國
立
交
通
大
學
電控工程研究所
碩
士
論
文
三相永磁同步馬達之
線圈開路故障偵測及其過渡控制
Detection of Open-Winding Faults
in Three-Phase PMSMs
and It’s Drive-Through Control
研 究 生:巫 志 軒
三相永磁同步馬達之
線圈開路故障偵測及其過渡控制
Detection of Open-Winding Faults
in Three-Phase PMSMs
and it’s Drive-Through Control
研 究 生:巫志軒 Student:Zhi-Xuan Wu
指導教授:陳鴻祺 Advisor:Hung-Chi Chen
國 立 交 通 大 學
電控工程研究所
碩 士 論 文
A ThesisSubmitted to Institute of Electrical Control Engineering College of Electrical and Computer Engineering
National Chiao Tung University in partial Fulfillment of the Requirements
for the Degree of Master
in
Electrical Control Engineering
May 2013
Hsinchu, Taiwan, Republic of China
三相永磁同步馬達之
線圈開路故障偵測及其過渡控制
研究生:巫志軒
指導教授:陳鴻祺 博士
國立交通大學電控工程研究所
摘要
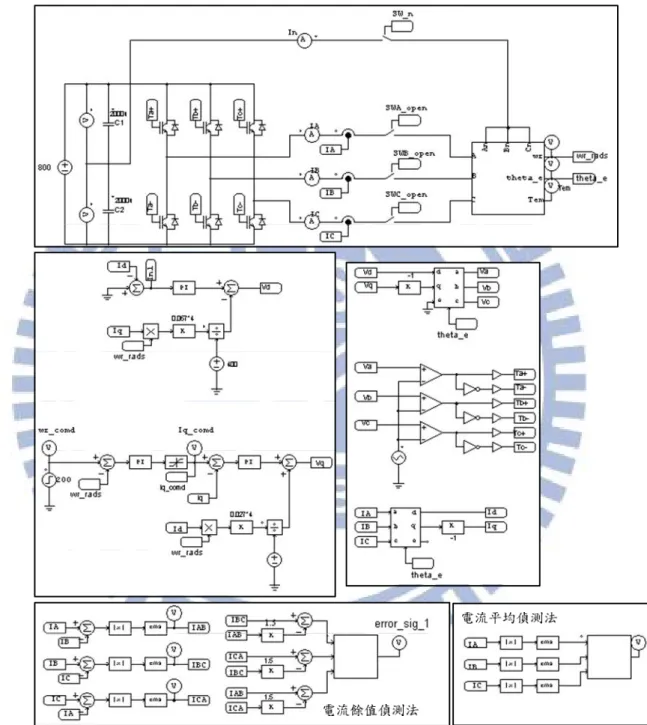
本論文以 FPGA(Field Programmable Gate Array)為控制器,描述以單組反流 器供電實現三相永磁同步馬達之線圈開路故障偵測及過渡控制。首先從分析三相 馬達的等效模型開始,接著利用數學推導結果設計出控制架構,並討論線圈開路 故障偵測與過渡控制架構。本論文以平均電流偵測法與電流餘值偵測法來實現故 障偵測,探討兩種不同的偵測技術之錯誤偵測情況與其偵測速度,再進行模擬與 實作來驗證三相永磁同步馬達之線圈開路故障偵測與過渡控制的可行性,並且比 較兩種故障偵測技術之適用情況。
Detection of Open-Winding Faults
in Three-Phase PMSMs
and it’s Drive-Through Control
Student:Zhi-Xuan Wu Advisor:Hung-Chi Chen
Institute of Electrical Control Engineering
National Chiao Tung University
Abstract
This thesis presents the implementation of the open-winding fault detection and it’s drive-through control for one three-phase Permanent-Magnet Synchronous Motor(PMSM) fed by voltage-source-inverter(VSI) in a FPGA-based system. From the equivalent model of the Three-phase PMSM, then we use conclusion of the mathematical derivation to design the control architecture and discuss the architecture of open-winding fault detection and driving-through topology. This thesis presents the average current detection method and the current residual value detection method to achieve fault detection, and explore two different detection technologies to the error fault detection and the fault detection speed, then the simulation and implementation to validate the feasibility of the open phase fault detection and control for PMSM. Finally, a comparison between the advantages and disadvantages of the two fault detection technologies.
誌謝
首先我要感謝我的指導教授陳鴻祺博士,在本文創立的時候給予我的教誨, 一路上細心的帶領使本論文得以順利完成。在老師的指導下,除了讓我對這個領 域有長足的進步外,也更深刻的體會自己的不足,需要多方的學習與調整,在此 對老師致上由衷的感謝。此外,感謝口試委員廖益弘博士以及蔡憲逸博士,對論 文的方向以及發展給予許多的指教以及寶貴的意見。 在交大的研究生涯中,在實驗室認識了許多的朋友,在朝夕相處切磋琢磨之 間,使我在各方面都有進步,並且了解合作的真諦。感謝學長振宇、宏和、修哲、 威諭與智豪在課業上的指導,與生活經驗的分享。感謝同學文仁再碩班生涯一起 成長、互相鼓勵。感謝學弟又瑋、宗辰、韶儒、起行、大開、立明與王榮,讓我 在最後一年的生活中,還是充滿各形各色的樂趣,沒有你們,研究的生涯是單調 而苦悶的。最後感謝我的父母,給予我經濟以及精神上的依靠,使我能夠專心的 在學業上努力。感謝在一路上陪伴著我的各位,在各方面對我的支持,使我成長, 謝謝你們。目錄
