國
立
交
通
大
學
資訊科學與工程研究所
博
士
論
文
雙階層車載隨意網路暨同儕網路之資訊擷取系統研究
A Study of a Two-Tier VANET/P2P System
for Information Retrieval Services
研 究 生:鄭建明
指導教授:曹孝櫟 教授
雙階層車載隨意網路暨同儕網路之資訊擷取系統研究
A Study of a Two-Tier VANET/P2P System
for Information Retrieval Services
研 究 生:鄭建明
Student:Chien-Ming Cheng
指導教授:曹孝櫟 教授
Advisor:Prof. Shiao-Li Tsao
國 立 交 通 大 學
資 訊 科 學 與 工 程 研 究 所
博 士 論 文
A Dissertation
Submitted to Institute of Computer Science and Engineering College of Computer Science
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Doctor of Philosophy
in
Computer Science
June 2014
Hsinchu, Taiwan, Republic of China
i
雙階層車載隨意網路暨同儕網路之資訊擷取系統研究
學生:鄭建明
指導教授
:曹孝櫟 教授
國立交通大學資訊科學與工程研究所博士班
中文摘要
資訊與通訊科技的進步讓車輛可合作分享與擷取有用的資訊,以提供智慧型運輸系統 之服務。為了提供這類服務,需要設計一套資訊擷取系統,有效率地在移動的車輛和 路邊設施之間擷取資訊。在這篇論文中,我們首先分析與歸納於車載環境提供資訊擷 取服務之系統架構。當車輛密度高時,採用短距離的車間隨意通訊(intervehicle ad hoc communication)之單階層系統可於短時間內取得所需資訊。另一方面,採用長距離 的基礎建設無線通訊(infrastructure-based communication)與同儕網路(peer-to-peer networking)之單階層系統則可提供高成功率的資訊擷取,而不受限於車輛的數量。 然而,對於提供資訊擷取服務,單階層系統可能遭遇較低的擷取成功率或需要較長的 通訊時間。為了善用兩種無線通訊系統,我們提出雙階層車載隨意網路(VANET) 暨同儕網路(P2P)之系統架構,此雙階層系統整合一個低階的車載隨意網路與另個 高階的同儕網路,於車載環境提供資訊擷取服務。我們分析比較單階層系統與所提出 之雙階層系統,並透過模擬實驗的方式評估效能。實驗結果顯示,相較於單階層車載 隨意網路之系統,雙階層系統可明顯提高資訊擷取的成功率;相較於單階層基礎建設 通訊式同儕網路之系統,雙階層系統可降低資訊擷取所需的時間與訊息負擔。最後, 我們提出適應性搜尋協定以提升雙階層系統於資訊擷取的效能。此搜尋協定採用 Bloom filter 以收集路段的可到達狀況,評估路段的可到達機率而調整資訊擷取時的 訊息傳送方式。對於雙階層資訊擷取系統,模擬實驗結果顯示,相較於原有的搜尋機ii
制,此適應性搜尋協定可減少資訊擷取所需的時間與訊息負擔,亦可達到資訊擷取的 高成功率。
iii
A Study of a Two-Tier VANET/P2P System
for Information Retrieval Services
Student: Chien-Ming Cheng
Advisor: Prof. Shiao-Li Tsao
Institute of Computer Science and Engineering
College of Computer Science
National Chiao Tung University
A
BSTRACTWith advance in information and communication technologies, vehicles on roads can cooperatively share and retrieve information in a distributed manner to support Intelligent Transportation Systems (ITS) services such as traffic management and infotainment services. To support such services, a system is needed to retrieve information and data from moving vehicles and roadside facilities in an efficient manner. In this dissertation, we first classify system architectures for information retrieval services in a vehicular environment. Single-tier systems based on short-range intervehicle ad hoc communication can achieve the shortest latency if vehicle density is sufficient. On the other hand, single-tier systems based on long-range infrastructure-based wireless communication and peer-to-peer (P2P) networking technology can provide a high success rate without the need for a sufficient density. However, the single-tier systems relying on either vehicular ad hoc networks (VANETs) or an application-layer P2P overlay over infrastructure-based networks may suffer from low success rate or long latency in information retrieval. To take advantage of both ad hoc and infrastructure-based communications, we propose a two-tier
iv
VANET/P2P architecture that integrates low-tier VANETs and a high-tier infrastructure-based P2P overlay network for providing information retrieval services in the vehicular environment. We provide a qualitative analysis of the single-tier and the proposed two-tier architectures. The performance of different system architectures is evaluated and analyzed through simulation. Our results demonstrate that an information retrieval system based on the proposed two-tier VANET/P2P architecture can significantly improve success rate compared to the single-tier VANET-based systems while reducing lookup latency and message overhead compared to the single-tier infrastructure-based P2P systems. In the last part of this dissertation, we propose an adaptive lookup protocol to improve the efficiency of information retrieval in the two-tier VANET/P2P system. The proposed protocol uses the concept of the Bloom filter to collect reachability information of road segments. Therefore, adaptive routing of lookup queries between low-tier and high-tier networks according to reachability probability can be employed. Simulation results show that compared to the conventional two-tier lookup mechanism, the adaptive lookup protocol can reduce the lookup latency and lookup overhead, and also achieve a high success rate in information lookups.
v
誌謝
完成這篇論文首先須感謝指導老師—曹孝櫟教授,在博士班期間給予的教導和幫助。 感謝交大張明峰教授和王協源教授擔任我的論文指導及審查委員,於博士論文計畫書 審查與校內論文口試時,給予許多寶貴的建議。感謝清大許健平教授、中正黃仁竑教 授、台大黃寶儀教授和成大鄭憲宗教授擔任我的博士學位考試委員,撥冗指導我的博 士論文。 感謝交大 BRASS 實驗室的夥伴們,包括一正、凱翔、金璋、宥霖、邦翔、誌謙、中 暉、名杰、雅筑、建臻、政龍、薪中、科文、珮筠、佳育、易聖、勇旗、承威、培書、 宇安、星斐、佳駿、冠志等,謝謝大家多年來在研究、課程、計畫的合作和幫助。同 時,感謝系辦助理蘇誼嫻小姐和曹雅珽小姐兩位的多年幫忙。 最後,也是最重要的,要感謝我的家人。感謝父親和母親的關心和體諒,更感謝姊姊 在高雄全心全力細心照顧家人。特別要感謝老婆—慧怡,支持和鼓勵我完成博士論 文,尤其辛苦地孕育了我們的第一個寶寶—可愛的女兒。vi
T
ABLE OFC
ONTENTS 中文摘要 ... i Abstract ... iii 誌謝 ... v Table of Contents ... vi List of Tables ... ix List of Figures ... x Chapter 1 Introduction ... 1Chapter 2 Single-Tier Information Retrieval Systems ... 5
2.1 Single-Tier VANET System ... 6
2.2 Single-Tier P2P over VANET System ... 8
2.3 Single-Tier Infrastructure-Based P2P System... 11
Chapter 3 A Two-Tier VANET/P2P Information Retrieval System ... 14
3.1 Assumptions ... 15
3.2 Superpeer Election in Low-Tier VANETs ... 16
3.3 High-Tier Peer-to-Peer Overlay Organization ... 18
3.3.1 Unstructured Peer-to-Peer Overlay ... 18
3.3.2 Structured Peer-to-Peer Overlay ... 20
3.4 Information Sharing and Retrieval ... 22
3.4.1 Information Lookup in VANETs ... 22
3.4.2 Information Lookup in Unstructured Peer-to-Peer Overlay ... 23
vii
3.4.4 An Example of Information Retrieval ... 25
3.5 A General VANET/P2P System Model ... 26
3.6 Design Issues and Comparisons ... 28
3.6.1 Network Connectivity ... 28
3.6.2 Information Sharing ... 29
3.6.3 Information Lookup ... 30
3.6.4 Peer-to-Peer Overlay Construction ... 31
3.7 Performance Evaluation ... 35
3.7.1 Setup ... 35
3.7.2 Results ... 37
3.8 Summary ... 46
Chapter 4 Adaptive Two-Tier Lookup Protocol ... 47
4.1 Reachability Model ... 49
4.2 Lookup Initiation ... 53
4.3 Lookup Forwarding ... 57
4.4 Performance Evaluation ... 60
4.4.1 Setup ... 61
4.4.2 Results in a Stationary Scenario ... 64
4.4.3 Results in a Mobility Scenario ... 68
4.5 Summary ... 79
viii
ix
L
IST OFT
ABLESTable I: Comparison of architectures for information retrieval services. ... 33 Table II: Simulation parameters. ... 61
x
L
IST OFF
IGURESFigure 2.1: Example of single-tier VANET architecture. ... 6
Figure 2.2: Example of single-tier P2P over VANET architecture based on Chord. ... 9
Figure 2.3: Example of single-tier infrastructure-based P2P architecture based on Chord. ... 12
Figure 3.1: Example of two-tier VANET/P2P system. ... 14
Figure 3.2: Example of two-tier VANET/P2P system based on Gnutella. ... 19
Figure 3.3: Example of two-tier VANET/P2P system based on Chord. ... 21
Figure 3.4: Example of information retrieval in two-tier VANET/P2P system based on a Gnutella-based P2P overlay. ... 26
Figure 3.5: A general VANET/P2P model and the two-tier system based on the model. 27 Figure 3.6: Single-tier systems based on the general VANET/P2P model. ... 28
Figure 3.7: Lookup success rate for different approaches. ... 38
Figure 3.8: Lookup latency for different approaches. ... 40
Figure 3.9: VANET bandwidth usage for different approaches. ... 41
Figure 3.10: P2P overlay bandwidth usage for different approaches. ... 42
Figure 3.11: Lookup success rate under different clustering periods. ... 43
Figure 3.12: Lookup latency under different clustering periods. ... 44
Figure 3.13: Lookup success rate under different clustering hops. ... 45
Figure 3.14: Lookup latency under different clustering hops. ... 45
Figure 4.1: Example of conventional information retrieval in the two-tier VANET/P2P system. ... 48
Figure 4.2: Algorithms for maintaining reachability information using m-bit Bloom filters. ... 51
xi
