行政院國家科學委員會專題研究計畫 成果報告
多段速度切換型棒狀超音波馬達之研發(I)
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 95-2221-E-151-006- 執 行 期 間 : 95 年 08 月 01 日至 96 年 07 月 31 日 執 行 單 位 : 國立高雄應用科技大學機械工程系 計 畫 主 持 人 : 何信宗 計畫參與人員: 碩士班研究生-兼任助理:施心智 報 告 附 件 : 出席國際會議研究心得報告及發表論文 處 理 方 式 : 本計畫涉及專利或其他智慧財產權,1 年後可公開查詢中 華 民 國 96 年 11 月 02 日
6
附件:封面格式
行政院國家科學委員會補助專題研究計畫成果報告
※※※※※※※※※※※※※※※※※※※※※※※※※※
※
※
※
多段速度切換型棒狀超音波馬達之研發(I)
※
※
※
※※※※※※※※※※※※※※※※※※※※※※※※※※
計畫類別:■個別型計畫
□整合型計畫
計畫編號:NSC 95-2221-E-151-006-
執行期間:
95 年 08 月 01 日至 96 年 07 月 31 日
計畫主持人:何信宗
共同主持人:
計畫參與人員:施心智
本成果報告包括以下應繳交之附件:
□赴國外出差或研習心得報告一份
□赴大陸地區出差或研習心得報告一份
■出席國際學術會議心得報告及發表之論文各一份
□國際合作研究計畫國外研究報告書一份
執行單位:國立高雄應用科技大學機械系
中 華 民 國
96 年 10 月 25 日
行政院國家科學委員會專題研究計畫成果報告
多段速度切換型棒狀超音波馬達之研發(I)
Development of a Rod Type Ultrasonic Motor System with a
Multi-speed Driving Circuit (I)
計畫編號:NSC 95-2221-E-151-006
執行期限:95 年 08 月 01 日至 96 年 07 月 31 日
主持人:何信宗 國立高雄應用科技大學機械系助理教授
計畫參與人員:施心智 國立高雄應用科技大學機械系研究生
一、中文摘要 本研究之規畫為三年期之研究計畫, 在第一年的計畫中,主要是以棒狀超音波 馬達的定子結構設計、分析為研究重點, 這個定子結構由多個壓電圓環與圓柱型彈 性體串接後鎖緊而成,本報告在探討其定 子尺寸設計與振動模態關係後,建立其動 態模型以探討可驅動頻率、能量轉換等重 要關係,最後並製作完整的棒狀超音波馬 達原型,以實驗驗證分析結果,確立棒狀 超音波馬達的結構設計原則。 關鍵詞:超音波馬達、壓電致動器、棒狀、 動態系統 AbstractThis project is planed for three years of research. In the first year of the project, the aim is mainly to study the stator’s structure for the rod type ultrasonic motor. An ultrasonic motor is composed of a stator and a rotor. The multilayer piezoelectric elements are sandwiched between the upper and lower metal blocks to form the stator through a screw rod. The rotor is pressed against the stator through a spring and an axis across the motor to be rotated. The report will conclude the working principle of the rod type ultrasonic motor, design rules of the rod type, the relations between motor’s performance and configuration.
