Received : Apr. 19, 2006 ©2006 National Kaohsiung University of Applied Sciences, ISSN 1813-3851 Accepted : May 10, 2006
垃圾焚化發電系統動態特性分析
陳榮芳*、陳盟仁*、蘇文耀**、林堉仁*** * 國立高雄應用科技大學電機工程系 ** 成宜企業股份有限公司 *** 義守大學電機系 E-mail: [email protected]摘 要
本研究主要目的在探討一個實際的垃圾焚化發電系統在正常及故障情況下的動態特性。 這個系統的組件包括廢熱回收鍋爐、汽輪發電機、激磁機、三相變壓器、電動機、以及靜態 負載等。研究方法為先推導系統組件的數學模型,接著利用 SIMULINK 與 SimPowerSystems 開發模組,然後將這些模組依系統架構連接,最後進行增載運轉、卸載運轉、以及故障運轉 模擬。此外,為了讓模擬與實際運轉情形更接近,特別依垃圾的特性選定變動的熱值來進行 模擬。模擬結果顯示,在這些運轉模式下,垃圾焚化發電系統的特性都是可以接受的,亦即 模擬結果與預期一致,並且可推論的,應可和實際運轉情形一致。此研究最大的價值是可以 做為垃圾焚化發電系統規劃、運轉、以及擴充的重要參考。 關鍵詞:垃圾焚化發電,汽輪發電機,動態特性分析,廢熱回收鍋爐。1. 前 言
在土地取得日益困難,以及環保意識抬頭與提昇居住品質的前提下,垃圾焚化逐漸取代 傳統的垃圾掩埋方式,成為目前國內外各都市垃圾處理的主要方式。一座垃圾焚化廠固然是 以垃圾處理為首要任務,然而在經濟效益與能源利用的考量之下,大多數的垃圾焚化廠均設 有汽輪發電機,將垃圾作為燃料來發電,以賺取利潤。 國外先進國家焚化技術開發約始於 60 年代。歐洲的焚化技術可以說是世界其他地區的 「導師」,不只是技術進步,同時開發也比其他地區早。以德國為例,早在 1893 年即於漢堡 市興建第一座焚化爐,經過多年的發展使德國無論在焚化技術、能源回收、廢氣處理等方面, 皆有相當成就。在美洲,美國很早就開始發展垃圾焚化爐,1965 年時已有 299 座傳統集中處 理的垃圾焚化爐,後來因為聯邦政府空氣污染物排放標準日趨嚴格,使得大部分遭到關閉,目前美國有 114 座以上的垃圾焚化爐。在亞洲,以日本、新加坡起步較早,尤其日本自 1960 年開始興建垃圾焚化爐以來,都市垃圾焚化爐在亞洲市場佔有率極高[1~3]。 在台灣,垃圾以焚化處理起於民國 81 年內湖垃圾焚化廠正式運轉,此垃圾焚化廠亦是當 時國內垃圾焚化的代表。根據環保署所提供的垃圾資源回收廠興建工程執行現況,得知到 94 年總共會有 21 座垃圾焚化廠,垃圾總處理量為 2,1900 公噸/日,在環境的保護與改善方面確 實功不可沒[4~5]。 垃圾焚化發電的相關文獻雖然不少,但是大多數都是在探討廢熱的利用與環保等問題 [6~8],對於發電系統的研究反而不多。幸運的是,在傳統火力發電及汽電共生發電的文獻中, 有不少是對於汽輪發電系統的研究以及模型的建立[9~16]。然而,這些研究中都沒有探討到 熱源熱值變動情況下,汽輪機動態特性變化的情形,這也是垃圾焚化發電的特點。 有鑑於此,本研究除了開發垃圾焚化發電系統原動機模型外,也選定了一座由四組廢熱 回收鍋爐及一部汽輪發電機、激磁機、三相變壓器、電動機及靜態負載等所組成的實際系統 做為研究的對象,並且利用 SIMULINK 及 SimPowerSystems 開發系統組件模組。本研究的模 擬項目包括增載、卸載運轉模擬,以及故障運轉模擬。此外,為了讓模擬結果與實際運轉情 形更接近,還選定了數種不同垃圾熱值的情形來進行模擬。模擬結果顯示,在這些運轉的模 式下垃圾焚化發電系統都是可以穩定的,證實了本研究最大的價值是可以做為垃圾焚化發電 系統規劃、運轉、以及系統擴充的重要參考。
2. 垃圾焚化發電系統
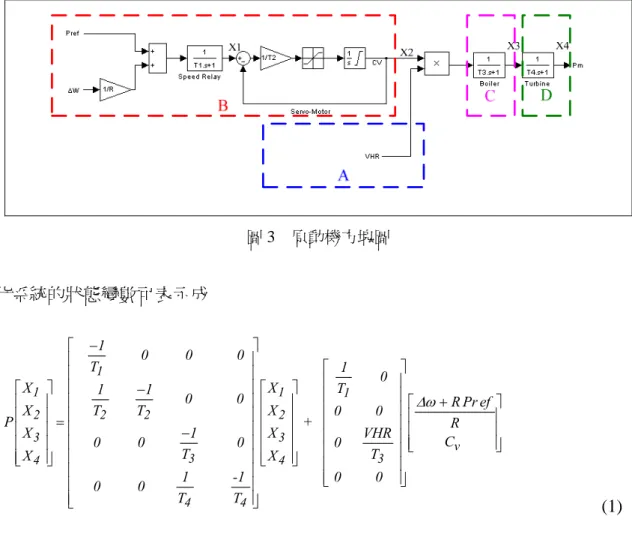
