國立交通大學
電控工程研究所
碩 士 論 文
以深度影像為基礎之健身器材輔助系統設
計
The Design of Fitness Equipment Assistant System
Based on Depth Images
研 究 生 :鄭植諺
指導教授: 林昇甫 博士
以深度影像為基礎之健身器材輔助系統設計
The Design of Fitness Equipment Assistant System Based on
Depth Images
研 究 生 :鄭植諺
Student: Chih-Yen Cheng
指 導 教 授 :林昇甫 博士
Advisor: Dr. Sheng-Fuu Lin
國立交通大學
電控工程研究所
碩士論文
A Thesis
Submitted to Institute of Electrical Control Engineering College of Electrical Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering July 2012
以深度影像為基礎之健身器材輔助系統設
計
學生:鄭植諺
指導教授:林昇甫 博士
國立交通大學電控工程研究所
摘要
隨著社會的發展,越來越多人使用健身器材當成主要的運動方式。而健身器 材的使用過程中,常需要健身教練的幫助來正確的使用器材。然而,由坊間的健 身中心的發展來看,使用者的成長速度卻快於健身教練的增加速度。有鑑於此, 本論文以比較不易受環境因素影響的深度影像為基礎,建立一個健身器材的即時 輔助系統。希望透過一即時的使用者畫面回饋系統,讓健身器材的使用者,能在 使用健身器材的同時,同步的接收到本論文輔助系統的姿勢建議。經過本論文的 實際實驗測試後,本輔助系統不僅可以讓健身器材的使用者預防受傷,也更進而 達到增進使用健身器材的效率。 本論文的主要貢獻:第一,在本論文建立一個非接觸式裝置之深度影像為基 礎的即時視覺輔助系統。改善過去因環境光線的影響資料影像的缺點。第二,此 系統被創新的運用於健身器材的輔助之上,並且利用獲取使用者空間中三維的位 置資訊,進而改善健身教練過去因為人眼視角的限制而忽略的姿勢糾正錯誤。The Design of Fitness Equipment Assistant System
Based on Depth Images
Student: Chih-Yen Cheng Advisor: Dr. Sheng-Fuu Lin
Institute of Electrical Control Engineering
National Chiao Tung University
ABSTRACT
More and more people use the fitness equipment to replace of regular exercises. And the equipment users often need the help of the fitness trainers to modify their pose. However, the pace of the gain in the number of fitness trainers is much slower than that in the number of users. In this paper, we build a real-time fitness equipment assistant system which is based on the depth image. We hope the equipment users can receive some real-time post modification feedback through this instant feedback system while they are using the equipment. And that is designed not only to prevent the sport injuries, but to reach the higher efficiency of the equipment usage.
The following are contributions of this paper. First, we use a non-contact measurement equipment to get the depth image data and that for building a real-time feedback system and that improve the weakness of traditional color image. Second, this system is applied to the assistant system of the fitness equipment innovatively. This system is also designed to improve the mistakes which are caused by the fitness trainer's carelessness resulted from the limit of human eyes.
誌謝
首先我要以最誠摯的謝意,感謝指導教授林昇甫博士。感謝老師在研究上的 指導與啟迪,以及老師細心的校閱本論文的謬誤之處。並感謝口試委員王安平教 授與徐永吉博士在工作繁忙之中,不辭辛勞的指導學生的論文。也要藉此感謝張 振興教練與康雅文教練,謝謝他們在本論文進行實驗時,給予我很大幫助。同時 也要感謝實驗室的學長,啟耀、逸章、俊偉與裕筆;以及一起共同奮鬥的同學婷 婷、俊良、柏宏與實驗室的學弟妹雅君、炳晟、明揚、衍橙與兆傑。謝謝他們在 這一路上的協助與討論,讓我在研究的過程中面對問題時,總是有人可以討論與 分享,也謝謝他們在日常生活中一直以來的精神支持。 最後感謝家中摯愛的父母與姊弟,感謝他們在我所有的求學的過程中給予我 最強大的後盾,讓我能在求學的過程中,能無慮且順利的完成學業。目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 圖目錄 ... vi 表目錄 ... ix 第一章 緒論 ... 1 1.1 研究背景 ... 1 1.2 研究動機 ... 5 1.3 相關研究之探討 ... 6 1.4 論文架構 ... 7 第二章 相關技術 ... 8 2.1 深度影像成像原理 ... 8 2.2 人體骨架特徵 ... 9 2.2.1 骨架特徵分析 ... 9 2.2.2 決策樹 ... 13 2.2.3 多重臨界值法 ... 15 2.3 健身器材介紹 ... 17 2.4 人體尺寸相關資訊 ... 20 第三章 系統流程 ... 23 3.1 整體系統架構 ... 23 3.2 影像前處理 ... 243.4 使用者介面 ... 30 3.5 姿勢修正標準 ... 32 3.5.1 姿勢修正標準流程 ... 33 3.5.2 肩推機 ... 36 3.5.3 蹲舉架 ... 40 3.5.4 啞鈴後推 ... 42 第四章 實驗結果 ... 45 4.1 實驗機制 ... 45 4.1.1 實驗設備 ... 45 4.1.2 實驗介面 ... 46 4.1.3 實驗對象 ... 47 4.1.4 受測者資料 ... 48 4.1.5 評估系統效能 ... 49 4.2 實驗結果與分析 ... 49 4.2.1 蹲舉架器材實驗結果 ... 50 4.2.2 肩推機器材實驗結果 ... 51 4.2.3 啞鈴器材實驗結果 ... 52 4.3 實驗結果討論 ... 53 4.3.1 健身器材特性 ... 54 4.3.2 體型因素 ... 54 4.3.3 穿著因素 ... 56 4.3.4 整體系統結論 ... 57 第五章 結論與未來展望 ... 58 參考文獻 ... 60
圖目錄
圖 1.1 常見健身器材。(a) 肩推機;(b) 大腿推蹬機。 ... 2
圖 1.2 器材及其使用說明。 ... 2
圖 1.3 人體彩色影像。 ... 3
圖 1.4 人體三維深度影像。 ... 4
