應用空載光達資料估計森林樹冠高度模型及葉面積指數
79
0
0
全文
(2)
(3) 摘要 台灣的森林占了本島一半以上的土地面積,其中蘊藏了豐富的生物資源,為了能 有效的進行林分結構的量測來掌控森林生態系的變化,利用航遙測技術來獲取大範圍 的森林資訊為目前的主要的趨勢。空載光達系統具有直接獲取高精度三維坐標的點雲 以及部分穿透的特性,應用在森林中可達到快速量測林分結構的三維空間資訊,能得 到在垂直方向的冠層高度以及樹冠密度變化,因此可用來估計樹冠高度模型(Canopy Height Model, CHM)和葉面積指數(Leaf Area Index, LAI)。因此,本研究主要目的是探 討如何應用空載光達資料估計森林地區之樹冠高度模型和葉面積指數。 應用空載光達資料產製數值高程模型(Digital Elevation Model, DEM)及數值表面 模型(Digital Surface Model, DSM)是目前成熟的空載光達資料處理程序,將 DSM 減 DEM 即可獲得 CHM。而 LAI 的估計則透過雷射光(對樹冠層的)穿透率(LPI)之估算來 推估,本研究採用五種 LPI 計算方法來估計 LAI,並將成果與現地觀測得的資料進行 迴歸分析,以驗證實驗成果。實驗區位在台灣東南部森林區範圍,採用三種全波形空 載光達系統所得到的多重回波點雲和全波形點雲,共六種不同組合的點雲資料,分別 進行樹冠高度模型和葉面積指數的估計,並進行成果之比較。其中,全波形點雲是利 用小波為基礎的萃取方式,從光達儀器記錄的連續反射波形資訊中獲取而得,主要是 希望透過波形中隱含的物理特性,萃取出較完整的點雲來代表森林結構。 經由研究成果發現,利用六種點雲資料在製作森林樹冠高度模型中最大的標準偏 差約在 1.5 公尺左右,主要是在森林表面高度落差較大的地方有明顯的差異。而在葉 面積指數估計方面,是利用離散的點雲計算出五種穿透率指標 : (1)地面點占全部點 的比例; (2)地面點強度值和全部點強度值的比例;(3)地面點與所有雷射光束的比值; (4)改良自(1)的穿透率指標,增加對單一回波地面點的加權;(5)以全波形資料計算的 雷射光照射地物間面積與非地面的面積比。再將各種穿透率指標,與使用 LAI-2000 於現地測得的葉面積指數進行迴歸比較。實驗成果顯示,使用經改良後的第四種穿透 率指標對於葉面積指數有最佳的解釋能力。而相較於即時解算的多重回波點雲,使用 全波形的光達點雲穿透率指標,可提升對 LAI 的估計,R2 達到 0.8 以上。 關鍵詞:樹冠高度模型,葉面積指數,空載光達,雷射穿透率,全波型. I.
(4) Abstract Efficiently obtaining the information in forest region such as forest structure, forest ecosystems is important for forestry management. Remote sensing has been considered as a. practical technology to acquire the data of a large area. Compared with spectral images, airborne light detection and ranging (LiDAR) can provide three dimensional coordinates directly, and the penetration characteristics of LiDAR system makes the possibility of seeing through the canopy. Therefore, the structure or the terrain under the canopy can be characterized by the LiDAR point cloud data.. The purpose of this study is to estimate the Canopy Height Model (CHM) and the Leave Area Index (LAI) of a dense forest area by using airborne LiDAR data. CHM is estimated by taking the difference of DSM and DEM derived from LiDAR data. Estimation of LAI is achieved based on the calculation of Laser Penetration Index (LPI). Five calculations of LPI were applied in this paper: (1.) The ratio between the number of ground points and that of all the points; (2.) the ratio between the intensities of ground points and that of all the points; (3) the ratio between the number of ground points and the number of laser beams; (4) a weighting method modified from index (1); and (5) the ratio between the area of ground points and that of all the points. The study area is in a nature broadleaf forest of south Taiwan. In this study, we use three sets of airborne LiDAR data acquired with different full waveform LiDAR systems including Leica ALS60, Riegl LMS-Q680i and Optech Pegasus HD400. All of these LiDAR systems are capable of recording full waveform data, then we can get the waveform point clouds by the echo detector to do the comparison. Our experiments results show that the accuracy of CHM by different LiDAR data is about 1.5 meter. And the fourth LPI index has the highest coefficient of determination (about 0.8) and the estimation of LAI can be improved by using the waveform points.. Keywords:Canopy Height Model (CHM), Leaf Area Index (LAI), Airborne LiDAR, Laser Penetration Index (LPI), Waveform. II.
(5) 致謝 即將離開生活六年的台南,很開心能在這個熱情的城市認識了許多的人,擁有許 多珍貴的回憶。而在最後這兩年的研究生活雖然常常遇到許多不同的困難,但也學習 了如何以不同角度去看問題,進而想辦法解決的能力。很感謝研究室的夥伴、學長學 弟妹們互相的支持,和所有曾經幫助過我、提供意見和鼓勵我的人。當然,還有研究 生活中難忘的外業,真的非常感謝陪我上山的各位,沒有你們的幫助就無法順利完成 這個研究。 感謝曾義星老師在兩年指導,在研究中遇到瓶頸時給予方向,以及口試委員陳朝 圳老師、徐百輝老師及朱宏杰老師給予的寶貴建議,也特別謝謝正楷學長、崇誠學長 在研究上的幫助!也要謝謝屏東科技大學森林系不厭其煩的提供 LAI-2000 儀器供我 們研究使用。最後要謝謝總是很貼心給予關心的怡萱學姊、一直陪伴和支持我的你和 家人,讓我能無後顧之憂完成學業,希望在人生下個階段都能勇敢的面對各種挑戰, 繼續向前邁進。. III.
(6) 目錄 摘要..............................................................................................................................I Abstract ...................................................................................................................... II 致謝........................................................................................................................... III 目錄........................................................................................................................... IV 表目錄....................................................................................................................... VI 圖目錄..................................................................................................................... VII 第一章 緒論............................................................................................................... 1 1.1 前言 ............................................................................................................... 1 1.2 研究動機與目的 ........................................................................................... 2 1.3 研究方法與流程 ........................................................................................... 4 1.4 論文架構 ....................................................................................................... 5 第二章 森林樹冠高度模型及葉面積指數 .............................................................. 7 2.1. 樹冠高度模型(CHM) .............................................................................. 7. 2.2. 葉面積指數(LAI) ..................................................................................... 8 2.2.1 定義及意義 .................................................................................................. 8 2.2.2. LAI 估計方法 ....................................................................................... 9. 第三章 空載光達系統............................................................................................. 14 3.1. 系統原理 ................................................................................................ 14. 3.2. 光達點雲資料性質 ................................................................................ 15. 3.3. 全波形光達系統 .................................................................................... 16. 3.4. 3.3.1. 全波形資料性質 ................................................................................. 16. 3.3.2. 全波形響應偵測 ................................................................................. 17. 3.3.3. 全波形點雲 ......................................................................................... 18. 光達點雲資料處理 ................................................................................ 19 3.4.1. 數值高程模型(DEM) ......................................................................... 20 IV.
(7) 3.4.2. 數值表面模型(DSM).......................................................................... 21. 3.4.3. 點雲穿透率 ......................................................................................... 22. 第四章 樹冠高度模型和葉面積指數的估計 ........................................................ 23 4.1. 樹冠高度模型估計 ................................................................................ 23. 4.2. 葉面積指數估計 .................................................................................... 25 4.2.1 計算穿透率指標 ........................................................................................ 26 4.2.2 尋找最適合計算範圍 ................................................................................ 28 4.2.3 葉面積指數的迴歸模式和評估方式 ........................................................ 29. 第五章 實驗成果與分析 ........................................................................................ 31 5.1 實驗資料 ..................................................................................................... 31 5.1.1 實驗區域 .................................................................................................... 31 5.1.2 光達資料 .................................................................................................... 32 5.1.3 現地觀測資料 ............................................................................................ 34. 5.2 樹冠高度模型成果分析 ............................................................................. 35 5.2.1 單一光達資料之分析 ................................................................................ 36 5.2.2 多種光達資料之分析 ................................................................................ 40. 5.3 葉面積指數估計成果分析 ......................................................................... 44 第六章 結論及建議................................................................................................. 52 參考文獻................................................................................................................... 54 附錄........................................................................................................................... 57 附錄一 空載光達點雲製作的 DEM、DEM、CHM ....................................... 57 附錄二 空載光達穿透率指標推估葉面積的直線迴歸模式 ........................... 64. V.
(8) 表目錄 表 1-1 台灣全島森林面積統計表 (林務局,1995) ............................................... 1 表 5-1 光達系統掃描參數 ...................................................................................... 33 表 5-2. A 區光達點雲的詳細資料 ........................................................................ 34. 表 5-3. B 區光達點雲的詳細資料 ........................................................................ 34. 表 5-4 CHM 用於樹體積之推估 .......................................................................... 42 表 5-5. A 樣本區的數值模型成果統計表 ............................................................ 43. 表 5-6. B 樣本區的數值模型成果統計表 ............................................................ 44. 表 5-7. 單一回波 intensity 統計平均值 ................................................................ 45. 表 5-8. 穿透率指標與葉面積指數的相關性判定係數 R2 ................................... 47. 表 5-9. 各 LPI 推估 LAI 之估計方程式 ............................................................... 49. 表 5-10 利用 LPI4 得到整區葉面積指數估計之比較 ........................................... 51. VI.