2.1 系統架構圖 圖 1 為垃圾焚化發電系統架構圖,系統組件包括四組廢熱回收鍋爐、四組伺水泵、兩部 凝結水泵、一部汽輪發電機、以及其他附屬裝置[3]。垃圾焚化發電系統架構類似於火力發電 系統,相同之處在於兩者都是利用加熱鍋爐產生高壓高溫蒸汽來推動渦輪發電機,產生的廢 氣則經過處理後排放,不同之處則在於垃圾焚化發電的熱值變動較大。 2.2 垃圾焚化發電系統單線圖 圖 2 為一個典型的垃圾焚化發電系統單線圖,系統組件包括汽渦輪機及附屬設備、同步 發電機、激磁系統、三相變壓器、電動機及靜態負載等組件。 2.3 原動機模型 垃圾燃燒產生熱量,經由燃燒控制器控制輸出。蒸汽進入汽輪機後,流經一系列固定安 裝於汽輪機機殼上,不作任何機械運動的葉片噴嘴(Stationary nozzles)。蒸汽流經固定葉片 時,壓力下降,體積膨脹,流速加快後,高速的蒸汽直接衝擊安裝於汽輪機軸上的動葉輪葉片(Impeller)上,使得汽輪機軸高速轉動,每次作功循環共歷經「降壓-膨脹加速-衝擊」等 階段。蒸汽從入口端到排放端,將原本富含能源的高壓高溫蒸汽(絕對壓力 38kg/cm2, 395℃) 逐級釋放能量轉換成機械能後,變成低壓低溫的排放蒸汽(絕對壓力 0.25kg/cm2, 60℃)。兩 者之間的能量差即為輪機軸所吸收的動能,再將此動能傳遞至發電機軸,作為發電動力來源 [3]。圖 3 為原動機方塊圖,包括 A 部分垃圾熱值、B 部分燃燒控制器、C 部分廢熱回收鍋爐、 以及 D 部分汽輪機等四部份。 圖 1 垃圾焚化發電系統架構圖 圖 2 垃圾焚化發電系統單線圖
圖 3 原動機方塊圖 此系統的狀態變數可表示成 1 1 2 2 2 3 3 4 4 4 1 0 0 0 T X 1 1 0 0 X T T P X 1 0 0 0 T X 1 -1 0 0 T T − ⎡ ⎢ ⎢ ⎢ ⎡ ⎤ − ⎢ ⎢ ⎥ ⎢ ⎢ ⎥ = ⎢ ⎥ − ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ 1 1 2 3 v 3 4 1 0 X T R Pr ef X 0 0 + R X VHR C 0 T X 0 0 Δω ⎤ ⎥ ⎡ ⎤ ⎥ ⎢ ⎥ ⎥ ⎡ ⎤ ⎢ ⎥ ⎥⎢ ⎥ ⎢ ⎥⎡ + ⎤ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢⎣ ⎥⎦ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎢ ⎥ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎢ ⎥ ⎢ ⎥⎦ (1) 其中VHR 為垃圾熱值,Δω 為轉速差,R 為速度調整常數,Pref為參考功率,T1為電驛的 時間常數,T2為伺服閥的時間常數,CV控制閥開度,T3為水牆管時間常數,T4為功率轉換時 間常數,p 為微分運算子。 2.4 同步發電機模型 三相同步發電機的數學模型轉換為 d-q 軸後,可表示成 qs s q r d mq r md r md qs ds r q s d r mq md md ds kq mq kq kq kq fd md fd fd md fd kd md md kd kd kd v r pL L pL L L i v L r pL L pL pL i v pL 0 r pL 0 0 i v 0 pL 0 r pL pL i v 0 pL 0 pL r pL i ω ω ω ω ω − − − ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ − − − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (2) 上式中vds、ids為 d 軸定子電壓及電流,vqs、iqs為 q 軸定子電壓及電流,vkq、ikq為 q 軸阻 尼繞組電壓及電流,vfd、vkd、ifd、ikd為激磁電壓、d 軸阻尼繞組電壓、激磁電流、d 軸阻尼繞 組電流,rs、rfd、rkd、rkq為定子電阻、激磁繞組電阻、d 軸阻尼繞組電阻、q 軸阻尼繞組電阻, Ld、Lq、Lfd、Lkd、Lkq為 d 軸電感、q 軸電感、激磁繞組電感、d 軸阻尼繞組電感、q 軸阻尼繞
