衛星雷達影像應用於地表水文特性之研究
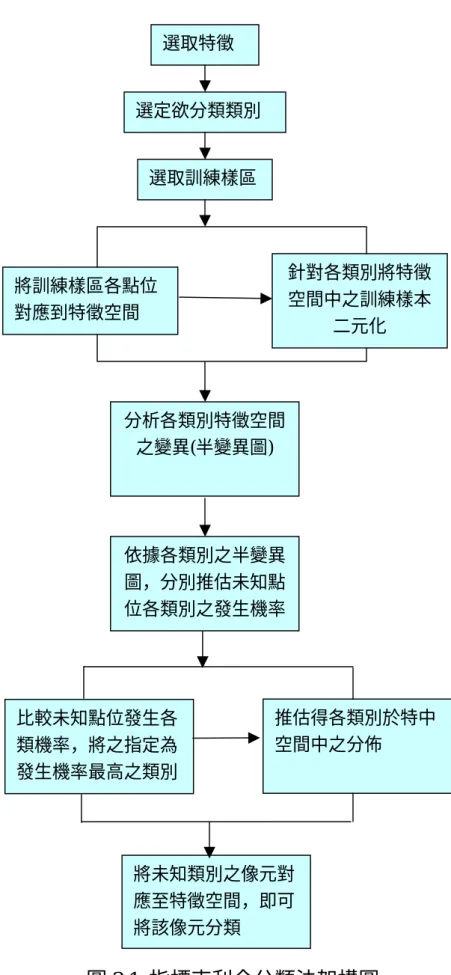
期末報告 一、前言 台灣地區於夏季颱風期間時常因大量暴雨造成洪澇災害,危及人 民生命財產安全,也造成農作物大量損失,故洪水之控制與管理實刻 不容緩。然而防洪設計及水患發生後,淹水範圍之鑑定都是洪水控制 與管理重要課題。其中淹水範圍之劃定不但需要大量人力資源而且耗 時,且其準確度及認定標準亦為不易克服之處;若是在洪水發生當 時,同時進行大面積的調查更是非常困難。 以往由於高品質之影像取得不易,尤其於天候不佳的颱風天更難 有影像資料,在此微波(SAR)感測器由於具有全天候偵測及高穿透 力的優點,已成為一不可或缺的遙測工具,這些先進的遙測儀器都提 供我們在環境的監測時有更高品質的資訊與影像,並大幅提昇了遙測 技術應用的範圍,本研究主要在利用主動式的衛星雷達影像(Radarsat) 來判識洪水事件之淹水區域。 自 1994 年 Petrie 嘗試將遙測技術應用於洪水之監測管理,有了 初步的結果。其他如,Thorley, N 等(1997)以實例說明了衛星遙測 在洪水管理的功效,尤其是在洪水監測跟衝擊兩方面的應用。由於衛 星資料可以提供即時的地理資訊,進而確認在正常時和洪水時的水體 淹沒範圍。透過地理資訊系統(GIS)結合其他外來資料和歷史資料 可以提供防洪決策時有用的資訊。Kim(1999)用日本的衛星 JERS-1 L/HH 偏極,其地面解析度為 18mx18m 應用融合技術和變遷偵測方法 來分析影像。在此研究中以最大概似法分類完再結合各類 NDVI 與 DEM 資料分析發現 97.83% 的洪水危險區高程在 100m 之下。Horritt, M.S.等人(2001)以洪水前後三幅 ERS1 SAR 影像採用 Active contour models(snakes)法應用南部地區的 Thames 河的兩段,畫出淹水範圍的 邊緣線,他並收集當時航空照片以人工由航照圖判識淹水範圍當為真 值,評估得 snakes 法之正確率為 75%;其中主要誤差原因-未淹水之植生回波與水體類似。 此外在我國中央通訊系統研究中心(2001)亦購買加拿大衛星資 料,目的在於衛星雷達監測機制建立及衛星雷達資訊處理系統建置, 並以淹水前後影像用簡單的差值 Z2-Z1 或比值 Z2/Z1 來判斷淹水,以 建立衛星雷達水災資料通報機制;雖然此法評估淹水範圍不甚理想, 且在台灣地區要做到即時監測實屬不易,但由此可見我國已開始對於 將衛星資料應用於環境監測有所認識, 二、分類方法 由衛星影像判識淹水範圍之方法計有分類、變遷偵測、及邊界搜 尋等方法。本研究第一年之主要研究擬將衛星影像進行分類後,進而 判斷出淹水之範圍。而分類之問題即在,如何切割特徵空間;傳統最 大概似法或貝氏分類法皆須假設各類別在特徵空間中之分佈為多變 量常態分佈,然而在實際情況中,其分佈不見得呈常態分佈,而我們 通常也不知道各類別在特徵空間中的分佈。因此本研究嘗試研擬新的 分 類 方 法 以 解 決 此 問 題 , 由 於 指 標 克 利 金 推 估 為 一 無 母 數 (non-parametric)的方法,所以本研究引進地理統計學中之指標克利 金之概念,以 0、1 二元的表示方法來表示某一像元是否歸屬於某一 類,若該像元屬於該類則指標數值為 1,亦即此點發生該類的機率為 100%;不屬於該類則其指標數值為 0,即此點發生該類的機率為 0%; 並藉由一般克利金法(ordinary kriging)推估未知點發生該類的機率, 藉著探討各類發生之機率即可達到分類的目的。 除了必要之水文、地文資料及歷史颱洪事件淹水範圍等資料之蒐 集外,本年度計畫主要在建立以地理統計之指標克利金法為基礎之無 母數的分類方法,而此方法目前已建立完成,其分類程序大致如圖 1.流程所示。由於雷達影像資料只有單一維度,故先以 SPOT 影像資 料測試本分類方法。 選取之影像範圍包括 350X500 像元,參考農林航測所 1999 年