(9) 圖目錄 圖 1-1 全國森林分佈圖. (a)國有林地樹冠密度級分佈圖 (b)森林地海拔高分. 級圖 (林務局,1995)............................................................................................. 2 圖 1-2. 本研究流程圖 .............................................................................................. 5. 圖 2-1 森林分層示意圖 ............................................................................................ 8 圖 2-2 (a)數值表面模型(b)數值高程模型(c)樹冠高度模型( Kellner, 2009) .......... 8 圖 2-3 LAI-2000 植冠分析儀(LI-COR, 1990) ..................................................... 11 圖 2-4 裸露地、植物和水的典型光譜反射率曲線圖(Lillesand et al.,1987)...... 12 圖 2-5 NDVI 與 LAI 之間的關係圖(Vargas et al., 2002) ..................................... 12 圖 3-1 空載光達系統示意圖(Leica GeoSystems, 2004) ........................................ 15 圖 3-2 光達點雲在森林分布之剖面圖:灰色點為單一回波值;綠色點為多重 回波的第一回波訊號;紅色點為多重回波的中間回訊;橘色點為最後一個 回波值 ................................................................................................................... 16 圖 3-3. 全波形光達與一般光達在穿透樹林之示意圖(Diaz, 2011) .................... 17. 圖 3-4 光達產生(a)弱回訊或(b)重疊回波的現象(Wang, 2012) ........................... 18 圖 3-6 全波形和傳統光達點雲示意圖 ................................................................... 19 圖 3-7 光達點雲分類示意圖 (白色點為非地面_樹木或建物等;橘色點為地 面;桃色點為錯誤點) .......................................................................................... 20 圖 3-8 數值高程模型(DEM)製作流程.................................................................... 21 圖 4-1 利用空載光達點雲製作樹冠高程模型示意圖 (a)數值高程模型(DEM) (b)數值表面模型(DSM) (c)樹冠高度模型(CHM) ........................................... 24 圖 4-2 製作樹冠高程模型流程圖 .......................................................................... 24 圖 4-3 利用光達點雲推估葉面積指數流程圖 ...................................................... 26 圖 4-4 光達穿透率指標計算範圍(a)側視示意圖(b)俯視示意圖 ......................... 29 VII.
(10) 圖 5-1. 樣區範圍圖 ................................................................................................ 32. 圖 5-2. 現地定位測量 ............................................................................................ 35. 圖 5-3 LAI-2000 測量方式之俯視圖 ................................................................... 35 圖 5-4 利用 Leica 資料分別在兩個區域製作 DSM、DEM 及 CHM 之成果 .... 37 圖 5-5 Leica 系統中的 (a) 一般光達地面點;(b)全波形光達地面點分佈圖 . 37 圖 5-6 DEM 差異之比較圖:(a)DEM 差值圖;(b) DEM 差值統計直方圖;(c) 及(d)為圈選處放大圖及剖面圖........................................................................... 38 圖 5-7 DSM 差異之比較圖:(a)DSM 差值圖;(b)DSM 差值統計直方圖; (c) 為圈選處之放大圖及剖面圖 ............................................................................... 39 圖 5-8 CHM 差異之比較圖:(a) CHM 差值圖;(b) CHM 差值統計直方圖 .. 40 圖 5-9 CHM 網格點的平均值(a)(b)及標準偏差(c)(d)的分佈圖(單位:公尺) .... 41 圖 5-10 六種點雲資料產製之 CHM 標準偏差統計直方圖 ................................. 41 圖 5-11. CHM 高度統計直方圖 ............................................................................ 42. 圖 5-12 前處理後的點雲 (橘色點為原分纇的地面點;白色點為非地面點;綠 色點為經 1 公尺門檻後增加的地面點) .............................................................. 44 圖 5-13 單一回波地面點和非地面點之分佈(橫軸為強度值;縱軸為累計量) . 46 圖 5-14 葉面積指數和各種穿透率指標在不同範圍下的相關性判定係數(R2) . 47 圖 5-15. LPI4 與現地觀測葉面積指數的直線迴歸模式 ...................................... 48. 圖 5-16 葉面積指數和各種穿透率指標在不同範圍下的相關性判定係數(R2) . 49 圖 5-17 利用整區葉面積指數的計算成果圖(a)測區正射影像;(b) Leica 多重回 波;(c) Leica 全波形;(d) Riegl 多重回波;(e) Riegl 全波形 .................................. 50 圖 5-18 四種不同點雲資料得到的葉面積指數估計之標準偏差分佈圖 ............ 51 圖 5-19 (a)Leica 和(b)Riegl 光達系統在圖 5-18 圈選處的點雲的剖面圖 ........ 51. VIII.
(11) 第一章 緒論 1.1 前言 台灣是一個面積狹小的島嶼,位處熱帶和亞熱帶間,氣候溫暖且潮濕,加上介於 板塊交界處,因板塊的擠壓造就劇烈的地形起伏變化,使得台灣具有複雜的自然環境, 蘊藏極豐富的生態資源。而森林是台灣陸地最大的生態體系,根據民國 84 年完成的 第三次台灣森林資源及土地利用調查資料,可得知台灣全島森林面積統計如表 1-1, 森林地總共約占了 59%的總土地面積,其中又以闊葉樹林面積 1,120,400 公頃為最多, 約占全島面積的 31% (林務局,1995)。而森林是維護生物多樣性環境不可或缺的重要 角色,也是大自然中關鍵的資源庫。透過森林中大量的植物能做為空氣的淨化物,並 透過光合作用提供地球上生物氧氣,吸收二氧化碳減緩地球暖化的速度。除此之外也 提供了許多生物的生長環境,創造出地球多樣化的樣貌。因此要如何在不破壞生態環 境下,應用遙測科技有效監測大範圍森林的生態指標為一個重要的課題。 表 1-1 台灣全島森林面積統計表 (林務局,1995) 森 林 種 類 面積(公頃) 佔全島百分率(﹪) 森林地. 2,102,400. 58.53. 針葉樹林. 438,500. 12.21. 針闊混淆林. 391,200. 10.89. 闊葉樹林. 1,120,400. 31.19. 竹林. 152,300. 4.24. 非森林地. 1,489,100. 41.47. 全 島 合 計. 3,591,500. 100. 為了能了解森林資源的現況,現型林木調查方式大多使用現地調查搭配人工航測 立體像對量測及遙測影像分析來得到。透過航遙測影像的技術,可以快速得到大範圍 面積的資訊,並利用影像匹配的方式產生數值表面模型,從地物覆蓋的情形去了解森 林大略的分佈。再以數值表面模型為依據設立地面樣本區,透過人員進入現地調查、. 1.
(12) 取樣,得到森林內部的資訊如樹種、樹高、材積、葉面積指數等。目前我國進行的森 林資源調查,即是大量應用數值航照影像,搭配現地調查進行數化來建製全國土地覆 蓋型的三維圖資例如林地樹冠密度圖、森林地海拔高分級圖,全國森林分佈圖如圖 11 (林務局,1995)。但由於遙測影像在大範圍的茂密森林區難以量測匹配點,提供的 高程精度易受限於影像的品質,且無法獲得樹冠下地表的資訊,因此必須花費大量的 人力與時間進行現地的調查。 隨著航遙測技術的發展,透過空載光達系統可以直接獲取地物的三維的點雲,並 且能包含森林樹冠下地物的反射。將空載光達資料應用於森林的探測,能夠得到豐富 的三維空間分佈資訊,提高在森林調查上高程之精度,增加量測時的效率。 (a). (b). 圖 1-1 全國森林分佈圖 (a)國有林地樹冠密度級分佈圖 (b)森林地海拔高分級圖 (林務局,1995). 1.2 研究動機與目的 森林中的資訊包含了林分高度、林木材積、葉面積指數、樹種等等,不同的指標 都代表著森林生長的情形。因此利用探測森林的各種參數指標,以利我們了解在整個. 2.
(13) 森林環境的變化。為了能達到快速且能長期監控森林生長的目的,目前除了現地量測 的方式,也越來越多的研究利用航遙測的技術進行森林的量測 (吳守從及陳永寬, 2004) 。由於空載光達有直接提供三維資訊上的優勢,發展出各種方式來探測森林生 長,像是偵測立木位置、林木高度、分辨樹種、生物量及葉面積指數等(Koetz et al., 2006)。 樹冠高度模型中包含了森林的高度,以及整體的森林體積、範圍等,必須透過量 測樹冠表層及地面的三維資訊才能得到。對於空載光達系統而言,可利用高密度的掃 描方式來快速獲取這些地物的坐標,以得到樹冠高度模型。但由於光達系統所獲取的 為離散三維坐標點,且在森林中地真資料難以獲得,因此通常無法確認數值模型成果 的準確性。而本研究其中一個目的即是透過多種光達資料分別製作樹冠高度模型,來 比較其中的差異,進而評估利用光達點雲在製作樹冠高度模型的成果。 除了在製作樹冠高度模型外,目前也有許多研究利用空載光達系統進行葉面積指 數的推估。葉面積指數在森林中能夠表示林木樹冠的生長情形,而植冠會進行多種功 能影響整個環境,如光合作用、蒸散作用、呼吸作用等,都與整個地球的水資源循環、 碳含量的變化息息相關。藉由地面直接量測、地面光學儀器、或光譜影像等方式都能 得到森林葉面積指數(Jonckheere et al., 2004;Masona et al., 2012 ),但礙於森林範圍廣 大且難以進入的特性,而發展出使用航遙測的方式來進行葉面積指數的量測。遙測技 術中的空載光達包含能得到三維的點雲資訊及部分穿透的特性,對於用來了解森林樹 冠結構有很大的幫助。就葉面積指數的定義而言,當葉片的數量越多則其值越高,因 此可以透過光達雷射光束經過樹冠到達地面所產生的點雲分佈,計算穿透率的指標來 估計葉面積指數。Morsdorf (2008)、彭炳勳(2007)、及 Solberg(2010)皆利用光達點雲 的穿透率指標來推估針葉林的葉面積指數,而成果的 R2 都能達到 0.7 以上,顯示出 穿透率指標對於葉面積指數能有良好的解釋能力。由於穿透率指標是利用光達點雲的 分佈進行計算,若是量測的森林型態過於複雜,所得到的點雲資料無法完整表達森林 之結構,則會影響穿透率指標的計算,導致得到錯誤的推估成果。因此另一個目的為 3.
(14) 利用空載光達資料來推估南仁山生態保護區闊葉林的葉面積指數,並測試不同穿透率 指標在推估葉面積指數上的表現。. 1.3 研究方法與流程 本研究中利用了全波形和多重回波點雲資料來進行樹冠高度模型以及葉面積指 數的估計。而全波形點雲是來自光達系統中所記錄的反射波形資訊,再透過 Wang( 2012) 提出的回波偵測法來得到。整體的流程如圖 1-2,先將點雲進行過濾和 分類的處理,利用分類後的地面點和單一回波及多重回波的點雲製作出 DEM 和 DSM,再將兩種模型得相減即可獲得樹冠高度模型。最後針對不同光達點雲製作的樹 冠高度模型,比較分析它們之間的差異。而第二個部分,則是應用空載光達點雲在森 林中三維空間中的分佈,計算出五種穿透率指標來進行葉面積的估計。利用與現地量 測資料進行線性迴歸的方式,來判斷穿透率指標在估計闊葉林葉面積指數的能力。接 著選取其中 R2 較高的穿透率指標,和計算得到的估計方程式來推估整區的葉面積指 數。. 4.