摘要 ... I Abstract ...II 誌謝 ... III 第一章 緒論... 1 1.1 研究背景與發展現況... 1 1.2 故障類型以及因應措施... 2 1.3 研究目的... 4 1.4 本文架構... 4 第二章 三相永磁同步馬達模型與控制策略 ... 5 2.1 三相永磁同步馬達模型... 5 2.2 三相平衡相序 ... 7 2.3 三相永磁同步馬達模型... 9 2.3.1 三相二極永磁同步馬達參數及方程式推導 ... 9 2.3.2 在同步旋轉軸參考座標 q-ds 軸下的三相二極永磁同步馬達... 14 2.3.3 三相 P 極永磁同步馬達參數及方程式... 17 2.3.4 馬達電流與馬達轉矩的關係... 20 2.4 馬達線圈開路故障方程式推導 ... 21 2.4.1 馬達線圈開路故障方程式推導... 21 2.5 線圈開路故障控制架構... 26 第三章 三相永磁同步馬達開路故障偵測 ... 29 3.1 開路故障偵測 ... 29 3.1.1 平均電流偵測法... 31 3.1.2 電流餘值偵測法... 37 3.2 開路故障偵測模擬 ... 42 3.2.1 馬達參數及 PSIM 模型建立 ... 42 3.2.2 馬達開路故障偵測模擬 ... 46 3.2.3 平均電流偵測法偵測錯誤區域... 47 3.2.4 電流餘值偵測法偵測錯誤區域... 51 3.2.5 電流平均偵測法偵測模擬 ... 53 3.2.6 電流餘值偵測法偵測模擬 ... 54 3.3 開路故障過渡控制模擬... 55 第四章 實作電路與結果 ... 57 4.1 實作電路... 57 4.1.1 實作電路架構與平台 ... 574.1.2 開關驅動電路... 60 4.1.2 編碼器轉換電路... 61 4.1.3 數位類比轉換電路(DAC、ADC)... 62 4.2 馬達開路故障偵測實作... 63 4.2.1 平均電流偵測法錯誤偵測實作... 63 4.2.2 電流餘值偵測法錯誤偵測實作... 64 4.3 馬達開路故障過渡控制... 67 4.3.1 平均電流偵測法實作 ... 67 4.2.4 電流餘值偵測法實作 ... 70 第五章 結論... 71 參考文獻 ... 72
圖目錄
圖 1.1 正常狀況與線圈開路故障因應措施之電路架構 ... 3 圖 2.1 三相馬達工作原理 ... 6 圖 2.2 馬達感應電動勢波形... 7 圖 2.3 改變轉向之馬達感應電動勢波形 ... 8 圖 2.4 三相二極永磁同步馬達... 9 圖 2.5 馬達轉速與轉矩方塊圖... 19 圖 2.6 三相 P 極永磁同步馬達馬達方塊圖 ... 19 圖 2.7 三相馬達轉速控制方塊圖... 20 圖 2.8 開路故障前之電流空間向量 ... 21 圖 2.9 b 相線圈故障發生前與發生後之電流相位關係 ... 23 圖 2.10 (a)a 相及(b)c 相線圈開路發生前後之電流相位關係... 24 圖 2.11 三相永磁同步馬達開路故障控制架構... 26 圖 2.12 開關電路示意圖 ... 26 圖 2.13 開關命令方塊圖 ... 27 圖 2.14 空白時間示意圖 ... 28 圖 3.1 故障偵測架構圖 ... 29 圖 3.2 電流平均偵測法 ... 31 圖 3.3 取樣週期與電流平均值之關係 ... 32 圖 3.4N固定之平均電流偵測法 ... 34 圖 3.5N可變之平均電流偵測法 ... 36 圖 3.6 電流餘值偵測法 ... 37 圖 3. 7(a)I 、ab I 、bc I 電流波形(b)(c)不同轉速下之ca Iab 、Ibc 、 Ica 電流波形 38 圖 3.8N固定之電流餘值偵測法 ... 41 圖 3.9 三相永磁同步馬達模型模擬等效電路圖... 43 圖 3.10 轉矩方程式模擬電路圖... 44 圖 3.11L 互感項模擬電路圖... 45 B 圖 3.12 三相永磁同步馬達開路故障模擬電路圖... 46圖 3.13 轉速、轉矩波形與不同N值下的故障偵測訊號... 48 圖 3.14N隨轉速變化下之故障偵測掃描... 50 圖 3.15 轉速波形與不同K值下之故障偵測訊號... 52 圖 3.16 平均電流偵測法在不同固定取樣個數N下之偵測速度 ... 53 圖 3.17 電流餘值偵測法在不同K值下之偵測速度... 54 圖 3.18 馬達中性點未連接電容中點時之轉速及轉矩 ... 55 圖 3.19 馬達中性點連接電容中點時之轉速及轉矩 ... 56 圖 4.1 實作整體架構 ... 57 圖 4.2 實作電路照片 ... 58 圖 4.3 實作馬達照片 ... 59 圖 4.4 開關驅動電路 ... 60 圖 4.5 編碼器轉換電路 ... 61 圖 4.6 數位類比轉換電路 ... 62 圖 4.7 平均電流偵測法之錯誤偵測區域(RL 200) ... 63 圖 4.8 平均電流偵測法之錯誤偵測區域(RL 100) ... 64 圖 4.9 平均電流偵測法之錯誤偵測區域驗證... 65 圖 4.10 電流餘值偵測法之錯誤偵測(RL 200) ... 66 圖 4.11 馬達三相電流波形以及故障偵測訊號... 67 圖 4.12 平均電流偵測法在不同固定取樣個數下之故障偵測速度 ... 68 圖 4.13 平均電流偵測法在不同固定取樣個數下之故障偵測速度 ... 69 圖 4.14 電流餘值偵測法在(a)K 1.1(b)K 1.5(c)K 1.9下之故障偵測速度 ... 70
表目錄
表 2.1 正常情況下與三相線圈開路(中性點未接電容中點)之電流及轉矩... 25 表 2.2 三相線圈開路(中性點已接電容中點)之電流及轉矩... 25 表 3.1 故障訊號與各相開路故障之關係 ... 30 表 3.2 取樣週期與故障偵測範圍... 35 表 3.3 三相永磁同步馬達參數... 42 表 4.1 實作相關參數 ... 59第一章
緒論
1.1 研究背景與發展現況
隨著工業的快速發展,馬達廣泛的被應用於產業自動化與電腦相關產品。直 流馬達的優點是控制容易,只要改變電樞電壓就可達到變速的目的,最早為工業 界運用於各類機械負載驅動器。然而,傳統直流有刷馬達的電樞位於轉子,必須 使用換向片與定子的碳刷接觸,當馬達旋轉時兩者摩擦容易產生火花,使得傳統 直流有刷馬達不適用於多塵、易爆的特殊場合。而且碳刷必須經常維護,降低了 直流有刷馬達的可靠度。近年來,一種名為直流無刷馬達(Brushless DC motor, BDCM)具有交流馬達結構簡單、不需維護及沒有火花產生之優點,並且不具像 感應馬達有滑差(slip)的缺點,而效率也較感應馬達高,但最大的缺點在於控制較 為複雜。但因隨著磁場導向控制(Field-Oriented Control, FOC)與微處理器的進 步,也使得直流無刷馬達的實際應用逐漸成熟,目前已被廣泛應用在精密機械、 電腦週邊及消費性電子產品等裝置中。 儘管直流無刷馬達大量的運用於工業應用中,系統的可靠度仍然是需要被關 注的問題,在運轉過程中發生如線圈開路故障、軸承故障、開關元件故障或是感 應器故障等等之問題而影響馬達運轉的穩定性,如高轉矩、大轉速漣波、無法啟 動等馬達運轉性能降低之問題可能是在馬達運作中所不被接受的,尤其是在被要 求操作在連續運轉之過程中,因此馬達的容錯控制(Fault tolerant operation)可說是 一項不可或缺的重要課題。1.2 故障類型以及因應措施
