The Hong Kong University of Science and Technology
Department of Civil and Environmental Engineering
Final Report for President's Cup 2013
Project Title: Green Slope Engineering
Team Members
KOW, Hong Yee (CIVL, Year 3)
HO, Chun Pan (CIVL, Year 3)
WANG, Zijian (CIVL, Year 3)
Supervised by:
ProfCharles W.W. Ng April lOth, 2013
ABSTRACT
Green Slope Engineering in Hong Kong is a project, which aims to look into the slope stabilization principles and develop a useful code or guideline for engineers to quantify their designs. Vegetation on slope is widely believed to be beneficial to slope stability via hydrological and mechanical effect. Studies on mechanical effect of vegetation have been widely extended from the idea of green slope. However, hydrological effect of vegetation from the plant-induced suction by transpiration is not well investigated. The project comprehensively considers the effect of climate variation, hydrological behavior and mechanical behavior of plant to the stabilization of vegetated slopes.
The principal objectives of this research were to study the suction distribution and suction response under rainfall in vegetated slopes, as well as investigate the influence of soil matric suction and mechanism of root geometries on root pullout resistance. The objectives were achieved by three means, field monitoring, lab investigation and physical modeling.
Field monitoring was carried out in a re-compacted vegetated slope under different types of vegetated covers. Each vegetated cover is instrumented with tensiometer and heat dissipation sensor for the suction measurement. Also, variation of total evaporation and rainfall are monitored.
Lab investigation was conducted in an atmospheric-controlled room to prevent the suction result to be affected by vigorous atmospheric effect such as humidity and radiation. Non-vegetated soil, or bare soil was prepared as control in the test series.
Physical modeling was performed with root model with controlled geometry. By a series of pullout tests performed with soil matric suction, pullout resistance and displacement of peak force mobilization were measured. They reflect the mechanical reinforcement effect caused by soil matric suction.
Both field monitoring and laboratory work have shown that the vegetated soil can retain soil suction at different sloping angle, hence maintaining the slope stability. Then the results of physical modeling illustrate how soil matric suction enhances the mechanical reinforcement effect of plants. The inner correlation reveals part of the whole stabilization mechanism, providing engineers with more information in doing relevant designs.
TABLE OF CONTENT
ABSTRACT ... 2 TABLE OF FIGURES ... 4 CHAPTER 1: PROJECT OVERVIEW ... 5 1.1 BACKGROUND ... 5 1.2 WTRODUCTION ... 6 1.3 OBJECTIVES ... 7CHAPTER 2 METHODOLOGY ... 8
2.1 INSTRUMENTATION ... 8
2.2 TEST PROCEDURES ... 8
2.1.1Hydrological Part ... 8
2.1.2 Mechanical Part ... 11
CHAPTER 3 RESULTS INTERPRETATION ... 12
3.1 SUCTION EFFECT ... 12
3.1.1 Site monitoring ... 12
3 .1.2 Laboratory Test ... 14
3.2 ROOT REINFORCEMENT EFFECT ... 15
3.3 DISCUSSION ... 16
3.3.1 Suction response under natural variation ... 16
3.3.2 Suction recovery rate increases with vegetation ... 16
3.3.3 Suction retention ... 17
3.3 .4 Correlation to Mechanical Reinforcement ... 17
CHAPTER 4 CONCLUSION ANDENGINEERING POTENTIAL. ... 17
TABLE OF FIGURES
Figure I Project Overview ... 7
Figure 2 Plant species ... 9
Figure 3 Flow of Site Monitoring Plan .................................. 9
Figure 4: General Procedure for Laboratory Test ...... 10
Figure 6: Root Model for Pullout tests ... 11
Figure 5: Atmospheric Controlled Room ... 10
Figure 7 Test Setup ... 11
Figure 8: Suction before and after rainfall after subjected to 34mm rainfall on 30 October, 20I2 .... 13
Figure 9 Suction and Rainfall relationship on O.Im depth during period of II/9/20I2 to 28/2/20I3 .13 Figure 10: Suction Changes in Bare Soil during rainfall for I hour at 30 degree slope ................ 14
Figure II: Suction Recovery in Bare soil at 30 degree slope after rainfall ..... 14
Figure 12: Induced Suction Distribution of Bare, Grass and Tree ................................. 14
Figure 13 Soil Matric Suctions for Pullout Tests ...... 15
Figure I4 Pullout Resistance Curve in Different Soil Moisture Conditions ......................... 15
CHAPTER 1: PROJECT OVERVIEW l.lBACKGROUND
Hong Kong is a well-known hard-hit area of landslides. Because of mountainous terrain, slope failure risks are high and widespread. The rainy weather also makes it a hotbed of landslides. Many Hong Kong roads are built beside steep slopes, causing great hazard to people's property and security.
