The Geographic Event-Driven Dispatch Algorithm for a Hybrid Sensor
Network
Tian-Wen Song
1, 2, Hsiu-Kuei Chiang
3, Chao-Yang Lee
3, Liang-Cheng Shiu
4, and
Chu-Sing Yang
31
Department of Computer Science and Engineering, National Sun Yat-sen University
2Department of Applied Internet Science, Hsing Kuo University
3
Department of Institute of Computer and Communication Engineering, National Cheng
Kung University
4
Department of Information Technology, National Pingtung Institute of Commerce
[email protected]
Abstract
-Sensor deployment is an important issue in wireless sensor networks. In this paper, we propose the geographic event-driven dispatch algorithm in a sensor network with a mix of mobile and static sensors. The key feature is that the deployment process is triggered by an event-driven request and tries to solve the sensor dispatch problem. The mobile sensor will be selected to heal coverage hole, according to the position and the approximate contribution estimation of each mobile sensor. The efficiency estimation of each mobile sensor is related to the geographic information and distance between two sensors. Experiments demonstrate the superiority of our algorithm for average energy consumption and network lifetime by using geographic event-driven sensor dispatch algorithm in a hybrid sensor network.Keywords: Geographic, Coverage, Mobile Sensor,
Sensor Deployment, Wireless Sensor Networks.
1. Introduction
A sensor network is composed of a large number of sensor nodes that are densely deployed. Unlike traditional mobile ad-hoc networks [1], wireless sensor networks [2] consist of the sensor nodes which are made up of four basic components: a sensing unit, a processing unit, a transceiver unit and a power unit [3]. These nodes can self-organize and adapt to support the specific applications such as environment monitoring, pollution detection, and target tracking. Therefore, more and more researchers pay their attention to the sensor networks, and one of the most important issues focused in previous works is sensor deployment. By employing different deployment strategies sensor deployment may be optimized for commutation/computation cost, coverage rate, and power efficiency.
Since the problems of sensor coverage and deployment are fundamentally inter-related [4] in a sensor network, many deployment algorithms were proposed for increasing the coverage of the sensor field. Some of these related works assume all of the sensors are static [5, 6]. Since randomly deploying sensors usually obtains an undesired coverage ratio, the static sensor networks must be deployed according to a predefined shape decided by the different optimal algorithms. More recent works on sensor deployment assume all sensors are mobile [7, 8, 9]. The key advantage of employing mobile sensors is that sensors can dynamically move to monitor uncovered areas for increasing coverage ratio. The sensors may move from a densely deployed area toward a sparse area from a k-covered area to a coverage hole.
Recently, only few studies [10, 11] have so far been made at deploying a mixture of mobile and static sensors to construct sensor network for balancing sensor cost and coverage. A bidding protocol was proposed in [10]. Static sensors estimate coverage holes which are areas not covered by any node, and bid mobile sensors to heal the holes. Mobile sensors choose highest bid and move to the corresponding target location for covering holes. These processes may go into iterations until stable status is achieved. No more sensors will move and desired sensing coverage is achieved in this stable status. In paper [11], a novel approach for relocating mobile sensors in a hybrid sensor network was presented. It utilized flip-based mobile sensors [12], and the optimal decision of the mobile sensor node moving direction is made based on Analytical Hierarchy Process (AHP) [13] according to four factors: coverage hole, obstacle avoidance, hot spot, and the boundary effect. Each factor consists of eight direction alternatives. Mobile sensors will flip to the decided direction according to calculated
global weights. The processes also iterates until the network stable state is achieved. These recent two papers deal with the coverage problem, but there may be a lot of movements during the process.
Based on this observation, we propose a geographic event-driven dispatch algorithm in a hybrid or called a mixed wireless sensor network consisting of both static and mobile sensor nodes. By choosing to move the mobile sensor with lowest cost which means the best, it will make improvements of decreasing total cost of coverage and power consumption in a different applied consideration.
