行政院國家科學委員會專題研究計畫 成果報告
風險條件下重複性排程最適化模式之探討-以推進工程為對 象(第 3 年)
研究成果報告(完整版)
計 畫 類 別 : 個別型
計 畫 編 號 : NSC 98-2221-E-011-136-MY3
執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立臺灣科技大學營建工程系
計 畫 主 持 人 : 呂守陞
計畫參與人員: 碩士班研究生-兼任助理人員:溫佩樺 博士班研究生-兼任助理人員:Joko
報 告 附 件 : 出席國際會議研究心得報告及發表論文
公 開 資 訊 : 本計畫可公開查詢
中 華 民 國 101 年 09 月 13 日
中 文 摘 要 : 下水道建設能帶給人們更好之生活品質,且能減低對環境之 污染,因此其為城市現代化程度指標之一,不過我國因下水 道建設起步較晚,與多數國家相比,普及率仍遠遠落後。故 政府近年來即積極推動下水道工程建設,並投入大量之經 費,但工程建設速度仍舊呈現緩慢成長趨勢,因此要如何提 昇下水道推進工程之生產力即變成當下急需解決之問題。
目前下水道推進工程所採用之機具,大多皆為國外進口,且 受限於成本與法令考量,廠商對於推進機具之引進亦不完 全,對於未引進機具部份之施工方法與人員配置,則自行採 取相關替代方式,其施工方式或人員配置是否正確,仍有待 考驗。因此,本研究將針對現行推進作業流程進行相關探 討,重新檢視施工流程,並利用電腦模擬與再造工程技術,
規劃出最適化之作業人力配置與施工作業流程,提供給予下 水道從業廠商做為施工之參考。
更且,推進為下水道工程之關鍵作業,為了要符合實際工程 上機具在開挖時有可能遇到不適合的地質等異況而造成無法 推進或破壞的可能,且不同異況處置所需成本也不同,並鑑 於下水道推進工程之地質狀況是影響機組選擇的重要因素,
故期能於初期規劃時,考慮施工位址地質狀況之不確定性 (uncertainty)因素及在異常狀況下能夠正常運作的風險,藉 由模擬分析其推進機組推力及掘削速率於異常狀況下所的風 險,以降低在不確定地質狀況下可能發生異況的風險及降低 成本之目的。
中文關鍵詞: 推進工法、流程再造、電腦模擬、風險最佳化、推進機具 英 文 摘 要 : Sewage infrastructure systems can bring citizens a
better living quality and also reduce the
environmental pollution. It is one of the indicators of urban modernization. In Taiwan, most of the
machines used in sewage pipe jacking construction are imported from foreign countries. Because of economic and legal concerns, the complete machines are
generally imported. As a result, contractors should come up with alternative supplementary methods with imported machines. This study investigated the current pipe jacking operations, reviewed the
engineering process, and used computer simulation and reengineering techniques to design an optimal
allocation of human resources and operating process.
Furthermore, the pipe excavation is the key of the
pipe jacking construction. However, the uncertain geological conditions in the excavation cause jacking failures. The additional costs and the schedule delay will occur. This study aims to investigate the
machine selection under the condition of uncertain geological conditions at the planning stage. This study uses simulation optimization analysis method to estimate the risk of machine thrust and penetration rate under unexpected conditions. The proposed method may help contractors to select appropriate pipe-
jacking machines under unexpected geological conditions.
英文關鍵詞: Pipe Jacking, Re-Engineering, Computer Simulation, Risk Optimization, Machine Selection
行政院國家科學委員會補助專題研究計畫
□ 成 果 報 告□期中進度報告
(計畫名稱)
風險條件下重複性排程最適化模式之探討-以推進工程為 對象 (3/3)
計畫類別:□ 個別型計畫 □ 整合型計畫 計畫編號:NSC98-2221-E-011-136-MY3
執行期間: 98 年 08 月 01 日 至 101 年 07 月 31 日 計畫主持人:呂守陞
共同主持人:
計畫參與人員:Joko、溫佩樺、Ludy
成果報告類型(依經費核定清單規定繳交):□精簡報告■完整報告
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
□出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
處理方式:除產學合作研究計畫、提升產業技術及人才培育研究 計畫、列管計畫及下列情形者外,得立即公開查詢 ■ 涉及專利或其他智慧財產權,□一年■二年後可公開 查詢
執行單位:國立台灣科技大學 營建工程系 中 華 民 國 101 年 08 月 31 日
第一章 緒論
隨著台灣都市化程度愈來愈高,為了都市的環境景觀、路權之 取得、避免造成用路人之不便、保持交通順暢、減少噪音及避免降低 生活品質等等,許多地區已無法採取傳統的明挖式施工方法,而必需 以所謂的免開挖工法取而代之。營建工程專案之種類眾多,然依據作 業之循環性之特性,可區分為重複性與非重複性工程。所謂重複性工 程包含若干典型作業重複循環作業,以推進工程為例,由工作井施 築、推進工作(包括測量、機頭掘進、推進管下井、機頭掘進、出土、
注入材注入等等)、到達井工程等循環性作業。一般進行重複性工程 之作業安排多利用傳統排程技術,如線性平衡(Line of balance);透過 基本工率等假定資料,再配合施工面之安排,以建立施工作業流程。
然營建工程面對外在因素之影響,如地質、天候、資源限制與否等,
將使得傳統線性排程之手法,無法全然反應這些因素影響之排程成 果,且致資源調度等方面產生閒置等不良之後果。
更且,執行重複性作時常常面臨許多充滿不確定性的影響因子,
