行政院國家科學委員會專題研究計畫 成果報告
可變輸出力及位移量微致動器之設計
計畫類別: 個別型計畫 計畫編號: NSC92-2212-E-151-002- 執行期間: 92 年 08 月 01 日至 93 年 07 月 31 日 執行單位: 國立高雄應用科技大學機械工程系 計畫主持人: 黃世疇 報告類型: 精簡報告 處理方式: 本計畫可公開查詢中 華 民 國 93 年 9 月 26 日
行政院國家科學委員會補助專題研究計畫
v 成 果 報 告 □期中進度報告可變輸出力及位移量微致動器之設計
計畫類別: ■個別型計畫 □ 整合型計畫
計畫編號:NSC 92-2212-E-151-002-
執行期間: 92 年 8 月 1 日至 93 年 7 月 31 日
計畫主持人:黃世疇
共同主持人:
計畫參與人員:邱建清
成果報告類型(依經費核定清單規定繳交):■精簡報告 □完整報告
1.1.1 本成果報告包括以下應繳交之附件: □赴國外出差或研習心得報告一份 □赴大陸地區出差或研習心得報告一份 □出席國際學術會議心得報告及發表之論文各一份 □國際合作研究計畫國外研究報告書一份 1.1.2 1.1.3 處理方式:除產學合作研究計畫、提升產業技術及人才培育研究計畫、列管 計畫及下列情形者外,得立即公開查詢 1.1.4 □涉及專利或其他智慧財產權,□一年□二年後可公開查詢執行單位:國立高雄應用科技大學機械工程系
中 華 民 國 93 年 9 月 27 日
摘要 由於電熱式微致動器在高輸出力的特性下,相對的也降低了輸出位移量。所以,當 微系統所需的致動力不大,但對輸出位移量又有某一程度要求時,此種電熱式微致動器 便無法符合要求。所以,本計畫設計一可變輸出力及位移量的微致動器,它是利用一個 可調支點位置的微槓桿機構,一端以電熱式 V 型組合懸樑微致動器作為輸入,此種電熱 式 V 型組合致動器具有高輸出力及低位移量的特性,利用槓桿原理和支點位置的調整, 在槓桿另一端即可達成變輸出力和變位移量的結果。 關鍵字:電熱式 V 型組合懸樑微致動器、微槓桿機構、SU-8 厚膜光阻、微電鑄 Abstract
Due to its easily operating, simple structure and large actuating force, electro-thermo actuator is one of the popular actuation types. However, the character of large output force of electro-thermo actuator has small output displacement. Therefore, this kind of actuator doesn’t meet some micro systems’ demanding of large output displacement and suitable actuating force.
In this project, we try to design an actuator with adjustable output forces and displacements. The proposal design structure is a micro mechanism lever with an adjustable fulcrum. A ‘V’ shape cascaded buckle beam micro actuator is used as an input side. The ‘V’ shape cascaded buckle beam micro actuator with large output force and low displacement. By adjustment of the leverage, we will have different output forces and displacements in another side.
1.
前言
在微機電系統裡,致動器是不可或缺的,且佔有舉足輕重的地位[1]。就像是在常尺 寸下的運動來源,如直線運動或是圓周運動,在微機電系統裡的運動也是如此,所以我 們將這些運動來源稱為微致動器。微致動器的特色是反應快、頻率高、驅動力小、能量 消耗低、控制更精準[2]。 由於電熱式致動器具有高輸出力、驅動電壓低、結構簡單、操作容易等特性,所以 在一些微機電系統裡,電熱式微致動器的使用是相當普遍的。但電熱式微致動器相較於 其它種類微致動器,如靜電式、電磁式致動器等,其輸出位移量較小。所以本計劃希望 能夠以一個具有高輸出力和低輸出位移量的電熱式 V 型組合懸樑微致動器作為輸入,利 用槓桿原理,配合可調槓桿支點位置的機構,此可調支點的作動方式是利用另一個電熱 式單一 V 型懸樑微致動器作運動,於槓桿另一端產生可變的輸出力-位移量,以達成微 機電系統所需的致動力和致動距離。2.