(15) 全波形光達 現地葉面積指. 波形資料. 數觀測資料 回波偵測. 全波形光達. 多重回波. 點雲. 光達點雲. 點雲資料處理. 數值表面模. 數值地形模. 型(DSM). 型(DEM) 計算光達點雲穿透 率指標(LPI) 尋找最適合計. 算範圍 迴歸計算. 樹冠高度模型 (CHM). 圖 1-2. 葉面積指數. 產生全區葉. (LAI). 面積指數圖. 本研究流程圖. 1.4 論文架構 本研究分成五個部分來進行討論,各章節主題如下 (一) 描述森林的重要性和台灣森林的現況,和森林在現地測量的方法。說明遙測技術 在森林測量可以提供的幫助,及目前光達資料在森林區域的應用,並提出研究的 構想,及全波形光達資料。 (二) 說明森林樹冠模型以及葉面積的定義,和實際上的應用。並引用參考文獻說明目. 5.
(16) 前測量方式,以及各方法的優缺點。 (三) 光達系統的原理,以及傳統光達和全波形光達的差異。描述點雲穿透率的概念、 指標的計算方法,和森林應用之關係 (四) 研究方法整體流程,包含了光達點雲的資料處理、產製數值地形模型的方法,以 及用來評估成果的指標說明。 (五) 說明實驗區域的特性、選擇該區的原因、使用的光達資料,以及現地資料測量方 法。比較不同光達點雲在製作樹冠高度模型的差異,並利用現地葉面積指數的觀 測資料和點雲穿透率指標進行迴歸分析和比較。 (六) 針對成果進行討論分析,並提供一些未來可能的發展。. 6.
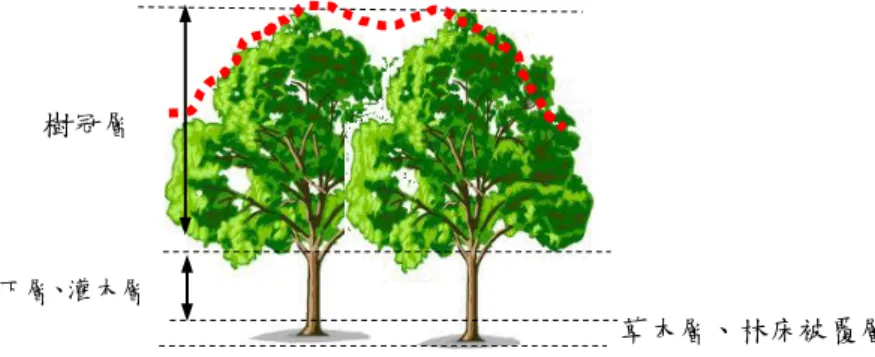
(17) 第二章 森林樹冠高度模型及葉面積指數 森林生態系統的監測,是觀測其分布的樹種、樹高、林木的生長或是葉片的數量 等森林結構之特性,以獲得森林生態系統的量化評估指標。對於森林結構資訊之獲取, 一般來說,人員現地調查是最直接的觀察,但現地調查的工作費時又費力,且人員難 以深入林地進行調查,應用遙測技術觀測森林生態是目前較為務實的方法。而常被使 用於森林研究的遙測資料包括多光譜影像和光達點雲,前者的特點為可透過光譜反射 性質去測定出植被的量,屬於平面的植生量;而光達系統的特點在於雷射光能部分穿 透樹冠層,得到三維結構的點雲,可進一步的用來估計樹高或森林的結構等。 本研究的目標是應用空載光達點雲資料估計森林植生量,如樹冠高度模型及葉面 積指數等,在此先描述這些植生量的定義和計量的方法,以及這些植生量對於森林生 長的意義。. 2.1 樹冠高度模型(CHM) 一般來說,依垂直空間的分佈可以將森林大略分為樹冠層(Canopy layer)、下層 (understory)、灌木層(shrub layer)、草本層(Herb layer)及林床被覆層(Forest floor cover) (劉棠瑞蘇鴻傑,1983)。但其中森林種類分佈複雜,會因樹林的種類有不同的分層方 式,而層與層之間也有互相重疊之關係。而樹冠即是樹木最頂層如帽冠的部位(圖 21),主要為森林中優勢樹種和次優勢樹種的樹葉和樹枝部分,可以直接受到大量陽光 的照射,是森林中主要進行光合作用產生養分的地方。對於整體環境來說,樹葉完整 茂密的樹冠可以減緩雨水下降至地表的速度,提高被土壤吸收利用比率,並防止土石 被沖刷的危險。而這些樹冠底下所形成的空間更提供了許多動植物生長以及活動的空 間需求,空間越大表示能包含的生物量可能有更多的發展,因此也就代表一個森林的 生態系的大小。Lefsky(1999)提出的樹體積定義即是以這個概念,將包含樹體本身的 體積以及樹冠下的空間都稱之為樹體積。 7.
(18) 樹冠層. 下層、灌木層. 草本層、林床被覆層. 圖 2-1 森林分層示意圖. 樹冠高度模型(canopy height model, CHM)的涵蓋的範圍從森林的最上面之表層 到地表面的範圍(圖 2.1 的紅色虛線到地表之範圍)。在實務上 CHM 定義由數值表面 模型(DSM)與數值高程模型(DEM)在森林區中的差值來得到(圖 2-2),為正歸化數值地 表模型的(nDSM)一種,可以顯示出地上物體之高度。 在樹冠高度模型中,隱含了樹木的高度、林木材積、林木密度和分布範圍等等。 透過不同時期的樹冠高度模型,可以用來得知在森林生長的變化、復育林木的成果以 及環境是否遭受到破壞等等。或是針對樹冠高度模型的樣貌,來了解各個林木間分布 的情形,評估森林生態的發展。因此對於森林研究來說,準確的樹冠高度模型能夠提 供了許多重要的資訊。 (a). (b). (c). 圖 2-2 (a)數值表面模型(b)數值高程模型(c)樹冠高度模型( Kellner, 2009). 2.2 葉面積指數(LAI) 2.2.1 定義及意義 葉面積指數(Leaf area index, LAI) 是 Waston(1947)所提出的概念,代表的意義為. 8.
(19) 單位土地面積上,所有植物的葉片總面積。也就是當在單位面積上沒有任何的葉片, 則該區的葉面積指數為零,隨著葉片的增加,指數就越來越大。LAI 是一個定量分析 地球生態系統能量交換特性的重要結構變數。因為它不僅能當作來預估農作物產量和 病蟲害的評估的指標參數,還能夠描述林冠特性,推估森林二氧化碳、水和氧氣交換 率的重要參數(浦瑞良及宮鵬,2002) LAI 能夠以簡單的方式來表示在單位土地上,葉片的多寡。而在植物的生態中, 葉子中含有葉綠素可以行光合作用,為提供養份的重要角色。而且葉片能行呼吸及蒸 散作用,幫助植物進行水資源的循環和固碳作用。對地球的生態而言,葉子為重要的 氧氣來源,還能夠幫助淨化空氣、增進水土保持減少土石流失等,都說明了葉量多寡 在森林中的重要性。因此可用來表示葉片含量的葉面積指數為一個很具代表性的指 標,透過監測這個指數,可以推估該區域能行光合作用、產生氧氣以及提供林木生長 的能力。 就整體林木而言,LAI 可用來表示森林樹冠的結構。而樹冠的茂密程度會影響太 陽輻射能在穿透時的消散作用,通常以消光係數來表示,而該指數可以反映出森林的 蒸散作用、雨水截留的能力,進而可用來推得地球水循環的情況,以及氣溫的關係。 因此可被用來觀測多種森林上的現象的 LAI,對於我們管理森林,甚至是了解地球氣 候、環境變化的趨勢都有很大的幫助。. 2.2.2. LAI 估計方法. 目前量測葉面積指數的方式有許多種,一般可分為直接估計法與間接估計法 (Gower et al., 1999)。在早期一般都是使用直接估計法,而隨著科技的發展,開始有其 它更方便快速的間接推估方式,以下列出幾種最常看到的測量方式,並比較其在森林 中測量葉面積指數的優缺點: (1)直接估計法 直接量測葉面積指數的方法是透過收集來的葉子進行分析,並在同樣的區域進行. 9.
(20) 長期的收集,利用不斷重複的量測方式來得到葉面積指數,因此被視為較準確的量測 方法。而收集葉片的方式可分為兩種,一種是用破壞性的方式,另一種則是收集落葉。 破壞性直接法收集葉片的方式是取樣於較均值的樣本區內,對於少數的樣本樹的每一 片葉子都進行採樣,在利用測得知數值推估其它同齡的樹木。而落葉收集法是針對落 葉季風林等會因季節變換產生落葉的森林區,在樣本區來放置固定的網子來收集落 葉。收集到葉子之後,測量每片葉子的面積及絕乾重,再以每單位的土地面積進行計 算得到該區域葉面積的指數。 直接收獲法雖然能較精確的計算出葉片的面積,但在複雜的森林中取樣困難,且 具有破壞之特性實際上難以進行。就理論而言,透過直接法可以得到最準確的葉面積 指數,但必須耗費大量的時間和人力,或是必須進行破壞性的量測方式。而且葉面積 指數為一個動態的指標,會隨著時間變化,因此要使用直接法完整的量度並隨時監測 大範圍葉面積指數,在實務上是幾乎無法進行的。 (2)間接估計法 這裡介紹較常使用的地面光學儀器,以及遙測技術中的光譜影像和光達系統點雲 推估葉面積指數的方法。 (i)地面觀測法 此類的方法可分為接觸式和非接觸式的量測,其中因非接觸的方式較為便捷和快 速,且可得到準確的量測成果,因此本研究以 LAI-2000 的儀器來當作葉面積指數的 地真資料。 LAI-2000 的儀器是利用樹冠透光的原理,以魚眼鏡頭的光感應器水平向上接收 樹冠底下的光線,並同時以另一台儀器接收未受到遮蔽的全天光進行光亮的比較,藉 由其中的亮度比值求得葉面積指數。最理想的測量天氣和多數的地面光學儀器如半球 面攝影法一樣都在陰天,來避免大量的光線反射作用。但若是大晴天下,LAI 也可以 在適當的操作下進行測量,因為當光線進入到探測器之前,會先透過濾光器濾除波長 大於 490nm 的光,減少經樹葉反射出來的光波。在光線較大、或是遮蔽物較多時也 10.