圖 1.5 微軟 Kinect。(a) Kinect 全貌圖;(b) Kinect 相機。(http://www.xbox.com) ... 5 圖 1.6 擷取影像範例。(a) 彩色影像擷取示意圖;(b) 深度影像擷取示意圖。 . 5 圖 1.7 車椅墊壓力分佈分析。(http://www.lifefitness.com) ... 7 圖 2.1 深度影像。 ... 8 圖 2.2 人體部位關係圖。 ... 10 圖 2.3 不同距離下特徵表示圖。 ... 11 圖 2.4 特徵示意圖。(a)
1結果;(b)
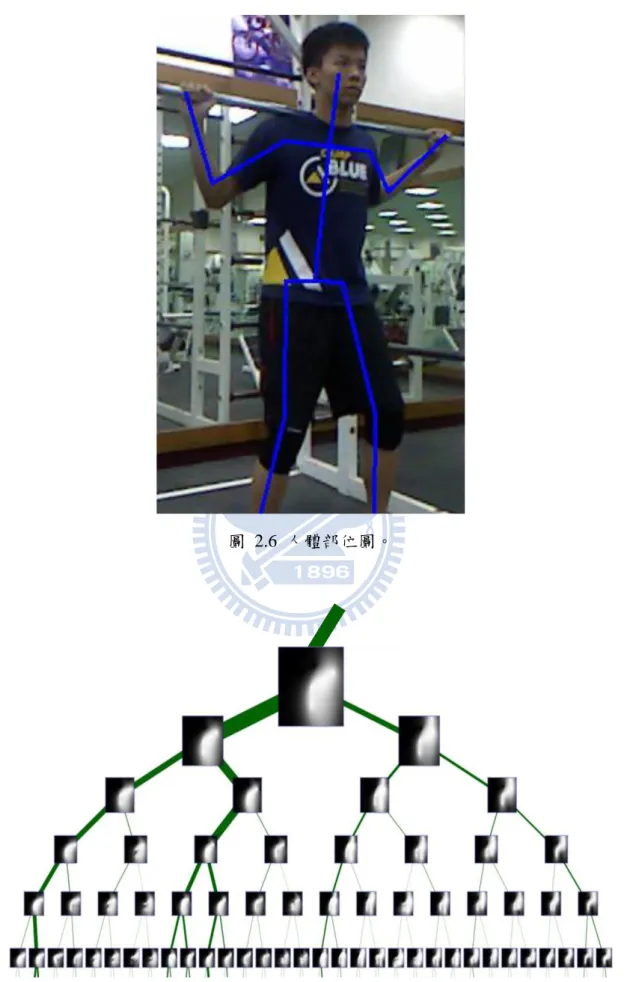
2結果。 ... 12 圖 2.5 決策樹運算分類結果。 ... 13 圖 2.6 人體部位圖。 ... 14 圖 2.7 決策樹結果示意圖, ... 14 圖 2.8 場景資訊。 ... 16 圖 2.9 深度資訊直方圖。 ... 16 圖 2.10 分割結果。 ... 17 圖 2.11 綜合訓練器。(http://www.tifit.cn) ... 18 圖 2.12 划船器。(http://zh.wikipedia.org/wiki) ... 18 圖 2.13 彈簧腕力器。 ... 19 圖 2.14 臥推示意圖。(http://zh.wikipedia.org/wiki) ... 20圖 2.16 站姿圖。(a) 站姿正視圖;(b) 站姿側視圖。(http://www.iosh.gov.tw) 21 圖 2.17 坐姿側視圖。(http://www.iosh.gov.tw) ... 22 圖 3.1 整體流程圖。 ... 24 圖 3.2 相機架設示意圖。 ... 25 圖 3.3 前處理流程圖。 ... 26 圖 3.4 使用者位置圖。 ... 26 圖 3.5 前處理示意圖。(a) 未經過前處理;(b) 前處理結果。 ... 27 圖 3.6 人體深度影像I。 ... 28 圖 3.7 人體深度影像
I x 位置示意圖。 ... 29, 圖 3.8 人體深度影像骨架結果。 ... 29 圖 3.9 使用者骨架偵測流程圖。 ... 30 圖 3.10 使用者介面流程圖。 ... 31 圖 3.11 深度遠近示意圖。 ... 32 圖 3.12 骨架顯示圖。 ... 32 圖 3.13 使用者姿勢錯誤示意圖。 ... 34 圖 3.14 使用者介面畫面。 ... 34 圖 3.15 姿勢修正標準流程圖。 ... 35 圖 3.16 輔助系統未啟動畫面。 ... 35 圖 3.17 肩推機椅座調整機構。 ... 36 圖 3.18 肩推正確動作。 ... 37 圖 3.19 肩推錯誤動作。 ... 37 圖 3.20 三角肌。(http://zh.wikipedia.org/wiki) ... 38 圖 3.21 肩推動作系統啟動條件。 ... 38 圖 3.22 人體部位圖。(http://zh.wikipedia.org/wiki) ... 39 圖 3.23 肩推機輔助畫面。 ... 39圖 3.24 蹲舉架預備姿勢。 ... 40 圖 3.25 蹲舉正確姿勢。 ... 41 圖 3.26 蹲舉錯誤姿勢。 ... 41 圖 3.27 訓練肌群。(a) 股四頭肌;(b) 臀大肌。(http://zh.wikipedia.org/wiki) . 42 圖 3.28 蹲舉架輔助畫面。 ... 42 圖 3.29 啞鈴後推預備姿勢。 ... 43 圖 3.30 啞鈴後推錯誤姿勢。 ... 44 圖 3.31 啞鈴後推動作輔助畫面。 ... 44 圖 4.1 實驗設備。 ... 46 圖 4.2 使用者介面。 ... 46 圖 4.3 蹲舉架。 ... 47 圖 4.4 肩推機。 ... 48 圖 4.5 啞鈴。 ... 48 圖 4.6 蹲舉架輔助失敗情況。 ... 50 圖 4.7 肩推機輔助失敗情況。 ... 52 圖 4.8 啞鈴後推輔助失敗情況。 ... 53 圖 4.9 蹲舉架實驗情形。(a) 系統誤判;(b) 系統正確判斷。 ... 55 圖 4.10 受測者編號 3。 ... 56
表目錄
表 2.1 常用的站姿計測尺寸(單位:mm) ... 21 表 2.2 常用的坐姿計測尺寸(單位:mm) ... 22 表 4.1 受測者資料 ... 49 表 4.2 蹲舉架輔助系統實驗結果 ... 50 表 4.3 肩推機輔助系統實驗結果 ... 51 表 4.4 啞鈴後推輔助系統實驗結果 ... 52第一章 緒論
本論文的主要目的為提出一套三維影像輔助系統,希望透過一結合三維影像 資訊與彩色影像的人體骨架追蹤系統,針對市面上常見之健身器材,進行健身器 材使用情形的即時輔助系統。此系統希望能改善坊間的健身中心健身教練普遍不 足的情況,而取而代之的是利用本論文中的輔助系統,提供使用者一個器材使用 狀況的警示系統介面,讓健身器材的使用者可以透過畫面上的修正資訊,來達到 最佳的健身效果。另外也更可提醒使用者器材,避免使用時可能造成的運動傷害。 在本章的 1.1 節將介紹研究的背景知識。於 1.2 節中會敘述本研究的研究動 機。而 1.3 節中將說明與本論文相關的研究知識。最後在 1.4 節中則闡述,本論 文的架構。1.1 研究背景
由於工業社會的快速發展趨勢,現代人一方面因為越來越多的工作朝向電腦 化的發展而減少了室外運動的機會,然而,越來越多越多研究顯示運動對於重視 身體健康的重要性。因此,運動場地與運動時間較不設限的室內健身器材,在近 年來逐漸發展成一個相當大的運動主流。而隨著大家愈趨了解運動對於健康的好 處,大家在使用健身器材時,多是希望能藉由現代科學發展下的健身器材,且在 一個不受天候影響的運動場地,進行健身訓練。常見的運動器材如圖 1.1。然而, 在使用健身器材進行訓練時,因為健身器材本身的設計並無法考量到所有的使用 者,因此,當使用者在使用健身器材時,一方面使用者在使用器材前會閱讀器材 說明書,如圖 1.2,另一方面則多會到坊間健身中心諮詢專業的健身教練,進行 更有效率的健身運動。並希望在教練的指導下,避免可能的運動傷害。然而坊間 的健身中心裡,考量到營運的因素,並不一定常有足夠的教練人數以應付越來越多的使用者。而這情況,就可能使得健身器材的使用者,因為器材使用姿勢的不 正確,進而導致健身器材所應有的健身效果的不足,或更可能因為長期姿勢錯誤 的使用下而造成運動傷害。 (a) (b) 圖 1.1 常見健身器材。(a) 肩推機;(b) 大腿推蹬機。 圖 1.2 器材及其使用說明。
本論文主要使用三維影像資訊為基礎來進行畫面中的人體骨架分析,本論文 採用三維影像的理由是由於,在傳統的彩色影像中,因為拍攝角度的不同,或拍 攝環境的設置不同,如光線強弱的影響,可能會造成不同的影像輸出,而且在進 行人體骨架分析時,所需要的人體骨架資訊,多是人體在真實環境中的絕對角度, 並不是如傳統的彩色影像中,經過畫面投影過的結果。因此,如果選用三維影像 資訊來進行分析[1],就可以免除拍攝角度的問題。如圖 1.3 中,從彩色影像的 結果分析來看,此畫面中手臂得出的角度為 110 度,但是如果隨著人面對相機的 角度有所改變,而從另一角度拍攝同一動作的結果,影像分析卻會得到不同的角 度。這常需要透過相機的校正[2],來經過轉換後取得真實的絕對角度或位置。 但是如果使用三維影像,如圖 1.4,即使在不同角度拍攝,但是因為所得取到的 資料皆是空間中的位置資訊,透過三維影像的座標點分析,就可以直接找出手臂 的角度。而不用透過一連串的繁複轉換,就能達到絕對角度的量測。 圖 1.3 人體彩色影像。
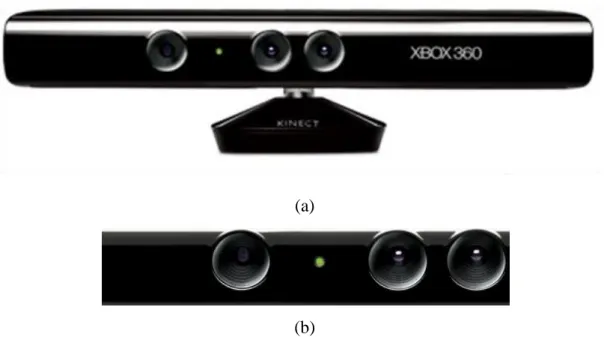
圖 1.4 人體三維深度影像。 而實驗中所使用的三維影像是取自微軟公司所生產的 Kinect,如圖 1.5,來 進行三維影像資料的獲得。由微軟的所提供的硬體資料,此設備在 1.2 ~ 3.6 公 尺有最佳的資料精準度。Kinect 的深度感應器主要是包含一個紅外線發射器與一 深度感測器。產生影像資料步驟是首先讓裝置發出脈衝光,並且在發射處接收目 標物的反射光,藉由測量時間差算出目標物的距離。量測出的影像如圖 1.6,而 就因為是使用紅外線來進行資料的量測,因此 Kinect 可應用在與人相關的場景 偵測上。而另一方面 Kinect 本身也有提供傳統 RGB 影像的鏡頭,因此可將場景 中的彩色影像與三維影像一併的記錄下來。
(a)
(b)
圖 1.5 微軟Kinect。(a) Kinect全貌圖;(b) Kinect相機。(http://www.xbox.com)