組電感,Lmd、Lmq為 d 軸互感、q 軸互感,p 為微分運算子[16-18]。 2.5 激磁系統模型
同步發電機利用端電壓回授信號經由自動電壓調整器(Automatic Voltage Regulator, AVR)來改變磁激電壓,進而控制同步發電機端電壓的目的[19-20]。圖 4 為 IEEE Type 1 激磁 控制系統方塊圖。 R R 1 A A 1 A s A A A A 2 2 REF 3 E E 3 2L E E 4 4 2L F F E E E F E F F 1 0 0 0 1 0 0 0 T T X K 1 0 K X 0 K 0 0 V T T T T X X V p X ( K S ) X 1 X 0 0 0 0 0 0 T T X X X K K ( K S ) 1 0 0 0 0 0 T T T T T − ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢− − ⎥ ⎢ ⎥ ⎡ ⎤ − ⎡ ⎤ ⎡ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= ⎢ ⎥+ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ − + ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎣ ⎣ ⎦ ⎣ ⎦ ⎢ − + − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎤ ⎥ ⎥ ⎥ ⎥ ⎢ ⎥⎦ (3) A A K 1 sT+ R 1 1 sT+ X1 X2L X3 R V R V 2 X E E 1 K +sT FD SE=f (E ) FD E 4 X F F sK 1 sT+ S V REF V 圖 4 IEEE Type1 激磁控制系統方塊圖 2.6 感應電動機模型 三相感應電機的數學模型轉換為 d-q 軸後,可表示成方程式(4)。其中 vds、ids是 d 軸定子 電壓及電流,vqs、iqs是 q 軸定子電壓及電流,vdr、idr是 d 軸轉子電壓及電流,vqr、iqr是 q 軸 轉子電壓及電流,rs、rr是定子電阻及轉子電阻,Lss、Lrr是定子電感及轉子電感,Lm是磁化 電感,p 是微分運算子。 qs s ss m qs ds s ss m ds qr m r m r rr r rr qr dr r m m r rr r rr dr v r pL 0 pL 0 i v 0 r pL 0 pL i v pL L r pL L i v L pL L r pL i ω ω ω ω + ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢= ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ − + − ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (4)
3.模擬結果與討論
3.1 SimPowerSystems 模組架構 圖 5 為垃圾焚化發電系統的的模組架構,主要包括三部份-A 部分為汽輪發電機模組,B 部分為無限滙流排模組,C 部分為負載模組。 圖 5 垃圾焚化發電系統模組架構 3.2 模擬順序 1. 模擬一:增載運轉模擬 圖 6 為增載運轉模擬的時序圖。在時間為 0 秒時,四個均爐穩定運轉,垃圾熱值 1800~2500 kcal/ton,隨機變化時垃圾的投入量為 18.75 ton/hr,蒸汽壓力為 40 kg/cm2,400 ℃蒸汽內焓值為 768.4 kcal/kg,發電機僅供電給靜態負載。接著,5 台電動機依序起動,系 統形成獨立運轉的情形。