(21) 可在光感應器上加透鏡遮蓋,使得光照環境能夠較一致,增加量測之準確性。其中, 光感應器的魚眼透鏡頭接受的光線會以五個同心圓的方式(圖 2-3),分別記錄不同角 度範圍內的光線。每個環形所接受的光線,會依照天空照射的範圍進行比例上的計算。 最後在同時輸入冠層上下的數值進行相除,得到冠層截獲之輻射後在進一步推得葉面 積指數。. 7∘23∘38∘56∘68∘. 控制器 光感應器 透鏡遮蓋. 圖 2-3. LAI-2000 植冠分析儀( Anon , 1992). (ii)多光譜影像觀測法 透過光譜反射率曲線圖(圖 2-4),可以明顯看出綠色植物在某些波段的反映有明 顯的特徵。主要是因為植物中的葉綠素對近紅外光會有強烈的反射,造成從紅光到近 紅光大約在波長 0.7μm~0.8μm 的反射曲線有急遽上升的現象。這段反射率從約 10% 快速攀升至 50%的現象被稱為「紅邊效應」,為用來辨識植物最敏感的指標。除了近 紅外光外,植物在可見光中波長 0.45μm ~0.67μm 也有明顯的變化,因為葉綠素會 大量吸收該藍光(0.4μm ~0.5μm)和紅光(0.6μm ~0.7μm)的輻射能進行光合作用,而 對綠光產生高反射的結果。. 11.
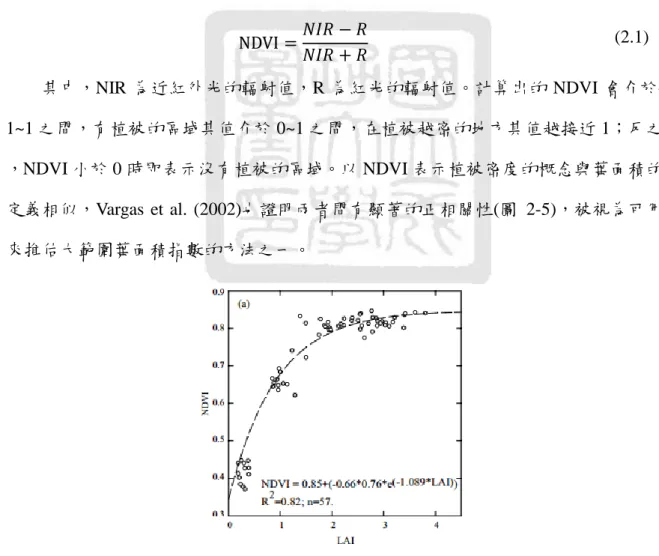
(22) 圖 2-4 裸露地、植物和水的典型光譜反射率曲線圖(Lillesand et al.,1987) 針對近紅外光與紅光在植物上特殊的反射特徵,可組成植物的判識指數。而常態 化植生指標(Normalized Difference Vegetation Index, NDVI)為最常被應用來監測植物 的生長、分布範圍,因為 NDVI 的計算簡單且能清楚表示植物判識的資訊,公式如下。 NDVI =. 𝑁𝐼𝑅 − 𝑅 𝑁𝐼𝑅 + 𝑅. (2.1). 其中,NIR 為近紅外光的輻射值,R 為紅光的輻射值。計算出的 NDVI 會介於1~1 之間,有植被的區域其值介於 0~1 之間,在植被越密的地方其值越接近 1;反之 ,NDVI 小於 0 時即表示沒有植被的區域。以 NDVI 表示植被密度的概念與葉面積的 定義相似,Vargas et al. (2002)也證明兩者間有顯著的正相關性(圖 2-5),被視為可用 來推估大範圍葉面積指數的方法之一。. 圖 2-5 NDVI 與 LAI 之間的關係圖(Vargas et al., 2002). 12.
(23) (iii)光達點雲觀測法 利用空載光達系統發出的雷射光具有穿透樹冠層的特性,可以得到在樹冠層下三 維 的 點 雲 分布。利用這些離散的分佈點可以計算出雷射點雲穿透率指標 (Laser Penetration Index, LPI),以此來表示雷射光束在樹冠間透光的比例,進而間接推估葉 面積指數。目前也有許多研究利用計算穿透率指標的方法來推估葉面積指數,而且都 能得到不錯的成果(Duursma et al., 2003;Jensen et al., 2008;Solberg, 2010)。Zhao(2009) 指出利用光達系統推估葉面積的方法較利用遙測影像中要準確,尤其是在生物量較多 的森林區。但一般光達系統在點雲數量萃取上存在個數及方法的限制,在較茂密的森 林區可能會造成點雲資訊的遺失。因此本研究同時利用了全波形光達點雲和一般光達 點雲的資料在闊葉林區進行實驗,比較全波形光達的穿透率指標是否在推估葉面積指 數上有較準確的結果,詳細的原理及方法於接下來的兩個章進行說明。. 13.
(24) 第三章 空載光達系統 空載光達系統為近年來蓬勃發展的航遙測技術,相較於傳統獲取二維影像的技 術,空載光達則是獲取密佈於地物表面的掃描點三維坐標,稱為點雲資料。光達系統 的雷射光束具有部分穿透樹林的重要特性,樹冠層之下也有點雲資料的分布,透過這 些三維空間的點雲,有利於我們了解森林內部的資訊。因此目前空載光達系統被廣泛 的應用於森林區的探測,像是製作地形模型,萃取森林的特徵如樹高、林木材積、生 物量,或是用於樹種分類等等(Nelson et al.,1984;Næ sset,1997;Hyyppä et al., 2008; Danson et al., 2009)。本研究主要利用光達系統建置樹冠模型來得到樹體積,計算點雲 的穿透率指標來推估森林葉面積指數。本章節說明空載光達系統的原理及特色,並描 述應用光達點雲產製地形模型和計算穿透率的概念。. 3.1 系統原理 空載光達的發展源於 1970 年代的雷射測高儀,其原理為利用發射和經地面物體 反射的雷射光時間差,求得發射器與地表的距離。隨著結合全球定位系統(Global Positioning System, GPS)和慣性導航系統(Inertial Navigation System, INS)的定位及定 方位系統(Positioning and Orientation system, POS)發展成熟,德國 Stuttgart 大學將雷射 掃描技術與 POS 結合成具有精確定位能力的空載光達系統(Ackermann, 1999),其系 統架構如圖 3-1 所示。. 14.
(25) 圖 3-1 空載光達系統示意圖(Leica GeoSystems, 2004) 空載光達系統主要是以雷射光對地面進行掃描,記錄反射訊號的時間差來計算載 具到地表物之距離。搭配載台上的 GPS 與地面控制點基站可以求解出載具掃描當時 的位置,並同時用 INS 輔助來得到飛行時的姿態,最後進行整合求解後即可得到大量 密布於地面的三維坐標點,即稱為點雲(point cloud)。. 3.2 光達點雲資料性質 利用空載光達,除了像一般遙測技術能快速獲取大範圍的資料之外,更具有部分 穿透的特性。因為當空載光達從空中發射出雷射光時,光束會有發散的現象,使得一 條反射的雷射光在抵達地面時會形成約數十公分到公尺直徑大小的圓形範圍,此區域 即稱為光跡(footprint)。光跡的大小與光達儀器的種類、雷射光的發散角和飛行的航高 有關,基本上發散角越大、航高越高,都會使雷射光所涵蓋的光跡變大。 由於在雷射光圓形光錐範圍內,雷射光可能會接觸到許多地物,產生不同強度的 回波資訊。而一般的傳統光達在單一脈衝的回訊下,會根據回訊的強弱,選出較強的 一到四個回波訊號,並將其轉成點雲資料提供給使用者。因此在空載光達系統中,可 以包含多重回波的點雲,提供了地物三維空間的資訊(圖 3-2)。簡單就地物的類型來 說明,假如雷射光打到一個空曠、無其他物體遮蔽的地表面或建物表面,只會產生單 一的回波訊號。反之,若是掃描森林等具有多層高度的區域,雷射光首先會打到樹梢, 再來可能有樹枝、草叢等,最後才會是地表的反射。因此我們可以根據這些多重反射. 15.
(26) 回波的點雲位置,將其應用在森林中了解雷射光對於樹冠的穿透情形,以推斷森林的 茂密程度。也可以利用光達系統產生出來的雖然是離散的點雲,透過點雲的高度、點 雲和點雲間分佈關係,來辨別出地面點和非地面點。 單一回波. 多重回波. 圖 3-2 光達點雲在森林分布之剖面圖:灰色點為單一回波值;綠色點為多重回波 的第一回波訊號;紅色點為多重回波的中間回訊;橘色點為最後一個回波值. 3.3 全波形光達系統 3.3.1. 全波形資料性質. 隨著儀器的發展,不同於傳統光達系統只提供三維坐標點資訊和其量測的強度 值,新一代光達系統除了能夠直接提供含三維坐標的點雲,還有當時雷射光束反射的 波形資料。透過全波形光達記錄的波形資料,我們可以反推雷射光穿透樹林的反射資 訊(圖 3-3)。根據這些隱含在波形中的資訊,使用波形反應特徵萃取方法重新偵測點 雲,可得到更多、更完整的點雲,而不受限於一般多重回波光達在同條雷射中最多只 能獲取四個回波位置。因此在茂密的森林區中,地形地貌較複雜的地區,有機會能夠 萃取出比較完整的點雲,得到更正確的森林結構。. 16.