由於需考慮到系統運行的可靠性和安全性,如今故障偵測和因應措施日趨重 要,在[1]-[3]中的故障類型為機械方面的故障,包括了馬達定子鐵芯故障、轉子 斷裂以及滾動軸承故障。此外在電路方面的故障包括了馬達線圈的開路或短路所 造成的故障[4]-[17]以及在[18]-[22]中探討了開關所造成的故障。而在[23]中,說 明了感應器故障所造成的系統故障問題以及因應方法。本論文將著重於線圈開路 故障之分析,以下將介紹當線圈開路故障發生時所採用的幾種因應措施,圖 1.1(a) 為在正常狀況下的三相馬達反流器,馬達定子線圈使用 Y 接接法。圖 1.1(b)為三 相六開關反流器,三相線圈哪一相故障則開關 S 便接至相應之線圈。圖 1.1(c)為 另一種三相六開關反流器,當故障發生時,將馬達中性點經由一顆繼電器連接至 電容中點,本文將採用此種架構進行分析。圖 1.1(d)為三相八開關反流器,將馬 達中性點經由一顆繼電器連接至第四臂開關中點。 圖 1.1(b)和圖 1.1(c)相較之下,後者由於在故障發生時,僅需將馬達中性點 接至電容中點,可以不必偵測是由哪一相的線圈發生故障,故其控制架構較為簡 單。而圖 1.1(d)和圖 1.1(c)相比,圖 1.1(c)的優點是使用了較少數量的開關,但須 注意的是,其電容大小必須夠大來使電容電壓平衡。n a b c a T Tb Tc a T Tb Tc dc V 2 dc V 2 dc V S n a b c a T Tb Tc a T Tb Tc dc V S T T A B C A B C n a b c a T Tb Tc a T Tb Tc dc V A B C (a) (b) (c) (d) n a b c a T Tb Tc a T Tb Tc dc V 2 dc V 2 dc V S A B C 圖 1.1 正常狀況與線圈開路故障因應措施之電路架構
1.3 研究目的
在本論文中主要的目的是研究 SPWM 架構下的三相永磁同步馬達定子線圈 以 Y 接接法連接時,將其中一相線圈開路導致開路故障,並進行偵測故障以及故 障時之轉速控制。在馬達發生開路故障時,利用兩種故障偵測技術,探討如何在 最短時間內偵測出故障線圈,比較兩種故障偵測技術之間的差異,觀察並改善錯 誤判斷的原因,並切換控制架構使馬達中性點連結至電容中點,進行故障過渡控 制,使馬達故障時產生的高轉矩以及轉速漣波獲得改善。1.4 本文架構
本論文的內容一共分為五個章節,各章節之大綱內容概述如下: 第一章 :說明本論文的研究背景以及相關文獻回顧。 第二章 :介紹三相直流無刷馬達驅動電路、馬達數學模型和故障情況下的馬達 數學模型。 第三章 :介紹本論文所使用之開路故障偵測技術並進行模擬。 第四章 :本論文之實作結果。 第五章 :總結本論文之研究結論,如何進一步改善之建議和未來研究方向。 參考文獻 附錄第二章
三相永磁同步馬達模型與控制策略
2.1 三相永磁同步馬達模型
直流無刷馬達內部的轉子為永磁物質,欲使轉子轉動必須要從外界的磁場 變化著手,利用定子繞組線圈,以輸入電流造成電磁場的改變。直流無刷馬達工 作原理可經由觀察弦波類型直流無刷馬達之操作來了解,一個二極三相直流無刷 馬達如圖 2.1(a)所示,主要分成轉子與定子兩部分:轉子部分由一組 N、S 磁極 組成,馬達定子的部分由三組線圈構成。由於在本論文中需要使用馬達線圈兩端 點的接線,中性點部份的線圈也會使用到,馬達中性點部份的線圈沒有內藏。由 於這個原因,三相馬達一共有六個端子拉出來,線圈的部份將屬於中性點的端子 以”-“號標示,而另一端接至反流器的端子以”+”號標示。流經線圈的電流方向以 打點以及打叉標示,利用打點定義為線圈上電流流出的方向,而打叉則定義為電 流流入的方向。 三相馬達上的定子線圈共有三組,相鄰的兩組在空間中呈120分佈,欲操 作馬達轉子轉動需要改變定子線圈上的電流方向。假設定子線圈上的電流波形如 理想弦波,而馬達轉子位置 定義如圖 2.1(a)所示,理想操作下在若要輸出最大r 扭矩則三相線圈的電流波形與轉子位置的對應關係如同圖 2.1(b)所示。在此狀況 下電流波形為理想弦波,三組電流波形間最小的相位差為120,峰值以及頻率皆 相同,定義其波形為i 、as i 以及bs i 。 cs 圖 2.1(b)的輸入電流取其中兩組交會點,分別是馬達轉子在 為r 60以及 180 時對應的電流,在轉子位置為60時電流在馬達的方向以及對應的線圈關係 如下所示:此時i 以及a i 的值為正,此兩組線圈標示為”+”的部份電流由反流器c 流至馬達,而i 的值為負,此組線圈標示為”+”的部份電流方向由馬達流至反流b 器。根據電流方向定義打點以及打叉標示如圖 2.1(c)所示,從圖中可以看出三組同樣的當轉子位置改變至180度時,i 以及b i 為正,c i 為負,此時架構出的a 圖如同 2.1(d)所示。 (a) (b) (d) (c) S N cs bs bs as as cs 0 r S N cs bs bs as as cs 0 r 06 r as cs bs bs as cs 0 r 120 r 180 r as i ibs r 06 r 180 r cs i 圖 2.1 三相馬達工作原理 藉由觀察定子磁場與轉子磁場之間電磁力作用的觀念可知:如要使馬達的 輸出轉矩最大則必須使馬達轉子產生之磁通量和輸入電流產生之電磁場保持垂 直的位置,但直流無刷馬達之轉子(磁極)位置是會隨著時間週期變化,位置資訊 必須要一直更新。為了保持轉子之順序轉動及獲得最大轉矩,一般的作法是偵測 永久磁鐵轉子之磁極位置,然後由驅動電路提供相對應之輸入電流給線圈,使其 磁動勢和轉子磁極隨時保持垂直狀態,藉由此控制方法使得馬達不停運轉。
2.2 三相平衡相序
在馬達運作下,馬達上的線圈會產生相應的感應電動勢,其波形與馬達轉子 有關。理想狀況下馬達以穩定速度運轉,三相馬達上各項感應電動勢波形依照與 轉子的角度差異,呈現相差120的理想弦波分布。在三相馬達中定義角度差為 0 2 1 的兩組線圈為相鄰線圈,觀測馬達感應電動勢波形,依照相鄰角度差定義出 a、b 以及 c,其波形觀測如圖 2.2 所示。而感應電動勢的峰值與當前的轉速有關, 再轉子轉速穩定的情況下,各相波形的峰值皆為固定且彼此相等。在馬達轉速為 r 而轉子位置在 時,三相感應電動勢的波形如同式(2.1)所示: r ) 240 cos( e ) 120 cos( e cos e r r r r r r v c v b v a k k k (2.1) r
a e b e ec 2 4 圖 2.2 馬達感應電動勢波形感應電動勢波型其相序與馬達的轉向有關,假設馬達目前轉子轉向轉至另一 個方向,則此時的感應電動勢波形對照轉子的圖可以圖 2.3 表示。在實際狀況下 馬達轉子順時針運作時波形如圖 2.2 所示,而逆時針運作方向波形如圖 2.3 所示。 r
a e b e c e 2 4 圖 2.3 改變轉向之馬達感應電動勢波形 由圖 2.2 作為延伸,三相馬達在順時針方向轉動,三組線圈上的相序呈現弦 波分佈,個別的角度為 ,r r120,r 240,如式(2.2)左側的序列。同樣的, 觀察圖 2.3 三相線圈相序對應的角度分別為 ,r r 240,r 120,如式(2.2) 右側的序列。由此可知,此兩序列的感應電動勢一致,僅有轉向不同。 ) 240 cos( e ) 120 cos( e cos e r r r r r r v c v b v a k k k )) 120 ( cos( )) 240 ( cos( ) cos( r r v r r v r r v k k k (2.2)2.3 三相永磁同步馬達模型
