IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003 283
Adaptive Fuzzy Sliding Mode Controller for
Linear Systems With Mismatched
Time-Varying Uncertainties
C. W. Tao, Mei-Lang Chan, and Tsu-Tian Lee, Fellow, IEEE
Abstract—A new design approach of an adaptive fuzzy sliding
mode controller (AFSMC) for linear systems with mismatched time-varying uncertainties is presented in this paper. The coef-ficient matrix of the sliding function can be designed to satisfy a sliding coefficient matching condition provided time-varying uncertainties are bounded. With the sliding coefficient matching condition satisfied, an AFSMC is proposed to stabilize the uncer-tain system. The parameters of the output fuzzy sets in the fuzzy mechanism are on-line adapted to improve the performance of the fuzzy sliding mode control system. The bounds of the uncertain-ties are not required to be known in advance for the presented AFSMC. The stability of the fuzzy control system is guaranteed and the system is shown to be invariant on the sliding surface. Moreover, the chattering around the sliding surface in the sliding mode control can be reduced by the proposed design approach. Simulation results are included to illustrate the effectiveness of the proposed AFSMC.
I. INTRODUCTION
S
INCE the time-varying uncertainties (structured or unstruc-tured) are inevitable in many practical linear systems, the control of the linear systems with time-varying uncertainties has been an important research topic in the engineering area [15], [19]. In the past several decades, the variable structure with sliding mode has been effectively applied to control the systems with uncertainties because of the intrinsic nature of robustness of the variable structure with sliding mode [2], [14], [18], [22]. When the system reaches the sliding mode, the system with variable structure control is insensitive to the external disturbances and the variations of the plant parameters [16]. Moreover, the variable structure system can be invariant to the uncertainties in many cases [10]. However, the sliding mode control suffers from the problem of chattering, which is caused by the high-speed switching of the controller output in order to establish a sliding mode. The undesirable chattering may excite the high-frequency system response [3], [7] and result in unpredictable instabilities. Furthermore, most of the uncertain systems with the traditional sliding mode controlManuscript received January 14, 2002; revised April 28, 2002. This work was supported in part by the National Science Council of Taiwan, R.O.C., through Grant NSC 89-2213-E-197-004 and in part by the Ministry of Education of Taiwan under Grant EX-91-E-FA06-4-4. This paper was recommended by Associate Editor W. Pedrycz.
C. W. Tao and M.-L. Chan are with the Department of Electrical Engineering, National I-Lan Institute of Technology, I-Lan 260, Taiwan, R.O.C. (e-mail: [email protected]).
T.-T. Lee is with the Department of Electrical and Control Engineering, Na-tional Chiao-Tung University, Hsinchu 300, Taiwan, R.O.C.
Digital Object Identifier 10.1109/TSMCB.2003.810443
techniques require that the uncertainties satisfy the matching conditions. This would limit the application of the sliding mode control.
The fuzzy techniques [6] have been widely applied to the systems with uncertainties. Recently, researchers have utilized the fuzzy techniques together with the sliding mode control for many engineering control systems. Hwang et al. designed a fuzzy controlled low-pass filter to smooth the output from a sliding mode controller (SMC) [12]. In [21], the sliding mode control schemes with fuzzy system are proposed with the uncer-tain system function is approximated by the fuzzy system . The fuzzy control rules based on the sliding function and the deriva-tive of the sliding function are constructed in [11]. It can be seen that fuzzy techniques have been incorporated with the sliding mode control as the fuzzy sliding mode control to alleviate the chattering in the pure sliding mode control [8], [13], [17], [20]. Also, the utilization of the fuzzy techniques can release the lim-itation on the known bounds of uncertainties which is required for the traditional SMC [5]. However, the determination of the parameters in the fuzzy SMC is not trivial. The complexity of the fuzzy SMC is increased quickly as the number of sliding functions increases.
