擬以確認實驗。從模擬結果可得到耦合係數變化ΔK 為 0.7524、0.7652 與 0.7554 將這三筆取平均值得到 0.7576,確實為最大值、最佳組合。4. 數位式電力轉換器研製
在本論文中,海流發電系統可分為海流發電單元與後級系統轉換器電路。其中系統電路架構分別為功率 因數校正電路、及單相換流器電路,其系統架構示意圖,如圖 10 所示。圖 10 中將發電機產生之交流電壓饋 入於系統中之功率因數校正進行 AC/DC 轉換,以校正輸入電流並提高功率因數,且穩壓 200V 進入直流匯流 排(DC bus)。接著再經單相換流器直-交流轉換為交流電 110V(rms)/60Hz 輸出給負載。在系統電路運作上,本 文利用一微控制器作為控制單元來達成各項電路控制與功能之運作與實現。在本章節中,將於探討系統各級 電路設計與其控制策略。 圖 10 系統轉換器電路架構 4.1 功率因數校正電路設計 4.1.1 硬體電路設計主動式功率因數校正主要的電路架構是依靠切換式電源轉換器(Switch Mode Power Converter)作為基礎, 靠著控制功率開關元件的切換來達成系統成電阻性,並且迫使輸入電流追隨輸入電壓正弦命令來調整其波形 趨近似正弦波,使得功率因數趨近於 1 的目的。在電路拓樸中,以單開關類型中昇壓式轉換器(Boost)輸入電 流比較不受開關切換影響,導致輸入電流不連續。加上電路若操作於連續導通模式(Continuous Conduction Mode, CCM)下,則電感電流即輸入電流將處於連續狀態,易於電流模式控制。因此,本文採用之功率因數校 正電路為昇壓式轉換電路,如圖 11 所示。其中在電路元件與規格所採用,可如表 6 所示。 圖 11 昇壓式功率因數校正電路
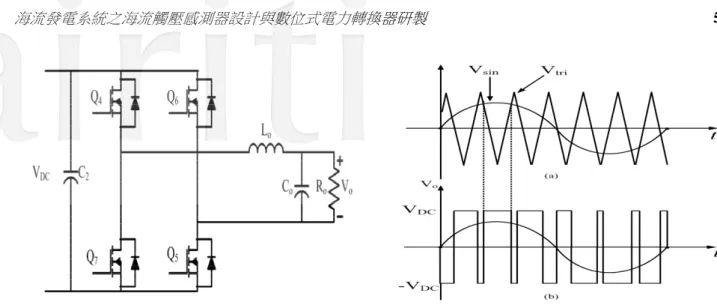
表 6 功率因數校正電路元件參數 橋式整流器 KBU1006 光耦合器 TLP250 電感 1.3mH 功率電晶體 NEC 2SK2371 穩壓電容 560 uF /400V 飛輪二極體 STTH806DTI 4.1.2 功率因數校正數位控制策略 平均電流控制法主要是控制輸入電流追隨平均弦波電流命令,來達到控制功因的目的。為了使得輸入電 流越匹配於輸入電壓,以獲得最佳的功率因數,因此控制法主要是將經整流後正弦波之正半週輸入電壓回授, 經乘法器與平均電壓平方的倒數相乘後以得到一正半週的弦波平均電流命令,以供輸入電流追隨。在控制架 構上,可分為內迴路(Inner loop)與外迴路(Outer loop)兩種,如圖 12 所示。內迴路在於控制輸入電流追隨平均 弦波電流命令;外迴路則是控制輸出直流電壓具有穩壓的效果,其中各迴路中必須利用控制補償器來達到控 制的目的,最後控制器輸出之值可控制功率開關元件的 PWM 責任週期變化,來達到功率因數校正的目的。 在功率因數校正控制架構上使用了三種補償器:電壓補償器、前饋電壓補償器,以及電流補償器[12-13]。 圖 12 功率因數校正控制架構示意圖 4.2 單相全橋換流器設計 4.2.1 硬體電路設計 在本文中,所使用的單相換流器電路為全橋式架構,如圖 13 所示。且為了抑制諧波輸出端加上了 LC 低 通濾波器(Low-Pass Filter)來消除高次諧波,以獲得更佳之輸出波形。而在功率開關元件閘極驅動訊號所使用 的脈波寬度調變方式為正弦式脈波寬度調變(Sinusoidal Pulse Width Modulation, SPWM)。在功率開關切換方 式,如圖 14 所示,採用雙極性切換的方式:
(a) 當信號Vsine>Vtri 觸發電晶體Q 、4 Q 導通,負載兩端電壓為5 VDC。
(b) 當信號Vsine<Vtri 觸發電晶體Q 、6 Q 導通,負載兩端電壓為7 −VDC。
圖 13 單相全橋換流器 圖 14 (a)SPWM 示意圖;(b)輸出電壓波形圖 表 8 單相全橋式換流器電路元件參數 濾波電容 100uF/25V 光耦合器 TLP250 穩壓電容 470 uF /250V 功率電晶體 IRFP460 濾波器電感Lo 17mH 濾波器電容Co 1μ F 4.2.2 輸出穩壓控制策略 單相全橋換流器的穩壓控制架構,如圖 15 所示。由於輸出電壓為交流弦波,需再經過電壓感測回授電路, 再進入數位控制器 A/D 腳位,如圖 16 所示。圖中電壓感測回授電路利用一變壓器作為隔離效果,再經電阻分 壓後進入平移電路消除負半週波形以進入微控制器之 A/D。在控制方法上,主要利用 PI 控制器來實現。在回 授中除了輸出電壓回授外,另外還需要輸入電壓之回授訊號,這是由於換流器正弦脈波寬度調變的比例為電 壓增益,因此以輸入電壓回授為命令訊號,再與輸出電壓經控制器控制,可使得 SPWM 調變性具有線性關係, 更佳能維持控制器的穩定性[14]。 圖 15 穩壓控制架構示意圖 圖 16 電壓感測回授電路