The rest of this paper is organized as follows. In Section 2, we introduce some preliminaries on our assumption, system scenario, and problem definition. Section 3 presents the geographic event-driven dispatch algorithm. Experiment results are given in Section 4. Finally, concluding remarks are made in Section 5.
2. Preliminaries
2.1. Assumptions
In this paper, we discuss the related deployment problem, which is “mobile sensor dispatch problem.” The object of our algorithm is to select a set of adaptable mobile sensor to be move with more efficiency. There are some assumptions. z In a sensing field A, we distributed a lot of
static sensors, and a few mobile sensors around the sink initially.
z Each sensor has the same communication distance Rc and sensing distance Rs. Sensor
node’s communication range Rc is larger than
the sensing range Rs. Here, we assume the
communication range Rc is twice the sensing
range Rs.
z Every sensor node can receive another sensor node’s message within its communication range. The sink knows the position and distance between them.
z Every sensor node can detect if there are obstacles in its sensing range and knows these obstacles’ position. Also assume that the size and shape of obstacles are known beforehand and loaded into sink before deployment.
2.2. System Scenario
In this paper, the proposed method to rearrange mobile sensor nodes in the rescue scene uses the efficiency estimation to decide the candidate which should be moved by the sink. The goal of this method is to heal coverage hole efficiently in order to get acceptable coverage and low power
saving while keeping network connectivity. Initially the static sensors are randomly deployed in the monitoring area, and Voronoi diagram [14, 15] is employed to detect and estimate the coverage holes. The sink (a base station or control center) collect information and determine the target location of the mobile sensors. The event-driven request means the sink observes the collected data represents an abnormal phenomenon. To meet sensing coverage requirements once the sink detect event driven request, it will allocate or relocate mobile sensors which satisfy certain of criteria to move to the target location. Both holes and mobile sensors are labeled with geographic location to be the basis of the strategy of selection mobile sensors.
Sensor nodes don’t send data until a certain event occurs in event-driven wireless sensor network [16]. In our opinion, while an event occurs around a hole, the mobile sensors are dispatched to heal the hole, and this is the reason why our methods are called event-driven algorithms. Unlike some other previous works, our algorithm is event-driven sensor management which is closer to some specific real application. It decreases the average total moving distance and reduces the power consumption to achieve both deployment efficiency and extend the sensor network lifetime.
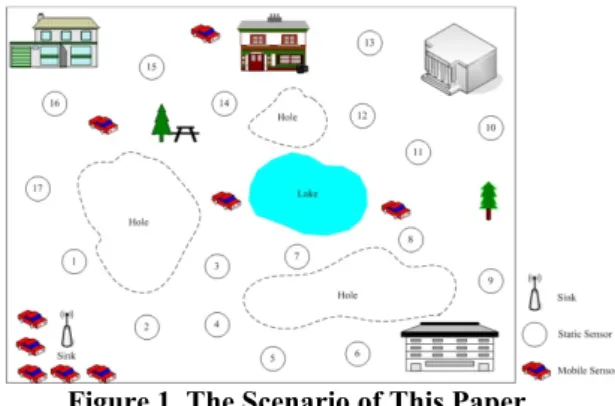
Figure 1. The Scenario of This Paper.
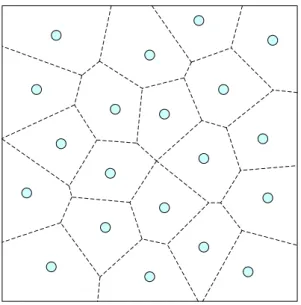
An example is shown in Fig. 1. The quadrangle indicates the interested sensing field A. There are more static sensor nodes (circular shape with an ID) and a few mobile sensors which are some in the sensing field A and some around the sink. All buildings, trees, and lake are considered as obstacles. Each sensor node knows its own geographic location by using localization algorithm [17, 18, 19], and then apprises to sink. Thus, the sink can construct a Voronoi cell after receiving the local information from all of sensors. As shown in Fig. 2, the sink can evaluate the bisector lines between sensors. After all bisector
lines have been evaluated, these lines can construct Voronoi cells. In a given cell, the sensor in the cell is closer to the every point in the cell than any other sensors. Therefore, the sink can obtain all the hole information by using the Voronoi diagram. In this paper, while a certain event occurs around a hole H or the total hole size HS is larger than threshold ε , the mobile sensors will be dispatched to heal the hole H.