11 月 18 日拍攝之 1/5000 相片基本圖選取訓練樣區,並赴現場踏勘校 驗,均勻的在整幅影像上選取若干水體、建地、林地、農地、裸露地 等五類,並在其上均勻選取訓練樣本與驗證資料,共 2618 個像元, 且兩者不重複,其中訓練樣本含 1886 個像元,驗證樣本含 732 個像 元。 圖 2.2 為訓練樣本對應到紅外光段(IR)與紅光段(R)所建構的特徵 空間之各類分佈,在此特徵空間中大部分的點位仍屬未知(黑色部 分),而經過兩種分類方法推估得各類別在二維特徵空間之分佈分別 如圖 2.3(a)與圖 2.3 (b)所示。由此圖可以發現因為最大概似法假設各 類別為常態分佈,所以它所推估出的特徵空間分佈各類別的邊界比較 規整(如圖 2.3(a)),由於二維時最大概似法假設各類為二變數常態分 佈,故在二維時其邊界為二次曲線;而指標克利金法之推估可依訓練 樣本空間分佈結構推估得到未知點位應屬類別,故可以在特徵空間 中,畫出各類別之不規則邊界(如圖 2.3(b)),此邊界應當較符合實 際之狀況;由推估出之二維特徵空間各類分佈圖可以更具體瞭解指標 克利金法分類之概念;最後只要將地理位置上之像元對應到求得的特 徵空間即可得知其應屬類別,以最大概似法與指標克利金法分類結果 混淆表如表 2.1~表 2.4。在此二維特徵分類中,就訓練樣本來看,在 克利金分類法之總體正確率可達到 97.35%,在驗證資料中其正確率 亦可達到 91.67%,皆分別高於最大概似法的 87.80%及 89.89%;與三 維特徵時相似,故指標克利金分類法,有其發展潛力,未來應用其指 標化特性,用以分別淹水與不淹水區域應當相當合適。
圖 2.1 指標克利金分類法架構圖 選取特徵 選取訓練樣區 將訓練樣區各點位 對應到特徵空間 選定欲分類類別 針對各類別將特徵 空間中之訓練樣本 二元化 分析各類別特徵空間 之變異(半變異圖) 依據各類別之半變異 圖,分別推估未知點 位各類別之發生機率 比較未知點位發生各 類機率,將之指定為 發生機率最高之類別 將未知類別之像元對 應至特徵空間,即可 將該像元分類 推估得各類別於特中 空間中之分佈
圖 2.2 訓練樣本在二維特徵空間各類分佈 圖 2.3(a)最大概似法推估結果 圖 2.3(b)指標克利金法推估結果 圖 2.3 最大概似法推估各類與指標克利金法推估於二維特徵空間 之分佈 表 2.1 最大概似法分類於訓練樣本之混淆表 表 2.2 最大概似法分類於驗證資料之混淆表 水體 林地 農田 建地 裸露地 水體 林地 農地 建物 裸露地 總和 使用者 正確率% 水體 355 0 0 28 40 423 83.92 林地 0 706 9 0 0 715 98.74 農地 0 27 255 0 2 284 89.79 建物 9 0 0 202 23 234 86.32 裸露地 18 0 3 47 162 230 70.43 總和 382 733 267 277 227 1886 生產者 正確率% 92.93 96.32 95.51 72.92 71.37 總體 正確率%: 89.08 水體 林地 農地 建物 裸露地 總和 使用者 正確率% 水體 201 0 0 7 14 222 90.54 林地 0 144 5 0 0 149 96.64 農地 0 23 134 0 3 160 83.75 建物 0 0 0 90 0 90 100.00 裸露地 8 0 0 11 92 111 82.88 總和 209 167 139 108 109 732 生產者 正確率% 96.17 86.23 96.40 83.33 84.40 正確率%:總體 90.30 分類類別 0 IR R 255 255 0 IR R 255 255 0 IR R 255 255 實際類別 實際類別 分類類別
表 2.3 指標克利金法分類於訓練樣本之混淆表 表 2.4 指標克利金法分類於驗證資料之混淆表 三、淹水資料與衛星雷達影像 1.歷史颱洪事件淹水範圍資料 在利用衛星影像判識淹水範圍後需以現場資料或歷史淹水記錄 來比對淹水範圍,以瞭解判識的準確性,因此本研究收集由水利署第 十河川局歷年颱洪事件之淹水範圍調查資料,收集之事件詳列如表 3.1,供參考。 