(27) 圖 3-3. 3.3.2. 全波形光達與一般光達在穿透樹林之示意圖(Diaz, 2011). 全波形響應偵測. 全波形光達可以記錄完整波形資訊,由波形資訊可以推得地物的形貌。但波形資 訊會受到雷射光波長的解析力影響,當光束連續經過多樣物體時,波形可能會無法明 確反應出各別的地物,而有重疊波形的產生或在因能量的減弱而有較弱的波形。目前 偵測全波形資料的點雲方法有許多種,像是區域最小值法、高斯擬合法(Wagner et al., 2006)等等都能從全波形資料中萃取出回波響應的位置。 針對森林區監測的應用,當雷射光束在穿透較茂密的樹冠時,可能密集接觸到樹 葉、樹枝及樹幹,因而產生重疊回波的現象,而最後抵達地面時剩餘的能量只能產生 微弱的回訊,如圖 3-4(a); 而若雷射光束抵達地面時,可能先觸及矮灌木或雜草也會 有重疊回波的現象,如圖 3-4(b),這些現象都容易造成回波響應偵測上的困難。此研 究採用 Wang (2012)所提出的方法進行回波的偵測,此法是假設發射波形與反射的波 形都為高斯曲線,應用小波轉換的概念(圖 3-5),以不同尺度的小波去找出最符合實 際情況的回波響應數量,可以針對較弱的回波或是重疊的回波進行萃取和分解,根據 Wang (2012)的實驗成果,從全波形光達資料可獲得的回波響應數量,約比一般傳統光 達多 10%~15%。接著使用高斯混合模型(Gaussian mixed model)來擬合波形,以得到. 17.
(28) 波形的波高、波寬、及 cross section 等將回波波形特徵。. 圖 3-4 光達產生(a)弱回訊或(b)重疊回波的現象(Wang, 2012). 圖 3-5 利用小波轉換的方式偵測波形 (Wang, 2012). 3.3.3. 全波形點雲. 由於一般光達提供的三維點雲有點數上的限制,一條反射回訊最多只取四個點雲 位置,在較複雜的區域可能有資訊流失的現象。相較於一般的點雲(圖 3-6a),透過全 波形資料萃取後的點雲資料可以得到較多且更完整的點雲(圖 3-6b)。因為地表面和樹 冠的區域都較容易產生較弱回訊和重疊回訊,在一般光達儀器內的即時解算無法獲取 這些點雲,造成資料的遺失。而在進行全波形資料萃取後,可以明顯看到在地表面和 樹冠區都增加了許多點雲。從研究成果顯示,全波形資料萃取出的點雲能比一般光達 多超過百分之十的點。除了可有效萃取出更完整的點雲,還能從全波形資料的波形特 徵推算出地物的物理性質,得到一般光達點雲資訊之外的地物波形特徵,如 cross section、波寬等。增加了更多能反映地物的資訊,也因此被視為在地物分類上有其優 勢(Reitberger et al., 2008)。. 18.
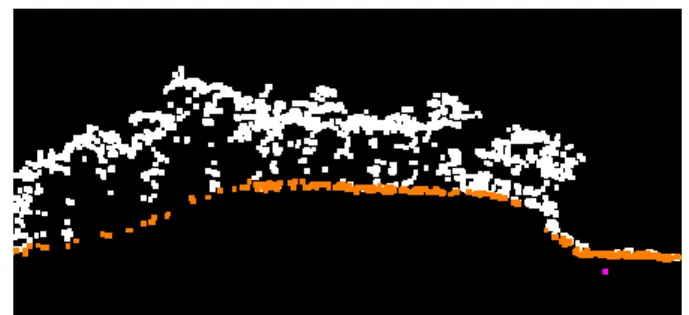
(29) (a) 一般光達點雲 一般光達點雲的地面點. (b) 一般光達點雲+全波形光達點雲 全波形光達點雲的地面點. 一般光達點雲的非地面點. 全波形光達點雲的非地面點. 圖 3-6 全波形和傳統光達點雲示意圖. 3.4 光達點雲資料處理 如本章節一開始所言,光達點雲的形成是透過系統接收物體反射之雷射光的時間 差所推得,但在現實中我們無法得知光束接觸地物之位置,尤其是在森林區包含多重 回波資訊的區域。因此為了確認這些點雲位置的正確性,並踢除可能是因為雜訊而產 生的錯誤點,一般都是透過高密度、高重疊的飛航掃描方式來提高量測的精度。藉由 這些高密度的點雲,可以利用其中幾何分布上的關係分辨出地面點、非地面點,以及 可能是錯誤的點雲(圖 3-7)。 本研究使用 MicroStation 軟體處理點雲,利用 terra scan 的內建功能先剔除在幾 何分佈上過低的錯誤點,再把點雲分成地面點和非地面點,最後用人工編輯的方式, 增加分類上的正確性。當把點雲分類成地面點和非地面點後,就可以所需的點雲進行 內插計算製作成數值地形模型,或是透過點雲間三維的分佈關係計算穿透率指標。. 19.
(30) 圖 3-7 光達點雲分類示意圖 (白色點為非地面_樹木或建物等;橘色點為地面;桃色點為錯誤點). 3.4.1. 數值高程模型(DEM). 數值高程模型(Digital Elevation Model, DEM)是描述不含植被及人工構造物之地 表,為地球自然表面高程起伏的數值模型。一般來說 DEM 是指自然的地表,但由於 人為的開發的關係,像是人造馬路或人行道等人造之地表面也包含在 DEM 中。而構 成 DEM 的形式有兩種,一種由離散的網格點組成,另一種則是以不規則的三角網組 合而成。由於離散規則網格點便於應用及數據管理之特性,目前多採用該方式來建立 模型。但規則網格的紀錄方式,對地表的解析能力受限其網格大小,若需要得到較高 的解析力就必須增加網格的密度。而若要表示地形特徵處如山脊線、山谷線或斷崖的 地方,就必須增加特徵點的量測。DEM 的用途廣泛,像是可以用在水管管線、建設 工程的規劃、等高線地形圖的繪製,或是正射影像的製作等。在各種領域都有其不同 的用途,可說是地理資訊中相當重要的資訊。 目前 DEM 主要的生產方式是透過遙測影像進行立體製圖或光達點雲獲取地面高 程,再進行內插來得到地面模型。在森林區中,因為有樹冠的遮蔽,無法透過遙測影 像來取得樹冠下的地表。而光達系統具有部分穿透的特性,除了樹冠表層的資訊外, 也能夠獲得樹冠下地表的點雲。一般而言,雷射光最後接觸到的地物即是地面的位置, 但在現實中有許多雷射光無法穿透的地物,而無法得到地表面的資訊。因此在自動分 類上是透過這些離散點雲在空間中的分佈,根據地形的起伏狀態設定角度等參數來進 行。為了確保在分類上的準確度,尤其是針對地形起伏較大或地面點較少的區域,一 般都必須使用人工編修的方式做進一步的分類處理。接著在將分類後的離散地面點進 20.
(31) 行內插,即可得到 DEM(圖 3-8)。而 DEM 的精細程度與地面點的分佈有密切的關係, 若在地形起伏劇烈的地方能得到密度較高的點雲,則能夠內插出與現實較一致的模 型;反之,若是點數太少則會遺失部分的資訊,造成模型的缺失。因此為了能得到較 好的 DEM,在地形變化大的地區,通常會利用高密度或高重疊的掃描方式進行量測。 自動濾除錯 光達點雲. 誤點並分纇. 地面點. 人工編修. 內插. DEM. 圖 3-8 數值高程模型(DEM)製作流程. 3.4.2. 數值表面模型(DSM). 數值表面模型(Digital Surface Model, DSM)為包含建物、植被等地物最上層之表 面的三度空間數值模型,也就是從空中向下所看到之物體表面的三維高度。當在空無 一物的平地時,DSM 即等同於 DEM,但在現實中地表上包含了許多的地物,像是樹 木、建物等都會讓地物表面有高於 DEM 的起伏變化。在應用方面,DSM 可用來幫助 飛機的飛航規劃,以免飛行時撞擊到地物。在森林區域,可監測林木之生長,或是用 在城市區,來了解城市中建物的現況。 DSM 與 DEM 的表現方式相同,目前多以規則網格的離散點組成。這些離散的高 程點資料,由於某些建物和森林的高度難以用地面測量的方式得到,而多以遙測方式 進行量測。使用遙測影像必須經由立體製圖才能得到高程資訊,要耗費較多的人力和 時間,因此也漸漸以光達系統為主要製作工具。 利用光達系統來製作 DSM 時,通常會先使用回波數將點雲進行分類。就如 3.2 節所描述的,一條雷射光有可能會接觸到多個地物,產生多回波的點雲。一般而言, 當一條雷射光束從飛行載具向下掃描時,最先接觸到的地物即是所謂地表的最上層。 因此我們可以取每條反射光束所產生的一個點雲,也就是第一回波或單一回波的點 雲,來表示地物表層之高度。最後利用這些離散點雲進行內插,即可組成 DSM。. 21.
(32) 3.4.3. 點雲穿透率. 如 3.1 節所敘述,雷射光具有部分穿透能力的特性,偵測其回波訊號能夠獲得多 重回波資料,若應用於森林監測可以獲取樹冠底下之點雲。因此我們可以應用空載光 達技術觀測森林三維空間中林木分布的情形,並利用分類過後的點雲計算森林中樹冠 點雲和地表點雲的比例,藉以表示樹葉的茂密程度。 應用不同廠牌的光達系統,或是使用不同飛航掃描方式,都會造成光達點雲分佈 上的差異。黃清美(2007)中提到當雷射光的入射角不一樣時,對穿透率會有影響,當 雷射角度較大時,比較容易受到樹幹等地物影響,降低穿透樹冠打到地面的比例。 Morsdorf (2008)發現除了雷射角之外,掃描時的航高對計算穿透率指標來推估葉面積 指數也有影響。因此在使用光達推估葉面積指數時,計算穿透率指標的穩定性是必須 考慮的問題。本研究針對不同光達系統的點雲資料計算穿透率指標,比較各種不同的 資料及計算方法的組合在推估葉面積指數上之差異,實驗上共使用了五種穿透率指 標,詳細的計算方式將在下一章說明。. 22.