(a) (b) 圖 1.6 擷取影像範例。(a) 彩色影像擷取示意圖;(b) 深度影像擷取示意圖。
1.2 研究動機
在過去的影像分析技術當中,多是使用以傳統彩色影像為基礎,藉由進行分 析[3][4]。然而,雖然這些方法在光源不足的情況下,其應用性仍有待加強。本 論文希望能提供一個結合傳統彩色影像與深度影像的一套健身器材的輔助系統, 並提供一個即時的畫面回饋系統,讓健身器材的使用者能透過這套輔助系統,來 達到最有效率的健身運動。也希望能透過本輔助系統,來達到協助健身教練進行1.3 相關研究之探討
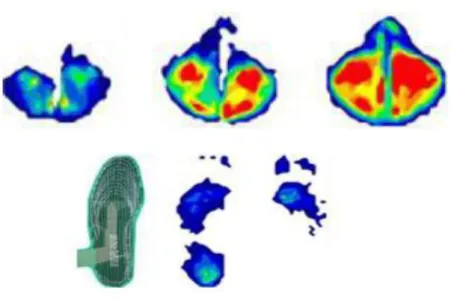
健身器材的初始的構思主要著重在兩大要點,其一是健身器材在室內使用的 使用,而不受到天候因素的影響,另一重點則是居家的使用下可較不受時間及外 在環境因素的限制。而在健身器材機構的設計上講求的則是器材的安全性、實用 性與方便性。而在與使用者切身相關的安全性設計上,主要的重點就是希望藉由 機構的設計,在符合人體動作的條件下,達到避免受傷的設計。而這類的相關設 計上,多是以限制機構運動區域的方式,來達到保護使用者的要求。然而,這類 型的機構設計,只能被動的指導使用者使用,卻無法徹底的使健身器材的使用者, 達到器材最正確的使用效率。在健身器材的使用上,常常會有肌肉部位訓練錯誤, 或是因為長期手臂伸展角度錯誤而導致永久性的關節傷害的情況發生。因此,為 了讓使用者能更正確的使用健身器材,受過專業訓練的健身教練,就迎運而生。 健身教練能依據每位使用者體型的不同,給與不同使用者更細部的姿勢建議。例 如:由於每人的身高及手臂的比例都有些許差異,因此我們在調整健身器材的椅 座高度時,都會詢問專業的健身教練,考慮專業的意見後,做出適當的調整。 而隨著科技的發展,近年來運動科技,逐漸的朝向結合人機介面的方向發展。 希望能藉由科技的發展,使得健身器材的設計上,更達到符合舒適性、人性化及 運動傷害預防的成效。 人機介面的部份,目前有健身車椅墊壓力分佈分析技術,如圖 1.7,其透過 分析使用者臀部與座椅接觸的壓力,分析使用者的使用舒適度,提供使用者進行 調整的參考值。然而,此介面固然可以達到使用者使用情形的分析,但缺點是本 系統為一接觸式輔助系統,使用者必須與量測壓力的儀器進行接觸,本系統在使 用上會比非接觸式的量測來的繁複,而且在儀器的製造與維護上,也比非接觸式 的系統來的繁雜。圖 1.7 車椅墊壓力分佈分析。(http://www.lifefitness.com)
1.4 論文架構
本論文主要提出一以三維影像為基礎之健身器材輔助系統。本篇論文主要分 為五大章節,第一章節介紹研究背景、研究動機與健身器材的發展沿革。接下來 第二章節,主要介紹本論文中,使用的相關技術與理論。第三章節,其論述本論 文所建立的輔助系統架構。第四章節為實驗部分,實驗的詳細建立與分析會在此 章節詳細說明。最後的第五章節則為結論與未來展望。 本論文的貢獻如下: 1. 建立一個以深度影像為基礎的即時視覺輔助系統。且本系統在使用上不需任 何的接觸式裝置,另一方面並使用深度影像,可改善過去因為光線不足等傳 統影像缺點。 2. 本論文的影像輔助系統創新的運用於健身器材使用的輔助上,可提供一套讓 健身教練進行訓練健身學員的輔助工具。更透過獲取使用者空間中三維的位 置資訊,進而改善健身教練因為人眼視角的限制而忽略的姿勢糾正錯誤。第二章 相關技術
本章節將依序介紹本論文中,所使用到的相關技術與原理。在 2.1 節中,將 說明所使用到的深度影像的成像原理。2.2 節將闡述本論文使用的人體骨架特徵。 2.3 中則介紹目前市面上的健身器材的發展。最後於 2.4 節講解本論文中使用到 的人體尺寸相關資訊。2.1 深度影像成像原理
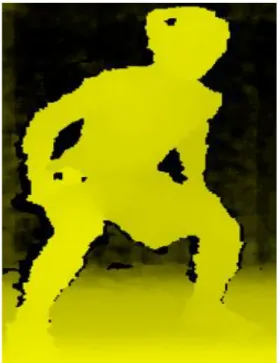
本論文使用微軟之 Kinect,以取得分析之深度影像。在過去得到深度影像的 方式大多藉由計算出攝影機發出的光線在空間中飛行的時間,來量測出待側物與 攝影機的距離。稱之為飛行時間技術(time of flight)。而別於過去的飛行時間技術, 此體感裝置的深度量測技術主要是經由 Light Coding 技術理論[5]。此技術使用近 紅外光針對空間中的物體,進行定位。此技術靠的是 PrimeSence 公司所開發的 Laser Speckle 雷射光散斑。當此散般照射到物體上時,會在空間中產生反射的節 點。而 Light Coding 技術即是利用這些空間中經過標記的反射節點對測量的空間 進行編碼。而在透過紅外線的攝影機記錄下這些點。最後透過內建的晶片得到具 有三維深度資訊的深度影像,如圖 2.1。 圖 2.1 深度影像。2.2 人體骨架特徵
本節中將依序介紹人體骨架與分析相關的特徵與概念。2.2.1 小節中,將介 紹骨架特徵的分析。接著將在 2.2.2 小節中,將介紹此骨架特徵所搭配使用的決 策樹概念。最後於 2.2.3 小節中,提及本論文使用骨架特徵所選用的多重臨界值 法的相關理論。2.2.1 骨架特徵分析
在本篇論文中,為了讓此輔助系統能達到即時回饋的輔助介面,因此在選用 人體的骨架特徵辨識時,必須考慮特徵運算的即時性。因此,本論文中使用 [6][7][8]之特徵,其中的特徵如(2-1)式之一具有運算效率的特徵。特徵的運算如 下:
, I
I
I I u v f I x d x d x d x d x (2-1) 其中,d x
I( )
是影像I 中的x位置,位置的深度值。而變數
u v, ,指的是偏 移向量u和另一偏移向量v。此特徵是利用人體部位的特性,藉由人體各身體部 位的與鄰近部位的相互關係來定義各身體部位。如參考文獻[6]中,如圖 2.2,可 看出以人體手腕的部位為基準,向水平與垂直兩偏移向量尋找,可得出此手腕部 位鄰近兩偏移向量的其他身體部位皆為身體上半軀幹的人體部位,如頭部或胸部。 較少情況為小腿或腳踝等其他人體部位。因此可藉由判斷基準像素點的鄰近像素 點的關係來判斷出此基準像素點是為人體的哪個部位。此特徵中的偏移向量u和 另一偏移向量 v 就是用來描述以人體某一身體部位為基準,與鄰近兩偏移位置的 方向。如圖 2.3 中的2,即是描述以基準點的畫素位置,向兩個互相成 100 度的 兩個偏移向量的鄰近像素位置的相互關係。圖 2.2 人體部位關係圖。 而因為三維深度影像,亦存在物體大小不變性的問題,但此問題深度影像中本身 的特性中,就可以知道空間中物體與相機的實際距離,因此可以容易的利用深度 的資訊達到物體不變性。(2-1)式中的
1 I d x 就是讓此特徵藉由修正偏移量u和v, 來達到大小不變性的運算。以圖 2.3 為例,在同一視角且同一物體,但不同遠近 大小的深度圖的呈現上,得到的f
會是相近的值。因此在同一物體的情況下,不 管距離的遠近,所得到的特徵f
並不會因為距離的遠近而差異過大。在圖 2.3(a) 與(b)顯示出同一物體不同距離下,所對應到的特徵f
。1 2 1 2 圖 2.3 不同距離下特徵表示圖。 而特徵代表性可由圖 2.4 為例,圖中表示兩個不同的情況下,所對應的
f
結果。可以明顯的看出, 1 f 主要是一個描述x像素上方物件的特徵。而如果當x 位置位於如圖(a)中,在人體的上半部,則會得到一個很大的 1 f 值。如果x如圖(b) 是在人體的軀幹部分,則 1 f 會得到一個近似 0 的值,由此可看出
1是一個當輸 入的x位置在身體上半部,會有大的 f 值,而輸入的x位置在身體下軀幹時,會 有一極小的 f 值。而如果看到另一
2對應的 2 f ,此
2就是一個可以容易定義出 如手臂或是膝蓋等部位像素的特徵。因為此情況的θ 會描述出有角度彎曲的人體 部位。1 2 (a) 1 2 (b) 圖 2.4 特徵示意圖。(a)
1結果;(b)
2結果。2.2.2 決策樹
為了讓 2.2.1 中的特徵能夠更強健的描述每個像素所代表的人體部位,此處 參考[9]採用一訓練決策樹。決策樹在[10][11]中被證明是一個能提供快速分類且 有效率進行結果分析的分類工具。在[12][13][14]中也利用決策樹進行快速且有效 率的分類。藉由離線輸入訓練的樣本,得到一如圖 2.5 的決策樹運算分類結果, 來提高此特徵運算的效率與準確性,圖中的( I , x)代表影像 I 中的 x 像素。經過 決策樹的方式可以讓此特徵在使用上除了不用經過前處理的步驟外,更可以簡單 又快速的定義出像素 x 所代表的人體部位。而決策樹都必須經過資料訓練,如[6] 中所訓練出的決策樹共使用一百萬張影像,進行決策樹的建立。 (I , x) 圖 2.5 決策樹運算分類結果。 此方法不同於過去著重追蹤的方式來找出資料中的人體,而取代的是,以像素為 個別單位定義出每個像素可能的人部位。如[6]中的圖 2.7 即為利用此方法所能 分辨出的決策樹結果示意圖,圖中的每個節點中的圖代表決策樹執行到此節點時, 最符合的人體部位的像素深度之分佈情況。可看出越下層的決策樹節點可分辨出 越細部的人體部位之像素。以此方法得出的人體部位辨識結果如圖 2.6。圖 2.6 人體部位圖。