可能造成進度落後、成本超支等影響。營建工程中所需要考量的影響 因素包含:地質條件、天氣狀態、勞力狀況、材料、機具調度等等項 目;其中,對推進施工作業而言,地質狀況以及開挖條件更是重要的 影響因子。台灣地處歐亞板塊與菲律賓板塊交界區,地質條件脆弱,
土木與建築工程受到地質因素的影響相對提高,若無法確定地質型 態,將造成施工作業延宕,影響預定進度,造成成本上的損失。
因此,考量不確定性影響因子所可能造成之進度風險,進之進行 資源最適化調度,以避免因意外而造成的作業延遲甚至損失,則是推 進工程單位著重的目標。為了確保進度預測能夠達到準確,對各工程 進行規劃與評估時,應考量不同的影響因素影響下各設施系統與單元
之相關性與可能造成的風險,使得進度的控制與預測能夠在準確的範 圍之內;再據此擬定有效的施工環境預測機制並導入施工排程最適化 系統,減少各種可能造成之損失,為本研究之主要課程。本研究擬 建立有效評估風險條件的施工環境預測機制並導入重複性施工排程 最適化系統,對重複性工期工程進行預測以及回饋,透過流程最適 化模式並結合地質預測模型,經由地質風險預測提供排程訂定決 策,有效的傳遞與分享進而改善施工流程的效率與決策的品質。
依據上述之整體架構,推進工程作業生產力乃是最適化排程模式 之關鍵資料,故本階段擬針對國內常用之推進機具,進行相關生產力 調查與流程再造之探討。目前下水道推進機具出口國主要有二,分別 為日本與德國,受限於成本與法令規範考量,機具進口國往往無法引 進完整之下水道推進設備,使得下水道施工流程與廠商建議有所出 入。對於未引進機具部份之施工方法與人員配置,則自行採取相關替 代方式,其施工方式或人員配置是否正確,仍有待考驗。因此,本研 究以台灣地區為例,針對現行推進作業流程進行相關探討,重新檢視 施工流程,並利用電腦模擬與再造工程技術,規劃出最適化之作業人 力配置與施工作業流程,提供給予下水道從業廠商做為施工之參考。
1.1 研究動機與目的
下水道建設之興建程序,通常是由主幹管先行施建,再擴展延伸 至分(支)管網,最後則接至用戶端。現行台灣下水道建設己推行多 年,其中主幹管大多已鋪設完成,使得下水道工程建設重點己從主幹 管工程移轉至支幹管與分管網興建工程上,由於支(分)幹管之服務區 域較小與人口數量較低之原因,其管徑大多在 800mm 以下,因此只 能使用小管推進工法進行施工。而小管推進因受限於口徑狹小之原 因,施工人員無法於管內進行作業,所有控制都必須在地面上進行,
故其自動化程度與技術層次都較高。然受限於成本與法令規範考量,
機具進口國往往無法引進完整之下水道推進設備,使得下水道施工流 程與廠商建議有所出入。對於未引進機具部份之施工方法與人員配 置,則自行採取相關替代方式,其施工方式或人員配置是否正確,仍 有待考驗。
有鑑於此,擬針對目前國內常使用之下水道推進工程之作業流 程與生產力等進行探討。本研究將系統性收集與分析推進工程在不同 地質條件與施工環境下之生產力數據,及面對施工困難時之成因與對 策。依據本研究之推進工程數據,並配合上階段地質預測模式,下一 階段之研究將發展推進工程在風險條件下重複性排程最適化模式。
更且,免開挖工法之施工方式又以地下推進作業為主軸,但至今 對於推進過程中推進阻力之探討於實務上仍尚未與理論分析結合,故 相關管線設計長度及推進機組之選擇仍多憑施工人員之經驗為之,因 此在地質與環境等不確定之條件下,無法具體評估相關之影響與衝 擊。為落實國家推動下水道普及化之政策,且鑑於免開挖工程之地質 狀況是影響推進機組型式選擇的重要不確定性因素,因此為了避免選 用設備不適合地質或遭遇卵礫石層等所造成嚴重的方向偏差,甚至延 宕推進時程帶來的影響,故本研究蒐集下水道推進機組之記錄資料,
並對其風險進行量化,期望建立一客觀推進機組評選模式。
1.2 研究範圍與內容
為改善推進工程之作業流程,本研究選用電腦模擬技術進行施工 流程再造工作。一般而言,營建作業之程序是非常難用單一數學型式 去表示,並進行優化動作。因此,本研究以電腦模擬方式,進行流程 模型之建立,利用EZStrobe模擬程式之圖形化建模功能,進行模型建 立,以輔助進行作業掃描。依據推進工程之作業資源架構,本研究進
行相關流程模擬與再造分析。依據流程再造評估,目前推進工程之作 業流程與資源配置,可透過再造評估,可獲取更有效的施工流程。
更且,國內地下機械式掘進工程日增,如引水或山岳隧道、都會 捷運、污水下水道等,在台灣山多平地少的地形特徵與複雜多變的地 質狀況下施工,或多或少均遭遇到諸多掘削不力之工程困境;回顧以 往免開挖工程因於地層中施工,不確定因素較地面工程高,發生負面 問題較多,如地表沈陷災害或掘削不利(潛盾工程)及推力不足、中繼 加壓站設計距離不當或於高水壓地層施工發生管材後推現象(管推工 程)等,其皆與工程掘進之推進力系有相對關係。
本研究將針對推進作業進行研究,於施工管理角度而言其影響掘 削進度之因子眾多,包括推進力系之推力與扭力,但因業界施工中,
將扭力設為定值施工,變化較為穩定,而推力隨施工速率變動(趕工、
工程進度控管),較為工程人員注重,因此我們將以推力及掘削速率 (生產力)並考慮地質狀況作為選擇推進機組之參數分析,另有關整體 切削面盤之配置考量則不包含於本研究內(如圖 1.1)。
圖1.1 研究範圍與內容 1.3 研究方法與步驟
基本上,本研究首先利用EZStrobe模擬程式之圖形化建模功能,
進行下水道推進整體模型之建立。依據推進工程之作業資源架構,本 研究進行相關流程模擬與再造分析。依據流程再造評估,目前推進工 程之作業流程與資源配置,可透過再造評估,可獲取更有效的施工流 程。
進一步本研究擬利用模擬技術(simulation methods)建立之數值模 型,為考慮地質狀況之不確定性因素,以及實務推進之記錄資料,利 用Matlab套裝軟體撰寫電腦程式並以多變數常態隨機模擬法對其風 險進行量化,而後以電腦模擬評估出最適之推進機組。
第二章 文獻回顧
本研究主要目的在研究下水道推進整體流程模擬與再造,以及於 免開挖工程之規劃初期考慮影響推進機組型式選擇的重要不確定之 地質狀況因素,因此將藉由多變數常態隨機模擬法對其不確定因素進 行風險之量化,以協助決策者分析掌握系統的特性並以電腦模擬之方 法評選出最適之推進機組。因此本章節由文獻回顧彙整下水道推進作 業與相關研究工具。
2.1 流程再造
再造(reengineering)一詞從廣義來說,是將原來觀念、制度或流 程,重新進行檢視,並改善其缺失。Hammer 於 1990 年曾對流程再 造進行更為明確的定義,謂之「利用現代科技技術,改善公司的商務 流程,使其有戲劇性的變化」;另於 1993 年出版之「改造企業-確保 改造成功的指導原則」一書中,進一步的定義流程再造為「根本的重 新思考,徹底翻新作業流程,以求在企業表現上,獲得大躍進式的改 善」。流程再造之步驟分別為「流程重現、流程轉換、流程評估與設 計流程」,利用上述步驟重新塑化流程,檢視並重新規劃設計,以改 善流程之缺失。
流程再造的基本內涵是利用近代科技技術,找出公司之缺失,並 提出改善方案,使公司能發揮較大之效能回饋至生產成本、生產品質 與生產效率上;營建業使用之流程再造模式如下圖2.1 所示。
圖2.1 營建業流程再造模式[鄭明淵、蔡明修,2008]
流程再造之概念逐漸延伸至營建產業,例如潤泰建設進行內部組 織再造,整合利潤中心運作管理模式,將產品生產線經由流程重現、
轉換、評估後,導入 RFID 於倉儲和出貨盤點、PDA 裝置整合 ERP 系統等電子自動化系統,藉以提高生產線效率。流程再造於營建產業 相關文獻整理如表2.1 所示。
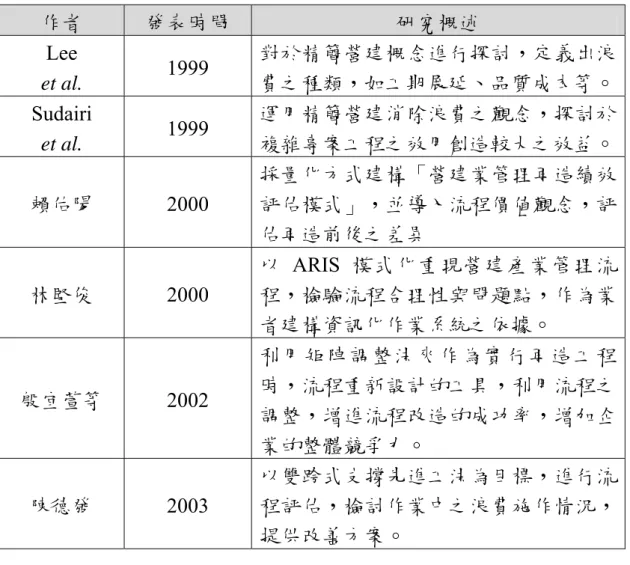
表2.1 流程再造於營建產業相關文獻
作者 發表時間 研究概述
Lee
et al.
1999 對於精簡營建概念進行探討,定義出浪費之種類,如工期展延、品質成本等。
Sudairi
et al.
