國 立 交 通 大 學
機械工程學系碩士班
碩 士 論 文
太曼-格林干涉儀量測藍寶石晶圓之薄膜應力
Measurement of Thin Film Stress in Deposited Sapphire Substrate
Using Twyman-Green Interferometer
研 究 生:湯士杰
指導教授:尹慶中 博士
太曼-格林干涉儀量測藍寶石晶圓之薄膜應力
Measurement of Thin Film Stress in Deposited Sapphire Substrate
Using Twyman-Green Interferometer
研 究 生:湯士杰 Student:Shih-Chieh Tang
指導教授:尹慶中 博士 Advisor:Dr. Ching-Chung Yin
國 立 交 通 大 學 機械工程學系碩士班
碩 士 論 文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering August 2011
Hsinchu, Taiwan, Republic of China
太曼-格林干涉儀量測藍寶石晶圓之薄膜應力
研究生:湯士杰 指導教授:尹慶中 博 士 國立交通大學機械工程學系碩士班摘要
在藍寶石基板上沉積薄膜的製程中,由於薄膜材料與藍寶石基板的 材料性質不同,造成薄膜與基板內皆更殘留應力使得基板變形,殘留應 力產生主因可分為基板與薄膜兩者晶格的不匹配與兩者的膨脹係數不同, 分別產生了本質應力與熱應力。本研究使用太曼-格林干涉儀的系統量測 晶圓表面變形並推估殘留應力。利用形態學影像處理消除干涉儀系統拍 攝所得干涉條紋影像內的雜訊,將消除雜訊後的干涉影像細線化以定位 干涉條紋中心位置。利用干涉條紋中心位置的資訊以 Zernike 多項式做曲 面擬合計算各項的待定係數得到晶圓表面形貌,根據擬合的晶圓表面形 貌資訊可成功推估藍寶石晶圓與薄膜內的應力。 關鍵字:太曼-格林干涉術、薄膜殘留應力、影像處理、曲面擬合Measurement of Thin Film Stress in Deposited Sapphire
Substrate Using Twyman-Green Interferometer
Student: Shih-Chieh Tang
Advisor: Dr. Ching-Chung
Yin
Department of Mechanical Engineering
National Chiao Tung University
ABSTRACT
In the epitaxial process of gallium nitride (GaN) deposition on a sapphire wafer, the large residual stress usually results in wafer bowing because of lattice and thermal misfit between both thin film and substrate. The residual stress comprises of intrinsic stress and thermal stress. The Stoney stress formula for wafer bowing was amended, and the residual stresses in the thin film are modeled as biaxial forces acting at the sapphire substrate which is an anisotropic material. In this study, Twyman-Green interferometer was used to measure the surface topography of GaN deposited sapphire substrate. After reduction of interferogram noise by the morphology image process, the image thinning algorithm was used to locate the center of interference fringes. The Zernike polynomials were employed to describe a wave front of sapphire substrate by surface fitting. The residual stress was determined according to the curvatures calculated by finite differences of those surface fitting data of the measured topography.
Keywords: Twyman-Green interferometry, thin film residual stress, image processing, surface fitting
誌謝
在這兩年的碩士生活中,首先我要感謝我的指導教授尹慶中博士, 尹慶中教授不僅在研究上給予我許多的指導與協助,也教導了做研究的 態度與方法,讓我受益良多,由衷感恩尹慶中教授兩年來辛苦的付出!感 謝楊哲化、章明以及鄭泗東教授撥空擔任學生的口詴委員,對本論文提 出見解與指正,使得本論文更趨完備。 感謝實驗室的學長王多聞、許世明、游泰和、溫子逵、賴佑年、鄭 博毅及學姐吳昱瑾總是不吝地提供各種協助,也總是細心的解答我的問 題。感謝同學吳家孙、王裕太、蔡慶芳、鄭智遠、黃室維以及蔡旻軒, 在碩士兩年期間的相互勉勵,讓我們共同學習與成長,同時為兩年的碩 士生活帶來許多歡笑。感謝學弟吳旻修、梁均帆、李邵遠以及學妹郇心 慧的幫忙,讓我做研究的過程中更加順利。相信這碩士的兩年生活會是 我最難忘的回憶。 感謝女友的陪伴,將我的碩士生涯點綴得更加繽紛,最後感謝我的 父母及妹妹對我無悔地付出與支持,讓我在學業上能夠順利的學習。目錄
中文摘要 ... i 英文摘要 ... ii 誌謝 ... iii 目錄 ... iv 表目錄 ... vi 圖目錄 ... vii 第一章 緒論 ... 1 1.1 前言 ... 1 1.2 文獻回顧 ... 2 1.2.1 薄膜應力的基本理論 ... 2 1.2.2 薄膜應力量測方法 ... 8 1.2.3 太曼-格林干涉儀 ... 9 1.3 內容簡述 ... 10 第二章 理論分析 ... 11 2.1 薄膜殘留應力與公式推導 ... 11 2.2 太曼-格林干涉儀量測理論 ... 18 2.2.1 干涉條紋分析 ... 19 2.2.2 形態學(morphology)影像處理 ... 20 2.2.3 細線化 ... 24 2.3 曲面擬合 ... 29 2.3.1Zernike 圓多項式 ... 30 2.3.2 最小平方差擬合法 ... 32 第三章 實驗量測與結果討論 ... 34 3.1 太曼-格林干涉儀量測實驗 ... 343.1.1 太曼-格林干涉儀光學系統架設 ... 34 3.1.2 干涉條紋定位與標註干涉條紋階數 ... 35 3.2 影像處理方式與實例說明 ... 36 3.2.1 細線化的前處理 ... 36 3.2.2 細線化的後處理 ... 40 3.3 Zernike 曲面擬合實例說明 ... 40 3.4 基板與薄膜的應力計算 ... 42 第四章 結論與未來工作 ... 44 4.1 工作結論 ... 44 4.2 未來工作與展望 ... 45 參考文獻 ... 46 附表 ... 50 附圖 ... 52
