國 立 交 通 大 學
電控工程研究所
碩 士 論 文
使用多率濾波器脈波寬度調變於
切換式磁阻馬達控制
Switched Reluctance Motor Control Using
Multi-rate Filter Pulse Width Modulation
研 究 生: 李 業 文
指導教授: 胡 竹 生 博士
中 華 民 國 一〇二 年 七 月
使用多率濾波器脈波寬調變於切換式磁阻馬達控制
Switched Reluctance Motor Control Using
Multi-rate Filter Pulse Width Modulation
研 究 生:
李業文
Student: Lee Yeh Wen
指導教授:
胡竹生 博士
Advisor: Prof. Jwu-Sheng Hu
國 立 交 通 大 學
電 控 工 程 研 究 所
碩 士 論 文
A Thesis
Submitted to Institute of Electrical and Control Engineering
College of Electrical and Computer Engineering
National Chiao-Tung University
in Partial Fulfillment of the Requirements
for the Degree of Master
In
Electrical and Control Engineering
July 2013
使用多率濾波器脈波寬調變於
切換式磁阻馬達控制
研究生:李 業 文
指導教授:胡 竹 生 博士
國立交通大學
電控工程研究所碩士班
摘 要
本論文針對切換式磁阻馬達的電流控制策略提出了多率濾波器脈波寬度 調變 (Multi-rate Pulse Width Modulation, MRFPWM) 的方法,以改善目前廣泛 使用的脈波寬調變 (Pulse Width Modulation, PWM) 的效能。本論文利用濾波器 來作電流誤差的補償使得降低量化誤差同時利用多率系統將兩個 PWM 訊號合併 製作一個非對稱脈波寬度調變來降低功率電晶體之切換次數及降低功率級的 損失,因此能夠有效地降低功率開關元件的溫度並增加其壽命。此外,本論文 也發展了高效率角度控制策略,以降低額外產生之銅損為目的,調整最佳化切 換角度,同時能夠達到定轉矩控制的條件,爲了證實此方法之可行性也以用理 論運算為基礎,透過系統分析驗證此方法在某種條件下能夠發揮最高效率。本 論文是採用低成本的 32 位元控制器與三相非對稱控制器,透過實驗來比較幾 個不同的電流控制策略;包括 PWM、非對稱脈波寬調變 (Asymmetric Pulse Width Modulation, APWM) 、 具 濾 波 器 脈 波 寬 度 調 變 (Filter Pulse Width Modulation, FPWM) 以及 MRFPWM。實驗結果顯示,在相同的負載下比較不 同轉速,其 MRFPWM 之效率都優於其他控制策略,且切換次數降低一倍使 得功率電晶體之表面問題也相對的減少,這不僅能夠提高功率電晶體的效率且 增加使用壽命。High Efficiency Switched Reluctance Motor Control
Using Multi-rate Filter Pulse Width Modulation
Student: Yeh Wen Lee
Advisor: Prof. Jwu-Sheng Hu
Institute of Electrical and Control Engineering
National Chiao-Tung University
Abstract
This thesis proposed a novel scheme for current control of switched reluctance motor by using multi-rate filter pulse width modulation to improve the efficiency of traditional pulse-width modulation. We utilized a filter to compensate the error current for reducing the error current and generating an asymmetrical pulse width modulation, which is the combined by two PWM signals produced by multi-rate system. This method can reduce the switching loss of power transistor and decrease power consumption. Thus, the temperature of the power switching element will be reduced and provide a long life span. In addition, we also developed a high efficiency angle control strategy, the purpose is to lower extra copper loss, simultaneously able to achieve constant torque controlled conditions. In order to verify the feasibility of this method are used as the basis of theoretical operations, through systematic analysis of verification under certain conditions, this method can play a maximum efficiency. The implementation of our system is using a low-cost 32-bits controller and a three-phase asymmetric half bridge inverter. In our experiment, we compared the various speeds in the same load with different current control strategies such as PWM, APWM, FPWM
誌 謝
我很高興也很榮幸能夠進入胡竹生教授的實驗室(X-Lab),在這短短的兩年來 胡老師的細心指導下學會了很多創新與寶貴的知識,我自認我自己理論能力比較 弱,感謝老師給與的鼓勵與支持,激發了我跟深入研究的動機與想法。老師總是 給予明確的指點、方向以及資源。在我眼裏,老師是個比較少開玩笑、嚴肅且非 常酷的老師,我十分的尊敬他。進入 X-Lab 這個大家庭,學到很多學術相關的知 識,對於做研究的態度以及積極面對問題解決的能力都有所進步,直到能夠順利 完成碩士學位。感謝口試委員成維華老師、陳鴻祺老師的建議以及陳鏗元學姐的 鼓勵,讓我能夠發現論文裡的不足並加以補強,使之更完整。 完成碩士論文是自己的責任,但是這確是涵蓋著大家的協助、指導以及鼓勵, 這裡我必須感謝 X-Lab 的所有實驗室成員,在這兩年裏與你們一起研究、學習、 聚餐、運動、遊玩等。首先,感謝直屬學長, 馬達組的強者昭男學長在理論指教 以及各方面的幫忙,一起運動、研究、實驗等;全能超強的 JUDO 學長在帶助教 課的教導;我看到了學長學弟妹們在研究上的熱誠與積極的態度,給予我一股衝 勁想要讓自己活得更有價值,很感謝實驗室一起打拼的學長學弟妹們,對我而言, 你們總是那麽的崇高,是值得欣賞以及學習的典範,包括帥氣的明唐學長給予一 些寶貴的經驗、一起打羽球的勁源學長、美食家的俊吉學長總是給予正確的思考 方向、強者 Alphar 學長、大哥耕維學長在嵌入式作業系統課程的協助、馬達達人 的德洋讓我體會到學術研究與業界研發之間的差異、成熟穩重的震華學長等。還 有同一屆一起打拼的實驗室同學們,一起面臨口試、一起寫論文、一起修課等都 是一種美好的回憶,感謝有你們同在,包括鳴遠、期元、哲宇、冠宏、孟瑋、淵 翰。此外,還要感謝馬達組做事認真的綜韓學弟、幽默搞笑的品毅學弟、活泼的 文娟學妹以及未來加入馬達組的學弟妹們,未來靠你們了。看到新加入的學弟妹 們加入這個大家庭都感到非常高興,希望能夠讓 X-Lab 這個大家庭越來越有氣 勢。 此外,我要感謝協助我完成論文的人,有肌肉男 CUP 大大、笑容甜美的依穎 以及幽默搞笑的同鄉朋友紹祥等。最後我要感謝我的爸爸媽媽給我的支持、送我 來臺灣、無微不至的體諒我以及教導我等等,當然還有我崇拜的哥哥,你總是那 麽的穩重平靜的處理事情;可愛的妹妹總是那麽關心我以及體貼我;還有恒瑜姐 姐總是那麽的挺我以及照顧我。我想感謝支持我的所有人、把我當朋友的所有人 以及在求學過程中遇到的所有老師。目 錄