2.3.1 三相二極永磁同步馬達參數及方程式推導
cs bs bs as as cs axis as axis ds axis qs r
S N e r as i bs i cs i s N s r s N s N bsv
asv
csv
s r s r 圖 2.4 三相二極永磁同步馬達圖 2.4 的三相二極的永磁同步馬達模型。其中定子為星型接法而轉子為永久 磁鐵,另外,每相等效電阻為r 、定子繞組匝數為s N ,而電感和電壓方程式如s 下一一介紹: 三相永磁同步馬達電壓方程式如(2.3)式所示: dt d i r v dt d i r v dt d i r v cs cs s cs bs bs s bs as as s as (2.3) 三相永磁式同步馬達電壓方程式用矩陣形式(2.4)表示: abcs abcs s abcs dt d ri λ v (2.4) 磁交鏈式又可以寫成 m abcs s abcs L i λ λ (2.5) 把磁交鏈式(2.5)代入電壓方程式(2.4)後: ) ( ) ( m s abcs abcs s abcs dt d dt d ri λ L i v (2.6) 其中d(λm) dt為三相永磁同步馬達的感應電動勢。 另外,為了求得三相永磁同步馬達完整的磁交鏈式λabcs,我們從定子中的自 感和互感產生開始,而 a 相的自感和互感可以分別表示為(2.7)- (2.9)式: ) 2 cos 2 ( 2 2 1 0 2 e s ls asas rl N L L (2.7) )) 3 2 2 cos( 2 3 2 cos ( 2 2 1 0 2 s e asbs rl N L (2.8) )) 3 4 2 cos( 2 3 4 cos ( 2 2 1 0 2 s e ascs rl N L (2.9)
其中: 1 、 :馬達氣隙長度常數(當2 (12)1時為最長, 1 2 1 ) ( 為最短) l:矽鋼片疊積厚度 r:馬達氣隙位置半徑 0 :導磁係數 ls L :漏磁電感 我們再把一些值做替換: 1 0 2 2 rl N LA s (2.10) 2 2 2 0 2 rl N LB s (2.11) 則各相的自感可表示為(2.12)-(2.14)式: e B A ls asas L L L L cos2 (2.12) ) 3 2 2 cos( ls A B e bsbs L L L L (2.13) ) 3 2 2 cos( cscs Lls LALB e L (2.14) 而各相的互感可表示為(2.15)-(2.17)式: ) 3 2 2 cos( 2 1 bsas A B e asbs L L L L (2.15) ) 3 2 2 cos( 2 1 csas A B e ascs L L L L (2.16) ) 2 cos( 2 1 c cs sbs A B e bs L L L L (2.17)
五相永磁式同步馬達各相磁交鏈方程式如下(2.18)-(2.20)式所示: mas cs ascs bs asbs as asas as L i L i L i (2.18) mbs cs bscs bs bsbs as bsas bs L i L i L i (2.19) mcs cs s bs csbs as csas cs L i L i L i csc (2.20) 用矩陣形式表示如(2.5),其中: B A ls s L I L L L 3 1 2 1 2 1 2 1 1 2 1 2 1 2 1 1 A A L L ) 3 2 2 cos( ) 2 cos( ) 3 2 2 cos( ) 2 cos( ) 3 2 2 cos( ) 3 2 2 cos( ) 3 2 2 cos( ) 3 2 2 cos( 2 cos e e e e e e e e e B B L L ) 3 4 sin( ) 3 2 sin( ) sin( e e e m mcs mbs mas m λ 1 0 0 0 1 0 0 0 1 3 I
t e e e d 0 ) 0 ( ) ( 二極永磁同步馬達於耦合場存在的能量可以表示為 m T abcs abcs ls s T abcs f L W (i ) (L I )i (i ) λ 2 1 3 (2.21) 假設為線性磁場,共能W 與c Wf 相等,而轉矩可以表示為共能W 對馬達機械角c r 的微分 ( ) ( ) [( ) ] 2 1 2 3 m T abcs r abcs ls s T abcs r r c em d d L d d P d dW T i L I i i λ (2.22) 展開後可以得到三相永磁同步馬達的轉矩方程式為(2.23):
s s as e e e e e e e e e T s s as B e e e s s as m em i i i i i i L P i i i P T c b c b c b ) 3 2 2 ( sin ) 2 ( sin ) 3 2 2 ( sin ) 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin 2 sin 2 ) 3 4 ( cos ) 3 2 ( cos ) ( cos 2 (2.23)2.3.2 在同步旋轉軸參考座標 q-ds 軸下的三相二極永磁同步
馬達
同步旋轉軸參考座標下將三軸轉換成二軸的數學表示式(2.24)為: abcs s s qdK
f
F
0
(2.24) 式中
T ds qs s qd0 F F F0 F
T cs bs as abcs f f f f 轉換矩陣K 為 s 2 1 2 1 2 1 ) 3 2 sin( ) 3 2 sin( ) sin( ) 3 2 cos( ) 3 2 cos( ) cos( 3 2 e e e e e e s K (2. 25) 反轉換矩陣Ks1為: 1 ) 3 2 sin( ) 3 2 cos( 1 ) 3 2 sin( ) 3 2 cos( 1 ) sin( ) cos( 1 e e e e e e s K (2.26) 三相永磁式同步馬達電壓方程式(2.6)經同步框轉換後可以得到: s qd s dq e s qd s s qd s s qd s s s qd s s s s qd s qd s s qd s s s qd s dt d r dt d dt d r dt d r 0 0 0 0 1 0 1 0 1 0 0 1 0 1 0 1 ] ) ( ) ( )[ ( ) )( ( ] ) [( ) ( ) ( Λ Λ I Λ K Λ K K I K K V Λ K I K V K (2.27)其中 0 0 0 0 0 1 0 1 0 1 e s s dt d K K
s 0
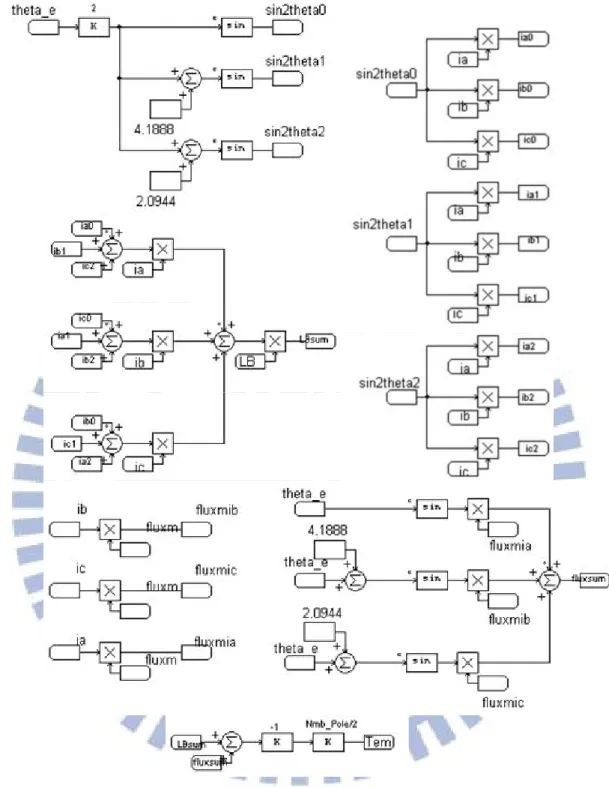
