國立聯合大學電資學院
金腦獎參賽作品
超音波自走車製作
參賽者:葉哲甫
指導老師:柳世民
目錄
第一章 緒論. . . 03 1-1 前言. . . 03 1-2 研究動機與目的. . . 03 1-3 研究流程. . . 04 第二章 自走車系統架構. . . 05 2-1 數位電路控制模組. . . 06 2-1-1 MAX II 實驗板簡介. . . 06 2-2 馬達驅動模組. . . 08 2-3 超音波感測模組. . . 08 第三章 自走車硬體架構. . . 10 3-1 馬達驅動模組. . . 12 3-1-1 DC 馬達驅動與齒輪設計. . . 12 3-2 超音波感測模組. . . 14 3-2-1 超音波發射電路設計. . . 14 3-2-2 超音波接收電路設計. . . 16 3-3 電源模組. . . 17 第四章 自走車數位控制電路. . . 18 4-1 馬達控制. . . 18 4-2 除頻控制. . . 18 4-3 防彈跳控制. . . 19 第五章 自走車動作流程與實驗. . . 20 5-1 行走模式. . . 20 5-2 自走車動作流程. . . 20 5-3 實驗結果. . . 22 第六章 結論與未來展望. . . 26 6-1 結論. . . 26 6-2 未來展望. . . 26 參考文獻. . . 28圖目錄
圖 2-1 自走車系統架構圖. . . 05 圖 2-2 自走車上視圖. . . 06 圖 2-3 實驗板外觀圖. . . 07 圖 2-4 自走車底盤視圖. . . 08 圖 2-5 自走車正面實體圖. . . 09 圖 3-1 自走車前視圖. . . 10 圖 3-2 自走車左視圖. . . 11 圖 3-3 自走車右視圖. . . 11 圖 3-4 自走車底盤示意圖. . . 12 圖 3-5 自走車底盤視圖. . . 12 圖 3-6 馬達齒輪組. . . 13 圖 3-7 超音波感測模組方塊圖. . . 14 圖 3-8 超音波發射電路. . . 15 圖 3-9 超音波發射電路實際完成圖. . . 15 圖 3-10 超音波接收電路. . . 16 圖 3-11 超音波接收電路(正). . . 16 圖 3-12 超音波接收電路(反). . . 16 圖 3-13 PB 5000 充電電池. . . 17 圖 4-1 除頻器 1HZ 輸出訊號. . . 18 圖 4-2 load_timing 之 block 所描述之電路方塊圖. . . 19 圖 5-1 自走車行走模式. . . 20 圖 5-2 自走車動作流程圖. . . 21 圖 5-3 直線地形. . . 23 圖 5-4 連續彎路地形. . . 24 圖 5-5 圓形地形. . . 25第一章 緒論
1-1 前言
在現今科技化的社會環境中,許多家電用品都已逐漸朝向自動化
之趨勢,而且許多工作正被自動化的機器所取代。自動化其目的當然
是希望機器能取代人力,達成所希望的任務,讓人們可以節省許多時
間及體力,避免重複性的工作,而且能善用有限的時間及精神,來提
高人們的做事效率及生活品質。在一部自動化的機器裡,所展現的是