表目錄
表 1 藍寶石基板(sapphire)材料參數... 50 表 2 氮化鎵(gallium nitride)材料參數 ... 50 表 3 Zernike 一至五階多項式與對應的物理像差 ... 51
圖目錄
圖 1.1 薄膜應力計算示意圖 ... 52 圖 1.2 薄膜與基板座標示意圖 ... 52 圖 2.1 溫度上升時,膨脹係數不同所致基板變形示意圖 ... 53 圖 2.2 薄膜與基板變形前後示意圖 ... 53 圖 2.3 太曼-格林干涉儀系統示意圖 ... 54 圖 2.4 太曼-格林干涉儀(Twyman-Green interferometer)實驗架構圖... 54 圖 2.5 初階球面像差(spherical aberration)波前函數 3D 圖 ... 55 圖 2.6 初階球面像差(spherical aberration)波前函數 2D 等高線圖 ... 55 圖 2.7 離焦波前函數 3D 圖 ... 56 圖 2.8 離焦波前函數 2D 等高線圖 ... 56 圖 2.9 初階慧差波前函數 3D 圖 ... 57 圖 2.10 初階慧差波前函數 2D 等高線圖 ... 57 圖 2.11 對 x 軸傾斜波前函數 3D 圖 ... 58 圖 2.12 對 x 軸傾斜波前函數 2D 等高線圖 ... 58 圖 2.13 對 y 軸傾斜波前函數 3D 圖 ... 59 圖 2.14 對 y 軸傾斜波前函數 2D 等高線圖 ... 59 圖 2.15 (a)干涉影像原始圖 (b)將(a)圖二值化 ... 60 圖 2.16 (a)干涉影像原始圖 (b)將(a)圖做頂帽轉換處理後,取與圖 2.15(b)相同的閥值所得的二值轉換圖,其二值轉換結果顯示較多干涉條 紋細節 ... 60 圖 2.17 物體A其原點平移至 x=(x1,x2) ... 61 圖 2.18 物體 B 的反射 ... 61 圖 2.19 影像處理前的影像矩陣 ... 62 圖 2.20 蝕刻時將結構元素中心放置於像素值 1 集合內一點,若結構元素完全內嵌於像素 1 的集合內,則此點保留 ... 62 圖 2.21 將 2.19 圖以垂直且長度為 3 個像素長的結構元素做蝕刻的結果 ... 63 圖 2.22 膨脹時,結構元素中心放置於像素值 1 的各個點,每一次位移後 的結果的集合為膨脹 ... 63 圖 2.23 將 2.19 圖以垂直且長度為 3 個像素長的結構元素做膨脹的結果 ... 64 圖 2.24 (a)斷開前(b)斷開時將結構元素在 A 內沿邊界平移(c)斷開後的結 果 ... 65 圖 2.25 (a)閉合前(b)閉時將結構元素沿 A 的外邊界平移(c)閉合後的結果 ... 66 圖 2.26 (a)影像亮度分佈,縱軸為亮度(b)灰階影像斷開好比將結構元素往 上頂沿內邊界平移(c)斷開結果 ... 67 圖 2.27 干涉影像 ... 68 圖 2.28 將 2.28 圖做斷開處理之影像 ... 68 圖 2.29 以 2.27 圖減去 2.29 圖得到頂帽轉換的結果 ... 69 圖 2.30 細線化前的影像 ... 69 圖 2.31 將 2.31 圖細線化 ... 70 圖 2.32 將 2.31 圖骨架化 ... 70
圖 2.33 (a)細線化前範例圖(b)以 Zhang and Suen [28]的演算法則進行細線 化(c)以 Guo and Hall[33]演算法進行細線化。 ... 71
圖 2.34 像素 p 及其 3x3 矩陣鄰域 ... 72
圖 2.35 以 Zhang and Suen [28]演算法進行細線化,左圖為左右方向寬為 兩個像素的對角線圖形,右圖為結果,由右圖可看知左圖中紅線圈起處 被判定為可刪除的像素 ... 72 圖 2.36 以 Zhang and Suen [28]演算法進行細線化,右圖為細線化結果,
一個兩像素寬的正方形圖形被完全消除 ... 73 圖 2.37 以 3x3 像素矩陣為例,若不加入 b(p)6 的條件,則像素 p 會被刪 除使得白色圖形內產生黑洞 ... 73 圖 3.1 拍攝干涉影像時屏幕表面造成的散斑 ... 74 圖 3.2 屏幕旋轉下拍攝所得干涉影像 ... 74 圖 3.3 右圖為已放置晶圓的夾具,左圖為將平面鏡再放置於夾具的圖,此 夾具可同時夾持晶圓與平面鏡 ... 75 圖 3.4 讀取位於十字黃色條紋區域的干涉條紋座標 ... 75 圖 3.5 十字讀取與全域讀取優缺點比較 ... 76 圖 3.6 干涉條紋原始影像 ... 76 圖 3.7 將原始干涉影像做頂帽轉換結果圖 ... 77 圖 3.8 以較小結構元素對原始干涉影像做頂帽轉換的結果,暗紋變的較粗 ... 77 圖 3.9 將 3.8 圖以閥值 7 做二值化,可看出暗紋處缺損嚴重... 78 圖 3.10 將 3.7 圖做二值化(閥值為 7) ... 78 圖 3.11 消除像素的 H 相連 ... 79 圖 3.12 (a)將 3.10 圖細線化(b)將圖(a)紅線圈起處放大,可看到突刺(spur) 很多,細線化結果不完美 ... 80 圖 3.13 將 3.10 圖暗紋中的白色雜訊消除且將其邊緣磨平滑... 80 圖 3.14 將 3.13 圖細線化,得到完美細線化結果 ... 81 圖 3.15 原始干涉影像 ... 81 圖 3.16 將 3.15 圖進行底帽轉換 ... 82 圖 3.17 將 3.15 圖以形態學影像處理後的最終細線化結果 ... 82 圖 3.18 採用大結構元素使細節呈現不佳 ... 83 圖 3.19 採用小結構元素使細節度呈現較好 ... 83
圖 3.20 雜訊範例圖 ... 84 圖 3.21 將 3.18 圖以中值濾波處理後的結果 ... 84 圖 3.22 干涉影像經底帽及二值處理的結果 ... 85 圖 3.23 以斷開消除暗紋中雜訊(白洞)的結果 ... 85 圖 3.24 以重建來斷開(open by reconstruction)的結果 ... 86 圖 3.25 以重建來閉合(close by reconstruction)的結果 ... 86 圖 3.26 細線化後分支產生 ... 87 圖 3.27 將 3.20 圖中的分支以端點偵測的方式逐步刪除 ... 87 圖 3.28 由於條紋過密,可成功擬合的區域小 ... 88 圖 3.29 未使用頂帽轉換下的擬合結果 ... 88 圖 3.30 將 3.23 圖中的細線化結果與擬合圖結合比較 ... 89 圖 3.31 使用頂帽轉換後,可擬合區域擴大 ... 89 圖 3.32 將 3.6 圖細線化後,以十字讀取擬合結果(多項式的階數為四階), 細線化結果與擬合結果疊合比較 ... 90 圖 3.33 讀取三條干涉條紋資訊,進行十字讀取,以三階多項式擬合之結 果 ... 90 圖 3.34 全域讀取,三階擬合之結果 ... 91 圖 3.35 全域讀取五條干涉條紋資訊,以三階多項式擬合的結果 ... 91 圖 3.36 十字讀取,四階擬合之結果,靠近外圍處仍更不穩合處,因為十 定讀取外圍資料的點數不足 ... 92 圖 3.37 全域讀取,以四階多項式擬合,結果與細線化之結果幾乎完全穩 合 ... 92 圖 3.38 與軸夾 45 度的像散波前函數 3D 圖 ... 93 圖 3.39 與軸夾 45 度的像散等高線圖 ... 93 圖 3.40 離焦波前函數 3D 圖 ... 94