摘 要 ... i Abstract ... ii 誌 謝 ... iii 目 錄 ... iv 表目錄 ... vi 圖目錄 ... vii 符號表 ... ix 縮寫表 ... xii 第一章 緒論 ... 1 1.1 研究動機 ... 1 1.2 研究目標 ... 3 1.3 文獻回顧 ... 3 1.4 本論文的貢獻 ... 6 1.5 論文架構 ... 7 第二章 切換式磁阻馬達介紹 ... 8 2.1 前言 ... 8 2.2 切換式磁阻馬達結構特性 ... 9 2.3 切換式磁阻馬達的驅動器與角度定義 ... 11 2.4 切換式磁阻馬達數學模型 ... 19 2.4.1 切換式磁阻馬達等效電路 ... 20 2.4.2 切換式磁阻馬達轉矩產生與能量轉換原理 ... 22 第三章 切換式磁阻馬達控制策略 ... 26 3.1 前言 ... 26 3.2 轉矩控制 ... 26 3.2.1 即時直接轉矩控制 ... 27 3.2.2 轉矩分擔控制 ... 29 3.3 最佳切換角度控制 ... 33 3.3.1 提前導通角控制 ... 33第四章 多率濾波器脈波寬調變 ... 47 4.1 前言 ... 47 4.2 傳統脈波寬度調變電流控制 ... 47 4.2.1 非對稱脈波寬調變 ... 48 4.3 多率濾波器脈波寬調變原理 ... 50 4.3.1 最佳化量化誤差補償 ... 55 4.3.2 系統分析 ... 57 4.3.3 多率系統誤差補償 ... 59 第五章 系統開發環境與架構 ... 61 5.1 前言 ... 61 5.2 硬體系統架構 ... 62 5.2.1 Renesas 發展平臺 ... 62 5.2.2 非對稱驅動器平臺 ... 64 5.2.3 三相切換式磁阻馬達 ... 66 5.3 軟體系統架構 ... 69 5.3.1 軟體發展環境 ... 69 5.3.2 程式整體架構 ... 71 5.3.3 回授訊號處理 ... 72 5.3.4 PI 控制器 ... 74 5.3.5 多率濾波器回授調變之實現流程 ... 75 5.4 實驗平臺 ... 76 第六章 實驗結果分析 ... 77 6.1 前言 ... 77 6.2 最佳化角度控制實驗 ... 78 6.3 脈波寬度電流控制實驗 ... 82 第七章 結論 ... 91 參考文獻 ... 92
表目錄
表 2.2‑1: 比較常見的相數相對應定子/轉子極數的選用 ... 10 表 2.3‑1:轉子角度區間對應其意義 ... 12 表 4.2‑1: 比較中間對稱與非對稱脈波寬度調變 ... 50 表 5.2‑1: 對應圖 5.1-2 之編號功能的敍説 ... 63 表 5.2‑2: 三相切換式磁阻馬達規格 ... 66 表 6.2‑1: 每秒之功率開關之切換次數 ... 81 表 6.3‑1: 中間對稱 PWM 與中間非對稱 PWM 效率比較 ... 84 表 6.3‑2: 所有控制策略於閉迴路之速度誤差比較表 ... 85 表 6.3‑3: 所有控制策略於閉迴路之切換次數比較表 ... 87 表 6.3‑4 功率開關表面之末溫 ... 88 表 6.3‑5: 所有控制策略於閉迴路之效率比較表 ... 89圖目錄
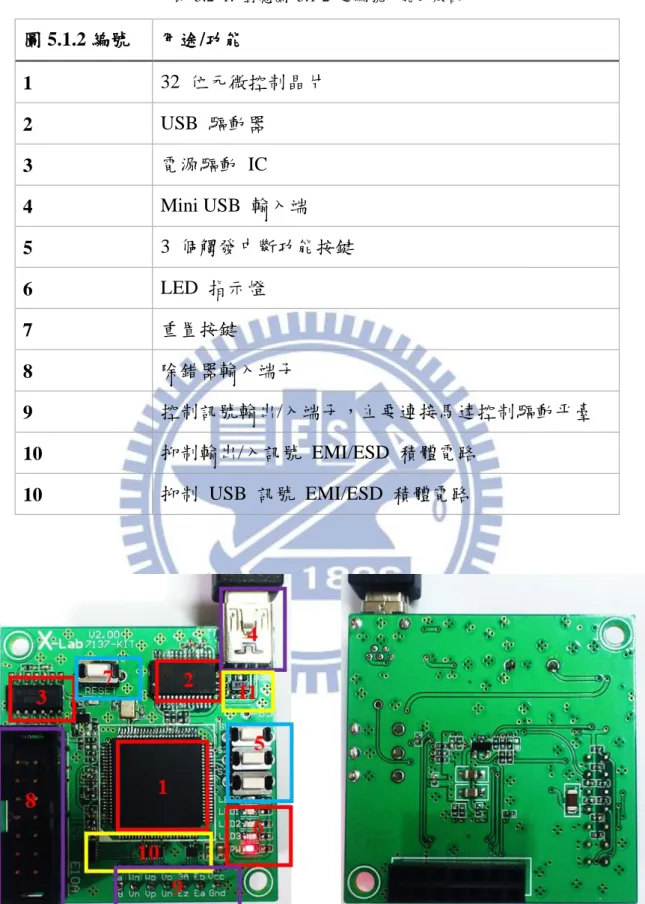
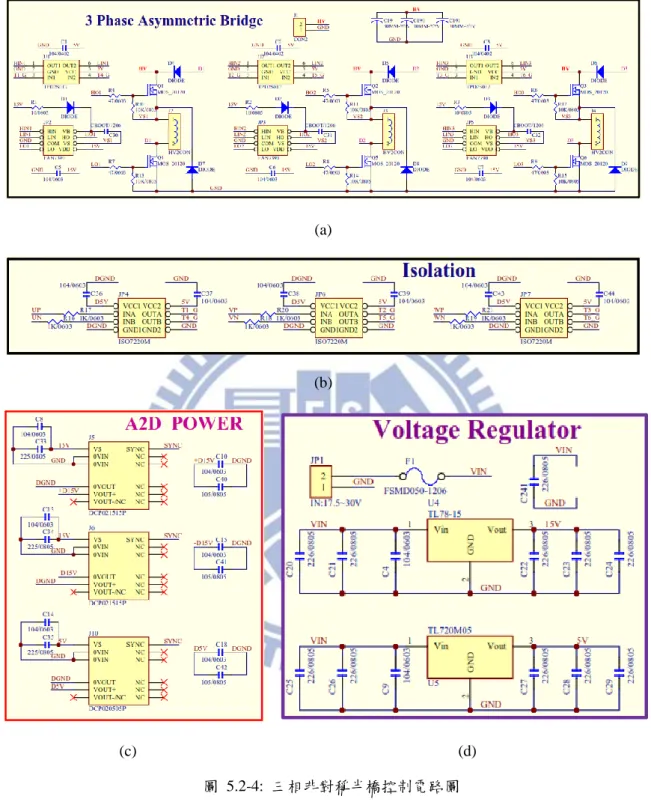
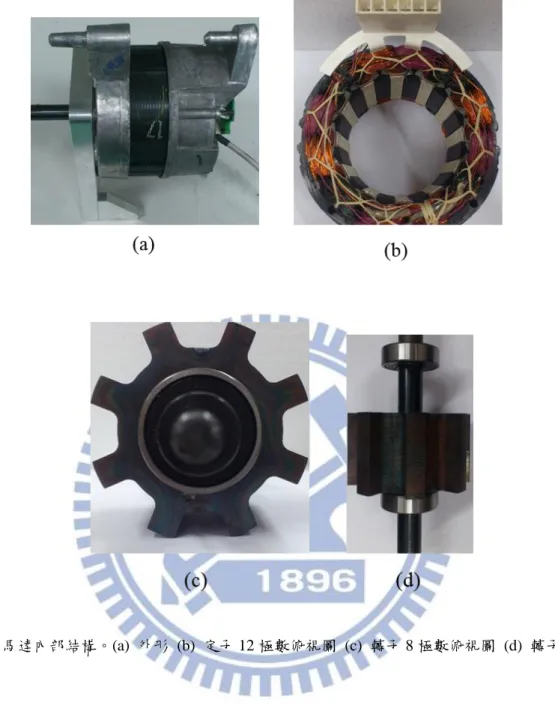
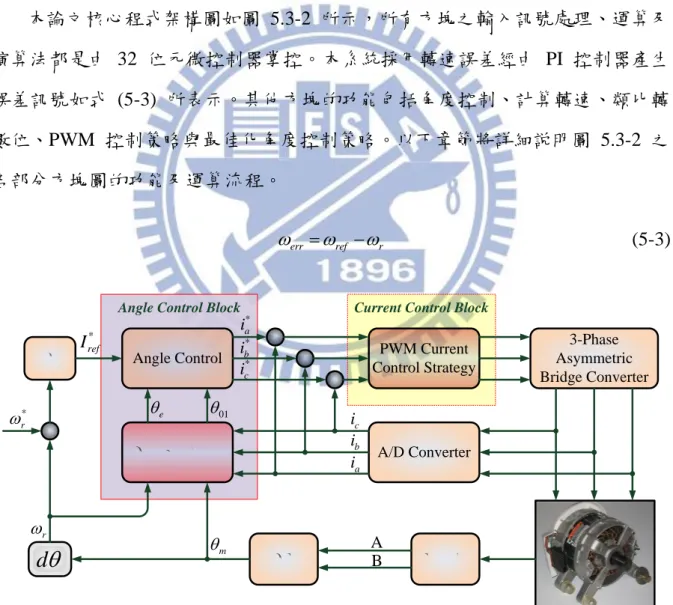
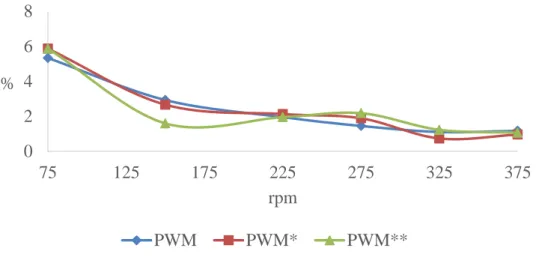
圖 1.1-1: 全球終端電力消費 [5]... 2 圖 2.2-1: 單相切換式磁阻馬達利用永久磁鐵來啓動 ... 9 圖 2.2-2: 12/8 極切換式磁阻馬達之結構。(A) 定子 A 相與轉子對準 (B) 定子 A 相與轉子未對準 ... 10 圖 2.3-1: (A) 考慮幾個重要的轉子角度定義 (B) 轉子角度對應電感值得表示圖 ... 13 圖 2.3-2: 基本控制切換式磁阻馬達的狀態。(A) 激磁 (B) 飛輪傳動 (C) 去磁 ... 15 圖 2.3-3: 依相數與開關數分類切換式磁阻馬達控制器 ... 15 圖 2.3-4: 三相米勒控制器... 16 圖 2.3-5: 米勒控制器在兩相重疊同時導通時兩相電流的變化 ... 17 圖 2.3-6: 非對稱半橋變頻器。(A) 單相示意圖 (B) 硬切換策略 (C) 柔切換策略 ... 18 圖 2.4-1: 切換式磁阻馬達模型概念圖 ... 19 圖 2.4-2: 單相切換式磁阻馬達等效電路圖 ... 21 圖 2.4-3: 能量轉換示意圖。(A) 線性 (B) 非線性 ... 23 圖 2.4-4: 推導非線性電磁轉矩示意圖 ... 24 圖 2.4-5: 切換式磁阻馬達之能量流通示意圖 ... 25 圖 3.2-1: 即時直接轉矩控制迴授方塊圖 ... 27 圖 3.2-2: 遲滯控制函數之三個區間的示意圖 ... 27 圖 3.2-3: 轉矩分擔控制函數之控制方塊圖 ... 29 圖 3.2-4: (A) 線性轉矩分擔函數 (B) 弦波轉矩分擔函數... 30 圖 3.2-5: 直接轉矩控制結合轉矩分擔控制方塊圖 ... 31 圖 3.2-6: 兩相重疊在不同參考轉矩與實際轉矩下電流軌跡的示意圖 ... 32 圖 3.3-1: 單一相激磁電流的示意圖 ... 33 圖 3.3-2: 考慮磁交鏈在兩相重疊的情況 ... 35 圖 3.3-3: 角度補償的示意圖 ... 36 圖 3.3-4: 角度補償的方塊圖。(A) 補償提前導通角 (B) 補償關閉角度 ... 37 圖 3.4-1: 考慮提前導通角度時電流上升產生額外銅損的示意圖 ... 39 圖 3.4-2: 考慮銅損在兩相重疊區域的電流控制 ... 39 圖 3.4-3: 角度補償限制出去相電流的方塊圖 ... 40 圖 3.4-4: 電流分擔控制定轉矩的方塊圖 ... 41 圖 3.4-5: 兩相重疊電感區的電流控制示意圖 ... 43 圖 3.4-6: (A) 激磁電流上升時間 (B) 去磁電流上升時間 (C) 兩相重疊區域的時間 ... 46 圖 4.2-1: (A) 單邊非對稱脈波寬度調變 (B) 中間對稱脈波寬度調變 ... 48 圖 4.3-1: 三相非對稱半橋電壓源變頻器 ... 51 圖 4.3-2: 4 位元脈波解析度之對稱 PWM 切換訊號 ... 52 圖 4.3-3: 以狀態空間描述最佳化輸出的示意圖 ... 55 圖 4.3-4: 量化誤差補償方塊圖 ... 56圖 5.2-1: RENESAS STARTER KIT FOR SH713 開發平臺。(A) 微控制晶片板 (B) E10A 除錯器 ... 62 圖 5.2-2: 自行開發 SH7137 控制器平臺 ... 63 圖 5.2-3: 三相非對稱半橋控制 PCB 板子 ... 