Comparing with deep-seated landslide, shallow slope failure is a more common threat in Hong Kong. It most likely happens where soil slopes are usually in unsaturated conditions during heavy rainfall in wet seasons (Brand, 1984; Tsaparas et al., 2003; Luino, 2005). According to field observation, the landslides happen in Hong Kong are generally between 0.5m and 2m deep (Dai, 2002). This illustrates the perniciousness of shallow slope failure and the necessity to prevent it in Hong Kong.
The shallow slope failures start with the reduction of soil matric suction caused by rainfall infiltration (N g and Shi, 1998). The reduction of matric suction, one of the stress state variables of unsaturated soil, makes soil lose its shear strength. If the decrease of shear strength continues to one point where it cannot sustain the weight of a certain volume of soil, it slides along the interface called potential failure plane.
The common prevention measures in Hong Kong, including concrete covering and soil nailing,
work by either hydrological or mechanical effect. Hydrological prevention measures, such as concrete covering, protect the slope surface from rainfall infiltration to maintain matric suction. Mechanical prevention measures, such as soil nailing, provide mechanical support along potential failure plane. However, these measures are costly in maintenance and require tree cutting during construction, which is not environmental friendly.
Vegetation has been long observed and considered as an alternative landslide prevention measure.
In the old days, researches focused more on the mechanical effect of plant roots with network geometries (Waldron et al., 1977; Waldron and Dakessian, 1982; Wu, 1988; Operstein and Frydman, 2000; Stokes et al., 2009). After full study of unsaturated soil mechanics, the hydrological effect of plant active water uptake was recognized to be more significant. The suction generated by plant roots is not only helpful in increasing soil shear strength ((Denmead and Shaw, 1962; Feddes et al., 1976; Steudle, 2000; Ng et al., 2012), but also decreasing soil permeability so that rainfall infiltration is mitigated (Ng and Menzies, 2007). Compared with conventional measures, vegetation has many advantages. It is relatively more environmental friendly, elegant in appearance and cheap to be maintained.
It is insufficient knowledge and control ability about the mechanism of vegetation that stops its design and popularity. On one hand, it is a severe conflict that slope stability needs to be improved by soil compaction (Ng and Pang, 2000; Ng and Leung, 2011), while plants prefer
loose soil for growth. On the other hand, the natural randomness of root geometry and complexity of unsaturated soil behavior are still big obstacles to be overcome.
1.2 INTRODUCTION
Green Slope Engineering in Hong Kong is to look into fundamental root-soil-water behaviors and develop a useful guideline for engineers to quantify relative designs. By field monitoring, lab investigation and physical modeling, it comprehensively considers the effect of climate variation, hydrological behavior and mechanical behavior to the vegetation stabilization on slopes.
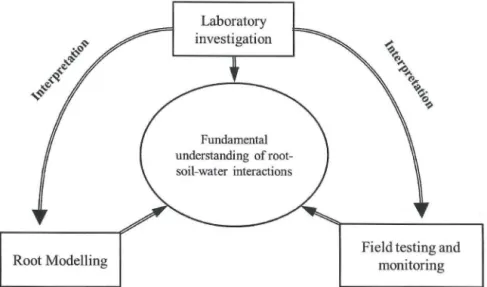
In general, the Green Slope Engineering team is composed by three students. There are three methodologies, as shown in Figure 1.2, were adopted in the project, including lab testing, field monitoring and testing and physical modeling. Each student was in-charge of one specific task based on different research area methodologies and expected to give individual results for different objectives. The results were expected to have inner relation and draw the whole picture of root-soil-water interactions.
Field monitoring was investigating site suction distributions under natural seasonal variations. It was carried out in the site of HKUST Eco-Park built at Lohas Park, with embankment slope vegetated with plants mentioned. Soil and metrological parameters were monitored including suction, rainfall and total evaporation. Through data collection, analysis and comparison with laboratory and physical modeling, suction behavior in site can be understood.
Laboratory tests were further interpreting the suctions in field which has high atmospheric fluctuations. They were carried out in an atmosphere controlled room, studying field data in the lab. With such controlled environment that eliminates the effects from field and atmosphere, the fundamental effect of plants on soil suctions was understood and interpreted more easily.
Physical modeling, or also known as pullout tests, was focusing on how matric suction and root geometries influence mechanical reinforcement effect of plant root. By a series of pullout tests performed with different root geometries and soil matric suction, pullout resistance and displacement of peak force mobilization were measured. By these key parameters of root mechanical reinforcement effect, the influence of soil matric suction and root geometry to root pullout behavior reflects the mechanical reinforcement effect. It indicates that the hydrological effect of plants also improves the mechanical reinforcement of plant roots, and the role of root geometry in mechanical reinforcement is significant.