Figure 4.3: Lookup initiation for the normal peer and initiating superpeer... 56
Figure 4.4: Lookup forwarding in the P2P overlay and VANETs. ... 59
Figure 4.5: Example of the adaptive lookup protocol in the two-tier VANET/P2P system. ... 59
Figure 4.6: Lookup success rate in a stationary scenario. ... 65
Figure 4.7: Lookup latency in a stationary scenario. ... 66
Figure 4.8: VANET lookup overhead in a stationary scenario. ... 67
Figure 4.9: P2P lookup overhead in a stationary scenario. ... 68
Figure 4.10: Lookup success rate in a mobility scenario. ... 70
Figure 4.11: Lookup latency in a mobility scenario. ... 72
Figure 4.12: VANET lookup overhead in a mobility scenario. ... 73
Figure 4.13: P2P lookup overhead in a mobility scenario. ... 73
Figure 4.14: Lookup success rate in a mobility scenario. ... 75
Figure 4.15: Lookup latency in a mobility scenario. ... 76
Figure 4.16: VANET lookup overhead in a mobility scenario. ... 78
1
C
HAPTER
1 I
NTRODUCTION
Advances in information and communication technologies enable vehicles on roads to cooperatively share information and data to support intelligent transportation systems (ITS) services, such as vehicle safety [1], traffic management [2], [3], and infotainment services [4], without requiring a centralized server. For example, current traffic conditions in a specific road segment can be obtained by sending queries to the vehicles either driving on the road segment or near the area. In addition, a gas station may advertise its price information in a local area so that nearby vehicles can receive these messages. The growing necessity for sharing and retrieving required information among vehicles has motivated the creation of an information retrieval infrastructure in a vehicular environment.
Information sharing and retrieval require the support of wireless communication to transmit and receive data to and from moving vehicles. Recently, two major types of wireless communication technologies have been considered in the vehicular environment [5]. They are short-range ad hoc communication, such as IEEE 802.11p, also known as intervehicle communication (IVC), and long-range infrastructure-based communication, such as Mobile WiMAX and LTE. IVC provides direct and low-latency communication between vehicles without requiring an infrastructure support [6]. Vehicles communicate with each other in a hop-by-hop manner to establish vehicular ad hoc networks (VANETs). A number of systems have been proposed to share traffic information [2], [7] and content delivery [4] over VANETs. However, these systems require a sufficient number of vehicles participating in VANETs. VANETs may become disconnected under low vehicle densities, and thus, information and data may not be exchanged among vehicles where low vehicle densities occur.
2
On the other hand, infrastructure-based wireless communication, which can offer a wide range of communication to vehicles, does not suffer from a network disconnectivity problem. Recent research [3] has used infrastructure-based cellular communication to implement a cooperative traffic information service among vehicles. In particular, an application-layer service overlay is built over an infrastructure-based network using peer-to-peer (P2P) networking technology [8]. Vehicles cooperatively share and retrieve traffic information over the infrastructure-based P2P overlay network. However, significant service delays may be introduced in this type of system because of limited network bandwidths and high communication latencies through base stations and mobile communication core networks.
The systems described above utilize VANETs, infrastructure-based networks, or an application-layer P2P overlay network to provide information retrieval services in the vehicular environment. We classify these systems as single-tier information retrieval systems. As vehicles are envisioned to support multiple wireless access technologies [5], [9], they can communicate with each other via not only direct ad hoc communication but also infrastructure-based communication. Direct intervehicle communication provides low communication latencies (e.g., a few milliseconds) in connected areas while infrastructure-based communication offers a wide range of communication with longer latencies (e.g., on the order of hundreds of milliseconds). To exploit the two communication systems, we propose a two-tier VANET/P2P architecture that integrates low-tier VANETs and a high-tier infrastructure-based P2P overlay network. In low-tier VANETs, vehicles can directly exchange and collect information using IVC efficiently. In addition, certain vehicles are elected to establish a P2P overlay through infrastructure-based communication to alleviate the disconnectivity problem in VANETs. Vehicles cooperatively share information with each other and send queries through low-tier
3
VANETs and the high-tier P2P overlay to retrieve information of interest. An information retrieval system based on the two-tier VANET/P2P architecture can achieve a high lookup success rate, low lookup latency, and low maintenance overhead compared with the single-tier systems.
The conventional design of the information lookup in the two-tier VANET/P2P system simultaneously performs queries over the low-tier VANETs and high-tier P2P overlay network. Although this increases the lookup success rate and improves the lookup response time, this approach may introduce redundant lookup messages and delays. For example, it is unnecessary to forward and broadcast lookups to the P2P overlay if the lookup message can be delivered to the intended destination through well-connected VANETs. Moreover, a query should be directed from the P2P overlay to VANETs to minimize the lookup latency if the query can be routed to the destination through the VANETs. Making full use of VANETs can improve the lookup speed and reduce redundant lookups in the infrastructure communication network whose radio resources are relatively expensive. Therefore, we propose an adaptive lookup protocol for the two-tier VANET/P2P system. The proposed protocol uses the concept of the Bloom filter [10] to exchange reachability information of road segments among vehicles in VANETs. The reachability of a road segment indicates whether the road segment can be reached through low-tier VANETs. The Bloom filter is a space-efficient probabilistic data structure that can considerably reduce storage and wireless communication overheads for information exchanges between vehicles. Although the reachability information maintained by Bloom filters can only provide an estimation regarding whether a query can be routed to a specific road segment through the VANETs, simulation results show that the design fits and can accommodate the dynamic nature of a vehicular environment. The proposed protocol forwards lookups adaptively between the low-tier VANETs and high-tier P2P overlay network according to the reachability of the
4
destination. Therefore, compared with the conventional two-tier lookup mechanism, the latency of information retrieval and the lookup message overheads can be significantly reduced in the two-tier VANET/P2P system by applying the adaptive lookup protocol.
The rest of this dissertation is organized as follows. Chapter 2 presents single-tier architectures and existing systems for information retrieval in a vehicular environment. Chapter 3 proposes a two-tier VANET/P2P information retrieval system, compares different system architectures, and provides a performance evaluation through simulation. Chapter 4 proposes an adaptive lookup protocol to improve the performance of the two-tier VANET/P2P system. Finally, Chapter 5 concludes this dissertation and suggests some future directions.