0s d qs dq Λ 而轉換後的磁交鏈方程式為: 0 1 0 0 0 0 0 0 0 0 0 1 0 0 1 0 1 m ds qs ls ds qs m s s qd s s s s qd m s qd s s s qd s m abcs s abcs I I I L L L Λ K I K L K Λ Λ I K L Λ K λ i L λ (2.28) 其中 ) ( 2 3 B A ls qs L L L L ) ( 2 3 B A ls ds L L L L 一般來說,漏感L 值都不會太大。另外,經過同步框轉換後,可以把會隨著角ls 度而改變的互感相轉換為是定值的Lqs和L 項。 ds 同步旋轉軸下的電壓方程式展開: dt d I r Vqs s qs eds qs dt d I r V ds qs e ds s ds dt d I r V0 s 0 0同步旋轉軸下的磁交鏈方程式展開: qs qs qs L I m ds ds ds L I 0 0 LlsI 最後同步旋轉參考座標軸下的電壓方程式整理得到(2.29): 0 0 0 0 0 0 0 0 m e ds qs ls s ds s qs e ds e qs s ds qs I I I dt d L r dt d L r L L dt d L r V V V (2.29) 轉矩方程式(2.23)經由同步旋轉框轉換後得到:
m r s qd s ls s r T s qd s em m T abcs r abcs ls s T abcs r em d d L d d T d d L d d T λ I K I L I K λ i i I L i 0 1 3 0 1 3 2 1 ] ) [( ) ( ) ( 2 1 (2.30) 整理後可以得到
ds qs ds qs m qs
em L L I I I P T ( ) 2 3 2 (2.31) 若此時LB 0(即Lds Lqs),則馬達轉矩大小只會受到Iqs所影響。2.3.3 三相 P 極永磁同步馬達參數及方程式
假設每相等效電阻為r 、定子繞組匝數為s N ,馬達極數為 P,大致上三相s 多極馬達的各個方程式都和三相二極馬達時類似,其電感和電壓方程式如下一一 介紹: 三相 P 極永磁式同步馬達電壓方程式用矩陣形式如同三相二極時的馬達方程式 (2.6),其中不同的是在L 和A L 項如下: B 1 0 2 2P rl N L s A (2.32) 2 2 2 0 2 rl P N LB s (2.33) 此時的三相 P 極永磁同步馬達於耦合場存在的能量也能表示成(2.21)式,假設為 線性磁場,共能W 與c Wf 相等,而轉矩又為共能對馬達機械角的微分,而另外, 在多極馬達裡,馬達電氣角與機械角的關係如下: r e P 2 t r r r d 0 ) 0 ( ) ( r e P 2 用此關係代入(2.22)展開後可以得到三相 P 極永磁同步馬達的轉矩方程式如下:
s s as e e e e e e e e e T s s as B e e e s s as m em i i i i i i L P i i i P T c b c b c b ) 3 2 2 ( sin ) 2 ( sin ) 3 2 2 ( sin ) 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin ) 3 2 2 ( sin 2 sin 2 ) 3 2 ( cos ) 3 2 ( cos ) ( cos 2 (2.34)接下來,觀察在同步旋轉 q-ds 參考座標中下的三相 P 極永磁同步馬達參數 與方程式。從上述可知三相 P 極的電壓方程式與三相二極馬達方程式相同,唯一 的差別只有在(2.32)-(2.33),所以經同步框轉換後的三相 P 極永磁式同步馬達電 壓方程式一樣如同於三相二極永磁式同步馬達的(2.29)式。 接著,三相 P 極永磁同步馬達轉矩方程式(2.34)經由同步旋轉框轉換後可得 到:
m r s qd s ls s r T s qd s em m T abcs r abcs ls s T abcs r em d d L d d P T d d L d d P T λ I K I L I K λ i i I L i 0 1 3 0 1 3 2 1 2 ] ) [( ) ( ) ( 2 1 2 (2.35) 整理後得到
ds qs ds qs m qs
em L L I I I P T ( ) 2 3 2 (2.36) 由(2.36)式我們可以發現在同樣的電流大小下,馬達極數愈高轉矩也相對的愈大。 另外馬達的機械方程式為 Load r em r T B T dt d J (2.37) 其中 J :馬達轉動慣量 B:黏滯係數 r:馬達氣隙位置半徑 Load T :負載轉矩 將(2.37)式做轉換,得到: ) (J s B T Tem Load r (2.38)此時馬達轉速與轉矩的關係可以用圖 2.5 來表示: em T + Load T r B Js 1 圖 2.5 馬達轉速與轉矩方塊圖 而在同步旋轉 q-ds 參考座標中下的三相 P 極永磁同步馬達完整的方塊圖如 下: qs V ds V sL ds rs 1 s qss r L 1 ds I qs eL ds eL qs I m qs ds L L m 4 3P B Js 1 em T r 2 P e terms coupling load T 圖 2.6 三相 P 極永磁同步馬達馬達方塊圖
2.3.4 馬達電流與馬達轉矩的關係
在LB 0(即Lds Lqs)前提下,理想中控制永磁同步馬達所輸入的電流波形 會與感應電動勢的波形同相序,此時輸入電流iabcs為: ) 3 2 cos( ) 3 2 cos( ) cos( e e e abcs I i 經過同步框轉換後 0 0 I qds I 此時穩態時馬達轉矩為:
I
P
I
P Tem m qs m 2 3 2 2 3 2 (2.39) 參考圖 2.5 馬達轉速與轉矩的關係,可以得到速度控制迴路等效方塊圖 2.7 如下: Controller Speed * r r * em T P 3 4 I* m em T 4 3P Load T B Js 1 1 I 圖 2.7 三相馬達轉速控制方塊圖2.4 馬達線圈開路故障方程式推導
2.4.1 馬達線圈開路故障方程式推導
本節將探討當線圈開路故障發生時,連接馬達中性點至電源側之電容中 點,此時其餘兩相電流所產生的變化。在單相線圈開路故障前,假設三相線圈電 流平衡,如式(2.40)所示。 ) 3 2 cos( ) 3 2 cos( cos e cs e bs e as I i I i I i (2.40) as and q axisaxis
bs
axis cs axis d Current VectorI