(33) 第四章 樹冠高度模型和葉面積指數的估計 空載光達系統可以藉由反射的雷射光資訊,提供三維的點雲資料。因此我們可以 利用這些點雲間的關係推算地物分布的情形,目前最常見的像是利用點雲來建置房屋 模型、地形模型。而若應用光達點雲於森林監測,可用來建立樹冠模型及林木形狀、 或是藉由點雲空間分布的分類計算穿透率指標,進而推算森林中的指標如林木材積、 孔隙率、葉面積指數等。 觀測森林所得的光達資料,會受到樹冠的鬱閉程度、立木密度和光達的光跡大小 的影響。在森林較茂密的地區,空載光達可能會因為雷射光無法穿透到樹冠下,造成 森林結構點雲萃取上遺漏,因此無法得到完整的樹冠剖面資料(Nelson et al., 1984)。或 是因為光達光跡較小、單位面積上點雲密度過少時,會因光達掃描雷射光沒經過樹頂 造成樹冠樹頂面低估的可能(Naesset, 1997;Suarez et al., 2005)。因此本研究除了以光 達點雲資料製作樹冠高度模型和穿透率指標的計算之外,分別使用了全波型光達和傳 統型光達點雲資料,比較經過波型萃取的光達點雲是否能得到較完整的森林結構,進 而提升對葉面積的量測成果。本章節即是說明如何利用處理後之一般光達點雲和全波 形點雲,進行樹冠高度模型和葉面積指數的推估。. 4.1 樹冠高度模型估計 樹冠高度模型(Canopy Height Model, CHM)是由數值表面模型(DSM)和數值高程 模型(DEM)兩種模型所相減而得,圖 4-1 展示森林區典型的光達點雲剖面圖,以及所 萃取得的 DEM 及 DSM 剖面。CHM 可以用於描述森林區域樹木的形狀和範圍,諸如 林木高度、樹體積、林木位置等。如上一章節中所說,由於森林的地形複雜,人員不 易進入測量該地區的地形變化,且森林區有茂密的樹冠覆蓋,難以用遙測影像找尋匹 配點進行立體製圖,甚至無法觀測到地形起伏的情況製作 DEM,因此目前多使用空 載光達點雲的資料來進行樹冠高度模型的製作。Næ sset(1997)以光達點雲的最後回波 23.
(34) 值高度,加上胸高直徑來推算樹的平均高度,最後得到的結果普遍有低估的情形。其 主要原因為當光達系統在進行掃描時,可能會錯過樹木最高點的位置,或是因為最高 點的樹梢回訊較弱而無法取得,因此取到的樹高通常會比實際樹高要來的低。本研究 透過 DEM 及 DSM 的製作建立 CHM,其製作流程圖如圖 4-2。 (a). (b). (c). 圖 4-1 利用空載光達點雲製作樹冠高程模型示意圖 (a)數值高程模型(DEM) (b)數值表面模型(DSM) (c)樹冠高度模型(CHM). 光達點雲 濾除錯誤點 並分類. 第一回波和. 地面點. 單一回波點 內插. 內插. DEM. DSM. CHM. 圖 4-2 製作樹冠高程模型流程圖 數值高程模型的精度也會影響森林體積的估算,尤其是在地勢起伏較大的山區, 24.
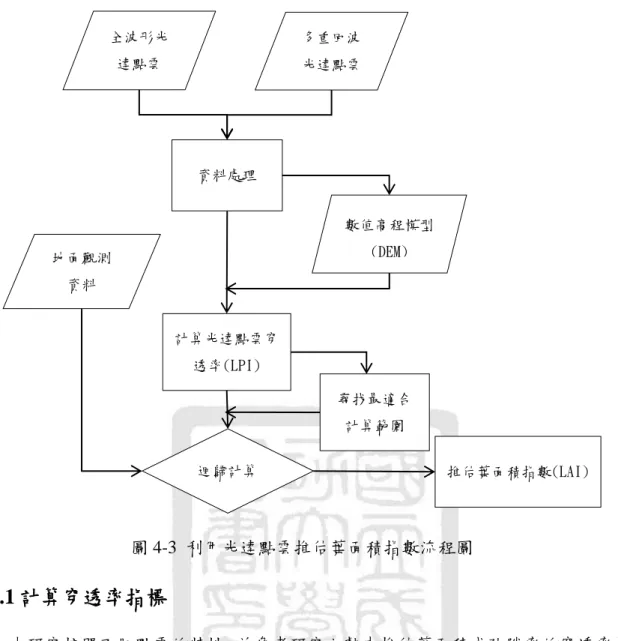
(35) 若是能有較準確的地形模型(DEM),才能夠得到較好的樹冠高程模型 (蕭淳伊, 2008) 。因此我們在製作 CHM 之前會針對 DEM 的部份,比較利用全波形光達點雲 和一般光達點雲製作成果的差異。而模型的網格大小也是個考慮的重點,因為若單位 網格內的點雲數量過少會容易造成取樣不足有產生錯誤(Naesset, 1997)。在彭炳勳 (2007)研究中也顯示,樹冠模型的網格大小和計算面積對評估林分平均高都會有影 響。在其測試下,以空間解析力為 3 公尺之網格,搭配 15 公尺×15 公尺的計算面積 可以得到最符合實際樹高的成果。因此本研究利用了三種不同的光達系統點雲資料, 並配合點雲密度切割適合的網格大小製作樹冠高度模型,來比較其中的差異和製作之 精度評估。. 4.2 葉面積指數估計 利用光達資料推估葉面積的方式,乃藉由點雲的分佈,計算出能夠表示林分樹冠 與地表間關係的穿透率指標(Laser penetration index, LPI)。接著再將計算得的穿透率 指標,和已知的葉面積指數測量的樣本點資料進行迴歸計算,最後得到光達穿透率指 標推估葉面積指數的模型參數。其中,由於無法確認地真資料所涵蓋的範圍,因此以 測試的方式,尋找出最適合穿透率指標推估葉面積指數得計算範圍。最後再以最佳的 迴歸參數,針對大範圍的森林區進行葉面積推估。以下之各小節分別針對點雲穿透率 指標,敘述估計葉面積指數作業流程(圖 4-3)中各個步驟的詳細做法。. 25.
(36) 全波形光. 多重回波. 達點雲. 光達點雲. 資料處理 數值高程模型. (DEM). 地面觀測 資料. 計算光達點雲穿 透率(LPI) 尋找最適合 計算範圍 迴歸計算. 推估葉面積指數(LAI). 圖 4-3 利用光達點雲推估葉面積指數流程圖. 4.2.1 計算穿透率指標 本研究按照不同點雲的特性,並參考研究文獻中推估葉面積或孔隙率的穿透率指 標計算方法,統整出五種葉面積的推估方法(Solberg et al., 2006; Hopkinson & Chasme, 2009; Arnaud, 2011)。其中,為了要和地面葉面積指數觀測資料進行比較,將 LAI2000 地面測量的高度(一公尺)設為門檻值,將此高度之下的點皆視為地面點雲。 第一種穿透率指標(LPI1)為較直觀的算法,是以地面點占全部點的點數來計算(式 3-1),多數研究文獻採用此算法(Solberg et al., 2006; Arnaud, 2011),LPI1 與植被覆蓋 率也有較好的相關性(黃清美,2007);第二種穿透率指標(LPI2)也是計算地面點和全部 點的比例,但改以點雲的強度值為比例的計算(式 3-2) (Solberg, 2008);第三種穿透 率指標(LPI3)是全部雷射光束的數量和地面點的點數比(式 3-3) (黃清美,2007;Zhao & Popescu, 2009);第四種穿透率指標(LPI4)是改良自第一種指標,對單一回波的地面 26.
(37) 點進行加權。此方法的想法來自在許多文獻中(Solberg, 2010;Morsdorf et al., 2006; Arnaud, 2011),除了使用第一種穿透率指標外,也使用了單一回波的點雲做穿透率指 標的計算,以全部單一回波的地面點和雷射數的關係推算葉面積指數。由於雷射光經 過樹冠層得到的多重回波訊號較為複雜,難以確定得到的點數與茂密程度成現絕對的 的正比關係,因此本研究中將其合併使用,強調單一回波地面點在森林中顯示的直接 穿透性。. Ng = 地面點點數 Ig = 地面點強度值. LPI 1 =. ∑ Ng ∑ Ntotal. (3-1). LPI 2 =. ∑Ig ∑ Itotal. (3-2). LPI 3 =. ∑ Ng ∑ Nl. (3-3). LPI 4 =. ∑(Ng + Ng1) ∑ Ntotal. (3-4). Ntotal = 所有點點數 Itotal = 所有點強度值. Nl = 雷射光數量 Ng1 =Ng 中單一回波的點數. Solberg(2010) 利用點雲強度值和測試的物體反射率比值,推算雷射光照射地物 間面積的比例。因此本研究依據面積比例的概念,提出第五種穿透率指標(LPI5),主 要透過全波形中之 cross section (𝜎) 指標來推導出雷射照射面積。從 cross section 的 定義(Wagner et al., 2006) (式 3-5),我們得知雷射光接觸物體的面積可由雷射強度值和 cross section 計算而得(式 3-6)(Ω 一般假設為 2π)。而穿透率的指標 LPI5 即定義為(雷 射光到地面的面積總和)/(雷射光到地面的面積總和+雷射光打到樹冠的面積總和),如 式 3.7,式中 k 值乃的面反射率和植被反射率之比值,由於單一回波的雷射光打到地 物的面積可視為相同大小,因此由(式 3-8)之定義得知,利用單一回波的強度值可估 算雷射光在森林中地面和非地面的反射率比例(亦即求 k 值),再帶入(式 3-7)即可求出 LPI5 之數值。. 27.
