漸增式資源配置之決策支援系統-以警用巡
邏箱配置為例
A Decision Support System for Incremental Resource
Allocation – Taking Patrol Box Allocation as Example
王健亞
1Jen-Ya Wang
弘光科技大學資訊管理系
林政彥
2Cheng-Yen Lin
弘光科技大學資訊管理系
元智大學管理研究所
陳海燕
3Hai-Yen Chen
逢甲大學資訊處
1Department of Computer Science and Information Management, Hungkuang
University,
2Department of Computer Science and Information Management,
Hungkuang University, Graduate School of Management, Yuan Ze University and
3
Office of Information Technology, Feng Chia University
(Received June 10, 2008; Final Version October 15, 2008)
摘要:一般的資源配置問題大多是在給定條件下追求具有最大效益或最低成本的資源配置,一 旦有新資源加入(條件異動)就必須重新分配,所以新增資源後配置結果能否與之前配置結果相 容將對整體成本有重要的影響。過去資源配置方法欲從m 處預定地選出 n 處配置資源時,大多 無法在舊有配置結果上新增資源,而且還可能因人為疏忽在同一地點設置多個資源,造成配置 後的資源不是相距太近就是相隔太遠的缺點,所以需要更有效的資源配置方法。爲解決此類資 源配置問題,本文首先分析此類資源配置問題特性;其次根據決策者需求來設計合適的目標函 數;最後以基因演算法與地理資訊系統為基礎建構一決策支援系統提供決策者合適的資源配置 建議。文中實驗結果除能顯示本文所提方法確實可以避免上述不當配置之外,或許也可以提供 其他領域中類似的資源配置問題參考之用。
本文之通訊作者為陳海燕,e-mail:[email protected]。 感謝台中市第二分局立人派出所提供相關意見。
340 管理與系統
關鍵詞:漸增的、資源配置、基因演算法、巡邏箱
Abstract: General resource allocation problems usually aim to pursue the maximum benefits or the lowest cost under given conditions. Once some extra resources are available (i.e., condition changed), we need to re-allocate these resources. Therefore, whether a re-allocation remains consistent with the previous one becomes a decisive factor in cost reduction. When choosing n proper places out of m, traditional resource allocation schemes may suffer from the following drawbacks. They cannot add new resources directly to a previous allocation and thus the previous allocation will be utterly repudiated. Moreover, they might assign multiple resources almost to the same place due to culpable disregard. Consequently, two allocated resources may be too distant from or too close to each other. A more practical method is thus called for. In this paper, a practical method is proposed to solve such kind of problems. First, the properties of the problem are analyzed. Second, a suitable objective function is defined according to decision makers’ needs. Finally, a decision support system is implemented to provide proper resource allocation suggestions, which is based on Genetic Algorithm (GA) and Geographic Information System (GIS). The experimental results show that the proposed method can prevent inappropriate resource allocations and also suggest that it may be useful to some similar cases in other fields.
Keywords: Incremental, Resource Allocation, Genetic Algorithm, Patrol Box
1. 簡介
1.1 研究背景與動機
一個好的資源配置 (Resource Allocation) 方法可以幫助決策者做出正確的決策,並且提高 行政效率及降低營業成本,所以資源配置不論是在作業研究或管理學領域都是一個重要的議 題。通常資源配置的問題常有一到數個目標函數 (Objective Function),其中目標函數所代表的 意義可能是時間、成本、人力、或效益。完善的資源配置要盡可能同時最大化或最小化這些目 標函數,使配置結果得以利用最少的人力物力達到最大的效益。資源配置問題通常受許多條件限制,使得求解時在計算上非常耗時 (NP-hard) (Lee et al., 2005);另一方面,若利用人工配置還要同時兼顧決策者的各項要求也不容易,所以常有缺失。 以警用巡邏箱配置為例,希望每次配置都可在不推翻現有配置結果的前提下加入新資源來提高
效益,但傳統巡邏勤務安排都是靠著白板地圖或是手寫紀錄輔助,不但無法在舊有配置結果上 新增資源,而且還可能因人為疏忽或人情關說在同一地點設置多個巡邏箱,造成巡邏箱間不是 相距太近就是相隔太遠。圖 1 中的 A 與 B 兩家銀行位於省道同側,而銀行 C 位於省道 (大型 道路或障礙) 對側,此時如果該區域中允許在三個預定地選出兩處設置巡邏箱,可以從 A 與 B 銀行擇一設置巡邏箱,另一巡邏箱設在對側銀行 C,這是比較好的配置。如果兩家鄰近的銀行 A 與銀行 B 都設置巡邏箱 (較大圖例代表選中該預定地設置巡邏箱),這樣是一種警力資源的 浪費,因為大型道路一側設置過多巡邏箱而另一側卻沒有設置,造成資源配置不合理。另以校 地選址為例,新市鎮學區計畫中如欲興建五間學校,決策者會選取全區學童平均就學距離最短 的五處預定地建校,整體配置在該條件下達到最佳平衡。日後如要增建一所新校時將會打破之 前的平衡,無論新校選址何處僅能嘉惠某一處學童,因而全區就學距離變成有遠有近,所以較 有遠見的作法是當初就能考量六筆校地以上的資源配置。為改善以上舉例在加入新資源時全盤 推翻之前配置結果的缺點,我們應考慮以逐步漸進的 (Incremental) 方式配置資源,在加入新 資源後不會影響之前佈局又能因新資源加入而提高效益;此外,現今資源配置還有一部份停留 在紙上作業容易出錯,又有可能因人為疏忽或人情關說在相近的地點重覆配置,很難公正客 觀,所以希望可以設計一個合適的資源配置方法改善上述缺失。 正因為此類資源配置問題在計算上非常耗時,同時在配置資源時又有諸多條件必須滿足, 此時如有決策支援系統 (Decision Support System; DSS) 在旁提供決策者配置建議,將可以避免 許多人工作業的缺失又能在短時間內達到較高效益。此類資源配置問題多為半結構化 (梁定 澎,民 95),需要一有效方法協助決策者而非取代決策者,畢竟最後做出決策的是人而不是電 腦。再舉巡邏箱配置為例,如果 DSS 所建議之配置已具有該目標函數之最大效益,但是否要