In this paper, a new adaptive fuzzy sliding mode controller (AFSMC) for linear systems with mismatched time-varying uncertainties is proposed. The coefficient matrix of the sliding function can be designed to satisfy a sliding coefficient matching condition [1] provided time-varying uncertainties are bounded. With the sliding coefficient matching condition satisfied, a stability guaranteed SMC can be constructed if the necessary information of the uncertainties is assumed to be available. Since the assumptions may be too limited in the real application, a fuzzy SMC is proposed based on the analysis of the system characteristics to release some of the limitations. The parameters of the output fuzzy sets in the fuzzy SMC are on-line adapted with the approach in [9] extended to minimize the decreasing rate of the square of sliding function for the case with multi-dimensional sliding function vectors. The on-line parameter adaptive process simplifies the design of the fuzzy sliding mode control system. The stability of the fuzzy control system is guaranteed and the system is shown to be invariant on the sliding surface. Moreover, the chattering around the sliding surface in the sliding mode control can be reduced by the proposed design approach. Simulation results are included to illustrate the effectiveness of the proposed AFSMC.
The remainder of this paper is organized as follows. The system model considered in this paper and the sliding coef-1083-4419/03$17.00 © 2003 IEEE
284 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
Fig. 1. Block diagrams of (a) the sliding mode control system and (b) the adaptive fuzzy sliding mode control system.
ficient matching condition are described in Section II. The reaching mode of the SMC is discussed in Section III. The AFSMC is designed in Section IV. Also in Section IV, the sliding mode of the proposed AFSMC is guaranteed. Moreover, the characteristics of the adaptive fuzzy sliding mode control system on the sliding surface are also described in Section IV. In Section V, simulation results of the illustrative examples are presented. Finally, conclusions are presented in Section VI.
II. THESYSTEMMODELDESCRIPTION
In this section, the uncertain linear system with the mismatched uncertainties satisfying the sliding coefficient matching condition [1] is described. Let the state equation of the linear system with the only mismatched time-varying
uncertainties [4], be
(1) where the state vector is and the control input vector
is . The constant matrices are assumed to be
known with proper dimensions. Furthermore, it is assumed that is controllable and has full rank. With a nonsingular state transformation matrix , (1) is transformed into the regular form
(2) where
and
It can be easily seen that satisfies the
clas-sical matching condition, since the matrix is nonsingular.
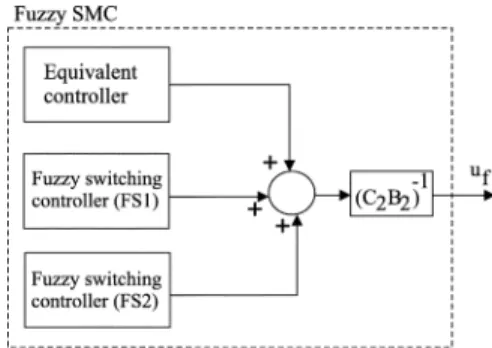
Fig. 2. Stucture of fuzzy sliding mode controller.
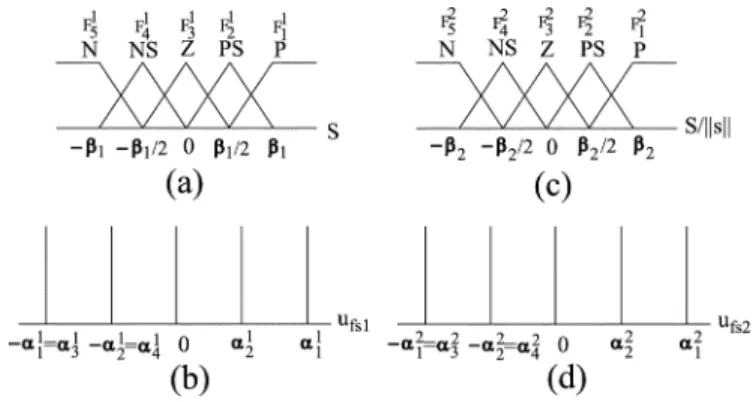
Fig. 3. Input and output membership functions.
The mismatched time-varying uncertainty is assumed, as in [15], to have the structure
(3) with the constant matrices and the uncertain matrix
satisfying
where is the corresponding identity matrix. Moreover, the rank of needs to satisfy
The matrices do not have zero column vectors or zero row vectors. As in our previous paper [1], the sliding surface is designed to be
(4) with being an invertible matrix. In the following, the sliding coefficient matching condition is reviewed and the system considered in this paper is defined.