在 20 秒時垃圾焚化發電系統依併聯程序與市電併聯,原動機的輸 出設定為 0.8pu。總模擬時間 50 秒。 2. 模擬二:卸載運轉模擬 在 20 秒前的情形與模擬一相同。在 20 秒時,焚化發電系統與市電解聯。總模擬時間 50 秒。 3. 模擬三:三相接地故障摸擬 圖 7 為三相接地故障模擬的時序圖。在 20 秒前的情形與模擬一相同。在 30 秒時 11.4kV 滙流排發生三相接地故障,30.3 秒故障排除並且與市電解聯。總模擬時間 50 秒。2 4 6 8 1012 14 Generator system 0 16 182022 24 26 28303234 363840424446 4850 Transformer 1 Transformer 2 Transformer 3 Static Load Motor 1 Motor 2 Transformer 4 Motor 5 Motor 4 Motor 3 Transformer 圖 6 正常運轉模擬的時序圖 圖 7 故障運轉模擬的時序圖 3.3 模擬結果 1. 模擬一 此模擬主要目的在了解汽輪發電機系統在增載情況下系統變數變化的情形,在此模擬 中是透過參考功率的改變,來觀察整個系統變化的情形,模擬結果如圖 8~10 所示。由圖中 可看出,增載情況下汽輪機的輸出功率由原先所接的負載而定最後提高到約 0.8pu,而發電 機轉速未加載前會隨著高壓電動機的起動做適當的調整但起動後很快又維持在同步速度,
加載時因與無限匯流排併聯故轉速會在同步速度。發電機激磁電壓,隨著高壓電動機的起 動(會造成端電壓及無效功率變動)而變動,然而發電機端電壓因為有激磁控制系統所以 皆能穩定的維持在 1.0pu 附近;從無限匯流排可觀察到輸出電功率原先供給匯流排上靜態 負載系統併聯後從發電機吸收功率,至於無效功率系統併聯後與發電機共同供給整個系統 所需的無效功率。 2. 模擬二 此模擬主要目的在了解原動機系統在卸載情況下系統變數變化的情形,在此模擬中是 透過參考功率的改變,來觀察整個系統變化的情形,模擬結果如圖 11~13 所示。由圖中可 看出,卸載情況下汽輪機的輸出功率由原先的 0.8pu 最後降低為由所接的負載而定,而發 電機轉速會因為原動機機械功率減少造成會超越同步速度。發電機激磁電壓,隨著高壓電 動機的起動(會造成端電壓及無效功率變動)而變動,然而發電機端電壓因為有激磁控制 系統所以皆能穩定的維持在 1.0pu 附近;從無限匯流排可觀察到輸出電功率原先從發電機 吸收功率解聯後由匯流排上輸出電功率供給靜態負載,至於無效功率系統原先由無限匯流 排與發電機共同供給整個系統所需的無效功率解聯後由發電機供給整個系統所需的無效功 率。 3. 模擬三 此模擬主要目的在了解汽輪發電機與無限滙流排併聯系統在三相接地故障情況下系統 變數變化的情形。此模擬所使用的參數與增載及卸載運轉模擬相同模擬結果顯示於如圖 14~16 所示。由圖中可看出,故障情況下汽輪機的輸出功率原先由所接的負載而定 20 秒後 增加為 0.8pu,故障發生時輸出功率下降,故障排除後又維持以所接的負載而定。而發電機 轉速故障發生前穩定維持在同步速度,故障發生時由於原動機的響應較慢,因此轉速高於 同步速度,故障排除後經一段時間後轉速會維持同步速度。發電機激磁電壓,隨著高壓電 動機的起動(會造成端電壓及無效功率變動)而變動,故障發生時由於虛功率增加導致激 磁電壓增加,故障排除後維持穩定值。然而發電機端電壓因為有激磁控制系統所以即使故 障發生時虛功率增加導致端電壓下降,故障排除後皆能穩定的維持在 1.0pu 附近;從無限 匯流排可觀察到輸出電功率原先供給匯流排上靜態負載系統併聯後從發電機吸收功率,故 障發生後改由匯流排上輸出電功率供給靜態負載。至於無效功率系統併聯後與發電機共同 供給整個系統所需的無效功率,當故障發生後由發電機供給整個系統所需的無效功率。
(a)汽輪機輸出功率 (e)發電機輸出電功率
(b)發電機轉子轉速 (f)發電機端電壓
(c)發電機激磁電壓 (g)發電機 A 相電流
(d)無限滙流排實功率 (h) 1 號馬達 A 相電流