342 管理與系統 在近日接連發生搶案的銀行附近多增加數個暫時巡邏箱,最後還是要由決策者決定,也就是具 有最大目標函數值的配置不一定就是現實世界最佳的配置,配置資源時還是需要某種程度上人 力介入。另一方面,此類資源配置問題也需要良好的人機互動方式,如 (梁定澎,民 95) 所指 出良好的使用者介面 (如圖形或多媒體格式) 在正確性、互動速度、學習時間、親和性都比純 文字介面的互動方式為佳。所以若能將配置結果以良好 DSS 顯示,將可以避免許多人為疏忽 又能縮短互動學習時間,同時也能提升決策之正確性與合理性。
1.2 研究目的與方法
本研究的目的是解決漸增式資源配置問題並且提供決策支援系統,此決策支援系統需要滿 足以下四點要求:(1)可以漸增資源,每次加入新資源時不需要全盤推翻之前配置結果。不同的 資源配置問題可能對於漸增資源有不同程度的要求:例如巡邏箱配置問題上最好可以保持之前 的配置,非不得已必須變更之前配置時也不致於成本太高;但在校地選址問題上一定要保持之 前的配置,因為將之前興建學校遷校成本太高。(2)兩兩配置資源間的距離不可太近也最好不要 相距太遠。舉圖 1 為例,同側相鄰的兩銀行重覆設置巡邏箱,員警幾乎於同一地點以步行檢視 同樣的週遭環境並簽名兩次加以確認,實在不是一種很恰當的配置方式,改進之道可從二者選 取一個合適地點設置巡邏箱即可。另外如果兩巡邏箱的距離相距甚遠,雖然可以在短暫執勤時 間巡邏較大範圍的區域,但是途中有需要步行檢視時卻以車代步,很容易造成治安上的死角, 這也是應該避免的。(3)因為資源數目增加(譬如增加警力,可再增置巡邏箱)或預定地常有異動 (譬如該銀行遷至他處,不需要設置巡邏箱),所以需要即時而且高效益的配置建議,也就是不 能花費太久的計算時間。(4)很明顯的上述要求不容易藉助純粹人工以紙上作業達成,故需要良 好人機介面的資源配置方法提供決策者檢視配置結果之合理性。 研究預計按照下列步驟完成研究目的所需要的資源分配 DSS。第一步要先為此問題訂出一 個合乎使用者需求的目標函數。以警用巡邏箱配置為例,可根據訪談警察同仁結果,設定一個 合理的兩配置資源間距離σ 做為一判斷依據,σ 可能因都會區或郊區而不同。受限於訪查資料 (台中市區),本研究僅討論都會區的巡邏箱設定。根據此 σ 再進一步訂出合適的目標函數。第 二步要根據與決策者討論後決定的目標函數定義此資源問題,並探究問題的各種特性,此舉有 助於提供決策者正確快速的資訊做出符合需要的資源配置。譬如暸解此問題在計算上非常耗時 (NP-hard),所以花太多時間找出最佳配置 (Optimal Allocation) 並不符合決策者的需求,當務 之急應是設計一個能在短時間內提供高品質配置 (近似最佳解)的資源配置方法,因此需要探究 問題特性後再提出合適的資源配置方法。最後一步是提出合適的資源配置方法,並利用良好的 人機介面將其配置結果以圖形方式呈現,好讓決策者可以很方便地檢視配置結果與避免不當配 置。1.3 研究貢獻
相較於過去資源配置研究,本研究的資源配置 DSS 有以下四點貢獻:第一,此方法可在每 次的配置結果上逐步加入新的資源,之前的配置結果可以不做變動,這個特性恰好是改善此類 漸增式資源配置問題所需要。第二,研究中選用了一個合適的目標函數,確實反應了決策者的 需求,並滿足此問題中兩配置資源間既不能相距太遠也不能相距太近的要求,更改善了過去研 究目標函數(見下節分析)的缺點。第三,本研究選用基因演算法 (Genetic Algorithm; GA) 來解 決此問題,對於此類計算耗時的資源配置決策問題,有效的突變與交配機制會讓解答快速的逼 近最佳解,可讓計算量大幅降低。第四,此方法以地理資訊系統 (Geographic Information System; GIS) 電子地圖顯示資源配置結果,決策者可以很方便地檢查每次的配置決策是否得當,這是 以文字介面的配置方法所無法提供的。
1.4 文章架構
最後本文組織架構將按照以下說明規劃之。第 2 節討論與資源配置距離有關之過去研究, 分析比較各種方法的特性。第 3 節將定義此資源配置問題,列出一些合理假設與限制,然後分 析這個資源配置問題的特性。在第 4 節中以基因演算法與地理資訊系統為基礎設計此資源配置 DSS。第 5 節展示實驗結果,其中實驗資料包括一些模擬的市街圖與真正的派出所轄區圖。最 後一節將根據實驗結果來討論此演算法的適用範圍與未來應用在其他領域的建議。2. 相關研究
本研究所討論之資源配置問題,其特性是允許使用者以漸增方式配置資源,並且要求任兩 資源之配置地點既不能太近也不要相距太遠,與本問題相關或類似的資源配置有以下研究:中 小學校地選址 (王健亞等,民 96;張家生,民 68;張登欽,民 73;陳海燕,民 92;黃世孟、 賴光真,民 84;鍾靜,民 73) 以及在無線區域網路 (Wireless LAN 或 WLAN) 中設置基地台 (Base Station 或 Access Point; 或 AP) (Bertossi et al., 2003; Heuvel et al., 1998; Rozner et al., 2007; Smith et al., 1998; Zander et al., 2000)。學校選址研究主要是解決如何從 m 個文教預定地選取較合適的n 個校地建校,其中 m>n。主要目標是所有使用者 (學童) 至配置地點的平均就學距離 最短,對於兩兩選定之校地並無特殊限制。配置資源時考量的因素除了學區人口、上學距離外, 還需要避免學童上學途中跨越沒有設置天橋或地下道的大型馬路,或是無交通管制的平交道。 另一方面,在無線區域網路研究中,需要將有限的無線頻道 (Radio Channel) 設置給合適的 AP。為了能充分利用有限的無線頻寬,同頻率的頻道可以重覆配置給不同位置的 AP,但前提 是兩 AP 要相距甚遠才不會互相影響。其觀念與辦公室中使用同頻道的室內無線電話機甚為類
344 管理與系統 似,必須設在不同樓層避免互相干擾,這些同頻無線頻道也必須在不會互相干擾的情狀下才可 以重覆利用。所以此類資源配置問題主要目標是利用最少的頻道數目服務最多的使用者,對於 兩兩選定之同頻道配置地點要求相距愈遠愈好。以上的資源配置問題在計算上非常耗時,通常 需要利用一些預先知識以減少其計算量,且問題特性都是以兩兩配置資源間距離為主要考量。 有關校地選址問題的基本觀念是平均配置所有資源。研究 (張家生,民 68;鍾靜,民 73) 都是採用類似線性規劃方法,基本的原理是訂出類似目標函數 Minimize
m i n jd
ijX
ij 1(
1)
(1) 並求出最小值,當運輸平衡時目標函數會有最小值。在此m 為村里數目 (最小劃分單位),n 為 學校數目,dij為學校i 至劃分單位 j 之距離,Xij為布林值 0/1,如果村里 j 的學區為學校 i 則為 1,否則為 0。研究 (張登欽,民 73)採用 P-中位數架構,基本原理是求出目標函數 Minimize