圖 2.8 開路故障前之電流空間向量 並且由電樞電流所產生的轉動磁動勢會相等於三相線圈所產生的磁動勢之 加總。根據圖 2.8 所示的三相座標軸,將磁動勢表示為複數向量: cs bs as c b a MMF MMF NI aNI a NI MMF MMF 2 (2.41) 其中 1 120 a N :每相定子有效線圈匝數並且在三項平衡的狀況下,磁動勢又可表示為: ) sin (cos 2 3 2 3 e e j j NI NIe MMF (2.42) 假設位於某一時間點,b 相線圈電流忽然降為零。在此情況下,轉動磁動勢 將只會等於 a、c 兩相磁動勢之和。如: ) 2 3 2 1 ( ' ' ' 2 ' ' j NI NI NI a NI MMF as cs as cs (2.43) 由於在 b 相線圈開路故障後,磁動勢將會維持不變,故將(2.42)和(2.43)兩式 聯立求解後可得: ' ' ' 2 3 sin 2 3 2 1 cos 2 3 cs e cs as e NI NI NI NI NI 由上式可求出: ) sin 3 1 (cos 2 3 sin 3 ' ' e e as e cs I I I I 或者,可將之等效為: ) 6 ( cos 3 ' e as I I (2.44) ) 2 ( cos 3 ' e cs I I (2.45) 將(2.40)與(2.44)、(2.45)兩式比較,可以看出 Ias角度增加了 30 度,反之 Ibs 角度減少了 30 度。並且兩者的電流峰值比原本增加了 3 倍。圖 2.9 為 b 相線圈 故障發生前與發生後的電流相位關係。
as I bs I cs I ' as I ' cs I 30 30 圖 2.9 b 相線圈故障發生前與發生後之電流相位關係 相同的,我們也可以用同樣的方法來針對 a 相線圈或 c 相線圈故障來進行分 析。若 a 相線圈開路,則剩下的兩相電流為: ) 6 5 ( cos 3 ' e bs I I (2.46) ) 6 5 ( cos 3 ' e cs I I (2.47) 若 c 相線圈開路,則剩下的兩相電流分別為: ) 6 ( cos 3 ' e as I I (2.48) ) 2 ( cos 3 ' e bs I I (2.49) 圖 2.10 為 a 相及 c 相線圈開路發生前與發生後的電流關係圖。可以看出電 流峰值大小皆增加了 3 倍,並且剩下兩相電流角度間隔縮小為 60 度。
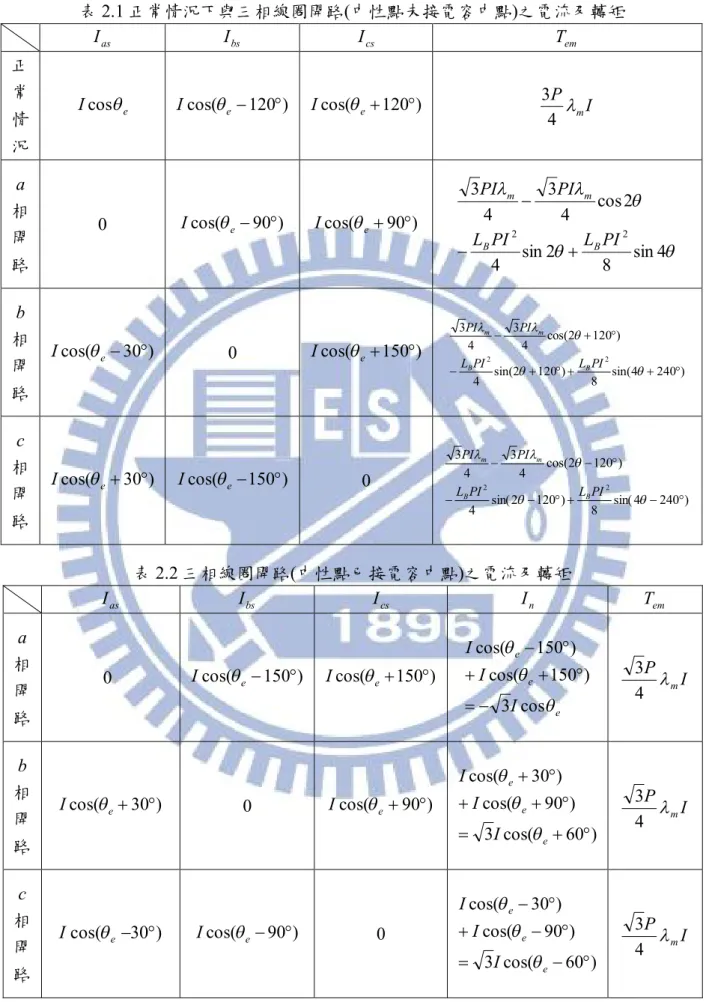
as I bs I cs I ' bs I ' cs I 30 30 as I bs I cs I ' as I ' bs I 30 30 (a) (b) 圖 2.10 (a)a 相及(b)c 相線圈開路發生前後之電流相位關係 在馬達中性點未接電容中點時,轉矩以及電流變化將在表 2.1 中加以探討, 可以看出其餘兩相電流互為反相,並且轉矩含有二次以及四次諧波成分,故在運 轉時其轉矩將會產生漣波。而表 2.2 中為馬達中性點連接電容中點時之電流和轉 矩,可以看出其轉矩比正常情況下少了 3 倍,且其諧波成分已被消除,故可得 知馬達接至電容中性點可以有效抑制線圈開路故障所造成的轉矩漣波。
表 2.1 正常情況下與三相線圈開路(中性點未接電容中點)之電流及轉矩 as I I bs I cs T em 正 常 情 況 e
Icos Icos(e120) Icos(e120) PmI 4 3 a 相 開 路 0 Icos(e90) Icos(e90) 4 sin 8 2 sin 4 2 cos 4 3 4 3 2 2 PI L PI L PI PI B B m m b 相 開 路 ) 30 cos( e I 0 Icos(e150) ) 240 4 sin( 8 ) 120 2 sin( 4 ) 120 2 cos( 4 3 4 3 2 2 PI L PI L PI PI B B m m c 相 開 路 ) 30 cos( e I Icos(e150) 0 ) 240 4 sin( 8 ) 120 2 sin( 4 ) 120 2 cos( 4 3 4 3 2 2 PI L PI L PI PI B B m m 表 2.2 三相線圈開路(中性點已接電容中點)之電流及轉矩 as I I bs I cs I n T em a 相 開 路 0 Icos(e 150) Icos(e150) e e e I I I cos 3 ) 150 cos( ) 150 cos( I P m 4 3 b 相 開 路 ) 0 3 cos( e I 0 Icos(e90) ) 60 cos( 3 ) 90 cos( ) 30 cos( e e e I I I I P m 4 3 c 相 開 路 ) 0 3 cos( e I Icos(e90) 0 ) 60 cos( 3 ) 90 cos( ) 30 cos( e e e I I I I P m 4 3
2.5 線圈開路故障控制架構
在正常情況下,利用 Encoder 訊號計算出目前轉速,再與轉速命令相減,將 差值丟入 PI 控制器中得到 q i ,並且將 d i 則固定為零。之後回授之三相電流i 、a ib 以及i ,計算出目前之c id、iq,將id、iq分別與 d i 、 q i 相減,得到的差值丟入 PI 控制器中可得到所需之 d cont v , 、 q cont v , ,再將 d cont v , 、 q cont v , 帶入 d-q 轉換矩陣中可 得 a cont v , 、 b cont v , 以及 c cont v , ,再經由 SPWM 控制得到六組開關訊號。 當故障發 生時,馬達中性點 n 將經由繼電器連接至電源側之電容中點上,屆時由故障所造 成之轉矩漣波將被消除。 * r PI r * q i 0 * d i PI PI * ,q cont v * ,d cont v d q * ,a cont v * ,b cont v * ,c cont v d q e q i d i ia b i c i 圖 2.11 三相永磁同步馬達開路故障控制架構 開關電路與開關命令 實際控制中,三相馬達運作需要接上同相數的三相反流器驅動控制,整個架 構如同圖 2.12。 as i bs i cs i a T a T b T b T c T c T dc V s r s N s r s N s r s N 圖 2.12 開關電路示意圖三相反流器主要由六組開關及電容組成,開關兩兩一組形成一臂與馬達端子 連接由直流鏈端提供電壓源,而電容主要是放在入電側來穩壓用。 三相永磁同步馬達過渡控制架構中的 SPWM 示意圖為圖 2.13,當電流命令 * a i ~ic*經過電流控制器後得到三相電壓命令 * ,a cont v ~ * ,c cont v ,再以 SPWM 的開關切 換方式送到圖 2.13 裡的各相開關。 a T a T b T b T c T c T tri vˆ * a i * b i * c i cs i bs i as i a cont v , controllercurrent controllercurrent controllercurrent b cont v , c cont v , 圖 2.13 開關命令方塊圖