The three methodologies and their results correlate with each other and interpret the mechanism of root-soil-water interactions. Plant roots suck water and generate soil matric suction, which was observed by field monitoring and lab tests. Soil matric suction enhances slope stability,
which was discussed by physical modeling. Root geometry also directly influences root mechanical reinforcement effect, which was investigated by field monitoring and physical
modeling. Thus, the hydrological effect and mechanical effect of vegetation are displayed as a whole picture in this project.
Root Modelling
1.3 OBJECTIVES
Laboratory
Fundamental understanding of root-soil-water interactions
Figure 1 Project Overview
Field testing and monitoring
The purpose of the project of Green Slope Engineering in Hong Kong is to look into fundamental root-soil-water behaviors and develop a useful guideline for engineers to quantify relative designs. By field monitoring, lab investigation and root modeling, it comprehensively considers the effect of climate variation, hydrological behavior and mechanical behavior to the vegetation stabilization on slopes.
Our specific objectives include:
a) To study suction distribution of three types of vegetated slopes
b) To study the effect of rainfall and evapotranspiration on the suction response under natural and controlled variation
c) To study the effect of sloping angle on its suction distribution under heavy rainfall (Bare, Grass)
Suction during rainfall
Recovery of suctions after rainfall for bare and grass
d) To investigate influence of soil matric suction on root pull-out resistance
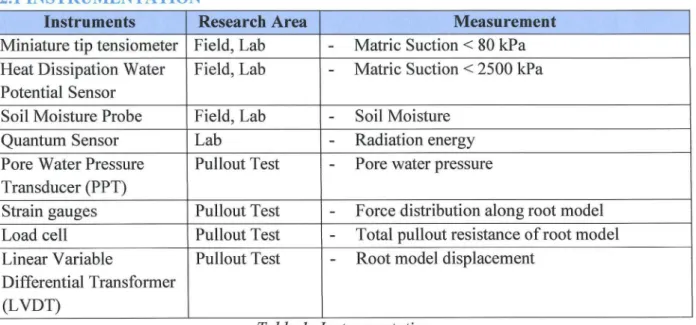
CHAPTER 2 METHODOLOGY 2.1 INSTRUMENTATION
Instruments Research Area Measurement
Miniature tip tensiometer Field, Lab - Matric Suction < 80 kPa
Heat Dissipation Water Field, Lab - Matric Suction < 2500 kPa
Potential Sensor
Soil Moisture Probe Field, Lab - Soil Moisture
Quantum Sensor Lab - Radiation energy
Pore Water Pressure Pullout Test - Pore water pressure
Transducer (PPT)
Strain gauges Pullout Test - Force distribution along root model Load cell Pullout Test - Total pullout resistance of root model
Linear Variable Pullout Test - Root model displacement
Differential Transformer (LVDT)
Table 1: Instrumentation 2.2 TEST PROCEDURES
The hydrological part of the project mainly involves the field investigation and laboratory test. As mentioned in Chapter 1, the field investigation is done in a specific site where the re-compacted slope is constructed. The laboratory work mainly works to support and correlate the data with field monitoring under controlled parameters. Besides, suction behavior understood from site and laboratory enhanced the application level of root reinforcement effect.
In both areas, the same plant species (root modeling in physical testing), soil type and instruments are used, the only difference is site condition and laboratory condition with sufficient control of different parameters.
Soil used in the tests is Complete Decomposed Granite (CDG), which is commonly found in Hong Kong. GEO 2007 states that approximately 90% of the rock in Hong Kong is granite, and due to the weathering of granite, a lot of CDG has been formed. CDG occupies around 80% of developed areas in Hong Kong. At least a 95% Degree of Compaction (D.O.C) of soil has to be attained to achieve a higher shear strength for slope stability in Hong Kong (CEDD, 2006). Therefore, the soil used in the tests is compacted to this level.
2.1.1Hydrological Part
There were two types of vegetation used in this area, consisting of Cynodon Dactylon (grass) and
Schejjlera Heptaphylla (small tree), which are commonly found in Hong Kong and in other parts
of Asia such as Malaysia, India and Vietnam, were used in the test. They are mainly used due to
Cynodon Dactylon, as shown in Figure 2, is also known as Bermuda grass. The blades are a grey-green color and are short, usually 2-15 centimeters long with rough edges. The erect stems can
grow 1-30 centimeters tall. The stems
are slightly flattened, often tinged purple
in color. It has a deep root system; in drought situations with penetrable soil, the root system can grow to over 2 m
deep, though most of the root mass IS
less than 60 em under the surface.