n j m i ij ij j d X 1 ( 1 ) (2) 之最小值,n、m、dij、Xij與之前定義一樣,唯一不同的是ωj的加權(該村里 j 之人數),人數較 多的村里會受到較佳的優待 (通學距離較短)。而研究 (黃世孟、賴光真,民 84) 所採用的方法 需要人力介入調整學區配置,其中除了考慮一般的平均通學距離,還納入許多政策面的因素, 如就學途中安全性、學校周邊環境安全性、學生家長意願、學區劃分基本單位、班級規模與學 校大小等,執行期間需要時常調整參數以因應不同的環境。研究 (陳海燕,民 92) 利用基因演 算法與地理資訊系統解決學區配置問題,試圖求取配置學區時平均就學距離最佳狀況。以上各 方法都是從資源平均配置的角度解決資源配置問題,這些方法較不能滿足本文對於兩兩資源配 置地點的限制與可以漸增資源的要求。舉巡邏箱配置為例,將不足的三組人力以平均配置的觀 念配置到四塊巡邏區域,會造成四個區域的警備工作都做不好;所以不得不暫時犧牲一塊區 域,先做好其中三塊巡邏區域的任務,在爭取到多餘人力後補充到第四塊時,前面三塊的巡邏 箱配置不用異動,只要增加第四塊區域的巡邏箱即可。 另資源配置研究 (王健亞等,民 96) 也是以基因演算法尋求良好的資源配置,雖可提供快 速良好的配置決策建議,亦滿足資源間不可相距太近也不可太遠的要求,但其所挑選之目標函 數在某些特殊情形下會有配置不妥之反例,有違決策者的要求,所以目標函數仍有改進的空 間。該研究中選用小波函數中的墨西哥帽函數公式(3) (如圖 2),表示兩兩選定資源配置地點距 離對整體配置所貢獻的個別效益圖 2 墨西哥帽小波函數,描述兩資源配置地點距離對整體配置所貢獻的個別效益 1 , 0 2 1 ) ( 2 2 2 2 2 3 d e d d d (3) 其中 d 為兩兩選定資源配置地點的距離,σ 為經由訪談而得之經驗參數 (例如設為 σ=300 公 尺),其意義是選定之兩資源配置地點如相距 300 公尺內應予扣分,相距 300 到 350 公尺間應 予加分,超過 400 公尺就沒有太大影響。本來公式(3)大致貼近決策者需求,但經過本研究之觀 察後發現有不良配置的反例存在 (請見圖 3)。雖然公式(3)會給予兩非常接近選定資源配置地點 些許扣分,但仍會形成如圖 3 中這種眾星拱月的情形 (較大巡邏箱圖例代表選中該資源配置地 點)。發生不良配置的主要原因就是相距很近的資源配置地點扣分太少,造成許多很鄰近的位 置 (位於圓周上) 不應該選中卻被選中,如此配置並非決策者所希冀。 圖 3 不當配置舉例,配置結果有如眾星拱月 (較大圖例代表選中該預定地設置巡邏箱) ( d)
0
d
346 管理與系統 另一方面,在無線頻道的資源配置問題中,因為頻寬有限,若能重覆利用即可大幅增加無 線通訊的使用量,但是相同頻道設給兩個相鄰 AP 會產生干擾,所以基本原則是一旦重覆利用 相同頻道,必須分配給相距比較遠的兩 AP。這類問題的目標函數大都訂為 Maximize
j i, Separation(i, j) (4)其中Separation(i,j)是指可能 AP 預定地 i 與 j 的間隔距離 (Bertossi et al., 2003; Rozner et al., 2007),當此目標函數發生最大值時,代表選取的 AP 設定位置不會產生干擾,且能一次服務大 量的行動用戶。但這種解法也不適用於本研究所討論的資源分配問題,理由是雖然本研究中資 源配置問題與這類無線資源配置問題都不喜歡兩服務據點相距太近,但是也要求兩配置資源不 能相距太遠,所以基本目標是不同的。故上述的資源配置辦法不能完全適用於本研究中所討論 的資源配置問題。 以上的資源配置方法應用到本研究的資源配置問題時,因其純粹以距離考量選擇服務據 點,或以人工方式選取符合當前政策的方法都不適合本研究,有以下美中不足之處。(1)過去的 資源配置問題每次有新資源加入後,會全盤推翻之前配置而造成浪費。例如配置巡邏箱問題中 加入新資源的前提是需要保持既有的配置結果,並且在新資源加入後可逐步提高整體效益。(2) 過去的目標函數未必適合於本研究中所討論的資源配置問題,因為純粹以距離考量或是負載平 衡 (Load Balance) 的單一邏輯來主導整個配置過程,會造成設置愈多資源愈佳的假象,譬如建 置愈多小學代表成本(就學距離)愈低,但設置巡邏箱卻未必是愈多愈好,因為任兩巡邏箱需要 既不能相距太遠也不能距離太近,與以往的目標不完全一樣,所以我們必須設計出更合適的目 標函數來滿足此需求。(3)以往以文字介面顯示配置結果的方法在解決這類資源配置問題時,會 有空間資料顯示分析與管理能力不足的問題,如能搭配圖形介面(如電子地圖),配置結果是否 合理將可一目瞭然。所以應該藉由良好人機介面提供視覺上的合理性檢視 (例如使用 GIS),在 分析與顯示這些配置結果的同時,一併考慮大型屏障所帶來的影響與確認鄰近地點是否需要重 覆配置資源,如此方能將不當資源配置或人情關說影響降到最低。(4)警力資源配置常因上級命 令需要立即調整,通常不適合花幾天找出最佳配置,所以需要一個快速提供最佳解或滿意解的 資源配置 DSS。
3. 問題定義
本研究中資源配置問題所用到的符號詳列於表 1,其中 dij代表第i 個至第 j 個資源配置預 定地途中所經過的距離 (單位公尺);wij代表第i 個至第 j 個預定地途中所跨越的路寬總和 (單表 1 符號定義 符 號 說 明 dij 第i 個至第 j 個預定地途中所經過的距離 wij 第i 個至第 j 個預定地途中所跨過的路寬總和 m 資源配置預定地的數目 n 實際設置資源地點的數目 A 可能解答字串長度為m(染色體編碼) (d) ,if . ; 0 if , 1 2 ) / | | 1 ( | | d e d k d d k C(A)
m i m i j Ai A j dij wij A C( ) 1 1 () ( )( ) 位公尺)。m 與 n 分別為資源預定配置地點的數目與資源數目。對於資源配置的結果,以長度 為m 的 0/1 字串 A 來記載,第 i 個字元指明第 i 個預定地是否配置資源,若 A(i)=1 代表預定地 位置i 設置資源,反之則否,所以字串 A 中將有 n 個字元 1。 首先,定義問題的第一步是設計一距離函數描述選定兩兩資源配置預定地間的適合程度, 然後依此函數架構出本問題的目標函數 (Objective Function)。爲改善之前研究 (王健亞等,民 96) 中如圖 3 所顯示之眾星拱月的不當配置情形,本研究中特將兩資源配置地點距離對整體配 置所貢獻的個別效益訂為 . if , , 0 if , 1 ) ( 2 ) / | | 1 ( | | d e d k d kd d (5) 其中d 是兩配置地點間的距離、k 是一個常數(在巡邏箱配置案例中指定為 10)。當 k 愈大時接 近y 軸的 函數值將遞減愈快速,所以較大的 k 值將給予兩鄰近資源較大程度的扣分,如此將 保留前研究公式(3)的好處又可避免如圖 3 中如眾星拱月的不當配置。所以目標函數 C(A)最後 可以訂為
m i m i j Ai A j dij wij A C 1 1 () ( ) ( ) ) (
(6) 因為在自訂函數公式(5)的圖形 (圖 4) 中,距離中心點(或 y 軸)σ 公尺以內效益為負,超過則為 正,也就是兩兩選中資源配置地點相距太近應予以扣分,相距太遠不予加分。另外兩資源配置 地點在道路同側與對側 (有無跨越道路 wij) 也應該給予不同程度的加分或扣分。最後當 C(A) 極大值發生時也就是選定之配置地點既不會相距太近也不會相距太遠。348 管理與系統
圖 4 自訂兩資源配置地點距離對整體配置所貢獻的個別效益
其次,我們為了簡便起見做如下假設:對於某資源配置預定地i 到某資源配置預定地 j 的
路線,以直線來代表之 (避免使用真的巡邏路線),並以該直線所跨過的道路路寬代表兩預定地 間實際巡邏路線所跨過的路寬,如此一來將可省掉一些計算成本又能反應現況。
最後,我們根據上述的目標函數與假設將資源配置問題 (Resource Allocation Problem; RAP) 定義如後:求一最佳資源配置字串A*使得C(A*)有最大值,也就是 Maximize C(A)。
為設計出合適之 DSS 並找出更接近最佳解的近似解,有必要進一步討論 RAP 問題的特性, 以避免在尋求解答過程當中使用不好的邏輯而找到很差的解答。第一,前研究 (王健亞等,民 96)已證明此問題是 NP-hard,所以並不適合利用確定性的演算法 (Deterministic Algorithm) 尋 求最佳資源配置;第二,經觀察後發現 RAP 問題亦無法以負載平衡 (Load Balance) 的觀念解 決,也就是將資源平均配置到所有資源配置預定地未必是最好的策略。以圖 5 為例,在一塊 1000 公尺900 公尺的區域中有 42 個街廓,欲從多處巡邏箱預定地選出三處設置巡邏箱(較大圖例代 表選中該預定地)。如果依負載平衡的觀點,會選出如圖 5(a)的配置方式 (預定地 1,2,3 處),可 是巡邏箱 1,2、2,3 或 1,3 間相距太遠了,會造成全區勤務都有漏洞,而且日後要遞增第四個巡 邏箱時勢必要推翻之前設置而重新規劃。另一方面,若站在決策者的角度,會選擇圖 5(b)的配 置方式 (預定地 4,5,6 處),雖然右上方圓圈處警力不足需要再加強,但其他地方勤務確定沒有 疏失,在日後補充人力時不必全盤調整,只需調整右上方圓圈區域即可。以上舉例顯示出將資 源平均配置到所有預定地未必是解決 RAP 問題最好的策略。
0
d
( d)(a)平均配置 (b)不平均配置 圖 5 平均配置的缺點 (較大圖例代表選中該預定地設置巡邏箱)
4. 以 GA 與 GIS 為基礎之 DSS