表 3.1 已收集淹水範圍之颱洪事件 序號 颱洪名稱 發生時間 1 琳恩 76/10/25 2 賀伯 85/07/31 3 溫妮 86/08/18 4 安珀 86/08/29 5 瑞伯 87/10/15 6 芭比絲 87/10/26 7 象神 89/11/01 8 納莉 90/09/17 資料來源:水利署第十河川局 水體 林地 農地 建物 裸露地 總和 使用者 正確率% 水體 380 0 0 1 3 384 98.96 林地 0 730 2 0 0 732 99.73 農地 0 3 265 0 0 268 98.88 建物 0 0 0 272 4 276 98.55 裸露地 2 0 0 4 220 226 97.35 總和 382 733 267 277 227 1886 生產者 正確率% 99.48 99.59 99.25 98.19 96.92 正確率%:總體 98.99 水體 林地 農地 建物 裸露地 總和 使用者 正確率% 水體 200 0 0 5 10 215 93.02 林地 0 152 4 0 0 156 97.44 農地 0 15 135 0 1 151 89.40 建物 2 0 0 93 8 103 90.29 裸露地 7 0 0 10 90 107 84.11 總和 209 167 139 108 109 732 生產者 正確率% 95.69 91.02 97.12 86.11 82.57 正確率%:總體 91.53 分類類別 實際類別 分類類別 實際類別
2.衛星雷達影像資料 本研究主要採用加拿大 RADAR SAT 衛星雷達影像,其的飛行高 度 793-821 公里,軌道與赤道傾斜角為 98.6,波長 5.6cm , C-band, HH 偏極,解析度 10m-100m。 經查詢上述歷史事件前後數天相對應之 Radarsat 雷達影像資 料,僅有象神與納莉所拍攝到之空間位置較為符合,如圖 3.1 之簡要 位置圖所示,但象神颱風之拍攝時間為 89 年 11 月 2 日 21:40,已為 洪峰(89 年 11 月 1 日 12:00)之一天後,判斷可能不易由此影像看 到淹水現象。而納莉之拍攝時間為 90 年 9 月 17 日上午 06:05。與該 颱洪洪峰發生時刻 90 年 9 月 17 日上午 02:00 僅差約 4 小時,因此本 研究採用此影像(如圖 3.2)進行分析。 圖 3.1 納莉颱風前後 Radarsat 衛星雷達拍攝時間與涵蓋範圍
圖 3.2 Radarsat 影像全貌(13808x13381pixels, 像元間距 12.5m) 四、淹水範圍判識 本研究現階段採用分類方法進行淹水範圍之評估,由於颱洪發生 當下所能獲取的資料僅有 Radarsat 資料,故以此雷達影像資料為主, 另由於淹水之發生與地形有一定關係,所以輔以數值地形模型及坡度 資料進行分析,及本研究採用 Radasat 影像及數值地形模型,與坡度 三個特徵進行分類分析,將地表分為水體及非水體兩類,分析之影像 範圍如圖 4.1 所示,所得結果如圖 4.2,其中藍色部分為水體,白色 部分非水體,其位置於整個淡水河流域之下游,如圖 4.3 納莉颱洪淹 水範圍調查圖之黃色方框部分。 其中除河道部分外其他淹水區域之判斷較為零散無明顯邊界,其 中右上方 A 區,經比對多為水稻田等作物,故呈現大面積疑似淹水。 而左方 B 區地勢較高皆無淹水現象,影像分析結果亦顯示該區無淹 水。中下方 C 區部分分析結果有許多分散之水體反應,不像圖 4.3 之 淹水調查有明顯之邊界。
圖 4.1 納莉颱洪雷達影像分析範圍
圖 4.2 納莉颱洪分析結果
A
B
圖 4.3 第十河川局納莉颱洪淹水範圍調查圖 此外以納莉颱洪(2001 年 9 月 17 日)之衛星雷達影像(如圖 4.4)定位 後與乾季時之 2001 年 12 月 24 日之 SPOT 影像(如圖 4.4)比對可明顯 發現河道部分之行水區之通水面積顯著變大。尤其左邊疏洪道道部分 變化最大。 圖 4.4 比對範圍之雷達影像 A B C
圖 4.5 SPOT 假色影像 五、結果討論 初步結果顯示,除河道部分外其他區域之淹水判識不盡理想,此 乃由於雷達影像之解析度及其影像特性不同地物因組織構造或粗糙 度類似,可能有相似之回波,且易有斑駁雜訊,故分類極易混淆,不 易有明顯淹水邊界。此外在都市建築稠密區,由於回波主要來自於建 築物之角反射,因此以目前影像之解析度不易判斷都市建築稠密區是 否淹水,除非水體深度淹沒地表建物,此時接受到之回波才不是受角 反射現象主導。但因衛星雷達影像是目前唯一可以在颱洪時期取得之 影像資訊,因此其重要性不容忽視,要增加淹水範圍判識之正確性與 可用性可以輔以其他資訊如數值地形模型及坡度等資訊。