Bare ground covered with sheet measurement (5mm/day) Weighing _ _... -balance
Figure 2 Plant species
dactyl on (Grass)
Schefflera Heptaphylla, as shown in Figure 2, is also known as Ivy tree. A small to medium-sized, semi-deciduous or evergreen tree up to 25 m tall, root lateral diameter of up to 80 em in diameter.
2.1.1.1 Field Investigation
Site of the project is located in the south part of HKUST Eco-park. To investigate and improve
the fundamental understanding of root-soil-water interactions, a compacted embankment was formed to develop a practical and environmentally friendly reliability-based preliminary design framework for "integrated bioengineering live slope cover" for shallow soil slopes in Hong Kong. The compacted embankment is formed as a trapezoidal sloping ground by completely decomposed granite (CDG) with 95% degree of compaction. The dimensions are 30m x 18m x
2m. The volume used for the embankment is 540 m3. The study was obtained on 33° slope
located at the north part of the embankment.
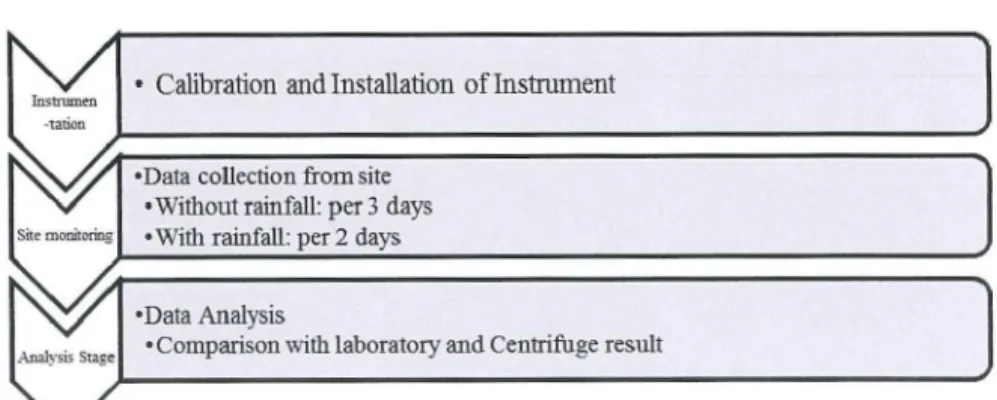
Site Monitoring Plan
• Calibration and Installation of Instrument
• Data collection from site • Without rainfall: per 3 days • With rainfall: per 2 days
• Data Analysis
• Comparison with laboratory and Centrifuge result
Before site monitoring, installation of instrument was carried with proper calibration to ensure a high quality of instrument and accuracy. Collection of data included suction in different cover and depth, rainfall and total evaporation. After instrumentation, site monitoring with data collection from site was implemented per 3 days without rainfall and 2 days with rainfall. Data collected from site was analyzed and compared with the laboratory and centrifuge result. Therefore, a deeper understanding of suction induced behavior from vegetation can be achieved. The flow of site monitoring plan is shown on Figure 3.
2.1.1.2 Laboratory Test
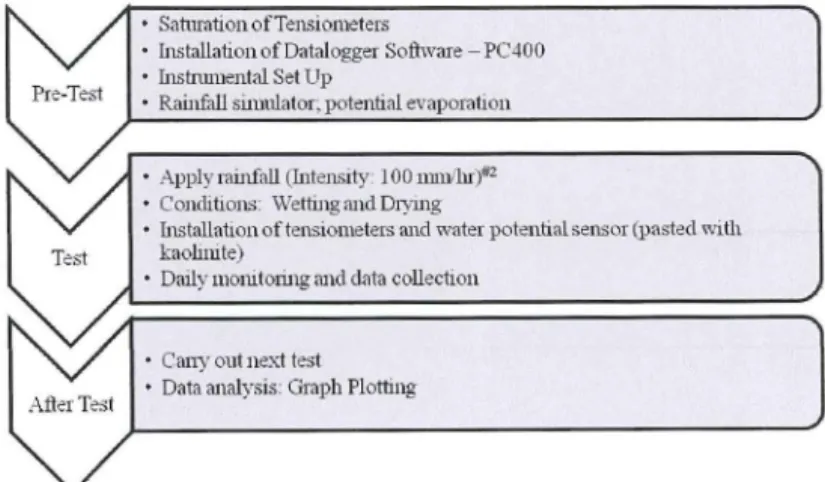
In general, the experimental procedure for the project is categorized into three sections,
consisting of Pre-test, Test and After Test. The flow chart can be seen in Figure 4. Before the test begun, the soil moisture probe (Tensiometer) was saturated to remove air retained in the wall of ceramic cup, and this is important to ensure accurate measurement. Also, Datalogger Software-PC 400, all instrumentation and rainfall simulator must be installed and ready for the specific test series. For instance, the initial room condition must be assured as this will affect the induced suction in the experiment.