而決策樹訓練的步驟如下: 1. 在指定每個決策樹中之節點參數時,先隨機產生決策樹節點參數
, , 為 2.2.1 小節中提到的特徵偏移向量。 為決策樹分類的依據閥值。 2. 令影像I中的某個 x 像素點表示為Q
I x,
,並將上個步驟得到的參數 進行決策運算:
, | ,
left Q I x f I x
, | ,
right Q I x f I x 3. 根據這個分類結果,利用湘農熵(Shannon entropy)運算出最佳的分割方式。 在[9][15]中,其介紹湘農熵能描述一訊息量的資訊分布情況。在資訊理論中,湘 農(Shannon)將資訊定義為一連續編碼值描述出的訊息空間。亦即資訊為訊息空 間中所有隨機變數在一機率空間下,被一連串連續編碼值所描述出的結果呈現。 而當此訊息空間所描述出的連續編碼序列越大,代表資訊的亂度越高。因此可利 用湘農熵計算出每個時刻下訓練出的決策樹是否達到最大的分類情況。此時就可 以找出決策樹中每個節點對應的最佳參數,以供快速分類。 而決策樹執行的步驟如下: 1. 每個節點包含一個 f與一閥值 。 2. 當輸入影像I的 x 畫素位置資料
I x 輸入進行判斷時 , 當 f
I x, 往左子節點 其餘情況 往右子節點 3. 當達到決策樹底部,即完成運算。2.2.3 多重臨界值法
由於真實影像中的場景資訊,多為複雜場景。因此在場景的分析上,必須透過,適當的處理或條件限制,將如圖 2.8 中的複雜場景資訊,從一個多物體資訊 的場景,分割成前後景資訊。 圖 2.8 場景資訊。 在深度影像處理中,由於對於環境中各物體與相機的資訊為已知,因此常可 利用臨界值法來分割影像的場景,[16]針對深度影像中的數據進行分析,找出物 體適當的深度資訊臨界值。可表示成(2-2)式。H表示整張直方圖,ri代表H 中 第i個區間準位,而h r 代表第
i i個區間準位的直方圖。並依據此臨界值,將場 景中的資料分成目標物體與背景資訊。而臨界值的尋找方式,最常使用統計上的 直方圖,來找出統計影像中的各深度的像素數目。如圖 2.9 為圖 2.8 場景中。各 深度值的個數直方圖。圖 2.10 為圖 2.8 場景中部分分割結果。
1, ,1 b
, i ( )i H h h h h h r (2-2) 圖 2.9 深度資訊直方圖。 深度值 畫 素 個 數 值 0 1000 2000 3000 4000 5000 6000 0 100 200 300圖 2.10 分割結果。 接著藉由不同的分割所需情況,來找出場景直方圖中的適當臨界值來進行臨界值 法的場景分割。使影像可以找出目標物體,以利進行分析。然而若尋找的臨界值 數目不只一個,則稱之多重臨界值法(multilevel thresholding)。在本論文的使用中 將以深度影像為基礎,針對場景影像中的像素值分布變化。得出一個適用於此輔 助系統的多重臨界值,針對場景中的資料進行快速的分割。
2.3 健身器材介紹
市面上的健身器材種類將近幾百種,且在各家生產廠牌的差異下,也造成器 材樣式的多元化。但依據坊間的分類[17][18],大致上可分為三種類型: 1. 全身性健身器材:如同綜合訓練器與家用多功能健身器。 此類型的器材,如圖 2.11,大多可以提供多人同時在器械上進行不同身體部位 的選擇性健身動作。這類的健身器材,由於設備的體積較其他類型的大,但功能 較為齊全且多元。由於價格高的因素,大多適合坊間的健身中心或大型機關使 用。圖 2.11 綜合訓練器。(http://www.tifit.cn) 2. 局部性健身器材:如划船器、樓梯機、蹲舉架、握力器…等等。 此類別的器材,如圖 2.12,屬於單項訓練器械。相較於多元的全身性器材,此 類器材的結構較於簡單,體積也較小,有部分器材更有摺疊收納的設計。此類的 健身功能相對單一,著重於局部身體肌群的鍛鍊。而大多以配重砝碼或液壓拉缸 為重載的使用設計,可以提供使用者,依據健身的熟練度與個人身體的承受度, 自行調整運動量。因此局部性健身器材是很受歡迎的健身器材類型。 圖 2.12 划船器。(http://zh.wikipedia.org/wiki)
3. 小型健身器材:如家庭中最常見的啞鈴、曲餅槓鈴、彈簧拉力器…等等。 此類型的器材設計上著重體積小巧輕便,如圖 2.13。但體積雖小,健身的效用 並不比其他類型來的低。以可調式啞鈴為例,他的優點不只能適合不同的年齡、 性別和體型的人來進行健身運動,更可達到全身個部位肌肉鍛鍊的效果。而因為 其體積小的優點,此類型的健身器材常是健美愛好者的必備器材。而這類的器材, 因為體積小巧且容易調整訓練強度,也適合中老年人進行健身運動。 圖 2.13 彈簧腕力器。 而在健身器材的使用上,因為每位使用者的身高胖瘦皆有所差異,因此在器 材的使用上,都必須依照每位使用者,定義出適合的運動姿勢。除此之外,每件 不同的健身器材,所訓練的肌肉群都有所不同。但實際的使用上,常因為使用者 的姿勢錯誤,而導致肌肉群的訓練錯誤。因此,在健身器材的使用上,不僅需要 針對個人的體型不同的情況,在使用前有所校正,更需要針對每位使用者的當下 使用情況,進行即時的修正。而通常特定的健身器材,只專門訓練某肌群。以圖 2.14 的臥推的健身器材為例,此動作主要為訓練人體上半身肌肉。而主要的訓練 肌肉位置就是胸大肌。如圖 2.15 中所示。
圖 2.14 臥推示意圖。(http://zh.wikipedia.org/wiki) 圖 2.15 臥推訓練肌群。(http://zh.wikipedia.org/wiki)
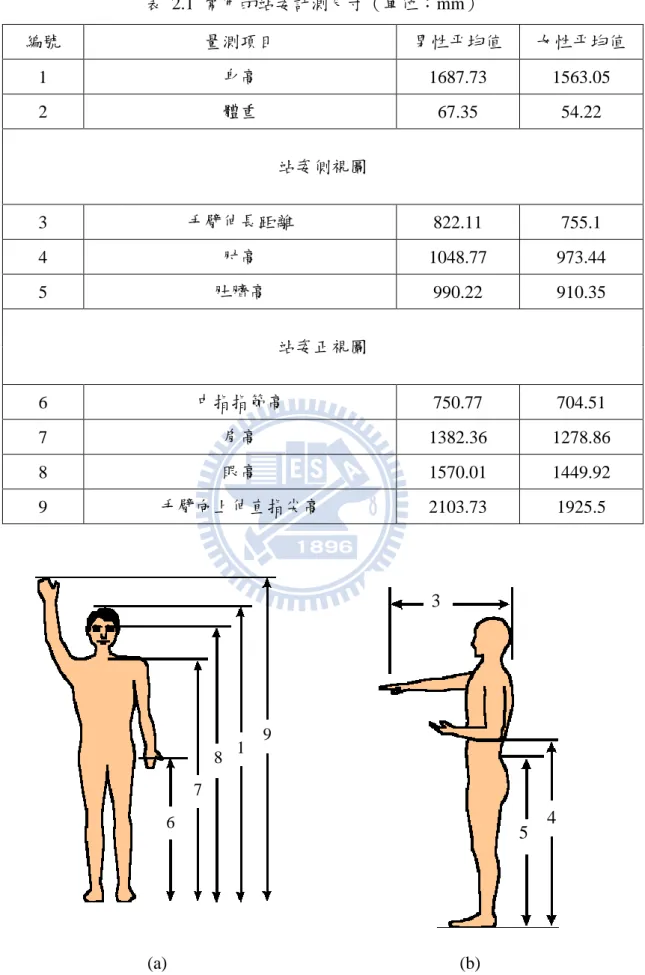
2.4 人體尺寸相關資訊
因為本論文採用的影像為三維深度影像,因此可利用相機與移動人體的相關 距離,定義出健身器材與使用者在空間中的興趣區域(ROI),再將得到的區域進 行後續的運算,一方面來達到減少運算量,另一方面可以減低運算的錯誤率。而 針對人體空間尺寸的估測部分,在台灣勞工安全衛生所資料庫[19]中,表 2.1 提 供了台灣人人體各部位的相關統計數字。如圖 2.16,顯示出人體的各部位尺寸。 本論文參考此數據作為興趣區域的選擇依據。表 2.1 常用的站姿計測尺寸(單位:mm) 編號 量測項目 男性平均值 女性平均值 1 身高 1687.73 1563.05 2 體重 67.35 54.22 站姿側視圖 3 手臂伸長距離 822.11 755.1 4 肘高 1048.77 973.44 5 肚臍高 990.22 910.35 站姿正視圖 6 中指指節高 750.77 704.51 7 肩高 1382.36 1278.86 8 眼高 1570.01 1449.92 9 手臂向上伸直指尖高 2103.73 1925.5 (a) (b) 6 8 7 1 9 5 4 3
表 2.2 常用的坐姿計測尺寸(單位:mm) 坐姿側視圖 10 眼睛至座面距離 785.34 731.79 11 頭頂至座面距離 903.04 844.52 12 手臂向上伸直指尖至座面距離 1322.03 1211.6 13 手肘至握拳中心距離 306 271.27 14 膝上緣高 515.66 467.06 15 座高 404.52 376.27 16 座深 (以膝前緣至臀後緣距離估算) 551.5 526.79 13 10 11 12 15 16 14 圖 2.17 坐姿側視圖。(http://www.iosh.gov.tw)
第三章 系統流程
本論文主要是希望能夠提出一個基於深度影像的健身器材使用輔助系統。而 此系統的輸入資料是由微軟的 Kinect 經過深度影像量測的技術,去拍攝健身中 心內使用者的即時使用情形進行分析。本章節將依序介紹本論文所使用的系統架 構。 本章節共分成 5 小節,3.1 小節中將介紹整體的系統架構,針對本論文所提 供的系統進行一個全體性的介紹。3.2 小節中,將說明流程中所使用到的影像前 處理的執行細節。而 3.3 小節內容則說明如何針對使用者及其骨架進行偵測。3.4 小節則講解本論文中,提供的使用者介面設計。最後,3.5 小節則介紹本論文中 實驗中所使用到的姿勢修正標準。3.1 整體系統架構