5
C
HAPTER
2 S
INGLE
-T
IER
I
NFORMATION
R
ETRIEVAL
S
YSTEMS
ITS have attracted considerable interest from both academia and industries in recent years. Several ITS services, which improve driver convenience, rely on the sharing and retrieval of relevant information among vehicles. For instance, a cooperative traffic information system is a typical example of information retrieval services in a vehicular environment. Vehicles collaboratively collect traffic-related information and exchange the information among themselves. A navigation system in vehicles can provide drivers with optimal routes according to collected traffic information.
To support information retrieval services, a vehicle is assumed to be able to obtain its geographic position and moving speed via Global Positioning System (GPS) or other means. It has a map database consisting of road topology information. A computing system is installed in the vehicle to process and analyze data. Vehicles can be equipped with wireless interfaces for ad hoc communication and/or infrastructure-based communication to share information with other vehicles and roadside units. In addition, vehicles may organize themselves into an application-layer service overlay (i.e., a P2P overlay) for efficient information sharing and retrieval.
According to the use of wireless technologies and system architectures, we classify vehicular systems for information retrieval services into four different architectures: single-tier VANET, single-tier P2P over VANET, single-tier infrastructure-based P2P, and two-tier VANET/P2P. To our knowledge, this is the first work to provide the classification of architectures and analysis of alternative vehicular information retrieval systems. This chapter presents the first three single-tier architectures and existing systems, and the next
6
chapter presents the proposed two-tier VANET/P2P architecture.
2.1 Single-Tier VANET System
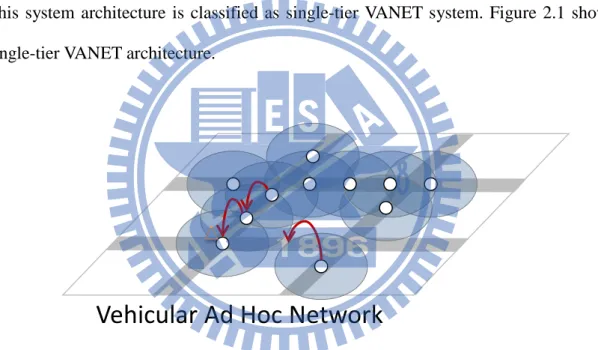
Vehicles communicate with each other through IVC to establish VANETs. They periodically broadcast messages via IVC to exchange information (e.g., speeds and positions) with neighboring vehicles. A part of the information that a vehicle receives from others may also be propagated to its neighbors through broadcast messages. Thus, information could be disseminated to vehicles located far away in a hop-by-hop manner. This system architecture is classified as single-tier VANET system. Figure 2.1 shows the single-tier VANET architecture.
Vehicular Ad Hoc Network
Figure 2.1: Example of single-tier VANET architecture.
The single-tier VANET architecture is easy to be utilized to support vehicle safety applications. In [1], vehicles in a geographical area are grouped together and exchange safety-related information via IVC. When vehicles are far from each other, they report safety information to roadside entities, which then forward this information to other vehicles. A vehicle safety system based on the single-tier VANET architecture requires the
7
installation and maintenance of roadside entities to distribute safety-related information to all vehicles. A number of decentralized traffic information systems also have been developed based on this architecture. Vehicles cooperatively observe traffic conditions of local areas and exchange traffic information among themselves using IVC. A vehicle can generate traffic reports for road segments based on its observations and traffic messages obtained from other vehicles. A common approach is to aggregate and average the speeds of vehicles on a road segment to derive the traffic report for the road segment. In the Self-Organizing Traffic Information System (SOTIS) [2], [11], vehicles periodically broadcast their driving status (e.g., current speeds and positions) with parts of the information of other road segments that are collected from neighboring vehicles. A vehicle processes and analyzes the collected traffic information and stores analysis results in a database. As a result, each vehicle gathers traffic information of the local road segments (for example, a radius of 50 km) with an average information delay of up to 20 minutes. StreetSmart focuses on discovering and disseminating congestion information [12]. Vehicles use data clustering algorithms to aggregate the collected data and exchange only the most significant information such as areas of unexpected speed. However, the traffic information may be outdated or incomplete, especially for road segments far away from the vehicle.
In addition to cooperative traffic information sharing, content delivery has emerged as another promising paradigm for information retrieval in the vehicular environment. CarTorrent [13] adopts a BitTorrent-like swarming protocol [14] to provide content sharing among vehicles in VANETs. Vehicles use a gossip mechanism to periodically disseminate their content availability information, and to gather statistics from other vehicles. In addition to downloading content blocks from the Internet through roadside access points (APs), vehicles can obtain content blocks from other vehicles thorough direct IVC when
8
moving out of an AP coverage. A service infrastructure over VANETs was proposed in [15] to provide users with time-sensitive information regarding traffic conditions and roadside services using IVC. An application-layer communication protocol [16] is utilized to perform location-aware queries between vehicles over VANETs. However, a query failure would occur if a route between the source and target location areas cannot be found due to insufficient VANET connectivity.
Systems based on the single-tier VANET architecture use only intervehicle ad hoc communication, and may assume the presence of a sufficient number of participating vehicles in VANETs for transmitting information and data. In VANETs, information can be quickly disseminated among vehicles through IVC. However, the dissemination requires a sufficient number of vehicles participating in the network. When the vehicle density is insufficient, vehicles may not be able to form a fully connected VANET. In that case, information cannot be distributed to all vehicles or retrieved over a large distance. To improve the connectivity, additional roadside units connected via a backbone network could be used to exchange information with vehicles via wireless communication [17]. However, the additional roadside units introduce extra installation and maintenance costs. Another issue for the single-tier VANET system is the broadcast storm problem in a high-vehicle-density environment if each vehicle rebroadcasts every received message. A number of solutions have been presented to alleviate the problem [18], [19]. For example, a vehicle rebroadcasts the query message only if it is closer to the road segment where the requested information is located than the previous node.
2.2 Single-Tier P2P over VANET System
9
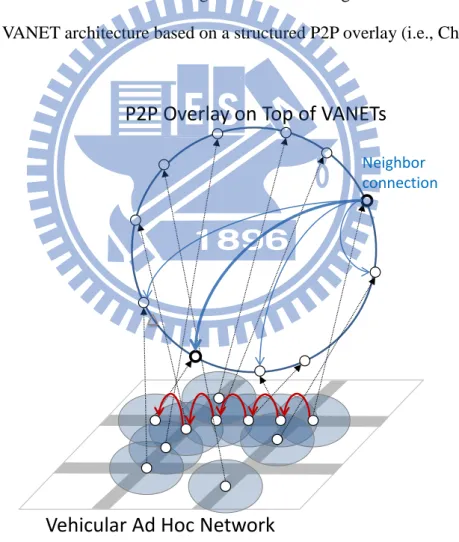
sharing and retrieval in a distributed manner [8]. The above architecture can be further extended to a single-tier P2P over VANET architecture. Vehicles form an application-layer P2P overlay network on top of VANETs. The P2P overlay can be unstructured such as Gnutella [20], or structured such as Chord [21]. The vehicles share their resources (e.g., data content and traffic information) and retrieve resources from others through the P2P overlay. The communication between vehicles in the application-layer P2P overlay relies on the routing protocol of the underlying VANETs [22]. A vehicle should establish a routing path in the VANETs first; then an application-layer message can be transmitted along the route to another vehicle through the VANETs. Figure 2.2 shows an example of the P2P over VANET architecture based on a structured P2P overlay (i.e., Chord).
P2P Overlay on Top of VANETs
Vehicular Ad Hoc Network
Neighbor connection
10
The key difference between the P2P over VANET architecture and the previous architecture is the information lookup. In the previous architecture, a vehicle floods a query message to all neighboring vehicles within the IVC range. In this architecture, a vehicle explicitly forwards the query to certain vehicles by exploiting the application-layer P2P lookup mechanism and the underlying VANET routing. For example, in an unstructured P2P overlay such as a Gnutella-based system, the lookup is based on time-to-live (TTL)-limited flooding in the application-layer P2P overlay. If a vehicle does not have the desired information, it forwards the query to its Gnutella neighbors, not direct VANET neighbors, through the VANET routing paths. On the other hand, in a structured P2P overlay such as a Chord-based system, a vehicle examines its finger table to select the Chord neighbor whose identifier is closest to the key of the requested information. The vehicle directly forwards the query message to the neighbor through the established VANET routing path. The lookup procedure continues until the query reaches the vehicle responsible for the key. Moreover, because vehicles are usually moving, the participating vehicles and P2P overlay topology continuously change. The P2P overlays thus require performing periodic stabilization procedures to maintain neighbor connections. For example, in an unstructured P2P overlay such as Gnutella, vehicles must periodically send query messages (i.e., PING) to their P2P neighbors. A response message (i.e., PONG) is sent in reply if a P2P neighbor remains in the overlay. When a vehicle detects the departure of a neighbor, it randomly connects to another vehicle as its new P2P neighbor.
