行政院國家科學委員會專題研究計畫 成果報告
永磁同步馬達智慧型無感測位置控制技術之研究(II)
計畫類別: 個別型計畫 計畫編號: NSC92-2213-E-009-130- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立交通大學電機與控制工程學系 計畫主持人: 鄒應嶼 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 9 月 29 日
行政院國家科學委員會補助專題研究計畫成果報告
※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※
※
永 磁 同 步 馬 達 智 慧 型 無 感 測 位 置 控 制 技 術 之 研 究 ( 2 / 2 )
※
※
Research and Development of Intelligent Sensorless Position
Control
※
※
Technology for Permanent-Magnet Synchronous Motors (2/2)
※
※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※ ※
計畫類別:■個別型計畫 □整合型計畫
計畫編號:NSC 92-2213-E-009-130
執行期間:92 年 8 月 1 日至 93 年 7 月 31 日
計畫主持人:鄒應嶼 教授
共同主持人:
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:交通大學電機與控制工程系
中 華 民 國 九十三 年 九 月 十 日
1
永磁同步馬達智慧型無感測位置控制技術之研究 (2/2)
Research and Development of Intelligent Sensorless Position Control
Technology for Permanent-Magnet Synchronous Motors (2/2)
計畫編號:NSC 92-2213-E-009-130 執行期限:92/08/01-93/07/31 主持人:鄒應嶼 博士 國立交通大學電機與控制工程系 教 授
一、中文摘要:
(關鍵詞:電控馬達、無刷直流馬 達、永磁同步馬達、無感測位置控制、DSP控制) 本計畫擬發展出一種智慧型的無感測位置控制 (sensorless position control)方法,可應用於凸極式或 非凸極式的永磁同步馬達。本計畫為期兩年,本階 段研究重點為永磁同步馬達泛用型無感測控制技術 之研究,發展一種在不知道馬達參數條件下的的無 感測換相技術,藉由反抗電動勢的換相與大小估計 轉速,一般的反抗電動勢轉速估計法會受到反向二 極體電流的干擾,同時在低轉速時,由於反抗電動 勢也隨之降低,因此轉速估計的效果會變差。為了 克服此一問題,本研究提出一種具有適應能力的轉 子位置偵測方法,此法以訊號處理技術為基礎的信 號注入鎖相迴路轉子位置估計方法,藉由轉子磁場 的變化,偵測調變波之相角變化,藉此估計轉子位 置,所提出的方法可分別適用於方波型與弦波型永 磁同步馬達。本研究特別著重於電腦模型與模擬方 法的發展,完成硬體實驗平台的整合測試,實驗結 果顯示良好的暫態與穩態響應。英 文 摘 要 :
(Keywords: integrated motor drive(IMD), brushless dc motor (BLDCM), permanent-magnet synchronous motor (PMSM), sensorless position control, DSP control)
Sensorless control of PMSM has become an important research issue in recent years due to its wide applications and challenging in motor control techniques. Conventional, the rotor fluxes of a PMSM are detected by using either switch or linear-type Hall sensors for torque and field control. However, these Hall sensors are sensitive noises and temperature variations. This project has developed a new sensorless position estimation scheme with unknown motor parameters. The measured phase current and back emf will be used for the estimation of commutation signals. A compensation scheme has been developed to eliminate voltage distortion induced by the reversed current through free-wheel diodes. Fixed-point realization of the sensorless estimation scheme has been studied. Computer simulation and DSP realization have also been carried out to verify the proposed sensorless position estimation scheme.