Definition 1: (Sliding Coefficient Matching Condition [1]): For the uncertainty and the sliding function , the sliding coefficient matching condition is defined as
(5) That is
TAO et al.: AFSMC FOR LINEAR SYSTEMS LINEAR SYSTEMS 285
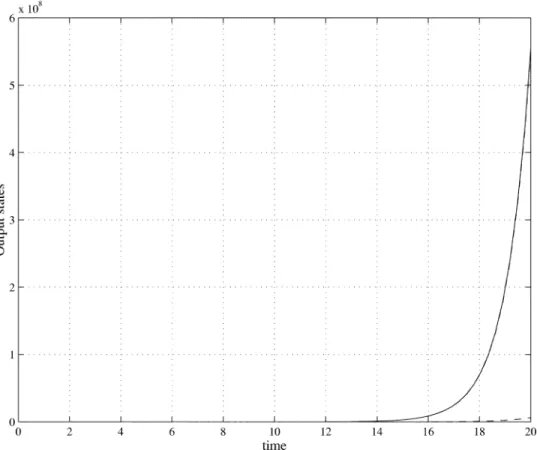
Fig. 4. States of the open-loop system:x (solid line), x (dash-dot line), and x (dashed line). Definition 2: (SCMCS System): For a sliding mode
control system with the state equation in (2) and the
sliding function , if the mismatched
uncer-tainty satisfies the
sliding coefficient matching condition, then the sliding mode control system is called a sliding coefficient matched control system (SCMCS).
III. THEREACHING MODE OF THESLIDINGMODE
CONTROLSYSTEM
It is known that the sliding mode of the uncertain system with an SMC [in Fig. 1(a)] is guaranteed if
Lemma 1 [15]: If , then
With Lemma 1 applied, the sliding mode reaching condition of a system SCMCS becomes
(7) Since satisfies the traditional matching condition, the assumption
is a constant scalar is made as usual [10]. Furthermore, we can assume that
if if Therefore
286 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
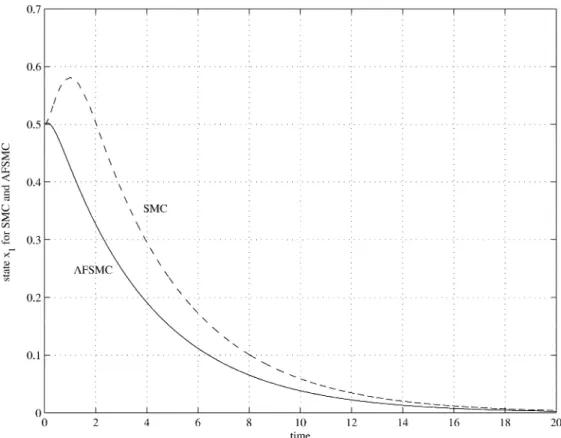
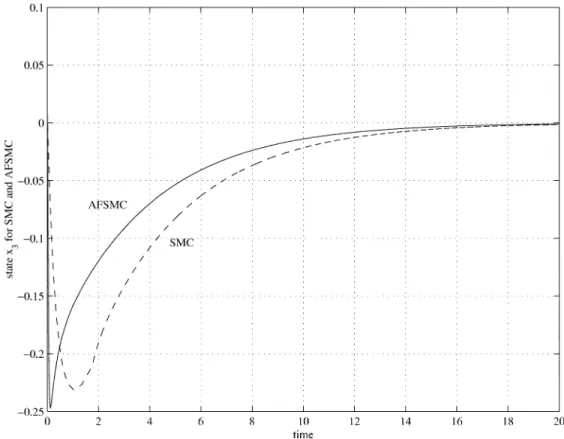
Fig. 5. Performance comparison for statex of the uncertain system with SMC and AFSMC.
where
and
Since and are Hermitian and positive semidefinite, it is reasonable to assume that
and (9)
where is the identity matrix with the corresponding dimension. Thus, unlike the exactly known matrices required in [1], the sliding mode can be guaranteed in Theorem 1 with only the
known bounds of and .
Theorem 1: For an uncertain system SCMCS, if the output of the SMC is designed to be
(10) then
(11) and the sliding mode for the variable structure control of the linear uncertain system is guaranteed.
It can be seen from Theorem 1 that the bounds of the mis-matched uncertainty and the matched uncertainty are necessary to be available in order to design the SMC to make the system SCMCS approach the sliding mode. To alleviate the difficulties in the design of SMC for the system SCMCS, the AFSMC is designed in the next section.
