行政院國家科學委員會專題研究計畫 成果報告
具狀態時延與時變干擾的非線性程序控制
計畫類別: 個別型計畫
計畫編號: NSC93-2214-E-011-009-
執行期間: 93 年 08 月 01 日至 94 年 07 月 31 日 執行單位: 國立臺灣科技大學化學工程系
計畫主持人: 周宜雄
計畫參與人員: 紀昆村
報告類型: 精簡報告
處理方式: 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢
中 華 民 國 94 年 11 月 3 日
Process Control of Nonlinear State-Delayed Systems with Time-Varying Uncertainties
Yi-Shyong Chou
∗& Kuen-Tsuen Jih Department of Chemical Engineering
National Taiwan University of Science & Technology (NSC93-2214-E-011-009)
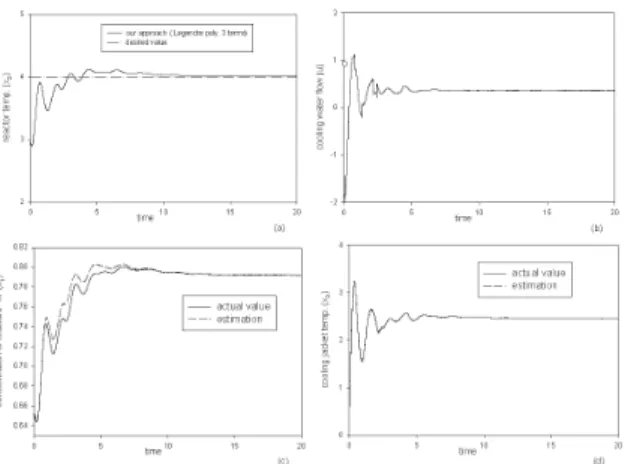
In this paper the problem of designing a tracking controller for uncertain nonlinear state- delay systems which can suppress the effects of both unknown uncertainties and disturbances is investigated. The controller is designed by using the sliding mode control concept and the polynomial approximation method. One of the features in this paper is that model uncertainties and state-delay terms are expressed as the Legendre polynomials expansion. The expansion coefficients of the Legendre polynomials can furthermore be modified by the update law derived from the Lyapunov stability theorem. The major advantage of the proposed control system design is to track a set-point without producing a vigorous control action and requiring the exact knowledge of model uncertainties. The control scheme is illustrated by an example of a chemical reactor with delayed states. Simulation results indicate that the proposed method can work for processes with time delays, in spite of unknown modeling uncertainties.
Keywords: uncertain nonlinear time-delay system, sliding mode control, chemical reactor con- trol
1. Introduction
Recently, control of nonlinear systems with unknown uncertainties has been of a challenging problem. Slo- tine and Coetsee (Slotine and Coetsee, 1986) proposed an adaptive sliding control to reduce the effect of un- certainties on the process for further improving perfor- mance by on-line parameter estimation algorithms. In their study, bounds of the unknown parameters did not need to be known. Huang and Kuo (Huang and Kuo, 2001) presented a sliding control scheme for nonlinear processes with unknown bound time-varying uncertain- ties. Those uncertainties were represented in finite-term Fourier functions. Vecchio et al. (Vecchio et al., 2002) developed a repeatable control design method for a class of feedback linearizable processes with an unknown non- linear function. They used the Fourier series to approxi- mate the nonlinear function of the process. In the above papers all uncertain elements appeared in the process were lumped and expanded in finite-term Fourier func- tions. This makes that we need choose a sufficiently large terms of Fourier functions to approximate uncer- tainties.
The aim of this paper is to design a sliding controller for nonlinear state-delay processes with time-varying un- certainties, despite unknown magnitudes on time delays and model uncertainties. The key idea of the paper is to use orthogonal polynomials to represent model un- certainties and delayed states. Due to the fact that the convergence of orthogonal polynomials is fast, only few terms of coefficients is needed to calculate. This allows us to improve the transient performance. Once the un-
known uncertainties and unknown state-delay terms have been approximated and parameterized, a feedback con- trol law and an update law for adjusting the parame- ters of orthogonal polynomials can be designed using the Lyapunov stability theory. The sliding mode con- trol structure is the backbone of the development of the proposed control strategy. The presented composite non- linear controller, which consists of a sliding model con- troller with a coefficient update law, can achieve offset- free performance. Furthermore, we discuss the stability of the closed-loop process. Finally effectiveness of the proposed method is demonstrated by illustrative simula- tions.