研究目的
本研究希望改善微致動器輸出力與輸出位移無法兼顧的情形,利用電熱式組合 V 型 微致動器具有較高輸出力、較低輸出位移量的特性,使用槓桿原理,結合可調整槓桿支 點位置的機構,將電熱式組合 V 型微致動器高輸出力、低輸出位移,經由此可調支點位 置槓桿機構,將微致動器的輸出力、輸出位移,設計成可依照系統的需要作調整變化。3.
文獻探討
國內對於微致動器設計的研究大部分都是以結構的分析[3、4]、結構改良的性能提升[5、6]、最佳化設計[7]等。國外對於微致動器設計的研究大多是以改變致動方式[8]、 結構方析[9]、結構改良[10、11]、陣列組合的方式[12],以改變輸出力、輸出位移的表 現,但這些改善後的輸出表現是固定的,日後並無法應付因系統需要而須調整輸出表現 的能力。專利部分,相關的有,具有波形樑結構之微致動器、同平面微熱致動器之相關 製造方法、多維可拉伸位移微致動器、電磁式微致動器之製程與結構、高頻寬無反衝力 微致動器、微致動器雙讀寫頭位致感測器等。[13-18]
4.
研究方法
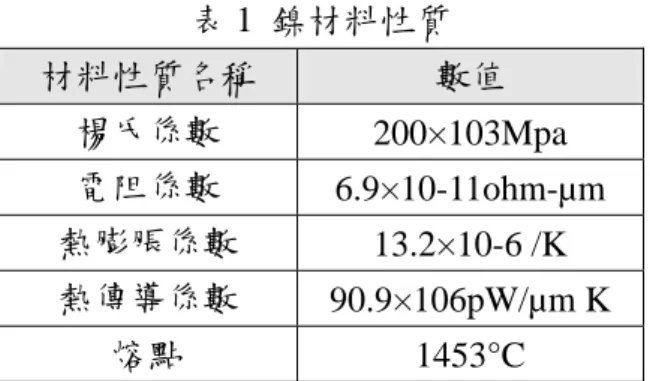
本計畫為了得到可變輸出力及位移量微致動器,設計一個可變支點位置的槓桿機 構,並以電熱式 V 型組合懸樑微致動器驅動。首先設計電熱式組合 V 型微致動器的結 構,並分析、模擬其致動狀態,並討論不同設計參數對微致動器輸出的影響,在實作部 分是以 SU-8 厚膜光阻與微電鑄製程來完成。其 3D 立體模型如圖 1 所示。 圖1 可變輸出力-位移微致動器 3D 立體模型 4.1 電熱式 V 型組合懸樑微致動器 本計畫使用有限元素分析軟體 ANSYS 來分析電熱式 V 型懸樑微致動器在輸入電流 後,因材料本身的電阻造成溫度上升,導致結構體積膨脹,並在 V 型懸樑尖端造成位移, 並分析此致動器之輸出性能。電熱式 V 型懸樑微致動器可以藉由改變輸入電壓、懸樑角 度、懸樑截面積及組合懸樑的數目來改變微致動器的輸出性能。所以,本計劃希望以有 限元素分析軟體 ANSYS 來模擬 V 型懸臂電熱式微致動器在不同參數下的溫度分佈狀 態、輸出位移與輸出力量。 4.1.1 問題定義 一般電熱式 V 型懸樑微致動器大多使用矽作為結構,但本計劃的材料是使用使用 鎳,因鎳具有較大之電阻係數、熱膨脹係數與較小的熱傳導率,所以在電熱變形上有較 好的表現。分析所用到的材料性質列於表 1。為了簡化 V 型懸樑電熱式微致動器的分析, 在分析時設定了一些基本假設,包括材料是均質且等向的、材料的線性行為不會隨溫度 改變、忽略殘留應力的影響、微致動器對空氣無熱損失。在負載方面,本文使用給定電 位差為負載。在邊界條件上,除了兩端固定外,結構可自由變形。表 1 鎳材料性質 材料性質名稱 數值 楊氏係數 200×103Mpa 電阻係數 6.9×10-11ohm-µm 熱膨脹係數 13.2×10-6 /K 熱傳導係數 90.9×106pW/µm K 熔點 1453°C 4.1.2 分析結果 電熱式組合 V 型懸樑微致動器致於兩端電極施加電壓負載,產生電熱變形,尖端將 會往前變形致動,可作為本計劃可變輸出力-位移微致動器之致動源與支點改變機構。 施加不同電壓負載對於微致動器溫度、輸出位移與力量間的關係如圖 2 所示,當施加電 壓由 1V 增加至 5V、V 型懸樑角度固定 4∘、懸樑寬度為 10µm,則微致動器溫度由 50°C 升高至 523°C、輸出位移由 2.72µm 增加至 24.819µm、而力量也由 2964µN 增加至 27034µN(圖 2)。 