1999 運用精簡營建消除浪費之觀念,探討於複雜專案工程之效用創造較大之效益。
賴佑陽 2000
採量化方式建構「營建業管理再造績效 評估模式」,並導入流程價值觀念,評 估再造前後之差異
林堅俊 2000
以 ARIS 模式化重現營建產業管理流 程,檢驗流程合理性與問題點,作為業 者建構資訊化作業系統之依據。
殷宜萱等 2002
利用矩陣調整法來作為實行再造工程 時,流程重新設計的工具,利用流程之 調整,增進流程改造的成功率,增加企 業的整體競爭力。
陳德發 2003
以雙跨式支撐先進工法為目標,進行流 程評估,檢討作業中之浪費施作情況,
提供改善方案。
2.2 營建業流程模擬與最佳化方法 2.2.1 營建流程模擬
電腦模擬技術對於營建產業複雜的流程係一有用的工具,凡舉工 期排程、成本預算、人力資源與作業規劃,都能經由電腦模擬方式事 先瞭解專案規劃與施工問題。
一般電腦模擬,其作用在於「模仿」真實系統運作方式,建構真 實世界的模型做其分析,模型可以是抽象的數學模式、邏輯關係式,
或進一步以圖像或 3D 立體圖來顯示施作狀況[蔡雅雯,2002]。早期 模擬程式,期開發與運用之目的大多是為了滿足傳統製造業而非營建 業,因此無法有效的以程式語言模擬複雜的營建作業[Martinez and
Ioannou, 1996]。在 1973 年,Halpin 教授開發出 CYCLONE (Cyclic Operations Network) 後已解決,CYCLONE 是第一個專為營建作業 開發出之模擬程式,使用者可以預知整個作業的產率,以便準確地達 到預期的目標或工期[Halpin, 1992]。CYCLONE 是利用六個建模元 件,建構營建業作業流程之模型,且因其建模方式簡單,故被廣泛採 用[Huang, 2004]。
自CYCLONE 推出以來經歷 30 餘年的發展與應用,延伸出許多 以 CYCLONE 理論為基礎之模擬程式,普遍應用於營建工程實務與 學術研究上,可分類為四大骨幹,如下所示:
一、史丹佛大學 (Stanford University)
INSIGHT、INTERGRATION、MICRO- INSIGHT 二、密西根大學 (University of Michigan)
RESQUE 、 UMCYCLONE 、 COOPS 、 STROBOSCOPE 、 EZStrobe
三、普渡大學 (Purdue University)
INSIGHT、INTERGRATION、MICRO- INSIGHT 四、朝陽科技大學 (Chaoyang University of Technology)
COST
營建業流程模擬方法能協助工程規劃人員快速檢視作業內容,發 現流程缺失,提出改善方案,進而提升營建施工效率。許多國內外專 家學者投入此方面研究,相關應用文獻如下表2.2 所示。
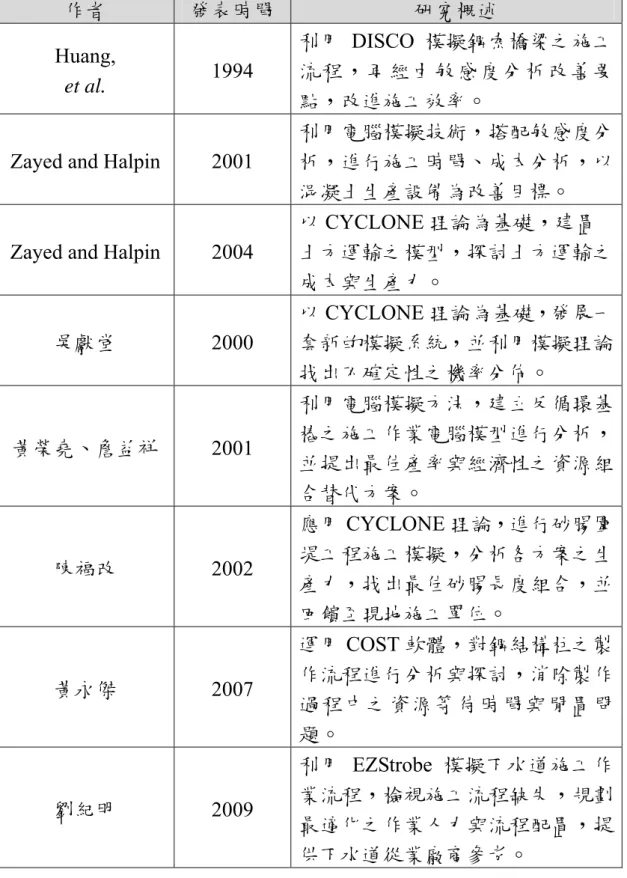
表2.2 營建業流程模擬相關應用文獻
作者 發表時間 研究概述
Huang,
et al.
1994利用 DISCO 模擬鋼索橋梁之施工 流程,再經由敏感度分析改善要 點,改進施工效率。
Zayed and Halpin 2001
利用電腦模擬技術,搭配敏感度分 析,進行施工時間、成本分析,以 混凝土生產設備為改善目標。
Zayed and Halpin 2004
以CYCLONE 理論為基礎,建置 土方運輸之模型,探討土方運輸之 成本與生產力。
吳獻堂 2000
以CYCLONE 理論為基礎,發展一 套新的模擬系統,並利用模擬理論 找出不確定性之機率分佈。
黃榮堯、詹益祥 2001
利用電腦模擬方法,建立反循環基 樁之施工作業電腦模型進行分析,
並提出最佳產率與經濟性之資源組 合替代方案。
陳福改 2002
應用 CYCLONE 理論,進行砂腸圍 堤工程施工模擬,分析各方案之生 產力,找出最佳砂腸長度組合,並 回饋至現地施工單位。
黃永傑 2007
運用 COST 軟體,對鋼結構柱之製 作流程進行分析與探討,消除製作 過程中之資源等待時間與閒置問 題。
劉紀明 2009
利用 EZStrobe 模擬下水道施工作 業流程,檢視施工流程缺失,規劃 最適化之作業人力與流程配置,提 供下水道從業廠商參考。
2.2.2 模擬最佳化
模擬最佳化(simulation optimization),或稱隨機最佳化(stochastic
optimization),就是針對一隨機模擬(stochastic simulations)模式輸出結 果的績效量測為最佳化[Fu, 2001],即為提供了一結構化的方法透過 模擬模式輸出結果績效量測為最佳化時,來找出一組最佳的輸入參數 值[Swisher, 2000],因此模擬最佳化目標是希望在一個模擬實驗中極 大化可獲得的相關訊息但卻使得所耗用的資源為最小。[Carson and Maria, 1997]
表2.3彙整目前在模擬最佳化之研究成果。大多數文獻對模擬最佳 化 都 是 依 照 其 目 標 函 數 的 決 策 變 數( 輸 入 參 數 ) 來 分 類 [Swisher, 2000、Azadivar, 1999],因為決策變數不是屬於連續型(continuous)的 就是離散型(discrete)的,為了簡化分類的型式,假設所有的決策變數 不是全都是連續型的,不然就全都是離散型的,其中離散型又可因決 策變數的可行解區域(feasible region)分成有限空間及無限空間,因此 共分成三類。由於不同型態的決策變數所使用的最佳化方法迥異,因 此在選擇模擬最佳化方法之前,必須先確認決策變數是哪一類型的,
之後再針對問題及目標函數的特性,選擇一適用的方法,才可得到正 確且滿意的解。在此將這些應用在不同型態決策變數之方法加以分類 [Fu, 2001]。
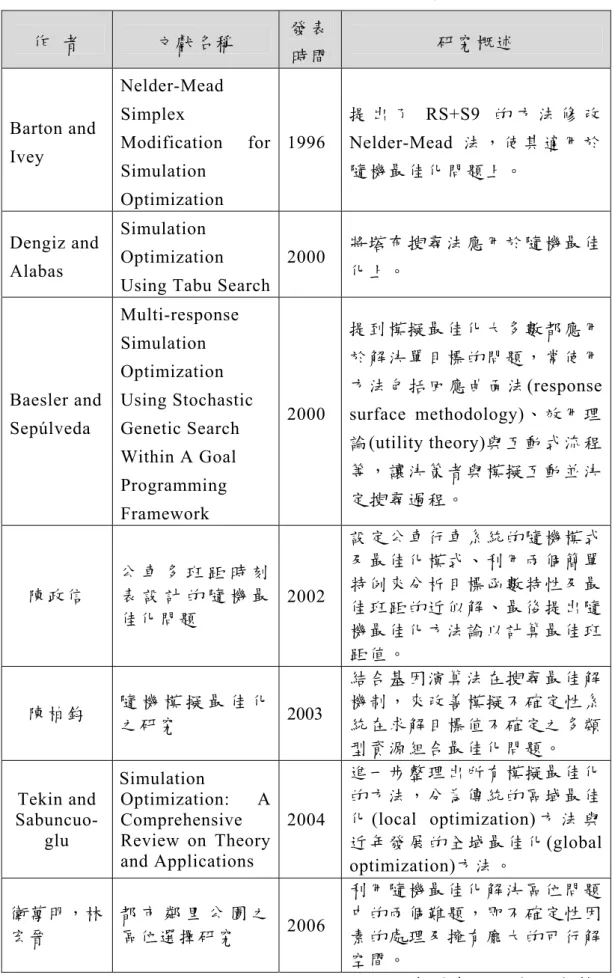
表2.3 模擬最佳化應用之相關文獻表
作 者 文獻名稱 發表
時間 研究概述
Barton and Ivey
Nelder-Mead Simplex
Modification for Simulation
Optimization
1996
提 出 了 RS+S9 的 方 法 修 改 Nelder-Mead 法,使其適用於 隨機最佳化問題上。
Dengiz and Alabas
Simulation Optimization Using Tabu Search
2000 將塔布搜尋法應用於隨機最佳 化上。
Baesler and Sepúlveda
Multi-response Simulation Optimization Using Stochastic Genetic Search Within A Goal Programming Framework
2000
提到模擬最佳化大多數都應用 於解決單目標的問題,常使用 方 法 包 括 回 應 曲 面 法(response surface methodology)、效用理 論(utility theory)與互動式流程 等,讓決策者與模擬互動並決 定搜尋過程。
陳政信
公 車 多 班 距 時 刻 表 設 計 的 隨 機 最 佳化問題
2002
設定公車行車系統的隨機模式 及最佳化模式、利用兩個簡單 特例來分析目標函數特性及最 佳班距的近似解、最後提出隨 機最佳化方法論以計算最佳班 距值。
陳柏鈞 隨 機 模 擬 最 佳 化
之研究 2003
結合基因演算法在搜尋最佳解 機制,來改善模擬不確定性系 統在求解目標值不確定之多類 型資源組合最佳化問題。
Tekin and Sabuncuo- glu
Simulation
Optimization: A Comprehensive
Review on Theory and Applications
2004
進一步整理出所有模擬最佳化 的方法,分為傳統的區域最佳 化(local optimization) 方 法 與 近年發展的全域最佳化(global optimization)方法。
