國
立
交
通
大
學
機械工程學系碩士班
碩 士 論 文
加勁板之彈性支承的剛度在均勻橫向負載
下的最佳化分析
Optimization of the stiffness of elastic restraints of
stiffened plate under uniform lateral load
研 究 生:劉宗帆
指導教授:蕭國模 博士
加勁板之彈性支承的剛度在均勻橫向負載下的最佳化分析
Optimization of the stiffness of elastic restraints of stiffened
plate under uniform lateral load
研究生:劉宗帆 Student:Zong-Fan Liu
指導教授:蕭國模 博士 Advisor:Dr. Kuo-Mo Hsiao
國立交通大學 機械工程學系碩士班
碩士論文
A Thesis
Submitted to Department of Mechanical Engineering College of Engineering
National Chiao Tung University in Partial Fulfillment of the Requirements
for the Degree of Master of Science
in
Mechanical Engineering July 2005
Hsinchu, Taiwan, Republic of China
加勁板之彈性支承的剛度在均勻橫向負載下的最佳化分析 研究生:劉宗帆 指導教授:蕭國模博士
國立交通大學機械工程學系碩士班
摘要
本研究的主要目的是將加勁板之彈性支承的剛度最佳化,使加勁板在 均勻橫向力(uniform lateral load)作用時,其彈性支承有均勻的位移。本研究將加勁板視為板與梁的組合,將彈性支承視為直線彈簧。本研 究採用線性有限元素法分析邊界上具彈性支承的加勁板。 本研究採用平面三角殼元素與開口薄壁梁元素來模擬加勁板,在梁元 素與板元素的結合處有共同節點及相同自由度,即梁元素的節點位於殼的 中心而且有三個平移及三個旋轉自由度。 本研究中提出一個以彈性支承剛度為變數的目標函數及其拘束條件。 本研究利用牛頓法提出一個數值程序以求得使目標函數有最小值且滿足拘 束條件的彈性支承剛度,即求得最佳化的彈性支承剛度。本研究以數值例 題探討不同加勁板之最佳化的彈性支承剛度,彈性支承變形的分佈及加勁 板的最大撓度。
Optimization of the stiffness of elastic restraints of stiffened plate
under uniform lateral load
Student:Zong-Fan Liu Advisor:Dr. Kuo-Mo Hsiao
Department of Mechanical Engineering
National Chiao Tung University Hsinchu, Taiwan
ABSTRACT
In order to unify deformation of the elastic restraints for stiffened plates with
elastically restrained edges under uniform lateral load, the stiffness of the elastic
restraints is chosen to be the design variables and an optimization method is
proposed to find the optimal stiffness of elastic restraints.
The stiffened plate is composed of a plate and stiffeners. The stiffeners and
the elastic restraints are taken to be beams and linear spring, respectively. The
finite element method is used here for the linear analysis of stiffened plate.
The triangular flat shell element and the thin-walled beam element are used here.
Because the nodes of the beam element must coincide with those of the shell
element, the nodes of the beam element are shifted to the mid-plane of the plate. A numerical procedure based on the Newton method is proposed to find the optimal stiffness of the elastic restraints. Numerical examples are studied to demonstrate the accuracy of the proposed method and to investigate the