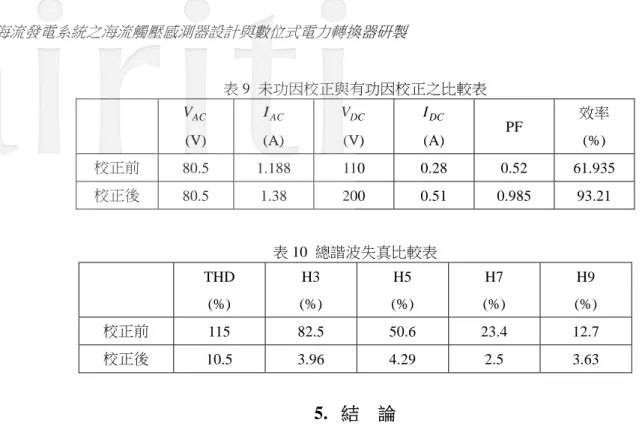
4.3 實測硬體電路結果分析與探討 實驗結果分析主要分為功率因數校正電路、雙向轉換器及單相換流器電路。首先,經功因校正電路後可 將輸入電流校正,並且穩定輸出直流電壓 200V,而實驗結果如圖 17、18 所示。從圖 17 中可以看到輸入電流 已被校正為接近正弦弦波之波型,並且圖 18 中可以看出輸出電壓具有穩壓 200V 之效果。接著,圖 19、20 則為未校正與校正之總諧波失真圖 THD,也都比之未校正之諧波衰減許多。最後,將結果整理如表 9、10 所 示。 在單相換流器的部份,則為將直流電壓轉為交流穩壓輸出供給負載使用。在圖 21 中可以看到輸出交流電 壓約為 110V(rms),電流振幅約為 0.5A。在初期供電響應上,可如圖 22 所示,其為電壓暫態響應圖。從圖中 可看出在直流電壓輸入超過 150V 後,其輸出電壓就能維持穩壓,不會隨著輸入電壓提高而提高。 -150 -100 -50 0 50 100 150 0 0.0070.0140.0220.0290.0360.043 時間(t) 輸入電壓 (V) -6 -4 -2 0 2 4 6 輸入電流 (A) 輸入電流 輸入電壓 0 50 100 150 200 250 0 0.0072 0.0144 0.0216 0.0288 0.036 0.0432 時間(s) 輸出電壓 (V) 0 0.5 1 1.5 2 2.5 3 輸出電流 (A) 輸出電壓 輸出電流 圖 17 輸入電壓與輸入電流波形圖 圖 18 輸入電壓與電流波形圖 圖 19 未校正之 THD 波形圖 圖 20 校正之 THD 波形圖 -200 -150 -100 -50 0 50 100 150 200 0 0.0070.0150.022 0.03 0.0370.044 時間(s) 輸出 電壓 (V ) -2 -1 0 1 2 輸出 電流 (A ) 輸出電壓 輸出電流 -250 -150 -50 50 150 250 0.6 0.64 0.68 0.72 0.76 0.8 0.84 0.88 0.92 0.96 1 時間(s) 電壓 (V ) -2 -1 0 1 2 電流 (A ) 輸出電壓 輸入電壓 輸出電流 圖 21 穩壓控制架構示意圖 圖 22 電壓感測回授電路
表 9 未功因校正與有功因校正之比較表 AC V (V) AC I (A) DC V (V) DC I (A) PF 效率 (%) 校正前 80.5 1.188 110 0.28 0.52 61.935 校正後 80.5 1.38 200 0.51 0.985 93.21 表 10 總諧波失真比較表 THD (%) H3 (%) H5 (%) H7 (%) H9 (%) 校正前 115 82.5 50.6 23.4 12.7 校正後 10.5 3.96 4.29 2.5 3.63
5. 結 論
在本文中,利用電感式感測原理來設計一個可應用於偵測海流流速變化之觸壓感測器。並且針對最佳的 操作條件下之機構參數設計,利用口口最佳化實驗設計法來探討與分析最佳機構參數組合。另一方面,為了 有效利用海流發電之電能,研製一電力轉換器系統,並經由實際負載測試,驗證各電路之功效與可行性,並 將結果整理並歸納以下幾點: 1. 經分析海流觸壓感測器之機構設計與工作原理,並從工作原理中找到適當的操作條件,符合感測最大變 化範圍之設計。 2. 利用模擬的方式來了解海流衝擊感測器時之特性變化,並從中模擬數據結果取得合理的參數設計條件。 3. 本文針對感測器之耦合係數變化量最大的條件下的機構參數組合,利用實驗設計之田口方法,並且可以 預測一組最佳解具有可使得耦合係數變化最大之反應。 4. 在功率因數校正方面,利用微控制器實現平均電流控制法,從實驗結果中可以發現輸入電流已校正近似 弦波,而功率因數 PF 可達 0.985;總諧波失真 THD 為 10.5%。 5. 在 DC/AC 單相全橋換流器上,同樣結合微控制器來達成輸出電壓穩壓之效果。從實驗結果中發現負載 的變化下都能保持輸出電壓維持穩定。參考文獻