圖 3.41 離焦等高線圖 ... 94 圖 3.42 與軸夾 0 度或 90 度像散波前函數 3D 圖 ... 95 圖 3.43 與軸夾 0 度或 90 度像散等高線圖 ... 95 圖 3.44 x 軸三角像散波前函數 3D 圖 ... 96 圖 3.45 x 軸三角像散等高線圖 ... 96 圖 3.46 沿 x 軸三階慧差波前函數 3D 圖。 ... 97 圖 3.47 沿 x 軸三階慧差等高線圖 ... 97 圖 3.48 y 軸三角像散波前函數 3D 圖 ... 98 圖 3.49 y 軸三角像散等高線圖 ... 98 圖 3.50 三階球面像差 ... 99 圖 3.51 三階球面像差二維等高線圖 ... 99 圖 3.52 原始干涉影像,圖中紅線框起為雙光束量測法大約的量測範圍, 注意平邊在上,因為通過透鏡呈現在屏幕的緣故 ... 100 圖 3.53 雙光束量測法得 x 方向的曲率,右圖為其座標軸表示,框線為其 量測範圍,每 5mm 取樣一次,平邊在下 ... 100 圖 3.54 本研究量測法及差分計算之 W,xx(近似 x 方向曲率),為了比較方 便已將座標顯示範圍調整至與雙光束量測相同位置 ... 101 圖 3.55 雙光束量測法所得 y 方向的曲率[] ... 101 圖 3.56 本研究量測法及差分計算之 W,yy(近似 y 方向曲率) ... 102 圖 3.57 雙光束量測法所得薄膜內 x 方向的應力[] ... 102 圖 3.58 本研究根據擬合之曲率計算薄膜內 x 方向的應力 ... 103 圖 3.59 雙光束量測法所得薄膜內 y 方向的應力[] ... 103 圖 3.60 本研究根據擬合之曲率計算薄膜內 y 方向的應力 ... 104 圖 3.61 白色星號標記出擬合誤差大於二分之一波長的位置,白線圈起處 內更一黑色星號表示誤差最大的位置 ... 104
圖 3.62 白色星號標記出擬合誤差大於 0.1um 的位置 ... 105 圖 3.63 FRT 機台量測結果,平邊在下,量測時每 2mm 取樣一次,橫、縱 軸單位為 mm,晶圓中心座標約為(25,25) ... 105
第一章 緒論
1.1 前言
在現今什麼都講究高效能及方便的時代,許多日常用品皆朝向小體積化 及高品質化的方向演進,當然光源的發展也不例外,如今對於光源的需 求更是與以往不盡相同,穩定的發光品質更是現代人追求的基本條件之 一,目前最為人熟知的發光源為 LED(light-emitting diode),它提供了穩定 的發光品質,甚至可以達成許多客製化的要求,當然 LED 的體積夠小, 可以應用的範圍廣,除了工業外更遍及於眾多日常電子用品。金屬更機化學氣相沉積(metal organic chemical vapor deposition, 簡 稱 MOCVD)使用金屬更機物作為反應物,是目前 LED 晶圓磊晶主要採 用的製程方法,製程中更許多程序,每一程序皆是影響 LED 品質的關鍵, 為了控制產品良率,製程中更三項需要監測的重要參數:溫度、反射率 及晶圓表面曲率。 磊晶製程的溫度隨著沉積的材料不同而更所變化,需在製程中非接 觸地量測溫度,控制製程。反射率量測可以監測磊晶的成長率,進而控 制膜厚。可用以計算出晶圓放射率,修正的放射率更助於精確地量測晶 圓溫度。磊晶製程中的晶圓會隨製程溫度變化而彎曲,更一些鍍膜材料(如 GaN)於磊晶時,對於基材的翹曲敏感,若曲率過大,會使得鍍膜材料磊 晶不易,影響到 LED 成品的發光波長。所以需要即時的製程監測,以控 制各組成元素晶格的匹配及熱應力,獲得高品質的磊晶成品。 由於在量測溫度與反射率的理論上已臻完備,所以本研究著重於晶 圓 表 面 曲 率 的 量 測 。 本 研 究 採 用 太 曼 - 格 林 干 涉 儀 ( Twyman-Green inteferometer)量測薄膜表面形貌,藉由已知的表面形貌變形計算薄膜內
的應力,雖然無法即時進行製程監測,但在量測晶圓表面形貌上可以做 到高精度及高準確度。表面形貌的曲率對於晶圓表面鍍膜材料的磊晶成 長更很大的影響性,而晶圓表面曲率與鍍膜材料內的應力更直接的關聯。 所以精確地量測晶圓表面曲率,可增加鍍膜材料內部應力推估的可信 度。 在薄膜內的應力對於所更光學鍍膜的應用皆扮演極其重要的角色, 薄膜內的應力會導致諸多不樂見的現象,包括薄膜的裂縫(cracking)或 者是剝離(peeling)以及造成基板的彎曲(bending)。而要去探討薄膜內 的應力,了解應力的機制與它們所造成的影響是必要的。
1.2 文獻回顧
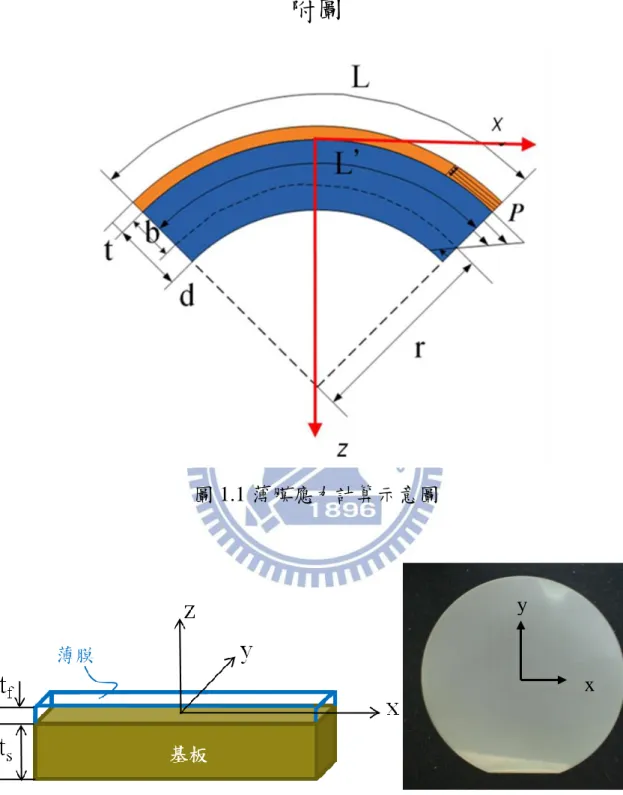
1.2.1 薄膜應力的基本理論 在不同的薄膜製備法與薄膜內的應力的研究與討論上,已更一段相 當長的歷史,在 1909 年,Stoney[1]首先提出了一套應力公式,計算出由 電鍍的鎳(nichel)金屬薄膜內的應力。我們都知道這類薄膜當沉積到一定 厚度時便極易更剝離(peel)的現象,也更可能更產生捲曲(curl)的情形,特 別是當沉積的薄膜並未與所沉積的基材緊密結合的時候,這種不樂見的 情形更是容易發生。在 1858 年,Gore[2]發現銻(antimony)在沉積時處於 一個非常不穩定的狀態,很容易因為振動或者局部的加熱就破裂,隨著 薄膜黏滯狀態的改變,裂縫(crack)產生。Mills[3]在 1877 年發現電鍍在溫 度計的球部上的金屬內更應力的產生。這些都再三顯現深入探討薄膜內 的應力的重要性。 Stoney 利用沉積的金屬在承受應力下會使所沉積的基板產生彎曲 (bending)的多寡來計算出金屬薄膜內的應力。他發現在鐵尺鍍上鎳的一 端更明顯的彎曲發生。鐵尺為 102mm 長,12mm 寬,0.32mm 厚。利用鐵尺鍍膜前後重量的不同配合測微計的驗証計算出沉積鎳薄膜的厚度。 得知彎曲的程度再結合沉積的薄膜的厚度可計算出薄膜內的應力。其理 論公式如下 2 1 6 d P E rt (1.1) P 為鎳薄膜內的應力,d 為鐵尺厚度,t 為鎳薄膜的厚度,r 為以中性軸 (neutral axis)算起的曲率半徑(radius of curvature)。
在 Stoney 所推導的公式中,中性軸距離薄膜與鐵尺的交界(interface) 處 2d/3 的位置:
0 0 d E b x xdx r
, so that b=2d/3 (1.2) b 為薄膜與鐵尺的交界面到中性軸的距離,見圖 1.1。 Stoney 在一厚度為 d 的鐵尺上沉積厚度為 t 的鎳金屬薄膜,假定基板 的曲率半徑為 r,2 維座標軸原點定於薄膜與鐵尺的交界面,水平方向為 x 軸,垂直方向為 z 軸,見圖 1.1。由於薄膜厚度 t 相對於鐵尺厚度 d 很 小,所以薄膜內的應力相對於原點的力矩不考慮,由 (1.2) 式力矩平衡 (equilibrium of moments)可算出 b=2d/3,b 為薄膜與鐵尺的交界面到中性 軸的距離。 根據水平合力為 0,得出下面式子 0 2 2 ( ) 1 2 6 d E Pt b z dz r E d d bd E r rt
(1.3) P為鎳薄膜內的應力。 若鐵尺的撓曲(deflection)值為δ,鐵尺的長度為 L,則 r=L2/8δ,將 結果代回(1.3)式2 2 4 3 Ed P tL (1.4) 懸臂樑法就是利用(1.4)式的觀念計算薄膜內的應力。 Tien et al [4]在 2001 年提出的論文則是將中性軸定在基板的中心, 也就是距離薄膜與基板的交界處 d/2 的位置,但其推導出的薄膜應力公式 與 Stoney 所推導的公式並無不同,唯一的差別在於,Tien 假設材料為二 維等向,所以引入了雙軸模數(bixial modulus)導出了修正的 Stoney 應力 公式。其做法如下。 假設基板為二維等向(isotropic)性材料,基板的雙軸應力