64 圖 5.2-4: 三相非對稱半橋控制電路圖 ... 65 圖 5.2-5: 馬達內部結構。(A) 外形 (B) 定子 12 極數俯視圖 (C) 轉子 8 極數俯視圖 (D) 轉子側面圖 ... 67 圖 5.2-6: 不同角度激磁電流 (黃色) 的波形。(A)定子與轉子未對準 0º (B) 定子與轉子對準 21º ... 68 圖 5.2-7: 實際量測電感值的趨勢 ... 68 圖 5.2-8: 切換式磁阻馬達在不同電流與角度下特性的變化 (A) 磁交鏈 (B) 電感值 (C)共能量 ... 69 圖 5.3-1: 人機介面。(A) 磁阻馬參數設定 (B) 即時觀測狀態變數功能 ... 70 圖 5.3-2: 整體的程式架構示意圖 ... 71 圖 5.3-3: 編碼器介面方向判斷方式 ... 73 圖 5.3-4: 實驗實現之方塊圖 ... 75 圖 5.4-1: 三相切換式磁阻馬達的實驗平臺 ... 76 圖 6.1-1: 開迴路程式架構示意圖 ... 78 圖 6.2-1: 個別圖最上方表示沒有使用最佳化角度控制的電流波形圖,中間為採用最佳化控制角度的電流 波形圖,下面為採用具限制條件之最佳化角度控制。(A) 轉速為 75 RPM (B) 轉速為 225 RPM (C) 轉速 為 325 RPM ... 79 圖 6.2-2: 比較三個角度控制策略之速度漣波誤差 ... 80 圖 6.2-3: 比較三個不同角度控制的轉矩漣波 ... 80 圖 6.2-4: 比較三個角度控制策略之功率開關的表面溫度 ... 80 圖 6.2-5: 比較三個角度控制策略之效率 ... 81 圖 6.3-1: 兩相電流重疊比較圖。(A) PWM (B) FPWM ... 82 圖 6.3-2: 中間對稱 PWM 與濾波器 PWM 效率比較 ... 82 圖 6.3-3: 中間對稱 PWM 與中間非對稱 PWM 功率開關表面溫度比較 ... 83 圖 6.3-4: 中間對稱 PWM 與中間非對稱 PWM 切換次數比較... 84 圖 6.3-5: 綜合所有控制電流策略之速度誤差 ... 86 圖 6.3-6: 綜合所有控制電流策略之轉矩漣波 ... 86 圖 6.3-7: 綜合所有控制電流策略之切換次數比較圖 ... 88 圖 6.3-8: 綜合所有控制電流策略之效率圖 ... 90
符號表
e 即時感應電動勢(V) E𝐷𝑅 責任比造成的誤差表示(%) ENC𝑚𝑎𝑥 旋轉編碼器解析度 f𝑐 取樣頻率(Hz) f𝑠𝑝𝑒𝑒𝑑 速度迴路取樣頻率(Hz) i𝑑 參考電流值(A) i𝑟𝑚 實際電流值(A) I𝑗 第 j 相電流(A) I̅𝑗 第 j 相平均電流(A) J 轉動慣量(Kg.m sec2) K𝑎 角度誤差補償的增益 k𝑙 最大電感值與最小電感值得比例關係 L𝑎 定子與轉子對準(Aligned)或電感最大值(mH) L𝑢 定子與轉子沒有對準(Unaligned)或電感最小值(mH) N𝑠 定子極數 N𝑝ℎ 定子相數 N𝑟 轉子極數 P𝑎 即時氣隙功率(W) P𝑠𝑤,𝑙𝑜𝑠𝑠 功率開關之切換損失(W) P𝑐,𝑙𝑜𝑠𝑠 馬達線圈的銅損(W) p 磁極對數 q 功率開關使用量 q𝑏{∙} b 位元量化器 r(𝑘) 輸入電壓向量 R𝑠 每一相的電阻值(Ω) σ 平均電流的門檻值s 開關切換狀態 𝑆𝑐 相電壓矩陣 t𝑟 激磁電流上升的時間(s) t𝑓 去磁電流下降至零的時間(s) t𝑜𝑣𝑒𝑟𝑙𝑎𝑝 兩相電感重疊所佔據的時間(s) T𝑒 電磁轉矩(N-m) T̃𝑒 最大可到達的電磁轉矩(N-m) T𝑙 負載轉矩(N-m) T𝑟𝑒𝑓 參考轉矩(N-m) T𝑒𝑠𝑡 估測轉矩(N-m) T𝑚∗ 轉矩命令(N-m) U𝑗 j 相電壓 v̅ 平均電壓 v∗ 命令電壓 W𝑓 磁場能量(J) W𝑐 共能能量(J) ω𝑟 轉子角速度(rad/sec) ω𝑚 轉子機械轉速(rad/sec) ∆L 𝐿𝑎 − 𝐿𝑢(mH) Ψ 磁交鏈 Ψ𝑑 在轉子與定子交界處的磁交鏈(V-sec) Ψ𝑎 在轉子與定子對準時的磁交鏈(V-sec) Ψ𝑢 在轉子與定子未對準時的磁交鏈(V-sec) Ψ𝑐 最大磁交鏈(V-sec) Ψ𝑗𝑟 第 j 相線性增量式磁交鏈(在參考定電流情況下) Ψ𝑓 第 j 相線性減量式磁交鏈(去磁時間內)
β𝑠 定子極弧度(rad) β𝑟 轉子極弧度(rad) θ01 電流上升至參考值之間的角度差(rad) θ𝑟𝑚 一週期相電感的角度差(rad) θ𝑜𝑛 打開角度(rad) θ𝑜𝑣𝑒𝑟𝑙𝑎𝑝 兩相重疊之角度差(rad) θ𝑐 導通角或關閉角(rad) θ𝑜𝑓𝑓𝑜𝑝𝑡 最佳化導通(關閉)角(rad) θ𝑒 去磁所需的角度差(rad) θ𝑠𝑘 兩相打開角度之間的角度差(rad) θ𝑖 最大磁交鏈的一半之角度(rad) θ𝑟𝑝 轉子極間的角度差(rad) θ𝑠𝑝 定子極間的角度差(rad) θ𝑟𝑠 兩相相鄰電感/磁交鏈的角度位移(rad) ∆𝑖 電流遲滯帶寬(A) ∆I𝑗 第 j 相電流與平均電流的差(A) ∆𝑏 量化誤差 ∆θ01,𝑒𝑟𝑟 與理想提前角的角度差(rad) ∆θ𝑜𝑓𝑓,𝑒𝑟𝑟 與理想關閉角的角度差(rad) ∆𝐸𝑁𝐶 旋轉編碼器角度差 * 最佳化角度控制 ** 高效率角度控制
縮寫表
PWM 對稱式脈波寬度調變 (Symmetric Pulse Width Modulation)
PWM4k 4Khz 取樣頻率之對稱式脈波寬度調變 (Symmetric Pulse Width Modulation)
APWM 非對稱式脈波寬度調變 (Asymmetric Pulse Width Modulation)
FPWM 濾波器脈波寬度調變 (Filter Pulse Width Modulation) MRFPWM 多率濾波器脈波寬度調變 (Multi-rate Filter Pulse
Width Modulation)
OutP 傳出相 (Outgoing Phase) InP 傳入相 (Incoming Phase)
第一章 緒論
1.1 研究動機
隨著人類文明演進,馬達在我們的生活中扮演著重要的角色。從日常生活中 所使用到的電器用品包括洗衣機、電動刮鬍刀、果汁機等等,比較大功率馬達的 應用還有電梯設備、機床、還有現在還在研究發展的電動車或是油電混合車。馬 達的功率可以從最小幾毫瓦至最大幾千仟瓦的都有。在現今的社會,以傳統製造 業者追求的自動化效益,其中最關鍵的角色就是馬達;而根據 2010 年統計指出 終端用戶在全球消耗電力設備中,馬達約佔所有消耗電力的一半,如圖 1.1-1 所 示。又根據國際能源總署 (IEA) 統計,馬達是在工業用電中最大消耗的設備,佔 所有電力設備的六、七成,如果馬達效率能夠提升,對於工業用電的利益是有很 大的影響。現今社會大家都在談論節能減碳的問題,目的就是降低全世界的發電 量,有助於減少二氧化碳的排放量。而此研究即能有助於提倡節能減碳及減少二 氧化碳的排放量等問題。 馬達已有數百年的歷史了,至今已有非常多種類的馬達,依構造分類包括同 步馬達、感應馬達、步進馬達、伺服馬達、線性馬達等等。而傳統工業上使用的 直流馬達因其結構與特性關係已慢慢被淘汰,並將改用無刷交流馬達。效率對於 馬達來説是一個非常重要的指數,而目前能夠達到最高效率的馬達則是永磁同步 馬達,他的效率在額定轉速下可以高達 97%。因考慮稀土問題,永磁同步馬達在 未來可能價格會越來越高。如果未來電動車會崛起,這些必須使用稀土製成的馬 達,或許會慢慢減少使用;切換式磁阻馬達則不需要使用稀土材料,它的結構只 需要矽鋼片曡置而成,因此很可能會是取代永磁同步馬達的關鍵 [4]。常見的切換式磁阻馬達控制技術包括角度控制 (Angle control)、直接轉矩控 制 (Direct Torque Control, DTC)、即時直接轉矩控制 (Direct Instantaneous Torque Control, DITC) 等控制策略。理想控制切換式磁阻馬達只需要在特定的角度輸入 一個方波電流並能夠產生轉矩。實際上,因爲切換式磁阻馬達本身磁交鏈會達到 飽和的現象,所以造成控制上變得不是那麽理想,因此大部分的研究都必須基於 得到切換式磁阻馬達非線性轉矩、磁交鏈與電感在特定角度與電流值下的特性。 簡單來説,這些控制策略必須得到馬達的特性曲線才能有效的控制它,因此控制 上變得更複雜相對的開發成本也會提高。本論文考量簡化控制策略,選用最基本 的角度控制並加強其角度控制使得達到最佳化角度控制。此外,因考慮電流控制 誤差失真的問題,本論文提出一個具有良好的誤差補償調變器,目的是爲了改善 控制電流的品質與降低誤差,使馬達能夠更有效率地運轉。 圖 1.1-1: 全球終端電力消費 [5]