Keywords: Ultrasonic Motor, Piezoelectric Actuator, Rod-type, Dynamic System 二、前言 近年來,隨著機器人開發技術的進步 與發展,為了使機器人動作時其身上各關 節能夠輕巧的操作自如,超音波馬達所扮 演的關鍵性地位便顯得越來越重要了。相 對於傳統電磁式馬達而言,超音波馬達的 優勢在於能夠提供機器人關節部份大扭力 低轉速的動力來源,而且超音波馬達本身 能夠充份發揮輕薄短小的特性,可不透過 變速齒輪組直接驅動對象物,在達到驅動 的目的之餘並不造成機器人在重量上與體 積上的負擔。還值得一提的是,超音波馬 達由於是以摩擦力驅動的關係,在除去電 力時還能具有靜保持力,讓機器人的關節 保持在原來的姿勢與角度上,這是電磁馬 達所無法達到的。 對於機器人關節所需要的超音波馬達 來說,本文所要探討的棒狀超音波馬達可 說是轉動式馬達中最切合需求的類型。本 研究所要探討的棒狀超音波馬達其動作原 理如圖1所示,馬達結構主要由定子與轉子 兩大部份所組成,而其中的關鍵技術在於 壓電圓環和圓柱形彈性體所構成的定子結 構,如圖2所示。為了讓馬達定子產生變形 並推動轉子運轉,必需先利用馬達定子上 的壓電片之逆壓電效應,透過弦波電壓的 施加讓壓電片產生週期性的變形運動,且 為了讓壓電片上的變形量能夠被放大,則 必需充份利用壓電結構之共振現象,以共 振頻率附近的弦波電壓激發定子表面進行 較大振幅之週期性變形運動。此外,為了 要讓馬達能夠順利運轉必需要先在定子表 面產生二維的週期性弦波運動,亦即橢圓 型運動軌跡。
三、結構與作動原理 為了在定子表面產生二維的橢圓型運 動軌跡,必需要在定子結構設計時先找到 兩個互為直交的振動模態,並且同時以弦 波電壓激發此兩個直交振動模態的方式, 讓定子表面在共振狀態下產生大振幅的橢 圓型運動軌跡。 如圖1所示,由於棒狀超音波馬達定子 的縱向振動模態與扭轉振動模態為兩個呈 現直交的振動模態,縱向振動模態進行上 下變形運動而扭轉振動模態進行左右變形 運動。當這兩個振動模態經由定子結構的 尺寸設計使其具有相同自然頻率時,即可 以兩個具相位差之正弦波電壓同時激發馬 達定子振動,並在定子表面形成橢圓型運 動軌跡。 在一週期正弦波電壓的驅動下,且作 用於縱向振動模態與扭轉振動模態的電壓 相差90度相位差,這時棒狀超音波馬達的 週 期 性 變 形 運 動 情 形 可 以 依 (1)→(2)→(3)→(4)→(1)的順序分解為四個 運動分解圖。當定子表面的橢圓型運動軌 跡形成後,若以彈簧施以預壓力將轉子推 向定子表面的話,則轉子與定子之間會因 摩擦作用使得定子表面的振動能轉換為轉 子的轉動運動。 圖1 棒狀超音波馬達之動作原理 圖2 棒狀超音波馬達定子之組成結構 圖3 壓電圓環的構造 圖4 超音波馬達 本研究中所採用的馬達定子結構如圖 2所示,為了達成圖1所示的各階段變形運 動,定子中設計有一組能夠驅動扭轉運動 的振動子(Torsional Vibrator)與一組能夠驅 動軸向伸縮運動的振動子(Longitudinal Vibrator),這兩組振動子均由壓電材料所製 成。其中,扭轉振動子是由兩個壓電圓環 構成,其極化方向為圓環的切線方向,詳 細的構造如圖3所示。伸縮振動子在本研究 中是以極化方向為軸向的壓電圓環所構 成,但效果不佳,正檢討改為採用積層型 壓電圓環取代,以降低所需的驅動電壓振 幅。圖4中所示為本研究所製作之棒狀超音 波馬達原型。 另外,為了在進行設計棒狀超音波馬 達時,對這型超音波馬達之動態特性有所 了解,以便能夠設計出能夠充份發揮性能 的超音波馬達結構,在下段文章中將針對 構成定子結構中關鍵元件的壓電圓環進行 振動模態分析與阻抗分析,再對棒狀定子 的扭轉運動與結構的關係進行分析,並對 所分析之結果進一步加以探討。 四、理論分析 4.1 壓電圓環的扭轉振動分析 為了激發棒狀超音波馬達定子的扭轉 振動,此壓電圓環的外觀如圖 3 所示,其