在利用本論文中所使用的系統去進行場景的分析與判別。一開始系統在得到 場景深度影像後,為了增進系統的後續分析,首先進行影像的前處理動作。接著, 進行畫面中健身器材使用者的偵測與關節位置的判斷。然後,將所得到的資料, 藉由螢幕,顯示一使用者介面,另一方面,則結合健身教練提供的姿勢建議,在 提供畫面的同時,給予健身器材使用姿勢的建議資訊。以下的章節將更進一步介 紹系統每個方塊的實際執行細節。輸入下一場景 深度影像資訊 使用者人體骨架偵測 並於使用者介面顯示 否 使用者 是否停止? 是 影像前處理 停止輔助系統 圖 3.1 整體流程圖。
3.2 影像前處理
為了讓人體骨架的判斷上更為快速,在輸入影像的前處理上,本論文利用統 計的方式,參考 2.4 小節中的人體參數資料,並藉由相機的位置固定的條件下, 可以事先定義出健身器材在使用時,使用者會活動到的位置,如圖 3.4 中格線區 域即為使用者的使用器材時的區域。使用者位置的系統設定步驟首先先將相機固 定於定點後,如圖 3.2,開啟深度攝影機,接著讓使用者進入攝影機畫面中,找 出畫面中長時間有深度變化的影像畫素區域,而此區域即為畫面中使用者的位置, 利用此方法可以讓系統自動的找出使用者的畫素位置。接著,更搭配 2.4 小節中 提到的人體資料庫,如表 2.1 中的標號 3 的人體手臂伸長距離資料,將影像中深度較深的背景深度資訊移除,即移除輔助系統中會影響此系統判斷的影像像素資 料點。如同圖 3.5 中,影像背景的健身器材支架在深度比較深的位置,如果利用 人體資料庫的配合,以人體軀幹向後 400 公釐的深度為門檻,當輸入的影像中深 度介於此門檻的像素,這些位置即被系統判斷為使用者位置像素。加入此前處理, 不僅可以明顯的減少人體骨架判斷的資料量,更可以使得骨架的判斷上更為容 易。 圖 3.2 相機架設示意圖。 細部的流程如圖 3.3,首先輸入原始的場景深度影像,配合上述提到之預先 定義的使用者位置,再配合人體部位的尺寸資料,以這三個資訊結合的結果,將 場景中除了使用者所在像素的深度影像保留外,其餘的像素都設為 0,經過此這 些步驟的處理過後,將所得到的深度影像資料輸出至系統的下一個步驟。
找出資料中對應之 使用者位置像素 輸入 原始深度影像 實驗得到 之使用者 位置 人體尺寸 資料 移除 使用者位置像素外 的深度資料像素點 輸出 前處理後 的結果 圖 3.3 前處理流程圖。 圖 3.4 使用者位置圖。
(a)
(b)
3.3 使用者偵測與人體骨架判斷
本論文中為了考慮即時性並達到即時回饋的效果,使用 2.2 中所提到之人體 骨架特徵。此方法的選擇可以加快場景中人體骨架的判斷,進而利於此輔助系統 的運作。本系統參考[6]與[20]中的方式,並搭配 OpenNi 的使用,針對本系統中 所使用的場景進行系統使用者的偵測與分析,更進一步針對人體骨架在空間中的 位置加以判斷。以圖 3.6 為例[6],當輸入此深度影像資料I時,系統會將深度影 像的每一個像素,分別輸入本輔助系統使用[6]中所建立的人體骨架決策樹進行 運算。 圖 3.6 人體深度影像I。 如圖 3.7 中的像素點,當系統將此像素點的資料輸入人體骨架決策樹後,如圖 2.5,判斷出此像素點( , )I x 為人體的頭部像素。( I, x) 圖 3.7 人體深度影像
I x 位置示意圖。 , 而當系統針對所有的像素點進行分類完成後,得出的結果如圖 3.8。如紅色的像 素代表頭部,草綠色的像素代表頸部像素。本輔助系統即是利用此方法,進行使 用者人體骨架的判斷。 圖 3.8 人體深度影像骨架結果。 如圖 3.9 中,即是同一影像所取出的使用者偵測與人體骨架判斷的範例流程示意 圖。圖 3.9 使用者骨架偵測流程圖。
3.4 使用者介面
為了讓使用者能更為即時的接收到本論文中系統的回饋資訊,本論文使用即 時影像的回饋系統。將攝影機所拍攝到的即時影像以及影像經過使用者偵測與人 體骨架判斷後,所得到的骨架資料,同步的顯示在電腦螢幕上。如圖 3.5 中,畫 面中的彩色影像為 Kinect 中彩色相機的資料,而圖 3.5 中的綠色畫面即為深度 資訊。當空間中的物體距離離相機越遠,畫面中的綠色則越淡。如圖 3.11 中的 地板,可明顯看出顯示的差異性。而圖 3.12 中的藍色線條則是畫面中使用者的 骨架資訊,本系統的使用者介面中,在顯示時一共顯示出 15 個人體關節的骨架 資訊,分別是頭、頸、左肩膀、右肩膀、左手肘、右手肘、左手、右手、腰、左 髖關節、右髖關節、左膝蓋、右膝蓋、左腳及右腳等 15 個部位的整體骨架連線,如圖 3.12。經過此使用者介面畫面的即時播放可以使得這套系統在使用時,讓 器材的使用者更直覺的接收到自己使用的實際情形。此步驟的細部流程如圖 3.10。 使用者介面顯示 人體骨架影像 是 使用者介面顯示 姿勢錯誤位置 執行姿勢 修正標準 指令 使用者介面顯示 姿勢建議文字 判斷使用者姿勢 是否錯誤? 否 輸入 使用者骨架 偵測結果 圖 3.10 使用者介面流程圖。 在獲得使用者骨架偵測結果後,將影像顯示於螢幕的使用者介面上,接著搭配小 節 3.5 中說明的健身器材使用姿勢修正標準,來判斷畫面中的使用者姿勢是否錯 誤,如果姿勢有誤,則依據錯誤的關節位置標示出來。並進一步顯示正確姿勢的 對話文字。如果姿勢正確,則繼續輸入下一場景深度影像,再一次進行 3.2 至 3.4
圖 3.11 深度遠近示意圖。 圖 3.12 骨架顯示圖。
3.5 姿勢修正標準
本論文中針對使用者的修正建議都是在專業的健身教練的指導之下進行設 計。因為健身器材的使用者使用健身器材時,大多的姿勢錯誤的成因都是因為身 體部位的角度錯誤或身體部位的擺放位置錯誤,進而造成關節施力方向的錯誤。因此本系統即是利用 3.3 小節的系統流程中得到的人體各個骨架的位置,進行針 對畫面中使用者骨架位置的計算,得出使用者在使用器材時,應該注意的關節位 置的資訊,如果與健身教練提供的姿勢錯誤資訊相符,則判別為使用者的使用姿 勢錯誤。而針對使用者在使用此介面時,當使用者的姿勢錯誤時,如圖 3.13, 此系統會在畫面上顯示出錯誤的關節位置,並以紅色標示,如圖 3.14,藉以提 醒使用者姿勢的錯誤。而在本小節中,更進一步的介紹,本論文進行實驗時,所 使用到的健身器材以及相關知識。在 3.5.1 小節中,介紹本系統中如何執行姿勢 修正標準。而 3.5.2 小節說明健身肩推動作的步驟。3.5.3 小節中,說明蹲舉架的 使用說明。最後於 3.5.4 小節中,則說明啞鈴後推動作。
3.5.1 姿勢修正標準流程
為了讓使用者在使用本實驗輔助系統上更加便利,本論文在螢幕介面的視窗 旁,更進一步顯示出姿勢的文字修正建議。如圖 3.14。此提醒資訊可以讓使用 者不僅了解姿勢的錯誤位置,更可透過此系統進行使用姿勢的即時修正。另外, 為了讓此輔助系統在畫面的顯示上更有效率,本論文中,針對各個器材的使用情 形,更加入了使用者動作起始的偵測。希望透過定義各個不同的健身器材的使用 情況,當使用者滿足某些條件後,畫面才開始顯示系統輔助的結果。而這些條件 也是針對健身教練的建議下進行設計。當輔助系統尚未啟動時,輔助系統的對話 視窗會顯示如圖 3.16 的字樣。此設計可以讓使用者更清楚輔助系統的運作情 況。 圖 3.15 為此姿勢修正標準的執行詳細步驟。此步驟中將 3.3 小節得到的資 料與輔助系統的啟動條件互相比較,如果使用者的動作符合系統啟動條件,那麼 則輸出開始執行姿勢修正標準的指令。反之,系統只會偵測畫面中的人員,並不 會啟動輔助系統,而螢幕只顯示如圖 3.16 的畫面。各系統啟動條件將於下列小 節詳細介紹。圖 3.13 使用者姿勢錯誤示意圖。
輔助系統 啟動條件 是 使用者動作 是否符合 啟動條件? 輸入 使用者骨架 資訊 否 輸出 執行姿勢修 正標準指令 圖 3.15 姿勢修正標準流程圖。 圖 3.16 輔助系統未啟動畫面。
3.5.2 肩推機