Recent studies of P2P file-sharing systems in mobile and vehicular ad hoc networks have adopted the architecture. The P2P overlay enables users to locate the resources they need in such an environment. To improve performance of the application-layer P2P protocol, cross-layer approaches that extract useful information from the lower-layer protocol messages for supporting the construction and maintenance of the upper-layer P2P
11
network were proposed [4]. Although the architecture can also be applied to a traffic information system, maintaining the services is difficult due to dynamics of traffic information and high vehicular mobility.
In the P2P over VANET architecture, the application-layer P2P overlay is utilized for vehicles to locate the requested information efficiently. Although the architecture may minimize redundant rebroadcasts of query messages, additional efforts are required for maintaining the application-layer P2P overlay in VANETs. The transmission of lookup and maintenance messages through the P2P overlay requires the use of underlying VANET routing protocols and must introduce routing overhead in the bandwidth-limited VANETs. Additionally, due to the P2P overlay being built on top of the VANETs, the architecture also suffers from the same disconnectivity problem under low vehicle densities as the previous single-tier VANET system.
2.3 Single-Tier Infrastructure-Based P2P System
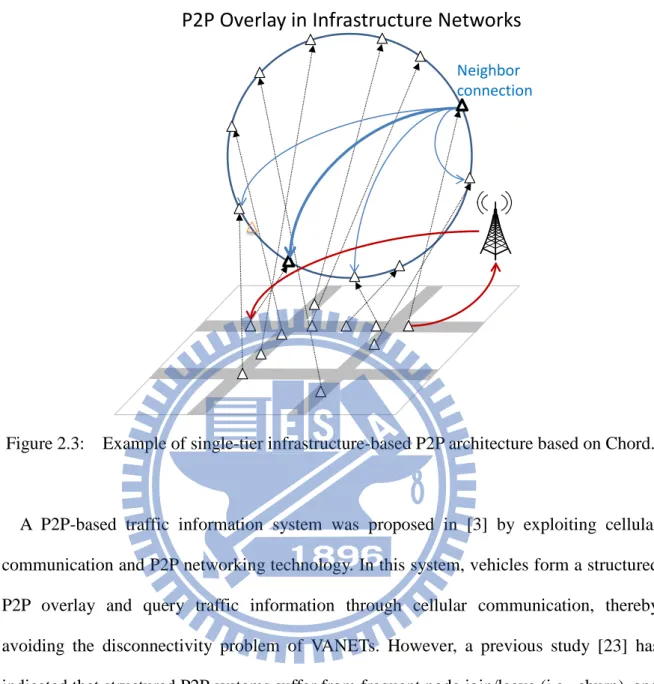
To overcome the disconnectivity problem of VANETs, another single-tier architecture involves forming an application-layer P2P overlay in an infrastructure-based network, instead of on top of VANETs. This system architecture is classified as single-tier infrastructure-based P2P system. Vehicles are required to have a broadband wireless interface to access the infrastructure-based network. Vehicles communicate with each other through infrastructure-based communication instead of direct ad hoc communication. The P2P overlay could also be unstructured or structured. Figure 2.3 shows an example of the single-tier infrastructure-based architecture based on a structured P2P overlay (i.e., Chord).
12
P2P Overlay in Infrastructure Networks
Neighbor connection
Figure 2.3: Example of single-tier infrastructure-based P2P architecture based on Chord.
A P2P-based traffic information system was proposed in [3] by exploiting cellular communication and P2P networking technology. In this system, vehicles form a structured P2P overlay and query traffic information through cellular communication, thereby avoiding the disconnectivity problem of VANETs. However, a previous study [23] has indicated that structured P2P systems suffer from frequent node join/leave (i.e., churn), and they are less efficient than unstructured P2P systems in a dynamic network environment such as mobile and vehicular networks. Although the approach utilizes an infrastructure-based communication system to avoid network disconnectivity, lookup delays in an infrastructure-based P2P overlay may increase because the communication latency of an infrastructure network is significantly greater than that of VANETs. Moreover, this architecture does not utilize the IVC, which is an efficient and low-latency solution for
13 short-distance information exchanges.
14
C
HAPTER
3 A
T
WO
-T
IER
VANET/P2P
I
NFORMATION
R
ETRIEVAL
S
YSTEM
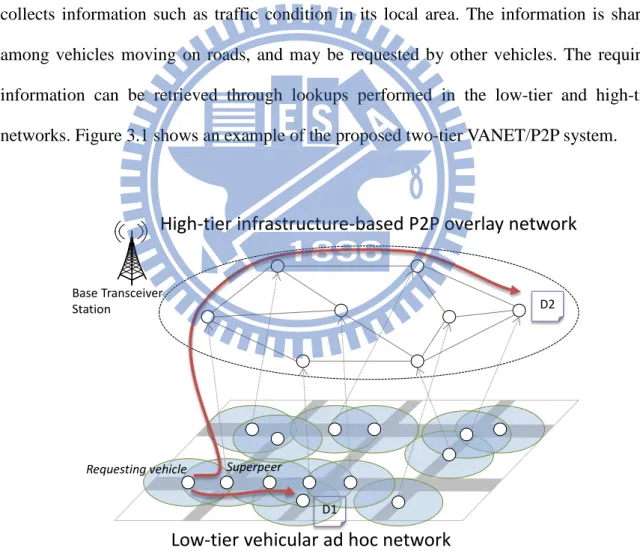
We propose an information retrieval system based on a two-tier VANET/P2P architecture, which consists of low-tier VANETs and a high-tier infrastructure-based P2P overlay network. Vehicles that participate in low-tier VANETs can communicate with each other through IVC, whereas only a portion of vehicles are elected to form a high-tier P2P overlay through infrastructure-based wireless communication. Each vehicle observes and collects information such as traffic condition in its local area. The information is shared among vehicles moving on roads, and may be requested by other vehicles. The required information can be retrieved through lookups performed in the low-tier and high-tier networks. Figure 3.1 shows an example of the proposed two-tier VANET/P2P system.
High-tier infrastructure-based P2P overlay network
Low-tier vehicular ad hoc network
Requesting vehicle D2 D1 Superpeer Base Transceiver Station15
In this chapter, we first present assumptions made by the proposed system in Section 3.1 and then present a detailed design of the two-tier VANET/P2P system in Sections 3.2, 3.3, and 3.4. Section 3.5 generalizes the proposed VANET/P2P architecture as a general system model. Section 3.6 discusses several design issues for information retrieval services in a vehicular environment and compares the proposed two-tier system with single-tier systems. Finally, we evaluate the performance of different systems through simulation in Section 3.7.
3.1 Assumptions
With continuous advances in technology, it is feasible to assume that each vehicle can obtain its driving conditions, such as current geographic location and current speed using in-vehicle sensors (e.g., GPS receivers). A vehicle is equipped with a digital map database consisting of information regarding road topology and roadside facilities (e.g., gas stations and parking lots). Road topology is divided into road segments, each of which is associated with a unique segment identifier (ID) and geographic location. Because vehicles are envisioned to communicate across multiple wireless interfaces, each vehicle is assumed to be equipped with two wireless communication interfaces: one for direct ad hoc communication and the other for infrastructure-based communication. However, the two-tier VANET/P2P system does not strictly require all the vehicles to be equipped with two wireless interfaces. A vehicle equipped with only one interface is able to communicate with others in the two-tier system through the vehicles equipped with the two wireless interfaces, as will be discussed later.