IV. ADAPTIVEFUZZYSLIDINGMODECONTROLLER(AFSMC) The block diagram of the uncertain system with the AFSMC is shown in Fig. 1(b). The AFSMC is a fuzzy SMC with an adaptive mechanism to adjust the parameters in the fuzzy SMC. As in Fig. 2, the fuzzy SMC is designed to have an equivalent controller and two fuzzy switching controllers, . The
output of the fuzzy SMC is defined as times the
sum of the equivalent control and the outputs of
the fuzzy switching controllers , i.e.,
with
1) Fuzzy Switching Controllers: Let the input and switching output variable of the fuzzy switching controller be simply partitioned into fuzzy sets (negative), (zero), and (positive). The triangular-type input membership functions and the membership functions for output fuzzy singletons are shown in Fig. 3(a) and (b). From (8), it is easy to see that in order to
TAO et al.: AFSMC FOR LINEAR SYSTEMS LINEAR SYSTEMS 287
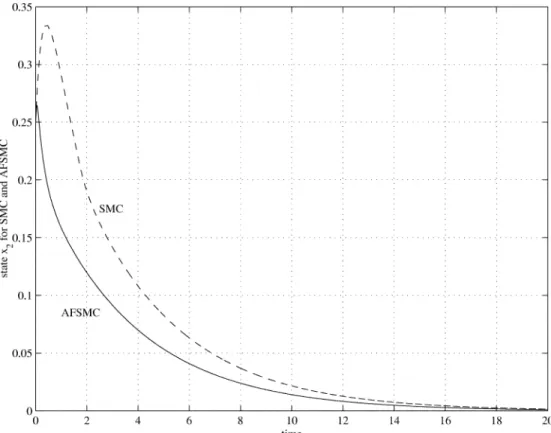
Fig. 6. Performance comparison for statex of the uncertain system with SMC and AFSMC.
make to guarantee the sliding mode of SCMCS, the
fuzzy rules can be derived as the following.
1) If is , then is .
2) If is , then is .
3) If is , then is .
With the centroid defuzzification technique, the switching output of the fuzzy SMC is calculated as
(12)
where are input membership
functions, are diagonal matrices with the
cor-responding values of output fuzzy singletons on the diagonal cells, and is a matrix function to generate a diagonal matrix with the elements of the vector on the corresponding diagonal cells. Note that the denominator of in (12) is equal to an identity matrix, since the triangular membership functions are designed as in Fig. 3(a). Thus, can be simplified as
(13)
For the switching controller , the input variable is defined as . Similar to the design of the fuzzy switching controller , the fuzzy rules for the switching controller are the following.
1) If is , then is .
2) If is , then is .
3) If is , then is .
The input and output membership functions for are shown in Fig. 3(c) and (d). Thus, the output of the switching controller
is
(14)
2) On-Line Adaptation Mechanism: To simplify the design of the fuzzy switching controllers, in (13) and in (14), are considered to be a scalar (times an identity ma-trix). As in Fig. 3, the values of the output fuzzy singletons are
specified to be symmetrical to zero .
Furthermore, it is known that the outputs of the fuzzy switching controllers are zero when the system is in the sliding mode . Thus, the outputs of the fuzzy switching functions and can be simplified as
and
(15)
where are column vectors with the
mem-bership values of the corresponding fuzzy sets of the elements
in vectors and , respectively. Note that and
are negative. The parameter of the fuzzy switching con-troller is on-line adjusted. To minimize the reaching rate of the sliding mode with respect to , the adaptive laws are
288 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
Fig. 7. Performance comparison for statex of the uncertain system with SMC and AFSMC.
and
(16)
where denotes positive learning rate. From (16), it can be easily seen that and are always negative when is not
zero and when . This adaptation makes
the system reach the sliding mode quicker when the sliding function is getting smaller, and the system performance is then improved. Moreover, the chattering can be alleviated with this adaptation mechanism since and are small when the sliding function is large at the beginning of the system operation. With this proposed AFSMC, the sliding mode of the system SCMCS is guaranteed, as described in Theorem 2.
Theorem 2: The uncertain system SCMCS with the AFSMC can have its sliding mode guaranteed.