distribution of the optimal stiffness of the elastic restraints, the deformation of the elastic restraints and deflection of the stiffened plate for stiffened plate with different number of stiffeners, different cross section of stiffeners and different thickness of plate.
誌謝
衷心感謝指導教授 蕭國模博士的指導與教誨,使的本論文得以順利的完 成。在這兩年碩士班期間,讓我印象最深的是老師在研究上嚴謹的態度及對我 們這群學生的日常生活上的關懷,都使我受益良多,在此至上最高的謝意與敬 意。感謝口試委員蕭德瑛老師、蔣長榮老師及尹慶中老師對本論文所提出的指 正與建議,使的本論文能夠更瑧完善。 感謝陳弘虎、蔡明旭、李政道、劉峰成、陳致中學長的引領照顧,以及學 弟楊禮龍、可愛衡、楊水勝在學業上的砥礪與成長。 感謝父母親、妹妹及所有關心我的朋友對我的支持與鼓勵,僅以此成果與 榮耀,獻給我親愛的父母以及所有關心我的人。目 錄 中文摘要 ... Ⅰ 英文摘要 ... Ⅱ 致謝 ... Ⅳ 目錄 ... Ⅴ 表目錄 ... Ⅶ 圖目錄 ... Ⅹ 第一章 緒論 ... 1 第二章 理論推導... 4 2.1 座標系統... 4 2.2 三角平面殼元素 ... 4 2.2.1 殼的基本假設 ... 4 2.2.2 殼元素變形的描述 ... 5 2.2.2.1 常應變三角元素(CST)... 5 2.2.2.2 DKT 元素的變形描述 ... 7 2.2.3 元素內力與元素剛度矩陣... 11 2.2.3.1 CST 元素之節點內力與剛度矩陣 ... 12 2.2.3.2 DKT 元素之節點內力與剛度矩陣 ... 12 2.3 梁元素... 13 2.3.1 梁元素的基本假設 ... 14 2.3.2 梁元素之變形描述 ... 14 2.3.3 梁元素節點位移向量與剛度矩陣 ... 15 2.4 彈性支承的平移彈簧常數及彈簧元素 ... 19 2.5 系統平衡方程式 ... 20 2.6 彈簧元素剛度的最佳化及目標函數 ... 21
第三章 數值計算方法與程序 ... 25 第四章 數值例題與結果 ... 27 4.1 收斂性與準確性分析 ... 28 4.2 彈性支承之剛度的最小值及初始值對其最佳化結果的影響 ... 29 4.3 不同加勁板的撓度及其最佳化的彈性支承剛度 ... 31 第五章 結論與展望... 33 參考文獻 ... 34 附表……… 36 附圖 ... 63 附錄 A DKT 的形狀函數 ... 88 附錄 B CST 的剛度矩陣 ... 94 附錄 C WT 型鋼之斷面常數... 95
表目錄
表一 不同加勁板的自重(a=1.2m,ρ(iron)=7.7×104N m3).... 36 表二 彈性支承之kmin對最佳化的影響(nr =7, 7 6 × WT ,tp =8mm) ... 37 表三 彈性支承之kmin對最佳化的影響(nr =7, 7 6 × WT ,tp =8mm) ... 38 表四 彈性支承之Kini對其最佳化的影響(nr =7, 7 6 × WT ,tp =10mm,Kmin=10N mm) ... 39 表五 彈性支承之Kini對其最佳化的影響(nr =7, 7 6 × WT ,tp =10mm,kmin=10N mm)... 40 表六 彈性支承之剛度Kini對其最佳化的影響(nr =7, 7 6 × WT ,tp =10mm,Kmin =10N mm) ... 41 表七 彈性支承之Kini對其最佳化的影響(nr =4, 7 5 . 4 × WT ,tp =6mm, kmin=10N mm)... 42 表八 彈性支承之Kini對其最佳化的影響(nr =4, 7 5 . 4 × WT ,tp =6mm,kmin=10N mm) ... 43 表九 彈性支承之Kini對其最佳化的影響(nr =7, 7 6 × WT ,tp =10mm,Kmin=10N mm) ... 44 表十 不同加勁板在不同斷面的垂直位移(WT4 ×7.5, p t = 10mm,kini − N1) ... 45 表十一 不同加勁板在不同斷面的垂直位移(WT4 ×7.5, p t = 8mm,kini − N1) ... 46 表十二 不同加勁板在不同斷面的垂直位移(WT4 ×7.5,p t = 6mm,kini − N1) ... 47 表十三 不同加勁板在不同斷面的垂直位移(WT5 ×6, p t = 10mm,kini − N1) ... 48 表十四 不同加勁板在不同斷面的垂直位移(WT5 ×6, p t = 8mm,kini − N1) ... 49 表十五 不同加勁板在不同斷面的垂直位移(WT5 ×6, p t = 6mm,kini − N1) ... 50 表十六 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 10mm,kini − N1) ... 51 表十七 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 8mm,kini − N1) ... 52 表十八 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 6mm,kini − N1) ... 53 表十九 不同加勁板在不同斷面的垂直位移(WT4 ×7.5, p t = 10mm,kini −U2) ... 54 表二十 不同加勁板在不同斷面的垂直位移(WT4 ×7.5, p t = 8mm,kini −U2) ... 55 表二十一 不同加勁板在不同斷面的垂直位移(WT4 ×7.5, p t = 6mm,kini −U2) ... 56 表二十二 不同加勁板在不同斷面的垂直位移(WT5 ×6, p t = 10mm,kini −U2) ... 57 表二十三 不同加勁板在不同斷面的垂直位移(WT5 ×6, p t = 8mm,kini −U2) ... 58 表二十四 不同加勁板在不同斷面的垂直位移(WT5 ×6,