In a vehicular environment, information available to or requested by users is typically related to geographic locations. Therefore, the information requested through the system is
16
assumed to be related to a road segment that can be identified by its segment ID. A request for information made by users explicitly specifies the road segment (i.e., segment ID) where the information is located. It is further assumed that the required information related to a road segment can be obtained from the vehicles currently driving on that road segment. Although there is a reasonable possibility that vehicles are aware of nearby information, data processing functions such as data aggregation and compression may need to be performed on the collected data to fulfill the requirements of particular applications. For example, to estimate the traffic condition of a road segment, a common approach is to collect speed information from vehicles driving on the road segment and then apply a data aggregation scheme to derive the average speed for the road segment [11]. A data compression scheme may also be adopted to disseminate multiple data in a single message to nearby vehicles. This data processing, which may be correlated with or independent of the retrieval process, is closely related to information types and application requirements. This study focuses on the service infrastructure (i.e., system architecture and retrieval mechanism), and leaves the integration of data processing and information retrieval services to achieve high-level applications and services to future work.
3.2 Superpeer Election in Low-Tier VANETs
VANETs are established among vehicles through IVC. In low-tier VANETs, vehicles are organized into groups (i.e., clusters). Several distributed clustering mechanisms have been proposed to form group structures in mobile and vehicular ad hoc networks based on metrics, such as node ID, connectivity degree, and vehicle mobility (e.g., direction and speed) [24], [25]. The two-tier VANET/P2P system adopts a heuristic Max-Min d-cluster formation [26] to form multi-hop clusters based on node IDs. Each vehicle is assigned a
17
unique node ID, which can be generated, for example, by hashing the vehicle registration identifier. Vehicles periodically broadcast messages through IVC to exchange node information, such as node IDs and current location, with neighboring vehicles. After the exchanges, a vehicle is elected as a clusterhead if it has the largest ID among the vehicles within d hops or it is the largest node in the d-hop neighborhood of one of its d-hop neighbors. In addition to node IDs that the Max-Min d-cluster algorithm refers to, previous studies on clustering algorithms (e.g., [25]) further adopt vehicle mobility to obtain a stable cluster structure in a high-mobility vehicular environment. Improving the stability of the cluster structure by incorporating other clustering algorithms in the proposed two-tier system is a direction for future work.
Each vehicle can recognize it as a clusterhead or knows its clusterhead if it is not. In the two-tier system, a clusterhead is called a superpeer, and other vehicles in the cluster are called normal peers. Vehicles, including superpeers and normal peers, are able to communicate with one another through IVC in VANETs. No difference between superpeers and normal peers appears from a VANET perspective. The message overhead of maintaining the cluster structure decreases when the frequency of superpeer election decreases. However, if the superpeer election is performed much less frequently, the lookup success rate decreases. This is because normal peers may move out of range of their superpeers and cannot communicate with their superpeers if the superpeer election is conducted infrequently. On the other hand, normal peers may not be able to communicate with their superpeers through neighboring nodes when a larger cluster size in used. Therefore, we examine the effects of superpeer election frequency and cluster size on system performance in Section 3.7.
All normal peers rely on superpeers to access the high-tier P2P overlay; therefore, additional computation and communication costs are imposed on the superpeers. An issue
18
of fairness arises as a vehicle serving as the superpeer all the time may be undesirable. To deal with this issue, one simple approach is to use a different node ID when a vehicle re-joins the system. For example, a vehicle can generate a different node ID by hashing its original ID with a random number upon joining. The vehicle with the largest node ID will not be elected as the superpeer again because it may have a different node ID. To achieve improved fairness, the ID generation can account for the time periods of being a superpeer. The longer the period, the smaller the node ID is generated next time. Moreover, an incentive mechanism can be incorporated into the information retrieval service so that users would be willing to take the role of superpeers.
3.3 High-Tier Peer-to-Peer Overlay Organization
The vehicles elected as superpeers use their infrastructure-based communication interfaces to form an application-layer P2P overlay where the superpeers cooperate to share information with each other and provide information retrieval services to other vehicles. P2P networking technology has been widely used as an efficient approach in content sharing and information retrieval without requiring a centralized server [8]. An application-layer P2P overlay is constructed by participating nodes (i.e., vehicles for the information retrieval service under consideration). P2P overlay networks can be classified as unstructured (e.g., Gnutella [20]) and structured (e.g., Chord [21]) according to network topology and content placement. We use Gnutella and Chord as examples to construct an unstructured and structured high-tier P2P overlay, respectively, and present the two overlay designs in the following.
19
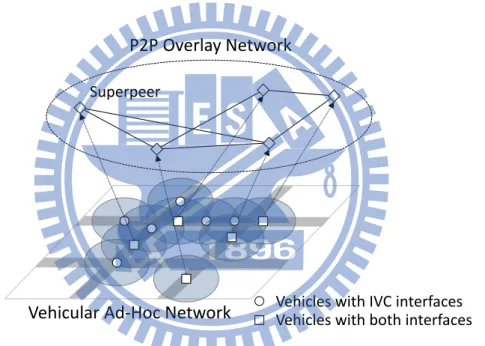
When a new superpeer joins a Gnutella-based P2P overlay, it first connects to any superpeer that is already in the overlay. In P2P systems, information about existed nodes in the P2P overlay can be obtained by contacting some well-known bootstrap node. The joining superpeer acquires the information of other superpeers in the overlay, randomly establishes connections with some of them, and maintains neighbor information in a neighbor table. After joining the P2P overlay, the new superpeer can share its information with other superpeers and retrieves information from the P2P overlay. Figure 3.2 shows an example of the two-tier VANET/P2P system based on a Gnutella-based P2P overlay.
Vehicular Ad-Hoc Network
P2P Overlay Network
Superpeer
Vehicles with both interfaces Vehicles with IVC interfaces
Figure 3.2: Example of two-tier VANET/P2P system based on Gnutella.
Since vehicles are usually moving, the members of the high-tier P2P overlay (i.e., superpeers) may continuously change. Thus, superpeers must perform a stabilization procedure to maintain their neighbor connections. To do so, superpeers periodically send PING messages to their neighbors, and receive PONG messages if a neighbor is still alive. When a superpeer detects the departure of a neighbor (i.e., no receipt of a PONG), it randomly connects to another superpeer as its new neighbor and maintains the new
20
neighbor connection. The messages used to establish and maintain the P2P overlay are transmitted between superpeers using infrastructure-based wireless communication.
To further improve the stability of P2P overlay, a graceful departure mechanism can be applied to the two-tier system. After new superpeers join the P2P overlay, the previous superpeers stay a few seconds before stepping down in the P2P overlay. Therefore, there is an overlapping (or handover) period for old and new superpeers. This graceful departure mechanism ensures that the P2P overlay is stable and that there are always a sufficient number of superpeers to forward queries in a P2P overlay.
3.3.2 Structured Peer-to-Peer Overlay
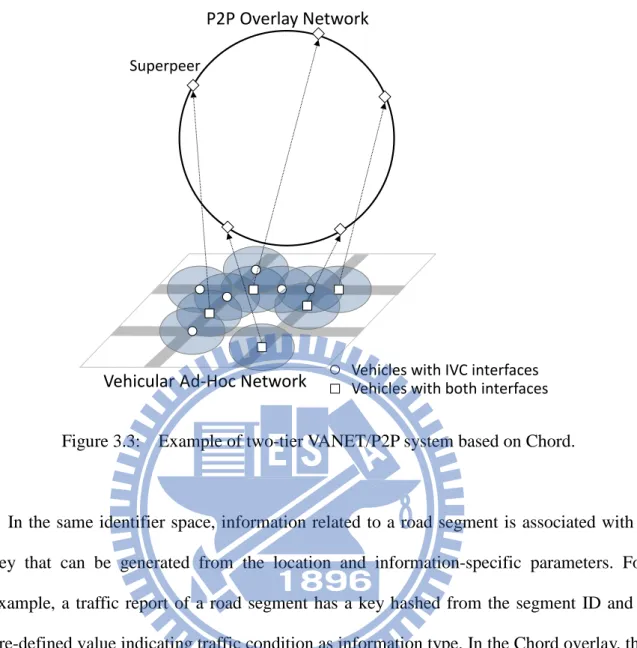
In a Chord-based P2P overlay, superpeers establish a structured overlay in the form of a Chord ring. The ring topology is an m-bit identifier space ranging from 0 to 2m-1. Each superpeer has a unique identifier (i.e., node ID) hashed from some identifier such as the vehicle identifier number (VIN). The node ID is mapped into the identifier space. The node ID used in the P2P overlay may be the same as or different from that used for superpeer election. Each superpeer maintains a finger table with at most m entries. The ith entry in the finger table of a superpeer with ID n is the first superpeer whose ID is at least 2i-1 away from n in the ring space. A superpeer n also maintains the predecessor, the superpeer whose ID immediately precedes n, and the successor, the superpeer whose ID most closely follows n. Figure 3.3 shows an example of the two-tier VANET/P2P system based on a Chord-based P2P overlay.