Proof: The output of the AFSMC is
(17)
Then, the reaching rate of the sliding mode is
(18)
It is known that if then (see Fig. 3). Since
Furthermore, because is getting more and more neg-ative with the adaptive law in (16), the term
is going to be negative when
Likewise, if , the second term in (18) becomes
negative when
Thus, the reaching rate of the sliding mode is negative in
the case of and . If , then
. is becoming more negative by following the adaptive law, and finally will be larger than . In this case
TAO et al.: AFSMC FOR LINEAR SYSTEMS LINEAR SYSTEMS 289
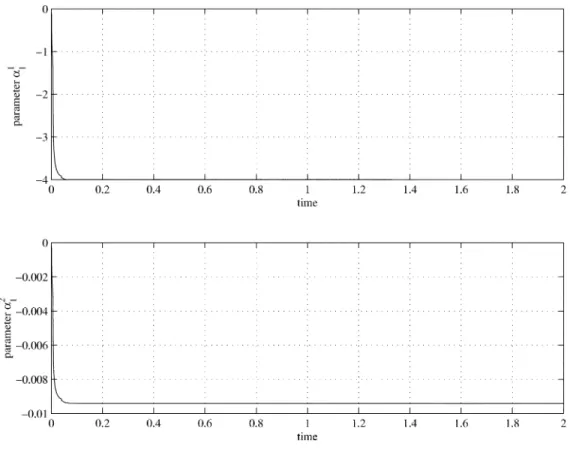
Fig. 8. Parameters and .
Fig. 9. (a) Control action of AFSMC. (b) Control action of AFSMC (close to steady state). (c) Control action of SMC. (d) Control action of SMC (close to steady state).
290 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
Fig. 10. Performance comparison for statex of the uncertain system with SMC and AFSMC.
Fig. 11. (a) Control action of AFSMC. (b) Control action of AFSMC (close to steady state). (c) Control action of SMC. (d) Control action of SMC (close to steady state).
TAO et al.: AFSMC FOR LINEAR SYSTEMS LINEAR SYSTEMS 291
With the same idea, the second term in (18) can become neagtive
when and . Again, and
the sliding mode of the uncertain system SCMCS is guaranteed
while and . It can be easily proven with
the same approach that the sliding mode of the uncertain system SCMCS using the AFSMC is guaranteed in other cases.
Note that even the bounds and are used for the proof of the guarantee of sliding mode, and are not used for the design of the proposed AFSMC for SCMCS. Therefore, the requirement of the uncertainty bounds is no longer necessary for AFSMC.
3) Characteristics of the SCMCS With AFSMC on the Sliding Surface: In Theorem 3, the invariant characteristic of the SCMCS with an AFSMC is described.
Theorem 3: A linear uncertain system SCMCS (see Sec-tion II) with an AFSMC is invariant with respect to time-varying uncertainties on the sliding surface.
With the same approach as in [1], the proof of Theorem 3 can be derived. In order to have the adaptive fuzzy sliding con-trol system be asymptotically stable on the sliding surface, the eigenvalues of the matrix
need to be all negative. This condition can be satisfied with the proper selection of the sliding coefficient matrix [1]. The illustrative examples are included in the next section to demon-strate the effectiveness of the adaptive fuzzy sliding controllers designed here.
V. SIMULATIONRESULTS
Let the uncertain linear system be described by (1) with
and
(19) From (19), it is easy to see that is a mismatched time-varying uncertainty, and the mismatched uncertainty
can be represented as
(20) where
Thus, the sliding coefficient matrix can be designed to be
to satisfy the sliding coefficient matching condition. Simula-tion results are provided for the open-loop system, closed-loop sliding mode control system, and adaptive fuzzy sliding mode control system, respectively. Fig. 4 illustrates that the open-loop uncertain system with initial conditions
is unstable.
Fig. 12. Membership functions for AFSMC with five rules. A. Sliding Mode Controller (SMC)
Since
and
(21) the control action is designed to be
(22)
with and . Note that if , then
the chattering of the control action will be increased. Fig. 5 illustrates how the unstable system is stabilized when the sliding mode control is applied.