• Satnration ofTensiometers
• [m;tallationofDatalogger Software-PC400
• lru;tnunental Set Up
• Rainfall simulator; potential evaporation
• Apply rainfall (Intensity: I 00 nunfhr)#2
• Conclitiom: WettingandDry:ing
• [nstallation of tensiometers mld water potential sensor (pasted with
kaolinite)
• Daily monitoring and data collection
• Cany out next test
• Data analysis: Graph Plotting
Figure 4: General Procedure for Laboratory Test
The saturated tensiometers were installed at different depth of the test box - 40mm, 80mm, 140mm and 210 mm respectively. Test boxes were exposed to the environment and suction would be observed before conducting any experiment. Once the initial suction had reached around 50~60 kPa, rainfall of intensity
100 mm/hr was applied on the plants. Next, readings were taken during rainfall. Daily monitoring, data
collection and data analyses were also conducted
2.1.2 Mechanical Part 2.1.2.1 Pullout Test SGI SGZ SGJ SG4 SGS
Figure 6: Root Model for Pullout tests
Root Models for pull out tests were made of Viton Rubber tubes with outer diameter of 19mm
and inner diameter of 13mm. It was 300mm long, with strain gauges installed at positions shown
in Figure 6.Strain gauges are sensors measuring material strain or bending moment. In order to
get the result, four strain gauges were installed around the same location.
In order to prevent the damage of strain gauges during the test and simulate real root surface, the
main root and branches was cover by 1 mm thick silicon grease. It effectively protected strain
gauge from shearing as well as potential damage of water and ensured the stability of strain
gauge results.
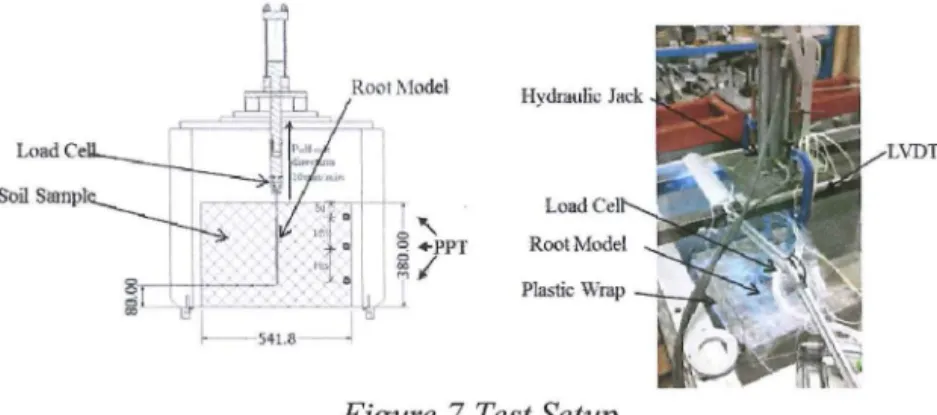
Figure 7 Test Setup
An aluminum box with a dimension of 541.8x541.8x380 mm was placed in a big testing box.
The hydraulic jack was installed on two metal bars fixed on the sides of testing box. The root
model was connected to the end of hydraulic jack by a metal clamp. A load cell was placed
above the clamp to measure the whole pullout resistance of root model. The L VDT was at the
back of hydraulic jack, which measured the displacement of hydraulic end instantaneously. The
signal wires of LVDT, Load cell and strain gauges on root model were connected to the server
beside the testing box, which record the data throughout the testing process. Three PPTs were
Soil was compacted with root model vertically buried. After two-day equilibrium, the values of
PPTs were recorded for soil matric suction. The server was turned on, measuring the values of
L VDT, load cell and stain gauges. The valve of oil supplier was opened to supply oil to the
hydraulic jack. Hydraulic jack started to pull out the root model in a constant speed no more than
10 mm/min. The slow speed ensured that the process was in drained conditions, and dynamic
effects were minimized. The tests continued until root model was fully pulled out. The values of LVDT, load cell and strain gauges were recorded and memorized by the server instantaneously. These data recorded was to be analyzed as test results.