1.2 研究目標
本論文考慮到電流誤差失真與功率電晶體的頻繁切換次數所造成的損失,提 出了以多率濾波器脈波寬調變為一最佳化電流切換策略之理論基礎。本方法是利 用傳統非對稱脈波寬調變的概念,在載波上升緣與下降緣比較兩個不相同的訊號, 同時有效地利用濾波器使得三角波比較的參考訊號能夠受到虛擬回收訊號的調 整,這種機制可以改善由數位有限位元實現所產生的基頻諧波。由於本方法只有 一半的載波頻率,因此可以有效地讓功率電晶體的切換次數降低一倍,使得其功 率電晶體的溫度隨著降低,預期能夠達到損失減少的目標。本論文所提出之方法 在效率上比傳統脈波寬調變或是非對稱脈波寬調變來的高。 本論文所提出的方法不需要複雜的演算也沒有任何的查表,所以利用一般低 成本的微控制器就能夠實現。最後本論文將建立一個實驗平臺,包括了切換式磁 阻馬達、馬達驅動器、轉矩量測儀器與負載馬達並以不同的電流控制策略來控制 切換式磁阻馬達。在本實驗中,不同的轉速及頻率下個別比較其效率、功率電晶 體的切換次數與其表面溫度響應。最後,本論文會針對實驗結果進行分析與討論, 預期本方法能改善切換次數所造成的熱消耗,如此一來便能夠減少功率電晶體散 熱片的需求,即減少系統開發成本與體積並可提升整體效率與延長功率電晶體的 壽命。1.3 文獻回顧
本論文針對切換式磁阻馬達的研究進行探討及分析,大致上可分成三大類: 一、 硬體 i. 切換式磁阻馬達機構:包括馬達的相數、定子與轉子的極數。選擇 馬達極數的考量包括可靠度、價格、功率密度與效率等,是設計者必要考量的因素。由於切換式磁阻馬達的構造是沒有永久磁鐵的, 所以單相切換式磁阻馬達 [6, 7] 的驅動能力是機構設計上其中一個 探討的議題。此外,切換式磁阻馬達單相獨立激磁而具有非線性磁 化曲線,所以在機構上不好好設計可能會造成很大的轉矩漣波或是 噪音的產生。 ii. 控制驅動器:能夠驅動切換式磁阻馬達的驅動器有很多種類,不像 一 般 永 磁 同 步 馬 達 還 是 感 應 馬 達 都 是 使 用 多 相 電 壓 源 逆 流 器 (Inverter),所需的功率電晶體的需求是固定的。而切換式磁阻馬達 的驅動比較特別的是,它是獨立控制每一相的電流,而並非一般馬 達有中性點。切換式磁阻馬達最常見的驅動器就是非對稱變流器 (Asymmetric half bridge) [8, 9],其他包括單顆功率電晶體控制單相的 驅動器 [10]、共用一顆功率電晶體的米勒驅動器 [11, 12] 等其他相 關驅動器之比較 [13, 14] 不同驅動器的分類以及它們的動作原理。 二、 軟體 i. 切換式磁阻馬達之換相角:要控制馬達的第一步驟就是必須要有馬 達的電感對轉子角度的曲線,換相角對於切換式磁阻馬達是非常重 要的,這也是位置感測器對於切換式磁阻馬達的重要性。討論的項 目包括提前打開角、導通角、關閉角與兩相重疊角度的控制 [15]。 針對此研究方向包括效率最佳化,其估測輸入功率於不同轉速下調 整切換角度的控制演算 [16],或是線上控制調整換相角達到最佳化 效能控制 [17]。此外控制在高速上因爲反應電動勢極大,電流沒辦 法控制在預期設定值,所以其電流控制是單一脈波的控制 [18] 以達
ii. 激磁控制策略:此為較少人討論到電流控制策略,因現在大多數控 制馬達的控制器都是以控制電流的電壓源逆流器 (Voltage-source PWM converter) 為 主 。 其 控 制 方 法 有 遲 滯 電 流 控 制 (Hysteresis Current Control, HCC)、固定頻率脈波寬調變 (Fixed frequency PWM) [19]、非對稱脈波寬調變 (Asymmetri PWM) [20] 與濾波器脈波寬調 變 (Filter PWM) [21] 等等。這裡可以探討的有功率開關的切換損、 功率開關的表面溫度、電流追蹤的能力以及效率。 iii. 降低轉矩漣波與減少噪音:由於切換式磁阻馬達固有的結構問題, 在轉子旋轉時候會產生很大的噪音或是輸出轉矩漣波較大,這方面 的研究算是個值得探討的議題,壓抑轉矩漣波的方法包含了設計兩 相重疊分擔函數 (Torque Sharing Function, TSF) [15, 22]、注入諧波 電流的方法 (Harmonic current injection) [23] 與兩相激磁法的方法 有效的壓制噪音與轉矩漣波 [24, 25] 等等。 iv. 無感測:無感測在所有馬達上都是一個很大的研究方向。因爲馬達 工作環境的因素或是成本的考量,無感測能夠改善感測器造成的誤 差以及降低成本。針對切換式磁阻馬達的無感測方法包括量測電流 斜率 [26, 27]、狀態觀測器估測法、電流電壓估測磁交鏈方法、類神 經與模糊估測法等等。此外,也有學者研究針對在靜止或是低速的 無感測驅動方法 [28],或是在不同轉速區域使用不同換相位置估測 的方法 [29]。
三、 切換式磁阻馬達非線性特性曲線之量測
i. 有限元素法 (Finite element analysis):此方法需要瞭解馬達的幾何機 構、材料、邊界條件與電壓電流條件才能有效的分析馬達特性。 ii. 直接實驗量測法:較少人使用此方法,由於需要磁性感測器,因此 建立不容易且價格比較高。 iii. 漸接實驗量測法:較多人使用此方法,只需要輸入脈衝電壓或是一 個頻率的弦波電壓 [30] 將電壓與電流的資料利用馬達電壓方程式 計算出磁交鏈 [31, 32]。因爲切換式磁阻馬達的電壓方程式中電阻會 隨著溫度而變化的項目,所以有人提出一個錯誤補償校正電阻值的 方法 [33]。
1.4 本論文的貢獻
本論文針對兩個部分進行改善與分析,第一部分是針對切換式磁阻馬達的電 流控制策略,提出了以多率濾波器之脈波寬調變的方法產生控制電流訊號。本論 文成功地推導出可以低成本的微控器軟體實現此創新理論的方法,並以三相切換 式磁阻馬達為實驗對象驗證本方法,相較於傳統脈波寬度調變、非對稱脈波寬度 調變與濾波器脈波寬度調變,在同樣的速度誤差情況下具有較低之切換次數,這 使得系統減少切換損失以及功率電晶體之熱消耗,提升了控制效率以及增加驅動 級電路的可靠度與壽命。第二部分也是切換式磁阻馬達控制的重點,基於考量非 作功銅損的產生,對角度設計一些限制條件的控制,再利用角度補償的方法克服 實際非線性角度的誤差,並估測出精准的切換角度,本方法實現一個具有錯誤補1.5 論文架構
本論文以多率濾波器之脈波寬調變具體實現三相切換式磁阻馬達之控制為研 究主題,以 Renesas 32 位元系列晶片作為實驗平臺進行驗證及分析,並與不同 的電流控制策略進行效能評估與比較,其主要內容如下﹕ 第二章、切換式磁阻馬達介紹﹕概括介紹切換式磁阻馬達之種類、結構特性、數 學模型、以及其基本的控制元素。 第三章、切換式磁阻馬達控制策略﹕介紹磁阻馬達幾種核心的控制策略並詳細説 明其動作原理,説明最佳化角度控制策略與其優缺點。 第四章、多率濾波器之脈波寬調變﹕說明不同的電流控制策略與其原理,包括本 論文提出的多率濾波器之脈波寬調變的詳細説明與數學推導。 第五章、系統開發環境與架構﹕介紹硬體的架構、軟體控制架構與實驗環境,以 及說明如何實現不同控制策略和多率濾波器之脈波寬調變。 第六章、實驗結果分析﹕進行一系列的轉速實驗,記錄功率開關之切換次數、功 率開關之表面溫度以及效率,提出該調變技術之效能評估與比較。 第七章、結論﹕心得總結以及對本系統的未來展望。第二章 切換式磁阻馬達介紹
2.1 前言