B. Adaptive Fuzzy Sliding Mode Controller (AFSMC) The output of the AFSMC is
(23) with the adaptive laws
(24) Note that the learning rates are selected with very small values as the initial learning rates. Then, the learning rates are increased to reduce the overshoot and the rising time of the control system. If (the control action is too large and is over the limit) or (the chattering of the control action is large) then the learning rates are decreased. Since the parameters of the input member-ship functions [see Fig. 3(a)] has the effect of a boundary layer,
292 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
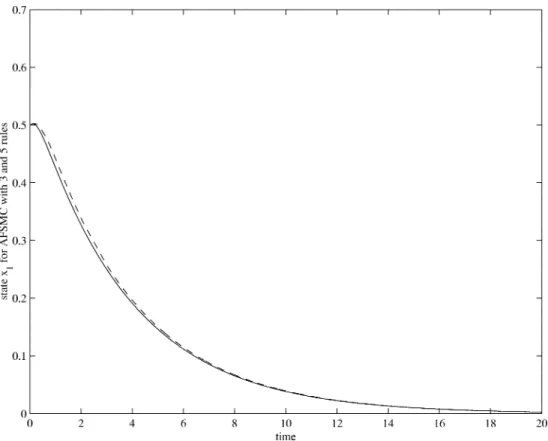
Fig. 13. Performance of the AFSMC with three rules (solid line) and five rules (dashed line).
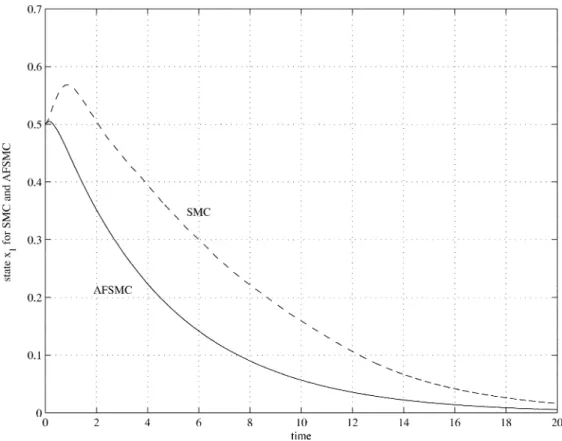
is designed because . The performance
com-parisons for each state of the uncertain system with SMC and AFSMC are provided in Figs. 5–7. In Fig. 5, it is shown that the uncertain system with AFSMC has better per-formance than the uncertain system with the SMC in the sense of smaller undershoot and shorter rising time. The parameters and are indicated in Fig. 8 to empirically conform so that the sliding mode is guaranteed. The control actions and of AFSMC and SMC are illustrated in Fig. 9(a) and (c). The con-trol actions close to the steady state for the system with AFSMC and SMC are emphasized in Fig. 9(b) and (d). It can be seen in Fig. 9(b) and (d) that the chattering is reduced for the uncertain system with the AFSMC. Moreover, it is easy to verify that the reduced system matrix on the sliding surface is
which is stable.
C. Simulations With Another Type of Uncertainties
Let and be two uncorrelated and uniformally
dis-tributed random processes with . Then,
an-other type of uncertainty matrix
(25)
is adopted for simulations. Likewise, is easy to be shown as a mismatched time-varying uncertainty, and the mismatched uncertainty can be partitioned as
(26) where
From (26), the sliding coefficient matrix can be designed to have
and the sliding coefficient matching condition is satisfied. Then, the control action for SMC becomes
With the same adaptive laws in (24), and in AFSMC are adjusted to be 3.9945 and 0.0096, respectively. The perfor-mance comparison for state between SMC and AFSMC is shown in Fig. 10, and the control actions of SMC and AFSMC are shown in Fig. 11. From Figs. 10 and 11, AFSMC is seen to have better performance than SMC.
D. An Example of AFSMC With More Than Three Rules To indicate the effect of the number of fuzzy rules on the per-formance of the AFSMC, an example is implemented. In this example, the input and output spaces of the fuzzy switching
TAO et al.: AFSMC FOR LINEAR SYSTEMS LINEAR SYSTEMS 293
controllers are partitioned as in Fig. 12. Thus, five rules are con-structed for each switching controller. With the adaptive laws
(27)
the parameters are adjusted to the following values:
For simplicity, only the performance comparison of the state between the AFSMC with three and five rules is shown in Fig. 13. From Fig. 13, it can be seen that the performance of AFSMC with more rules is not necessarily better. Moreover, the forms of the membership values are more complicated for the AFSMC with more than three rules. Thus, to showing the guaranty of the sliding mode of the AFSMC with more than three rules is not as easy as in Section IV. However, we would not claim that the AFSMC with three rules is the best structure that AFSMC can have.