二、計畫緣由與目的
永磁同步馬達(PMSM)的轉子由永久磁鐵 構成,根據轉子磁通的分佈可分為:梯形與正 弦波兩種。梯形波的永磁同步馬達其定子電流 在穩態響應時為直流電流,一般亦稱之為無刷 直流馬達(BLDCM)。正弦波的永磁同步馬達其 定子電流在穩態響應時為弦波,一般稱之為永 磁交流馬達(PMACM)。 永磁同步馬達通常需要藉由一個轉子位置 轉換檢出器來回授轉子磁場的位置,再藉由定 子電流控制定子磁場使其與轉子磁場垂直,達 到最佳的扭矩控制效果。然而,在某些特別的 應用場合,如冷凍壓縮機,此一回授元件不僅 增加成本、易受撞擊,也難以承受惡劣的高溫 環境。因此如何在去除轉子回授元件的前提 下,仍能達到良好的控制效果,遂發展出無感 測驅動技術[1]-[12]。 無感測驅動技術的主要關鍵在於能否精確 且快速的估計馬達轉子的轉速,目前的轉速估 測方法,大致可分為兩種:馬達參數模擬法與 狀態估測法。馬達參數模擬法又可分為電壓模 型與電流模型兩種[1]。 不論何種估測方法,轉子轉速估測的準確 性主要取決於下列三個前提: 1. 施於馬達電壓的準確性 2. 量測馬達線瞬時電流的準確性 3. 轉速估測器馬達參數的準確性。 但在一個實際的驅動系統,往往因為量測誤 差、參數不確定性、雜訊干擾、與電路的非線 性等因素,影響了轉速估測的準確性。設計一 個性能優越的無感測驅動器,不僅要發展強健 的轉速估測法則,也必須具有電路設計技巧。本研究主要目的在於展出一種可通用的無 感測位置控制方法,可應用於凸極式或非凸極 式的永磁同步馬達。發展可應用於永磁同步馬 達泛用型無感測的控制方法,發展永磁同步馬 達初始角自動偵測技術,著重於 DSP 實現方法 的研究,採用數位信號處理器進行無感測控制 方法實現,並與模擬結果進行分析改善,實現 一個以 DSP 為基礎的永磁同步馬達無感測驅動 器。
三、研究方法與成果
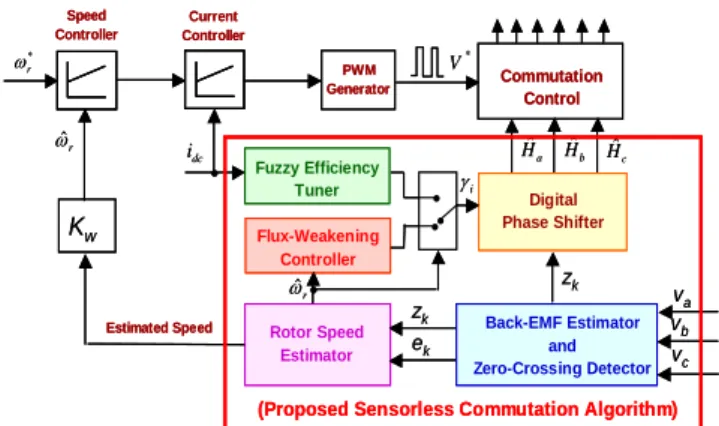
無刷直流馬達無感測控制的主要問題在於 如何在不藉由轉子回授信號的前提下,能達到 良好的換相與轉速控制,甚至更進一步的達到 零轉速控制的目的。1985 年 Iizaka 與 Uzuhashi 等人即提出可以利用端電壓的量測,估測反抗 電動勢的零交越點,並配合一個時間延遲即可 達到無感測換相控制[2]。但是這種方法無法應 用於以弦波電流控制為主的永磁交流馬達,因 為基本上三相電流在任何一時刻均處於連續電 流倒通模式。為了建立一個可適用無刷直流馬 達與永磁交流馬達的無感測控制方法,我們採 取一中主要以向量控制為基礎的控制架構,方 波輸出則為翁的一種特例,圖 1 是永磁同步馬 達無感測轉速控制系統的方塊圖。 在研究方法上,本研究先建立以 DSP 為基 礎的數位控制技術,發展有位置回授的閉迴路 數位伺服控制技術,再發展無位置回授的無感 測驅動技術,最後再發展具有具有參數自調功 能的自調控制技術。本計畫前階段已完成一個 適用於無刷同步馬達驅動器的低成本單晶片 DSP 控制板,並以此為基礎發展無刷同步馬達 驅動器的數位電流控制器與扭矩控制器,根本 的解決無刷同步馬達的瞬時扭矩控制問題。本 計畫同時將針對無刷同步馬達在有電流回授與 位置回授元件的情況下,設計無刷同步馬達驅 動器的數位速度迴路控制器,改善穩態與動態 響應,發展 DSP 控制程式,並完成系統整合與 測試。 目前已發展出應用於極低轉速的無感測控 制技術主要可分為兩類:一類是以模型為基礎 的轉子位置估計方法,另一類則是以信號注入 為基礎的轉子位置估計方法。以模型為基礎的 轉子位置估計方法,機上市根據轉子位置的物 理模型,再以可量測的迴授信號,,圖 2 所示 是一種採用延展型型卡門濾波器(EKF)為基礎 的,的系統方塊圖。 