CHAPTER 3 RESULTS INTERPRETATION
3.1SUCTION EFFECT
Suction creates a good influence on slope stability with hydrological and mechanical effects. Due
to limitation of pages, only significant results are described. 3.1.1 Site monitoring
3.1.1.1 Suction response under natural variation
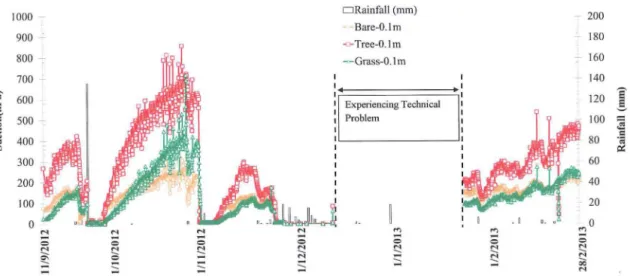
On 30 October, 2012, slope subjected to 34mm rainfall. From Figure 9, there is a rapid decrease in suction. After significant rainfall, suction started to recover to a higher value until occurrence of rainfall. Similar circle of wetting and drying process often occur in monitoring period which wetting process will decrease suction and hence, induce slope instability.
3.1.1.2 Suction recovery rate increases with vegetation
From Figure 8, at O.lm depth, the suction recovery rate is obviously the highest in tree and followed by grass and bare. Vegetation obviously increases suction recovery rate.
The reason is vegetation helps to uptake water from soil by its root system (transpiration process) which added one more source of soil water outflow. Therefore, the vegetation helps to increase suction recovery rate after rainfall. Besides, there is also the reason that tree has a higher suction recovery rate than grass is, tree has comparatively high of plant height which induced a higher water potential difference in plant structure. Therefore, tree is more capable to uptake water from soil.
3.1.1.3 Suction retention
On 30 October, 2012, slope subjected to 34mm rainfall. From Figure 8 and Table 2, at 0.3m depth which is generally shallow failure zone, the suction retention of bare, grass and tree are 6.5, 5 (by interpolation) and 54.5 respectively. Tree has obvious retention of suction after rainfall.
The reason is, in 0.3m depth, it is within the root zone of tree and thus, significant transpiration
effect occurred and retained a high value of suction. However, 0.3m depth is out of effective root
0 0 0.1 fll -,' I \ -I ' 0.2
~
;: 0.3 Q..""
Ci 0.4 0.5 0.6 100 ' \ ' 200 Suctioo(kPa) 300Depth of Tree root
400 500 GOO
Depth of Grass root
-...-smoe-~~28+2-- · Bare-31 Oct 2012 _ ,.._Trcc-28 Oct 2012 -n-Tree-31 Oct 2012 ... Grass-28 Oct2012 -.r Grass-31 Oct 2012
Figure 8: Suction before and after rainfall after subjected to 34mm rainfall on 30 October, 2012
Cover- 0.3m depth Maximum Suction before rainfall Minimum Suction after rainfall
(kPa) (kPa)
28-10-2012 to 31-10-2012 (Winter) (Subjected to 34mm rainfall)
Bare 136.4 6.5
Grass 125 (by interpolation) 5 (by interpolation)
Tree 133 54.5
Table 2 Maximum Suction before rainfall and Minimum Suction after rainfall after subjected to
34mm rainfall on 30 October, 2012
'"
~=
0 .::: "' ="'
1000 -900 .::. 800 -c: 600 300 200 100 0 ::! 0 ... ~ -::!-
...=
0 N ~ :;-
-DRainfall (mm) -Bare-O.Im -o-Tree-0.1 m --Grass-O. I m Experiencing Technical Problem - 200 - 180 - 160 - 140 120e
s
3 c 80 ·;; IX 60 20 • D ....,o ...., 0 0 ~ ~ ~ ~ QO N3.1.2 Laboratory Test
3.1.2.1 Suction response under natural variation
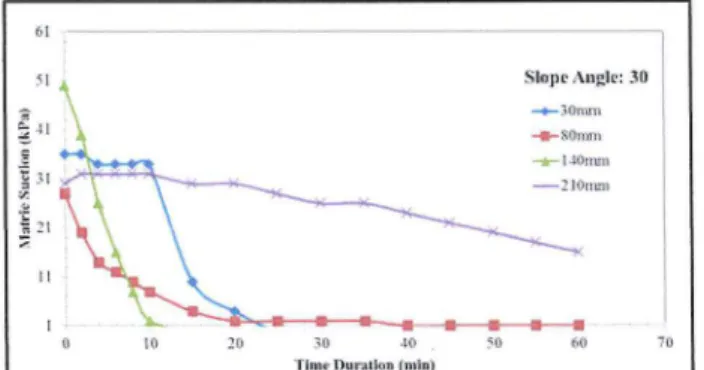
Under 100 mm rainfall for 1 hour, from Figure 10, suction obviously decreases with time and
after rainfall, from Figure 11, suction increases with time. This gives a good conversation with
the site result.