VI. CONCLUSION
In this paper, an AFSMC is proposed for the linear systems with mismatched time-varying uncertainties. The sliding coef-ficient matching condition is provided. The sliding mode of the uncertain system with the proposed AFSMC is guaranteed. The requirement of the available uncertainty bounds for the design of the traditional SMC is not necessary for the AFSMC. The system is shown to be invariant and stable on the sliding sur-face when the new matching condition is matched. Furthermore, the chattering around the sliding surface for the adaptive fuzzy sliding mode control is reduced. Simulation results are included to illustrate the effectiveness of the proposed SMC.
REFERENCES
[1] M. L. Chan, C. W. Tao, and T. T. Lee, “Sliding mode controller for linear systems with mismatched time-varying uncertainties,” J. Franklin Inst., vol. 337, pp. 105–115, 2000.
[2] S. P. Chan, “An approach to perturbation compensation for variable structure systems,” Automatica, vol. 32, no. 3, pp. 469–473, 1996. [3] F. J. Chang, S. H. Twu, and S. Chang, “Adaptive chattering alleviation of
variable structure systems control,” Proc. Inst. Elect. Eng. D, vol. 137, pp. 31–39, Jan. 1990.
[4] H. H. Choi, “An explicit formula of linear sliding surfaces for a class of uncertain dynamic systems with mismatched uncertainties,”
Auto-matica, vol. 34, no. 8, pp. 1015–1020, 1998.
[5] F. Da, “Decentralized sliding mode adaptive controller design based on fuzzy neural networks for interconnected uncertain nonlinear systems,”
IEEE Trans. Neural Networks, vol. 11, pp. 1471–1480, Nov. 2000.
[6] D. Driankov, H. Hellendoorn, and M. Reinfrank, An Introduction to
Fuzzy Control. New York: Springer-Verlag, 1993.
[7] M. D. Espana, R. S. Ortega, and J. J. Espino, “Variable structure systems with chattering reduction: A microprocessor-based design,” Automatica, vol. 20, no. 1, pp. 133–134, 1984.
[8] J. S. Glower and J. Munighan, “Designing fuzzy controllers from a vari-able structures standpoint,” IEEE Trans. Fuzzy Syst., vol. 5, pp. 138–144, Feb. 1997.
[9] S. J. Huang and K. S. Huang, “An adaptive fuzzy sliding-mode controller for servomechanism disturbance rejection,” IEEE Trans. Ind. Electron., vol. 48, pp. 845–852, Aug. 2001.
[10] J. Y. Hung, W. Gao, and J. C. Hung, “Variable structure control: A survey,” IEEE Trans. Ind. Electron., vol. 40, pp. 2–21, Feb. 1993. [11] G. C. Hwang and S. C. Lin, “A stability approach to fuzzy control design
for nonlinear systems,” Fuzzy Sets Syst., vol. 48, no. 3, pp. 279–287, 1992.
[12] Y. R. Hwang and M. Tomizuka, “Fuzzy smoothing algorithms for vari-able structure systems,” IEEE Trans. Fuzzy Syst., vol. 2, pp. 227–284, Nov. 1994.
[13] C. L. Hwang and C. Y. Kuo, “A stable adaptive fuzzy sliding mode con-trol for affine nonlinear systems with application to four-bar linkage sys-tems,” IEEE Trans. Fuzzy Syst., vol. 9, pp. 238–252, Apr. 2001. [14] T. T. Lee and K. Y. Tu, “Design of a fuzzy logic controller as a suction
controller,” Fuzzy Sets Syst., vol. 91, no. 3, pp. 305–317, 1997. [15] J. C. Shen, “Designing stabilising controllers and observers for uncertain
linear systems with time-varying delay,” Proc. Inst. Elect. Eng., vol. 144, pt. D, pp. 331–334, July 1997.
[16] J. J. Slotine and W. Li, Applied Nonlinear Control. Englewood Cliffs, NJ: Prentice-Hall, 1991.
[17] F. C. Sun, Z. Q. Sun, and G. Feng, “An adaptive fuzzy controller based on sliding mode for robot manipulators,” IEEE Trans. Syst., Man, Cybern., vol. 29, pp. 661–667, Oct. 1999.
[18] V. I. Utkin, “Variable structure systems with sliding modes,” IEEE
Trans. Automat. Contr., vol. AC-22, pp. 212–221, Apr. 1977.