本計畫將發展一種在不知道馬達參數條件 下的的無感測換相技術,藉由反抗電動勢的換 相與大小估計轉速,一般的反抗電動勢轉速估 計法會受到反向二極體電流的干擾,同時在低 轉速時,由於反抗電動勢也隨之降低,因此轉 速估計的效果會變差。在參考文獻 [3]中提出一 種新型的數位式相位移器,此相位移器改善了 之前所提到相位落後會與轉速有關的問題,是 一個不受馬達轉速影響的相位移器,將之稱為 「與頻率無關的相位移器」。但是這種方法, 仍然會受到反抗電動勢訊號干擾的影響。為了 克服此一問題,本計畫將提出一種以訊號處理 技術為基礎的信號注入鎖相迴路轉子位置估計 方法,藉由轉子磁場的變化,偵測調變波之相 角變化,藉此估計轉子位置。 本研究針對兩種應用於無刷直流馬達的無 感測控制方法進行研究,包括了以反抗電動勢 估測為基礎之方法,以及利用定子磁通估測為 基礎之轉子位置估測方法。首先針對無刷直流 馬達的換相特性分析,提出一種改良式的反抗 電動勢估測方法,藉由一個適應型的延遲取樣 器、磁滯比較器,以及一個數位濾波器來改善 零交越偵測的準確度;並採用一個與轉速無關 的數位式相位移器來得到準確的換相估測訊 號,同時進一步針對所提出之相位移器在暫態 加速與具有零交越誤差情形下所造成的相位誤 差進行分析,來驗證其強韌性,並且說明此方 法的實用限制。 本研究提出了一個相位補償機制,可以有 效補償由於濾波器所造成的相位延遲,或是量 測誤差與非理想的反抗電動勢所導致的相位誤 差。此外,本論文提出一種可同時適用於弦波 式與梯形波式永磁交流馬達的轉子位置估測方 法,此無感測方法是藉由三相電壓與電流的回 授訊號可估測出定子磁通變化量,利用加權法 便可以得到轉子位置變化量,進而得到轉子位 置估測;為了有效修正此無感測方法對於參數 變異所造成的估測誤差。 本研究同時也提出一個閉迴路轉子位置估 計自動修正機制,由參數靈敏度分析可以驗證 此修正機制的有效性。在轉子速度估測部分, 本研究比較分析了三種速度估測器對於速度控 制性能的影響,並且藉由電腦模擬驗證所提出3 的無感測控制架構在閉迴路速度控制下的特 性。 圖 3 所示是一種新型的無感測換相控制架 構,此架構同樣是利用量測端電壓來偵測反抗 電動勢的 ZCP,不同的是採用了一個改良的數 位相位移器,主要是簡化了 FIPS 的換相條件, 採用了兩個可獨立運作的計數器,此數位式相 位移器不僅實現方式簡單,同時亦可應用在無 刷直流馬達相位領先或弱後控制的方法上。圖 4 所示是永磁同步馬達通用型轉子位置估測方 塊圖,圖 5 是根據此通用型轉子位置估測方法 所發展的新型無感測轉速位置控制架構系統方 塊圖。 模擬分析 已有相當的文獻探討永磁同步馬達的無感 測控制的方法,然而在實際產品的發展方面, 則不論是以系統為主的無感測驅動器,或是以 晶片為主的無感測控制 IC,不僅十分有限,同 時所採行的方法也通常以簡單為原則,探討其 間的差異,主要在於實際產品發展的過程中, 硬體實現的訊號雜訊比通常限制了整體系統的 性能。本研究究特別著重於電腦模型與模擬方 法的發展,期望在理論發展與實物應用中,建 立有效可行的設計方法。 無感測馬達驅動器的輸出級一般多採用三 相橋式換流器的電路架構,每個功率開關都有 一個反向二極體,其目的是提供負載電感電流 一個連續導通的路徑。理想上,這個反向二極 體是不存在電壓降的,且其開關時間為零,但 實際上這兩者均不成立,在一般具有回授的閉 迴路控制驅動系統,此一非線性特性並不構成 太大的問題,但是在一個無感測馬達驅動器此 一非線性的開關,卻會造成相當大的輸出電壓 誤差,而在低速低電壓輸出時,情況尤其嚴 重。然而,此一問題並無法由增加輸出電壓回 授的方式來解決,因為所加入的低通濾波器又 會導致相位誤差,形成一個新的問題。為了解 決此一問題,本研究發展出一種可以補償反向 二極體電流所造成反抗電動勢干擾的方法,詳 細說明請參考[13],圖 6 是反向二極體電流所 造成的反抗電動勢干擾在改善前後的模擬結 果,可比較換相信號的改善。 