V 型懸樑的角度對於微致動器輸出性能的影響如圖 3 所示,當懸樑角度由 4∘增加 至 8∘、施加電壓固定 2V、懸樑寬度為 10µm,輸出位移由 5.48µm 降低至 3.06µm、而 輸出力則由 5981µN 增加至 11933µN。所以 V 型懸樑的角度與輸出力成正比、與輸出位 移成反比。 改變微致動器輸出性能主要因素是 V 型懸樑的幾何形狀,而除了懸樑的角度外,另 一因素主要為懸樑的截面積大小,在此我們假設懸樑截面為正方形,所以懸樑截面積以 懸樑寬度來表示。V 型懸樑寬度對微致動器的影響如圖 4 所示,當懸樑寬度由 5µm 增加 至 25µm 時、施加電壓固定 2V、V 形懸樑角度固定 4∘,則輸出位移由 5.925µm 減少至 3.54µm、而輸出力由 1477µN 增加至 37011µN。由此結果可以發現懸樑截面積與輸出位 移成反比、與輸出力則成正比。 當結合多個單一 V 型懸樑微致動器,成為一個組合 V 型懸樑微致動器,懸樑數量 對微致動器輸出性能的影響如圖 5。組合 1 至 5 個 V 型懸樑,在電壓同為 2V、懸樑角 度同為 4∘、懸樑寬度為 10µm 情況下,增加組合懸樑數量對微致動器之輸出位移並無 改變,但輸出力量則由 2950µN 增加至 15400µN。 0 10000 20000 30000 1 2 3 4 5 Voltage (V) force (µN) displacement X 1000 (µm) temperature (°C) 圖2 負載電壓與微致動器溫度、輸出位移和 力量之關係 0 5000 10000 15000 4 5 6 7 8 V-beam angle (∘) force (µN) displacement X 1000 (µm) 圖3 V 型懸樑角度與微致動器輸出位移、 力量之關係
0 10000 20000 30000 40000 5 10 15 20 25 0 5000 10000 15000 20000 1 2 3 4 5 V-beam numbers force (µN) displacement X 100 (µm) V-beam size (μm) force (µN) displacement X 1000 (µm) 圖5 V 型懸樑組合數目與微致動器輸出位 移、力量之關係 圖4 V 型懸樑截面積與微致動器輸出位 移、力量之關係 4.2 實作與量測 本計畫在底板與槓桿機構部分是使用 SU-8 厚膜光阻來作為結構材料,而微致動器 因需要利用電流通過 V 型懸樑產生熱膨脹變形,所以使用金屬材料鎳來作為致動器結 構,微致動器也是使用 SU-8 厚膜光阻經曝光顯影得到光刻模,利用電鑄技術將鎳沉積 於光阻模內,最後將微致動器電鑄結構釋放,可得到此微致動器之結構。 4.2.1 以 SU-8 厚膜光阻製作底板與槓桿機構 在製程上是以 SU-8 厚膜光阻結合犧牲層,將底板與槓桿機構取下,製程流程圖如 圖 6 所示,並配合製程說明如下: 步驟一、將晶圓經由清洗程序清洗後, 塗佈 Polyimide 作為犧牲層。
步驟二、在 Polyimide 上濺鍍一層銅,作為 SU-8 光阻與 Polyimide 的中介層。 步驟三、在銅上面旋轉塗佈厚度為 200µm 的 SU-8 厚膜光阻
步驟四、經微影製程在 SU-8 光阻上得到槓桿機構。
步驟五、移除 Polyimide 犧牲層,將結構釋放,最後以氯化鐵將中介層銅去除。
在底板的設計尚有一隻銷需要製作,本研究是利用雙層 SU-8 技術得到,雙層 SU-8 的製程是在上述步驟五後再途佈上一層 SU-8,再次微影得到,如圖 7。