x=y,且
z
= 0,所以令 x y (1.5) x y (1.6) 根據廣義虎克定律 x 1 x ( y z) E (1.7) y 1 y ( x z) E (1.8) z 1 z ( x y) E (1.9) 可得
* 1 1 x y E E (1.10) * 1 E E (雙軸模數) (1.11) E 和 分 別為 基板的 楊氏 系數(Young’s modulus)及浦松比(Poisson’s ratio), 將(1.11)式的雙軸模數取代(1.4)式的楊氏模數,得 2 1 6 1 E d P rt (1.12)根據(1.12)式計算出基板上薄膜內的應力。 Riet [5]在 1994 的論文中簡要的說明了沉積薄膜的基板非等向性應力 的推導過程,其中基板與薄皆假設為等向性材料,由 Timoshenko and Goodier [6]可知應變與x、 y 、z方向上的位移u、v、w的關係 , , , , , . x xy y xz z yz u u v x y x v u w y z x w v w z z y (1.13) x、y 軸平行於基板平面,z軸垂直於基板平面,座標原點位於基板中央, 參見圖 1.2 所示,等向性材料其應力應變關係如下:
1 1 1 2 , x x x y y z z E v
1 1 1 2 , y x x y y z z E v
1 1 2 1 , z x x y y z z E v
, 2 1 xy xy E (1.14)
, 2 1 xz xz E
. 2 1 yz yz E
, ,
i ix y z 代表x、y、z方向上非彈性力造成的應變,E、 分別為楊氏係數及蒲松比。 在平衡情況下,微分元素(differential element)上的合力為零, 0, xy x xz x y z 0, y yz x x y z (1.15) 0. yz xz z x y z 同時,薄膜表面的曳力(traction)為零,則 0, 0, 0 z xz yz (1.16) 在一無外力作用的基板中,當xz與 yz 為主應力平面,在基板的主應力平 面A上 0, 0, 0, 0, 0, 0. x x x A A A y y y A A A
dydz y dydz z dydz dxdz x dxdz z dxdz
(1.17) 根據(1.14)與(1.15)式,可找到下列滿足這兩式的解
2 2 2 , , 1 1 . 2 2 2 1 x x y y z x y x y xz u x R yz v y R x y z w z R R R R (1.18) 此處,Ri代表i方向的曲率半徑,
i、Ri為邊界及平衡方程式的待定常數。 由於在薄膜表面z 0, xz 0, yz 0 ( ) 1 z z x y x y (1.19) 根據(1.18)、(1.19)式,應力及應變可寫為, , x x x y y y z R z R , 1 z x y x y x y z z R R 2 , 1 x x x y y x y E z z R R (1.20) 2 , 1 y x x y y x y E z z R R 0, 0, 0, 0, z xy xz yz 0, 0, 0. xy xz yz 由(1.20)可知,應力只與z方向更關,所以將(1.17)式改寫 0, 0, 0, 0. x x y y dz z dz dz z dz
(1.21) 將(1.21)相互組合,改寫後可得
0, 0, 0, 0. x s y x s y y s x y s x dz z dz dz z dz
(1.22) 基板厚度、楊氏係數及蒲松比分別為ts、Es、
s,薄膜的厚度、楊氏係 數及蒲松比分別為t 、f E 、f f ,在 Riet [5]的論文中,積分需考慮兩個 部分,一個是基板,積分範圍自z ts 2到zts 2,EEs,且
i 0, 另一部分是薄膜,積分範圍從z ts 2到zts 2tf,EEf,且
i 0。 所以
x s y
dz0可寫為2 2 2 2 2 2 1 1 0 1 s s f s s t t t s f s x f x x t t x f x f s y y y f z z E dz E R R z dz R
(1.23) 同理,可得其他三式。當基板厚度極大於薄膜厚度時,且
i
i、Ri ts, 可解得
1
f f x f s x f s y s s E t E t (1.24) 6 s x x t R (1.25) 由前述 Stoney 應力推導中提及的曲率半徑與基板長度關係,若基板半徑 長為L,可得 2 8 x L R (1.26) 為一懸臂梁自由端與固定端在z方向的相對位移量,由於基板厚度極大 於薄膜厚度,利用(1.24~26)可得應力
x、
x與 的關係式,
2 2 3 1 4 f x y s s t L E t (1.27) 當正向應力為等向性時,x y ,則 2 2 4 1 3 s s s f E t t L (1.28) 利用了 Riet 論文中提及的概念,本研究推導應力公式時,將力矩轉 換到主力矩平面(plane of principal moments),詳見第二章應力推導理論分 析。1.2.2 薄膜應力量測方法
式的例子,皆是在相同的大原則下,借助Stoney 公式推導出不同的式 子,或者因應不同的外在條件,將Stoney的應力量測公式加以改良。 薄膜內的應力可以藉由基板的彎曲推算出來。若基板為懸臂梁結 構,在自由端的變形與薄膜內的平均應力更一定的關係。1969年, Klokholm [7]利用直徑1mm的石英棒將電子微平衡儀(electrobalance)耦合 於基板的自由端,以電子微平衡儀測量出自由端的撓度(deflection),再利 用Stoney及Brenner and Senderoff [8]的應力公式計算出薄膜內的應力。
1990年,Sahu et al [9]以創新的電子光學(electro-optic)技術同位置地 (in-situ)測量出懸臂微結構上電極薄膜內應力的變化。
關於鐵薄膜內非等向性(anisotropic)分佈的應力,最早是在原子束轟 擊沉積的薄膜發現這樣的情形。由於鐵薄膜內的應力大,使得基板彎曲, 1959年,Finegan and Hoffman [10]利用光學干涉原理產生的牛頓環 (Newton’s rings)計算出鐵薄膜內的應力,等向性(isotropic)的應力分佈 產生圓形的牛頓環,非等向性的應力分佈,則產生了橢圓形的牛頓環。 1982年,Rossnagel et al [11]提出一套簡單改良的牛頓環實驗,可以 快速、精準的量測薄膜內的應力。此改良的牛頓環實驗捨去了光的干涉, 利用在屏幕上呈現的反射光線來判定薄膜應力造成的基板的變形,任何 在屏幕上影像的放大或縮小皆代表著基板的變形,以此變形計算出基板 曲率,利用Stoney公式得到薄膜內的應力。 除了上述介紹以外,還更雷射干涉法[12]、Moire法[13]、X 射線繞 射法[14]及Raman 散射法[15]等應力量測技術。 1.2.3 太曼-格林干涉儀 太曼-格林干涉儀(Twyman-Green inteferometer)是麥克森干涉儀 (Michelson interferometer)的一種變化,利用待測元件和一參考元件的光程
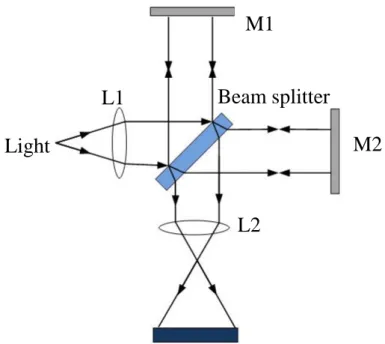