EKF EKF 圖 1 永磁同步馬達無感測轉速控制系統方塊圖 圖 2 延展型卡門濾波器(EKF)的系統方塊圖 PWM Generator Commutation Control Current Controller Speed Controller Estimated Speed r ωˆ * r ω Digital Phase Shifter Rotor Speed Estimator * V va vb vc a Hˆ Hˆb Hˆc Fuzzy Efficiency Tuner dc i i γ Back-EMF Estimator and Zero-Crossing Detector zk ek zk Flux-Weakening Controller r ωˆ
(Proposed Sensorless Commutation Algorithm)
Kw PWM Generator Commutation Control Current Controller Speed Controller Estimated Speed r ωˆ * r ω Digital Phase Shifter Rotor Speed Estimator * V va vb vc a Hˆ Hˆb Hˆc Fuzzy Efficiency Tuner dc i i γ Back-EMF Estimator and Zero-Crossing Detector zk ek zk Flux-Weakening Controller r ωˆ
(Proposed Sensorless Commutation Algorithm)
Kw 圖 3 永磁同步馬達新型無感測換相控制與轉速控制架構 Flux Linkage Increments Calculation Rotor Position Increment Estimation Back-EMF Function Generation an v ia a a−L∆i ∆ϕ 1 e 1 − z ++ b b−L∆i ∆ϕ c c−L∆i ∆ϕ 2 e e3 bn v vcn ib ic θˆ ∆ e θˆ
(Internal Closed-Loop Correction)
Flux Linkage Increments Calculation Rotor Position Increment Estimation Back-EMF Function Generation an v ia a a−L∆i ∆ϕ 1 e 1 − z ++ b b−L∆i ∆ϕ c c−L∆i ∆ϕ 2 e e3 bn v vcn ib ic θˆ ∆ e θˆ
(Internal Closed-Loop Correction)
圖 6 反向二極體電流所造成的反抗電動勢干擾(a)改善前 (b)改善後 (比較換相信號的改善) 圖 7 所示是以換相訊號為基礎的 BLDCM 無感測控制模擬結果,圖 8 則是以反抗電動勢 訊號為基礎的響應的模擬結果,模擬分析顯 示,馬達的反抗電動勢包含較為確實的轉速資 訊,因此可以達到較佳的轉速調節效果。圖 9 與圖 10 分別顯示本研究提出方法應用於無刷直 流馬達與永磁交流馬達無轉速控制之模擬結 果。 實驗結果 本階段之研究著重於於永磁同步馬達初始 角自動偵測技術的發展,同時針對無感測位置 控制方法進行定點數值分析與 DSP 實現驗證, 其 中 DSP 將 採 用 德 州 儀 器 新 發 展 的 TMS320F28xx 32 位元單晶片 DSP 控制器。圖 11 是無感測驅動器系統發展平台的硬體架構, Disturbance applied!
Maximum speed estimation error:120 rpm Disturbance applied!