因為 RAP 問題中資源數目常有異動,例如巡邏箱配置必須隨時因應警力的多寡重新做調 整,所以利用基因演算法 (林志交,民 91;Blum and Roli, 2003; Goldberg, 1989; Holland, 1992) 解決 RAP 問題是一個很好的選擇。基因演算法利用隨機抽樣的特性,比一般以決定性演算法 (Deterministic Algorithm),如貪婪 (Greedy) 演算法更容易找到全域最佳解 (Global Optimum)。 它有下列的優點與特性 (林志交,民 91;Goldberg, 1989):(1)合適的交配與突變機制可以讓基 因演算法快速收斂,其特性恰好適用於 RAP 問題;(2)諸如此類的資源配置問題不適合用微積 分的手段求取最佳解,但卻可利用基因演算法來解決,原因是基因演算法不會受到解答空間的 不連續性或不可微分特性所影響;(3)一般啟發式演算法 (Heuristic Algorithm) 是利用過去經驗 導引演算法往過去最佳答案處收斂,但過去經驗不一定是全域最佳的,有可能僅找到區域最佳 解 (Local Optimum) 而已;反觀基因演算法具有突變 (Mutate) 的機制,所以能在許多狀況下 突破過去的經驗而找到全域 (Global) 最佳解;(4)貪婪 (Greedy) 演算法的關鍵在於起始解答, 如果沒有從一個合適的起始解答出發,貪婪法永遠無法求得最佳解,而基因演算法卻大有機會 突破目前的困境 (譬如陷在一個區域最佳解中)。基於以上原因,我們選用基因演算法來解決 RAP 問題。 在 RAP 問題中,我們希望減少因人工作業出錯的機會,並希望改善因人情關說所造成不 公正客觀的缺點,所以需要一個更好的資源配置方式可以改善上述缺點。基於以上原因,我們 將配置結果以 GIS 電子地圖呈現,以便在各種場合 (譬如議會質詢) 公開檢視其配置是否合350 管理與系統 宜、作為行政處理上回覆民眾異議或訴願之客觀依據、而且可避免在相近地點重覆配置資源。 綜合上述優點,使用 GIS 確實可以改善現有方法之缺失。 為解決 RAP 問題,將依照圖 6 架構發展出一個以 GA 與 GIS 為基礎的 DSS,其步驟如下。 (1)賦予各資源配置結果一個合適的染色體編碼。(2)決定選擇機制,讓具有較大目標函數值的 染色體有較大的機率存活下去。(3)決定交配機制。(4)設計突變機制。(5)提出解決 RAP 問題之 基因演算法並以 GIS 呈現配置結果。
4.1 染色體編碼 (Chromosome Encoding)
為了將基因演算法套用於 RAP 問題,資源配置預定地選取與否以 0/1 字串表示。以圖 7 為例,解答字串A=101000 代表染色體編碼,意指六筆可能預定地中將挑出兩處設置資源,圖 中染色體表示選中第 1 與第 3 處預定地 (最左方為第 1),染色體的長短也相對反應了問題的大 小,染色體長度愈長代表問題需要的計算量也愈大。4.2 選擇(Selection)
基因演算法執行過程中每一代都會產生眾多染色體,也就是可能解答,其中較優良的染色 體應該有較大的機率將優良特性遺傳給下一代,這正是適者生存所要強調的觀念,所以可能被 選到作為育種親代的機率 (Probability Mass Function; PMF) 可以用一輪盤來表示 (如圖 8),扇圖 6 DSS 架構圖 1 0 1 0 0 0 圖 7 染色體編碼示意圖 (最左方為第 1 處預定地) 開始 基因演算法 (Genetic 停止(滿意解或最佳解) 將配置結果顯示於電子地圖上 地理資訊 系統(GIS) 提供路寬、路線 長度資訊 提供良好 人機互動 介面 提供滿意解 或最佳解
圖 8 輪盤選擇法示意圖 形面積愈大代表被選中的機率也愈高。其中機率pi可以根據染色體Ai的目標函數值C(Ai)設成
i j j i C A C A p ( )/ ( )、piC(Ai)/
jC(Aj)或是pi C2(Ai)/
jC2(Aj),視問題而做不同 的設計;這裡要注意的是,如果優良親代給予非常大的機率,將使其快速收斂,這是其優點; 但是這樣也有缺點,演化初期表現不佳但有潛力走到全域最佳解答的染色體,大有可能喪失被 選中作為育種親代的機會,可能因此找不到全域最佳解,所以要視問題的特性慎選合適的選擇 機率。因為 RAP 問題的目標函數值 C(A)有可能為負,所以取指數後將染色體 Ai適應環境的能 力pi設為 pi=
j A C A C j i e e ) ( ) ( 。 (8) 公式(8)中,第 i 個染色體 Ai的C(Ai)值愈大則意味被選中機率 pi也愈高,也就是非常有機會將 優良基因傳給下一代。4.3 交配 (Crossover)
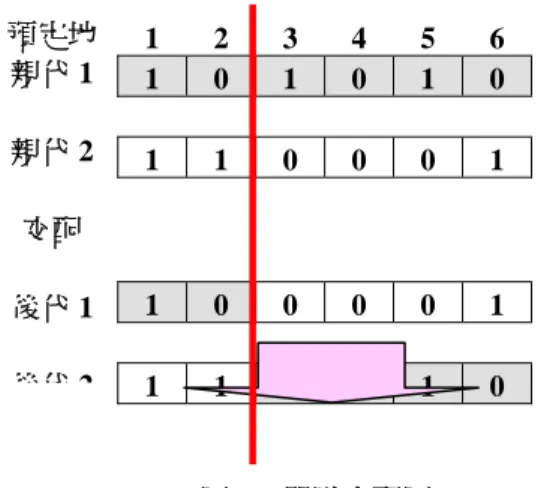
跟生物演化一樣,良好的親代基因要靠著交換才能遺傳給下一代,針對 4.2 節的選擇方法 所挑選出來的親代,可再進行交配來模擬遺傳的特性,加速演算法收斂。其作法是利用雙親的 染色體編碼做互換,互換的方式有許多種,如單點交配(Single-point Crossover)、雙點交配 (Two-point Crossover)、多點交配 (Multi-point Crossover) 或決策者自訂合適的交配方式。本研 究中使用以下兩種交配方式:(1)當資源數目有限且固定時採自訂交配,由隨機訂出的布林遮罩 (林志交,民 91) 控制交配過程,遮罩中標示 Y 的親代相對位置基因交換遺傳給後代 (親代 1 給後代 2,而親代 2 給後代 1),標示 N 的親代相對位置基因不交換。交換前後親代與子代染色 體中字元 1 的數目必須一樣,也就是必須維持一樣的資源數目,如此才是合法的 (Valid) 遮罩; p4 … p100 p3 p2 p1352 管理與系統 (2)當資源充裕時,採單點交配 (林志交,民 91),也就是交換前後親代與子代染色體中字元 1 的數目可能會改變。 當資源有限時,要注意交配前後染色體中字元 1 的數目不可改變。例如圖 9 中的兩個親代 所代表的意義是要在六處預定地中挑出三處配置資源。親代 1 挑選第 2, 4, 6 處,親代 2 挑選第 1, 2, 5 處;交配遮罩控制交配時親代僅能在第 4, 5 兩處做基因交換。交配後所得的兩個後代分 別在第 1, 5, 6 處與第 1, 2, 4 處配置資源,維持交配前後都僅能挑選三處配置資源的題意。此外, 在實作基因演算法時,需注意在交配過程中並非從頭至尾使用同一遮罩,而是在每次兩親代交 配時就隨機訂出遮罩,並檢查是否可保持交配前後的親代與子代字元 1 的數目一致,若不能合 法適用時則需要重新另訂遮罩。 當資源充裕時可以單點作交配,交配前後染色體中的資源數目可以與親代不同。例如圖 10 中的兩個親代所代表的意義是要在六處預定地中挑出三處放置資源。交配點選在第 2 第 3 處預 定地中間,預定地 2 (含) 之前的基因不交換,只交換後面的基因。交配後所得的兩個後代分別 在第 1, 6 處與第 1, 2, 3, 5 處設置資源,交配後資源配置地點的數目將分別變成 2 與 4。如之前 討論,要注意交配後資源配置地點愈多不一定效益愈大 (目標函數值未必愈大)。此外,如果要 將之前配置結果作為基礎繼續新增資源,只要將之前已決定的資源配置預定地的位置都鎖定 (保持始終為 1),就可以保證目前配置決策中將包含之前所有已選定的資源配置地點,如此一 來可以漸增資源並將異動的行政成本降低。 圖 9 自訂交配圖 1 2 3 4 5 6 0 1 0 1 0 1 1 1 0 0 1 0 N N N Y Y N 0 1 0 0 1 1 1 1 0 1 0 0 預定地 親代 1 親代 2 遮罩 交配 後代 1 後代 2
圖 10 單點交配圖
4.4 突變 (Mutation)