衛萬明,林 宏晉
都 市 鄰 里 公 園 之
區位選擇研究 2006
利用隨機最佳化解決區位問題 中的兩個難題,即不確定性因 素的處理及擁有龐大的可行解 空間。
資料來源:本研究整理
2.3 結語
綜合上述文獻回顧得知,流程再造需透過系統性分析:流程重 現、流程轉換、流程評估、與流程再造,進行流程改造。本研究擬以 生產力為績效指標,評估下水道施工績效與改造重點。因此如欲改善 現行下水道施工作業流程,提高生產力,可應用流程再造與精簡營建 之概念重新進行檢討,再藉由合併、精簡作業流程之手段,搭配妥善 之機具排控程序與人員工作安排,最後以電腦模擬技術進行方案之驗 證,相信應可有效的減低流程中之浪費,提高作業生產效率。
由於下水道推進為關鍵作業,其中免開挖工程之地質狀況是影響 推進機組型式選擇的重要不確定性因素,因此為了避免選用設備不適 合地質或遭遇卵礫石層等所造成嚴重的方向偏差,甚至延宕推進時程 帶來的影響,故本研究蒐集下水道推進機組之記錄資料,並對其風險 進行量化,期望建立一客觀推進機組評選模式。
第三章 研究方法之探討與應用
本研究之整體架構如圖1.1所示。依據研究架構與需求,本章首先 概述免開挖工程之類型與施工流程,而後探討整體下水道推進流程之 模擬與流程再造,進一步在風險條件下推進工法機組評選之數值模式 計算中所運用的重要理論方法,分述如下:首先為本研究模式之分析 方法,而後為採用異常狀況之範圍,其次為不確定性之地質狀況之預 測,最後以多變數常態隨機模擬法對不確定因素評估其風險,提供決 策者評選最適之推進機組(如圖3.1所示)。
圖3.1 地質風險下推進機具評選模式 3.1 免開挖工程
隨著都市快速發展,人口密度增高,舊有的各種民生事業及公共 設施如道路、公園綠地、學校、市場、污水處理廠及停車場等大多已 不敷使用,且因都市環境景觀及環境保護日受重視,對交通障礙、噪 音、振動、公害及環境污染之要求日趨嚴格,因此地面上的空間更已 不容許恣意奢侈地運用,故公用設施用地急需闢建,以促進都市的合
理發展,提昇人民生活品質[林昭洲,2004]。因此,舉凡自來水、下 水道、電信、電力、瓦斯、石油、天然氣等民生必須之公共設施管道 均需充分利用共同空間,以發揮多元化的機能。
現今由於掘進機械之不斷研發改良,施工經驗之累積,以及電子 監控系統之引用,其施工技術日益精進,施工精度、安全性、經濟性 日漸提高,適用範圍亦不斷普及,因此舉凡受施工條件,施工環境限 制之都市下水道、自來水、電信電纜等地下管渠之埋設,不論管徑之 大小,均已有以免開挖工程如推進工法或潛盾工法取代明挖施工 (open cut method)之趨勢(如圖 3.2)。
圖 3.2 免開挖工程類型 3.1.1 推進工法
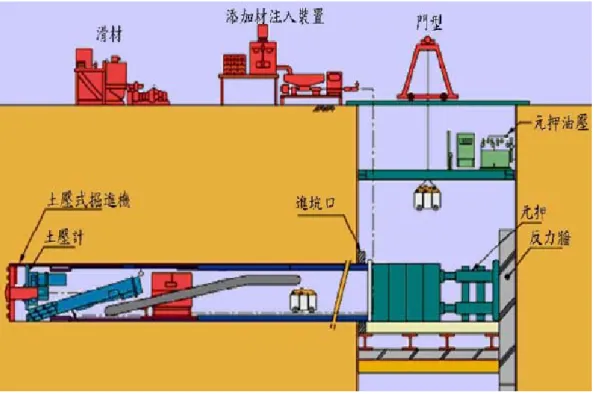
依據日本勞動省有關管道內作業的安全規定,推進工法(pipe jacking method)又可依口徑大小分為中大口徑推進工法與小口徑推進 工法,一般是以水泥管徑800 mm(內徑)為分界,800 mm以上(含800 mm)口徑;一般認為人員可以在管內進行推進施工作業,稱為中大口 徑,而700 mm以下(含700 mm)則人員不可以進入管內作業,稱為小 口徑(如圖3.3)。此工法係於埋設管線之兩端,構築與埋管深度相同之
推進工作井及到達工作井,並於推進工作井後壁構築反力牆,再進行 推管作業(如圖3.4~5)。
圖3.2 推進工法類型
圖3.4-1 推進工法示意圖(泥水式)
圖3.4-2 推進工法示意圖(土壓式)
圖3.4-3 推進工法示意圖(泥濃式)
圖3.5 推進工法施工步驟 3.1.2 潛盾工法
潛盾工法(shield method)為法人 Marc Izambered Brunnel 所發明,
於 1825 年首先應用於英國泰晤士河底隧道工程,施工迄今已有 180 年之歷史,目前已廣泛使用於地下鐵路、下水道、自來水及地下電纜 等地下管線之施工。
潛盾工法係利用鋼板作為外殼,其內裝備油壓千斤頂、油壓機及 各種操作機械所組合而成之潛盾機在地下,一面挖掘前進,一面架設 弓形支保(segment)支持土壓,必要時於架設完成之弓形支保內側灌注 混凝土作為襯砌,並於弓形支架之外側注入水泥漿成藥液,以形成管 道之施工法(如圖 3.6~7)。
鑑於在軟弱地盤中,若採傳統隧道開挖工法施工,不僅面臨需要 採用大量密佈臨時支撐,施做重複架設與拆除之缺點,且隨時有發生
危險之虞,更因挖掘與襯砌工作彼此等待,相互干擾導致施工進度緩 慢,造價提高,若能使用潛盾施工法,不但可節省費用並免除佔據巨 大支撐作業空間,且可使隧道施工得以安全迅速的向前掘進。是故在 地質愈惡劣,使用一般隧道開挖愈困難之工程,採用潛盾工法施工愈 安全、可靠。潛盾工法在地面下水位高、軟弱土質挖掘隧道是一種較 佳的施工方法。[林昭洲,2004]
圖 3.3 潛盾工法施工示意圖
圖3.7 潛盾工法施工步驟 3.1.3 異常狀況
在進行推進施工時常發生各種突發狀況,例如機具磨損、地質狀 況複雜及新進施工人員對機具操作熟練度等而導致施工無法順利進 行,此時就有賴施工者能因地制宜,利用本身之專業知識及對機具之 了解克服施工困難(如表3.1)。雖然如此,大部分推進之突發狀況之發 生乃是因為之前調查及設計規劃未盡完善,而導致施工時不如預期,
故確實執行施工管理中所提到之施工要點才能將突發狀況之發生降 至最低。
表3.1 推進遭遇無法推進異常狀況之分類列表 突發狀況
之分類 推進突發狀況 無法推進狀況 因應對策
推力不足 推進中,機頭前進之動力為元押及中押千斤頂,若推力不足則無法推進 更換適當之機具 機械故障 切削面盤、推進機或是排土等裝置因性能不佳導致故障 勤做維修保養 反力牆反力不足 反力之反力不足原因是因為該處之地盤強度不夠,無法提供足夠反力 進行地盤改良
推進遇障礙物 推進若遭遇像是流木、管線或是構造物等障礙物,導致機頭無法前進 開臨時豎坑、用人工從機頭前端 取出、搗碎強行通過
地質互層使機頭 無法前進
各種不同土層都有對應之適用機頭,機頭之不適用將導致推進效率過慢
或是無法推進 使用地盤改良
機頭沉陷 推進機頭有時因處在軟落地層中,或是因上述原因而無法前進時,本身
便會因自身之重量而沉陷 使用地盤改良或開臨時豎坑挖掘
機頭滾轉 推進機頭發生滾轉知因乃是未扭力之不足,導致切削盤無法正常運轉,
而帶動機頭之管轉,若情況持續進行則會破壞已建立之管道 利用操作技巧及滑材穩定 遭遇大卵石
推進進行前,先做地質鑽探,但會因採樣誤差或採樣試管管徑限制,而 誤判地層情況,使推進機頭選擇錯誤,導致機頭無法破碎大卵石或機頭 選擇正確,仍無法正常推進之情形
可用灌漿方式固定卵石,以利掘 進機掘進
推進過程遭 遇基樁
因未做好地下管線及構造物調查,使得規劃設計推進路線時,未避開基 樁或構造物
進行基礎補強措施,以明挖方式 將基樁打除或以掘進機掘削通過 無法推進
推進機頭受 困於挖掘面
掘進過程中,發生機頭因地層狀況改變或阻力增大,使機頭無法卡於掘 削面,無法前進
調整掘進機衝程,使挖掘面與機 頭保有一定距離之空隙,使機具 得以運轉
資料來源:[本研究彙整]
表3.1 推進遭遇無法推進異常狀況之分類列表(續)
突發狀況
之分類 推進突發狀況 無法推進狀況 因應對策
掘 削 面 附 近 地 層崩落
蛇行發生之主因主要是地層之崩落,如地下土層或是水壓之改變、泥水 溢流、注入材之管理不佳、過度挖掘等等
選擇適用機頭、進行地盤改良及妥 善監測施工數據
管 線 埋 設 坡 度 過大
當推進坡度過大時,會影響機頭之方向操挖,容易產生偏離,造成出坑 時的誤差量
設計時,盡量將坡度控制在1.5%以 下,或由地下水位低處往高處施工 人為操作因素 由於操作手對切削面盤及掘進機械特性不熟悉,或是對推進設備之操作
疏忽導致推進過快,使軸方向產生偏心而導致蛇行 加強教育訓練提升素質
遭遇地質互層