(a)無限滙流排無效功率 (e) 1 號馬達轉子轉速
(b)無限滙流排 A 相電流 (f) 1 號馬達電磁轉矩
(c) 2 號馬達 A 相電流 (g) 3 號馬達 A 相電流
(d) 2 號馬達轉子轉速 (h) 3 號馬達轉子轉速
(a) 2 號馬達電磁轉矩 (e) 3 號馬達電磁轉矩
(b) 4 號馬達 A 相電流 (f) 5 號馬達 A 相電流
(c) 4 號馬達轉子轉速 (g) 5 號馬達轉子轉速
(d) 4 號馬達電磁轉矩 (h) 5 號馬達電磁轉矩
(a)汽輪機輸出功率 (e)發電機輸出電功率
(b)發電機轉子轉速 (f)發電機端電壓
(c)發電機激磁電壓 (g)發電機 A 相電流
(d)無限滙流排實功率 (h) 1 號馬達 A 相電流
(a)無限滙流排無效功率 (e) 1 號馬達轉子轉速
(b)無限滙流排 A 相電流 (f) 1 號馬達電磁轉矩
(c) 2 號馬達 A 相電流 (g) 3 號馬達 A 相電流
(d) 2 號馬達轉子轉速 (h) 3 號馬達轉子轉速
(a) 2 號馬達電磁轉矩 (e) 3 號馬達電磁轉矩
(b) 4 號馬達 A 相電流 (f) 5 號馬達 A 相電流
(c) 4 號馬達轉子轉速 (g) 5 號馬達轉子轉速
(d) 4 號馬達電磁轉矩 (h) 5 號馬達電磁轉矩
(a)汽輪機輸出功率 (e)發電機輸出電功率
(b)發電機轉子轉速 (f)發電機端電壓
(c)發電機激磁電壓 (g)發電機 A 相電流
(d)無限滙流排實功率 (h) 1 號馬達 A 相電流
(a)無限滙流排無效功率 (e) 1 號馬達轉子轉速
(b)無限滙流排 A 相電流 (f) 1 號馬達電磁轉矩
(c) 2 號馬達 A 相電流 (g) 3 號馬達 A 相電流
(d) 2 號馬達轉子轉速 (h) 3 號馬達轉子轉速
(a) 2 號馬達電磁轉矩 (e) 3 號馬達電磁轉矩
(b) 4 號馬達 A 相電流 (f) 5 號馬達 A 相電流
(c) 4 號馬達轉子轉速 (g) 5 號馬達轉子轉速
(d) 4 號馬達電磁轉矩 (h) 5 號馬達電磁轉矩
模擬結果顯示,此汽輪發電機與無限滙流排併聯系統在三相接地故障情況下的動態特性 與預期一致。此模擬的重點是在觀察故障發生所造成的暫態現象,因此設定故障時間為 0.3 秒。實際的故障持續時間會因保護電驛的特性不同而不同,故障發生的影響大小則視故障時 間地點、接地阻抗以及保護電驛設定而異。
4. 結 論
本論文主要在研究垃圾焚化發電系統在增載、卸載、以及系統故障情形下的動態特性, 並且選定一座由四組廢熱回收鍋爐及一台汽輪發電機、激磁系統、變壓器、電動機、以及靜 態負載所組成的實際系統為研究對象。本研究中除了推導各系統組件的數學模型外,也利用 SIMULINK 及 SimPowerSystems 開發各組件的模型,並且進一步模擬了系統在正常及故障時 的動態特性。結果顯示,在這些運轉的模式下系統的動態特性都是可以接受的,這證實了這 些模組的適用性。此研究最大的價值是可以做為垃圾焚化發電系統規劃、運轉、以及擴充的 重要參考。參考文獻
[1] 章裕民,焚化處理技術,文京圖書有限公司,82 年 11 月。 [2] 曹本善,垃圾焚化廠興建與操作實務,詹氏書局,90 年 6 月。 [3] 曹本善,“垃圾焚化廠汽輪發電機之構造、控制與收益”,機械月刊,第二十四卷第九期, 87 年 9 月,pp.314-325。 [4] 郭景宗,“垃圾焚化廠興建營運民營化後本土技術之發展與市場展望”,機械月刊,第二 十四卷第九期,87 年 9 月,pp.326-331。 [5] 蔡景文,“新的垃圾發電方式及其問題點”,電機月刊,第二卷第二期,81 年 2 月,pp.88-91。[6] Kajikawa, T., “Thermoelectric Power Generation Systems Recovering Heat from Combustible Solid Waste in Japan,” IEEE 15th International Conference on Thermoelectrics, 1996, pp. 343-351.