Maximum speed estimation error:120 rpm
圖 7 以換相訊號為基礎的 BLDCM 無感測控制模擬結果 PMSM A B C Rotor Position Estimation Algorithm Back-EMF Estimation and Zero-Crossing Detection Digital Phase Shifter a Hˆ b Hˆ c Hˆ Z PWM Generation and Commutation Logic a H b H c H a v b v c v Rotor Speed Estimation Algorithm Predictive Current Controller e θˆ e θˆ a i b i r ωˆ * v PI Speed Controller >100 <100 r ωˆ r ωˆ r ωˆ * i Startup Controller Efficiency Optimization and Flux-Weakening Control dc i ad θ Fuzzy Optimization Algorithm + − A+ A-B+ B-C+ C-PMSM A B C Rotor Position Estimation Algorithm Back-EMF Estimation and Zero-Crossing Detection Digital Phase Shifter a Hˆ b Hˆ c Hˆ Z PWM Generation and Commutation Logic a H b H c H a v b v c v Rotor Speed Estimation Algorithm Predictive Current Controller e θˆ e θˆ a i b i r ωˆ * v PI Speed Controller >100 <100 r ωˆ r ωˆ r ωˆ * i Startup Controller Efficiency Optimization and Flux-Weakening Control dc i ad θ Fuzzy Optimization Algorithm PMSM A B C Rotor Position Estimation Algorithm Back-EMF Estimation and Zero-Crossing Detection Digital Phase Shifter a Hˆ b Hˆ c Hˆ Z PWM Generation and Commutation Logic a H b H c H a v b v c v Rotor Speed Estimation Algorithm Predictive Current Controller e θˆ e θˆ a i b i r ωˆ * v PI Speed Controller >100 <100 r ωˆ r ωˆ r ωˆ * i Startup Controller Efficiency Optimization and Flux-Weakening Control dc i ad θ Fuzzy Optimization Algorithm + − A+ A-B+ B-C+ C-+ − A+ A-B+ B-C+ C-圖 5 新型無感測轉速位置控制架構系統方塊C-圖
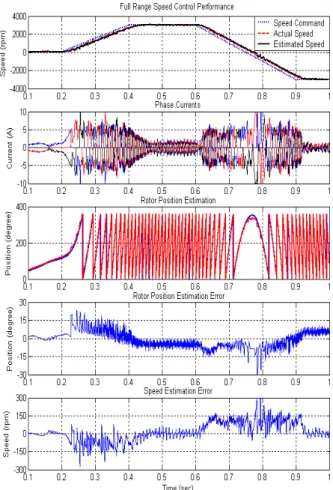
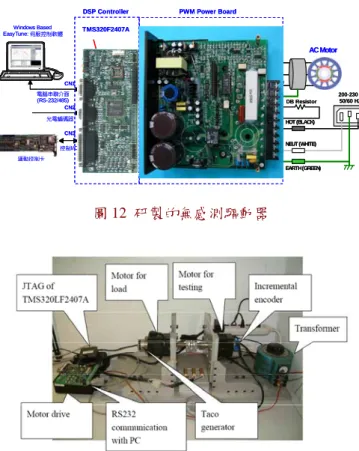
5 圖 12 是研製的無感測驅動器,圖 13 弦波永磁 同 步 馬 達 無 感 測 控 制 實 驗 系 統 , 圖 14 是 PMSM 無感測轉速控制斜坡響應的實驗結果。 在實驗過程中,我們發現在實際馬達驅動 器的設計過程,電磁干擾扮演著非常重要的角 色,例如功率開關的快速電壓變化,會導致系 統共模雜訊的增加,進而影響回授電流的量 測,解決此一問題,不能僅靠回授控制法則或 信號估計理論的強韌隨機程序方法設計濾波器 [14],更重要的是必須根本的降低雜訊源與改 善信號的檢出方式等方向著手。
四、結論與討論
由於無刷直流馬達具有低成本、高效率、 高功率密度、高扭矩的優點,再加上驅動技術 的進步,其在小型電機應用的比重日益提升, 因此進一步的擴大了市場規模。 由於永磁同步馬達轉子磁通分佈的不同, 其驅動方式也隨之而異,其轉速估測的方法也 不同,因此發展出了各種不同的無感測驅動技 術。本計畫針對永磁同步馬達,發展出可同時 應用於無刷直流馬達與永磁交流馬達的無感測 驅動技術。 本研究利用一顆單晶片定點數位信號處理 器完成無感測驅動器之研製,實現所提出之無 感測變速控制法則。實驗結果驗證所提出的無 感測控制架構在寬廣的速控範圍以及負載變化 下都能保持良好的動態響應,同時亦可適用於 操作在正反轉變化的情況。 圖 9 BLDCM 無感測轉速控制斜坡響應的模擬結果 圖 10 PMSM 無感測轉速控制斜坡響應的模擬結果 Disturbance applied!Maximum speed estimation error:50 rpm Disturbance applied!