(38) 4𝜋 𝜌𝐴 𝛺 Ω σ A= σ= , Ω = 2π 4πρ 4ρ 𝜎=. (3-5) (3-6). 𝜎 ∑ 𝑔 ∑ 𝐴𝑔 ∑ 𝜎𝑔 𝜌𝑔 LPI5 = = 𝜎 = ∑(𝐴𝑔 + 𝐴𝑐 ) ∑( 𝑔 + 𝜎𝑐 ) ∑(𝜎𝑔 + 𝑘𝜎𝑐 ) 𝜌𝑔 𝜌𝑐. ρ = 𝐼/𝐴. ,𝑘 =. 𝜌𝑔 𝜌𝑐. (3-7) (3-8). 𝜎 = cross section. 𝛺 = 物體反射角 ≈ 2𝜋. 𝜌 = 物體反射率. 𝐼 = 點雲反射率. 𝐴 = 雷射光與物體接觸的面積. 基本上這五種穿透率指標都是利用穿透過樹冠的地面點雲,來計算樹冠的穿透 性。在這些指標中不同的地方在於有的使用點數上的比例,有的是計算強度的比值, 或是利用隱含全波形資料中的雷射光照射地物的面積比去計算。當光達點雲資料均勻 且完整的分布在森林中時,LPI1 可以以簡單的點數比就能表示森林樹冠的疏密程度。 但是在茂密的樹冠區中,點雲的個數會受到雷射光的波長影響萃取時的解析能力,造 成在較茂密區的樹冠點不一定比較多。因此出現 LPI2 和 LPI3,分別以強度值或直接 捨棄樹冠點數用雷射數進行比例上的計算。而 LPI4 也是以類似的概念,增加直接穿 透點雲的比例。最後一個穿透率指標則是利用了全波形資料中的資訊,計算出雷射光 照射到地面的面積比,期望增加隱含在波形中的特徵提高對推估葉面積指數的準確 性。. 4.2.2 尋找最適合計算範圍 本研究使用 LAI-2000 的地面觀測資料為地真資料,與計算得的光達穿透率指標 進行迴歸分析。由於 LAI-2000 的設計為接收鏡頭上方距離天頂角 0∘~74∘內的光 線,而其實際接收範圍會受到整體森林的種類和型態、樹冠的密度等影響,無法確定 儀器接受的光照範圍(彭炳勳,2007)。對應光達點雲資料,各範圍內計算出的穿透率 指標因點雲的分佈或是掃描時的密度,都會有所不同。因此為了尋找本區域最適合計 算穿透率指標來推估 LAI 的範圍大小,本研究測試了距離樣本點中心半徑 1 公尺至 15 公尺圓範圍內的光達點雲分別計算 LPI(圖 4-4),並透過與現地 LAI 資料迴歸找出 28.
(39) 最佳的迴歸參數。 (a). (b). Radius of area. Radius of. 圖 4-4 光達穿透率指標計算範圍(a)側視示意圖(b)俯視示意圖. 4.2.3 葉面積指數的迴歸模式和評估方式 由於森林範圍廣大,在進行森林研究時難以實際量測到所有的資訊的,因此常利 用迴歸的方式,以測量的部分的樣本資料來進行整體的推估。本研究利用現地量測的 LAI 為依變數( y ),LPI 為自變數( x ),進行線性模式的迴歸(式 4-1)。利用已知的樣本 點,計算方程式中的參數( 0 、 1 )。. yi 0 1 xi , i 1,..., n. (4-1). 利用迴歸的方式可以了解穿透率指標和葉面積指數間是否相關、相關的方向與強 度,並且可以透過判定係數來估計迴歸方程式之適合度。而判斷係數(Coefficient of determination, R2)即是迴歸造成的平方和(SSR)占總平方和(SST)的比例,利用最小二 乘法的概念,找出誤差項平方和、迴歸項平方和計算得來。(式 4-2~4-4) n. SST ( yi y) 2. (4-2). i 1 n. . SSR ( y i y ) 2. (4-3). i 1. R2 =. 𝑆𝑆𝑅 ∑𝑛𝑖=1(𝑦̂𝑖 − 𝑦̅)2 = 𝑆𝑆𝑇 ∑𝑛𝑖=1(𝑦𝑖 − 𝑦̅)2 29. (4-4).
(40) R2 的數值範圍介於 0~1。當 R2 愈大,表示估計的誤差量越小,代表此迴歸模式 能夠解釋全體 yi 變異量的比例愈大。因此 R2 愈接近 1.0,代表此模式愈有解釋能力。 但當樣本數(n)較少時,對於式 4-4 而言,容易會有高估的現象,因此本研究中利用校 正後 R2(式 4-5)進行評估,減少樣本數量造成的膨脹效果。最後使用迴歸得到之參 數建立模型,來推估大範圍葉面積指數得分佈。 2 𝑅𝑎𝑑𝑗. (1 − 𝑅 2 )(𝑛 − 1) =1− , 𝑘 = 解釋變異之個數 𝑛−𝑘−1. (4-5). 在計算出最佳的迴歸方程式後,即可透過已知的參數建立推估方程式來推算整區 森林的葉面積指數。本研究估算的方式是先將要推估的範圍進行網格化,再根據樣本 點所得的最適合範圍半徑計算各網格的穿透率指標。接著將穿透率指標透過已知的迴 歸估計方程做計算,即可得到整區 LAI。. 30.
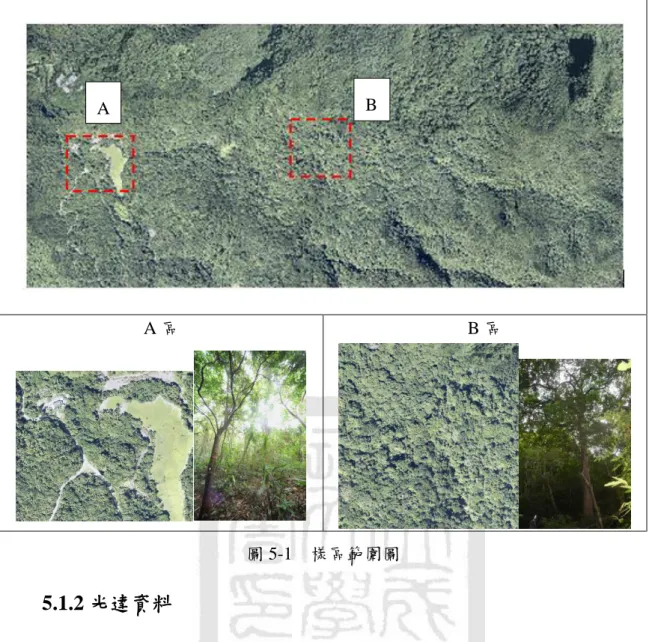
(41) 第五章 實驗成果與分析 本章先描述實驗資料的相關資訊,包含實驗區域的生態環境、空載光達資料的來 源及性質、以及葉面積指數的現地觀測方式及資料;第二節則說明以不同光達資料推 估得的樹冠高度模型之成果比較分析;第三節針對葉面積指數之估計成果,與現地觀 測資料進行迴歸分析,並將得到之估計方程式推估大範圍的葉面積指數。. 5.1 實驗資料 5.1.1 實驗區域 實驗區域位於台灣東南部的森林區,為熱帶季風型雨林,是台灣僅存的低海拔原 始林。其中森林型態複雜,孕育非常豐富的生態景觀。由於在複雜的闊葉林區中進行 地面測量葉面積指數時有許多限制,加上地形複雜、樹冠遮蔽嚴重,造成定位及取樣 不易。本研究在資料涵蓋區域選取了兩個小範圍區域,進行葉面積指數和樹冠高度模 型的估計(圖 5-1)。 在進行葉面積指數估計的部分,為了能進行樣本中心點的定位,選擇的是較靠近 西邊的地方(A 區),距離測區約 20~30 公尺外有較空曠之荒廢地能接收 GPS 衛星訊 號,並具有網路訊號以利 E-GPS 的施測,提供進行導線測量的控制點。該區的森林 型態為迎風面的位置,整體樹高不超過 15 公尺,呈現樹幹較細且立木間距較近的森 林型態;而製作樹冠高度模型的區域除了 A 區約 300×250m2 的範圍之外,也選擇了 位於背風面範圍大小約 250×250m2 的 B 區進行比較。該區的樹冠生長茂密,整體的 林木高度較 A 區來的高,其中的優勢樹種的高度約在 15~20 尺左右,地形包含了中 間低兩側高的溪谷型態。. 31.
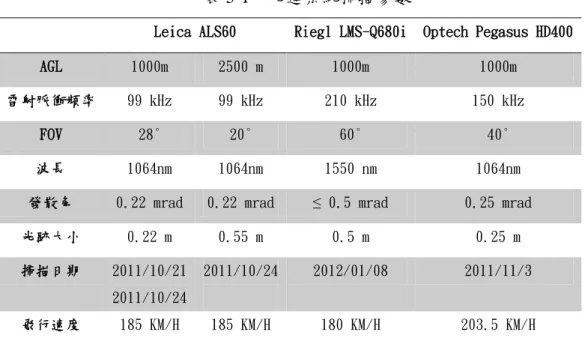
(42) B. A. .. A區. B區. 圖 5-1. 樣區範圍圖. 5.1.2 光達資料 研究中共使用了三種空載光達系統,分別是 Leica ALS60、Riegl LMS-Q680i 和 Optech Pegasus HD400,為了能獲取高密度的地面點點雲來製作數值高程模型,皆使 用低航高(離地面高度 1000 尺)且光跡直徑小於 1 公尺的掃描方式進行南仁山的量測 (表 5-1)。在 Leica 光達系統的部分,則是增加了高航高(離地面高度 2500 尺)的資料 來進行估計葉面積指數的比較。其中 Leica ALS60 和 Optech Pegasus HD400 光達系統 是利用加裝全波形資料記錄器的方式,因此可同時提供即時解算的多重回波光達點雲 和全波形資料;而 Riegel LMS-Q680i 儀器則是提供經全波形資料後處理過的三維點 雲以及全波形資料。藉由儀器提供的全波形資料,再利用經小波概念搭配高斯擬合的 方式,能夠萃取出研究中所使用的全波形點雲。. 32.
(43) 表 5-1. 光達系統掃描參數. Leica ALS60. Riegl LMS-Q680i. Optech Pegasus HD400. AGL. 1000m. 2500 m. 1000m. 1000m. 雷射脈衝頻率. 99 kHz. 99 kHz. 210 kHz. 150 kHz. FOV. 28°. 20°. 60°. 40°. 波長. 1064nm. 1064nm. 1550 nm. 1064nm. 發散角. 0.22 mrad. 0.22 mrad. ≤ 0.5 mrad. 0.25 mrad. 光跡大小. 0.22 m. 0.55 m. 0.5 m. 0.25 m. 掃描日期. 2011/10/21. 2011/10/24. 2012/01/08. 2011/11/3. 185 KM/H. 180 KM/H. 203.5 KM/H. 2011/10/24 飛行速度. 185 KM/H. 對於各種低航高光達系統的資料而言,本研究使用了三個高重疊航帶的 Leica 光 達資料,來提升在單位面積上的點雲數,期望能得到更完整的森林結構提高計算穿透 率指標的準確性,進而提升葉面積指數的估計。而在相同航帶的資料下,透過全波形 萃取出的點雲總數量可以增加約百分之三十左右,地面點的數量也有明顯的增加(表 5-3); Reigl 的部分相較於多重回波,利用小波方式萃取出的點雲數量增加的比例較 Leica 的資料少。其原因為 Riegl 原有的資料即是利用全波形資料萃取得來,在單一條 光束的回波訊號沒有受到點數的限制,因此與本研究中使用的全波形點雲數量較為一 致;雖然 Optech 在單位雷射數量上的地面點比例較高。但在本樣區只用了單一條航 帶的 Optech 點雲進行樹冠模型的製作,因此地面點相較於其他兩種資料來的要少。 而經全波形資料萃取出的總點雲雖有些許的增加,但主要增加的部分都是屬於地表上 樹冠層的區域,地面的數量反而有減少的現象。. 33.