肩推器材使用的重點中,首先必須先穩定且舒適的坐到肩推機上,而在動作 開始的起始動作上,必須藉由調整器材椅座的高度,使得雙手握拳的連線高度約 與肩線位置同高。如圖 3.18。如果雙手的高度過低,表示必須調整如圖 3.17 肩 推機椅座機構的高度,以避免使用姿勢的錯誤。在此器材的使用上,常因為使用 者出現如圖 3.19 中的姿勢,導致肘關節的傷害。而此肩推動作的訓練肌群為三 角肌。肌群詳細位置如圖 3.20 所示。 此肩推動作的系統啟動條件設定為,當畫面中的使用者兩手拳頭連線超過頭 部位時,如圖 3.21,輔助系統就啟動。因此,針對肩推動作,必須偵測使用者 的上半身的人體骨架位置。此輔助系統針對此器材使用時,所應用到進行姿勢判 別的骨架位置有:頭、頸部、左肩膀、右肩膀、左手肘、右手肘、左手及右手。 詳細人體部位如圖 3.22。當系統偵測到使用者的雙手骨架位置的高度比左肩膀 與右肩膀的連線中心點的位置低時,就判別為姿勢錯誤。而當姿勢錯誤時,針對 肩推機動作本系統會依據雙手與肩線位置,指示使用者調整椅座機構的高度格數。 如圖 3.23。 圖 3.17 肩推機椅座調整機構。圖 3.20 三角肌。(http://zh.wikipedia.org/wiki)
圖 3.22 人體部位圖。(http://zh.wikipedia.org/wiki)
3.5.3 蹲舉架
蹲舉架的使用步驟,首先必須選擇適當重量的槓鈴。在取好槓鈴的中心線後, 將槓鈴舉起。並將槓鈴放置於斜方肌上端中央部。如圖 3.24。而此健身器材的 動作是舉槓,並隨膝蓋彎曲,如圖 3.25,進行一蹲坐的姿勢後,在伸直膝蓋, 回到如圖 3.24,身體直立的動作。此動作最需注意的部份是在進行蹲舉的動作 時,脊椎不能有彎曲的情形出現,如圖 3.26,亦即動作時必須胸部上挺,眼睛 直視前方,將腰桿打直的進行此健身器材的動作。否則,如果脊椎彎曲進行此動 作的話,如圖,將會影響腰部區塊的關節,而導致受傷。此蹲舉動作的訓練肌群 為股四頭肌、臀大肌與腿後腱肌群。如圖 3.27。 此蹲舉架動作的系統啟動條件設定為,當畫面中的使用者兩手拳頭連線與肩 約同高時,如圖 3.24,輔助系統就啟動。因此,針對蹲舉架動作,此輔助系統 針對此器材使用時,所應用到進行姿勢判別的骨架位置有:左肩膀、右肩膀、左 左髖關節及右髖關節。當系統偵測到使用者的左肩膀與右肩膀的連線中心點深度 值和左髖關節與右髖關節的連線中心點的深度值差距超過 90 公釐,就判別為姿 勢錯誤,此處的 90 公釐是經過健身教練的協助下所定義出的判斷深度閥值。而 當姿勢錯誤時,系統會於使用者介面上顯示如圖 3.28,提醒蹲舉架使用者,必 須注意脊椎的彎曲情況。 圖 3.24 蹲舉架預備姿勢。圖 3.25 蹲舉正確姿勢。
(a) (b) 圖 3.27 訓練肌群。(a) 股四頭肌;(b) 臀大肌。(http://zh.wikipedia.org/wiki) 圖 3.28 蹲舉架輔助畫面。
3.5.4 啞鈴後推
執行此健身動作時,首先必須選擇所需訓練的啞鈴磅數,在穩定的拿好啞鈴 後,此健身器材的預備動作是手臂必須呈約 90 角,如圖 3.29。而動作的進行中, 順著手臂的力量,將啞鈴順勢的隨著手臂的伸直,往背部方向推舉啞鈴。此動作在收回手臂時,必須保持約 90 角,如果角度小於 90 度,如圖 3.30,則會讓導 致此動作的訓練肌群與健身器材指南中的訓練肌群有所差異。可能會降低訓練肌 肉的效率。而此啞鈴後推動作的強化肌群為三角肌與肱三頭肌。 此動作的系統啟動條件設定為,當畫面中的使用者手臂成約 90 度,如圖 3.29 時,輔助系統就啟動。因此,針對啞鈴後推動作,所應用到進行姿勢判別的骨架 位置有:左肩膀、左手肘與左手。而系統當進行運算時,利用(3-1)式找出上手臂 與前臂的角度。藉由此方法,找出空間中實際的使用者動作時手肘夾角。其中, a 代表肘關節到肩膀關節之向量, b 代表手到肘關節之向量。而當姿勢錯誤時, 系統會於使用者介面上顯示如圖 3.31,提醒使用者,必須注意手臂執行此動作 的角度。 1 cos a b a b (3-1) 圖 3.29 啞鈴後推預備姿勢。
圖 3.30 啞鈴後推錯誤姿勢。
第四章 實驗結果
在本章節中將說明本論文之輔助系統進行的實驗並分析實驗的結果。在 4.1 節中介紹用來測試本論文中輔助系統的實驗機制。而在 4.2 節中說明出實驗的結 果與分析。最後於 4.3 節中,進行實驗的結果討論。4.1 實驗機制
本節將說明進行之實驗的相關資訊。首先將於 4.1.1 小節中介紹本實驗所使 用到的儀器與設備。4.1.2 小節將介紹在實驗時,使用者介面所呈現的實驗介面 視窗。4.1.3 小節則介紹本輔助系統測試的健身器材類別。而 4.1.4 小節列出參與 本實驗的受測者資料。最後於 4.1.5 說明評估本實驗的效能指標。4.1.1 實驗設備
本論文提供一健身器材使用輔助系統,希望能透過螢幕的視覺回饋,來達到 輔助使用者使用坊間常見健身器材。而進行實驗的器材需要一微軟公司之 Kinect 進行場景資料的取得,另外需要一相機腳架,方便 Kinect 的架設。實驗的進行 中還需一筆記型電腦,利用筆記型電腦執行本論文中的輔助系統,並當成此實驗 中使用者介面呈現的工具,如圖。此處電腦的作業系統為 Window Vista,中央處 理器為 Intel Core2 T7300(2.0GHz),內建記憶體 3G,並使用 nvidia 8600gt 獨立顯 示卡。除此之外使用 Sony-W130 相機,記錄實驗的進行。圖 4.1 實驗設備。
4.1.2 實驗介面
本論文的輔助系統使用者介面呈現在電腦螢幕上時,主要分為兩個視窗,如 圖 4.2。(1)為主要的影像視窗,在此視窗中,顯示由 Kinect 擷取到的原始色彩影 像資料、經過處理過後的深度影像圖以及人體骨架圖。影像的尺寸為 640*480。 (2)為此輔助系統的對話框視窗,此對話框一方面可提示此系統使用者系統的起 始狀態,另一方面,則顯示經過系統運算過後,給出的健身器材使用的姿勢建議。 (1) (2) 圖 4.2 使用者介面。4.1.3 實驗對象
本實驗為了測試本論文中之系統,分別針對不同類型的健身器材進行使用者 的使用實驗測試。一共選用三個健身器材。其一選用蹲舉架,如圖 4.3,此器材 特性是使用者利用蹲舉架所圍出的範圍,進行槓鈴的蹲舉動作。屬於有特定活動 區塊的器材。另一器材選用肩推機,如圖 4.4。此器材的特性在於,當使用者使 用時,器材本身的支架,會依隨著使用者的使用情況進行移動。即此器材包含有 活動的支架。除此之外,則選用最多人使用的啞鈴來進行實驗,如圖 4.5。啞鈴 是最普遍的健身器材,因為其體積小且攜帶方便,在很多家庭都可以看到啞鈴的 存在。啞鈴的廣泛性也是本論文選作實驗目標的理由之一。 圖 4.3 蹲舉架。圖 4.4 肩推機。 圖 4.5 啞鈴。
4.1.4 受測者資料
此輔助系統期望能提供給各樣體型的使用者使用,因此為了讓此實驗更能廣 泛的測試,本實驗在受測者的選用上,特別針對不同體型受測者的選取。以下為 各受測者的體型資料。並為了實驗呈現的方便,將各受測者依序編號。以利於實 驗的紀錄。表 4.1 受測者資料 編號1 編號2 編號3 編號4 編號5 編號6 身高(cm) 180 175 174 170 178 165 體重(kg) 85 65 75 72 65 56
4.1.5 評估系統效能
本實驗之輔助系統主要的目的是提供健身器材的使用者,一個姿勢的輔助介 面。因此評估系統效能方面,則以器材使用姿勢的偵測結果為主。而此處的錯誤 姿勢則以 3.5 節中提到的各個器材的標準姿勢為比對標準。根據使用者使用的情 況,可以將此輔助系統的效能結果,此處將輔助失敗定義為兩種情況,一種是當 使用者的姿勢錯誤時,系統卻顯示出使用者姿勢正確。另一種為當使用者的姿勢 正確時,系統卻顯示出使用者姿勢錯誤。此兩種情況的總和稱為輔助錯誤總次數。 而輔助系統執行總次數則定義為實驗中使用者使用器材的總次數。(4-1)式定義使 用的正確率。 輔助錯誤總次數 正確率 = 1 - × 100% 輔助系統執行總次數 (4-1) 此正確率可以直接看出此輔助系統的好壞程度。因此可利用來衡量此輔助系 統的效能。4.2 實驗結果與分析
在實驗結果的呈現上,為了利於看出本輔助系統針對不同類型之健身器材的 輔助效能。將分成 3 小節分別說明各受測器材的實驗結果並加以分析。因為進行 每段實驗時,採用錄影時間長度為分段基準,因此不同的受測者會有些微的實驗 次數的差異。4.2.1 小節中,將說明蹲舉架之實驗結果與分析。而 4.2.2 小節則說4.2.1 蹲舉架器材實驗結果
本實驗的進行,共有 4 位受測者,編號 1 至 4 號。每位受測者,都分別在專 業健身教練的指示下進行蹲舉的動作。每位人員分別執行約 40 次的蹲舉動作。 而這些動作中,均包含蹲舉正確與蹲舉錯誤姿勢。表 4.2 為實驗結果表。 表 4.2 蹲舉架輔助系統實驗結果輔助系統執行總次數
輔助錯誤總次數