不同領域系統的結合,如機構設計、電機控制、數位電路設計、軟體
設計、感測裝置等。
1-2 研究動機與目的
在前言敘述的概念,讓我有一個構想,就是發展出一台具有多用
途之自走車。例如,在自走車上加裝感測器、控制器、傳輸模組或視
頻裝置,使其能傳回影像資料,讓使用者經由遠端監控即可了解自走
車所處之環境,而不需親自到達,可使自走車能依循所希望之模式自
由行走。事實上,在許多危險的環境中執行任務,為了安全性的考量,
是不希望有人員進入,像是具毒性或污染性環境的清除、爆裂物的清
除、海底探勘、採礦、救災等高度危險性工作。此時,利用具遠端監
控的多功能自走車,就能在危險的環境中探測並執行必要的任務或工
作,使人員的意外傷害降低至最小。
當然,上述之自走車功能強大,非一蹴可幾。因此,如何選擇與
製作最基礎的自走車便成為本專題研究的首要目標。例如,搭配超音
波感測器的自走車便能符合這個要求,使自走車在一個未知的環境
中,利用超音波感測外在的障礙物,並快速的閃避障礙物,達到安全
的行走的目的。如能順利完成此專題,未來就能在既有的成果基礎
上,改善缺失,並增加元件與功能,使整個自走車功能更加完備。
1-3 研究流程
本自走車專題報告內容分述如下:第一章緒論包含前言、研究動
機與目的;第二章說明自走車系統架構,整個系統分成數位電路控制
模組、馬達驅動模組、超音波感測模組來介紹;第三章自走車硬體架
構,對本專題所使用到的硬體做一些相關介紹;第四章自走車控制電
路,主要介紹控制電路設計和控制電路VHDL Code;第五章自走車動
作流程與實驗,介紹自走車行走的模式、自走車動作流程,與實驗測
試的結果;第六章結論與未來展望,將本專題做一個總結,並對未來
的研究方向做一個構思。
第二章 自走車系統架構
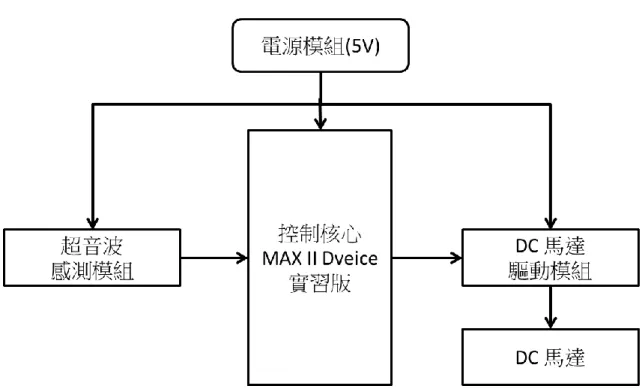
本專題自走車的系統架構,依功能可分為三大部分:數位電路控
制模組 、馬達驅動模組與超音波感測模組。將此三大部分各別測試
驗証,進而整合在一起,便形成一個自走車系統。本自走車的數位電
路控制模組是由MAX II 實習板內的 CPLD (EP M1270 T144C5ES) 為
電路控制核心;馬達驅動模組由是DC馬達和馬達驅動元件組成;超
音波感測模組是由超音波感測元件和超音波驅動電路所組成,圖2-1
是自走車系統架構圖。
2-1 數位電路控制模組
數位電路控制模組是由MAX II實習板來實現。數位電路控制模組
接收來自超音波感應器所偵測到之訊號,得知障礙物的位置,經由程
式判斷後,並將控制訊號傳送至馬達驅動模組,作閃避障礙物的動
作,如圖2-2 自走車上視圖。
圖 2-2 自走車上視圖
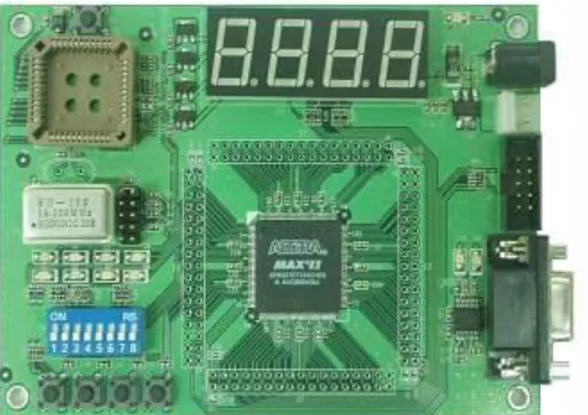
2-1-1 MAX II 實驗板簡介
EPM1270T144C5ES 提供 116 支一般 I/O pin,本實驗板擴充 I/O 部
分分別連接 J1,J2,J3,J4(2 X 17 connector),如此能讓使用人員很容
易的利用此連接器連接至其他電路板,J1 to J4 也提供了 Power Pin 和