構造是以一完整之壓電圓環依角度切割成 八等份,並對每一等份的切線方向施加高 電壓以達到極化的目的。各別極化後的八 個壓電塊再用環氧樹酯黏合為原來的壓電 圓環。此壓電圓環的電極在上下兩面,當 對電極施以正弦波電壓變可驅動此棒狀壓 電結構的切向模態產生振動。 現在以圓柱座標(r, θ,z)來考慮上述的 壓電圓環,由於只有軸向(z向)存在有施加 電場(Ez)與電位移(Dz),經過簡化後的壓電 方程式可以下三式表示。 r s44E r (1) z z E z s44 d15E (2) z T z z d E D 15 11 (3) 其中,在不考慮圓環切向變化的情形 下,應變γrθ與γθz根據微小變形的假設,可 以得到以下的關係式。 r u r u r (4) z u z (5) 式中uθ為切向變形量。另外,壓電圓 環內的電場Ez與電位移Dz需滿足以下的關 係式。 z Ez (6) 0 z Dz (7) 壓電圓環的應力平衡方程式在不考慮 切向變化時,可以得到下式。 2 2 2 t u r z r r z r (8) 將(4)(5)式先代入(1)(2)式後,再將結果 代入(6)式整理後,可以得到如下的方程式。 2 2 15 2 2 44 2 2 2 2 2 1 z d t u s z u r u r u r r u E (9) 另外,將(3)式代入(7)式後,可以整理 得到下式。 2 2 11 44 15 2 2 z u s d z E S (10) 將(9)式與(10)式整理後,可得到下式。 2 2 44 2 2 2 2 2 2 ) 1 ( 1 t u s z u k r u r u r r u E p (11) 2 15 2 15 2 1 k k kp (12) 令uθ(r, z, t)=Ur(r)Uz(z)exp(jωt)代入(11) 式之波動方程式後,可透過分離變數法將 方程式分離為r變數與z變數的兩個微分方 程式,如下所示。 0 1 2 2 2 2 r r r r U r U r U r r U (13) 0 2 2 2 z z U z U (14) E p s k2) 2 2 2 44 1 ( (15) (13)與(14)之微分方程式可各別求得 其解,如下。 ) ( ) ( ) (r AJ1 r BY1 r Ur (16) ) sin( ) cos( ) (z C z D z Uz (17) 其中,β為z方向的波數,A與B之未知 數 可 由 壓 電 圓 環 在r 方 向 的 邊 界 條 件 決 定,而C與D之未知數可由壓電圓環在z方 向 的 邊 界 條 件 決 定 。 再 令 φ(r,z,t) =Ur(r)Φ(z)exp(jωt)後,可以由(10)式求得 Φ(z)。
C z D z
az b s d z E S ( ) cos( ) sin( ) 11 44 15 (18) 現在考慮z方向的邊界條件為一端固定 (z=0),另一端自由(z=h)的情形,下端電極 面接地,上端電極面施以電壓Vi。可求得C=b=0與未知數D=d15Vi/Δ及a。 d Vi D 15 kp hVi a (1 )cos 2 h k d h kp sin cos ) 1 ( 2 15 2 15 2 因此,可以得解Uz(z)及Φ(z)。 z V d z U i z( ) 15 sin (19)
k z h k z
V z) i (1 p) cos psin ( 2 2 (20) 壓電圓環在一端固定,另一端自由的 邊界條件下,其自然頻率可由Δ=0 求得, 而各自然頻率所對應的扭轉振動模態函數 可由(19)式畫出。 4.2 馬達定子的扭轉振動分析 現在考慮兩片壓電圓環與兩個金屬圓 柱體組合後的棒狀超音波馬達定子的結 構,如圖 5 所示。由於此定子結構在 z=0 的兩側對稱,因此計算上可以簡化為只考 慮 z>0 側的振動分析即可,而在 z=0 處的 邊界條件則看成固定端的邊界條件。即, 在 z=0 處,其邊界條件為 Uzp=0,Φzp=0。 在z=h 處,其邊界條件為 Uzp= Uzm,τp=τm, Φzp=Vi。在z=h+l 處,其邊界條件為 τm=0。 其中,p 代表壓電材料,m 代表金屬。 對彈性金屬而言,其振動方程式可由 (9)式修正後得到。 2 2 2 2 2 2 2 1 t u G z u r u r u r r u (21) 圖5 棒狀超音波馬達定子 經過分離變數法使用後,(21)式可分離 為下兩式。 0 1 2 2 2 2 mr mr mr mr k U r U r U r r U (22) 0 2 2 2 mz mz n U z U (23) 2 2 2 k n k (24) 其中,k=ω/c 為波數,且 c2=G/ρ。G 與 ρ各別為金屬圓柱體的剪切彈性模數與密 度。(22)與(23)式的解各別可表示如下。 ) ( ) ( ) (r AJ1 kr BY1 kr Umr (25) ) sin( ) cos( ) (z C nz D nz Umz (26) 在代入邊界條件後,可以得知C=0, b=0。還有以下的關係式。 nh D nh C hDsin cos sin (27)