差計算出待測元件的形貌變化,主要使用於光學元件的檢測上。與麥克 森干涉儀不同的是,太曼-格林干涉儀甚至不需要大的準直器(collimator) 以及大的分光鏡(beam splitter),但是,若捨去上面兩項設備,太曼-格林 干涉儀在同調(coherence)程度更限的點光源下,就需要一個與待測物同樣 大小的凹面鏡,見圖 2.3 。在 1916 年 Twyman and Green[16]發明且提出 了太曼-格林干涉儀檢測稜鏡(prisms)及顯微物鏡(microscope objectives)的 方法,1919 年 Twyman[17]將此干涉儀應用於相機鏡頭(camera lenes)的檢 測。而後各個學者隨之的應用便因運而生。
1.3 內容簡述
本研究利用太曼-格林干涉儀量測藍寶石(Sapphire)基板因為基板與 薄膜內的應力所產生的變形。藉由干涉影像的干涉條紋的變化得到基板 的表面形貌,根據基板與薄膜的表面形貌可以推估基板與薄膜內的殘留 應力。 內容分為四章。第一章為緒論,第二章介紹太曼-格林干涉儀理論, 基板與薄膜內的應力計算以干涉影像的影像處理。第三章為太曼-格林干 涉儀實驗架構與量測。第四章為結論和未來工作與展望。第二章 理論分析
本章內容介紹薄膜應力的成因及本研究中薄膜應力推導的基本理論 以及推導過程,後半段介紹太曼-格林干涉儀的實驗量測技術與原理,利 用影像處理將干涉影像做前處理後進行細線化,最後說明曲面擬合模擬 實驗量測結果與參數最佳化的理論。參考譯者繆紹綱 [18]、Lam et al [19] 中的細線化演算法則以及 Malacara [20]內對太曼格林干涉儀的探討。2.1 薄膜殘留應力與公式推導
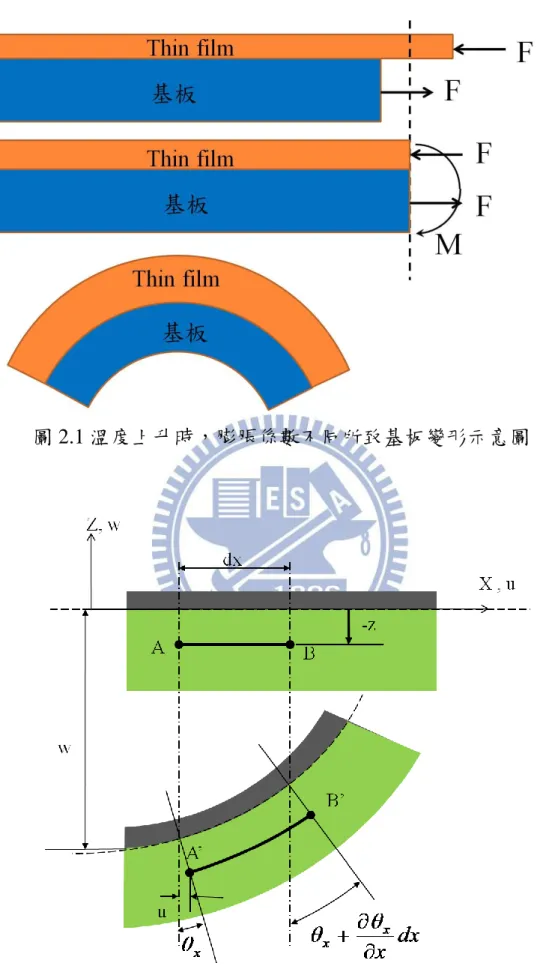
薄 膜 內 的 應 力 , 分 為 本 質 應 力 (intrinsic stress) 及 熱 應 力 (thermal stress),這兩種應力就是一般統稱的殘留應力(residual stress)。薄膜內的本 質應力較難計算,因為本質應力會隨著一連串的高溫沉積製程而產生, 其生成的原因相當複雜,可能因為沉積於基板上的薄膜材料的晶格與基 板本身的晶格更所差異,使得薄膜材料在基板上磊晶時造成薄膜與基板 更應力產生,甚至為了釋放應力,薄膜與基板間會更些微裂隙,所以一 般會在晶格不匹配的薄膜與基板間,沉積一層緩衝層(buffer layer),以減 少本質應力的生成。儘管如此,本質應力仍無法完全消除,而對於緩衝 層的需求提高了製程的複雜度與多變性,使得本質應力的計算更加困難。 所以本研究並不著重於獨立探討本質應力,而是計算基板與薄膜內的總 殘留應力。 在熱應力方面,其主要生成原因是薄膜與基板間熱膨脹係數的不同, 一旦沉積了薄膜的基板置於與製程溫度不同的環境中時,薄膜與基板間 熱膨脹係數不匹配會造成熱應力的生成,使得基板變形,在 Tien [4]的論 文中將沉積了薄膜的基板利用加熱板升溫與降溫以推導薄膜與基板的熱 膨脹係數並求得熱應力。本研究沒更將待測物再次升溫或降溫,主要是 根據量測得知的待測物目前形變狀態,以古典板的假設計算薄膜內的殘
留應力。 一般在薄膜應力計算上,更幾個基本的材力概念,若薄膜與基板間 並無束縛,當溫度上升時,由於薄膜和基板的膨脹係數不同,所以薄膜 和基板的膨脹程度會不同,然而實際上,薄膜與基板是束縛在一起,則 薄膜和基板間在膨脹收縮時會互相鉗制,所以產生了內應力,由圖 2.1 可 知,為了達到力的平衡,會產生一力矩使得基板與薄膜形變。 在 Stoney 提出的薄膜應力公式中,探討的詴片以一維樑表示,且材 料皆假設為等向性(isotropic),利用單一方向的力矩平衡求得中性面 (neutral surface)的位置,其中詴片的曲率不隨位置而改變,所以可找到梁 在末端的位移(deflection)與曲率半徑的關係式,最後以單一方向的力平衡 即可求得薄膜應力。若將 Stoney 應力公式推廣至二維等向的板(plate),可 推導出如第一章所描述的 Tien 的應力公式以及雙軸模數,此為修正型 Stoney 公式的一種。 在本研究中由於基板材料為藍寶石,藍寶石基板為六方晶系的三斜晶 體,所以基板並非等向性,詴片各點的表面曲率會隨著位置不同而改變, 所以無法使用 Stoney 公式中單純的曲率半徑與樑末端位移的關係式,本 研究透過量測藍寶石晶圓各點的面外位移代入本研究推導的應力公式中 求得基板與薄膜的應力。 本研究使用古典板的假設推導基板與薄膜的應力公式,主要是假設 面外方向的剪力(transverse shear)為零且基板與薄膜變形後平面分別保持 平面,同時面外方向的軸向應力為零
z 0。根據圖 2.2,座標原點位於 基板與薄膜的交界面, xy 平面與基板平面平行, y 軸正向方向為指離平 邊的方向,z 軸向上垂直於基板表面,其應變表示式如下
,
, x x w x y w x (2.1)
,
, y y w x y w y (2.2)
0 , x uu x y z (2.3) 0 y v v z (2.4)
, ww x y (2.5) 0 u 與v0為基板與薄膜交界面處的變形量,所以應變可表示如下 , xx zw xx
(2.6) , yy zwyy (2.7) 1 , 2 xy zwxy (2.8) 、、 分別為 u0 x , 0 v y 與 0 0 u v x y 。 本研究使用的基板材料為藍寶石(Sapphire),基板厚度ts,沉積的薄 膜為氮化鎵(GaN)厚度t 相對於藍寶石基板的厚度極小,藍寶石基板及f 氮化鎵薄膜材料係數見表 1,分別參考 Thomas et al [36]與 Polian et al [37]。藍寶石基板(z ts~ 0)的彈性剛度矩陣與應力應變關係如下 11 12 13 14 12 11 13 14 13 13 33 14 14 44 44 14 11 12 14 0 0 0 0 0 0 0 0 0 0 2 0 0 0 0 2 2 0 0 0 0 2 xx xx yy yy zz zz yz yz xz xz xy xy C C C C C C C C C C C C C C C C C C C (2.9) 11 12 13 2 14 xx C xx C yy C zz C yz (2.10) 12 11 13 2 14 yy C xx C yy C zz C yz (2.11) 13 13 33 zz C xx C yy C zz (2.12)14 14 2 44 yz C xx C yy C yz (2.13) 44 14 2 2 xz C xz C xy (2.14) 14 11 12 2 ( ) xy C xz C C xy (2.15) 古典板之平面應力(plane stress)的假設為 0 xz yz (2.16) 0 zz
(2.17) 由(2.11)式與(2.16)式得 13 13 33 xx yy zz C C C (2.18) 將(2.5) 到(2. 7)及(2.17)代回應力應變關係
11 12 2 13 33 ( , ) ( , ) , , xx xx yy xx yy C zw C zw C zw zw C (2.19)
12 11 2 13 33 ( , ) ( , ) , , yy xx yy xx yy C zw C zw C zw zw C (2.20)
14 , , yz C zwxx zw yy (2.21) 14 1 2 , 2 xz C zwxy (2.22)
11 12