正確率
受測者編號1
33
1
96.97%
受測者編號2
44
2
95.45%
受測者編號3
40
2
95.00%
受測者編號4
38
1
97.37%
整體
155
6
96.13%
由結果可看出每位受測者在使用蹲舉架時,此輔助系統提供超過 95%的準確率。 而在錯誤分析方面,因為使用者在進行蹲舉動作時,當攝影機在讀取深度影像時, 還是會受到蹲舉架本身的框架影響。在本實驗結果中的輔助失敗例子如圖。可以 看出,當受測者位置過於接近框架時,而產生與其他使用者使用位置不同時,此 時特殊的遮蔽情況就會使得本輔助系統判讀人體骨架位置的誤差。進而造成姿勢 判斷標準的運算錯誤。但大部分的受測者,實際進行蹲舉動作時,都會注意與框 架的距離。也因此能讓這套輔助系統能適用在這套器材上。 圖 4.6 蹲舉架輔助失敗情況。4.2.2 肩推機器材實驗結果
本實驗的進行,共有 3 位受測者,編號 1 至 3 號。每位受測者,都分別在專 業健身教練的指示下進行肩推的動作。每位人員分別執行約 20 次的肩推動作。 而這些動作中,均包含肩推正確與肩推錯誤姿勢。表 4.3 為實驗結果表。 表 4.3 肩推機輔助系統實驗結果輔助系統執行總次數
輔助錯誤總次數
正確率
受測者編號1
20
2
90.00%
受測者編號2
17
1
94.12%
受測者編號3
20
1
95.00%
整體
57
4
92.98%
而在錯誤分析方面,因為使用者在進行肩推動作時,健身器材架的支架,也會隨 著使用者的運動而移動。而在本實驗結果中的輔助失敗例子如圖 4.7,圖中以圓 圈標示出人體關節部位。因為健身器材的支架與人的手臂的外型相似,因此當我 們執行本實驗的輔助系統時,就會因此造成姿勢判斷標準的運算錯誤。為了減少 此問題,也才因此特別用 2.4 節中提到的人體尺寸的參數,來減少此類誤差的發 生。但仍會出現如圖之錯誤輔助的情況發生。而受測者編號 1 號比其他受測者的 準確率低的原因,經過更進一步的觀察實驗後,發現因為此蹲舉架的支架的位置 與受測者的高度相符,因此,在實驗的進行時,受測者編號 1 被系統誤判的機率 就較高。才會有比較低的系統輔助準確率。圖 4.7 肩推機輔助失敗情況。
4.2.3 啞鈴器材實驗結果
本實驗的進行,共有 3 位受測者,編號 4 至 6 號。每位受測者,都分別在專 業健身教練的指示下進行啞鈴後推的動作。每位人員分別執行約 20 次的啞鈴動 作。而這些動作中,均包含啞鈴後推正確與啞鈴後推錯誤姿勢。表 4.4 啞鈴後 推輔助系統實驗結果為實驗結果。 表 4.4 啞鈴後推輔助系統實驗結果輔助系統執行總次數
輔助錯誤總次數
正確率
受測者編號4
22
1
95.45%
受測者編號5
19
2
89.47%
受測者編號6
24
1
95.83%
整體
65
4
93.85%
在錯誤分析方面,由於啞鈴後退的動作進行時,受測者手臂會與人體上半軀 幹的位置過於接近。導致人體骨架的拳頭位置的判斷錯誤。另外一個原因是因為, 如果受測者在使用啞鈴的時候衣服過於寬鬆,也會導致本實驗的輔助錯誤。如圖。此受試者的衣物較為寬鬆,在衣服產生過度皺摺的情況下,會讓此輔助系統的運 算產生誤差。因此會在手臂的角度運算上,產生錯誤。 圖 4.8 啞鈴後推輔助失敗情況。
4.3 實驗結果討論
為了測試此輔助系統的整體效能,在實驗器材的選擇上,特定的選用不同類 型的健身器材進行實驗,其一特別挑選器材使用時,支架不移動的蹲舉架;另外 則是使用時器材支架會隨使用者動作而有所改變位置的肩推機;第三個實驗則選 擇家庭中最常見的啞鈴進行實驗。此三種類型的器材,除了設計類型上的不同外, 都是健身愛好者常用的健身器材之一。而討論本輔助系統的實驗結果,在本節中 共分成 3 小節進行實驗結果的分析。在 4.3.1 中,針對實驗的健身器材進行其設 計特性的討論。4.3.2 小節中,討論輔助系統的使用者的體型因素,影響本輔助 系統的結果。於 4.3.3 小節中討論使用者穿著因素在輔助系統的執行上的影響結 果。最後在 4.3.4 小節中,則針對本輔助系統探討整體輔助系統的效能。4.3.1 健身器材特性
而經過實驗的過程發現,針對不同類型的健身器材,此輔助系統在輔助的效 能上都能有不錯的表現。在蹲舉架類的器材上,本論文掌握此類型的器材支架的 固定特性,與使用者在使用此蹲舉架時的位置特性,本輔助系統實驗的結果中, 此蹲舉架器材因為支架的固定而有不錯的輔助系統正確率,正確率確實為實驗結 果中最高的器材。主要的誤差出現情況也是出現在,使用者因為使用器材時所處 位置的不良,造成相機與受測者的位置間,產生器材支架遮蔽受測者的情形,才 會導致輔助系統的判別產生誤差。而在肩推機實驗中,此類型器材的最大需克服 點在其活動性的支架,健身器材的支架會隨使用者的使用而移動。然而,雖然針 對此類型的器材進行輔助實驗時,一定會因為活動性的支架因素而有準確率下降 的趨勢,但是在針對此移動支架類型的支架位置的固定移動特性進行分析後,可 以透過此輔助系統的設定,讓此類器材仍然有不錯的輔助正確率表現。除此之外, 從實驗結果裡發現,第三類的啞鈴器材因為其設計特性,體積小巧,因此使用者 在使用時,多為貼身使用。亦即器材的空間位置多與受測者的位置相當接近。因 此,啞鈴器材在實驗的結果中會因為使用者的衣服因素而造成此輔助系統的效能 些微下降,當受測者的衣物過於寬鬆時,會使系統產生誤判,導致系統對於手臂 的真實角度的判斷錯誤。但是此問題如果考慮健身時,使用者多穿著貼身衣物的 常態,那麼從第三個實驗的其他受測者的輔助正確率來看,此輔助系統還是相當 有實用性。4.3.2 體型因素
另外,針對不同體型的使用者使用本輔助系統的情形可由統計的數字來看出, 在蹲舉架的實驗中不同體型的受測者的實驗結果中,可看出受測者編號 1 與受測 者編號 4 身高相差 10 公分,體重也相差 10 多公斤,因此可看出兩位受測者是存在體型差異的受測者。但是實驗結果顯示兩位的受輔助系統正確率並沒有相差很 多,小於 2%。因此可以斷定在蹲舉架實驗中,體型並不會影響輔助的正確率。 而在肩推機器材的實驗中,可看出受測者編號 1 與編號 3 存在身高差距 6 公分, 而編號 1 與編號 2 也差距 5 公分。而相對應的輔助系統正確率卻呈現出與身高負 相關的趨勢。由實驗中的影片可看出,導致此誤差的因素是因為當進行肩推機器 材實驗時中,當受測者身高與器材的支架高度接近時,就會產生受測者的手臂與 肩推機的支架誤判的情況。而當受測者與支架的距離越多,誤判的情形就越少。 可由圖 4.9 看出在同一動作下,因為受測者身高的差異,導致系統的輔助效果有 所不同。會造成此結果的主要因素是,本系統採用深度影像資料進行人體骨架的 判斷。在肩推機的實驗中,當受測者的肢體位置剛好與肩推機支架形成如圖的相 對位置,那麼就會使的輔助系統產生錯誤。而由於支架活動的高度約為 200 公分, 因此當受測者身高越接近此高度時,系統產生錯誤的機會就越大。因此可以說在 蹲舉架的實驗中,體型中的身高因素會影響著輔助的正確率。 (a) (b) 圖 4.9 蹲舉架實驗情形。(a) 系統誤判;(b) 系統正確判斷。
而在啞鈴後推的實驗中,可以看出,編號 4 到 6 的受測者,體型差異頗大。編號 5 與編號 6 受測者的身高差距達 13 公分,編號 4 與編號 6 的體重相差 12 公斤。 可看出受測者的體型差異頗大。但深入的觀察實驗情況,可以發現體型並不是影 響輔助正確率的因素,編號 4 與編號 6 的體型差異大,但是都有相近的正確率表 現。因此可以說在啞鈴後推的實驗中,體型並不會影響輔助的正確率。
4.3.3 穿著因素
在蹲舉架實驗中,編號 3 的受測者的衣物較為寬鬆,如圖 4.10。但是由輔 助正確率的結果來看,受測者編號 2 與編號 3 的實驗因素相近,只差異在衣服的 寬鬆程度,因此可得出受測者衣物的因素並不會影響蹲舉架輔助系統的執行結 果。 圖 4.10 受測者編號 3。 相同的實驗結果也在肩推機的實驗中可以得到,衣物較寬鬆的受測者編號 3,還 呈現出最高的正確率,因此可以得到衣服亦不是一影響肩推機輔助結果的因素。 然而,在在啞鈴後推的實驗中,受測者編號 5,相較於其他受測的衣服,其寬鬆 程度是受測者中,最為大的。而實驗結果也顯示衣服寬鬆的受測者編號 5 的輔助 的正確率比其他受測者來的低,而且低 5%,因此可以推論受測者衣物的因素確實會影響啞鈴後推輔助系統的執行結果。會發生此因素的原因主要是因為器材使 用的設計特性,導致此輔助系統在獲取使用者深度資訊時,由於手臂在使用器材 時,會很接近人體軀幹,而在人體部位的分辨下,就會使得輔助系統的判斷錯誤。 也因此,在啞鈴後推輔助實驗中,衣服確實是一個會影響輔助正確率的一個因 素。