p t = 6mm,kini −U2) ... 59 表二十五 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 10mm,kini −U2) ... 60 表二十六 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 8mm,kini −U2) ... 61 表二十七 不同加勁板在不同斷面的垂直位移(WT6 ×7, p t = 6mm,kini −U2) ... 62
圖目錄 圖 1.1 真空腔體示意圖 ... 63 圖 1.2 簡支單層板反力分佈 ... 63 圖 2.1 三角殼元素的示意圖及節點自由度 ... 64 圖 2.2 DKT 元素的節點及其三邊上的局部座標示意圖 ... 65 圖 2.3 變形前板元素中心面之單位法向量n受旋轉 向量θ作用的示意圖 ... 66 圖 2.4 加勁板節點位置示意圖 ... 67 圖 2.5 元素座標與元素截面座標... 68 圖 2.6 單位長度的 O 形環 ... 69 圖 2.7 彈簧元素之節點內力 ... 69 圖 4.1 加勁板結構示意圖 ... 70 圖 4.2 端點受單位力的懸臂梁 ... 71 圖 4.3 受一大氣壓均佈橫向力的加勁板... 72 圖 4.4 加勁板之對稱軸的撓度分佈... 72 圖 4.5 加勁板通過彈簧的變形分佈... 73 圖 4.6 彈性支承之kmin對最佳化的影響(一)(nr =7, 7 6 × WT ,tp =8mm)... 74 圖 4.7 彈性支承之kmin對最佳化的影響(二)(nr =7, 7 6 × WT ,tp =8mm)... 74 圖 4.8 彈性支承之kmin對最佳化的影響(三)(nr =7, 7 6 × WT ,tp =8mm)... 75 圖 4.9 彈性支承之kmin對最佳化的影響(四)(nr =7, 7 6 × WT ,tp =8mm)... 75 圖 4.10 不同加勁板在斷面CC 的撓度 (WT4 ×7.5, 1 N Kini − )... 76 圖 4.11 不同加勁板之最佳化的彈簧剛度(WT4 ×7.5,
1 N Kini − )... 77 圖 4.12 不同加勁板在斷面CC 的撓度 (WT5 ×6, 1 N Kini − )... 78 圖 4.13 不同加勁板之最佳化的彈簧剛度(WT5 ×6, 1 N Kini − )... 79 圖 4.14 不同加勁板在斷面CC 的撓度 (WT6 ×7, 1 N Kini − )... 80 圖 4.15 不同加勁板之最佳化的彈簧剛度(WT6 ×7, 1 N Kini − )... 81 圖 4.16 不同加勁板在斷面CC 的撓度 (WT4 ×7.5, 2 U Kini − )... 82 圖 4.17 不同加勁板之最佳化的彈簧剛度(WT4 ×7.5, 2 U Kini − )... 83 圖 4.18 不同加勁板在斷面CC 的撓度 (WT5 ×6, 2 U Kini − )... 84 圖 4.19 不同加勁板之最佳化的彈簧剛度(WT5 ×6, 2 U Kini − )... 85 圖 4.20 不同加勁板在斷面CC 的撓度 (WT6 ×7, 2 U Kini − )... 86 圖 4.21 不同加勁板之最佳化的彈簧剛度(WT6 ×7, 2 U Kini − )... 87
第一章 緒 論 板與殼在結構工程系統中,長久以來一直扮演著非常重要的腳 色,由於其擁有極佳的重量強度比率,所以不論是機械、航太、建築、 車輛船舶及土木工程上皆有很廣泛的利用。 在 TFT-LCD 產業中製造面板裝置的真空腔體(Vacuum Chamber) 其容器蓋即可視為板結構(如圖 1.1),此真空腔體在密合時是採用 O 型 環(O-ring)密合,即將容器蓋壓於 O 型環上,而 O 型環可視為板結構 的 彈 性 支 承 。 當 真 空 腔 體 抽 成 真 空 時 , 容 器 蓋 會 受 到 一 大 氣 壓 2 5 10 013 . 1 m N
× 的均佈橫向力(uniform lateral load),故在設計及分析
該容器蓋時可將其視為具彈性支承的板結構受均佈橫向力的作用。在 抽真空時為了避免空氣進入,所以 O 型環必須受到足夠的壓力,且 O 型環的尺寸很小,所以其壓縮量及容器蓋的變形都必須在一定的範圍 內的小變形,故在分析時應可以用線性分析。 當板受均佈橫向力時,其橫向變形與跨度的四次方成正比,與厚 度三次方成反比,所以對小型真空腔體,容器蓋即使採用單層薄板亦 不會有變形太大或太重的問題。但隨 TFT-LCD 的進步,我們對面板 尺寸要求越來越高,其真空腔體的容器蓋的尺寸可達2.5m×2.5m,如 板厚不變,其最大撓度約為1 ×m 1m之板的最大撓度的 40 倍,為了避 免發生大撓度與節省材料,通常需在板上面加勁條(stiffener),提高其 勁度。 由板殼理論[1]中得知,四邊為簡支承的薄板受均佈橫向力時,在 支承邊的中點有最大的向上分佈反力,四邊端點會產生向下的集中支 撐反力(如圖 1.2),因簡支承可視為具無限大剛度的均勻彈性支承,所 以當均勻彈性支承的剛度很大時,其支承反力分佈應與簡支板的反力 相似,但 O 型環並不能提供向下的反力,所以 O 型環剛度太大時,平