Figure 2. The Voronoi Diagram.
2.3. Problem Definition
By using sensor efficiency estimation the sink can decide the mobile sensor which must to be moved, so the mobile sensor with high efficiency and lowest moving distance move to provide the require coverage. Thus, there are some characterizations must be consideration.
(a) Several Sensors Case (b) The Obstacle Case
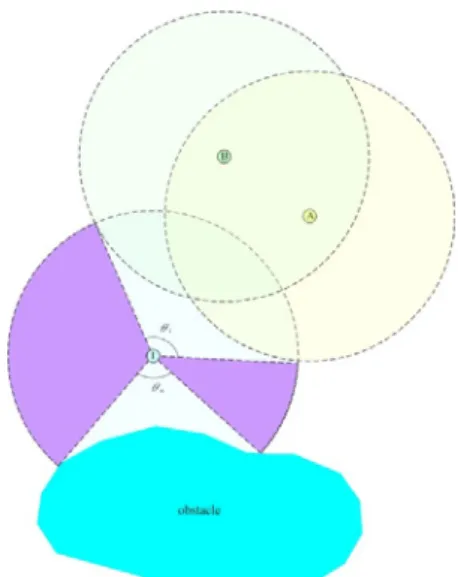
Figure 3. Two Cases of Characterizations around the Mobile Sensor.
In this paper, we define two sensors si and sj is
connected if the distance between sensors si and sj
is less than Rc and the line segment between
sensors si and sj does not intersect any obstacle or
boundary of sensing field A; otherwise, they are disconnected. If there are several sensors are inside communication distance Rc of sensors si, these
sensors may reduce the efficiency of the sensor. Otherwise, we assume that a point can be monitored by a sensor if it is within a distance of
Rs and line of sight exists with the existence of
obstacles. In other words, the obstacles may also reduce the efficiency of the sensor. Fig. 3(a) and (b) show the examples which may reduce the efficiency of sensor. Therefore, we discuss the mobile sensor dispatch problem, it means given a set of mobile sensors S already deployed in A and an area of hole H that has to be monitored. There is a problem asks how to find a subset of mobile sensors ms S to be moved to H with lower cost.
3. The Geographic Event-Driven
Dispatch Algorithm
3.1. Basic Structures
In the section, we design a sensor dispatch algorithm which is a centralized algorithm. The sink owns the information of the holes and the mobile sensors, and decides to location the mobile sensors with minimum cost. If the environment is known in advance, then a map can be stored into the memory of each sensor node and the movement of all the nodes can be well planned so that each of them can move to its target directly without any extra delay and energy consumption.
The static sensors should explore and be deployed randomly to cover the area A. If a sensor node becomes dysfunctional due to energy depletion or, there is a space that can no longer be monitored. The hole in the area is defined as a region that is uncovered by any sensors S and needs the mobile sensors to move to. Each h H owns the following fields:
• Hole Size
• Position
Hole Size denotes the size of the hole, and Position field indicate the center coordinate of the
hole. This information about the holes can be obtained through Voronoi diagram.
As for mobile sensors, there are the following fields to indicate the situation for each mobile sensor.
• Position
• Monitor Area
For each mobile sensor, the initial Position field is set to (0, 0). It means the mobile sensor is located at origin. The Monitor Area field describes the efficiency of mobile sensor.