現今工業使用上的馬達大多數是交流無刷馬達,它幾乎已經完全取代了直流 馬達,雖然直流馬達可以簡單地控制電壓大小來達到準確的控制轉速,並不需要 太多的控制元件或是複雜的控制策略,但是直流馬達仍然存在著一些結構上的問 題以及直流馬達無法達到較高的效率,主要是因為其電樞與轉子的磁場必須垂直 於 90 度的相位差,且必須靠著電刷連接電源至電樞才能使轉子轉動,產生碳刷 的摩擦損與污垢的囤積,使得直流馬達不適合在高溫、易燃的環境下工作。交流 無刷馬達可以改善直流馬達的缺點,但是在控制器與控制策略就比較複雜。 交流馬達種類繁多,工業上比較常見是感應馬達,感應馬達構造簡單且耐用, 價格上也比較低廉,但是其輸出扭力相較永磁同步馬達比較低,效率也比永磁同 步馬達來的低,感應馬達必須妥善的調整滑差才能使得轉子與定子旋轉磁場間良 好的相對運動。永磁同步馬達具有高功率密度、輸出大轉矩、效率高的優點,但 其缺點是磁鐵使用了稀土如釹與鏑,如果未來電動車都使用高效率的永磁同步馬 達,稀土的價格肯定會不斷提升,爲了保護環境且降低開發馬達成本,切換式磁 阻馬達或許是未來大量使用的馬達。切換式磁阻馬達結構簡單所以價格相較其他 交流馬達來的低,它沒有磁鐵,轉子也沒有線圈,主要的熱源在定子上。切換式 磁阻馬達目前面臨的問題就是它的轉矩漣波比較大、噪音也比較大與其效率比較 低。本章節會介紹切換式磁阻馬達以及它的基本動作原理,由最基本的理論推導 出馬達轉矩產生的表示,並介紹切換式磁阻馬達分別在線性與非線性能量的轉換 等。2.2 切換式磁阻馬達結構特性
切換式磁阻馬達的結構簡單,定子是由多層矽鋼片曡置而成的,轉子沒有磁 鐵,是利用導磁性較好的材料製成的。定子與轉子都是凸極結構,可稱之爲雙凸 結構,這使得在轉子旋轉上產生比較大的轉矩漣波。由於只有定子有線圈繞組, 所以主要熱來源都作用在定子上,而定子在馬達外圍所以散熱較佳。切換式磁阻 馬達靠著磁阻走最短路徑使馬達旋轉,此力稱爲磁阻力。切換式磁阻馬達在轉子 極數與定子極數必須妥善考量,否則馬達是沒有辦法驅動的,所以切換式磁阻馬 達在兩相以內時沒辦法自主啓動,必須靠著特殊的設計才能使得馬達旋轉,如圖 2.2-1 所示,為單向切換式磁阻馬達使用永久磁鐵來啓動且此永久磁鐵還必須有能 力克服負載。a
'
a
定子
轉子
磁鐵
m
圖 2.2-1: 單相切換式磁阻馬達利用永久磁鐵來啓動 一般在選用相數與定、轉子的極數上都有一定的規則才能使得馬達能夠正常 運轉與啓動,例如一般常見的三相切換式磁阻馬達在定子、轉子極數大多選用 (6/4 極)、(12/8 極)、(18/12 極) 或是更高極數的設計,四相切換式磁阻馬達在選擇定 子、轉子極數大多是 (8/6 極)、(16/12 極)、(24/18 極)。a
a
'
a
'
a
b
'
b
'
c
c
'
b
'
c
b
c
定子
轉子
a
a
'
a
'
a
b
'
b
'
c
c
'
b
'
c
b
c
定子
轉子
m
(a)
(b)
圖 2.2-2: 12/8 極切換式磁阻馬達之結構。(a) 定子 a 相與轉子對準 (b) 定子 a 相與轉子未對準 如圖 2.2-2 所示為一個三相 12/8 極數的切換式磁阻馬達。在考量設計極數時, 越高極數可以有效的降低轉矩漣波的產生,相對的成本會隨著極數而提高,通常 來説定子極數會比轉子極數高,或是可以利用簡單的方程式設計不同相數的極數 如式 (2-1) 和式 (2-2) 可以計算出在不同相數會有不同組合的定/轉子極數的選 用,簡單計算幾個較常見的相數與極數的設計歸類如表 2.2‑1 所示。 2 s ph N pN (2-1)
2 1 , , 0 2 1 , , 0 2 , 1 ph r s ph r r ph r s ph r ph p N N N for N N N p N N N for N N p for N (2-2) 表 2.2‑1: 比較常見的相數相對應定子/轉子極數的選用 定子相數 1 2 3 4 5 定子極數 2 4 4 8 6 12 18 8 16 10 202.3 切換式磁阻馬達的驅動器與角度定義
2.3.1
角度與電感的關係
切換式磁阻馬達之轉矩的產生與轉子角度和磁交鏈是電流的函數,因此轉子 角度對於控制上是非常重要的,而磁交鏈的關係跟電感值與電流有關係,所以推 導電感與轉子角度的關係式是必要的。圖 2.3-1 (a) 為考慮切換式磁阻馬達在單 一相一些重要角度的定義,圖 2.3-1 (b) 為兩相之間不同定義轉子角度對應電感 值的變化。 一個已知相數、定子極數與轉子極數的切換式磁阻馬達,就能夠確定一些基 本的角度,像是如圖 2.3-1 (b) 所示的 θ𝑟𝑝、θ𝑠𝑝 與 θ𝑟𝑠 分別是轉子極間弧度、 定子極間弧度與兩相相鄰定子的角度差,可表示如下式 (2-3) 至式 (2-5) 所示。 2 rp r N (2-3) 2 rp s N (2-4) 4 rs r s N N (2-5) 此外,較爲重要之角度轉折點的推導如式 (2-6) ~ (2-10) 所表示 [1] 對應圖 2.3-1 (b),進入轉子與定子的交界處 θ1、轉子進入完全對準定子且電感值最大的 角度 θ2 和 θ3、離開轉子與定子交界處 θ4 與轉子與定子呈現完全不對準 (Fully unaligned) 的角度 θ5。
1 1 2 rp s r (2-6) 2 1 s (2-7)
3 2 r s (2-8)4 3 s (2-9) 5 4 1 (2-10) 因此,必須瞭解馬達定子與轉子弧度才能藉由上面式子並計算出相對應的角 度,這些角度區間的意義可以表示成表 2.3‑1。 表 2.3‑1:轉子角度區間對應其意義 角度區間 電感值 意義 0 − 𝜃1 𝐿𝑢(𝑖) 1. 電感為最小值,定子與轉子完全沒有對準 (Fully unaligned) 的角度。 2. 此區域不提供任何轉矩。 θ1− θ2 dL(𝜃, 𝑖) dt 1. 轉子隨著旋轉逼近與定子完全對準,電感上升區。 2. 此區域供給電流能產生正轉矩 (Motoring) θ2− θ3 𝐿𝑎(𝑖) 1. 電感為最大值,定子與轉子完全對準 (Fully aligned) 的角度。 2. 此區域不提供任何轉矩。 θ3− θ4 −dL(𝜃, 𝑖) dt 1. 轉子隨角度增加而脫離與定子重疊,電感下降區。 2. 此區域一旦有電流加入會產生負轉矩 (Generator) θ4− θ5 𝐿𝑢(𝑖) 本區與 0 − 𝜃1 是一樣的
a
'
a
r
s
1
3 4
(a) m
aL
uL
電
感
rp
1
rs
2
3
4a
b
r
s
定子 定子 定子 定子 定子 轉子 轉子 轉子 轉子 轉子 (b) 圖 2.3-1: (a) 考慮幾個重要的轉子角度定義 (b) 轉子角度對應電感值得表示圖2.3.2
切換式磁阻馬達之控制器
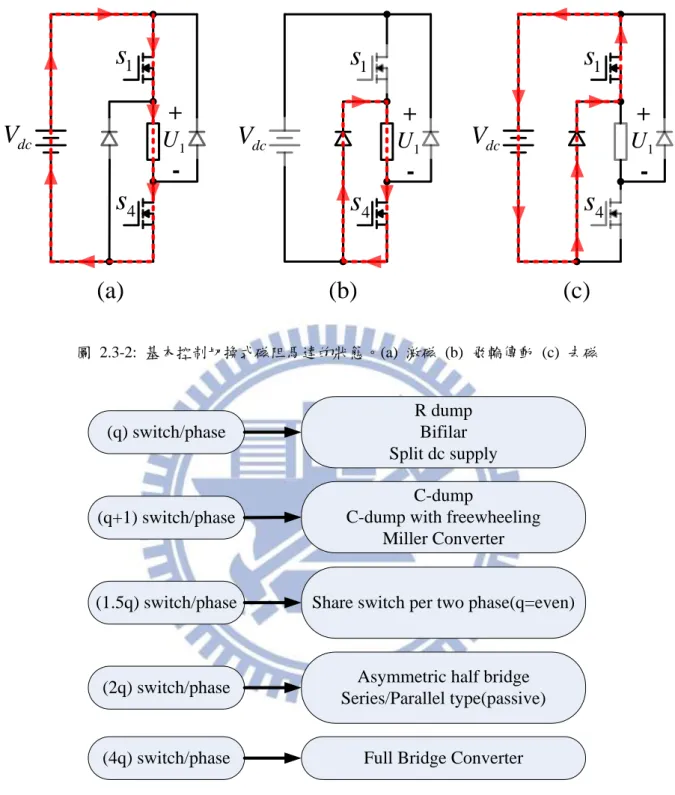
切換式磁阻馬達因其控制方式與一般三相無刷不相同,所以控制器是不能與 普遍的多相半橋電壓控制逆流器共用。控制切換式磁阻馬達的方式比較簡單,因 爲其每一相是必須獨立控制的,發展至今已有非常多樣化的控制器可以使用了。 如圖 2.3-3 所示,為利用功率電晶體的數量與相數來分類 [1, 14]。較爲常見的控 制器是非對稱半橋變頻器 (Asymmetric half bridge inverter),此控制器與普遍使用 的逆流器的差別在於每一相多出兩個功率飛輪二極體。因爲控制切換式磁阻馬達 線圈繞組的電壓為單極性,由 Miller 在 1990 年推出上橋共用一個功率電晶體 的控制器,目的是為了減少功率電晶體的使用數量,但是此控制器在控制去磁時 會拉長電感電流的放電時間,因爲其無法各自獨立控制飛輪傳動的狀態。 對於控制切換式磁阻馬達定子線圈主要有三個狀態控制,如 圖 2.3-2所示,分別是激磁、飛輪傳動和去磁。在理想上,激磁主要能夠使得 線圈繞組得到能量;飛輪傳動則是將能量保持住;去磁是讓能量傳回直流鏈電源 供應器。接下來會針對幾個普遍控制切換式磁阻馬達的控制器。 dc
V
1s
+
-(a)
(b)
(c)
4s
1U
V
dc 1s
+
-4
s
1U
V
dc 1s
+
-4
s
1U