弦波脈衝寬度調變(Sinusoidal pulse width modulation, SPWM),是產生一個弦 波訊號與一組固定頻率的三角波做比較來改變開關的工作週期(Duty),當弦波訊 號大於三角波訊號時,上臂的開關就會導通;反之,當弦波訊號小於三角波訊號 時,上臂的開關就不為導通。因此,當弦波值最大時開關的工作週期會最大,而 弦波值最小時開關的工作週期為最小。
同一相的下臂開關方式,則剛好和上臂反相,通常做法是直接把上臂的開關 訊號後面接個反相的邏輯電路而得到下臂的開關訊號。不過這邊要注意的是,在 實際電路中若有某一相的上下臂同時導通時,可視為把直流鏈端電壓(DC Bus) 經由此相的開關短路,瞬間產生的大電流會導致此相的開關燒掉,所以通常為了 避免發生這種同時導通的情況,會在開關加上空白時間(Dead time),而空白時間 之作法乃將每一開關由開路至導通的瞬間延後延遲一小段時間,圖 2.14 裡的t 即為空白時間。其中空白時間的加入會使得馬達輸入電壓減小,所以不宜挑選過 大的空白時間。 a T a T t t t t 圖 2.14 空白時間示意圖
第三章
三相永磁同步馬達開路故障偵測
3.1 開路故障偵測
故障偵測以及辨識的目的是為了當線圈開路故障發生時,系統能迅速偵測故 障,並採取有效動作,讓故障造成的影響減輕至最低。由前一章的表 2.1 可以得 知,當馬達中性點連接電容中點時,故障所造成的轉矩漣波會被消除,形成固定 之轉矩,達到故障控制的目的。 圖 3.1 為故障偵測之架構圖,當三相電流中有某相線圈開路故障時,故障偵 測器將行成對應的三組故障訊號 FTa、FTb、FTc,而此三組故障訊號又將合成為 FT 故障訊號,用來控制馬達中性點 n 至電源側電容中點 o 間的開關 S,使得故 障造成的轉矩震盪得以排除。 在表 3.1 中為總故障訊號與各相故障訊號之關係,當正常情況時,故障訊號 皆為 0。如果當 a 相線圈發生故障時,對應之 FTa將由 0 變成 1,而此時總故障 訊號也隨著 FTa變成 1。而 b 相、c 相故障訊號之關係同理可得。 Fault Detector FTa FTb FTc bs i cs i as i FT n a b c a T Tb Tc a T Tb Tc dc V 2 dc V 2 dc V S as i ibs cs i o ORFTa FTb FTc FT 正常情況 0 0 0 0 A 相故障 1 0 0 1 B 相故障 0 1 0 1 c 相故障 0 0 1 1 表 3.1 故障訊號與各相開路故障之關係
3.1.1 平均電流偵測法
由於當線圈開路故障發生時,發生故障之線圈電流便固定為零,平均電流偵 測法即是偵測各相之電流大小,判斷是否發生開路故障。平均電流偵測法為先將 各相電流取絕對值,再將所得絕對值之結果取平均,此時將假設一極小值作為故 障取樣點I ,當電流平均值小於故障取樣點th I 時,則判斷為故障發生,其架構th 如圖 3.2 所示。 as i bs i cs i 1 z 1 z 1 z z1 z1 1 z z1 z1 1 z ] [n ias th I as I bs I cs I ] [n ibs ] [n ics S/H S/H S/H 圖 3.2 電流平均偵測法 其中 N N n i n i n i Ias as[ ] as[ 1] as[ 1] (3.1) th as th as a I I when I I when FT 1 0此偵測法的故障偵測時間長短取決於本身偵測取樣週期T ,取樣週期s T 越s 長則偵測時間越久,而取樣週期T 也會影響此偵測法的準確性。如圖 3.3 所示,s 電流平均值將隨著取樣週期T 的縮短而變小,而正常情況下電流平均值必須大於s th I 否則此偵測法將會判斷為故障發生,故在取樣週期T 較小時,若電流平均值s 過小則將會較容易導致錯誤的故障偵測結果。 2 4 th I 最小平均值 I I 2 2 4 I 716 1 . 1 I 609 . 0 s T 圖 3.3 取樣週期與電流平均值之關係
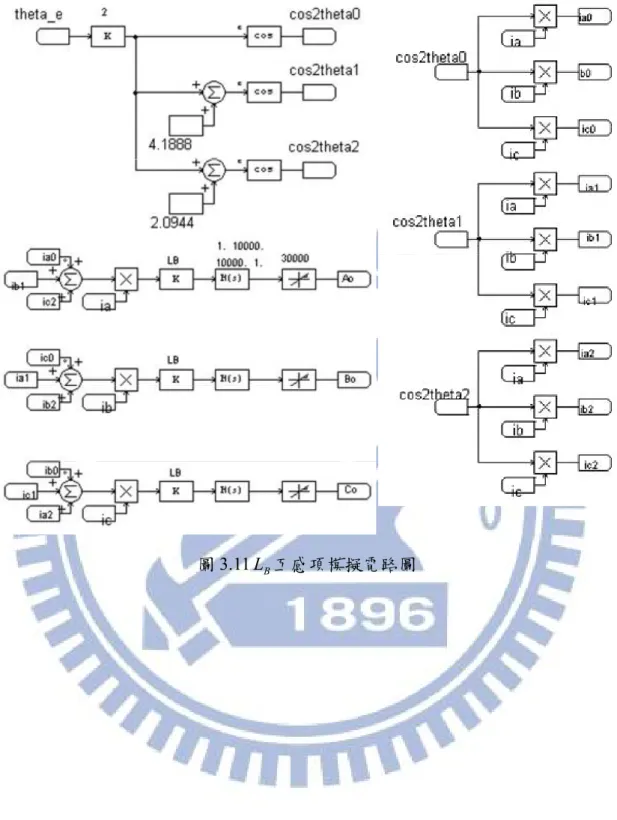
取樣個數N 固定(不隨轉速變動) 馬達的週期可以寫成 P P f T r r 120 ) 2 60 ( 1 1 (3.2) 當N 為定值且取樣計算週期 2 rated s T NT 時 s rated r rated r s rated s PT N P NT T NT , , 60 2 ) 120 ( 2 (3.3) 可以計算出此時的角度位於 rated r r r s s rated r r s r s P T PT P NT P NT , , 2 ) 120 ( ) 60 ( ) 120 ( 2 ) 120 ( (3.4) 將此角度代入Isin 取平均可得電流平均值為 th rated r r r rated r r rated r I I d I rated r r
)] 2 cos( 1 [ 2 sin 2 , , 2 0 , , (3.5) 故當下式發生時,系統將偵測出發生故障 th rated r r rated r r I I 1 , , )] 2 cos( 1 [ 2 (3.6) 由上式可得圖 3.4 之故障偵測範圍。可以看出當取樣計算區間變短時,能夠 正確偵測故障的區域也隨之縮小。其中Ith(p.u.)、Tem(p.u.)、r(p.u.)分別代表了I 、th em T 、 的標么值。其中r Ith(p.u.)在此設定為額定電流峰值的 5%。 peak rated u p I I I , .) . ( (3.7) % 5 , .) . ( peak rated th u p th I I I (3.8)base em em u p em T T T , .) . ( (3.9) rated r r u p r , .) . ( (3.10) (a) 0 0.5 1 0 0.5 1 .) . (pu r 0 0.5 1 0 0.5 1 .) . (pu r 0 0.5 1 0 0.5 1 .) . (pu r 0 0.5 1 0 0.5 1 .) . (pu r (b) (c) (d) 正常的故障偵測區域 錯誤的故障偵測區域 正常的故障偵測區域 錯誤的故障偵測區域 正常的故障偵測區域 錯誤的故障偵測區域 正常的故障偵測區域 錯誤的故障偵測區域 .) . (pu I I(p.u.) .) . (pu I .) . (pu I 圖 3.4N固定之平均電流偵測法 (a) 60 , 0.05 2 , ( ..) th pu s rated r s rated I PT T T N (b) 30 , 0.05 2 , ( ..) th pu s rated r s rated I PT T T N (c) 15 , 0.05 2 , ( ..) th pu s rated r s rated I PT T T N (d) 7.5 , 0.05 2 , ( . .) th pu s rated r s rated I PT T T N