3.2. The Efficiency Estimation of Mobile
Sensor
Given a set of mobile sensors S already deployed in A and an area of the hole H that has to be monitored. There is the problem asks how to find a subset of mobile sensors ms S to move to
H. Here, we consider a movement solution to
relocate mobile sensors in an efficient way. Initially all the mobile sensors with the same capability is located around the sink. The mobile sensor dispatch algorithm use the efficiency calculated by each mobile node to decide which mobile sensors should be moved. In this paper, if the mobile sensor is used and deployed in A, we calculate the monitor area Ms of the mobile sensors
S to estimate the individual contribution, that is,
∑ ∑
(1) where θi is the overlapping angle of the neighbours
sensor and θo is overlapping angle of the obstacles.
Besides if the mobile sensor is unused and deployed in A, the monitor area Ms of the mobile
sensor is equal to zero.
Figure 4. A Sample of Contribution Estimation of Mobile Sensor.
Fig. 4 indicates an example. We estimate the contribution of the mobile node S by using equation (1). The dotted line denotes the sensing area of sensor. It must be noted that the sensing area of sensor A and B is overlapping with each other, and they also overlapping with the sensing area of mobile sensor S. Thus, the sensing area of sensor A and B can be noted as a group. Therefore, we can obtain the overlapping angle of the neighbour sensors θi and the obstacle θo. Finally,
we can obtain the monitor area Ms of the mobile
sensor.
3.3. The Mobile Sensor Dispatch
Initially, the sink receives the hole H information from the sensors. Generally speaking, the sink obtains the data from all the sensors and confirms whether an event happened. In other words, if the collected data represents an abnormal phenomenon, thus the event happens and the sink must decide which mobile sensors will move to the target hole by the minimum monitor area. In other case, if the sensor is decentralize or some of the sensors have non-energy, it may cause the decrease in coverage area. Therefore, the sink may decide some mobile sensor move to.
Notations:
ei: a event occurs in the i-th hole hi H, where i
= 1, 2, …, n; n is the total number of holes.
HS: the total hole size.
Sensor Dispatch Algorithm: if ei = true
for each ms
find the set of mobile sensor with the minimum monitor area Mi
select one mobile sensors msi from the above
set, in which the sensor is the closest to hi
move msi to the hi
end if HS >ε
find the maximum size of hole h
find the set of mobile sensor with the minimum monitor area Mi
select one mobile sensors msi from the above
set, in which the sensor is the closest to hi
end
Figure 5. The Geographic Event-Driven Dispatch Algorithm.
Fig. 5 shows the geographic event-driven dispatch algorithm. When the event happens around the Hi, the mobile sensor which is chosen
by the sink will be moved to. If a mobile sensor
msi satisfies the following constrains, it is a
candidate which will move to hi.
• The monitor area is low.
• The distance between msi and hi is short.
4. Experiments
In this section, we present some simulation results to verify the effectiveness of the proposed algorithm. We compare our proposed with bidding protocol, in-order scheme, and random scheme. The in-order scheme and random scheme mean the
sink decide which sensor should be moved by in-order and random, respectively. Table 1 presents the environment parameters of the simulation, and the energy consumption parameters are the same as in [20].
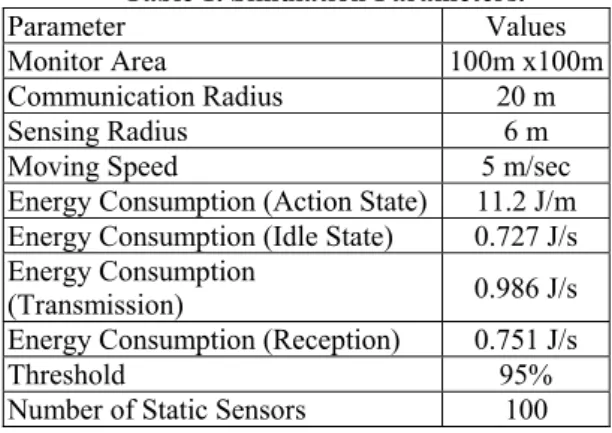
Table 1. Simulation Parameters.