板在四邊端點附近將向上翹起,造成真空腔室漏氣,為了要保持真 空,我們須讓 O 型環都是在受壓狀態之下,這可由減小 O 型環的剛度 來達成,但均勻剛度的 O 型環在四邊中點有最大的壓縮位移,若均勻 減少 O 型環剛度使四邊端點有足夠的壓縮量時,四邊中點的壓縮量可 能太大,所以大型容器蓋之 O 型環也許不能使用均勻的 O 型環,如何 調整 O 型環的剛度分佈,使 O 型環在均佈壓力下有適當的壓縮量,應 是一個值得探討的問題,文獻上有很多具彈性支承之板結構的振動與 挫屈的研究 [2-10],但據本文所知並無探討板之彈性支承的變形分佈 之研究。所以本研究將以板之彈性支承的剛度當作設計變數,提出一 個目標函數,藉由目標函數的最小化,使彈性支承有一均勻的預設變 形。 本研究分析時採用有限元素法,本研究將加勁板的加勁條視為 梁,將彈性支承設為線性彈簧,本研究假設加勁板與彈性支承都是小 位移,故僅使用線性分析。 文獻上有關殼元素的研究有很多[11-15],在文獻[11]中提出一個 簡單且每一個節點有 3 個旋轉及 3 個平移自由度的三節點平面三角元 素處理線性與非線性分析,其元素剛度矩陣是將薄膜與彎矩剛度矩陣 疊加而成,並利用更新拉格蘭日法(updated Lagrangian formulation)使 該元素可用於分析具大位移及大旋轉的薄殼結構。由文獻[11]的結果 可以發現其所使用的三角平面殼元素,對薄殼結構的線性或非線性的 分析都有很好的結果且該元素簡單、計算量小且收斂快速,故本研究 採用文獻[11]提出的三節點平面三角形殼元素來模擬加勁板之板的部 份,因本研究將加勁條視為梁,所以梁元素的節點與殼元素的節點位 置及自由度需一致,即位於殼的中心而且有三個平移及三個旋轉自由 度。本研究擬採用開口斷面的薄壁梁當加勁條,故將文獻[16]所提的
開口薄壁梁元素加以修改來模擬加勁條,因文獻[16]之梁元素的節點 在梁斷面的剪心,所以本研究中將其節點移到殼斷面中心,並修改其 剛度矩陣,使其適合本研究的需要。 本研究將在第二章中大略介紹本文所使用的平面三角殼元素並 推導梁元素節點位置改變時,對應於新舊節點之元素剛度矩陣間的轉 換關係,最後,以彈性支承的剛度當作變數,提出一個使彈性支承有 一預設均勻位移的的目標函數。在第三章中提出一個解最佳化問題的 數值程序,本研究的數值計算方法是基於牛頓-拉福森(Newton- Raohson)法的迭代法。在第四章中以數值例題探討不同加勁板之最佳 化的彈性支承剛度,彈性支承變形分佈與加勁板的最大撓度。
第二章 理論推導 因本研究將加勁板視為梁與板的組合,所以採用文獻[11]中提出 的平面三角殼元素及文獻[16]中提出之開口薄壁梁元素的線性部份並 加以必要的修改。為了本文的完整性,在本章將簡單描述文獻[11]之 殼元素變形的假設、內力及剛度矩陣的推導並簡單描述文獻[16]的梁 元素及推導本文所修改的部份。 2.1 座標系統 為了描述系統的運動以及元素的變形,本文定義了兩組座標系 統: (a) 固定總體座標系統:XiG ( =i 1,2,3) 結構體所有節點的座標、系統的邊界條件與其他座標系統的基 底,均在此座標系統中定義。 (b) 元素座標系統:xiE ( =i 1,2,3) 此座標系統是建立在每一殼元素及梁元素上,殼元素及梁元素之 元素座標系統的定義方式將分別於 2.2 及 2.3 節中介紹。元素變形、 元素內力與元素剛度矩陣是在此座標系統中定義,然後經由標準的座 標轉換,轉換至對應總體座標系統。 2.2 平面三角殼元素 2.2.1 殼的基本假設 文獻[11]中對其平面三角殼元素的變形,做了以下的假設: (1) 薄膜變形(membrane deformation)以及彎曲變形(bending deformation)之間無耦合作用。 (2) 殼元素的變形為小變形。
(3) 在元素變形前,垂直於元素中心面的法向線段,在元素變形後, 依然保持直線,且沒有伸長及縮短,除了在元素三個頂點以及三個邊 的中央點外,該線段不必垂直於變形後的中心面。 2.2.2 殼元素變形的描述 如圖 2.1 所示之殼元素中心面上有三個節點,其元素座標的 原點是在元素節點 1,x1E軸即是元素節點 1 與元素節點 2 的連線,x2E 軸是在元素平面上垂直於x1E軸且朝著元素節點 3 的方向,x3E軸則是 由x1E軸及x2E軸外積而得。本殼元素每個節點有 6 個自由度,分別是 E x1 、x2E、x3E軸方向的位移u 、j v 、j wj( j =1,2 3 )以及繞, E x1 、x2E、 E x3 軸方向的位移轉角θxj、θyj、θzj( j =1,2 3, )。本殼元素的變形可分
為薄膜變形(membrane deformation)與彎曲變形(bending deformation) 兩部份,由基本假設(1)可知本元素的變形可由薄膜變形及彎曲變形疊 加而成。本元素的薄膜變形是採用常應變三角形元素(CST, constant strain triangle) [13]的薄膜變形,彎曲變形是採用文獻[12]中的 DKT
(discrete Kirchhoff theory)三角形殼元素的彎曲變形。
在圖 2.1 中的元素節點位移u 與j v 是j CST 元素節點位移,而θxj、
yj