61 )I , ~-II II 40 TimE> Ou•·tulon ·(m1n) -+-30mm ... sonun ...-1-IOm.m - 2J0mon 60 70
Figure IO: Suction Changes in Bare Soil during rainfall for I hour at 30 degree slope
70 ~---, ~ 60 ci: :! 50 ~ 40 'ti ~ 30 " ~ 20 :;;: 10 15 Time (Day) -t-30nun ... sornm ....-J40mm - 210mm
Figure II: Suction Recovery in Bare soil at 30 degree slope after rainfall
3.1.2.2 Suction recovery rate increases with vegetation
From Figure 12, rate of inducing suction is the highest in Tree, followed by Grass and Bare
which also makes a good conservation with site result.
80 .-.. 60
"'
0.. ~.
9
40 t5 ;::l f/) .:2 20 t: "' ~ 0 0 5 10 Time {day) 15 ... Bare_JOmm ... · ... Barc_140mm ..._.Trec_30mm ..._.Gr<lss_3Dmm - -Tree_J40mm - Gras.s_l40mm3.2 ROOT REINFORCEMENT EFFECT 0 50 100 ,..._
=
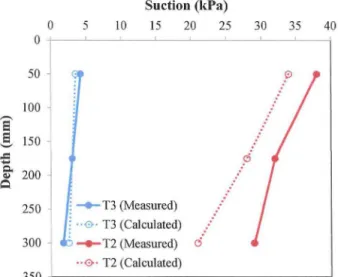
6 150 ' - ' ..= .... Q. 200 <II Q 250 300 0 Suction (kPa) 5 10 15 20 25 30 35 40 - -T3 (Measured) ··0· T3 (Calculated) - -T2 (Measured) ··0· T2 (Calculated)/./
.../
(). $il 350L---~Figure 13 Soil Matric Suctions for Pullout Tests
The suctions measured for all pullout tests are shown in Figure 13. T2 and T3 mean Test 2 in 12% water content soil and Test 3 in 20% water content soil respectively. The matric suction in Test 1 (dry soil) is approaching infinity and meaningless for measurement.
300 - 20%GWC 250 - 12%GWC -200 ~ - O%GWC ~ c:.; 150
..
..s
-
=
0 100 I--
~=
50 0 150 200 250 300 3 0 -50 Displacement (mm)Figure 14 Pullout Resistance Curve in Different Soil Moisture Conditions
The curves of pullout resistance of tap root models versus pullout displacement are shown in
In term of peak pullout resistance values, relatively dry soil (12%) provide pull-out resistance more than moist soil (20%) almost 300% as an effect of soil suction, while dry soil (0%) provide less resistance but still more than moist soil by about 70%.
Mobilised axial force (N)
0 50 100 150 200 250 300 -50 0 50 100 150 200 250 300 0 50 100 150 200 250 300 () 0 -50 50 - 50
-]oo
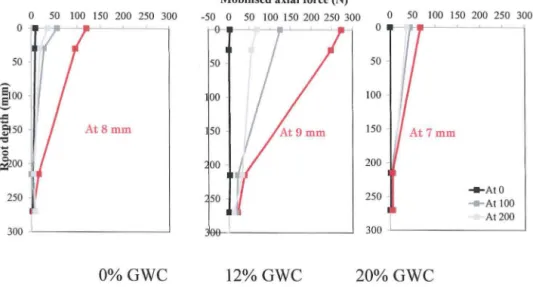
100 - 100 -..c ~50 At8mm 50 150 -"0 .... 0 ~00 200 -250 - ---AtO - -At 100 At200 300 300 O%GWC 12%GWC 20%GWCFigure 15 Mobilized Axial Force at Different Depths for Tap Root Tests
The mobilized axial forces were measured by the strain gauges installed at different depths. The forces are mobilized at similar displacements, about 6, 7 and 9mm for 20%,0% and 12% water content soil, respectively. Strictly speaking, root displaced farther to reach peak pullout resistance, or be fully mobilized, in 12% water content soil.
According to Figure 15, the slope of curve at bottom 85mm is smaller than that on the top. It indicated that the bonding of root and soil at root bottom was weaker than other positions.
Mobilized forces are reduced substantially after reaching peak for 12% water content soil but still well maintain above a half of peak resistance for 20% water content soil.
3.3 DISCUSSION
3.3.1 Suction response under natural variation
Suction decreases with rainfall because of water infiltration and recovers after rainfall with water
outtake by natural evaporation and transpiration.
3.3.2 Suction recovery rate increases with vegetation
3.3.3 Suction retention
Suction retained of tree vegetated cover on site after 34mm rainfall is 54.5kPa which helps to increases shear strength of soil and also creates beneficial effect on plant root pull out resistance.
Therefore, tree cover is recommendedas the vegetation on slope. 3.3.4 Correlation to Mechanical Reinforcement
Root in relatively dry CDG (about 12% water content) with matric suction between 30 to 40 kPa has highest pullout resistance among three cases. When soil matric suction decreases to about 3kPa, root pullout resistance is the lowest. However, if soil matric suction is approaching infinity (0% water content), root pullout resistance is between the previous two cases.