Maximum speed estimation error:50 rpm
圖 8 以 Back-EMF 反抗電動勢訊號為基礎的 BLDCM 無 感測控制之模擬結果
電腦串聯介面 (RS-232/RS485) CN3 CN1 CN2 AC SERVO MOTOR 功率板 控制板 Encoder CN4 外部控制訊號 光電編碼器 Windows Based 伺服控制軟體 運動控制卡
DSP-Based Sensorless Motor Drive
Digital Motor Control
圖 11 無感測驅動器系統發展平台的硬體架構 EARTH (GREEN) HOT (BLACK) W (Black) V (White) U (Red) NEUT (WHITE) DB2 DB1 FG FG N L 200-230 V 50/60 HZ DB Resistor AC Motor CN4 CN1 CN2 CN3 電腦串聯介面 (RS-232/485) 控制I/O Windows Based EasyTune: 伺服控制軟體 運動控制卡 光電編碼器 TMS320F2407A IPM DSP Controller PWM Power Board
EARTH (GREEN) HOT (BLACK) W (Black) V (White) U (Red) NEUT (WHITE) DB2 DB1 FG FG N L 200-230 V 50/60 HZ DB Resistor AC Motor CN4 CN1 CN2 CN3 電腦串聯介面 (RS-232/485) 控制I/O Windows Based EasyTune: 伺服控制軟體 運動控制卡 光電編碼器 TMS320F2407A IPM DSP Controller PWM Power Board
圖 12 研製的無感測驅動器
圖 13 弦波永磁同步馬達無感測控制實驗系統
圖 14 PMSM 無感測轉速控制斜坡響應的實驗結果
五、參考文獻
[1] J. P. Johnson, M. Ehsani, and Y. Guzelgunler, “Review of sensorless methods for brushless DC,” IEEE IAS Annual
Meeting Conf. Rec., vol. 2, pp. 1033-1040, 1999.
[2] K. Iizaka, H. Uzuhashi, et. al., “Microcomputer control for sensorless brushless DC motor,” IEEE Trans. Ind. Applicat, vol. 21, no. 4, pp. 595-601, May/June 1985.
[3] D. H. Jung and I. J. Ha, “Low-cost sensorless control of brushless DC motors using frequency-independent phase shifter,” IEEE Trans. Power Electron., vol. 15, no. 4, pp. 744-752, July 2000.
[4] J. C. Moreira, “Indirect sensing for rotor flux position of permanent magnet AC motors operating in a wide speed range,” IEEE Trans. Ind. Applicat., vol. 32, no. 6, pp. 1394-1401, Nov./Dec. 1996.
[5] A. Consoli, S. Musumeci, A. Raciti, and A. Testa, “Sensorless vector and speed control of brushless motor drives,” IEEE
Trans. Ind. Electron., vol. 41, pp. 91-96, Feb 1994.
[6] K. Tatemarus, D. Hamada, K. Uchida, S. Wakao, and T. Onuki, “New approaches with sensorless drives,” IEEE Ind. Applicat.
Magazine, vol. 6, pp. 44-50, July/Aug. 2000.
[7] R. Dhaouadi, N. Mohan, and I. Norum, “Design and implementation of an extended Kalman filter for the state estimation of a permanent magnet synchronous motor,” IEEE
Trans. Power Electron., vol. 6, pp. 491-497, July 1991.
[8] B. Terzic and M. Jadric, “Design and implementation of the extended Kalman filter for the speed and rotor position estimation of brushless dc motor,” IEEE Trans. Ind. Electron., vol. 48, pp. 1065-1073, Dec. 2001.
[9] N. Matsui, “Sensorless PM brushless DC motor drives,” IEEE
Trans. Ind. Electron., vol. 43, pp. 300-308, April 1996.
[10] B. J. Brunsbach, G. Henneberger, and T. Klepsch, “Position controlled permanent magnet excited synchronous motor without mechanical sensors,” IEE Power Electron. and
Applicat. Conf. Rec., vol. 6, pp. 38-43, 1993.
[11] M J. Corley and R. D. Lorenz, “Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds,” IEEE Trans. Ind.
Applicat., vol. 34, no. 4, pp. 784-789, July/Aug. 1998.
[12] R. Mizutani, T. Takeshita, and N. Matsui, “Current model-based sensorless drives of salient-pole PMSM at low-speed and standstill,” IEEE IAS Annual Meeting Conf. Rec., pp. 445-450, 1997. [13] 鄭光耀、鄒應嶼, “無刷直流馬達無感測控制方法之研 究,"第三屆電力電子研討會, pp. 335-340, Sept. 17-18, 2004.. [14] 葛育中、鄒應嶼, “卡曼濾波器應用於永磁同步馬達無感測 控制之研究,"第三屆電力電子研討會, pp. 590-595, Sept. 17-18, 2004.