六、後續研究 由上述結果可知雖然衛星雷達影像可在天候不佳時取得影像資 訊,但由於影像特性及其品質與解析度的限制,需輔以其他資訊以改 善其正確性,目前本研究除衛星雷達影像並加入數值地形模型及坡度 等資訊。可改善淹水範圍之判識,為結果仍不盡理想,未來擬增加其 他資訊,例如考慮不同水深或水流狀態之回波變化,由於平坦均勻之 地面或植生其回波與水體類似,故應將地表類別列入分析,不同類別 其淹水或未淹水應會有不同回波,故先取得地表覆蓋分佈或先以同區 相近時期 SPOT 影像以地表分類加入分析應可改善正確性。 故未來如利用變遷偵測及邊界搜群等方法判斷淹水範圍外,在方 類方法判斷淹水範圍的應用上亦將以上述概念進行改善。 參考文獻 陳錕山,1990。利用衛星雷達建立水災即時監測系統之規劃。中央大 學通訊系統研究中心報告,經濟部水資源局委辦計畫。 中央大學通訊系統研究中心,1991。衛星雷達水災監測作業機制。經 濟部水資源局委辦計畫。 陳良健、陳錕山、陳繼藩、吳瑞賢,1991。應用衛星遙測技術建立公 共建設天然災害及時勘災機制之研究。中央大學太空及遙測研究中心 報告,行政院公共工程委員會委託計畫。
Atkinson, P.M., 2001. Autologistic regression for flood zonation using SAR imagery, Photogrammetric Engineering and Remote Sensing (submitted).
Cumani,A., edge detection in multispectral images, CVGIP:graphical models and image processing, vol. 53.no. 1,pp. 40-51, 1991,
Horritt, M. S., A statistical active contour model for SAR image segmentation, Image and Vision Computing, 17, pp.213-224, 1999.
Ivins, Jim and Porrill, john, Active region models for segmenting textures and colours, Image and Vision Computing 13(5), 1995, 431-438.
Pampel, F. C., Logistic Regression: A Primer, Sage University Papers Series on Quantitative Applications in the Social Sciences, 07-132, 2000. Petrie, G. M. , 1994. “Responsiveness of Satellite Remote Sensing and Image Processing Technologies for Monitoring and Evaluating 1993 Mississippi RiverFlood Developments Using ERS-1 SAR, LANDSAT, and SPOT Digital Data” , ASPRS/ACSM.
Profeti G. and H. Macintosh, 1997. “Flood management through landsat TM and ERS SAR data: a case study”,Hydrological processes, Vol.11, pp.1397-1408.
Rosenfeld A. and Banerjee, S., maximum-likelihood edge detection in digital signals, CVGIP: Image Understanding, pp.1-13, 1992.
Touzi, R., Lopes, A., Bousquet, P., a statistical and geometrical edge detector for SAR Images, IEEE. Transactions on geoscience and remote sensing, 26(6), pp.764-773, 1988.
Williams, D. J., and Shah, M., a fast algorithm for active contours and curvature estimation, CVGIP: Image Understanding, 55, pp.14-26,1992.