由於各種不同土層都有對應之適用機頭,機頭之不適用將導致推進效率 過慢、無法推進或是機頭沉陷而導致蛇行。在實際施工上同一個推進段 落並非完全都是單一土層,故須有妥善之應對
選擇適用機頭並進行地盤改良
反力牆之偏差 反力牆在製作時沒有和推進方向形成直角,導致推進時受力不均而偏差 利用千斤頂之操作盡量推進 管線蛇行
測量上的誤差 因測量誤差導致推進路線偏移 增加測量頻率及使用精準之儀器
不明水入侵
施工如有接近河川、湖泊及地下水、地下水位隨潮汐變化處、地層急劇 變化及遭遇受壓水層處,而導致鏡面破除作業出水,以及地下水、古井 附近之地層遭擾動或是流失而噴出造成施工困難。或是因接頭或是管身 破裂而導致進水
使用速硬行地改劑及止水劑 其他
推進管破裂
推進管之破裂可能原因有:土壓荷重、上載荷重、推進路線必需進行土 層調查及地下埋設物調查、推進方向之推進力大於管之耐荷壓力、推進 方向偏離產生偏壓力,亦為管材破損之因及推進方向偏離導致管與管接 觸面積變小產生荷重集中,造成破裂
若情況許可則與以更換,否則加強 滑材注入量繼續推進
資料來源:[本研究彙整]
3.2 營建電腦模擬介紹
一般營建作業之程序是非常難用單一數學型式去表示,並進行優 化動作,所以傳統上都是藉由圖型化之方式輔助進行作業描述,再以 數學式進行分析,例如要徑法(Critical Path Method, CPM)與計畫評核 術(Program Evaluation and Review Technique, PERT)。除上述兩種之 外,電腦作業模擬,亦為新興之分析工具之一,其於傳統製造業上已 行之有年,於近年來,亦有許多營建業採用模擬來進行作業程序之分 析,有效的模擬工具,將會使你更輕易的建立並檢視流程之缺失。
自CYCLONE 推出以來經歷 30 餘年的發展與應用,延伸出許多 以 CYCLONE 理論為基礎之模擬程式,普遍應用於營建工程實務與 學術研究上,可分類為四大骨幹:1)史丹佛大學 (Stanford University) 系統,如 INSIGHT、INTERGRATION、MICRO- INSIGHT;2)密西 根大學 (University of Michigan)系統,如 RESQUE、UMCYCLONE、
COOPS、STROBOSCOPE、EZStrobe;3)普渡大學 (Purdue University) 系統,如 INSIGHT、INTERGRATION、MICRO- INSIGHT;4)朝陽 科技大學 (Chaoyang University of Technology)系統,如 COST。上述 四 大 系 統 骨 幹 雖 細 部 有 所 差 異 , 但 運 算 邏 輯 相 似 。 以 下 僅 以 STROBOSCOPE 介紹營建電腦模擬之系統功能與特性。
STROBOSCOPE 為 STate and ResOurce Based Simulation of COnstruction ProcEsses 之縮寫,其為建立分析營建作業的之一種工 具,普遍使用於離散作業模擬。其模型是以類似活動循環圖之方式建 立,由節點與箭線所組成,可執行於 32 位元之微軟作業系統上,如 Windows95、Windows NT 與 Windows XP 之環境。
STROBOSCOPE 可視為 CYCLONE 系統之衍生,是一種以 AS 模 擬 策 略(Activity Scanning) 為 導 向 之 模 擬 程 式 , 其 功 能 涵 蓋 了
CYCLONE 原有之六種建模元件 NORMAL、COMBI、QUEUE、
COUNTER、 FUNCTION 與 ARC,另具有使用高階程式語言如 FORTRAN 或 C++等擴展增加變數、定義變數等功能,因此其元件較 原有 CYCLONE 為多,並且功能更為強大,也由於其功能增加,連 帶使其更容易描述營建作業程序模型,且效度增加,因此,其較於其 它系統更適合使用於複雜營建作業模擬。
STROBOSCOPE 之特色,為其所建立之模型,是由一系列之程式 語言所組成,並控制作業網圖。於模擬運行時,具有能動態觀測資源 活動與作業活動之功能,此功能協助人們更輕易的觀察作業程序。除 此之外,其可依據決策計畫以動態方式選擇資源發送與控制,並結合 資源產生複合資源,以達到複雜的啟動條件不受資源可用性之影響。
其輸出之報表資訊則包含有模擬時間、資源等待時間、活動次數、作 業第一次與最末次活動開始時間等之統計資料。
於建立STROBOSCOPE 模型時,與 CYCLONE 相同,較常使用 之建模元件為 Normal、Combination、Queue 與 Arrow 四種,採用以 上元件,將可建立大部份之作業網圖模型,如遇複雜工程,則可加入 其它程式語法以確切描繪營建作業程序,如 FORK 可以決定資源的 流向。而 DISCIPLINE 則可以決定各項資源或同類資源流出先後順 序,詳細語法如表3.2 與表 3.3。不過因為 STROBOSCOPE 之功能過 於強大,也因此增加了語法之數量,再加上其是以程式語法方式描述 模型,因此對於大多數之營建工程師而言,因對於程式語法不甚熟 悉,故於使用時為求正確性,需特別注意語法之合理性,並加以驗證。
表3.2 STROBOSCOPE 模擬元件
圖形 名稱 說明
Queue 資源閒置結點
閒置狀態的資源。其代表準備、排隊或等 待資源狀態
Normal 正常作業元件
無限制之邏輯起點,表正常工作作業之實 體
Combi 限制作業元件
限制邏輯元件,表受限制條件約束之工作 作業實體
Consolidator 資源計數器
當累積資源達要求數量後,再一次流出結 點
Link 連結線
流程指向,用於表示在各種活動結點和資 源結之間的流程的方向
AssemblerLink 裝配連結線
表一資源上有其它附屬資源
DisassemblerLink 拆解連結線
表有資源從複合資源中分解出來
DualbaseLink 組合分解連結線
具有 Assembler Link 屬性與 Disassembler Link 屬性
Assembler 裝配器
將不同資源結合為一複合資源
Disassembler 分解器
將一複合資源分解成組成資源
Fork 機率分支結點
由機率決定下一個後續作業,並僅能選擇 一個後續作業
Dynafork 動態資源分支結點
由動態機率決定續續作業,並可選擇多個 後續作業
資料來源:[Martinez, 1996]
表 3.3 STROBOSCOPE 之主要程式語法
語法種類 語法 功能
GENTYPE 設定資源個體間無差異存在之資源名稱 COMPTYPE 產生複合性資源
ASSEMBLER 將資源組合成複合性資源 DISASSEMBLER 分解複合性資源
FORK 用以決定資源的流向(只有一個後續作業) DYNAFORK 用以決定資源的流程(有多個後續作業) CHARTYPE 定義資源的特殊屬性
SUBTYPE 依Chartype 定義的名稱給予資源特性 VARIABLE 定義變數名稱及數值
定義元件
DURATION 定義作業的施作時間(統計分佈或定值) ENOUGH 當進入Combi 的資源達某特定數量時才執行
下一步驟
DRAWAMT 設定每一次資源會被拉走的數量 DRAWUNTIL 直到設定條件滿足才會停止拉資源 DRAWDUR 拉動資源所花費的時間
RELEASEAMT 設定每次釋放資源的數量 CONSOLIDATOR 定義一個集結點的名稱 元件屬性
DISCIPLINE 定義資源流出的順序
INIT 給予Queue 內資源數量之起始值 COLLECT 收集所需資訊
SIMULATE 只有在資源用完時才會停止模擬 PRIORITY 定義Combi 使用資源的優先順序 控制元件
SEMAPHORE 控制程式之停止(與資源無關)
資料來源:[王維志等,2000]
總體而言,STROBOSCOPE有著其他模擬施工流程的方法(如 CYCLONE、COOPS 等)所沒有的特殊功能,經歸納如下[蔡雅雯,
2002]:
一、 可呼叫一些用高階語言寫的函數,如C、C++和FORTRAN。
二、 在模擬的時候,可以數值表示資源的特性。
三、 可任意的產生、推導資源的數量或成本。
四、 在模擬的過程中可以收集任何時點的統計資料。
3.3 模擬最佳化
模擬最佳化是一種結合系統模擬與最佳化的方法,即在處理一個 含有不確定性因素的最佳化問題時,解決問題中的不確定性因素,並 有效的縮短搜尋可行解的時間;利用目標函數之估計值來求解目標函 數最佳解的問題稱為隨機最佳化問題。
隨機最佳化的方法,分為傳統的區域最佳化(local optimization)方 法與近年發展的全域最佳化(global optimization)方法(如圖3-11)[Tekin and Sabuncuoglu, 2004]。而傳統常用於模擬最佳化的方法,屬於區域 最佳化的方法有排序與選擇(ranking and selection, R&S)、多準則組合 (multiple comparison)、隨機搜尋(random search, RS)、及反應曲面法 (response surface methodology, RSM)等等;另外近年發展的模擬最佳 化 方 法 , 屬 於 全 域 最 佳 化 的 方 法 則 有 演 化 式 演 算 法(evolutionary algorithms, EA) 、 塔 布 搜 尋 法 (Tabu search, TS) 、 與 模 擬 退 火 法 (simulated annealing, SA)等等。[吳心怡,2006]
由於本研究問題的決策變數(推力、生產力)是屬於離散型的,且 搜尋範圍之尺度(scale)較小,故將選用random search方法來求解問 題,其為利用隨機的方式進行搜尋,搜尋的範圍根據可行解範圍給定 每個控制因素上下界,也可以在無上下界的空間中利用隨機搜尋的工 作。
一般而言,進行模擬最佳化多透過蒙地卡羅模擬法(Monte Carlo
simulation, MCS)進行隨機抽樣。MCS是一個隨機取樣法(stochastic simulation),依據大數法則(law of large number)破壞機率P
F|
可表 示為(式2.1):P
F|
I
G
Z 0
f
zdx
N
i
Zi
G N I
Z G I E
1
0 1 ,
0
(式2.1) 其中,Z是系統的不確定參數;為設計參數;f
z 則是不確定參 數Z的機率密度函數;Zi是Z的第i個蒙地卡羅樣本;G
Z,
為系統的 極限狀態函數,G
Z,
0與G
Z,
0分別代表破壞事件(破壞事件即 為F )與非破壞事件;N 則是取樣次數。I
G
Z,
0
為一個指標函 數:若G
Z,
0,則I
G
Z,
0
1,否則I
G
Z,
0
0。此方法適用性很廣,而且使用相當簡單,就是問題中的每一個隨 機變數皆被大量取樣,來盡量表現該隨機變數(random number)的特 性,因此只需從不確定性參數的機率密度函數(probability density function; PDF) f
z 中取 N 組獨立且相同分佈(independent identical distribution)的樣本,每個樣本分別代入極限狀態函數G,可得到N組 極限狀態指標G
Zi,
,假設有M 組極限狀態指標超越極限狀態(亦即 發生破壞事件F ),則破壞機率P
F |
可表示為M N。所以蒙地卡羅法是以統計學為基礎,來決定結果的一種方法,因 此,此方法的成敗關鍵就在於是否能完整的將隨機變數的特性充份展 現。而實行蒙地卡羅大致可分為下列五個主要步驟:
(1)定義問題中的隨機變數
(2)量化各隨機變數的機率密度函數( PDF or PMF )及其相關的參 數
(3)根據隨機變數的分佈型態,產生樣本
(4)將產生的樣本,使用至函數或實驗中,並收集、整理結果 (5)將多組結果轉換成風險值
蒙地卡羅是很直觀的一種的技法,它的準確性也相當的好,但當 破壞機率很小的時候,為了要得到精確的破壞機率估算,蒙地卡羅模 擬需要大量樣本,這是蒙地卡羅模擬的主要限制。[謝宜宏,2006]
3.4 結語
本研究擬首先利用營建流程模擬系統,探討下水道工程之推進流 程,以宏觀(macro level)角度探討整體推進作業,據以探討流程改善 與再造對策。由於下水道掘進乃是關鍵作業,而機具選擇尤為重要。
如何在地質風險條件下,評選適合之機具乃是下水道工程之重點決 策。本研究擬以微觀(micro level)角度探討掘進機具選擇之決策模式。
第四章 Macro Model-下水道推進作業模擬與再造
本章首先以宏觀角度(macro level)探討本土地區推進工程之現 況,再以土壓式工法為例,定義出研究目標(小管徑土壓式工法推進 施工作業流程),以資料蒐集方式,蒐集所需資訊,建立流程模型,
進一步探討再造方案,以下將分別說明各工作內容。
4.1 日進量探討
本節主要在探討台灣地區下水道推進工程概況,內容包括資源來 源與處理過程,並分別從日進量與工班效率兩方面探討,以瞭解下水 道推進工程之現況。所謂的日進量,則為於一天工作時間內,完成之 推進距離,定義如下:
推進工法生產力=Σ 推管距離(M)/Σ 推管花費時間(day) (4.1) 式(4.1)中,生產之產品為推管距離,而投入之資源則為工作時 間。於台灣地區,施工單位常常會有超時工作之現象,而產生單位時 間不一情形。故在進行生產力評比時需特別注意代入參數之量度長 度,並進行正規化程序,以免因度量長度不一導致錯誤之生產力結果。
由於日進量的一關鍵影響因素為地質,本研究以地質情況做為分 類,蒐集本土地區施工現地資料,包含泥水式推進工法與土壓式推進 工法,進行日進量之分析,並與日本類似地質之資料,進行正規化之 比較,以瞭解台灣地區推進工程之現況情形。本研究所蒐集之資料包 含已完工或尚在進行之標案。茲將地質情況分為兩類,各類地質條件 如下:
一、普通土層:礫石含率小於等於 30%、最大礫徑小於 30cm、
標準貫入試驗N 值介於 2 至 16 間。
二、卵礫石層:礫石含率大於 30%、最大礫徑大於等於 30cm、
標準貫入試驗N 值介於 2 至 16 間。
待地層狀況決定後,便可以以地質條件為分類,從施工日報表中 擷取出日進量資訊。由於各工區大多沒有資料保存習慣,故資料蒐集 上較為困難,且資料亦有不完整之現象產生,本研究共整理出完整推 進資訊資料共 1113 筆,其中普通土層推進段落筆數 943 筆,卵礫石 層推進段落筆數170 筆。本研究搜尋日本類似地質條件推進工法日進 量數據與本研究所整理出之資料,進行正規化比較,將作業工作時間 轉換為與日本相同之8 小時為標準,結果如表 4.1 與圖 4.1 所示。
表4.1 日進量資料整理表 (單位:公尺)
地層分類 普通土層 卵礫石層
工法 資料地區 本土 日本 本土 日本
300mm 13.4 23.0 11.2 16.2 400mm 11.5 22.0 10.0 15.2 泥
水
式 500mm 10.0 19.0 9.4 14.8 300mm 17.8 20.0 9.3 18.0 400mm 15.6 17.0 8.7 16.0 土
壓
式 500mm 6.6 16.0 6.2 15.2
0 5 10 15 20 25
300 400 500 管徑(mm)
日 進 量 (m)
本土泥水式 日本泥水式
0 5 10 15 20 25
300 400 500
管徑(mm) 日
進 量 (m)
本土土壓式 日本土壓式
泥水式工法 土壓式工法
圖 4.1a 普通土層日進量比較 圖 4.1b 普通土層日進量比較
0 5 10 15 20
300 400 500
管徑(mm) 日
進 量 (m)
本土泥水式 日本泥水式
0 5 10 15 20
300 400 500 管徑(mm)
日 進 量 (m)
本土土壓式 日本土壓式
泥水式工法 土壓式工法
圖4.1c 卵礫石層日進量比較 圖4.1d 卵礫石層日進量比較 資料來源:本研究蒐集、推進工法設計用積算要領