i E Ss D h ah V d 111544 sin (28) ) ( cos ) ( sinn h l D n h l C (29)
D nh C nh
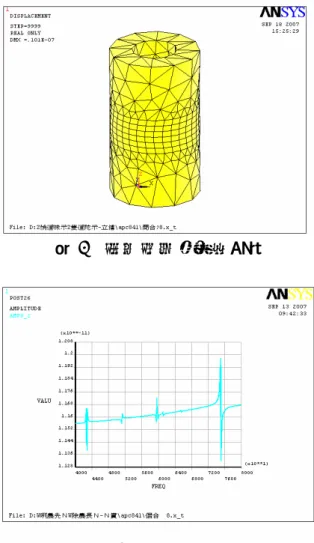
nGs a d h k D E p sin cos cos ) 1 ( 44 15 2 (30) 由(27)-(30)等式可解得未知數 a、D、 C 、D ,進而得到定子的模態函數與自然 頻率。 4.3 馬達定子的扭轉振動的有限元素分析 前面兩節為馬達定子的數學解析,在 本研究中也利用另一個分析工具(ANSYS 軟體)來進行馬達定子的振動分析與阻抗 曲線分析,如圖6 所示為定子的扭轉振動 模態分析圖,圖7 所示為定子結構中壓電 圓環兩電極端間的導納曲線,得知此定子 的自然頻率為75kHz。圖6 定子的扭轉振動模態 圖7 定子中壓電圓環的導納曲線圖 五、結論 在本研究中,對於棒狀超音波馬達定 子結構進行了理論分析,也以有限元素軟 體ANSYS 分析了馬達定子的振動模態與 自然頻率,並且以ANSYS 求得定子的導納 曲線,這個分析有助於設計馬達定子時能 夠預知所需要的正弦波電壓大小。最後, 在本研究中也製作出了棒狀超音波馬達定 子的原型,不過由於所設計的馬達仍然需 要極大的電壓才能讓定子的壓電結構產生 足夠的變形,在驅動電路的設計上仍然不 能充份達到馬達的需求。因此,在定子馬 達結構的最佳化設計仍然還有很大的改善 空間。
出席國際學術會議心得報告
計畫編號 NSC 95-2221-E-151-006 計畫名稱 多段速度切換型棒狀超音波馬達之研發(I) 出國人員姓名 服務機關及職稱 何信宗/國立高雄應用科技大學機械系助理教授 會議時間地點 China, Harbin會議名稱 The 2nd IEEE Conference on Industrial Electronics and Applications 發表論文題目 Modeling of Disk-type Piezoelectric Transformer
一、參加會議經過
第二屆IEEE Conference on Industrial Electronics and Applications 於中國哈爾濱舉行,這個 國際會議為IEEE 學會所舉辦的會議,因此具有一定的水準,投稿者超過一千篇,其中有大 約400 多篇論文被接受,本人也很榮幸的參與此次會議的審稿工作。由於舉辦地點在中國的 緣故,參與發表的學者以中國為最多,台灣方面參與發表的論文篇數共有29 篇,在來自 24 國的參與學者裡面算是不少了,這個結果大概與會議舉辦的地點有關。哈爾濱位於中國最北 的省份黑龍江省,雖然會議舉行日期快到五月底了,但還是有一點涼意,早晚溫度只有10 度 左右。從台灣到哈爾濱並不是很方便,需要轉機多次,而且哈爾濱也並不屬於航班很多的國 際機場,要訂直達機票並不容易,經過幾番舟車勞頓,我才經過香港、大連最後到達了哈爾 濱,之後才發現其實應該先搭國際航線到中國大陸的大城市後,再到當地購買搭乘大陸的國 內線航線,如此才是省錢又省時的交通路線規劃,也算是也得到了經驗。這個國際會議的舉 辦地點是在松花江畔的香格里拉大飯店,雖然是屬於五星級的大飯店,但我覺得離哈爾濱市 區的鬧區太遠,在會議期間吃飯問題不是太容易解決,常常要花較昂貴的價錢解決食的問題。 這次我發表論文的場次剛好被安排到與台科大電機系劉添華同場次,感覺上參與者還是 以中國人居多,再穿插一些歐美人士,不過發言還算踴躍。會後順便參觀了一下這次會議的 承辦學校哈爾濱工業大學,才對這個當初蘇俄人為了開辦西伯利亞鐵路東段,針對鐵路人才 培育所成立的大學有所了解,前後經過蘇俄人、日本人到中國人經營過的哈爾濱工業大學可 說是真正的達到國際化了,大陸東北地方在清末民初的這些哀怨的過往歷史,可說是身處哈 爾濱時所最容易感受到的事了。 二、與會心得 近來感受到中國大陸越來越積極的參與國際事務,特別在這兩年,IEEE 學會的國際會議 有許多都由中國大陸的大學來承辦,增進了大陸學者許多參與國際學術交流的機會,看來台 灣的學術界也要加把勁了,免得被中國大陸的人海淹沒了。