2. Problem Formulation
Consider a class of dynamic processes that may be modeled by
x
(n)= f
t(X(t), X(t − τ ))
+g
t(X(t), X(t − τ ))u(t) + d(t) (1) where X = £
x x
(1)· · · x
(n−1)¤
Tis the process state vector, f
tand g
tare nonlinear functions, τ > 0 is a delay time in the process state, u is the control input, and d is the disturbance. Generally, a large class of chemi- cal processes can be represented with this type of model structures. Examples are like recycled reactors, recycled storage tanks, cold rolling mills and so on (?). Most of the recycling processes inherit delays in their state equa- tions. Equation 1 also can be expressed in companion
1
form, i.e.
˙x
1= x
2˙x
2= x
3.. .
˙x
n= f
t(X(t), X(t − τ ))
+g
t(X(t), X(t − τ ))u(t) + d(t) (2) The control objective is to design a control law u(t) to make x(t) track x
d(t) in the presence of unknown mod- eling errors in f
t(X(t), X(x − τ )) and g
t(X(t), X(t − τ )) and unknown disturbances, d(t).
The sliding mode design approach consists of two components. The first involves the design of a switching function so that the sliding motion satisfies design spec- ifications. The second is concerned with the selection of a control law which will make the switching function attractive to the system state. Thus, the first step is to define a time-varying surface s(t) in the state-space as s(X; t) = 0 that is a differential operator acting on some error function
s = µ d
dt + λ
¶
n−1e(t) (3)
e(t) = x(t) − x
d(t) (4) where x
d(t) is the desired trajectory and λ is a strictly positive constant, determining the performance of the system on the sliding surface. The control goal is to force the process state x(t) to follow the specified tra- jectory x
d(t). The problem is equal to design a control law u(t) to ensure
t→∞
lim e(t) = 0 (5)
This condition can be achieved by requiring the system trajectory to converge to the sliding surface. Thus, the problem of tracking trajectory can be reduced to that of keeping s at zero.
µ d dt + λ
¶
n−1e(t) = 0 (6)
3 Controller Design
The first step in controller design is to select a feed- back control law u(t). The goal is to reach the slid- ing surface and to remain on it. The second step is to estimate unknown functions in f
t(X(t), X(t − τ )) and g
t(X(t), X(t − τ )) by employing orthogonal polynomi- als. Classical orthogonal polynomials serve as an ex- cellent tool for modeling processes in an approximative way. Here we select the Legendre polynomials in order to improve the accuracy of approximation of unknown functions.
Recall eq 3 s =
µ d dt + λ
¶
n−1e(t) (7)
The derivative of the sliding surface is calculated as fol- lows:
˙s = x
(n)− x
(n)d+ Ω(e) (8) where
Ω(e) =
n−1
X
k=1
(n − 1)!λ
n−k(n − k)!(k − 1)! e
(k)(9) Here we assume that the functions f
t(X(t), X(t − τ )) and g
t(X(t), X(t − τ )) can be represented as (?)
f
t(X(t), X(t − τ )) = f (X(t))
+∆f (X(t), X(t − τ ))(10) g
t(X(t), X(t − τ )) = g(X(t))
×∆g(X(t), X(t − τ ))(11) This assumption decomposes f
t(X(t), X(t − τ )) and g
t(X(t), X(t − τ )) respectively into two parts, where f (X(t)) and g(X(t)) are referred to as the known func- tions whereas ∆f (X(t), X(t−τ )) and ∆g(X(t), X(t−
τ )) can be viewed as the time-varying uncertainties which are unknown functions of time. Here ∆g(X(t), X(t − τ )) is in general referred to as the matched uncertainty, which is known to be bounded as below:
∆g
min≤ ∆g(X(t), X(t − τ )) ≤ ∆g
max(12)
∆f (X(t), X(t − τ )) can be viewed as the mismatched uncertainty.