尋找全域最佳解答時,僅憑藉交配機制有時不一定能夠找到全域最佳解,所以還需要突變 (Mutate) 的機制來增加找到全域最佳解的機會。基因演算法開始時會產生眾多的初始染色體, 如果這些初始染色體其中之一很接近最佳解,則整個求解過程將大有可能快速收斂並找到全域 最佳解;但是如果沒有任一初始染色體 (隨機給定) 與最佳解相距很近,基因演算法仍能經由 突變機制來逼近最佳解。至於突變要如何應用將視問題特性而不同,基本觀念是由目前的染色 體突變出一個新的染色體,有助於在找最佳解時不會侷限在解答空間 (Solution Space) 的某一 角落。本研究因狀況不同而使用以下兩種突變方式:(1)當資源數目有限且固定時採取自訂交 配,隨機突變前後親代與後代染色體中字元 1 的數目必須一樣,也就是必須維持一樣的資源設 置數目;(2)當資源充裕時,可任意突變,也就是交換前後親代與子代染色體中字元 1 的數目可 能會改變,當資源數目突變到合適大小時目標函數會有最大值。 當資源有限時,要注意突變前後染色體中字元 1 的數目不可改變。如圖 11 所示,本來選 定第 5 處預定地,後來突變換為預定地 2。在實施突變機制時要注意的是突變前後染色體中字 元 1 的數目都是 3,也就是資源數目不能改變。 當資源充裕時,可以任選預定地位置突變,突變前後資源配置地點的數目可以改變。如圖 12 所示,親代本來選定第 1, 5, 6 處共三處預定地,後來突變後變成第 1, 3, 4, 5, 6 處預定地,共 有五處資源配置地點。此外,如果要將之前配置結果作為基礎繼續新增資源,同樣只要將之前 配置結果有配置資源的位置都鎖定 (保持始終為 1),就可以保證目前配置決策中將包含之前所 有已配置資源地點,以降低異動的行政成本。 1 2 3 4 5 6 1 0 1 0 1 0 1 1 0 0 0 1 1 0 0 0 0 1 1 1 1 0 1 0 預定地 親代 1 親代 2 交配 後代 1 後代 2354 管理與系統 1 0 0 0 1 1 突變 圖 11 染色體突變 1 0 0 0 1 1 突變 圖 12 染色體突變
4.5 RAP 演算法
圖 13 介紹如何利用基因演算法解決 RAP 問題,演算法中重覆執行步驟 1 至 4 可以得到決 策者所需的資源配置。解決 RAP 資源配置問題時將依照下列兩種不同狀況找出合適的巡邏箱 配置。第一種狀況是資源有限,只能從m 處預定地中選出 n 個位置 (n 為固定常數)配置資源, 此時可以隨機產生N 個初始親代 Ai (第 0 代),接著根據交配率 pc與輪盤選擇法挑選優良的親代 來交配,N 個初始親代不一定都會被挑到,挑選時需依照 4.2 節的選擇機制,愈優良的親代愈 有可能被重覆挑選。交配方法採取之前 4.3 節所定義之自訂交配,交配前後的親代與後代巡邏 箱的數目 (也就是 n) 要維持一樣,如此將得到 N 個後代。在培育出來的 N 個後代再根據突變 率pm施以突變。被選中突變的染色體隨機挑兩個位置突變 (一處由 0 變 1,一處由 1 變 0,維 持n 不變)。最後評估演算法是否可以停止,如果 C(A)經過幾代後都無法改善,即意味可能已 經找到全域最佳解 (步驟 5)。 第二種狀況是要決定在m 處預定地中要挑出多少處預定地才算合適 (n 是待決定的一個變 數),所以最後資源配置地點數目從 1 到都有 m 可能。演算法開始執行時同樣隨機產生 N 個初 始親代Ai,接著根據交配率pc與輪盤選擇法挑選優良的親代來交配,這裡採取 4.3 節所定義之 單點交配,交配前後的親代與後代巡邏箱的數目未必一樣,如此將得到N 個後代。在培育出來 1 1 0 0 0 1 1 0 1 1 1 1 親代 後代 親代 後代圖 13 RAP 演算法 的 N 個後代再根據突變率 pm施以突變。被選中突變的染色體中隨機挑數個位置突變 (0/1 互 換)。最後評估是否演算法可以停止,如果 C(A)經過幾代後都無法改善,就可以停止演算法 (步 驟 5)。 最後,GIS 將資源配置結果以電子地圖呈現 (步驟 6),並提供使用者良好的人機互動介面。 舉例而言,GIS 可提供任兩資源配置地點的距離、所經過路寬總和等資訊,也可以根據不同的 染色體Ai很快算出目標函數值C(Ai);另一方面,GIS 電子地圖畫面不僅可以文字呈現選中地 點的各項資訊,還可利用不同的圖例或顏色將選中與未選中的預定地同時顯示並加以區別。如 有必要,未來可進一步將街廓依照人口密度或犯罪率等以不同顏色顯示,甚至還可提供各道路 之時速限制、車道數、即時路況影片,作為決策者配置資源之參考。
5. 實驗結果
本研究的實驗參數詳列於表 2。各項實驗均在 Windows XP、Intel Pentium 4 CPU 3.2 GHz、 512M 記憶體環境中進行,以及使用 Borland 公司 Delphi 的整合環境與 MapInfo 公司的地理資
訊引擎。在各項實驗中初始染色體組群大小為N (=100) 個 Ai染色體,它們是隨機選出的N 個 初始染色體;預定演化G (=50) 代後停止;演化時將有 pc (=80%) 比例的親代會交換基因,所 得到的N 個後代中有 pm (=50%) 比例會再施以突變。為驗證 RAP 演算法漸增式配置資源的特 性,我們以警用巡邏箱配置為例,並採用以下四組空間資料:第一組資料的行政區域中無明顯 Algorithm RAP(pc, pm, N, G) INPUT: pc交配率、pm突變率、N 染色體數目、G 演化代數 OUTPUT: A* 最後之最佳染色體(最佳配置字串) begin 步驟 1 產生第 0 代初始解集合(N 個染色體 Ai). for g=1 to G do 步驟 2~5. 步驟 2 根據 pc採輪盤選擇法選擇親代施以 Crossover 得到第 g 代. 步驟 3 根據 pm對第g 代施以 Mutate 以提高該代解答品質. 步驟 4 評估第 g 代解集合(計算 N 個染色體 Ai之C(Ai)). 步驟 5 達到停止條件則中止. 步驟 6 輸出目前最佳配置字串 A*與配置結果(電子地圖). end.
356 管理與系統 表 2 實驗參數 參數意義 預設值 染色體族群大小N (Population Size) 100 演化世代數目G (Generations) 50 交配率pc (Crossover Rate) 0.8 突變率pm (Mutation Rate) 0.5 兩巡邏箱間合適距離參數 (σ) 300 主要幹道或大型屏障,範圍大小約 2000 公尺1600 公尺;第二組資料的行政區域中有一條寬 100 公尺的幹道,範圍大小與第一組一樣;第三組資料為台中市立人派出所轄區實際範圍,大 小約 1800 公尺1800 公尺;最後一組小規模的空間資料專門用於 RAP 演算法的效能分析。 在 5.1 節至 5.3 節中,RAP 演算法將依照下列三種不同狀況為第一、二、三組空間資料配 置巡邏箱。狀況 1 是在所有的巡邏箱預定地中挑出 n 處設置巡邏箱 (n 為固定常數),所得的分 配結果可以作為日後改進的基礎,可再繼續增添新的巡邏箱。狀況 2 是以狀況 1 的配置結果為 基礎再繼續改善的結果 (n 仍為固定常數,但比狀況 1 中的 n 稍大),也就是狀況 1 配置結果並 不做更動,另外在他處增加巡邏箱以增加整體效益,藉以強調本研究漸增式配置資源的概念。 我們假設在狀況 3 中資源充足,RAP 演算法將計算到底要設置幾處巡邏箱 (n 為待決定之變數) 才能既省成本又兼具最佳效益。狀況 2 或 3 都是延續前一狀況之配置結果再繼續改善而得,恰 好可以顯示 RAP 問題需要漸增資源的特性。在 5.4 節中,將以第四組空間資料為例,分析比較 RAP 演算法的配置結果與真正最佳配置結果的差異。5.5 節將討論目標函數公式(6)各參數的意 義與適用情況。
5.1 在警力有限下的巡邏箱配置(狀況 1)
在圖 14 中第一組空間資料有 133 (m=133) 處預定地,要在其中選出 20 (n=20) 處設置巡 邏箱,行政區內沒有大型幹道,其一般道路路寬 (10, 20, 30 與 40 公尺) 是由隨機程式產生。 圖 14 是演化 50 代後的結果 (較大的巡邏箱圖例代表該預定地被選中),相鄰兩兩巡邏箱間的距 離(再加路寬總和)大約都在 300 公尺以上,不會有巡邏箱相距太近,也不會有巡邏箱相距太遠 而產生治安死角,可以看出大致上配置很均勻。但是圖中圓圈處似嫌守備不足,這恐怕要等到 有充足警力可增設巡邏箱時才可解決,很符合決策者對問題的期待。在此圖中也可以看出當初 選擇自訂公式(5)是非常恰當的,因為相距太近的兩處預定地如果都設置巡邏箱,RAP 演算法 會給予很嚴重的扣分,所以不會有如圖 3 眾星拱月的情形發生;另外對於兩兩巡邏箱超過 300 公尺的情形在 RAP 演算法中雖然不扣分,但是給予非常低的加分,表示不鼓勵這樣的設定, 所以挑出來的答案非常吻合當初期望。圖 14 一般道路執行結果,C(A)=44.32,執行時間=576 秒 (較大圖例代表選中該預定地設置巡邏箱) 第二組空間資料除了中間有一條 100 公尺寬的橫貫道路之外,其他一般道路路寬 (10, 20, 30 與 40 公尺) 也都是像上組資料一樣是由隨機程式產生。圖 15 是演化 50 代後的結果,可以 看出大致上配置很均勻。雖然圖 15 與圖 14 一樣都是要設置 20 個巡邏箱,但因 RAP 演算法將 路寬或大型屏障納入考量,所以大型道路對於距離影響有加乘的效果,以致於中間百米幹道兩 側需要設置更多的巡邏箱,也因此守備不足 (圓圈) 處面積比起上圖還要大,此窘況仍然要等 到有充足警力支援後才可解決。 圖 16 (第三組空間資料) 為台中市立人派出所的實際巡邏範圍,當中 159 (m=159) 處預定 地(銀行、醫院、診所等)要選出 20 (n=20) 處設置巡邏箱,其間道路路寬分別為 6, 8, 10, 15, 20, 30 與 40 公尺。經演化 50 代後,圖中較大的 20 個圖例是選中的預定地,與之前模擬數據一樣 可以作到均勻的配置,但也有圓圈處守備不佳的現象,同樣要等到爭取更多警力後才能將漏洞 補好。