GND Pin,Power Pin 提供 3.3V 的電壓,但是沒有過電流保護措施,
假設您的擴充電路板需要從本實驗板提供大電流時(300mA 以上),建
議使用者在自己的擴充電路板準備好電源電路,再將兩邊的地連接在
一起。除了 Power Pin 和 GND Pin 外,J1 to J4 連接器上的其它 Pin 直
接連接至 MAX II Device I/O 上,所以禁止將超過 3.3V 的信號連接至
此連接器。除此之外,部分 Pin 腳除了連接至 MAX II Device 外,也
有連接至實驗板上的其它零件(例如:LED,Push Button 等等),故使
用者也要注意這些零件是否會影響到擴充 I/O 接腳。
2-2 馬達驅動模組
本專題的馬達驅動模組包含了2個DC馬達、齒輪組、輔助輪、驅
動電路。自走車的行走是由數位電路控制模組控制,來完成自走車的
前進、後退、左轉、右轉的行動,所以DC馬達的控制在自走車系統
中是個非常重要的一環,如圖2-4自走車底盤視圖。
圖 2-4自走車底盤視圖
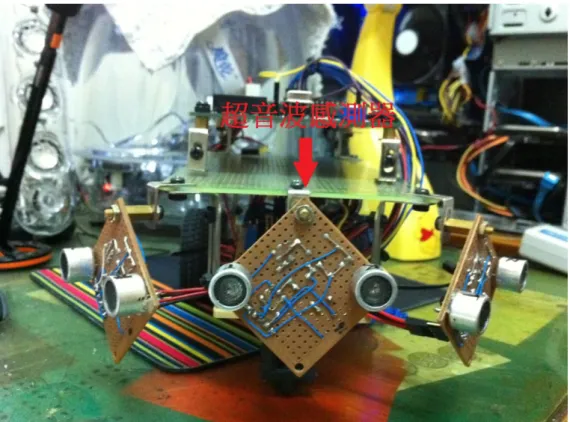
2-3 超音波感測模組
一個良好的控制系統,必須能夠精確的感測系統所需要的資訊,
因此感測器的好壞對於自走車的行動有重大的關西。在本專題中,超
音波感測模組主要的目的是感測外部的障礙物,幫助自走車辨別障礙
物的方位。本專題在自走車上是利用超音波感測器來達成上述的目
的,其裝置情形如圖2-5示。
第三章 自走車硬體架構
本專題自走車是用宮田自走車體,裡面包含兩個 DC 馬達、齒輪
組,輪胎、輔助輪、固定底座。還有 1 張長 16.1 cm、寬 10 cm 的萬
用電路板,來固定 MAX II 實習板,以及放電池。
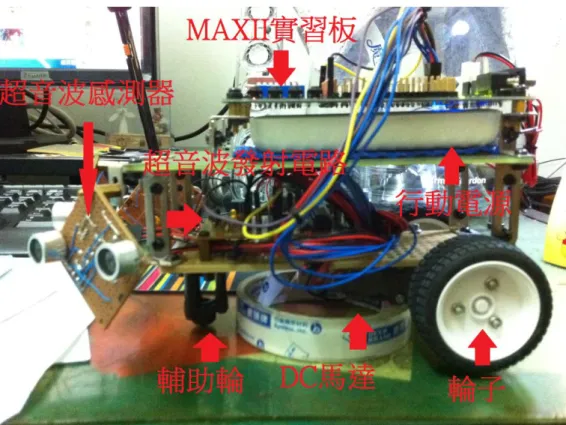
本章主要描述自走車硬體架構,包含馬達驅動模組、超音波感應
器模組與電源模組,分別如圖 3-1、3-2、3-2 所示。
圖 3-1 自走車前視圖
圖 3-2 自走車左視圖
3-1 馬達驅動模組
本自走車使用雙馬達系統,並配合一個輔輪,如此便不用再使用
多餘的動力去做轉向的動作,只要左右輪一前一後便可完成轉向動
作。
圖 3-4 自走車底盤示意圖 圖 3-5 自走車底盤視圖
3-1-1 DC 馬達驅動與齒輪設計
使用 IC L293D 來驅動馬達,比較方便操控馬達正反轉,來控制
自走車的行走方向。
而在齒輪部份,由於本自走車加上周邊電路、電池整體重量並不
是一般小型馬達可以負擔的,因此我選用了日本田宮公司所出的齒輪
組系列,如圖 3-6 所示,而我選用的馬達也是同一家公司所生產的直
流馬達,這個馬達的規格為在額定電壓 5V 時所能提供的力矩為 10
g‧cm 轉速為 15000rpm,再配合齒輪組的減速比例為 203:1 ,因此
一顆馬達所能提供的力矩變為 203*10 = 2030 g‧cm 轉速變為
15000/203=73.89 rpm ,如此一來再配合我所使用的輪胎半徑 2.1 公