With the aid of eqs 10 and 11, substituting eq 1 into eq 8 obtains
˙s = (f + ∆F ) + g∆gu − x
(n)d+ Ω(e) (13) where ∆F = ∆f + d. In order to make the value of ˙s equal to zero, we consider the following control input of the form
u = 1
g h
− ∆ ˆ H
−∆ˆ g
−1(f − x
(n)d+ Ω(e)) − ηsat( s φ )
i (14) The thickness of the boundary layer φ is defined to be a positive real scalar. Outside the boundary layer, |s| ≥ φ, the sliding condition will be used to specify the s dynam- ics. Inside the boundary layer, |s| < φ, the control law will be modified to impose a smoothing process to the s dynamics. The tuning gain η is a strictly positive con- stant, ∆ ˆ H and ∆ˆ g
−1are the estimates of the unknown functions ∆F ∆g
−1and ∆g
−1, respectively. The sat is the saturation function
sat ³ s φ
´
=
½
sφ
if |
sφ| < 1
sgn(
φs) if |
sφ| ≥ 1 (15)
sgn ³ s φ
´
=
½ +1 if
φs> 0
-1 if
φs< 0 (16)
Substituting eq 14 into eq 13 gives
˙s = ∆g h
(f − x
(n)d+ Ω(e))(∆g
−1− ∆ˆ g
−1) +(∆H − ∆ ˆ H) − ηsat( s
φ ) i
(17) where
∆H = ∆F ∆g
−1(18)
Assume that ∆H and ∆g
−1are unknown bounded func- tions and can be approximated as
∆H ≈ W
HTz
F(t) (19)
∆g
−1≈ W
gTz
F(t) (20) where
z
F(t) = £
P
0(t) P
1(t) · · · P
n(t) ¤
T(21) W
H= £
w
H0w
H1· · · w
Hn¤
T(22) W
g= £
w
g0w
g1· · · w
gn¤
T(23) Here z
Fis the Legendre polynomials vector, W
Hand W
gare the parameter vectors and considered as constant vectors. Generally the number n should be properly se- lected so that the approximate errors are tolerable. ∆ ˆ H and ∆ˆ g
−1are the estimates of the unknown functions
∆H and ∆g
−1, respectively, and can be represented as
∆ ˆ H ≈ W ˆ
HTz
F(t) (24)
∆ˆ g
−1≈ W ˆ
gTz
F(t) (25) where
W ˆ
H= £ ˆ
w
H0w ˆ
H1· · · w ˆ
Hn¤
T(26) W ˆ
g= £
ˆ
w
g0w ˆ
g1· · · w ˆ
gn¤
T(27) The update laws for adjusting the parameters ˆ W
Hand W ˆ
gwill be derived.
Substituting eqs 19 to 27 into eq 17 yields
˙s = ∆g h
(f − x
(n)d+ Ω(e))( ˜ W
gTz
F(t)) + ˜ W
HTz
F(t) − ηsat( s
φ ) i
(28) where
W ˜
H= W
H− ˆ W
H(29) W ˜
g= W
g− ˆ W
g(30) Consider the Lyapunov function candidate as
V = 1
2 s
2+ 1 2 ∆g h
W ˜
HTQ
HW ˜
H+ ˜ W
gTQ
gW ˜
gi (31) where Q
Hand Q
gare symmetric positive definite matri- ces. The derivative of V along the trajectory is
V ˙ = s ˙s + ∆g
h W ˜
HTQ
HW ˜ ˙
H+ ˜ W
gTQ
gW ˜ ˙
gi
(32)
Since W
Hand W
gare the constant vectors, W ˜ ˙
H= − ˙ W ˆ
Hand W ˜ ˙
g= − ˙ W ˆ
g, the above equation can be further ex- pressed as
V ˙ = s ˙s + ∆g
h W ˜
HTQ
H(− ˙ W ˆ
H)
+ ˜ W
gTQ
g(− ˙ W ˆ
g) i
(33) Substituting eq 28 into 33 and considering within the boundary layer, we obtain
V ˙ = ∆g h
W ˜
gT(z
Fs(f − x
(n)d+ Ω(e)) − Q
gW ˆ ˙
g)
+ ˜ W
HT(z
Fs − Q
HW ˆ ˙
H) − η s
2φ i
(34) Choose the update laws as
ˆ ˙
W
g= Q
−1gz
Fs(f − x
(n)d+ Ω(e)) (35) ˆ ˙
W
H= Q
−1Hz
Fs (36)
then the derivative of V becomes V ˙ = −∆gη s
2φ (37)
Choose η = |
∆gη1max