358 管理與系統
圖 15 橫貫道路執行結果,C(A)=47.68,執行時間=456 秒 (較大圖例代表選中該預定地設置巡邏箱)
圖 16 台中市立人派出所轄區執行結果,C(A)=48.78,執行時間=642 秒 (較大圖例代表選中該預定地設置巡邏箱)
5.2 以漸增方式改善狀況 1 的巡邏箱配置 (狀況 2)
圖 17 是以第一組空間資料狀況 1 配置結果 (圖 14) 為基礎繼續改善後的配置結果,在 133 (m=133) 處預定地中要選出 25 (n=20+5) 處配置巡邏箱,也就是原來狀況 1 以設置妥當的 20 個巡邏箱不作變動,額外再設置五個巡邏箱以增加整體效益。相較於圖 14,虛線圓圈內之巡邏 箱為新增配置,與起初狀況 1 警力不足時的配置比起來稍有改善 (C(A)較高),而且前後配置沒 有相衝突的地方 (前後兩次配置的巡邏箱相距不會太近也不會太遠),這顯示 RAP 演算法不需 要大幅度異動 (只多增加五處巡邏箱)也能追求 25 個巡邏箱應該有的最大效益,非常符合漸增 資源配置的概念。另外與圖 14 相比,雖然圖 17 中需要配置較多資源 (n 較大),但因圖 17 中 25 處的預定地中有 20 處是鎖定不能變動的,因此可以變動的組合數目並不多,所以執行時間 比圖 14 略少。就第一組空間資料而言,其美中不足之處是 25 個巡邏箱的配置結果仍有漏洞, 守備不足之處仍要等到爭取更多警力後才能將漏洞補好。 同樣再以第二組空間資料狀況 1 的配置結果 (圖 15) 為基礎繼續改善,圖 18 是 RAP 演算 法在 133 (m=133) 處預定地中選出 25 (n=20+5) 處的配置結果,相較於圖 15 多選出五個新的設 置地點 (虛線圓圈內之巡邏箱為新增配置)。與起初狀況 1 警力不足時 (圖 15) 的配置比起來稍 有改善,圖 18 前後配置沒有相衝突的地方;而且與重新配置所有資源所花時間相比,圖 18 的 圖 17 一般道路執行結果,C(A)=60.51,執行時間=393 秒 (較大圖例代表選中該預定地設置巡邏箱)360 管理與系統 圖 18 橫貫道路執行結果,C(A)=62.21,執行時間=384 秒 (較大圖例代表選中該預定地設置巡邏箱) 漸增方式配置資源執行時間明顯較少,並沒有隨著n 變大而增加;這些優點顯示 RAP 演算法 非常適合以逐步漸進的方式處理此類資源配置的問題。同樣地,守備不足之處仍要等到爭取更 多警力後才能將漏洞補好。 圖 19 是以第三組台中市立人派出所轄區狀況 1 的配置結果 (圖 16) 為基礎繼續改善後的 結果,RAP 演算法在 159 (m=159) 處預定地中需要選出 25 (n=20+5) 處設置巡邏箱,也就是要 再增設五處新的巡邏箱。相較於圖 16,虛線圓圈內之巡邏箱為新增配置,整體效益比起圖 16 稍有改善,而且前後配置沒有相衝突的地方。這組實際空間資料所得配置結果與之前兩組模擬 資料所得配置結果一樣合理可行,顯示 RAP 演算法在給定合適參數後確實能滿足使用者需求, 其實用性不僅止於模擬的空間資料。
5.3 在充裕警力下的巡邏箱配置(狀況 3)
我們假設在狀況 3 中資源充足,並且需要決定從第一組空間資料 133 (m=133) 處預定地 中挑出多少處設置巡邏箱 (n=?) 才能具有最大效益。圖 20 是由狀況 2 之圖 17 繼續改善後的結 果,最後選出 52 (n=52) 處設置地點,與起初狀況 1 或 2 警力不足時的配置比起來明顯均勻, 而且值得注意的是被挑中的巡邏箱未必愈多愈好,因為這個資源配置問題與其他資源配置問題 不太一樣,設置過多巡邏箱是一種資源浪費,設置太少又有前面配置不足時的安全漏洞,所以 當配置恰到好處時 (目標函數值最大) 才可有最佳結果,這與當初目標函數是否選用得宜有很圖 19 台中市立人派出所轄區執行結果,C(A)=65.18,執行時間=404 秒 (較大圖例代表選中該預定地設置巡邏箱)
圖 20 一般道路執行結果,C(A)=129.20,執行時間=465 秒 (較大圖例代表選中該預定地設置巡邏箱)
362 管理與系統 大關係。圖中所有選定之巡邏箱不論是之前選定還是本次新增的巡邏箱,都是相距約 300 公尺 (再加路寬總和),非常符合決策者需求,而且不會造成太大異動成本。 同樣地,第二組空間資料 (m=133) 在狀況 3 也需要決定合適的巡邏箱數目 (n=?),圖 21 是由狀況 2 之圖 18 繼續改善後的結果,RAP 演算法最後選出 59 (n=59) 處巡邏箱設置地點, 比起警力不足時的配置 (圖 18) 明顯均勻,不會有巡邏箱相距太近,也不會有巡邏箱相距太遠 而產生治安死角。此外,與圖 20 相較,同樣大小的區域卻需要設置較多的巡邏箱,理由是中 間百米幹道兩側需要擺放較多的巡邏箱,致使整體資源配置需要比圖 20 所用的巡邏箱還多。 圖 22 是從狀況 2 之台中市立人派出所轄區配置結果 (圖 19) 繼續改善而得,最後從 159 (m=159) 處預定地選出 30 (n=30) 處巡邏箱設置地點,代表該地區需要設置這個數量的巡邏 箱,超過這個數目是一種資源浪費,低於這個數目又有安全漏洞,這個數字可以爲該派出所配 置巡邏箱資源時提供合適建議。圖中所有選定之巡邏箱不論是之前選定還是本次新增的巡邏 箱,距離加上所跨越的路寬總和大都為 300 公尺,由此也可以看出當資源充裕時所得的配置結 果自然可達整體最大效益。 圖 21 橫貫道路執行結果,C(A)=143.31,執行時間=460 秒 (較大圖例代表選中該預定地設置巡邏箱)
圖 22 台中市立人派出所轄區執行結果,C(A)=73.14,執行時間=678 秒 (較大圖例代表選中該預定地設置巡邏箱) 圖 23 顯示資源數目(n)對於台中市立人派出所巡邏箱配置整體效益 C(A)的影響,此圖不但 有利讀者觀察本研究如何設定合適的n 參數,也同時反應漸增資源到了某程度應該適可而止。 圖中曲線反應了在一開始資源不足 (n 較小) 時其整體效益不是很好,但陸續漸增資源後 (n 漸 增)效益曲線逐漸遞增,增加到某一程度時整體效益到達最高,若再繼續增加資源 C(A)不增反 降。此現象說明使用者配置資源時應該適可而止,不可恣意增加資源,否則整體效益未見改善 又形成資源浪費。值得留意的是,在資源充足時的狀況 3 (圖 22) 中,RAP 演算法不需要任何 人工介入,即可自動決定合適的資源數目 (n=30) 並達到最大效益,充分顯示出 RAP 演算法可 以同時兼顧成本效益與方便性。
5.4 本方法之資源配置結果與最佳配置結果之比較
表 3 比較了本研究資源配置結果與真正最佳配置結果。因為前三組空間資料的資料量較大 (例如 m=159 與 n=23) 而此問題又是一個極為費時的 (NP-hard)C
nm挑選難題,計算上會需要考 慮許多不同的配置組合 (如 7.31026 ),這通常是一個天文數字,所以使用規模較小的第四組空 間資料 (圖 24) 為實驗對象來觀察本研究的解答品質,圖中有 36 個 225 公尺225 公尺的街廓 (m=36),路寬皆為 25 公尺,每個街廓的中心都是一個配置資源預定地。表 3 中的第一行代表 欲觀察不同的資源數目(n),第二、三行分別代表 RAP 演算法所能求得最大效益 C(A)與執行所364 管理與系統 0 25 50 75 5 10 15 20 25 30 35 40 45 50 n C (A ) 圖 23 資源數目 n 對於台中市立人派出所巡邏箱配置整體效益 C(A)的影響 表 3 本研究資源配置結果與最佳配置結果之比較 本研究結果 最佳配置結果 n C(A) 執行時間(秒) C(A*) 執行時間(秒) 2 0.887 24 0.887 25 4 4.543 25 4.543 25 6 8.353 25 8.353 32 8 12.708 25 12.708 212 10 17.101 26 17.110 2663 12 22.940 25 23.143 16570 圖 24 第四組空間資料(m=36)