圖 4.1 下水道日進量比較圖
從上述整理表中可看出,無論採用何種工法,本土地區其平均日 進量皆較日本推進日進量值為低。以土壓式工法 400 管徑為例,於普 通土層中本土地區日進量值僅為15.6 公尺,較日本建議值 17 公尺低 約1.5 公尺。於卵礫石層中日進量亦僅約日本之一半,此結果顯示,
本土地區雖以採用推進工法進行管線鋪設工程多年,亦累積相當之施 工經驗,但日進量產出仍未達到日本相關協會所提出之基本建議值,
仍有可進步之空間。
4.2 典型推進工法施工流程模型建立
由於台灣地區下水道建設起步較晚,故較好施工之地層往往已被 其它管線所佔據,造成下水道推進常被迫於較為困難之地層(如卵礫 石層)施工,而經由上述現狀調查結果發現,土壓平衡工法於卵礫石 層中之日進量僅約日本建議值之一半,且工班效率待表現亦不如理 想,有迫切進步之需要,因此本研究首先以土壓式工法為目標,進行 再造工程之探討。土壓平衡式推進施工方法,可分為一次工法與二次 工法兩類。而二次工法之施工方式,是採用先打入先導管於設計路徑
上,待導管建置完成後,再以油壓千斤頂將導管內之土壤以擠壓方式 撥除而非採用出土方式清除推進路徑中之土壤,故容易造成地面隆起 與破壞即有管線之現象,所以二次工法於現在已逐漸不被採用,甚至 現今已有標案己明確規定不得採用二次施工法,因此本研究將以一次 施工法為目標,暫不考慮二次工法。
下水道推進工程施工作業之流程,在假設工作井施築完成之情況 下,可分為機具佈場、推進作業與機具撒場三部單元,而機具佈場與 撒場作業部份,因受限於施工現地情形會有所不同,很難有一標準作 業流程,其佔推進施工之作業時程比重約一成左右,故於本研究中不 討論此兩單元之工作,僅就推進作業部份進行探討與改善。
於土壓平衡工法中,因台灣現有廠商皆無引進適合土壓式工法使 用之吸泥設備,而是採用人力方式出土,故其工作單元又可細分為兩 部份,一為管線推進主作業,另一為掘削後土壤處理之出土作業,詳 細原始施工流程圖與細項工作範圍介定如圖4.2 與表 4.2 所示。
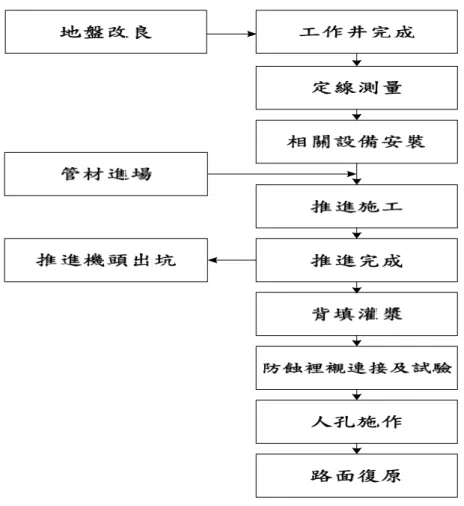
圖4.2 典型土壓平衡式推進施工流程
表4.2 原始推進施工作業範圍界定
作業名稱 作業定義
吊繩安裝作業 管材入場後,安裝管材入井所需之吊繩作業。
推進管入坑作業 於安裝管材吊繩後,將管材從場內置放場吊至坑內 定位之作業。
推進管安裝作業 於管材吊放至坑內後,由坑內工作人員將管材與前 管或推進機頭連結之作業。其中包含油壓、注入材 管材與電管等連結作業。
千斤頂預備作業 於管材安裝後,此時油壓千斤頂是位於反力牆前,
此時需將油壓千斤頂先行推進至推進管後方定位 等待推進之作業。
推進主作業 正式進行推進之作業。
注入管材等拆除 作業
於推進完成後,將各式注入管材、油壓管、電管等 與推進完成管材連結做暫時拆除之作業。
千斤頂後退作業 於完成拆管作業後,將油壓千斤頂退機至反力牆 處。
等待作業 等待出土作業
土桶入坑作業 將裝土桶由坑外吊運至井內作業,並包括土桶吊掛 至起降設備與卸下之動作。
裝土作業 由坑內作業人員將出土鏟至出土桶至放土桶滿桶 為止。
土桶出坑作業 將土桶由坑內吊運至坑外棄土定點之作業,並包含 土桶吊掛至起降設備與卸下之動作。
棄土作業 將土桶內之出土棄置至定點之作業。
在土壓式推進工法中,國內典型推進工班通常由五人所組成,依 照其工作地點可分成於操控機房中之機具操作手、於井內之坑內作業 工與於井外之坑外作業工,其人力配置分別為操作手一人、坑外與坑 外作業工各二人。工作內容詳述如下。
機具操作手:推進千斤頂預備作業、推進作業與推進千手頂 後退作業,屬高技術性勞工。
坑內作業工:管材安裝作業、推進千斤頂預備作業、裝土作
業與推進千斤頂後退作業,屬普通性質勞工。
坑外作業工:吊繩安裝作業、管入坑作業、土桶入坑作業、
土桶出坑作業與棄土作業,屬普通性質勞工。
本研究進一步以新店地區下水道系統新建工程分支管單一推進 段落(推進長度 18 公尺,管徑 400mm,平均覆土深度為 4.54 公尺,
地層狀況為卵礫石層夾灰色中細砂)之作業需時。施工作業需時採現 地人工記錄方式進行蒐集。因不同推進段落其地質條件亦會有所差 異,因此本研究僅以單一推進段落為目標,共計蒐集資料 18 筆,並 以模擬分析軟體Arena10.0 中之 Input Analyzer 進行作業需時分佈之分 析,其結果如表4.3 所示。
表4.3 推進施工各項作業需時機率分佈 作業名稱 需時機率
分佈型態
作業參數 (σ, s,參數 1、2..) 吊繩安裝 Triangular 1.48, 0.27, 0.999, 1.43 ,2 推進管入坑 Beta 2.37, 0.08, 0.495, 0.72 推進管安裝 Beta 5.99, 0.53, 1.27, 1.29 千斤頂預備 Beta 1.72, 0.19, 0.514, 0.548 推進主作業 Beta 13.4, 1.49, 0.858, 0.938 注入管材等拆除 Beta 4.67, 0.80, 1.48, 1.26
千斤頂後退 Beta 1.70, 0.214, 1.27, 0.813 土桶入坑 Beta 0.628, 0.118, 0.569,0.792 裝土作業 Beta 1.40, 0.097, 0.786, 1.39 土桶出坑 Beta 1.58, 0.231, 1.04, 1.12
棄土 Triangular 0.822, 0.144, 0.55, 0.92,1
在完成作業範圍界定、資源資料蒐集與作業需時分析後,即已將 建立模型之資訊蒐集完成,可著手建立原始施工作業流程模型使用
EZStrobe 系統,其名稱與中文字意對照亦於表 4.4~5 中陳述。
表4.4 典型流程作業元件編號與屬性
編號 元件中文名稱 元件英文名稱 元件屬性
B01 吊繩安裝 InstallPipeRope Combi B02 推進管入坑 PipeEnterWell Combi B03 推進管安裝 InstallPipe Combi B04 千斤頂預備 JackReady Combi B05 推進主作業 JackingWork Combi B06 注入管材拆除作業 WaterPipeStrike Combi B07 千斤頂後退作業 jackBack Combi B08 等待出土作業 WaitActivity Normal B09 土桶入坑 BucketInWell Combi B10 裝土作業 LoadSoil Combi B11 土桶出坑 SlingingBucket Combi B12 土桶棄土 DischargeSoil Combi
完成上述步驟後,即可依照上述施工流程,建立原始施工作業流 程模型,如圖4.3 所示。因 EZStrobe 軟體是採用圖型化之方式描述施 工作業流程,於模型呈現上會顯得較為複雜凌亂,故本研究於內文中 以示意圖表示。
表4.5 典型流程資源元件(Queue)編號與數量
編號 元件中文名稱 元件英文名稱 資源數量
A01 推進管預備 PipeReady N/A A02 完成吊繩安裝 FinishInstallRo N/A A03 完成推進管入坑 FinishPipeEnter N/A A04 完成推進管安裝 FinishInstallPi N/A A05 完成千斤頂預備 FinishJackReady N/A A06 完成推進 FinishJacking N/A A07 完成注入管材拆除 FinishPipeStrik N/A A08 出土預備 UnearthReady N/A A09 完成土桶入坑 FinishBucInWel N/A A10 完成裝土作業 FullOfSoil N/A A11 完成土桶出坑 FinishBucSling N/A A12 完成棄土 FinishDischarg N/A A13 坑外作業工 OutsideWorker 2 員