分,自走車的行走速度便成為 249.166089.73*2*1.2=...π(公分/
秒),而一顆輪胎能提供的力量則為 2030/2.1=966.67 g,如此便足以
提供自走車行進所需的力量與速度。
3-2 超音波感測模組
本自走車超音波感測模組,包含了超音波發射器與超音波接收
器。使用 555 震盪電路產生 40kHz 的頻率給超音波感測器,使其達到
最佳的發射與接收,當遇到障礙物時,超音波感測器接收到的訊號傳
送給 MAX II 控制電路做相關的運算和處理。圖 3-7 是超音波感測模
組方塊示意圖。
圖 3-7 超音波感測模組方塊圖
3-2-1 超音波發射電路設計
在超音波發射電路的部份,我所使用的接收與發射器接型號為
TX40、TR40,根據 DATA SHEET,使用最佳的發射與接收頻率為 40K
Hz。圖 3-8 超音波發射電路,此電路設計主要是由 IC 555、R5、VR1、
C9 組成一個不穩態多諧震盪器,由 IC 的第三支接腳產生脈波,調
整 VR1 使第三腳輸出脈波為 40.000KHz 至 40.250KHz。其中 C8 為
雜訊抑制濾波器;C7、R4 與 40KHz 超音波產生器配合產生超音波的
輸出,其能量來源由 IC 555 之第 3 腳供應。IC NE555 第 4 腳為 H(High)
時,555 產生震盪,為 L(Low)時停止震盪。
3-2-2 超音波接收電路設計
接收器的部份,由於從超音波接收器所接收到的訊號極小,因此
必須經由後方的放大電路將訊號放大成我們可以處理的大小。超音波
感測器接收到訊號後,經由後方的第一級和第二級的 CE 放大器進行
訊號放大,然後再傳回去 MAX II 控制電路判斷是否前方有障礙物,
加以驅動 DC 馬達,如圖 3-10 示,超音波接收電路。
圖 3-10 超音波接收電路
3-3 電源模組
使用先創 3Dvision 行動電源 PB-5000/PB 5000 充電電池,雙 USB
輸出孔,來當作電源。則 0.5A 的 USB 孔供電給實習板,1A 的 USB
孔供電給 DC 馬達。
圖 3-13 PB 5000 充電電池
產品特性:
◆超大容量: 5000mAh 高容量鋰聚合物電芯。
◆雙 USB 輸出: 可同時為兩款數位設備供電。
◆安全保護: 配有專用鋰電池保護板,有效防止過充、過放、過流、
短路等。
◆即插即用: 採用 USB 端口供電輸出,插上數據線即可實現隨身、
隨時充電。
第四章 自走車數位控制電路
4-1 馬達控制
利用超音波遇到障礙物反射接收到的訊號,傳遞資料給 MAXII
Device 作控制電路的判別,利用 IC L293D 驅動馬達,來閃避障礙
物。
4-2 除頻控制
在 MAX II 實驗板上的石英震盪器之震盪頻率是 16MHz(一秒震
盪 16x10
6次),如果我們想要設計一個 1/(16x10
6)的除頻電路來得到輸
出波形為對稱方波的 1Hz 輸出頻率時,我們可以宣告一個數值為震盪
頻率值一半的整數(即(16x10
6)/2),每當該數值數完一次時就令其對應
的輸出訊號波形發生轉態,那麼當計數完震盪頻率的數值時輸出訊號
恰完成一個週期的正反變化,如此一來我們便能輕易地得到 1Hz 的方