θ 以及w 為在[12]中的 DKT 元素節點位移,j θzj是為了不使元素剛度
內的面內旋轉剛度(in-plane rotational stiffness)為 0,而人為加上去的 自由度。在本文以下的推導中元素變形、元素內力以及元素剛度矩陣 都是在元素座標上定義。
2.2.2.1 常應變三角元素(CST)
因為 CST 元素內的應變為常數,所以其位移場為線性位移場, 並可表示成:
u=a1+a2x+a3y (2.2.1) v=a4 +a5x+a6y (2.2.2) 其中u 跟 v 為在x1E軸與x2E軸方向的位移,x 與 y 是元素內任意點的座 標值,a (i =1,2,K,6) i 是未定常數。 由元素座標的定義可知,在元素座標中圖 2.1 的節點 1、節點 2、 節點 3 之座標值可表示成(0,0)、(x2,0)、(x3,y3),令節點 j 在x1E軸、 E x2 軸的位移分別是uj ,vj (j =1,2,3)。 本文中{}代表行矩陣。將三個節點的座標值及節點位移 ) 3 , 2 , 1 ( ,v j = uj j 代入(2.2.1)式、(2.2.2)式可以得到 = 3 2 1 3 3 2 3 2 1 1 0 1 0 0 1 a a a y x x u u u (2.2.3) = 6 5 4 3 3 2 3 2 1 1 0 1 0 0 1 a a a y x x v v v (2.2.4) 由(2.2.3)、(2.2.4)式可將ai( =i 1,2,...., )6 表示成u 及i v 的函數, i 所以(2.2.1)、(2.3.2)式可改寫成: u =Num (2.2.5) u ={u,v} (2.2.6) N = 3 2 1 3 2 1 0 0 0 0 0 0 N N N N N N (2.2.7) u ={m u1 v1 u2 v2 u3 v3
}
(2.2.8)1 ( 2 3 3 2 3 ) 3 2 1 x y xy x y x y y x N = − − + 1 ( 3 3 ) 3 2 2 xy x y y x N = − 3 3 y y N = (2.2.9) CST 元素的應變包含在x1E軸與x2E軸方向的應變εx與εy以及剪 應變γxy,因本文中假設元素的變形為小變形,所以εx、εy、γxy可 表示成: x u x ∂ ∂ = ε , y v y ∂ ∂ = ε , x v y u xy ∂ ∂ + ∂ ∂ = γ (2.2.10) 將(2.2.5)式代入(2.2.10)式得到: m m m B u ε = (2.2.11) ε =m {εx ,εy ,γxy} (2.2.12) Βm= x y x y x y y y y x x x N N N N N N N N N N N N , 3 , 3 , 2 , 2 , 1 , 1 , 3 , 2 , 1 , 3 , 2 , 1 0 0 0 0 0 0 − − + − − + − − = 0 0 0 0 0 0 0 0 1 2 3 3 3 3 2 2 3 3 2 3 3 3 2 x y x y x x x x x x y y y x (2.2.13) 其中B 稱為 CST 元素的位移-應變轉換矩陣。 m 2.2.2.2 DKT 元素的變形描述
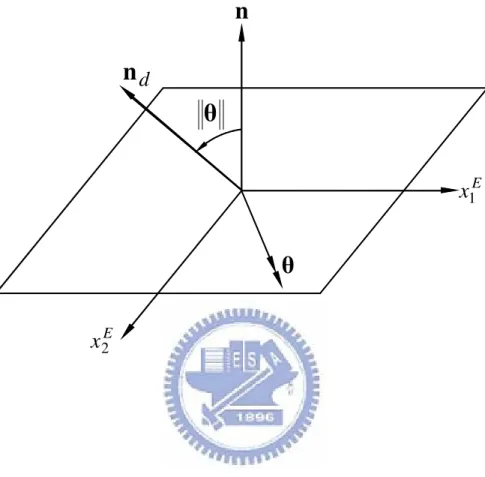
圖 2.2 所示為文獻[12]中所提出的 DKT 板元素,節點 1、2、3 是 三角形的三個頂點,節點 4、5、6 為三角形三個邊的中點,這三個中 點的自由度僅在元素推導的過程中暫時使用,在最後不會出現在元素 的節點自由度。在圖 2.3 中,n 為殼元素中心面變形前的單位法線向 量,n′ 為n 在元素變形後的新位置,圖 2.3 中θ 為一在 E E x x1 − 2 平面上 的旋轉向量[17],將θ 作用在n 可將n 轉到n′ 。由 2.2.1 的假設(3)可知 垂直於變形前的元素中心面法線向量變形後仍為直線且長度不變,所 以當 θθθθ <<1 時,DKT 元素的位移場可表示成: ) , (x y z u= θy v=−zθx(x,y) w =w(x,y) (2.2.14) 其中 x、 y 、z 為元素上任一點分別在x1E、x2E、x3E軸的座標值,θy是 θ 在x1E軸方向的分量,θx是 θ 在x2E軸方向的分量, u 是在x1E軸方向 的位移, v 是在 E x2 軸方向的位移, w 是在x3E軸方向位移。當 θθθθ <<1 時,θy與θx可視為法向量 n 繞x1E軸及x2E軸的轉角。 DKT 元素的應變變形包含面內(in plane)正應變εx、εy與剪應變 xy
γ 以及橫向剪應變(transverse shear strain)γyz、γxz。
因本文假設元素的變形為小變形,εx、εy和γxy可表示成(2.2.10) 式,γyz、γxz可表示成: z u x w xz ∂ ∂ + ∂ ∂ = γ z v y w yz ∂ ∂ + ∂ ∂ = γ (2.2.15) 將(2.2.14)式代入(2.2.10)式可得: κ εb =z (2.2.16) εb ={εx ,εy ,γxy} (2.2.17) } , , {θy,x −θx,y θy,y −θx,x = κ (2.2.18) 將(2.2.14)式代入(2.2.15)式可得:
γ ={γxz ,γyz}={w,x +θy , w,y −θx} (2.2.19) 由(2.2.14)式可知 w、θy、θx與x3E無關,所以可由(2.2.19)式知橫向剪 應變在厚度方向為常數。 本文中稱圖 2.2 中沿著元素邊緣方向s為切線方向,而垂直於元 素邊緣方向 n 為法線方向。 在[12]中對於其所提出的 DKT 元素做了下列的假設: (1) θy、θx在元素內為二次變化,也就是:
∑
= = 6 1 i yi i y Nθ θ ;∑
= − = 6 1 i xi i x Nθ θ (2.2.20) 其中θyi、θxi是θy、θx在圖 2.2 中節點i 的節點值,Ni(i =1−6)為形 狀函數[12],其表示式詳見附錄 A。 (2) 元素的三個頂點以及三個邊的中點滿足克希霍夫板理論(Kirchhoff plate theory)的假設,即
(a) 在三個頂點 γxzi =w,xi +θyi =0 i =1,2,3 (2.2.21a) γyzi =w,yi −θxi =0 i =1,2,3 (2.2.21b) 其中w 、xi w 、yi θyi、θxi分別是 ( ) x w wx ∂ ∂ = 、 ( ) y w wy ∂ ∂ = 、θy、θx在節 點 i 的值。 (b) 在三個邊的中點 0 , = + −θnk wsk k =4,5,6 (2.2.22a) 0 , = + nk sk w θ k =4,5,6 (2.2.22b) 其中θnk、θsk分別是θn、θs在節點k的值,θn與θs分別是 θ 在 n 與 s 方 向的分量,w,sk、w,nk分別是 , ( ) s w ws ∂ ∂ = 、 , ( ) n w wn ∂ ∂ = 在節點 k 的值。
(3) w 在元素邊緣的方向上是呈現三次變化,也就是: sj j ij si i ij sk w w l w w l w, , , 4 1 2 3 4 1 2 3 − + − − = (2.2.23) 其中w 、i w 是 w 在節點 i 及 j 的值,j w,sk是w,s在節點 k 的值, 6 , 5 , 4 = k 分別為邊 23、邊 31、邊 12 的中點,ij 邊為節點i 與節點 j 之間的邊(見圖 2.2),其中i =1−3, j =1−3且i ≠ j。 (4) θs在元素邊緣是呈現線性變化,即: ) ( 2 1 sj si sk θ θ θ = + (2.2.24) 其中θsk、θsi、θsj分別是θs在節點 k 、i 、 j 之值,θs是 θ 在 s 方向的 分量,在圖 2.2 中節點k =4,5,6分別為邊 23、邊 31、邊 12 的中點。 在圖 2.2 中元素三個邊上的
θ
y、θx與θs、θn之幾何轉換關係可 表示成: − = s n y x c s s c θ θ θ θ (2.2.25) x w, 、w,y與w,s、w,n的幾何轉換關係為: − = s n y x w w c s s c w w , , , , (2.2.26) 其中c=cosαij、s=sinαij,αij為元素的邊 ij 上的法線n 與ij x1E軸的 夾角,見圖 2.2。 由(2.2.21)-(2.2.26)式可以把(2.2.19)式表示成[12]: b T x y H (ξ ,η)u θ = b T y x H (ξ ,η)u θ =− (2.2.27) = b u [w1 θx1 θy1 w2 θx2 θy2 w3 θx3 θy3] (2.2.28) 其中u 為 DKT 元素的節點位移,b H 與x H 是對應於元素節點位移的y新形狀函數,其表示式詳見附錄 A,ξ與η是元素內任一點在元素自 然座標[12]的座標值,其中1≤ξ ≤0、1≤η ≤0。 將(2.2.27)式代入(2.2.18)式可以得到: κ =Bbub (2.2.29) 其中B 為 DKT 元素的位移-應變轉換矩陣,表示式為: b + + − + − = T y T x T x T y T y T x b y x x x x y A ξ η ξ η ξ ξ η ξ , 3 , 2 , 3 , 2 , 3 , 3 2 1 ) , ( H H H H H H B (2.2.30) 其中 2 3 2y x A = 為三角形面積。 2.2.3 元素內力與元素剛度矩陣 本文中殼元素的節點內力是由 CST 及 DKT 元素的節點內力組成 而成,元素剛度矩陣是由 CST 元素剛度矩陣k 、DKT 元素剛度矩陣m b k 以及面內旋轉剛度kθz所疊加而成,kθz為一3 × 的對角矩陣,其3 對角線元素的值是取k 之對角線元素的絕對值中的最小值。本節中b 將用虛功原理推導 CST 元素及 DKT 元素的節點內力及剛度矩陣。 在平面應力狀態,等向性線彈性材料的應變與應力關係為 ε E σ = (2.2.31) } , , {σx σy τxy = σ (2.2.32) } , , {εx εy γxy = ε (2.2.33) − − = 2 1 0 0 0 1 0 1 1 2 ν ν ν ν E E (2.2.34)
式之ε 可以是(2.2.12)式中的ε 及(2.2.17)式中的m ε 。 b 2.2.3.1 CST 元素之節點內力與剛度矩陣 將(2.2.31)式代入(2.2.11)式可得 σm =EBmum (2.2.35) 由虛功原理可得 dV V m t m m t mf =
∫
ε σ u δ δ (2.2.36) } { m1 m2 m3 m f f f f = fmi ={fxj fyj} j=1,2,3 (2.2.37) 其中f 是 CST 元素對應於m δum的節點內力,V 是元素的體積。 將(2.2.11)式、(2.2.35)式代入(2.2.36)式可得 dV V m m t m t m m t mf = u∫
B EB u u δ δ (2.2.38) 由(2.2.38)式可得 fm =kmum (2.2.39) dV V m t m m =∫