21 Vehicular Ad-Hoc Network
Superpeer
Vehicles with both interfaces Vehicles with IVC interfaces
P2P Overlay Network
Figure 3.3: Example of two-tier VANET/P2P system based on Chord.
In the same identifier space, information related to a road segment is associated with a key that can be generated from the location and information-specific parameters. For example, a traffic report of a road segment has a key hashed from the segment ID and a pre-defined value indicating traffic condition as information type. In the Chord overlay, the information with key k is maintained by the successor, which is the first superpeer whose ID is equal to or follows k clockwise around the Chord overlay. Thus, each superpeer is responsible for a subset of keys and the associated information. To share information in such a structured P2P overlay, a superpeer must publish information to the responsible nodes after collecting information in the VANETs.
To maintain finger tables and the P2P overlay, each superpeer periodically performs a stabilization procedure to confirm the entries in its finger table. In addition, when an existing superpeer leaves or a new superpeer joins the P2P overlay, information may need
22
to be updated on the new successors that are responsible for.
3.4 Information Sharing and Retrieval
In VANETs, vehicles cooperatively share their data with nearby vehicles and collect information available in their areas. Each vehicle stores the collected data and information in a local database. According to application-specific requirements, these data may be further processed and analyzed to generate the desired information. The results of analyzed data are retained for a certain period (e.g., a few seconds or minutes), after which they are expired. A user in a vehicle may send an inquiry for information, such as traffic conditions and available services for a specific location (i.e., a specific road segment). Information retrieval in the two-tier VANET/P2P system requires performing lookup queries in both the low-tier VANETs and high-tier P2P overlay network. A lookup message consists of a unique message ID, information regarding the requesting vehicle (e.g., its ID and location), the road segment ID of the destination, the requested information type (e.g., traffic conditions and gas prices), information regarding the forwarding vehicles (i.e., the vehicles that forward the message), and relevant parameters.
3.4.1 Information Lookup in VANETs
In VANETs, an information lookup is performed among vehicles in a hop-by-hop manner until a vehicle storing the requested information for the destination is located. To alleviate the broadcast storm problem, a time-to-live (TTL) mechanism and geographic forwarding scheme are used to forward the lookup message geographically closer to the destination at each hop.
23
lookup forwarding in VANETs. When a vehicle joins the two-tier system, it first determines if it is a superpeer or a normal peer. After the superpeer election process is complete, the vehicle can forward lookups in VANETs when receiving lookups from other vehicles through the VANETs, regardless of which type of peer it becomes. A vehicle ceases to assist in forwarding lookups in VANETs when it leaves the system.
3.4.2 Information Lookup in Unstructured Peer-to-Peer Overlay
In contrast to the lookups in VANETs, only superpeers are responsible for performing lookups in the high-tier P2P overlay. A superpeer may originate a lookup request for information itself or receive a request originated by a normal peer within the same cluster of VANETs. In both cases, the superpeer that initiates a lookup in the P2P overlay is called the initiating superpeer. The lookup procedure performed in the P2P overlay is based on the adopted P2P networking model.In a Gnutella-based P2P overlay, a lookup query is performed based on TTL-limited flooding. When a superpeer receives a query, it first checks if it has the requested information. If the superpeer has the information, it replies to the query. Otherwise, the superpeer decreases the TTL by one and forwards the query to all of its neighbors in the P2P overlay if the TTL is still greater than zero. The forwarding process is repeated until a superpeer storing the requested information is located or the TTL value of the lookup becomes zero. Different TTL values may be used for lookups in low-tier VANETs and in the high-tier P2P overlay.
The geographic positions of road segments are well-defined on a digital map and all vehicles are aware of their own locations. To improve lookup performance, the two-tier system applies a geographic routing mechanism to the lookups in the Gnutella-based P2P
24
overlay. The geographic routing mechanism routes a query to the neighboring superpeers that are close to the road segment in the query. This approach considerably reduces lookup latency and the number of lookup messages compared with the conventional flooding approach.
Vehicle joining and leaving may affect the lookups performed in the high-tier P2P overlay. When a normal peer generates a lookup request, it broadcasts the request in VANETs and also requests its current superpeer to forward the lookup in the P2P overly. When a normal peer joins another cluster group, it turns to another superpeer of the new cluster and asks for assistance with P2P lookup forwarding. Conversely, when a vehicle is elected as a superpeer, it can perform lookups in the P2P overlay after the overlay joining process is complete. When a superpeer becomes a normal peer, the superpeer may still receive P2P lookup forwarding requests from its normal-peer neighbors if the normal peers have not yet updated their new superpeer. To avoid lookup failures, a graceful departure mechanism can be adopted in the P2P overlay. In that case, superpeers continue to handle P2P lookups for a short period after they step down from the role of superpeer.
3.4.3 Information Lookup in Structured Peer-to-Peer Overlay
In a Chord-based P2P overlay, when a superpeer receives a query for information with key k, it first checks whether or not it is responsible for the key. If it has the requested information, it replies to the query with the desired information. Otherwise, the superpeer forwards the query to its P2P neighbor whose ID immediately precedes k in the overlay. This forwarding procedure continues until the query reaches the successor of key k, i.e., the superpeer responsible for the key. Upon receiving the query, the responsible successor replies to the initiating superpeer, and then to the normal peer originating the query if
25 needed.
3.4.4 An Example of Information Retrieval
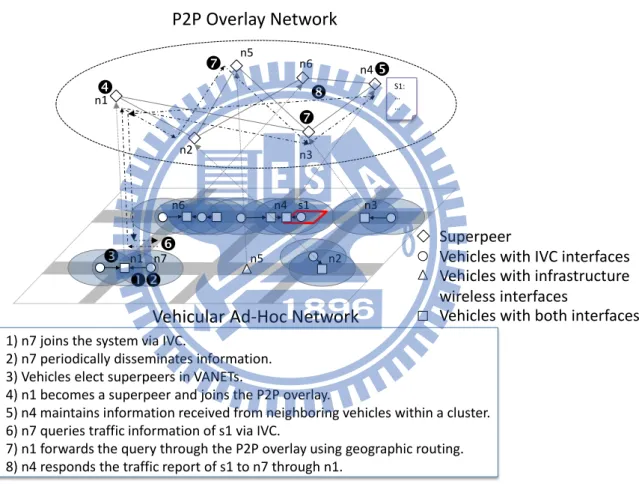
Figure 3.4 provides an example of information retrieval in the proposed two-tier VANET/P2P system based on a Gnutella-based P2P overlay. In this example, a new vehicle n7 which only has an IVC interface wants to join the two-tier system. When joining, n7 first connects to VANETs via its IVC interface in step 1 and starts to disseminate information in step 2. In the VANETs, the distributed superpeer election algorithm is periodically performed in step 3. Once a vehicle which has both IVC and infrastructure-based communication interfaces, say n1, becomes a superpeer, it joins the unstructured P2P overlay in step 4. If n1 is a newly joined superpeer without existing superpeer information, it must connect to the bootstrap node to obtain existing superpeers. After that, n1 randomly connects to n2 and n3 as its P2P neighbors. The superpeers also have to maintain the information they receive from their neighboring vehicles within clusters. For example, n4 maintains information about road segment s1 (e.g., traffic condition) received from vehicles on s1, as in step 5. Moreover, superpeers periodically exchange PING/PONG messages to maintain the P2P overlay. These messages also contain the location of the vehicles, such as GPS coordinates, to enable geographic routing of the queries in the P2P overlay.
To retrieve the information of a particular road segment, a vehicle broadcasts a query in VANETs. For example, if n7 wants to know the traffic information of road segment s1, it first broadcasts the query via its IVC in step 6. If any node in n7’s cluster has the unexpired traffic report for s1, it responds to n7. Otherwise, the query is continually propagated until it is eventually received by the superpeer of n7’s cluster, i.e., n1. The superpeer then
26
forwards this query to other superpeers via the P2P overlay in step 7. This query routing in the P2P overlay is based on the geographic routing mechanism. n1 first sends the query to all of its neighbors in the P2P overlay, i.e., n2 and n3. Then, n2 and n3 select one vehicle which is the node nearest to the road segment s1. n2 and n3 forward the query to n5 and n4, respectively. Finally, the superpeer n4 receives the request and responds to n7 through n1 in step 8.