[1] 聯合國氣候變化框架公約:京都議定書,http://www.teta.org.tw/EN/kp_c.pdf。
[2] 測流裝置,http://tinyurl.com/2cyo3zo。
[3] Amon, E. A., Schacher, A.A. and Brekken, T. K. A., “A Novel Maximum Power Point Tracking Algorithm for Ocean Wave
Energy Devices,” IEEE on Energy Conversion Congress and Exposition, pp. 2635-264, Sep. 20091.
[4] Carbone, R., “A high performance rectifier for electrical power generation from marine currents,” International Symposium
on Power Electronics, Electrical Drives, Automation and Motion, pp. 1155-1160, June 2008.
[5] Zahedi, A., “Energy, People, Environment. Development of an Integrated Renewable Energy and Energy Storage System,
an Uninterruptible Power Supply for People and for Better Environment,” IEEE on Humans, Information and Technology Conference, Vol. 3, pp. 2692-2695, Oct. 1994.
[6] Horler, G. D., Hindle, S. J. and McGorman, D., “Inductively Coupled Telemetry and Actuation,” IEE on Telemetry and
Telematic, pp. 5/1-5/6 s, Apr. 2005.
[7] Welsby, V. G., The Theory and Design of Inductance Coils, John Wiley and Sons, Inc, 1960.
[8] Frederick W. Grover, Inductance Calculations Working Formulas and Tables, Dover Publications, Inc, New York, 1946.
[9] Finkenzeller, K., RFID Handbook:Fundamentals and Application in Contactless Smart Cards and Identification, John
Wiley & Sons, Ltd, 2003.
[10] “Introduction How to Use RFID,” Holtek.
[11] 葉怡成,實驗計劃法-製程與產品最佳化,五南,台北,2001。
[12] Ekemezie, P. N., “Design of a Power Factor Correction AC-DC Converter,” Africon Conference, pp. 1-8, Sept. 2007. [13] Manjing Xie, “Digital Control for Power Factor Correction,” Virginia Polytechnic Institute and State University, June 2003. [14] Kecun G. and Yuxing, D., “DSP Control Method of Single-Phase Inverters for UPS Application,” IEEE Proceedings