B EB k (2.2.40) 其中k 是 CST 元素的剛度矩陣,而m K 的表示式詳見附錄 B。 m 2.2.3.2 DKT 元素的節點內力及剛度矩陣 將(2.2.16)式、(2.2.29)式代入(2.2.31)式可得 σ =b zEBub (2.2.41) 假設在薄殼中剪應力τxz與τxz所做的虛功可以忽略,所以本文中用虛 功原理推導 DKT 元素的節點內力時僅考慮σx、σy及τxy所做的虛功。 由虛功原理可得 dV V b t b b t bf =∫
ε σ u δ δ (2.2.42)f =b {fb1 fb2 fb3} fbi ={fzj mxj myj} j =1,2,3 (2.2.43) 其中f 是 DKT 元素對應於b δub的節點內力,u 定義於(2.2.28)式,V 為b DKT 元素的體積。 將(2.2.16)式、(2.2.41)式代入(2.2.42)式可得 =
∫∫
A b b t b t b b t bf u zB zEB u dzdA u δ δ =∫
A b b b t b t b B D B u dA u δ (2.2.44) 其中 − − = =∫
− 2 1 0 0 0 1 0 1 ) 1 ( 12 2 3 2 2 2 ν ν ν ν Eh dz z h h b E D (2.2.45) 其中 h 為元素厚度。 由(2.4.45)式可得[12] f =b kbub (2.2.46) η ξ η d d A tb b b b∫ ∫
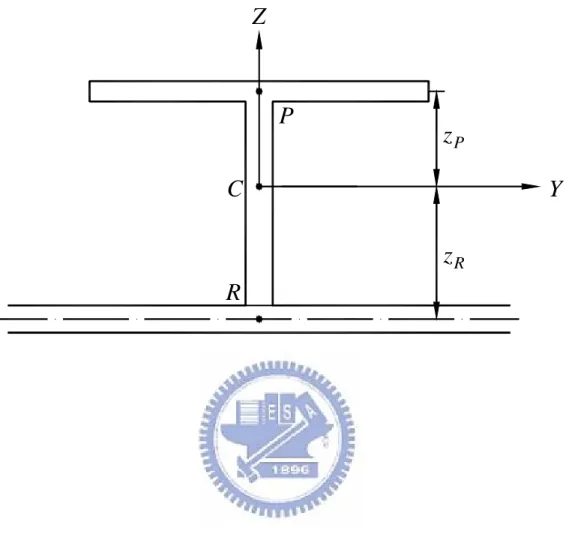
− = 1 0 1 0 2 B D B k (2.2.47) 其中k 是 DKT 元素剛度矩陣。 b 2.3 梁元素 本文採用文獻[16]中提出之開口薄壁梁元素的線性部份並加以必 要的修改。因本研究將板的加勁條視為梁,所以梁元素的節點與殼元 素的節點位置與自由度需一致(如圖 2.4),即位於殼的中心面且有三個 平移及旋轉自由度。因文獻[16]的元素節點取在梁斷面的剪心且有七 個自由度,即三個平移、三個旋轉及扭轉率,所以文獻[16]之梁元素 的線性剛度矩陣不能直接用在本研究上。本章中將推導元素節點位置改變時,對應於新舊節點之元素剛度矩陣間的轉換關係,並將文獻[16] 之元素節點的扭轉率自由度去掉。本章中亦將簡單描述經本文修改後 文獻[16]的梁元素。 2.3.1 梁元素的基本假設 本文中對梁的基本假設如下: (1) 梁為等斷面且細長桿件。 (2) Euler-Bernoulli 假說成立。 (3) 梁斷面變形前後,斷面形狀不變且斷面內的應變可略。 (4) 梁應變均為小應變 2.3.2 梁元素之變形描述 本文是在元素座標上,描述梁元素的變形,如圖 2.5 所示本文之 元素座標的示意圖,其中x1E軸通過元素的兩端點斷面的剪心。圖中 P 、C 、 R 分別為梁斷面的剪心、形心及一任意的固定點。x2s及x3s為 斷面座標,其原點為斷面形心,方向通過形心的主軸方向。元素座標 的 E x2 及x3E軸分別與x2s及x3s軸平行。由 2.3.1 節的基本假設可知,梁 元素的變形可由其剪心軸的單位長度伸長量、側向位移及其截面繞剪 心軸的旋轉決定。本文中假設梁元素剪心軸的側向位移與文獻[16]相 同,為三次 Hermitian 多項式,形心軸的軸向變形與文獻[16]相同, 即不計扭轉時,形心軸的應變為均勻的應變,繞剪心軸的旋轉為一次 多項式與文獻[16]的三次 Hermitian 多項式不同。 2.3.3 梁元素節點位移向量與剛度矩陣
梁元素的節點 j( =j 1,2)若取在其兩端斷面的剪心 P、形心C 或任 意點 R 時,則節點 j 的節點參數可以表示為uSj,vSj,wSj,(S =P,C,R), ij φ ( =i 1,2,3),其中uSj,vSj,wSj為 S 點在x1E,x2E,x3E軸方向的位移分量, ) 3 , 2 , 1 ( =i ij φ 為在節點 j 之斷面繞x 軸的旋轉。梁元素的節點參數可表iE 示成 } { Sa Sb Sc Sd S u u u u q = (2.3.1) 其中 } { S1 S2 Sa = u u u , } { S1 31 S2 32 Sb = v φ v φ u , } { S1 21 S2 22 Sc = w φ w φ u , } { 11 12 Sd = φ φ u 若取剪心 P 為節點,則利用文獻[16]的推導方式,可求得對應於q 的P 線性剛度矩陣如下: = P dd P cc P cb P ca P bc P bb P ba P ac P ab P aa P k 0 0 0 0 k k k 0 k k k 0 k k k k (2.3.2) 其中 P aa k = − − 1 1 1 1 L EA , t a P t P ba P ab k AEy G B k =( ) = t a P t P ca P ac k AEz G C k =( ) =