[19] G. Wheeler, C. Y. Su, and Y. Stepanenko, “A sliding mode controller with improved adaptation laws for the upper bounds on the norm of un-certainties,” in Proc. Amer. Control Conf., Albuquerque, NM, June 1997, pp. 2133–2137.
[20] R. R. Yager and D. P. Filev, Essentials of Fuzzy Modeling and
Con-trol. New York: Wiley, 1994.
[21] B. Yoo and W. Ham, “Adaptive fuzzy sliding mode control of nonlinear system,” IEEE Trans. Fuzzy Syst., vol. 6, no. 2, pp. 315–321, 1998. [22] K. D. Young and U. Ozguner, “Sliding mode design for robust linear
optimal control,” Automatica, vol. 33, no. 7, pp. 1313–1323, 1997.
C. W. Tao received the B.S. degree in electrical
engineering from National Tsing Hua University, Hsinchu, Taiwan, R.O.C., in 1984, and the M.S. and Ph.D. degrees in electrical engineering from the University of New Mexico, Albuquerque, in 1989 and 1992, respectively.
Currently, he is an Associate Professor with the Department of Electrical Engineering, National I-Lan Institute of Technology, I-Lan, Taiwan. His current research is on the fuzzy systems including fuzzy control systems and fuzzy neural image processing.
Dr. Tao is the Associate Editor of the IEEE TRANSACTIONS ONSYSTEMS, MAN, ANDCYBERNETICS.
Mei-Lang Chan received the B.E. degree from the
Department of Industrial Education, National Taiwan Normal University, Taipei, Taiwan, R.O.C., in 1979, and the M.S. and Ph.D. degrees from the Department of Electrical Engineering, National Taiwan Univer-sity of Science and Technology, Taipei, in 1992 and 2000, respectively.
He was a Lecturer from 1992 to 2000. He is now an Associate Professor at National I-Lan Institute of Technology, I-Lan, Taiwan. His current research in-terests include sliding mode control, adaptive control, and fuzzy systems.
294 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 33, NO. 2, APRIL 2003
Tsu-Tian Lee (M’87-SM’89-F’97) was born in
Taipei, Taiwan, R.O.C., in 1949. He received the B.S. degree in control engineering from the National Chiao Tung University (NCTU), Hsinchu, Taiwan, in 1970, and the M.S. and Ph.D. degrees in electrical engineering from the University of Oklahoma, Norman, in 1972 and 1975, respectively.
In 1975, he was appointed Associate Professor and in 1978 Professor and Chairman of the Department of Control Engineering at NCTU. In 1981, he became Professor and Director of the Institute of Control En-gineering, NCTU. In 1986, he was a Visiting Professor and in 1987, a Full Pro-fessor of Electrical Engineering at University of Kentucky, Lexington. In 1990, he was a Professor and Chairman of the Department of Electrical Engineering, National Taiwan University of Science and Technology (NTUST). In 1998, he became the Professor and Dean of the Office of Research and Development, NTUST. Since 2000, he has been with the Department of Electrical and Con-trol Engineering, NCTU, where he is now a Chair Professor. He has published more than 180 refereed journal and conference papers in the areas of automatic control, robotics, fuzzy systems, and neural networks. His current research in-volves motion planning, fuzzy and neural control, optimal control theory and application, and walking machines.
Prof. Lee received the Distinguished Research Award from National Science Council, R.O.C., in 1991–1992, 1993–1994, 1995–1996, and 1997–1998, and the Academic Achievement Award in Engineering and Applied Science from the Ministry of Education, R.O.C., in 1998. He was elected to the grade of IEEE Fellow in 1997 and IEE Fellow in 2000. He became a Fellow of New York Academy of Sciences (NYAS) in 2002. His professional activities include serving on the Advisory Board of Division of Engineering and Applied Sci-ence, National Science Council, serving as the Program Director, Automatic Control Research Program, National Science Council, and serving as an Ad-visor of Ministry of Education, Taiwan, and numerous consulting positions. He has been actively involved in many IEEE activities. He has served as Member of Technical Program Committee and Member of Advisory Committee for many IEEE sponsored international conferences. He is now a Member of the Admin-istrative Committee of the IEEE Systems, Man, and Cybernetics Society.