P2P Overlay Network
Vehicular Ad-Hoc Network
n2 n5 n7 n1 n6 n4 s1 n3 S1: … … V
1) n7 joins the system via IVC.
2) n7 periodically disseminates information. 3) Vehicles elect superpeers in VANETs.
4) n1 becomes a superpeer and joins the P2P overlay.
5) n4 maintains information received from neighboring vehicles within a cluster. 6) n7 queries traffic information of s1 via IVC.
7) n1 forwards the query through the P2P overlay using geographic routing. 8) n4 responds the traffic report of s1 to n7 through n1.
Vehicles with both interfaces Vehicles with IVC interfaces Vehicles with infrastructure wireless interfaces Superpeer n1 n2 n3 n4 n5 n6
Figure 3.4: Example of information retrieval in two-tier VANET/P2P system based on a Gnutella-based P2P overlay.
3.5 A General VANET/P2P System Model
27
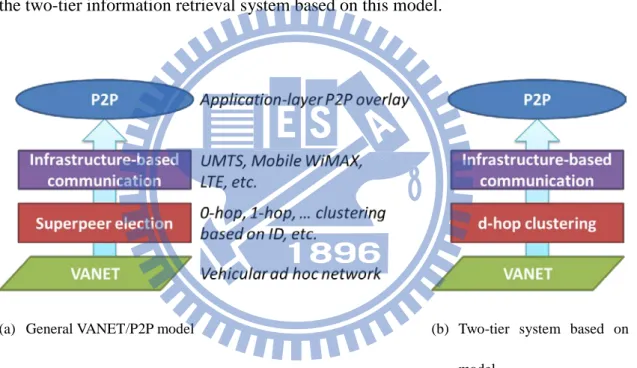
represents a general system model for information retrieval system in a vehicular environment. The general model consists of several layers for design considerations of the information retrieval system. From the lowest level of the model, vehicles can utilize IVC to form VANETs. They may adopt a clustering mechanism based on IDs or other metrics to perform superpeer election. Vehicles can further utilize infrastructure-based communication (e.g., UMTS, Mobile WiMAX, and LTE) if available. Finally, they may organize themselves into an application-layer P2P overlay using either intervehicle or infrastructure-based communication. Figure 3.5 shows the general VANET/P2P model and the two-tier information retrieval system based on this model.
(a) General VANET/P2P model (b) Two-tier system based on the
model
Figure 3.5: A general VANET/P2P model and the two-tier system based on the model.
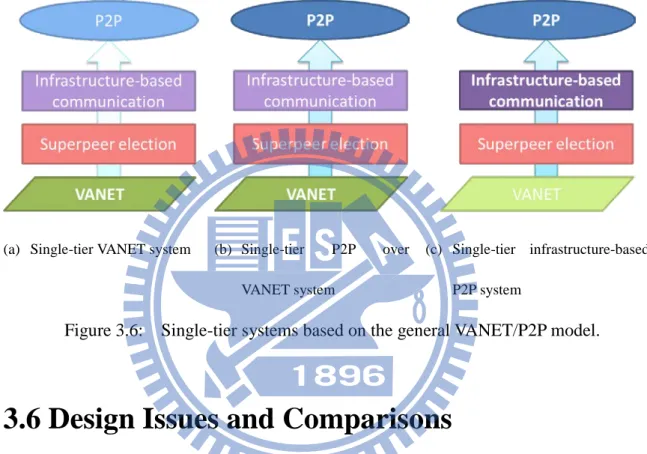
The three single-tier information retrieval systems described in Chapter 2 can also be constructed using the general VANET/P2P model. For the single-tier VANET system, vehicles utilize only IVC to form VANETs. Although they do not perform superpeer election, they can do it if they will. For the single-tier P2P over VANET system, vehicles form VANETs, perform no superpeer election, utilize no infrastructure-based
28
communication, and form a P2P overlay on top of VANETs. For the single-tier infrastructure-based P2P system, vehicles utilize infrastructure-based communication to form a P2P overlay without any usage of IVC and superpeer election. Figure 3.6 shows the three single-tier systems based on the general VANET/P2P model.
(a) Single-tier VANET system (b) Single-tier P2P over
VANET system
(c) Single-tier infrastructure-based
P2P system
Figure 3.6: Single-tier systems based on the general VANET/P2P model.
3.6 Design Issues and Comparisons
This section provides a qualitative analysis of single-tier and the proposed two-tier architectures for realizing information retrieval services in a vehicular environment. A quantitative analysis based on simulation is presented in the next section.
3.6.1 Network Connectivity
To share and retrieve information, vehicles participating in the single-tier systems are required to have either IVC interfaces for VANET and P2P over VANET systems, or broadband wireless network interfaces for infrastructure-based P2P systems. A vehicle
29
cannot access the information retrieval service if it does not support the required communication system. By contrast, the proposed two-tier VANET/P2P system does not impose such a constraint on vehicles. A vehicle with only IVC capability shares and retrieves information in the low-tier VANETs as though it participates in VANET-based systems. Additionally, the vehicle can access the information available in the high-tier P2P overlay through communicating with superpeers via IVC. On the other hand, a vehicle with only infrastructure-based connectivity joins the high-tier P2P overlay where it can retrieve information from other superpeers, which may connect to other vehicles in VANETs using IVC. The proposed two-tier VANET/P2P architecture is more flexible so that it can accommodate vehicles with different wireless communication technologies.
3.6.2 Information Sharing
In both single-tier VANET-based and two-tier VANET/P2P systems, vehicles can broadcast information via IVC to disseminate information in VANETs. A vehicle may derive the desired information based on the information received from other vehicles. For example, in a traffic information system, vehicles periodically broadcast their observed traffic conditions via IVC. As a result, a vehicle can aggregate collected traffic information to generate a traffic report, which is more accurate than that based on a single observation. Information can be disseminated and propagated in a single-hop or multi-hop broadcast manner. Due to the limited bandwidth of VANETs, the single-hop broadcast of information is preferred to avoid overhead of multi-hop broadcasts and broadcast storms.
By contrast, no such information dissemination exists in the single-tier infrastructure-based P2P systems. Each vehicle knows only the information available in the areas it has visited and the information of responsible road segments that the vehicle
30
handles when a structured P2P overlay is adopted. Vehicles cannot directly exchange information even when they are near to each other on a road. A vehicle must publish its information in the P2P overlay to share information with others and perform a lookup in the P2P overlay to obtain the required information.
3.6.3 Information Lookup
In the single-tier VANET system, the lookup for information can achieve a low latency, for example, a few milliseconds, through direct communication between vehicles; but may fail due to network partitioning under low vehicle densities. As the density increases, an increase occurs not only in the connectivity, but also in communication interferences and collisions. Therefore, both the success rate and lookup latency increase when more vehicles participate in the system. An efficient and effective lookup based on multi-hop communication remains a challenge for VANETs.
The single-tier P2P over VANET system integrates the P2P lookup mechanism and VANET routing protocols to perform information lookups in VANETs. With a P2P overlay built on top of the VANETs, the approach inherits the network disconnectivity problem and bandwidth limitations of VANETs. Moreover, the application-layer P2P overlay relies on VANET routing to transmit lookup and maintenance messages over VANETs. When the number of vehicles increases, messages for VANET routing, information lookup, and overlay maintenance are considerably increased in the VANETs. This architecture suffers a scalability problem.
When an application-layer P2P overlay is built through an infrastructure-based network, the lookup performance depends mainly on the adopted P2P approach, regardless of the vehicle density. However, the infrastructure-based wireless communication has a higher
31
transmission delay than direct a hoc communication because of the communication through base stations and core networks. Therefore, lookups in the single-tier infrastructure-based P2P system achieve a high success rate but have long latencies.
In the proposed two-tier VANET/P2P system, lookups for short-distance information can be resolved quickly through the low-tier VANETs, and queries for long-distance information can take advantage of the high-tier P2P overlay to mitigate the network disconnectivity problem. The radio resource of the wireless infrastructure is also limited; therefore, adaptive schemes that perform lookups between the two networks (according to road networks, vehicular mobility, and network conditions) to minimize the lookup overhead over the high-tier P2P overlay need to be further studied. An adaptive lookup protocol for the two-tier VANET/P2P system is proposed and presented in the next chapter.