晶圓 步驟五 步驟四 步驟三 三 步驟二 步驟一 polyimide 銅 SU-8 光阻 圖6 底板與槓桿機構製程流程圖 圖7 雙層 SU-8 製作底板與銷之 SEM 圖片 4.2.2 電熱式 V 型懸樑微致動器之製作 此微致動器的製作是利用 SU-8 厚膜光阻製作光刻模與電鑄技術,以 SU-8 光阻製作 出 100µm 厚度的光刻模,並將鎳電鑄於光刻模內,再將 SU-8 移除,可得到以鎳為材料 的電熱式 V 型懸樑微致動器。製程流程圖如圖 8 所示,並配合製程說明如下: 步驟一、將晶圓經由清洗程序清洗後,濺鍍一層銅作為電鑄種子層。 步驟二、在銅上面旋轉塗佈厚度為 100µm 的 SU-8 厚膜光阻。 步驟三、經微影製程在 SU-8 光阻上得到所需的光刻模,SEM 圖片如圖 9。 步驟四、以 AZ 光阻將不需要電鑄,但卻露出的種子層部分遮蓋,以利電鑄進行。 步驟五、在 SU-8 模具內電鑄鎳約 100µm。 步驟六、移除 AZ 光阻、SU-8 光阻,並以氯化鐵蝕刻銅,得到微致動器結構,SEM 圖片如圖 10。
晶圓 步驟一 銅 SU-8 光阻 步驟二 AZ 光阻 步驟三 鎳 步驟四 步驟五 步驟六 圖8 微致動器製程流程圖 圖9微致動器 SU-8 光刻模 SEM 圖片 圖10雙 V 型組合懸樑電熱式微致動 器 SEM 圖片 4.3 驅動與結果量測 在此說明電熱式微致動器的驅動方法與設備,並量測微致動器尖端最高溫度與致動 位移量等,再以電熱式 V 型懸樑微致動器驅動變輸出力與位移微致動器機構,並量測合 後之可變輸出力與位移微致動器輸出位移等性能,組合後之可變輸出力與位移微致動器 SEM 圖如圖 11。
圖11 經組合後之可變輸出力與位移微致動器 SEM 圖片 光學顯微鏡 Sample 電源供應器 精密移動平台 V 圖12 量測方法示意圖 在電熱式 V 型懸樑微致動器量測上(圖 12),是將微致動器在無輸出負載的狀態下施 加電壓負載,量測得到微致動器輸出位移與尖端最高溫度等數值,而不同驅動電壓與微 致動器尖端輸出位移與最高溫度之關係,如圖 13、圖 14 所示。 組合後的可變輸出力與位移微致動器在相同的輸入位移(22.7µm)下,經由可變支點 微致動器施加不同電壓負載後,導致槓桿支點改變,而使得槓桿輸出端之位移改變,並 與理論計算值相較,如圖 15。 在量測的過程中,發現在微致動器的最高溫度要比分析時的最高溫度高出許多,而 且電壓負載超過 1.2V 後,溫度開始劇烈的上升,在 1.5V 後便因溫度過高使得微致動器 斷裂。會產生此種誤差的原因,最主要是因微致動器在電鑄時難免會有雜質的滲入,造 成微致動器材料實際電阻值與理論值的誤差,使得微致動器的電阻值過高,產生的熱也 愈多。所以本文之微致動器在無輸出負載下,容許最高輸出位移約為 42µm。
0 5 10 15 20 25 30 35 40 45 50 0.4 0.6 0.8 1 Voltage (V) (µ m )
Microactuator output displacement (µm)
0 25 50 75 100 125 150 0.4 0.6 0.8 1 Voltage (V) (℃ ) Temperature(℃) 圖13 輸入致動器驅動電壓與微致動器尖端 輸出位移關係 圖14 輸入致動器驅動電壓與微致動器尖端 最高溫度關係 22 22.5 23 23.5 24 24.5 25 0.4 0.6 0.8 1 Voltage (V) (µ m) 輸出量測值 輸出理論值 圖15 不同可變支點致動器驅動電壓下槓桿 輸出端量測位移與理論位移之關係
5.