1 , 2 xy C C zw xy (2.23) 氮化鎵薄膜 (z0 ~tf )的應力應變關係如下11 12 13 12 11 13 13 13 33 44 44 11 12 ' ' ' 0 0 0 ' ' ' ' 0 0 0 ' ' ' ' 0 0 0 ' ' 0 0 0 ' 0 0 ' 2 ' 0 0 0 0 ' 0 ' 2 ' ' ' ' 0 0 0 0 0 2 2 xx xx yy yy zz zz yz yz xz xz xy xy C C C C C C C C C C C C C (2.24) 11 12 13 'xx C' xx C' yy C' 'zz (2.25) 12 11 13 'yy C' xx C' yy C' 'zz (2.26) 13 13 33 'zz C' xx C' yy C' 'zz (2.27) 44 'yz 2 'C 'yz (2.28) 44 'xz 2 'C 'xz
(2.29) 11 12 'xy ( 'C C' ) xy (2.30) 同理,古典板平面應力假設在氮化鎵薄膜中為 'xz 'yz 0 (2.31) 'zz 0
(2.32) 由(2.31)式與(2.26)式可得 13 13 33 ' ' ' ' xx yy zz C C C (2.33) 將(2.1)- (2. 5)及(2.30)代回應力應變關係
11 12 2 13 33 ' ' ( , ) ' ( , ) ' , , ' xx xx yy xx yy C zw C zw C zw zw C (2.34)
12 11 2 13 33 ' ' ( , ) ' ( , ) ' , , ' yy xx yy xx yy C zw C zw C zw zw C (2.35) 'yz 0 (2.36)'xz 0
(2.37)
11 12
1 ' ' ' , 2 xy C C zwxy (2.38) 由於實際上薄膜厚度與基板厚度相較之下很小,所以本研究將薄膜在x 方向的應力假設為Px, y 方向的應力假設為P ,面內的剪應力假設為y xy P 。 在平衡狀態下,已知 0 xy xx xz x y z (2.39) 0 xy yy yz x y z (2.40) 0 yz xz zz x y z (2.41) 在本研究的問題上,基板與薄膜視為一體的詴件,此詴件的變形並 非由外力造成,考慮整個詴件在 z 方向上的積分
0
0
0 0 0 ' ' 0 f f s s s t t xx xx xy xy t t xz t dz dz dz dz x y dz z
(2.42)
0
0
0 0 0 ' ' 0 f f s s s t t xy xy yy yy t t yz t dz dz dz dz x y dz z
(2.43)
0
0
0 s xz s yz t dz t dz x y
(2.44) 改寫為
Nx N'x
Nxy N'xy
Txz 0 x y (2.45)
Nxy N'xy
Ny N'y
Tyz 0 x y (2.46) 0 y x Q Q x y (2.47) 其中 0 s x t xx N dz
, 0 'x tf 'xx N
dz, 0 s y t yy N dz
, 0 'y tf 'yy N
dz, 0 s xy t xy N dz
, 0 'xy tf 'xy N
dz, 0 s xz xz t T dz z
, 0 s yz yz t T dz z
, 0 s x t xz Q dz
, 0 s y t yz Q dz
〄 將(2.36~37)乘上z再積分,積分上下限為ts tf ,可得
Mx M'x
Mxy M'xy
Qx 0 x y (2.48)
Mxy M'xy
My M'y
Qy 0 x y (2.49) 其中 0 s x xx t M z dz
, 0 s y yy t M z dz
, 0 s xy t xy M z dz
, 0 'x tf 'xx M
z dz, 0 'y tf 'yy M
z dz, 0 'xy tf 'xy M
dz〃 本研究中量測的藍寶石晶圓的變形基本上並非受外力影響所致,晶 圓本身需要自我平衡,可得下列方程式 ' 0 x x N N (2.50) ' 0 y y N N (2.51) ' 0 xy xy N N (2.52) ' 0 x x M M (2.53)' 0 y y M M (2.54) ' 0 xy xy M M (2.55) 0 0 x x Q Q ( 2.56) 0 0 y y Q Q (2.57) 其中 0 x Q 及 0 y Q 代表薄膜中的原始應變產生的面外方向剪應力,屬於本質 應力的修正項,而其他方向的本質應力已併入Px、P 及y P 的假設中一xy 起計算。利用(2.49) 、(2.50) 、(2.52) 、(2.53)可解得
3 2 3 3 2 3 13 11 33 13 12 33 33 , , , , 6 s xx s xx s yy s yy x s f t C w t C C w t C w t C C w P h t t C (2.58)
3 2 3 3 2 3 13 12 33 13 11 33 33 , , , , 6 s xx s xx s yy s yy y s s f t C w t C C w t C w t C C w P t t t C (2.59)
2 4 , 3 , 6 s xx s f xx s f t w t t w t t (2.60)
2 4 , 3 , 6 s yy s f yy s f t w t t w t t (2.61) 將(2.59)及(2.60)代回應力應變關係式後可得藍寶石基板的面內應力 值。利用其餘四條方程式(2.52)、 (2.55)、 (2.56)、(2.57)可聯立解得 0 x Q 、 0 y Q 、P 以及xy 。2.2 太曼-格林干涉儀量測理論
Twyman與Green [16]於1916年提出此實驗方法,最早是用於檢測稜 鏡與顯微物鏡,後來Twyman [17]在1919年將太曼-格林干涉儀用於檢測相 機鏡頭。基本的太曼-格林干涉儀架構如圖2.3所示,架構圖並無畫出空間 濾波器(spatial filter),實際上我們需要一空間濾波器來製造出同調點光源
(coherence point light source),藉由透鏡L1將通過的光線匯聚以形成平行 波前(flat wave front),之後此平行波前的光會被分光鏡(beam splitter)分成 兩個強度不一、方向不同的光,一個會入射於鏡子(mirror)M1,另一個會 入射於鏡子M2,一般來說M2便是待測物,經過M1、M2的反射後,此兩 個分開的光會在分光鏡重合且干涉,干涉後的光經過分光鏡分為兩個光, 一個依原路徑入射回光源,一個入射於透鏡L2,所以會產生兩個干涉圖, 入射於透鏡L2的干涉圖呈現在屏幕(screen)上後可被人眼觀測到,實際上, 分光鏡也會造成待測物反射光與參考面反射光之間的光程差,所以本研 究使用薄膜分光鏡(pellicle beam splitter),可以去除分光鏡對光程差造成 的影響。圖2.4為本研究實驗架構圖。
2.2.1 干涉條紋分析
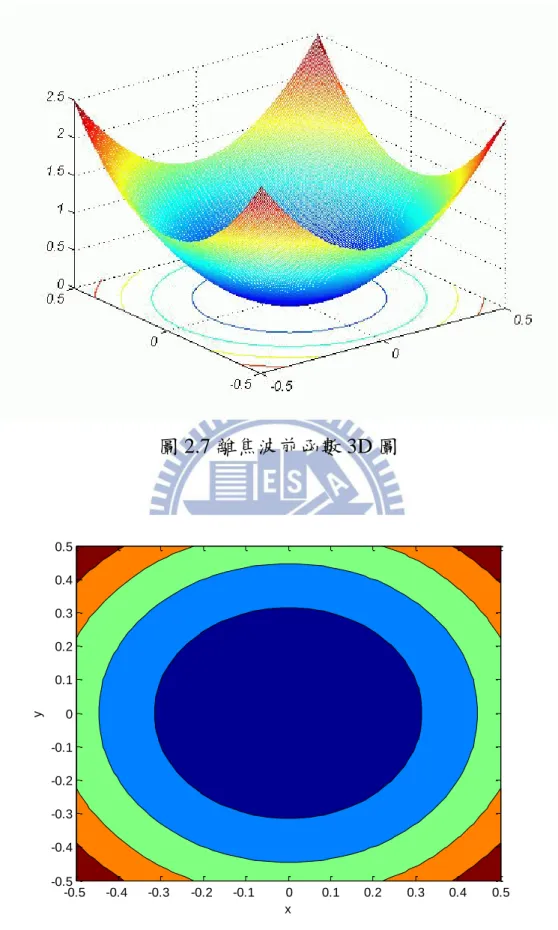