圖 2.3-2: 基本控制切換式磁阻馬達的狀態。(a) 激磁 (b) 飛輪傳動 (c) 去磁 (q) switch/phase (q+1) switch/phase (1.5q) switch/phase (2q) switch/phase (4q) switch/phase R dump Bifilar Split dc supply C-dump
C-dump with freewheeling Miller Converter
Share switch per two phase(q=even)
Asymmetric half bridge Series/Parallel type(passive)
Full Bridge Converter
圖 2.3-3: 依相數與開關數分類切換式磁阻馬達控制器
2.3.2.1
(q+1) 開關米勒控制器
這種控制器只需要每一相數、一個開關以及一個共用的開關,如圖 2.3-4 所 示。相較非對稱半橋變頻器節省掉 (q-1) 開關使用量,並可降低功率電晶體所造 dcV
1s
+
-(a)
(b)
(c)
4s
1U
V
dc 1s
+
-4
s
1U
V
dc 1s
+
-4
s
1U
成的損失。以單相看來,三個控制狀態都能達成並與非對稱半橋變頻器一樣。爲 了 減 少 轉 矩 漣 波 , 兩 相 之 間 重 疊 部 分 必 須 靠 轉 矩 分 擔 函 數 (Torque sharing function) 來調試,所以兩相同時導通是必須的,而這種共用上橋一個開關的控制 器對於兩相同時控制是沒辦法妥善控制的。如圖 2.3-5 所示可以看出 𝑖𝑎 與 𝑖𝑏 在去磁的時候的電流會被拖延導通時間,嚴重的話會使得產生負轉矩 (紅色區域)。 所以對於此控制器在控制上的彈性變得比較低。 dc
V
0
s
2
s
s
3
c
V
bV
a
V
+
-+
-+
-1
s
C
圖 2.3-4: 三相米勒控制器* , a a i i dc V dc V 0
s
1s
2s
* , b b i i m
L a L u L 1 a V 2i 1 1 2i m
m
m
m
m
m
圖 2.3-5: 米勒控制器在兩相重疊同時導通時兩相電流的變化2.3.2.2
2q 開關非對稱半橋變頻器
目前控制切換式磁阻馬達最廣泛使用的變頻器為非對稱半橋變頻器,它能夠 獨立控制每一相的三個狀態。以下針對硬切換策略與柔切換策略進行討論與説明。 由圖 2.3-6 所示,為兩個切換策略之電流的變化與上/下臂開關的切換狀態,∆i 為 磁滯控制器之電流的誤差範圍的定義。以硬切換 (Hard switching) 策略而言,只 有用到兩個狀態包括激磁與去磁,動作原理就是當電流誤差低於 −∆i 時,𝑆1 與 𝑆4 同時打開使得相電壓等於輸入電壓源;當電流誤差高於 ∆i 時,𝑆1 與 𝑆4 同 時關閉使得相電壓等於負的電壓源,在切換過程中能量是在電壓源端與馬達端不停的交換造成電壓源之直流鏈電容器產生更多的漣波,使得直流鏈電容器壽命縮 短且增加功率開關的切換損失,因此這種切換策略普遍上比較少人使用;另外一 種切換策略叫做柔切換 (Soft switching),它三個狀態都有使用,不同的地方是當 電流誤差高於 ∆i 時,𝑆4 會關閉使電流連續透過 𝑆1 至相線圈透過飛輪二極體回 去,進入飛輪傳動模式,這種切換策略能夠有效地減少切換頻率並降低功率開關 的切換損。兩者切換策略在去磁方面都是讓 𝑆1 與 𝑆4 同時關閉,這樣可以讓電 流以最快的方式降至零。 dc
V
1s
a V + -4s
m L a L u L d i 1 dc V dc V 1,4 s s 2i L 1 1 s a V (a) (b) (c) m a L u L d i 1 dc V dc V a V 2i m m m m m m 圖 2.3-6: 非對稱半橋變頻器。(a) 單相示意圖 (b) 硬切換策略 (c) 柔切換策略2.4 切換式磁阻馬達數學模型
切換式磁阻馬達的系統可以由電機學模型的觀念説明,圖 2.4-1 為切換式磁 阻馬達系統的概念圖主要分三個分支,首先由電器的角度利用電壓與電流描述電 器系統,其中必須具備歐姆定律、克希荷夫點壓定律 (KVL) 與克希荷夫電流定 律 (KCL); 第二分支為磁性系統介於電器與機械之間扮演著能量轉換的角色, 它是利用馬克士威方程式 (Maxwell’s equation) 來描述磁交鏈、磁通密度與電場 強度;而最後一部分則是機械系統主要是利用牛頓定律 (Newton’s law) 來表示馬 達輸出轉矩/力還有位置、轉速、加速度等。它們之間是有個轉換的表示,比如説 電路與磁交鏈借由電流產生轉矩/力使得機械旋轉。馬達因旋轉而產生感應電動勢, 旋轉的速度以及激磁電流的不同會使得磁交鏈的變化有所差異。 三相切換式磁阻馬達之繞組與其他三相無刷馬達不同,一般三相無刷馬達繞 組方式可分成 Y 接或是 Δ 接,但是三相切換式磁阻馬達的每一相線圈繞組都是 獨立的,其沒有中性點,也就是幾乎沒有互感,因此,可以由簡單的電壓方程式 推導馬達的特性。以下將介紹由馬達等效電路的電壓方程式的觀點推導其動態轉 矩力的產生。 磁阻馬達系統 磁性系統 機械系統 電器系統 磁交鏈 位置與轉速 力/轉矩方程式 (牛頓定律) 電壓與電流 等效電路路方程式 (KVL & KCL) 圖 2.4-1: 切換式磁阻馬達模型概念圖2.4.1
切換式磁阻馬達等效電路
切換式磁阻馬達忽略微小的互感,其單相的等效電路如圖 2.4-2 所示,給與 的輸入電壓可以是電阻的電壓降與磁交鏈的總合:
, s d i v R i dt (2-11) 磁交鏈可以寫成對應其角度與電流之電感值與瞬時電流值的乘積:
, L i i (2-12) 由式 (2-11) 可以被拆解得到下式:
, , , s s m d i v R i dt dL i di R i L i i dt d (2-13) 式 (2-13) 中右手邊共三項分別代表電阻電壓降、電感電壓降以及感應電動勢, 所以感應電動勢可以寫成式 (2-14)。式中的 dL/dθ 幾乎不會變,只會受到電流 變化的影響,可以將上式 (2-13) 表示成切換式磁阻馬達的等效電路如圖 2.4-2 所示。式 (2-13) 的最後一項為馬達的反電動勢如下所示
, m dL i e i d (2-14) 其中,時間常數可以由轉速與角度表示成下式: m m d t dt (2-15)s
R
L
i
e
v
圖 2.4-2: 單相切換式磁阻馬達等效電路圖 由電壓方程式乘上電流可以得到瞬時輸入功率如下式,其中右手邊分別為阻抗損 失、場共能 (Field co-energy)、以及氣隙功率。
2
2 1 , 1 2 , 2 2 a s p vi d L i i dL i R i i dt dt (2-16) 由氣隙功率將轉矩與轉速的乘積可以得出馬達的電磁轉矩:
2 2 2 , 1 2 , 1 2 , 1 2 a e m m e dL i d p i d dt dL i T i d dL i T i d (2-17) 因此,由等效電路方程式即可求出切換式磁阻馬達在動態與穩態的電磁轉矩、氣 隙功率與馬達的輸入功率。由於電磁轉矩會隨著電流與角度的差異有所變動,所 以其馬達的動態方程式可以表示成:
,
m e m l d J T i T dt (2-18)2.4.2
切換式磁阻馬達轉矩產生與能量轉換原理
能量的轉換可分線性或是非線性,從電流與磁交鏈的角度來推導出能量的轉 換與轉矩的方程式 [1 ~ 3]。實際上,切換式磁阻馬達的磁交鏈是非線性的因此在 能量的轉換就比線性來的佳。在第 2.3 節已知角度、電流與電感值的關係,以下 就來探討角度、電流對磁交鏈的關係與變化。 首先,討論由線性的角度來分析能量轉換如圖 2.4-3 (a) 所示。位置 A 為定 子與轉子完全對準的角度,U 為定子與轉子完全不對准的角度。在磁交鏈不飽和 的情況下,可以知道磁性能量儲存在 A 點最大因爲它的電感值與電流最大。磁性 儲存能量為式 (2-19),此能量最後會傳回電源輸入端。 2 1 2 a ROAB L i (2-19) 轉子在完全沒對準至轉子與定子的交界處沿著 OU 的路徑,由於電感電流 會有上升時間,所以電流上升至 𝑖𝑚 的時間大於零沿著 OU 的路徑,此能量為: 2 1 2 u m OUC L i (2-20) 轉子從未對準至完全對準沿著 UA 的能量轉換為: 2 2 1 1 2 2 e m m dL W OUA T i i L d (2-21) 其中, 2 1 JA a u L L L 沿著 UA 路徑因爲 dL/dt 不等於 0,所以這裡會有反應電動勢承擔能量表示的O