Correlated to the suction retention value of 54.4kPa, the previous statement implies that plant root has higher pullout resistance in suction retention condition generated by vegetation than that in saturated condition caused by infiltration without vegetation protection.The mechanical reinforcement effect of plants is strengthened by the matric suction retention generated by their own during rainfall.
CHAPTER 4 CONCLUSION ANDENGINEERING POTENTIAL
Bio-engineered (Green Slope) is definitely a new development in engineering field in the future. In Hong Kong, almost 5,000 man-made fill slopes require stability and restoration. However,
only around 300 slopes can be restored by GEO each year. Through green slope technique, vegetation will be transplanted on the slope. As discussed in Chapter 3, vegetated slope is able to retain high suction even during rainfall with high intensity. Hence, this helps to enhance the slope stability and in long term basis, this is almost maintenance free.
Also, this new technique is expected to be developed and replace the existing shortcrete cover which is not environmental friendly. The vegetated slope is self-generative and comparably more sustainable than the current technique. Lastly, this idea can widely be implemented in the Asian countries, especially South East Asia (ASEAN) as the plant species used in the research are commonly found in the region.
REFERENCE
Brand, E. W., Premchitt, J., and Phillipson, H. B. (1984).Relationship between rainfall and landslides.In Proceedings of the 4th International Symposium on Landlides, Toronto, Ont., 16 -21 Sept, l984.BiTech Publishers, Vancouver, B. C., Vol. 1, 377-384.
Dai, F.C and Lee, C.F. (2002). Landslide characteristics and slope instability modeling usingGIS,
Lantau Island, Hong Kong. Geomorphology 42 (2002) 213-228
Denmead, 0. T., and Shaw, R. H. (1962).Availability of soil-water to plants as affected by soil moisture content and meteorological conditions. Agronomy J., 54, 385-390.
Feddes, R. A., Kowalik, P., Kolinska-Malinka, K., and Zaradny, H. (1976).Simulation of field water uptake by plants using a soil water dependent root extraction function. Journal of Hydrology, 31(1), 13-26.
Luino, F. (2005).Sequence of instability processes triggered by heavy rainfall in the northern Italy. Geomorphology, 66(1), 13-39.
Ng, C. W. W., and Leung, A. K. (2011).Measurements of Drying and Wetting Permeability Functions Using a New Stress-Controllable Soil Column. Journal of Geotechnical and Geoenvironmental Engineering, 138(1), 58-68.
Ng, C. W. W., and Menzies, B. (2007). Advanced Unsaturated Soil Mechanics and Engineering. Taylor and Francis, USA.ISBN978-0-415-43679-3.
Ng, C. W. W., and Pang, Y. W. (2000). Experimental investigations of the soil-water characteristics of a volcanic soil. Canadian Geotechnical Journal, 37(6), 1252-1264.
Ng, C.W.W., and Leung, A.K. (2012).Measurements of Drying and Wetting Permeability
Functions Using a New Stress-Controllable Soil Column.Journal of the Geotechnical and Geoenvironmental Engineering.58-68.
Ng, C.W.W., and Shi Q. (1998). A numerical investigation of the stability of unsaturated soil slopes subjected to transient seepage. Computers and Geotechnics, 22(1), 1-28
Operstein, V., and Frydman, S. (2000). The influence ofvegetation on soil strength. Proceedings ofthe ICE-Ground Improvement, 4(2), 81-89.
Steudle, E. (2000). Water uptake by roots effects of water deficit. Journal of Experimental Botany, 51(350), 1531-1542.
Stokes, A., Atger, C., Bengough, A. G., Fourcaud, T., and Sidle, R. C. (2009). Desirable plant root traits for protecting natural and engineered slopes against landslides. Plant and soil, 324(1), 1-30.
Tsaparas, I., Rahardjo, H., Toll. D. G., and Leong, E. C. (2003). Infiltration characteristics of two instrumented residual soil slopes. Canadian Geotechnical Journal, 40, 1012- 1032.
Waldron, L. J. (1977). The shear resistance of root-permeated homogeneous and stratified soil. Soil Science Society of America Journal, 41(5), 843-849.
Waldron, L. J., and Dakessian, S. (1982). Effect of grass, legume, and tree roots on soil shearing resistance. Soil Science Society of America Journal, 46(5), 894-899.
Wu, Tien H., Fellow, ASCE, Ronald M. McOmber, Ronald T. Erb, Member, ASCE, and Philip E. Beal (1988). Study of Soil-root Interaction. Journal of Geotechnical Engineering, 114(12),