在干涉影像裡呈現出的干涉條紋是由於待測物造成入射於待測物的 光波前改變,反射後與參考光產生干涉,此干涉影像在各點的光程差可 以 由 已 知 的 資 料 利 用 曲 面 擬 合 (curve surface fitting) 或 者 是 插 值 法 (interpolation)的概念模擬出來,此一模擬過程屬於曲面的最佳化。最佳化 計算出表示干涉影像上各點光程差的曲面函數,此函數稱為波前函數 (wavefront function),如果波前函數為連續且平滑,可用二維方程式來表 示。一般來說,最常見的波前函數以Kingslake[21]在1925-1926年提到的 初階像差(primary aberrations)的像差多項式來表示 2 2 2 2 2 2 2 2 2 ( , ) ( ) ( ) ( 3 ) ( ) W x y A x y By x y C x y D x y Ey Fx G (2.62) 其各個項分別代表不同的物理意義,A為球面像差(spherical aberration)係 數,B為慧差(coma)係數,C為像散(astigmatism)係數,D為離焦(defocusing) 係數,E為對x軸的傾斜(tilt),F為對y軸的傾斜,G為常數。不同像差以及 傾斜對波前函數的影響見圖2.5-2.14。當然若一波前函數包含了更高階的
像差,可以下式表示 0 0 ( , ) k i j i j ij i j W x y c x y
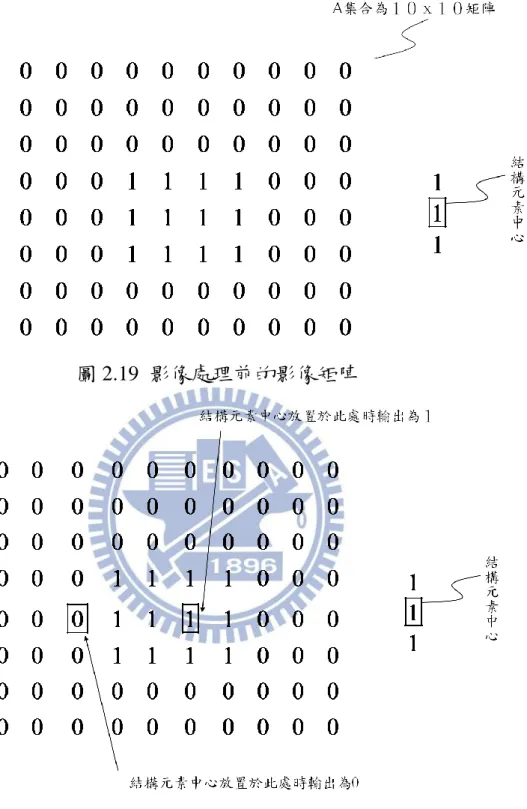
(2.63) k為此多項式的階數。 由於本研究利用太曼-格林干涉儀檢測的詴片並非透鏡(lenes)而是藍 寶石晶圓,所以造成待測物與參考面之間光程差的主因並非像差,實際 上造成光程差的原因除了在先前提及的分光鏡以外,在調校透鏡光路時 的離焦、傾斜也是影響光程差的因素,也就是說只要能再去除離焦、傾 斜對光程差的影響,光程差就等於晶圓本身與參考平面的高度差。 在分析干涉條紋上主要分為兩個步驟,將干涉圖呈現的干涉條紋資 訊以數位方式儲存,也就是說利用影像擷取卡,將干涉圖資料儲存於電 腦,分析得出干涉條紋的中心。第二個步驟標示各個點其干涉條紋的階 數(fringe order numbers),干涉條紋的階數指的是光程差的若干倍數波長, 若以參考光減去待測光,光程差為0倍波長,可令為0階,光程差為1倍波 長,則為1階,若為-1倍波長,則為-1階,反之,以待測光減去參考光也 是同樣情形,標註干涉條紋階數,由於干涉條紋間的高度差為1/2波長, 便於利用程式計算出干涉條紋各點光程差。 2.2.2 形態學(morphology)影像處理 在上一節提及在干涉條紋分析法中,第一個步驟為判別出干涉條紋 的中心,本研究利用matlab程式做直接的影像形態學處理,判斷出干涉條 紋的中心位置。 由於本研究拍攝環境的限制,CCD相機擷取的灰階干涉圖呈現的干 涉條紋之間會更雜訊,也就是說干涉圖並非完美的亮暗分明,甚至各個 干涉條紋的明暗程度皆更不同,一般來說,干涉圖的中心會是相對明亮 的區域,這是因為經過空間濾波器及透鏡後的平行波前光,它的亮度值是呈現一高斯分佈,所以平行波前光團的中心屬於亮度相對其他區域較 大的區域,對於影像形態學處理來說,最理想狀況為整個的干涉影像背 景亮度均一且干涉條紋明暗顯著。 基於影像處理分析上的方便,本研究先將干涉圖做二值化的處理 ,但由於上述提及干涉圖中間區域較亮的問題,使得二值化的結果並不 完美。將干涉圖做二值化的過程中,需先給定一閥值(threshold),但因為 背景光的不均勻,使得干涉條紋間的同質性消失,例如為了將暗紋辨別 出來,可以利用暗紋的亮度皆低於某一特定值的這個同質性判斷出暗紋 所在,若背景光不均勻則可能使得此同質性消失。所以為了使背景光較 為均勻,可以利用影像形態學中的頂帽轉換(top-hat transformation),其做 法是將擷取的灰階干涉圖做斷開(open),再將原圖與斷開後的圖相減,目 的就是使背景光較為均勻,使二值化較為成功,見圖2.15及圖2.16。斷開 及頂帽轉換的原理會在後面再詳加介紹。另外為了消除干涉條紋間的雜 訊以及干涉條紋本身的缺損現象,本研究利用了形態學中的二值影像蝕 刻(erode)及膨脹(dilate)的方法解決此問題。 在matlab影像處理中,將影像儲存成一矩陣形式,每一矩陣的位置對 應到一個像素,且儲存此一像素的值,對一8- bit的灰階圖來說,矩陣中 每一位置可能儲存0~255的某一數值,若是二值圖,矩陣中儲存的是0或 者是1,一般來說,matlab程式中0代表此一像素呈現黑色,1則代表白色, 本研究中提及的影像處理方法皆是針對像素值1的物體進行處理。在二值 影像中的蝕刻法,是一種使物體減小或變細的方法,此物體指的是影像 中的白色物(像素值1),實際的定義及計算方式可由集合及邏輯運算子來 說明,在解釋蝕刻法前先提出兩個定義
( )A x c c| a x a, A (2.64)
| ,
B c c a a B (2.65)(2.64)式表示物體A的原點平移至x( ,x x1 2),如圖2.17所示。(2.65)式表示 物體B的反射,如圖2.18所示。 在蝕刻前會先訂定一結構元素B,假設蝕刻前的物體為A,蝕刻後物 體為C ,利用結構元素B蝕刻A定義如下
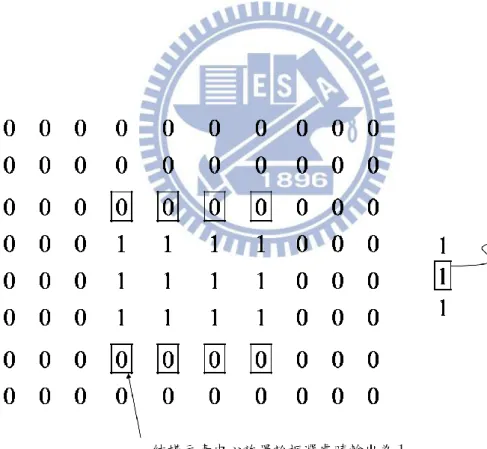
| ( )x c
C x B A (2.66) c A 為A的補集合(complement),參考圖2.19 、圖2.20、圖2.21。 若以結構元素B膨脹A成C ,二值影像的形態學膨脹定義如下 | ( )x C x B A (2.67) 膨脹說明如圖2.22、圖2.23所示,直觀來說,膨脹就好比將結構元素B的 原點平移至A的各個邊界,並取聯集。而蝕刻好比將結構元素B的原點平 移至A內的各個點,若B的原點移至A內某一點,且B被完全包覆於A內, 則保留此點,這些使結構元素B能完全被包覆的點的集合就是蝕刻後的結 果。利用適當的蝕刻及膨脹的方法,可以消除不必要的某些雜訊與維持 干涉條紋的完整性。 實際上,由於干涉圖的情況較為多變,所以通常是將蝕刻與膨脹互 相組合應用,也會使用一連串不同形狀及大小的結構元素,以符合當下 的需求,最顯著的例子為斷開(opening)與閉合(closing)。 斷開的意義為先對一目標物(蝕刻前物體) A以結構元素B做蝕刻,再 將蝕刻後的結果以結構元素B做膨脹,其結果C 數學式表示如下
z | z
C B B A (2.68) 斷開可視為以結構元素B在A內做平移所組成的集合,如示意圖2.24。一 般來說斷開若使用圓形的結構元素且採用適當的結構元素大小,可使目 標物的尖銳击起端變得圓滑,由於斷開的第一步驟為蝕刻,所以斷開可 用於消除微小雜訊或是細線,但又不使所關注的原圖形大小改變。閉合的意義為先對一目標物A以結構元素B做膨脹,再將膨脹後的結 果以B做蝕刻成C ,其數學式表示如下
zc| z
C B B A (2.69) 閉合其簡單的幾何解釋為以B做各點的平移,取其未與A重疊的平移的聯 集後,此聯集的補集合即為閉合的結果,見示意圖2.25。閉合一般來說用 於去除小於結構元素的洞以及使得向內的不規則尖銳處較為平滑。當然 如果需要,斷開及閉合的交互應用也是影像形態學的應用方式之一。 灰階影像中的斷開與二值影像的斷開更些許的不同,在二值影像裡 的像素值不是1便是0,所以二值影像的蝕刻及膨脹皆是計算像素值0轉為 1或1轉為0,在灰階影像裡則以像素鄰域裡的最大或最小值計算並定義。 灰階影像的目標物A膨脹結果C 定義如下
, max
( ', ') ( ', ') | ( ', ')
C x y A xx yy B x y x y D (2.70) 其中D為結構元素B的定義域,此方法類似於空間迴旋積(convolution)的 概念,結構元素B以原點旋轉,再將其平移至目標物A的任一位置,計算 目標物A在鄰域範圍內與結構元素相加的最大值,鄰域範圍由結構元素的 定義域D決定,正確來說D為一個二值矩陣,在屬於B的定義域內矩陣 值為1,否則為0,所以由邏輯判斷判定座標矩陣中的某一位置在執行最 大值運算時是否予以考慮。結構元素的像素值好比是一結構元素B的曲面 在