計畫成果自評
本文利用一可改變槓桿支點之微機構來達成可變輸出力與位移的微致動器,並以電 熱式 V 型懸樑微致動器作為驅動源,在實作上主要是使用 SU-8 厚膜光阻技術與微電鑄 技術。本文完成之工作如下: (1)利用有限元素分析工具 ANSYS 模擬電熱式 V 型懸樑微致動器的致動,並分析 V 型 懸樑微致動器不同的電壓負載、V 型懸樑角度、懸樑截面積與不同組合懸樑數量對於 微致動器輸出性能的影響。 (2)在實作部分直接以 SU-8 厚膜光阻硬烤後作為微夾撓性機構的材料,此外,在電熱式 V 型懸樑微致動器的製作上,也是利用 SU-8 厚膜光阻以光刻模造技術,結合鎳電鑄 技術得到。 (3)在量測結果上是藉由輸入不同的電壓來量測單一微致動器的輸出位移。並在組合後的 可變輸出力位移微致動器藉由施加不同的電壓於可變支點致動器,使得槓桿支點改 變,量測在不同支點改變量下的輸入與輸出關係。 參考文獻[1]Fujita, “Future of Actuators and Microsystems”, Sensors and Actuators A: Physical, Volume: 56, Issue: 1-2 August, 1996 H. pp. 105-111
[2]H. Ishihara, F. Arai, T. Fukuda, “Micro Mechatronics and Micro Actuators”, Mechatronics, IEEE/ASME Transactions on, Volume: 1 Issue: 1 , March 1996 Page(s): 68 –79
[3]Takeuchi Shoji, Shimoyama Isao, “Selective drive of electrostatic actuators using remote inductive powering”, Sensors and Actuators A: Physica, Volume: 95, Issue: 2-3, January 1, 2002 pp. 269-273 [4]趙鳳翔, 微機電系統之熱致動式微操作器動態模擬分析, 國防大學中正理工學院 兵器系統工程研究所, 2001 [5]余志誠, ”三層多晶矽電熱式微致動器與微滑桿致動系統之製作、分析與研究”, 國立交通大學電機與控制工程學系碩士論文, 1998 [6 張勝智,“雙方向運動微熱-靜電驅動致動器之設計與製作”,國立清華大學動力機械 工程學系碩士班控制組, 2001 [7]陳文誌, “單層薄膜出平面微電熱式致動器”, 國立清華大學動力機械工程學系碩 士班控制組, 2001 [8]蔡瀚毅,“V 型彎曲懸樑結構之熱動式微致動器尺寸及材料最佳化探討”, 國立成 功大學工程科學系碩士論文, 2000
[9]Chang Liu, Yi, Y.W., “Micromachined Magnetic Actuators Using Electroplated Permalloy”, Magnetics, IEEE Transactions on , Volume: 35 Issue: 3 Part: 2 , May 1999, Page(s): 1976 -1985
[10]Q. A. Huang, N.K.S Lee, “Analysis and Design of Polysilicon Thermal Flexure Actuator”, J. Micromech. Microeng. Vol. 9, pp. 64-70, 1999
[11]Dooyoung Songcheol, Hong Hah, “A Low-Voltage Actuated Micromachined Microwave Switch Using Torsion Springs and Leverage”, Microwave Theory and Techniques, IEEE Transactions on , Volume: 48 Issue: 12 , Dec. 2000, Page(s): 2540 -2545
[12]J. J. Smegowski, C. Smith, “An Application Of Mechanical Leverage To Microactuation”, Solid-State Sensors and Actuators, 1995 and Eurosensors IX.. Transducers '95. The 8th International Conference on , Volume: 2 Page(s): 364 –36
[13]JDS 尤尼費斯公司, “具有波形樑結構之微機電致動器”, 公告號 0505615, 美國, 2002