U
R
W
mi
a
u
A
B
C
cW
fW
(a) (b)O
a
u
mi
圖 2.4-3: 能量轉換示意圖。(a) 線性 (b) 非線性在一個能量轉換中,總能量供給區域為 OUABO 其中就是 OUC 與 ABCU 的 總合,可以表示成: 2 1 2 2 m u m S W R OUABO ABCU OUC i L L i (2-23) 而線性能量轉換的比例公式可以被定義成: 1 Energy Conversion W W
Total Energy Supply S W R 2 1
l l k k (2-24) a l u L k L (2-25) 由線性能量轉換的觀點或對於這種不飽和的馬達來説,只有少於總能量 S 的一半的能量被轉換成機械能量。OUC 區域是不會提供轉矩的,此區域為使電 流上升至 𝑖𝑚 的路徑,借由式 (2-25) 中 𝑘𝑙 的比例,一般都高於 4,可以得知能 量的轉換一定小於一半。也就是說在這種不飽和的切換式磁阻馬達輸入 10 焦耳 的能量,實際上機械工作只有 5 焦耳或以下,對於功率元件的使用率是非常糟 糕的。
切換式磁阻馬達忽略飽和現象,早在 1979 年由 Ray and Davis 以線性的方 式分析並推導出完美且簡潔的方程式 [34]。實際上,考慮飽和現象的話,能量的 轉換一定能夠超過總輸入功率的一半,以下就要開始討論非線性磁交鏈的推導方 程式。 非線性的能量轉換可以表示如圖 2.4-3(b) 所示,分別是場儲能 (Field energy, f W ) 與共能 (Co-energy, W ) 可以分別表示成式 (2-26) 和式 (2-27) 積分的形c 式,其中 Ψ0 = 0。比較圖 2.4-3 (a, b) 兩者,在磁化不飽和且磁化曲線是線性的 馬達其場儲能等於共能,若是飽和的磁化曲線其共能會大於場儲能,使得能量的 使用率比較高。 0 a f W id
(2-26) 0 m i c W
di (2-27)B
mW
A
D
C
O
a
u
mi
圖 2.4-4: 推導非線性電磁轉矩示意圖推導電磁轉矩可以由機械能量的微分表示如圖 2.4-4,從 A 點至 B 點且定 電流的情況,而總能量為: e d W eidt i dt id ABCD dt
(2-28) 場儲能的微小變化可以表示成, f W OBC OAD (2-29) 藉由式 (2-28) 與式 (2-29) 可以得到機械工作的能量區域為 OAB,如下表示:
m e f W W WABCD OBC OAD
OABCD OBC OAB (2-30) 式 (2-30) 相等於轉矩與 AB 角度差 ∆θ 的乘積,給予限制當 ∆θ → 0 時, 電磁轉矩就可以表示成式 (2-31) 。如圖 2.4-5 所示為利用能量流通的方式加以 表示切換式磁阻馬達對能量的轉換過程。 tan c e i cons t W T (2-31)
總
輸
入
能
量
磁阻馬達
場儲能
W
fT
e
T
e
. f m i constW
. m f constW
i
圖 2.4-5: 切換式磁阻馬達之能量流通示意圖第三章 切換式磁阻馬達控制策略
3.1 前言
切換式磁阻馬達的控制方法與其他的馬達比較不一樣,控制永磁同步馬達或 是一般三相無刷馬達可以用磁場導向控制 (Field-Oriented Control, FOC),利用坐 標轉換的方式可以將電磁轉矩與磁通量分離獨立控制,並且能夠產生一個連續的 轉矩,而切換式磁阻馬達因其結構為雙凸極且每相獨立,使得切換式磁阻馬達產 生一個串聯式的轉矩 (Cascade torque generate);也就是說每一相線圈都會在特定 角度產生不連續的轉矩,一旦兩相之間重疊的部分控制不當便會產生劇烈的轉矩 漣波。第二章提到切換式磁阻馬達的非線性磁交鏈分佈,控制好切換式磁阻馬達 的其中一個因素就是了解馬達的特性,所以量測切換式磁阻馬達特性也變得相當 重要。第二章提到角度對於馬達的特性也是息息相關,因此取得絕對的轉子位置 資訊是控制切換式磁阻馬達的必備元素。然而相較於其他馬達,由於切換式磁阻 馬達具有雙凸的特性所以適合運用於無感測控制。本章節將會介紹切換式磁阻馬 達的控制策略,可分成兩大類。第一類是查表的控制方法,必須要有轉矩、角度、 電流或磁交鏈的資料儲存,以建立三維查表的方式來作直接轉矩控制 (Direct Torque Control, DTC) , 或 是 即 時 直 接 轉 矩 控 制 (Direct Instantaneous Torque Control, DITC);另外一類就是單純的角度控制,爲了簡化控制方法與運算量,利 用最佳化角度與電流的資訊直接控制馬達,此方法可在比較低階的微控制器實 現。
3.2 轉矩控制
產生轉矩漣波的主要因素分兩個區段,第一是兩相之間換相的間隔與控制策略, 必須有效的利用轉矩重疊分擔控制 (Torque Sharing Function, TSF) 來降低轉矩漣 波;第二是單一相提供定轉距的控制策略,也就是電流控制策略,而激磁電流的 控制策略將會在第四章中討論。
3.2.1 即時直接轉矩控制
電流控制策略 HCC/PWM 閘極切換表 控制器驅動 磁阻馬達 回授訊號 電流,角度 轉矩估測 (轉矩-電流-角度) 3維查表 ref T est T err T * m I , msr m I m
0 1
圖 3.2-1: 即時直接轉矩控制迴授方塊圖 直接轉矩控制與即時直接轉矩控制的策略差異在於即時直接轉矩控制策略需 要估測即時轉矩如圖 3.2-1 所示,即時轉矩的估測是透過回授三相電流與角度資 訊以及三維轉矩─電流─角度透過查表的方式取得。依轉距誤差為式 (3-1) 所示, 可以透過遲滯電流控制 (Hysteresis Current Control, HCC) 或是脈波寬度調變器 配合轉子角度的資訊來控制參考電流。err ref est
T T T (3-1) m
磁
滯
控
制
函
數 1
0 k off
k on
k 1 off
k 1 on
區間1 區間2 區間3切換式磁阻馬達的控制狀態大致上分為三個,分別是激磁、飛輪傳動與去磁 可以表示成 [−1 0 1]。遲滯控制器判斷區三個門檻值 ∆E、0 與 −∆E 且作用 在兩相重疊相電感區間,其可分成三個區間如圖 3.2-2 所示。這些門檻值在不同 的區間的控制狀態可以表示成:
i. 區間 1:第 k 相函數為進入相 (Incoming phase),此時電流必須迅速 建立,而出去相 (Outgoing phase) 的電流必須控制在 2∆E 之間,以下 式子為此區間函數的定義。 1 1 1 0 0 1 k T err k T err err f T E f T T E (3-2) ii. 區間 2:只有第 k 相函數會有變化,其必須完全掌控轉矩誤差。 1 0 0 1 err k T err err T E f T T E (3-3)
iii. 區間 3:與區間 1 相反,第 k 相函數為 Outgoing phase,因此其電 流必須迅速降至零,以下式子為此區間函數的定義。 1 0 1 0 0 1 k T err k T err err f T E f T T E (3-4) DITC 在控制電流方面採用遲滯控制,因此切換頻率不固定,但取樣頻率固 定,故當轉速提高的時候轉矩連波也會提高 [24]。增加取樣頻率可降低轉矩連波,
3.2.2 轉矩分擔控制
基於 Husain 於 1996 年提出轉矩分擔控制 [22],可降低在兩相之間轉矩漣 波的產生,以下為單相弦波轉矩分擔的函數表示:
0 0 1 1 2 1 2 2 3 0.5 1 cos , 1, 0.5 1 cos 0, k f k otherwise (3-5) 另外,總轉矩是參考轉矩與轉矩分擔函數的乘積如 (3-6) 式所示,而所有相 的轉矩分擔函數的總合必須等於 1。此方法在兩相重疊控制上可以得到定轉矩輸 出並有效的降低轉矩連波。
total ref T T T f (3-6)
1 1 n T k k f f
(3-7) 轉矩分擔控制 (轉矩-電流-角度) 3維查表 * r
m
0 1
電流控制策略 PWM 閘極切換表 控制器驅動 磁阻馬達 回授訊號 電流,角度 * m I msr I est
Ed
* m T
G s 圖 3.2-3: 轉矩分擔控制函數之控制方塊圖 由圖 3.2-3 所示為基本的轉矩分擔控制圖,其回授並不用估測實際轉矩,屬 於速度控制的架構。從圖中可以看出,轉矩分擔函數的控制必須透過三維查表 (轉 矩─角度─電流) 的方式得到該轉矩與角度所對應的電流值。1
0 m
k off
k on
k 1 off
k 1 on
1
(a)
(b)
k T f 1 k T f k 1 T f Tf
Tf
k T f 1 k T f k 1 T f k off
k on
k 1 off
k 1 on
m
圖 3.2-4: (a) 線性轉矩分擔函數 (b) 弦波轉矩分擔函數 比較普遍使用的轉矩分擔函數可以表示成線性的函數如式 (3-8) 所示,但是 切換式磁阻馬達之非線性的特性是線性函數無法補償的,因此提出了弦波的函數 如式 (3-9) 所示會較為接近實際切換式磁阻馬達的特性,不過仍然無法完全符合 其最佳的轉矩分擔控制。由 [15] 提出非線性邏輯的轉矩分擔控制函數,此函數 利用一些判斷式就能夠達到轉矩分擔的效果且相較其他的函數,此函數更有效地 控制重疊的部分。 , k k rs on T linear overlap f (3-8) k 1 1 k k T T f f (3-10) 1 0 k T f (3-11) 電流控制策略 (轉矩-電流) 2維查表 閘極切換表 控制器驅動 磁阻馬達 回授訊號 電流,角度 轉矩估測 (轉矩-電流-角度) 3維查表 轉矩分擔 控制 ref T est T * m T m Imsr 0 1 , msr m I * m I 圖 3.2-5: 直接轉矩控制結合轉矩分擔控制方塊圖 基於 [15] 的控制方法,如圖 3.2-5 所示,可看出其是即時直接轉矩控制的 架構,與即時直接轉矩控制的差異為圖中陰影的部分,將轉矩分擔函數加入其控 制方塊圖中並將電流控制策略改爲二維 (轉矩─電流) 查表。總參考轉矩為兩相 重疊個別的參考轉矩相加,如式 (3-9) 所示,如橢圓的基本函數。 * * * 1 * 2 * 2 1 2 2 m m k m k m k m k T T T I I a b (3-12) 其中,
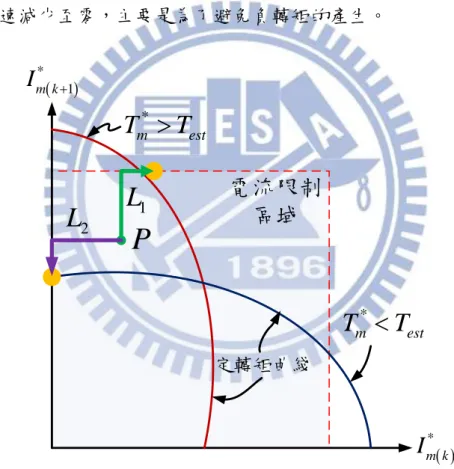
2 2 1 2 , 2 , rm rm k rm rm k a L i b L i 之前所提到的線性函數或是弦波函數都是固定的轉矩分擔函數,因此沒辦法 考慮到馬達磁飽和的現象,而此轉矩分擔函數利用兩相重疊之間有效的控制兩相 重疊的激磁電流,由於 Outgoing phase 的電感會遠大於 Incoming phase 的電感 值,所以必須調整 Incoming phase 的電流使得達到設定之轉矩。圖 3.2-6 主要 表示 在兩個不同的定 轉 矩曲 線 Outgoing phase 電 流 以 及 Incoming phase 電流的軌跡路線。當參考轉矩小於實際估測轉矩時,P 點走 L1 路 徑到達定轉矩曲線,固定 Outgoing phase 電流 𝐼𝑚(𝑘)∗ 以增加 Incoming phase 電流
𝐼𝑚(𝑘+1)∗ 爲主,若是超過電流限制區域則調整 Outgoing phase 電流,這是因爲在轉
速高時電流的建立必須克服反應電動勢,所以 Incoming phase 的電流必須快速的 建立;相反地,當參考轉矩大於實際估測轉矩時,P 點走 L2 路徑到達定轉矩曲
線,固定 Incoming phase 電流 𝐼𝑚(𝑘+1)∗ 以減小 Outgoing phase 電流 𝐼𝑚(𝑘)∗ 爲主, 若是超過電流限制區域 (小於零) 則調整 Outgoing phase 電流,Outgoing phase 的 電流必須快速減少至零,主要是為了避免負轉矩的產生。 * m k
I
* 1 m kI
電流限制
區域
定轉矩曲綫P
1L
2L
* m estT
T
* m estT
T
圖 3.2-6: 兩相重疊在不同參考轉矩與實際轉矩下電流軌跡的示意圖 由於 DTC、DITC 與 TSF 都必須擁有龐大的記憶體來儲存一些三維查表的 矩陣,所以必須採用更好的控制晶片,而造成成本提高以及增加控制的複雜度。3.3 最佳切換角度控制
第 3.2 節説明了直接轉矩控制策略的動作原理,如果要用其控制策略就必須 先量測該目標馬達的特性,其中包括轉矩、磁交鏈對電流與角度的變化以及建立 矩陣查表。爲了簡化這些複雜的控制,本章節將介紹如何以不查表的方式來做最 佳化角度的控制並以數學推導的方式説明其意義。3.3.1 提前導通角控制
由於電感性負載的激磁存在著一個時間常數並非理想垂直上升,爲了達到單 一相在上升電感區能夠提供定轉矩的能力,提前導通角是必須的,提前導通角也 是爲了避免克服反應電動勢的需要,因爲在沒有反應電動勢的情況下導通能夠讓 電流上升比較快,由式 (2-12) 電壓方程式且忽略阻抗電壓降推導得,
01 , u r dc adv d u r dc di i d L i V L d dt i L V (3-13) 其中,adv 01 1 on ,此角度為電流上升至設定電流值之角度差,它主要與 轉速以及負載所需的激磁電流有關。 on off q m L a L u L I 1 23 4 rp d i 電 感 電 流 m 圖 3.3-1: 單一相激磁電流的示意圖3.3.2 最佳導通角推導
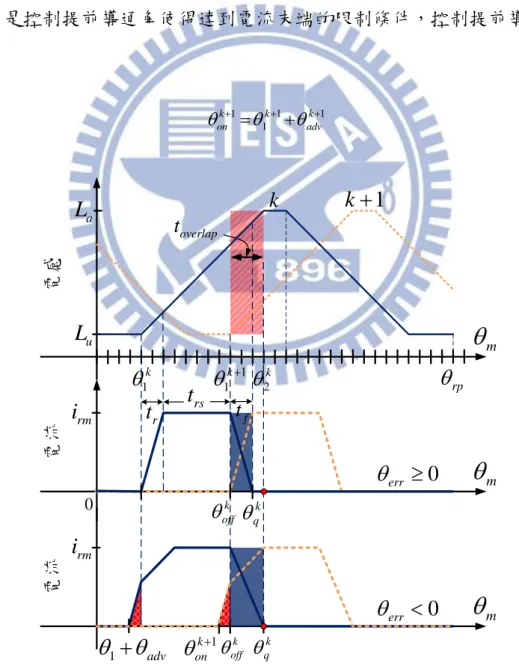
最佳導通角也就是關閉的角度與打開的角度之間的角度差,控制關閉角度比 控制打開角度來得重要,因爲關閉角度牽扯到兩相之間重疊的部分。根據 [17], 此推導基於兩個條件推導最佳化導通角,首先,兩相重疊磁交鏈的區域只考慮正 轉矩的產生;其次就是兩相磁交鏈交界處是最大磁交鏈的一半如式 (3-21) 表 示。 由圖 3.3-2 所示,磁交鏈分兩段式上升分別為快速建立足夠的電流區 𝜃01 與定電流區 𝜃𝑐− 𝜃1。電流由零至最大電流值時,此時因爲電感量不變且最小, 因此磁交鏈的表示為式 (3-14),而最大磁交鏈於 𝜃𝑐 可以表示成式 (3-15),此時 𝛹𝑐 與 𝛹𝑑 可以表示成兩個角度的比例關係如式 (3-16) 所示。 d L iu d (3-14) dc e c r V (3-15) 01 c e d (3-16) 定電流區,假設磁交鏈線性上升,可以推導出磁交鏈在此區域的方程式如式 (3-17) 所示,而下一相磁交鏈只需要加入兩相之間的角度差如式 (3-18) 所示。
1
1 k c d k r k k d off (3-17)
1 1 1 1 1 1 k c d k r k k sk d off (3-18) 在去磁區段中給予所有直流鏈的負電壓,電流會由 id 降至零,此時的角度差m a L u L 電 感 電 流 rp k on d i k off 1 k k q i 磁 交 鏈 c d k r k 1 r k f 1 k f m m 圖 3.3-2: 考慮磁交鏈在兩相重疊的情況 已知在去磁的區段的角度差 (3-19) 式,且假設此區段之磁交鏈線性減少, 1 k off k f c e (3-20) 1 2 k k c f f (3-21) 而兩相磁交鏈交界處是最大磁交鏈的一半,所以在交界處的角度 𝜃𝑖 的磁交鏈相 等,由式 (3-21) 代入式 (3-20) 可以得到交界處 𝜃𝑖 的角度為: 2 k e i off (3-22) 接下來,將式 (3-16)、式 (3-20) 和式 (3-21) 代入式 (3-18),可以推導出最佳的 導通 (關閉) 角度,