4.3.4 整體系統結論
經過整體的實驗分析後發現,在本輔助系統中使用影像為以紅外線方式量測 所獲得的影像,在此量測方法下的優點是取代過去使用高功率的雷射光束,因此 本方法可以使用在人體位置的量測上。但相對的,本方法因為技術上的限制,其 所得到的深度資訊,會依據物體所在的遠近位置而存在 mm 等級的誤差。這樣的 限制導致本系統中空間位置的判別上之偏差。雖然在本實驗中,影響的程度並不 很顯著,而且與實際健身教練人眼視角的限制相比之下,本系統仍有較好的表現, 但亦讓本論文中的系統存在著這樣的不可抗拒的量測限制。另外,因為深度影像 量測的是物體到相機之間的距離,如果待量測的物體被過度的遮蔽,就會產生使 用人員的偵測問題。因此本系統在架設的前提是要以使用者在相機的攝影範圍內 較不受遮蔽的位置為考量。在架設本系統時,必須預先考慮到器材的位置而進行 配置。而在使用者介面的呈現上,因為目前螢幕仍以平面顯示為主,有部分受測 者在姿勢建議的輔助提醒上,提出螢幕的顯示存在平面螢幕顯示的天生的視角侷 限,雖然會比實際健身教練常用的口頭指示來的明確,但確實不像如人眼的立體 視覺來的直覺。然而,在本論文中所進行的實驗中,在考慮如上所述的限制與系 統天生的瓶頸並考慮 4.3.1 到 4.3.3 小節的實驗因素下,並在此輔助系統在使用者 位置的設定與健身人員的著貼身衣物的前提下,表 4.2 到表 4.4 的實驗輔助正確 率證明本系統確實能提供使用者一個即時且有效率的健身器材即時輔助效能。第五章 結論與未來展望
隨著近年來的社會發展,國人的運動習慣逐漸改變。越來越多的人傾向使用 一個較沒有使用時間限制也較沒有場地限制的運動:室內健身器材。傳統的球類 運動或跑步運動,往往需要一個相當大的運動場地來達到運動全身的目的。除此 之外,現代人因為產業的快速發展,每個人的運動時間越來越不定,常常會因為 沒有場地而打消運動的念頭。室內健身器材,就因此提供一個較沒有空間限制與 時間限制的運動方式。雖然在坊間的健身中心裡,會聘有專業的健身教練進行健 身器材的使用指導。但是,往往卻因為成本的考量而有教練與學員比過低的情況。 因此本論文就提出一個健身器材的輔助系統,透過影像分析的技術,提供健身器 材的使用者一個即時的器材使用輔助系統。希望能在與教練教練的協助下,提供 器材使用者一個更能即時且更直覺的器材使用姿勢的輔助系統。而本系統的資料 輸入裝置的選擇上,以非接觸式為前提,其理由考慮裝置在運動中可能的碰撞損 壞情形。除此之外,此非接觸的特性也可以減少輔助系統使用者因為配戴的方式 錯誤,而影響輔助效果的可能性。另外,為了減少因為光線不足或是物體反光的 環境因素,本系統使用的影像特別選用較不會因為光線因素而有所影響的深度影 像。而由第四章的實驗結果來看,針對使用上比較有危險性的支架類健身器材, 在本論文中的輔助系統的輔助之下,使用者也多能達到不錯的輔助正確率。也藉 由此章節的實驗結果,證明此系統確實能達到健身器材使用輔助的成效。而且透 過本論文中的即時回饋的使用者介面接收系統回饋訊息,健身器材的使用者能比 透過健身教練的方式來的更快獲得姿勢修正的建議。 在未來工作的部份,針對本論文中所呈現的使用者介面,本系統在介面上仍 有些許的不同步的情況,這樣的情形會讓使用者獲取姿勢修正時產生延遲,這情 況如果能透過結合逐漸興起的立體投影技術,一方面在較新的硬體與軟體的協助 下縮短系統延遲的時間,另一方面,能將使用者的使用情況直接的投影在使用者眼前,將可讓使用者更直覺式的接收到此輔助系統所提供的姿勢建議。另外,本 論文中主要的目的是錯誤姿勢偵測。然而在健身器材的使用上,實際的健身教練, 更可以因使用者的體型及耐力程度,因人制宜的設計不同的健身器材使用姿勢。 但這需要透過建立更多的資料庫來達成。在未來如果能夠發展出一套不僅能偵測 錯誤姿勢,另一方面更能因不同的使用習慣提供不同姿勢建議的輔助系統,那麼 這樣的輔助系統就能夠更進一步的增加健身器材的使用效率。
參考文獻
[1] D. Grest, J. Woetzel, and R. Koch, “Nonlinear Body Pose Estimation from Depth Images,” Lecture Notes in Computer Science, vol. 3663, pp. 285-292, 2005. [2] H. T. Chen, M. C. Tien, and Y. W. Chen, “Physics-based Ball Tracking and 3D
Trajectory Reconstruction with Applications to Shooting Location Estimation in Basketball Video,” Journal of Visual Communication and Image Representation, vol. 20, no. 3, pp. 204-216, 2009.
[3] S. Belongie, J. Malik, and J. Puzicha, “Shape Matching and Object Recognition Using Shape Contexts,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 2, no. 4, pp. 509-522, Apr. 2002.
[4] D. M. Gavrila, “Pedestrian Detection from a Moving Vehicle”, in Proceedings of European Conference Computer Vision, Dublin, vol. 2, pp.37-49, Jun. 2000. [5] Sugizo(2010)。身體就是控制器。線上檢索日期:2012 年 5 月 21 日。網
址:http://www.techbang.com/posts/2936-get-to-know-how-it-works-kinect/ [6] J. Shotton, A. Fitzgibbon, M. Cook, T. Sharp, M. Finocchio, R. Moore,
A.Kipman, and A. Blake, “Real-time Human Pose Recognition in Parts from Single Depth Images,” IEEE Conference on Computer Vision and Pattern Recognition , vol. 2, no. 3, pp.1297-1304, Jun. 2011.
[7] Y. Amit and D. Geman, “Shape Quantization and Recognition With Randomized Trees, ” Neural Computation, vol. 9, pp. 1,545-1,587, 1997.
[8] D. Comaniciu and P. Meer, “Mean Shift: A Robust Approach Toward Feature Space Analysis,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 24, no. 5, pp. 603-619, May 2002.



![圖 2.14 臥推示意圖。(http://zh.wikipedia.org/wiki) 圖 2.15 臥推訓練肌群。(http://zh.wikipedia.org/wiki) 2.4 人體尺寸相關資訊 因為本論文採用的影像為三維深度影像,因此可利用相機與移動人體的相關 距離,定義出健身器材與使用者在空間中的興趣區域(ROI),再將得到的區域進 行後續的運算,一方面來達到減少運算量,另一方面可以減低運算的錯誤率。而 針對人體空間尺寸的估測部分,在台灣勞工安全衛生所資料庫[19]中,表 2.](https://thumb-ap.123doks.com/thumbv2/9libinfo/8122402.165947/31.892.333.592.107.340/文採用定義出健身器材與使用在空間中興趣區域ROI得到算的人體空間.webp)