[14]JDS 尤尼費斯公司, “同平面微機電結構熱致動器及相關製造方法”. 公告號 0476082, 美國, 2002 [15]柯諾斯積體微系統公司, “多維可伸縮位移致能微電機機械致動器結構及陣列”, 美 5 國, 2002 [16]財團法人工業技術研究院, “電磁式微致動器之製程與結構”, 中華民國, 2001 [17]維克儀器股份有限公司, “高頻寬無反衝力微致動器”, 美國, 2001 [18]德州儀器公司, “微致動器雙讀寫頭位置感測之硬碟機”, 美國, 2000
可供推廣之研發成果資料表
□ 可申請專利 □ 可技術移轉 日期:93 年 9 月 27 日國科會補助計畫
計畫名稱:可變輸出力及位移量微致動器 計畫主持人:黃世疇 教授 計畫編號:NSC 92-2212-E-151-002- 學門領域:自動化元件技術技術/創作名稱
可變輸出力及位移量微致動器發明人/創作人
黃世疇技術說明
在微機電系統裡,微致動器佔有舉足輕重的地位,不同功能的 微系統所需要的致動器也不盡相同,若以驅動方式區分大致可分為 電熱驅動、電磁驅動、靜電驅動、壓電驅動和形狀記憶合金驅動等 方式。雖然驅動方式不同,但它們在設計上,大多被要求達到反應 快、操作容易、能量消耗小等特性。 由於電熱式微致動器具有操作容易、結構簡單、致動力大等特 點,所以在微系統裡是較常被考慮使用的致動方式。但由於電熱式 致動器在高輸出力的特性下,相對的也降低了輸出位移量。所以, 當微系統所需的致動力不大,但對輸出位移量又有某一程度要求 時,此種電熱式微致動器便無法符合要求。 本計畫係設計一可變輸出力及位移量的微致動器,它是利用一 個可調支點位置的微槓桿機構,一端以電熱式 V 型組合懸樑微致 動器作為輸入,此種電熱式致動器具有高輸出力及低位移量的特 性,利用槓桿原理和支點位置的調整,在槓桿另一端即可達成變輸 出力和變位移量的結果。英文﹕Micro actuator plays a dominating role in micro system or micro electro-mechanical system (MEMS). Different types functions of MEMS needs different actuators. There are several types of actuator, such as electro-thermo actuator, electro magnetic actuator, electrostatic actuator, piezoelectricity actuator, and shape memory alloy actuator. Although having different actuation types, the actuators have been asked to design having the characters of rapid response, easy operation, and lower energy consumption.
Due to its easily operating, simple structure and large actuating force, electro-thermo actuator is one of the popular actuation types. However, the character of large output force of electro-thermo actuator has small output displacement. Therefore, this kind of actuator doesn’t meet some micro systems’ demanding of large output displacement and suitable actuating force.
In this project, we try to design an actuator with adjustable output forces and displacements. The proposal design structure is a micro mechanism lever with an adjustable fulcrum. A ‘V’ shape cascaded buckle beam micro actuator is used as an input side. The ‘V’ shape cascaded buckle beam micro actuator with large output force and low displacement. By adjustment of the leverage, we will have different output forces and displacements in another side.