波訊號了。
1/(16x106 ) (1/(16x106 ))/2 (1/(16x106 ))/24-3 防彈跳控制
掃描信號 fs 同時當作案件彈跳處理之取樣信號,按鍵按下後經彈
跳處理後之負緣觸發信號 dsb_press 會比按鍵編碼值之產生延遲 1~2
個 fs 週期,因此可利用 deb_press 的負緣來載入案件編碼值至暫存器
中。
圖 4-2 load_timing 之 block 所描述之電路方塊圖
第五章 自走車動作流程與實驗
5-1 行走模式
本專題所製作的自走車是以 MAX II 實習板內的 CPLD (EPM1270
T144C5ES) 為控制核心,接收來自超音波感測器偵測之訊號,得知障
礙物的位置,由控制電路來控制 DC 馬達, 達到閃避障礙物的動作,
以保持行車安全,最後能安全地抵達終點。圖 5- 1 顯示的 5 個例子。
圖 5-1 自走車行走模式
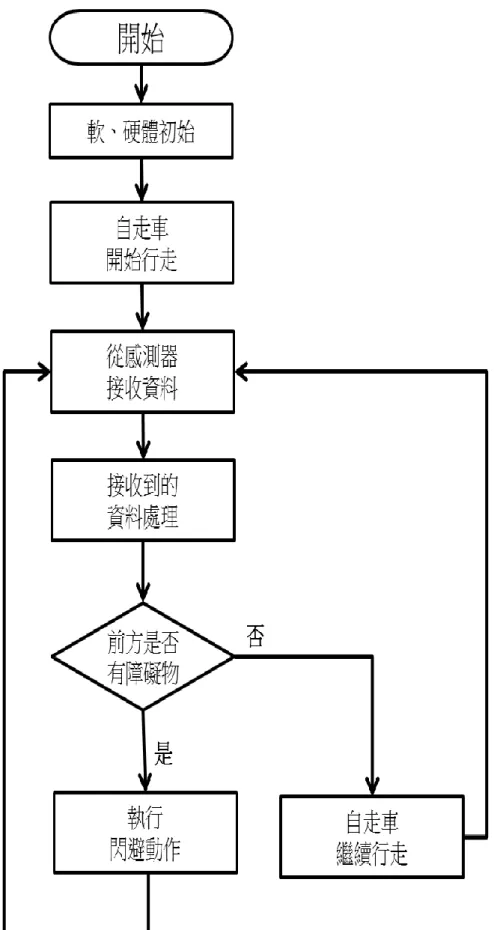
5-2 自走車動作流程
當自走車開始行走時,會經由超音波來偵測周圍的環境,是否有
障礙物,來閃避障礙物或繼續直行如圖 5-2 自走車動作流程圖,來達
到行車安全。
5-3 實驗結果
以下是自走車實地行走實驗,安排了 3 種不同的地形行走,然後
有相同的地形但不同的跑法,因此有 5 種情形(圖 5-1 所示) a.直線地
形(圖 5-3 所示),因為沒有障礙物的阻擋所以一直往終點前進; b.
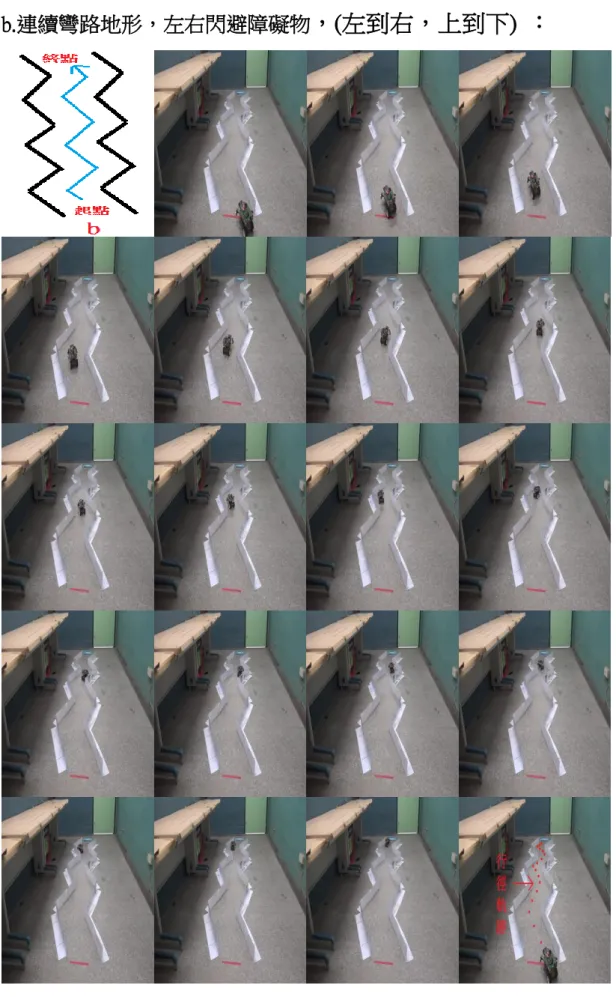
連
續彎路地形(圖 5-4 所示),當自走車走了一小段路就遇到障礙物,所
以自行車行走時會左右閃避,從起點安全行走到終點, b-1.則是從終
點跑回到起點; c.圓圈地形(圖 5-5 所示),自走車逆時鐘行走圓圈的
地形,沿者旁邊地形從起點繞了一圈安全回到起點, c-1.則是順時鐘
行走圓圈地形。最後討論自走車是否達到所需的要求動作,以下照片
的順序以由左到右、從上到下排序。
b.連續彎路地形,左右閃避障礙物
,(左到右,上到下)
:
c.圓形地形,沿者障礙物行走,(左到右,上到下):
第六章 結論與未來展望
6-1 結論
由第5章的實驗證實,自走車搭配超音波感測器,能偵測前方和
左右兩方的方向是否有障礙物,並將感測器所得到資訊交由MAX II
實驗板之CPLD進行運算和處裡,之後執行閃避障礙物的動作,達到
快速安全的行走至終點。
在本專題中我對馬達模組、超音波模組、電源模組、車體架構及
軟硬體實務已有相當程度的了解,也提升了本人在系統整合與獨立研
究之能力,對於未來持續研究有相當大的幫助。
6-2 未來展望
本專題之自走車雖已日趨穩定,但還有許多之功能未盡完善,為
了使自走車能夠更多功能,能在既有成果的基礎上,改善缺失,並增
加元件與功能,使整個系統更加完備,以期能應用在更實際的場合或
環境。在車體架構是使用萬用電路板,因此在擴充方面也相當方便,
但車身卻越來越高其為缺點。
以下針對整體系統方面,提出可以增加的元件及功能,並加以討論:
a. 在馬達軸上安裝編碼器,以求更精確的位置與速度控制。