Parameter Values Monitor Area 100m x100m
Communication Radius 20 m Sensing Radius 6 m Moving Speed 5 m/sec Energy Consumption (Action State) 11.2 J/m Energy Consumption (Idle State) 0.727 J/s Energy Consumption
(Transmission) 0.986 J/s Energy Consumption (Reception) 0.751 J/s
Threshold 95% Number of Static Sensors 100
In the first experiment, as shown in Fig. 5, investigates the changes of average coverage ratio with the increase of the number of mobile sensors. The average coverage ratio of our proposed which satisfies the coverage request is similar to the bidding protocol. Therefore, our proposed is feasible. 82 84 86 88 90 92 94 96 98 100 10% 20% 30% 40% 50% 60% 70% 80% 90% A ve rage C ove ra ge R at io (% )
Percentage of the Mobile Sensors
Bidding Protocol In-order Scheme Random Scheme The Proposed
Figure 5. Average Coverage Ratio.
Assume each sensor node equips with three basic energy consumption types: sensing, transmitting and receiving. We simulate the changes of the system lifetime in the second experiment. The simulation results are shown in Fig. 6. As expected, the system lifetime in our proposed algorithm is longer than that in compared bidding protocol. Fig. 7 depicts the average depleting energy between these algorithms. Our algorithm starts the deploying process by an event-driven request. Thus, the event-driven deployment can effectively reduce the unnecessary movements and the energy consumption of the mobile sensors. Moreover, our proposed decide
which mobile sensor should be move by using efficiency estimation. Thus, the sink can solve the sensor dispatch problem with low cost. Therefore, our proposed have the better performance.
0 100 200 300 400 500 600 700 800 900 10% 20% 30% 40% 50% 60% 70% 80% 90% A ve ra ge S ys te m L if eti m e (S ec )
Percentage of the Mobile Sensors
Bidding Protocol In-order Scheme Random Scheme The Proposed
Figure 6. Average System Lifetime.
0 200 400 600 800 1000 1200 1400 10% 20% 30% 40% 50% 60% 70% 80% 90% A vera ge d ep let in g en er gy (J )
Percentage of the Mobile Sensors
Bidding Protocol In-order Scheme Random Scheme The Proposed
Figure 7. Average Depleting Energy.
5. Conclusions
In this paper, we propose the geographic sensor dispatch algorithm in a hybrid sensor network consisting of static and mobile sensors. The objective is to utilize an event-driven request instead of the overall coverage approach to reduce unnecessary sensor movements. Besides, this paper tries to solve the sensor dispatch problem. The mobile sensor should be selected to heal coverage hole, according to the position and the approximate efficiency estimation of each mobile sensor. Our proposed algorithm can decide the adaptable mobile sensor to be moved with lowest cost. Simulation results showed that our proposed algorithm can achieve the purposes of solving sensor dispatch problem and improving network lifetime. Since our approach is a centralized deployment algorithm, we will improve it with distributed deployment scheme based on this work in the future. Conducting the algorithm to a real specific sensor network application is also an important future work and great contribution.
Acknowledgment
Science Council under grant
NSC-97-2218-E-006-012 and NSC-97-2218-E-006-015, Taiwan.
References
[1] I. Chlamtac, M. Conti, and J. J. Liu, “Mobile ad hoc networking: Imperatives and challenges,” Ad Hoc Networks, 1(1), 2003, 13-64.
[2] G.J. Pottie, “Wireless Sensor Networks,”
Proc. IEEE Information Theory Workshop,
Killarney, Ireland 1998, 139-140.
[3] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, “Wireless sensor networks: a survey,”
Computer Networks, 38(4), 2002, 393-422.