[7] Palanichamy, C., N. Sunder Babu and C. Nadarajan, “Municipal Solid Waste Fueled Power Generation for India,” IEEE Transactions on Energy Conversion, Vol. 17, No. 4, 2002, pp. 556-563.
[8] Rae G. W., “Waste to Energy: the New Frontier,” Engineering Science and Education, 1994, pp. 105-111.
[9] de Mello, F. P., “Dynamic Models for Fossil Fueled Steam Units in Power Turbine System Studies,” IEEE transactions on Power System, Vol. 6, No. 2, 1991, pp. 753-761.
on Power System, Vol. 6, No. 1, 1991, pp. 66-73.
[11] de Mello, F. P., “Dynamic Models for Combined Cycle Plant in Power System Studies,” IEEE
Transactions on Power System, Vol. 9, No. 3, 1991, pp. 1698-17081.
[12] Hannett, L. N. and A. Khan, “Combined Turbine Dynamic Models Validation from Tests,”
IEEE Transactions on Power System, Vol. 8, No. 1, 1993, pp. 152-158.
[13] Ordys, A. W. et al., Modelling and Simulation of Power Generation Plants, London: Springer-Verlag, 1994.
[14] Moran, M. ichael J. and H. N. Shapiro, Fundamentals of Engineering Thermodynamics, 5th ed., Wiley Press, 2004.
[15] Church, E. dwin F., Steam Turbines, 3rd ed., McGraw-Hill Press, 1950.
[16] Anderson, P. M. and A. A. Fouad, Power System Control and Stability, IEEE Press,1993.
[17] Ong, Chee-Mun, Dynamic Simulation of Electric Machinery Using Matlab/Simulink, McGraw-Hill Book Co., 1998.
[18] Krause, P. C., Analysis of Electric Machinery and Drive System, 2nd ed., McGraw-Hill Book Co., 2001.
[19] IEEE Guide for Identification, Testing and Evaluation of the Dynamic Performance of Excitation Control Systems, ANSI/IEEE Std 421A-1987, June 1978.
[20] IEEE Committee Report, “Excitation System Models for Power System Stability Studies,”