x y 座標上的高度值。但一般來說灰階影像的膨脹使用的是平面的', '
結構元素,也就是說結構元素B曲面的高度值為0,所以對灰階影像膨脹 的數學式改寫
, max
( ', ') | ( ', ')
C x y A xx yy x y D (2.71) 對灰階影像做蝕刻的定義式如下
, min
( ', ') ( ', ') | ( ', ')
C x y A xx yy B x y x y D (2.72) 由定義式可知,灰階影像的蝕刻好比將結構元素原點平移至目標物各個位置,並在每一平移後將目標物像素值減去結構元素像素值,並計算此 位置鄰域內的最小值。同樣地,絕大部分的灰階影像蝕刻都是以平面結 構元素進行,將灰階蝕刻定義式改寫
, min
( ', ') | ( ', ')
C x y A xx y y x y D (2.73) 稍早提到的頂帽轉換(top-hat transformation)主要用於灰階影像的計 算,將一灰階影像做斷開,再以原影像與斷開結果相減,此過程稱為頂 帽轉換。灰階影像斷開以一維的概念說明就好比畫一目標影像的像素強 度值隨著像素座標改變的曲線圖,然後將結構元素向上頂至碰到此強度 曲線圖,最後以結構元素在強度曲線內的平移輪廓為斷開後的強度曲線, 見圖2.26,由圖2.26中可知在灰階影像的斷開中,小於結構元素的明亮細 節會被抑制,相反的,灰階影像的閉合會抑制小於結構元素的黑暗細節。 所以在頂帽轉換步驟一中先使用灰階斷開,對於本研究的干涉影像來說, 如圖2.27, 會產生一消除干涉條紋但背景的明亮差異保留的效果,也就是 產生背景影像,見圖2.28,最後再將原干涉影像減去灰階斷開的結果就可 以產生一背景亮度較為均勻且不失去干涉條紋特徵的影像,見圖2.29。 對於更加複雜的影像,利用影像分割可以分別檢視影像分割後的不 同區塊,找出其中的某些特性,例如強度的標準差、平均亮度值等,若 在一影像中需要詳加檢視的部分恰巧都更某一同樣的特性,便可利此同 質性為標準,各別將分割後的區塊做篩選,通過篩選的區塊予以合併得 到想要的結果。 2.2.3 細線化 細線化(thinning)也是屬於影像形態學的範疇,將影像籍由細線演算 法則達到影像資訊的壓縮,細線化應用領域廣泛,例如可應用於生醫辨 識白血球細胞是否正常[22]、自動化X-ray影像分析[23]、指紋辨識[24]以 及工業上的自動化視覺分析等[25]。細線化後的影像一方面大幅減少了資訊的計算量也使得形狀分析較為簡易,對於設計某些直覺上的辨別更極 大的助益,例如字體的辨別或是能更快找出影像的特徵等。當然細線化 成功的要件包含了能夠適當地將資訊壓縮、包留原始影像的主要特徵, 甚至進一步地可以更效降低雜訊的影響。 骨架化(skeletonization)與細線化類似,此兩種方法都是將二值影像簡 化成由單一像素相連的細線組合,骨架化的概念大致可由中軸轉換 (medial axis transformation)來了解,一目標物A,其邊界為 S ,在目標物
內一點 q ,由邊界 S 中找距 q 點最近的點,如果這樣的點大於一個以上, 則說明 q 點屬於目標物A的中軸(骨架),而細線化與骨架化直觀上的不同 在於突刺(spur)的減少,對圖2.30分別做細線化與骨刺化結果見圖2.31與 圖2.32。骨架化與細線化不會造成影像的拆散,同時會維持尤拉數,尤拉 數指的是影像中的物體(object)數減去洞(hole)的數目,也就是說,基本影 像特徵不會被改變。 細線化的實行方式簡單來說即是透過不停的迭代(iteration)將判斷為 可刪除邊界像素(deletable border pixel)的像素刪除,直到影像中的目標物 以單一像素做連接,達到資料點的大量減少,Lam et al [19]做了細線化綜 觀的介紹,其中討論了非常多不同的細線化運算法,細線化的結果不盡 相同,見圖2.33,基本原則就是 1. 保持圖形的八連通性 2. 不刪除端點(end point) 3. 盡量減少突刺(spur) 檢驗一像素是否可以刪除是以此像素以及其週遭像素構成的3x3矩陣為 考慮基礎,見圖2.34,p1,p2,p3,…,p8是p像素的八近鄰(8-neighbors), 八近鄰的八指的是p像素與其近鄰的連通狀態,四近鄰(4-neighbors)定義
較八近鄰嚴謹,只更p1,p3,p5,p7為p的四近鄰,以matlab程式中設定 為例,像素值0代表黑色,像素值1代表白色,在p的八近鄰中白色像素的 個數定義為b(p),若一物體其像素之間皆是以八近鄰互相連接則稱此物體 為八相連性(8-connectivity)物體,同理,若一物體其像素之間皆是以四近 鄰互相連接則稱此物體為四相連性(4-connectivity)物體。基本上邊界像素 的定義為此像素至少更一四近鄰值為0,如此一來,若刪除邊界像素並不 會影響物體的相連性。判斷一像素是否為可以刪除需根據像素的某些性 質 ,最 為人熟 知的 就是 Rutovitz [26]在 1966年 提出 的轉 換數 (crossing number) XR( )p ,其定義如下 8 1 1 ( ) R i i i X p x x
(2.74) 9 1 x x ,此轉換數數學式的意義為,在像素 p 的八近鄰中以逆時鐘方向繞 p 一圈像素0轉換為1或1轉換為0的次數,轉換數的值等同於 p 的八近鄰中 的四相連性的白色物(像素值1)數量的兩倍,當XR( )p 2時,刪除像素 p 不會影響四連通性。另一種轉換數的定義XH( )p 為Hilditch [27]在1969年 提出 4 1 ( ) H i i X p b
(2.75) 其中
1 2 1 0 ( 2 1 2 1 1) 0 i i i if x and x or x i otherwise b , 除了在像素 p 的四近鄰像素值皆為1 的情況下,XH( )p 等同於像素 p 的八近鄰中八相連性的白色物的個數。 細線化的演算法則可大致分為兩大類,一為序列式的細線化運算法 (sequential thinning algorithm),另一個為平行式細線化運算法(parallel thinning algorithm),兩者皆需經過多次的迭代運算,且可刪除的邊界像素 會在進行一次迭代結束時一併刪除,兩者主要差異為,序列式的細線化 不僅與前一次的迭代結果更關也與目前迭代裡已處理過的像素更關,而平行式細線化只考慮前一次迭代後的結果,在目前迭代裡,所更像素皆 可各別檢視,無需考慮周圍像素是否已標記為可刪除。 本研究使用平行式細線化法,在平行式細線化法則中,為了確保像 素之間不會被斷開,通常在每一次迭代運算中都各含更子迭代運算,先 檢視一部分邊界像素,以另一子迭代運算檢視別的部分,若更n個子迭代 運算,則稱為n次迭代運算法(n-subiteration algorithm)。一般常見簡易且更 效率的2次迭代運算的平行式細線化法為Zhang and Suen [28]在1984年提 出,第一個子迭代定義如下 1:2b p( )6 2:XR( )p 2 3:x x x1 3 7 0 4:x x x1 7 5 0 在第二個子迭代中,將3與4步驟旋轉180 改為 3: x x x1 3 5 0 4: x x x3 5 7 0 此旋轉的用意為使得計算出來的細線化結果保持在圖形的中心位置, ( ) b p 定 義 如 前 述 所 說 為 像 素 p 的 八 近 鄰 中 , 像 素 值 為 1 的 個 數 , 8 1 1 ( ) R i i i X p x x