3.6.4 Peer-to-Peer Overlay Construction
P2P networking technology has been widely utilized to share resources in various systems such as file sharing systems. A P2P overlay can also be constructed among vehicles to provide sharing and retrieval of information in vehicular systems (e.g., traffic information systems). In particular, P2P traffic information systems differ from P2P file-sharing systems in many aspects, including highly dynamic participants, high data update and query rates, and highly correlated queries. These characteristics should be considered when designing P2P traffic information systems. In an unstructured P2P overlay such as a Gnutella-based system, the unstructured P2P overlay could accommodate the frequent changes of network topology. Vehicles collect traffic information, generate traffic reports, and locally maintain traffic reports without publishing reports to other vehicles. By contrast, more efforts are needed in a structured P2P overlay, such as a
32
Chord-based system, to maintain the overlay structure and publish traffic reports to the responsible vehicles.
The traffic conditions along a route to the destination are usually queried simultaneously. By adopting the geographic routing scheme that forwards lookups through an unstructured P2P overlay, the lookup forwarding path approximately follows the route toward the destination. Therefore, fewer lookups are required to obtain the required traffic information. By contrast, an individual lookup must be performed for each road segment in the structured P2P system. Another structured P2P approach, Content Addressable Network (CAN) [27], uses a two-dimensional coordinate space. The lookup routing path in the CAN space would come as close to the route in the road network as the geographic lookup routing in an unstructured P2P overlay. However, the CAN approach still requires considerable overlay maintenance overhead. The above characteristics cause the unstructured P2P approach to be more applicable than the structured P2P approach for the decentralized traffic information systems.
The two-tier system organizes superpeers in a P2P overlay as a hierarchical structure. As a result, the overall maintenance and lookup overheads are reduced because they grow as a function of the number of participants. The hierarchical design improves the scalability and performance of the P2P systems. However, load on superpeers may be high since they provide P2P lookup services to all vehicles. To reduce the load on superpeers and improve the performance of superpeer overlay, further improvements, such as a multi-level hierarchy and superpeer redundancy, are directions for future research.
Finally, Table I summarizes the comparisons of the four architectures for realizing information retrieval services in a vehicular environment.
33
Table I: Comparison of architectures for information retrieval services.
Characteristics System architecture a. Single-tier VANET b. Single-tier P2P over VANET c. Single-tier infrastructure-based P2P d. Two-tier VANET/P2P Network connectivity
Intervehicle Intervehicle Infrastructure-based Intervehicle or
infrastructure-based,
or both
Information
sharing
Broadcast via IVC Broadcast via IVC;
sharing in VANET-based P2P overlay Sharing in infrastructure-based P2P overlay
Broadcast via IVC;
sharing in infrastructure-based P2P overlay Information lookup Multi-hop broadcast in VANETs; lowest latency if success;
success rate and
latency increase with vehicle density P2P lookup in VANET-based P2P overlay; performance worse than single-tier VANET P2P lookup in infrastructure-based P2P overlay; high
success rate and
latency; performance depends on P2P networking approach Multi-hop broadcast in VANETs with superpeer lookup in infrastructure-based P2P overlay; good balance between
success rate and
latency
P2P overlay
construction
None Overlay built on
top of VANETs Overlay in infrastructure network Superpeer-based overlay in infrastructure network
34 P2P system overhead None Overhead to maintain P2P overlay Overhead to maintain P2P overlay Less overhead to maintain superpeer-based P2P overlay Challenges Network disconnectivity; broadcast storm Network disconnectivity; VANET routing overhead Limited bandwidth; long delay Superpeer election; superpeer load; redundant lookups
35
3.7 Performance Evaluation
The performance of single-tier systems and the proposed two-tier VANET/P2P system is evaluated using a traffic simulator and network simulator. This section presents simulation results and discusses them.
3.7.1 Setup
We use the micro-scope road traffic generator, Simulation of Urban MObility (SUMO) [28], to generate vehicular mobility traces that are then fed into the network simulator, QualNet [29]. The road topology is a 5000 m × 5000 m grid road network, in which each road segment is 500 meters with two lanes in each direction. The maximum vehicle speed is set to 13.9 m/s (i.e., 50 km/h). The number of vehicles varies from 200 to 1000. Each vehicle is equipped with both intervehicle and infrastructure-based wireless communication interfaces. The vehicular network uses IEEE 802.11a with the lognormal shadowing, two-ray path loss, and Rayleigh fading. The radio range is set to 250 meters. We assume that the high-tier infrastructure-based wireless network is Mobile WiMAX or UMTS which can provide a reliable communication between vehicles.
In VANETs, vehicles periodically broadcast messages to exchange information with neighboring vehicles for information sharing in both single-tier and two-tier systems, and superpeer election in only two-tier system. We use a traffic information system as an example of the information retrieval service. Each vehicle broadcasts its current speed and location, and then generates the traffic report of its current road segment based on its observation and traffic messages obtained from other vehicles. In two-tier VANET/P2P system, vehicles perform superpeer election every one second to form clusters. The cluster size is set to one hop. The TTL value for lookups in the VANETs is infinite so that all
36
connected vehicles in the VANETs could receive the lookup queries. These settings help us to understand the net improvement by introducing a high-tier P2P overlay.
Gnutella and Chord are used as the representative unstructured and structured P2P overlay networks, respectively. In the Gnutella-based P2P overlay, each node maintains 15 neighbors, and the geographic routing mechanism is applied to perform P2P lookups for information with a TTL value of seven. In the Chord-based P2P overlay, the identifier space is set to 215. Each node maintains a finger table with 15 entries. In both P2P overlays, the stabilization procedures are performed every ten seconds to maintain the overlays. We simulate each scenario for 200 seconds and ten runs.
In all scenarios, the P2P over VANET architecture performs more poorly than the single-tier VAENT architecture with a success rate below 20% and lookup latency over 100 ms. Results of the P2P over VANET architecture are excluded from the comparisons in the figures below. Therefore, we consider five different design strategies among the other three system architectures: the single-tier VANET approach (1T-VANET); the single-tier infrastructure-based P2P approach using Chord (1T-struct); the single-tier infrastructure-based P2P approach using Gnutella (1T-unstruct); the two-tier approach using Chord (2T-struct); and the two-tier approach using Gnutella (2T-unstruct). We evaluate their performance in terms of lookup success rate, lookup latency, VANET bandwidth usage, and P2P overlay bandwidth usage, defined as follows.
• Lookup success rate is defined as the ratio of the number of successful lookups to the total number of lookup requests generated by vehicles. A lookup is successful if a requesting vehicle can receive responses containing the required information.
• Lookup latency is the average latency for a successful lookup. It measures the elapsed time between the time that a lookup request is generated and the time that the corresponding response is received by the requesting vehicle.
37
• VANET bandwidth usage measures VANET bandwidth used for lookups performed in VANETs.
• P2P overlay bandwidth usage measures infrastructure network bandwidth used for lookups and overlay maintenance performed in a P2P overly.
3.7.2 Results
Figure 3.7 shows the lookup success rate under different number of vehicles. This figure shows that the single-tier VANET system has the lowest lookup success rate, especially in low density scenarios. This is because some lookups cannot reach the vehicles with the requested information in the disconnected VANETs. This problem can be alleviated by increasing the number of vehicles or introducing an infrastructure-based P2P overlay.
Both single-tier structured P2P and unstructured P2P systems significantly improve the lookup success rate because an infrastructure network does not have the disconnectivity problem and vehicles can communicate with any other vehicles through infrastructure-based communication. For the single-tier P2P systems, lookup success rate is independent of vehicle densities, and incorrect neighbor or finger information on P2P nodes is mainly caused by churn (i.e., node join/leave), resulting in lookup failures. Simulation results show that the churn has an impact on the structured P2P approach. Although the churn problem can be alleviated by frequently performing stabilization procedures to maintain a stable structured P2P overlay, these frequent stabilization procedures introduce extra maintenance overhead. On the other hand, the unstructured P2P approach adapts to churn much more effectively than the structured P2P approach in a dynamic vehicular network, as the single-tier unstructured P2P system achieves nearly a 95% lookup success rate.