取樣個數N 可變(隨轉速變動) 由於馬達電氣波形之週期會隨轉速有所變化,為了使取樣計算週期 T NTs 固定 為 ,則N必須依據轉速而改變。 2 T NTs s r s PT T T N 0 6 2 (3.11) 當下式之情況發生時,系統將偵測出發生故障 th th I I I I 2 2 (3.12) 當N 為變數時,根據不同的取樣週期可以統整出表 3.2 並且可以繪出故障偵 測操作範圍如圖 3.5 所示。 由圖 3.5 可以看出當取樣週期縮小時,故障偵測的區域隨之增加,也可以看 成在取樣週期為 時,當電流小於 Ith 2 系統就判斷為故障;而在取樣週期為 2 時,電流則小於 Ith 716 1 . 1 即判斷為故障,故可知當計算區間縮小時,系統偵測 故障的正確區域也隨之縮小。 表 3.2 取樣週期與故障偵測範圍 取樣週期 N 故障偵測範圍 s rPT 0 6 ) . ( 2 Ith pu I 2 s rPT 0 3 ) . ( 716 1 . 1 Ith pu I 4 s rPT 15 ) . ( 609 . 0 Ith pu I 8 s rPT 7.5 ) . ( 307 . 0 Ith pu I
.) . (pu r .) . (pu r r(p.u.) .) . (pu r .) . (pu I .) . (pu I .) . (pu I I(p.u.) 圖 3.5N可變之平均電流偵測法 (a) 60 , 0.05 2 ( ..) th pu s r s I PT T T N (b) 30 , 0.05 2 ( ..) th pu s r s I PT T T N (c) 15 , 0.05 2 ( . .) th pu s r s I PT T T N (d) 7.5 , 0.05 2 ( . .) th pu s r s I PT T T N 當馬達負載變小時,由於線圈電流變小,當電流小於所設定之I 時,此偵th 測法的準確性便相對降低,故此偵測法雖然較為單純,但僅僅適用於較高負載與 高計算區間的情況來進行故障偵測。
3.1.2 電流餘值偵測法
電流餘值偵測法其架構如圖 3.6 所示。首先將各相電流兩兩相減,之後將其 取絕對值後加總取平均值,再將所得結果減去K倍的另外兩項,由於在正常情況 下取平均後的值皆為相等,而在 a 相線圈開路故障發生時 Iab:Ibc:Ica =1:2: 1,故將K設於介於 1~2 的值,可以得到X 為正,其餘兩相 Xa b、Xc為負,故可 得FTa 1,偵測結果為 a 相發生故障。 as i bs i cs i 1 z 1 z Xa 1 z 1 z 1 z b X 1 z z1 z1 Xc 1 z ab I bc I ca I S/H S/H S/H K K K ab I bc I ca I 圖 3.6 電流餘值偵測法 其中 ] [ ] [ ] [ ] [ ] [ ] [ n i n i I n i n i I n i n i I as cs ca cs bs bc bs as ab , 0 1 0 0 a a a X when X when FT (3.12) N N n I n I n I K N N n I n I n I X N N n I n I n I K N N n I n I n I X N N n I n I n I K N N n I n I n I X ca ca ca ab ab ab c bc bc bc ca ca ca b ab ab ab bc bc bc a ] 1 [ ] 1 [ ] [ ] 1 [ ] 1 [ ] [ ] 1 [ ] 1 [ ] [ ] 1 [ ] 1 [ ] [ ] 1 [ ] 1 [ ] [ ] 1 [ ] 1 [ ] [ (3.14)取樣個數N 固定 ab I bc I ca I ab I bc I ca I 0 0 0 0 0 0 (a) (b) (c) I 3 3I ab I bc I ca I I 3 圖 3. 7(a)I 、ab I 、bc I 電流波形(b)(c)不同轉速下之ca Iab 、Ibc 、Ica 電流波形 圖 3.7(a)為穩態時之馬達三相電流,將其兩兩相減後取絕對值可得(b)、(c) 中之波形,而其中(b)、(c)差別在於(b)之轉速大於(c),故(b)之週期較小。而當N 固定時,由於所涵蓋之角度固定,所以在計算上(b)與(c)會有些許之差異,其差 異在下面之計算中將詳細討論。 當在額定轉速r ,rated下,選擇固定取樣個數N固定為 s rated T T 2 ,計算角度為涵 蓋 角度區間 s rated r rated r s rated s PT N P NT T NT , , 60 2 ) 120 ( 2 (3.15)
當在轉速 時,其週期為r P r 120 ,所以累加個數N對應的計算角度為 2 ) 120 ( P NT r s ,為了計算方便,我們將零點放在此角度之中間得出涵蓋的角度位於 下式的區間,如圖 3.17(b)所示 0 , , 2 ) 120 ( ) 60 ( ) 120 ( rated r r r s s rated r r s P T PT P NT (3.16) 將此角度代入I 中計算此角度下所佔之面積為 bc 0 0 cos 2 sin 2
0I d I (3.17) 另外將此角度代入I ,由於當角度大於ab 6 時,其角度涵蓋兩條不同之曲線, 如圖 3.17(b)所示;而在小於 6 時,其角度僅涵蓋一條曲線,如圖 3.17(c)所示。 故計算其面積要分為角度大於 6 與小於 6 兩種情況來做計算,計算過程如下所 示。 (i) 6 0 3 1 (p.u.) , r rated r r ) cos 3 2 ( ) 3 cos( ) 3 2 cos( 0 6 -6 0 0
I d
I d I (3.18) (ii) 6 0 3 1 (p.u.) , r rated r r 0 sin ) 3 cos( 0 0 I d I
(3.19)而當下式發生時,雖然此時並無開路故障情況發生,但依舊有可能判斷錯 誤,偵測結果可能為故障狀態。 (i) 6 0 3 1 (p.u.) , r rated r r ) cos 3 2 ( sin 2 0 K 0 (3.20) (ii) 6 0 3 1 (p.u.) , r rated r r 0 0 sin sin 2 K (3.21) 由上式可得圖 3.8 之故障偵測範圍,當K 1.1,馬達操作在額定轉速時,故 障偵測結果屬於正常狀態,而當轉速低於 0.9 倍的額定轉速時,故障偵測結果便 發生錯誤偵測。並且當此偵測故障之K值越小,在轉速低的情況將無法偵測故 障,偵測準確性隨之降低,且此方法之偵測準確性與電流大小並無直接關係。