花時間,第四、五行是利用一個窮舉搜尋 (Exhaust Search) 程式所求出的最佳效益 C(A*)與執 行時間。在這些數據中可看出本研究所提出的配置建議幾乎都是最佳解答 (除了 n=10, 12 之 外),而且在這個 m=36 案例中,RAP 演算法執行時間全都在 26 秒以內 (沒有太大變化),但窮 舉搜尋程式執行時間在n=12 時卻需費時 16570 秒 (快速增加中)。根據上述觀察,此類資源分 配問題不適合以一般方法求出最佳解答;相對而言,RAP 演算法卻可在短時間內為此類資源配 置問題找到高品質的近似最佳解。
5.5 目標函數中各參數的設定
不同的使用者對於類似資源配置問題可能有不同的需求,所以使用者可以自行設定目標函 數公式(6)中各種具有不同功效的參數,使得最後資源配置結果能真正切乎自己的需求。在此小 節以警用巡邏箱配置為例,探討各參數的意義與適用情況。以下實驗使用第一組空間資料並配 置 10 個巡邏箱 (m=133, n=10),除非有特別說明,所有參數都使用預設值。 公式(6)中,常數 k 所扮演的角色是防止兩兩資源相距太近,k 值愈大代表兩相近資源扣分 愈多。針對巡邏箱配置案例而言,圖 25(a)出現眾星拱月現象 (此時 k=1) 無疑是一種不當配置, 但是在k=10 或 k=100 時,圖 25(b)與(c)的配置結果都沒有上述不當配置情形,代表使用較大的 k 值即能滿足警察同仁的需求 (避免眾星拱月現象),但常數 k=10 不足以應付所有類似資源配 置問題,主要原因是不同資源配置問題的使用者可能採用不同的值,愈大的值所造成眾星拱 月的圓圈 (請見圖 3) 也愈大,需要更大的 k 值來抵銷這種效應。綜合上述觀察,較大的 k 值既 不會造成如眾星拱月般的不當配置,也不會影響執行時間,所以對於類似資源配置問題,為避 免k 值太小會造成資源相距太近的不當配置,或是不同的使用者因其個人偏好造成不同的決策 結果,DSS 設計者可將 k 設為一大常數 (如 k=10000),即可避免大多數類似問題 (譬如巡邏箱 配置問題或校地選址問題)如眾星拱月般的不當配置,並可省卻使用者設定 k 值的麻煩。不過, 使用較大k 值時有一副作用值得注意,只要兩配置資源稍微接近(低於控制的最適距離),目標 函數C(A)就會被嚴重扣分,因此 DSS 在挑選某配置資源的鄰近預定地時,如果週邊預定地沒 有一個恰好位於最適距離公尺處,DSS 會寧願選取較遠的預定地 (例如 +30 公尺處),而不 挑選略低於最適距離的預定地 (例如 -5 公尺處),這將造成近似最佳解答或可接受解答的數目 變得較少,但這並不影響最終結果之實用性。 在公式(6)中扮演的角色是控制兩資源的最適距離,使配置結果符合該類資源配置問題使 用者的需求。當兩資源距離略大於時對整體效益會有較大的加分,若兩資源距離小於應該如 何扣分則依不同k 值設定給予不同的扣分。圖 25 中使用三種不同的值,也因而產生三種不同 的配置結果。以圖 26(b)為比較基準 (=300),圖 26(a)因為使用最小的值 (=100),所以造成 各資源相距較近;反觀圖 26(c)使用最大的值 (=500),所以造成各資源相距較遠。根據上述366 管理與系統 (a) k=1,執行時間=463 秒 (b) k=10,執行時間=450 秒 (c) k=100,執行時間=448 秒 圖 25 k 對於資源配置結果的影響 (較大圖例代表選中該預定地設置巡邏箱)
(a) =100,執行時間=452 秒
(b) =300,執行時間=463 秒
(c) =500,執行時間=440 秒
圖 26 對於資源配置結果的影響
368 管理與系統 觀察,若應用 RAP 演算法在類似資源配置問題時,使用者應根據問題的特性以及個人本身經 驗來指定值,例如在巡邏箱配置問題中,警察局同仁可選用=300 代表該類資源都應該相距 300 公尺以上;或在學校選址問題中,縣市政府教育局人員可指定=1000 代表該類資源都應該 相距 1000 公尺以上,如此配置結果才能符合該類問題使用者對於教育資源的需求。 研究中雖然距離d 是以簡單的兩點間直線距離代替實際路線距離,但並不影響此方法的實 用性。使用者應用此方法解決類似資源配置問題時,可做調整如下:首先,按照使用者需求先 準備實務上的各項資料,如路寬、路長、單/雙向車道數目、尖峰時段、紅綠燈時間等現實世界 各種資訊;其次,選擇符合使用者需求的距離定義,例如最短車行時間距離、最短步行時間距 離、最短路線距離等;最後,將公式(6)中直線距離 d 換成以下任何一種現成解決方案中的距離 函數,如 ESRI 公司 ArcGIS Network Analyst 產品的 Optimum Route 功能、NET Engine 產品的 Shortest Path 功能 (ESRI, 2008)、或是 MapInfo 公司 Envinsa、Routing J Server 產品中的 Logistics 功能 (MapInfo, 2008),甚至使用者可自行開發合適的距離功能 (End User Computing; EUC) (DANIWEB, 2008);以上各種距離函數選項的特色與適用情況詳列於表 4,使用者可以根據不 同情況選用合適的距離函數d,或是自行修改替換公式(6)中的距離函數 d,所以在解決類似資 源配置問題時,RAP 演算法仍可保有相當的實用性。 在與距離有關的資源配置問題中,若每個預定地重要性不同,RAP 演算法也可以斟酌各個 預定地之重要性給予不同的加權,請見以下舉例與說明。在巡邏箱配置案例中,原本利用 DSS 配置巡邏箱的動機之ㄧ即是要避免人情關說,不宜獨厚任何行業,所以我們將所有預定地看作 同等重要,不針對某些預定地給予差別待遇,但是在其他狀況下,預定地的重要性可能不盡相 同,必須加以考慮。譬如在巡邏箱配置問題中,如果有數個預定地常發生搶案,使得這幾個預 定地在使用者判斷之下相對重要,使用者可賦予各預定地一個權重來強調其重要性;或是如(張 登欽,民 73)校地選址問題中,作者考慮用村里人口作為權重,以強調人口多的村里應該較有 機會設校。也因此當類似資源配置問題中預定地存在不同的重要性時,原目標函數公式(6)可調 整成以下公式(9)或(10),其中 ωi可以為線性加權 (公式(9)),也可以為指數加權 (公式(10)),其 目的是將含有這幾個重要預定地的染色體給予較大的被選中機率,因為只要染色體中的重要預 定地(有較大權重)相關字元都為 1,公式(9)或(10)的整體效益就會因為這些權重而明顯增大,公 式(8)中該染色體被選中機率也就因此增加。以上說明顯示在實際應用 RAP 演算法解決類似資 源配置問題時,除了考量直線距離及跨越的路寬之外,還可考慮不同預定地的重要性與權重; 至於選用何種加權方式與如何設定權重大小,必須與具有相關領域知識 (Domain Knowhow) 的 使用者討論後才能決定,最後公式(9)或(10)才能真正反應愈重要的預定地應該愈有可能被選 中。
表 4 各種距離函數選項的特色與適用情況 各種選項 特色 適用情況 ESRI 公司之 商用套件 1.可提供最短路線距離 2.可提供最短行車時間距離 3.可支援各種資料庫連結 4.可節省 DSS 開發時間 5.可提供許多與產品有關的 售後服務與教育訓練 6.可支援多種作業系統 1.DSS 需要較精準的距離,譬如鋪設光纖纜線 需要配置人孔時,兩人孔間的距離與佈線長 度需要比較精準的估算,所以距離函數應該 選用最短路線距離 2.需事先購置或準備各項空間資料,如路寬、 路長、單/雙向車道數目等,作為距離函數之 輸入參數 3.需花費額外的軟體權利金,通常與使用者人 數成正比 4.需要整合微軟 Windows 以外的作業系統 MapInfo 公司之商用 套件 1.可提供最短路線距離 2.可提供最短行車時間距離 3.可節省 DSS 開發時間 4.可支援各種資料庫連結 5.可提供許多與產品有關的 售後服務與教育訓練 1.DSS 需要較精準的距離,譬如鋪設光纖纜線 需要配置人孔時,兩人孔間的距離與佈線長 度需要比較精準的估算,所以距離函數應該 選用最短路線距離 2.需事先購置或準備各項空間資料,如路寬、 路長、單/雙向車道數目等,作為距離函數之 輸入參數 3.需花費額外的軟體權利金,通常與使用者人 數成正比 EUC 1.允許使用者各有不同的 需求,每個人可自訂距離函 數 2.毋須負擔額外的軟體權利 金 1.DSS 僅需要概略的距離,譬如估算學童就學 距離時,可以僅利用直線距離函數即可 2.DSS 需要特殊的距離計算,且商業套件沒有 提供類似選項,所以該距離函數只能憑藉 EUC 完成 3.需要花費較多的 DSS 開發時間 4.DSS 設計者與使用者需具備相關 GIS 的知識