A14 坑內作業工 InsideWorker 2 員 A15 機具操作手 Operator 1 員 A16 推進機 JackingMachine 1 台 A17 起重設備 Crane 1 台
圖4.3 模型中,方框圈取處為推進工程之出土作業部份。現行台 灣地區是以人力方式進行出土作業,出土方式是以天車吊運兩只空土 桶入井,再以人力將坑內之廢土鏟至空土桶中,最後以天車吊出坑外 進行棄置。而推進時單管出土量,以本研究之對象管徑 400mm 之推 進工程為例,出土量約為0.3 立方公尺,以 0.04 立方公尺之土桶裝置,
約需八桶方能完成出土,因此,於建立模型時,需將該部份重覆進行 四次建立,以完整表達描述真實之施工作業流程,但為求圖形精簡易 懂,上圖中僅以一次做為表示。
圖4.3 典型施工作業流程模型示意圖
於建立流程模型後,便可以代入模擬出之相關作業參數,並定義 模擬開始與結束條件。首先本研究以單管為單位,進行推進模擬,模 擬 10 次並將輸出結果與現地記錄資料相比對,藉由施工推進時間初 步驗證模型正確性。經由整理施工現地記錄資料可發現,記錄之 18 筆推進資料中,單管施工時間最大值為 49.78 分鐘,最小值為 45.50 分鐘,平均值為47.25 分鐘。而單管模擬輸出結果分別為 48.55 分鐘、
49.14 分鐘、45.88 分鐘、49.77 分鐘、47.31 分鐘、47.63 分鐘、48.76 分鐘、46.49 分鐘、46.32 分鐘、45.66 分鐘,平均值為 47.55 分鐘。
依上述結果顯示,作業模擬時間均會落在現地記錄中最大值與最小值 範圍區間內,因此可初步確立模型之正確性。
4.3 流程診斷與再設計
本節首先將會以施工模型模擬多管作業流程,並分析結果,再以
敏感度分析確認各作業對施工時間之敏感程度,依據敏感程度大小,
檢視作業流程缺失,提出新作業方案,最後探討新方案之整併可行性。
現行下水道推進施工其單一施工段落之長度分佈範圍不一,從 10 多公尺至40 多公尺為一段落皆有,因此本研究取其平均值 30 公尺為 一單位進行模擬。以 30 管為單位之模擬輸出結果整理如下表 4.6 所 示:
表4.6 三十推管模擬典型流程結果整理(五人) 模擬結果
名稱 天車 坑內工 坑外工 操作手 推進機
數量 1 2 2 1 1
循環
次數 241 482 452 91 91 資
源 資 訊
等待 時間 (min)
4.19 3.47 9.59 10.14 10.14
模擬時間
(min) 1420.39
由上述結果可得知,於 30 管進行模擬時,操作手與天車之等待 時間皆一樣,其現象是因為操作手於進行作業時,皆需搭配推進機行 動。另外,操作手與坑外工之平均等待時間相較於其它資源,有過高 之現象,究其原因是因為國內施工之習慣,操作手通常是由資深員工 所擔任,故常會有老鳥心態,較不會參與其它作業,於此方面較難進 行改善。而坑外作業工之等待時間過長,則顯示其應可以以重新調整 作業與人力配置之手段進行改善。
在進行流程改善工作時,本研究利用敏感度分析(Sensitivity Analysis)確認各項作業對於總工時之敏感程度,並從敏感程度分析結 果中,從最大之影響項目逐項進行檢討,並提出改善方案,以達到對
症下藥之效果。由於此分析之目的僅在找出作業對於施工工時之影響 程度,代入何種作業時間分佈對於其結果並不會造成差異,故本研究 以較簡易之均勻分佈代入模型進行模擬,以簡化程序,並且可避免因 放大其它分佈過程中之程序錯誤,而造成結果失真之現象。結果如下 表4.7 所示,依敏感程度大小排序。
表4.7 下水道推進作業敏感度分析 排序 作業名稱 增長百分比
1 推進 1.26
2 土桶入坑 1.16
3 出土裝桶 1.15
4 棄土 1.12
5 推進管安裝 1.11
6 土桶出坑 1.09
7 管材吊放 1.09
8 注入管材拆除 1.07
9 千斤頂倒推 1.05
10 千斤頂預備 1.04
11 吊繩安裝 1.03
從上述結果可發現,敏感程度最大之作業為推進作業,其也是推 進工程中之靈魂作業。此議題將在第五章進一步透過微觀(micro level) 進行深入探討。而後續影響程度排序第2、3、4 名,皆為出土作業,
因此首先可以出土作業為改造目標,後續再探討其它作業改造可行 性。
依據上述敏感度分析結果,我們得知除推進主作業外,敏感程度 影響最大之其餘作業為出土區塊中之各作業,因此本研究則針對出土 區塊考慮數種改造方案,如引進真空吸泥器、增加作業人員等,但因 考量到廠商投資意願與中小管徑推進人力無法進入管內作業,且工作
井之空間亦有限,所以增加工班人數對於生產力之實質幫助不大等原 因,先行否決數項方案,並以不增加廠商過多額外成本為前提,以現 地觀察方式,經由創意思考,提出三種可行改善方案:改變土桶吊昇 型式、改變出土型式、與預作吊繩安裝。以下僅以改變土桶吊昇型式 說明流程再造探討。最後彙整三者之優劣作綜合性比較。
推進總工時中出土作業所佔比例非常高,最高可達一半左右,尤 其是管徑愈大,所佔時間愈重。但現行台灣地區土壓式工法施工廠 商,因成本之考量,通常皆只向國外廠商採購推進機與推進平台,而 未引進較為先進之真空吸泥設備以協助出土作業。因此目前國內採用 土壓式工法進行推進工程施工之工區,皆以人力方式進行出土作業,
以致於推進效率較為低落。
現行人力出土之作業循環,可分成土桶入坑、出土裝桶、土桶出 坑與棄土作業四步驟,以單掛勾方式,單次吊掛兩只土桶進行。舉管 徑 400mm 為例,單管出土量約為 0.3 立方公尺,以 0.04 立方公尺之 土桶裝置,約需八桶方能完成出土,因此需進行四次循環,其作業循 環圖如下圖4.4 所示:
圖 4.4 出土作業循環圖
由上圖中可看出,如以兩只土桶進行出土作業,將需進行四次循 環,不過如採以雙掛鈎方式,進行土桶吊昇,其單次可吊掛之土桶數
則增為四只土桶,將可減少出土作業循環次數由四次減為兩次。不過 於此需注意,因每次循環時其裝土桶數由兩桶變為四桶,此時出土裝 桶作業於每循環皆進行兩次,以精確描述改變後之需時狀態。模型示 意與模擬結果如圖4.5 與表 4.8 所示。
圖 4.5 下水道推進施工作業流程模型(一):改變土桶吊昇型式 依據第一次模擬評估結果發現,坑外作業工其流動次數較其它工 種資源為低,而待工時間相較於其它資源有較大之現象,因此本研究 嚐試將坑外工作業人數縮減一人,重新進行模擬,以比較其結果差 異,並探討減少坑外工之可能性,模擬結果如表4.9 所示。
經 改 善 後 此 作 業 僅 需 以 兩 次 循 環 即可完成
表4.8 三十根推管模擬方案一作業輸出(五人) 模擬結果
名稱 天車 坑內工 坑外工 操作手 推進機
數量 1 2 2 1 1
流動
次數 181 362 242 91 91 資
源 資 訊
等 待 時間
(min)
4.97 3.62 9.24 8.27 8.27
模擬時間
(min) 1247.93
表4.9 三十根推管模擬方案一作業輸出理(四人) 模擬結果
名稱 天車 坑內工 坑外工 操作手 推進機
數量 1 2 1 1 1
流 動
次數 181 362 241 91 91 資
源 資 訊
等 待 時間 (min)
5.00 3.69 4.13 8.25 8.25
模擬時間
(min) 1257.69
比較兩種輸出結果可發現,採用四人工班進行作業時,坑外工之 待工時間有明顯縮短之現象,而施工時間僅比五人工班略為提高約十 分鐘,但兩種之輸出結果均優於原始施工流程,此結果說明無論是採 用何種工班組成形式,其作業生產力皆會高於原始作業程序。
透過上述程序,本研究提出三種流程再造方案,經由資源組合與 合併動作,共可列舉出十種資源流程組合模式,並分別進行電腦模擬
![圖 2.1 營建業流程再造模式[鄭明淵、蔡明修,2008]](https://thumb-ap.123doks.com/thumbv2/9libinfo/9122916.407549/11.892.313.626.117.648/圖21營建業流程再造模式鄭明淵蔡明修28.webp)