[4] S. K. Meguerdichian, F. Potkonjak, M. Srivastava, and M. B. Srivastava, “Coverage problems in wireless ad-hoc sensor networks,”
Proc. IEEE Conference on Computer Communications, Anchorage, Alaska, USA,
2001, 1380-1387.
[5] S. Kumar, T. H. Lai, and J. Balogh, “On k-coverage in a mostly sleeping sensor network,” Proc. 10th annual international
conference on Mobile computing and networking, Philadelphia, PA, USA, 2004,
144-158.
[6] O. Rahman, A. Razzaque, and C. S. Hong, “Probabilistic Sensor Deployment in Wireless Sensor Network: A New Approach,”
Proc. 9th International Conference on
Advanced Communication Technology,
Phoenix Park, South Korea, 2007, 1419-1422.
[7] G. Wang, G. Cao, T. L. Porta, and W. Zhang, “Sensor Relocation in Mobile Sensor Networks,” Proc. 24th IEEE Annual Joint
Conference of the IEEE Computer and Communications Societies, Miami, FL, USA,
2005, 2302-2312.
[8] G. Wang, G. Cao, and T. L. Porta,
“Movement-assisted sensor deployment,”IEEE Transactions on Mobile
Computing, 5(6), 2006, 640-652.
[9] S. Yang, M. Li, and J. Wu, “Scan-Based Movement-Assisted Sensor Deployment Methods in Wireless Sensor Networks,”
IEEE Transactions on Parallel and Distributed Systems, 18(8), 2007, 1108-1121.
[10] G. Wang, G. Cao, P. Berman, and T. L. Porta, “Bidding Protocols for Deploying Mobile Sensors,” IEEE Transactions on Mobile
Computing, 6(5), 2007, 515-528.
[11] [18] X. Wu, J. Cho, B. J. d'Auriol, S. Lee,
and H. Y. Youn, “Self-deployment of Mobile Nodes in Hybrid Sensor Networks by AHP,”
Lecture Notes in Computer Science, 4611,
2007, 663-672.
[12] G. Wang, G. Cao, T. L. Porta, and W. Zhang, “Sensor Relocation in Mobile Sensor Networks,” Proc. 24th IEEE Annual Joint
Conference of the IEEE Computer and Communications Societies, Miami, FL, USA,
2005, 2302-2312.
[13] D. Niculescu and B. Nath, “Ad Hoc Positioning Systems (APS) Using AoA,”
Proc. IEEE INFOCOM, 2003.
[14] F. Aurenhammer, “Voronoi Diagrams—A Survey of a Fundamental Geometric Data Structure,” ACM Computing Surveys, 23(3), 1991, 345-405.
[15] A. Ghosh, “Estimating Coverage Holes and Enhancing Coverage in Mixed Sensor Networks,” Proc. 29th Annual IEEE
International Conference on Local Computer Networks, Tampa, FL, USA, 2004, 68-76.
[16] I. Mahgoub and M. Ilyas, Sensor Network
Protocols (CRC press,2006)
[17] N. Patwari and A. Hero III, “Using Proximity and Quantized RSS for Sensor Location in Wireless Location in Wireless Networks,”
Proc. Workshop Wireless Sensor Networks and Applications, 2003.
[18] A. Savvides, C. Han, and M.B. Strivastava, “Dynamic Fine-Grained Localization in Ad-Hoc Networks of Sensors,” Proc. ACM
MobiCom, 2001.
[19] M. A. Batalin and G. S. Sukhatme, “Efficient Exploration Without Localization, IEEE
International Conference on Robotics and Automation (ICRA), May 2003
[20] V. Raghunathan, C. Schurgers, S. Park, and M. B. Srivastava, “Energy-Aware Wireless Microsensor Networks," IEEE Signal
![[102-2] WNFA lab4 - A Tiny Wireless Sensor Network 2014/5/12 Chih-Hsien Ou](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)