mi i mji Ai A j dij wij A C 1 1 () ( ) ( ) ) (
(9)
m i m i j ij ij i w d j A i A A C 1 1 () ( ) ( ) ) (
(10) 以上實驗結果與說明除能顯示本文所提方法確實可以避免傳統方法不當配置之外,或許也 可以提供其他領域類似的資源配置問題參考之用。在警察同仁反覆檢視電子地圖配置後,確認370 管理與系統 不會發生鄰近地點重覆設置巡邏箱並且不必推翻之前配置,所以對該決策者而言此配置結果屬 於滿意解;並且這些結果經由電子地圖呈現後,既可做為內部資源配置之用,又可做為對外答 詢民意代表質詢或遊說最有利又淺顯易懂的說明資料。另一方面,由於此法可以成功運用在警 用巡邏箱配置問題,其觀念或許可供其他與空間距離息息相關的資源配置研究參考之用;例如 在學區規劃研究中,這類資源配置問題的特點不完全強調整體的平均效果是否良好,反而較要 求配置結果可以前後相容,不必每次資源配置都推翻之前配置結果,正好可以參考本研究結果。
6. 結論與建議
本研究提出一個可以漸增方式配置資源的 DSS。配置資源時,所提出的基因演算法可同時 考慮資源配置地點不會相距太近或太遠,非常吻合決策者的需求。相對於過去的資源配置方 法,本研究有以下四點貢獻。第一,在執行資源配置時可在過去的配置結果上再做改進,而不 是全盤推翻過去的配置重新再做一次。當有額外資源新增時,此方法可以逐步漸增的方式配置 資源,過去的已配置資源與新增的資源仍能結合而成一個新的合適配置。第二,本研究針對 RAP 問題為決策者定義了一個合適的目標函數。自訂公式(5)定義中兩兩資源配置地點的效益, 此公式恰好可避免資源配置地點不是相距太近就是相隔太遠的不當情形,完全反應出決策者對 於資源配置問題的期待。第三,本研究選用了合適的基因演算法。利用基因演算法解決這類不 合適以微分手段求解的資源配置問題,並且充份利用基因演算法快速收斂的特性,恰好可為決 策者在解決資源時常異動的 RAP 問題時提供快速高品質的配置決策建議。第四,研究中介紹 了一個視覺化的資源配置介面。利用此介面可以很簡單的檢視大型屏障如公路或鐵路對於資源 配置的影響;並且將最後資源配置結果以電子地圖顯示出來,可以很容易且公開的檢查其配置 合理性,所以能避免因人為疏忽或人情關說所造成的不當配置。 未來研究可以加入犯罪率、人口密度與車流量等其他考量,對於犯罪率高與人口密度高的 區域應該設置較為密集的資源,這將使得配置問題更困難,但其配置結果將更符合實際需要。參考文獻
王健亞、游清柱、陳海燕、陳致超,「利用基因演算法解決警用巡邏箱選址問題-以台中市立 人派出所為例」,中華民國九十六年全國計算機會議,台中:中華民國電腦學會,民國 96 年, 40-49 頁。 林志交,「基因演算法於模型影像套合計算之應用」,國立成功大學測量工程學系未出版碩士論 文,民國 91 年。張家生,「計量管理應用於校址選擇與學區劃分之研究」,國立政治大學企業管理研究所未出版 碩士論文,民國 68 年。 張登欽,「國民中學學校、規模、區位、學區劃分之研究-台北市松山區實證探討」,國立中興 大學都市計劃研究所未出版碩士論文,民國 73 年。 梁定澎,決策支援系統與企業智慧,台北市:智勝文化,民國 95 年。 黃世孟、賴光真,「都市地區國民中學學區劃分多準則評估模式之建立」,中華民國建築學會建 築學報,第十三期,民國 84 年,89-104 頁。 陳海燕,「一種自動化區域規劃演算法」,私立東海大學資訊工程與科學研究所未出版碩士論 文,民國 92 年。 鍾靜,「線性規劃應用於學區劃分之研究」,私立淡江大學管理科學研究所未出版碩士論文,民 國 73 年。
Bertossi, A. A., Pinotti, C. M., and Tan, R. B., “Channel Assignment with Separation for Interference Avoidance in Wireless Networks,” IEEE Transactions on Parallel and Distributed Systems, Vol. 14, No. 3, 2003, pp. 222-235.
Blum, C. and Roli, A., “Metaheuristics in Combinatorial Optimization: Overview and Conceptual Comparison,” ACM Computing Surveys, Vol. 35, No. 3, 2003, pp. 268-308.
DANIWEB, http://www.daniweb.com/forums/post614801.html, 2008.
ESRI, ArcGIS Network Analyst, http://www.esri.com/software/arcgis/extensions/networkanalyst/ index.html, 2008.
ESRI, NetEngine, http://www.esri.com/software/netengine/about/overview.html, 2008.
Goldberg, D. E., Genetic Algorithms in Search, Optimization, and Machine Learning, 1st ed., MA: Addison-Wesley, 1989.
Heuvel, J. V. D., Leese, R. A., and Shepherd, M. A., “Graph Labeling and Radio Channel Assignment,” Journal of Graph Theory, Vol. 29, No. 4, 1998, pp. 263-283.
Holland, J. H., Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence, 2nd ed., MA: MIT Press, 1992. Lee, R. C. T., Tseng, S. S., Chang, R. C., and Tsai, Y. T., Introduction to the Design and Analysis of
Algorithms, 1st ed., Singapore: McGraw-Hill, 2005.
MapInfo, Envinsa Platform and Routing J Server SDK, http://www.mapinfo.com/solutions/ capabilities/logistics, 2008.
372 管理與系統
Rozner, E., Mehta, Y., Akella, A., and Qiu, L., “Traffic-Aware Channel Assignment in Wireless LANs,” ACM SIGMOBILE Mobile Computing and Communications Review, Vol. 11, No. 2, 2007, pp. 43-44.
Smith, D. H., Hurley, S., and Thiel, S. U., “Improving Heuristics for the Frequency Assignment Problem,” European Journal of Operation Research, Vol. 107, No. 1, 1998, pp. 76-86.
Zander, J., “Trends in Resource Management Future Wireless Networks,” In IEEE Wireless Communications and Networking Conference (WCNC), Chicago: IEEE Communications Society, 2000, pp. 159-163.