b. 可以使用紅外線感應器,作為近距離障礙物感測,而超音波感測
器當作遠距離障礙物感測,並可以建立動態地圖。
c. 安裝小型攝影機,增加對外界的感知能力,以利於車子可以進入
危險環境工作,以防人員的危險。
d. 建立無線傳輸和控制,可以將動態地圖攝影資訊傳送遠端電腦,
進行遠端控制。
參考文獻
[1] 超音波元件: http://www.100y.com.tw/viewmat3.asp?mat3=46CA [2] 除頻器: http://tube.ee.tku.edu.tw/~microlab/%B7L%B3B%B2z%BE%F7%B9%EA%C5%E7/Slide/ UE501-CH03.ppt#264,8,投影片 8 [3] 超音波感應器: http://mmrl.cgu.edu.tw/rehab/mme/rehab/organize/chap2/sensor/no1/no1_3.htm [4] 自走車材料: http://w3.hyivs.tnc.edu.tw/pic/line_tracer/line_tracer.htm [5] 超音波電路: http://tw.myblog.yahoo.com/lk-hsu/article?mid=920&sc=1 [6] l293d datasheet: thttp://datasheet.emcelettronica.com/ti/L293D [7] 555 datasheet: http://www.alldatasheet.com/view.jsp?Searchword=555 [8] 4069 datasheet: http://www.datasheetarchive.com/4069-datasheet.html [9] 陳瓊興,”電子學實驗(下)”,全華科技圖書館股份有限公司。 [10] 鄭光欽/黃孝祖,”CPLD 與 VHDL 設計實務”,全威圖書,2001。 [11] 歐謙敏,”CPLD 數位系統設計:使用 Max+plusII”,台科大圖書,2001。 [12] 廖裕評/陸瑞強,”CPLD 數位電路設計:使用 Max+plusII”,全華科技圖書, 2002。 [13] 王建校/寧改娣,”MAX+PLUSII 應用入門”,1999。 [14] 呂學坤/高立數,位積體電路設計與實習:使用 ALTERA MAX+PLUSII 與 AHDL 硬體描述語言,1998。 [15] 陳巧茵,小型自走車以超音波避障之研究,成功大學工程科學研究所碩士論 文,2002。[16] 楊雅兆,”使用超音波感測之自走車避障實務設計”,中原大學機械工程學 系碩士學位論文,2004。 [17] 張嘉義,”無人自走車系統設計與行為反應控制”,逢甲大學 機械工程 研究所,2003。 [18] 傅培耕,”即時物體追蹤視覺導引自走車”,中原大學 機械工程學系,2004。 [19] 陳彥儒,”超音波感測器為基礎之自走車路徑規劃與導引”,大同大學 機 械工程研究所,2005。 [20] 林于琬,”以超音波感測器建立自走車環境地圖之研究”,國立成功大學 工程科學系,2005。