(44) 表 5-2 A 區光達點雲的詳細資料 總雷射. 雷射密度. 光束. (pt/m2). 總點數. 點雲密度. 地面點點. 地面點雲密. (pt/m2). 數. 度(pt/m2). Leica 多重回波. 547758. 7.3. 600802. 8.0. 106975. 1.4. Leica 全波形光達. 541059. 7.2. 697642. 9.3. 115498. 1.5. Riegl 多重回波. 491364. 6.5. 657740. 8.7. 128060. 1.7. Riegl 全波形光達. 491296. 6.5. 723564. 9.6. 121432. 1.6. Optech 多重回波. 105884. 1.4. 161215. 2.1. 38885. 0.5. Optech 全波形光達. 106040. 1.4. 163837. 2.2. 36511. 0.5. 表 5-3 總雷射. B 區光達點雲的詳細資料. 雷射密度. 總點數. 2. 點雲密度. 地面點點. 地面點雲密. (pt/m ). 數. 度(pt/m ). 2. 2. 光束. (pt/m ). Leica 多重回波. 875503. 12.3. 1027138. 14.4. 22949. 0.32. Leica 全波形光達. 875518. 12.3. 1337504. 18.8. 38209. 0.54. Riegl 多重回波. 638711. 9.0. 930788. 13.1. 30406. 0.43. Riegl 全波形光達. 638663. 9.0. 1026081. 14.4. 33904. 0.48. Optech 多重回波. 96269. 1.4. 168830. 2.4. 12701. 0.18. Optech 全波形光達. 96291. 1.4. 179382. 2.5. 12413. 0.17. 5.1.3 現地觀測資料 在現地觀測的部分,我們一共在樣區內選擇了 10 個樣本點進行葉面積指數的量 測。為了確認各樣本點中心的位置,我們先在樣區附近較空曠的地方架設 E-GPS,進 行多次量測,並利用 E-GPS 量測測區周圍一等水準點 Q029、Q028 的坐標來進行修 正,以得到較準確的控制點坐標。利用測得的控制點坐標,我們以全站儀進行閉合導 線的量測,並架設儀器於圖根點上來獲取各樣本的中心位置。. 34.
(45) 圖 5-2. 現地定位測量. 在定位完成後,我們以 LAI-2000 進行葉面積指數的量測。量測的方式為使用一 台 LAI-2000 儀器架設於空曠處接收全天光光亮,同時使用另一台儀器進入樣區內, 在距離樣本中心點 0~1 公尺的位置,分別朝八個不同方向,高度約 1 公尺處向上接收 樹冠層下的光量(圖 5-3 )。為了降低量測時操作人員或其它近物之遮蔽,以及陽光過 度曝曬的影響,本研究中使用了 90∘的透鏡遮蓋輔助 LAI-2000 的量測。最後在將接 收的八個平均亮度與全天光下的亮度相比,即可得到該點樣本點的葉面積指數。. 樣本中心點. 圖 5-3. LAI-2000 測量方式之俯視圖. 5.2 樹冠高度模型成果分析 在樹冠高度模型的研究中,共使用了三種的低航高空載光達系統的資料在兩個區 域進行成果的比較分析。由於樹冠高度模型是由 DEM 和 DSM 組合而成,因此必須 35.
(46) 從離散點雲中先分類出地面點、第一回波和單一回波點來分別製作 DEM、DEM,再 將兩個相同網格大小的模型相減而成。因此在此章節中會分別比較 DEM、DSM 及 CHM 在利用 Leica 全波形光達點雲和多重回波光達點雲製作成果上的差異,最後在 進行三種光達系統的成果比較。. 5.2.1 單一光達資料之分析 由 Leica 光達系統得到的 DEM、DSM 及 CHM 成果如圖 5-4。透過這三種數值地 形圖,分別可用來了解該區域地形起伏的狀態、地物表層的起伏,以及植生分佈的情 形。但由於森林地表之地真資料難以獲得,因此我們透過比較不同資料的成果來進行 分析。 A區. B區. DSM. DEM. 36.
(47) CHM. 圖 5-4 利用 Leica 資料分別在兩個區域製作 DSM、DEM 及 CHM 之成果 其中,DEM 由光達點雲分類後的地面點內插而成,因此地面點的多寡和分類的 精度都會影響 DEM 的成果。由圖 5-5 中即可明顯看出,在 Leica 光達系統中全波形 點雲經分類後可以得到更多的地面點,有利於 DEM 的製作。 (a). 圖 5-5. (b). Leica 系統中的 (a) 一般光達地面點;(b)全波形光達地面點分佈圖. 對於 Leica 光達系統的資料而言,利用全波形光達資料製作出來之 DEM 與一般 光達的 DEM 由相當的一致性,標準偏差在 0.5 以下。但全波形的 DEM 平均高度略 低於一般光達 DEM 約 15 公分左右,其中差異最大的區域可達 4 公尺,如圖 5-5 可以 看到,造成差異最主要的原因是該區域地面點點數不足,導致經內插得到的成果有較 不同的地形起伏變化。在茂密的森林區中,雷射光必須經過較多的葉片及樹枝才能打 到地面,造成地表的反射能量較低形成較弱的反射回訊,而 Leica 的即時解算得到的 多重回波點雲無法有效反應出弱回訊的地物,導致遺失真正地面點的資訊。反之,利 用全波形的資料可以藉由完整的波形資訊,搭配有效的回波萃取技術,能找出較完整 的地物點點雲。 37.
(48) (a). (b). (c). 多重回波光達之 DEM 網格點 全波形光達之 DEM 網格點. 多重回波光達之地面點 全波形光達之地面點 (d). 多重回波光達之 DEM 網格點 全波形光達之 DEM 網格點. 多重回波光達之地面點 全波形光達之地面點. 圖 5-6 DEM 差異之比較圖:(a)DEM 差值圖;(b) DEM 差值統計直方圖;(c) 及(d)為圈選處放大圖及剖面圖 在 DSM 的部分,是利用點雲資料中全部的第一回波及單一回波點內插而成,使 用與 DEM 相同的克利金內插法所組合而成。應用不同點雲產製 DSM 的主要差異在. 38.
(49) 於點雲萃取位置的不同,而且兩種光達資料的時間差 2 個多月,森林樹木會有許多變 化。其中差異較大的地方多出現在樹冠孔隙的位置(圖 5-6),最大可差到 10 公尺左右, 對於整體資料而言 Leica 光達系統中兩種點雲得到的標準偏差為 0.4。 (a). (b). (c). 6m. 一般光達之 DSM 網格點 圖 5-7. 全波形光達之 DSM 網格點. DSM 差異之比較圖:(a)DSM 差值圖;(b)DSM 差值統計直方圖; (c)為圈選處之放大圖及剖面圖. 樹冠高度模型利用 DSM 與 DEM 相減得到,兩種點雲在樹冠高度模型上的差異 如圖 5-8,其中較大的差異區域,受到所使用的 DEM 或 DSM 的影響,多出現在樹冠 孔隙及地形起伏較大的地方。就單一種光達系統來說,由兩種點雲資料在製作 CHM 上差異的情形與 DSM 相似,其平均差值在 10 公分內,而標準偏差則是 0.63 公尺。 顯示出利用同種光達系統,不同萃取方式得到的點雲在製作數值模型能有穩定的成果. 39.
(50) 。 (a). 圖 5-8. (b). CHM 差異之比較圖:(a) CHM 差值圖;(b) CHM 差值統計直方圖. 5.2.2 多種光達資料之分析 對以三種光達系統之多回波及全波形資料,A 及 B 實驗區皆可獲得六種點雲資 料,每種點雲資料所產製的 DEM、DSM 及 CHM 成果逐項列於本文附錄。六種點雲 資料所產製的 CHM 有些許之差異,CHM 網格點的平均值及標準偏差的分佈如圖 59,標準偏差之直方圖如圖 5-10。從圖 5-9 我們可以明顯的看出,在森林區的邊緣、 植生厚度差異較大的地方,標準偏差容易會有較大值產生。顯示出與製作 DSM 有類 似的差異現象。 (a). A區. (b). 40. B區.
(51) (c). (d). 圖 5-9. CHM 網格點的平均值(a)(b)及標準偏差(c)(d)的分佈圖(單位:公尺). A區. 圖 5-10. B區. 六種點雲資料產製之 CHM 標準偏差統計直方圖. CHM 的資訊除了可以用來推估森林中林木之樹高(圖 5-11),也可以用來計算森 林的樹體積。Lefsky(1999)提出樹體積的定義為包含樹本身的體積以及樹冠底下的空 間,相對於樹冠高度模型來說,樹體積可利用樹冠表面到地表的距離累積量來得到。 應用本研究中所製作之 CHM 來推估兩個實驗區整體範圍的樹林體積如表 5-4,整體 的標準偏差占整體體積的 2%~3%。顯示了用不同光達點雲製作出的 CHM,在森林樹 體積得推算上沒有太大的差異。. 41.
數據
+3
相關文件
In the past researches, all kinds of the clustering algorithms are proposed for dealing with high dimensional data in large data sets.. Nevertheless, almost all of
Unless prior permission in writing is given by the Commissioner of Police, you may not use the materials other than for your personal learning and in the course of your official
For the data sets used in this thesis we find that F-score performs well when the number of features is large, and for small data the two methods using the gradient of the
This study first explores the legal cases on the definition of wage from different agents, including administrative authorities, judicial authorities, and academic organizations..
In response to the variance in manufacturing execution systems and comprehensive customized business logic, this study develops an integrated, extensible, and sustainable
In the method, caching data are kept in three different version sets – current version set, new version set and invalid version set.. Further, we analyze the performance
This research sets different backgrounds as variables of consumers of Miaoli County residents and whether their different life styles and corporate social
This study discussed the pipelines of different materials, such as PVC pipes and steel pipes, with different water contents in different depths of standard sand (Ottawa sand), and