t P P t P cb P bc y z L AE BC k k =( ) = t P bb P bb L AEy BB k k 2 + = t P cc P cc L AEz CC k k 2 + = − − = 1 1 1 1 L GJ P dd k } 1 1 { 1 − = L a G } 1 0 1 0 { − = B } 1 0 1 0 { − = C − − − − − − = 2 2 2 2 3 4 6 2 6 6 12 6 12 2 6 4L 6 6 12 6 12 L L L L L L L L L L L L EIz bb k − − − − − − = 2 2 2 2 3 4 6 2 6 6 12 6 12 2 6 4 6 6 12 6 12 L L L L L L L L L L L L L EIy cc k 其中y 、P z 為 P 點在元素斷面座標(見圖 2.5)的座標值。因為剪心與P 形心不重合,所以側向位移與軸向位移有耦合作用,故k ,Pab k ,Pac kPbc 不為零。 因本文假設梁斷面不會變形,所以節點 j( =j 1,2)之斷面剪心 P 受 到一擾動位移δUPj ={δuPj δvPj δwPj}及擾動旋轉δφφφφj = } {δφ1j δφ2j δφ3j 時,同一斷面上任意點 R 對應的擾動位移可表示 為:
PR j Pj Rj U r U =δ +δφφφφ × δ (j = 1, 2) (2.3.3) } 0 { } 0 { R P R P PR PR PR = y − y z − z = y z r (2.3.4) 其中×表向量外積,y 、R z 為 R 點在元素斷面座標R (見圖 2.5)的座標值。 由(2.3.3)式可知(2.3.1)式中q 與P q 之擾動量R δqP與δqR有以下關 係: R PR P T q q δ δ = (2.3.5)
[ ]
= = 2 4 4 2 I 0 0 0 T I 0 0 T 0 I 0 0 T T I T T cd bd ac ab ij PR (2.3.6) = PR PR ab y y 0 0 0 0 0 0 T , − − = PR PR ac z z 0 0 0 0 0 0 T = 0 0 0 0 0 0 PR PR bd z z T , − − = 0 0 0 0 0 0 PR PR cd y y T 由(2.3.5)式與反梯度法則(Controgradient law)[18],可得 P t PR R T f f = (2.3.7) 其中 fR ={fRa fRb fRc fRd} } { Pa Pb Pc Pd P f f f f f = } { 11S 12S Sa = f f f } { 21S 31s 22S 32S Sb = f m f m f} { 31S 21S 32S 22S Sc = f m f m f } { 11S 12S Sd = m m f 其中S =P,R,f 、R f 分別為對應於P δqR、δqP的節點內力, S ij f ) 3 , 2 , 1 ( =i 、( =j 1,2)表示斷面 j 上 S 點在x 方向的力,iE m 表示斷面ijS j 上 S 點在 E i x 方向的力矩。 對應於q 的線性剛度矩陣可表示為 R R R R q f k ∂ ∂ = (2.3.8) 將(2.3.7)式代入(2.3.8)式並使用 chain rule 可得 PR P PR R P P P t PR R R R T k T q q q f T q f k = t ∂ ∂ ∂ ∂ = ∂ ∂ = (2.3.9) 其中k 定義於(2.3.2)式 P 將(2.3.2)式,(2.3.6)式代入(2.3.9)式可得 = R dd R dc R db R da R cd R cc R cb R ca R bd R bc R bb R ba R ad R ac R ab R aa R k k k k k k k k k k k k k k k k k (2.3.10) R aa k = − − 1 1 1 1 L AE , − − = = 1 0 1 0 1 0 1 0 ) ( L AEyR t R ba R ab k k − − = = 1 0 1 0 1 0 1 0 ) ( L AEzR t R ca R ac k k 0 ) ( = = baR t R ab k k
− − + = 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 2 L AEyR bb R bb k k − − = = 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 ) ( L z AEyR R t R cb R bc k k − − + = 1 0 1 0 0 0 0 0 1 0 1 0 0 0 0 0 2 L AEzR cc R cc k k t R db R bd (k ) k = = − − − − L L L L L z EIz PR 6 6 12 12 6 6 12 12 3 t R dc R cd (k ) k = = − − − − L L L L L y EIy PR 6 6 12 12 6 6 12 12 3 + − − = 1 1 1 1 L GJ R dd k + − − 12 12 12 12 3 2 L y EIy PR − − 12 12 12 12 3 2 L z EIz PR 其中yPR = yR − yP,zPR =zR −zP 2.4 彈性支承的平移彈簧常數及彈簧元素 本文所考慮的結構為加勁板壓於 O 型環上,本文中視 O 型環為 板結構的彈性支承,為簡化推導,本文將單位長度的 O 型環結構簡 化如圖 2.6 所示,本文假設 O 型環僅承受如圖 2.6 所示的均佈軸向力,
且其應力僅有與軸力方向一致的正應力,若 O 型環的材料為橡膠, 其楊式係數為E ,則彈性支承每單位長度的彈簧常數可表示為: R OR OR R h t E ⋅ = R K (2.4.1) 其中hOR為彈性支承的高,tOR為彈性支承的寬度。 圖 2.7 所示為本文中採用的彈簧元素,其節點內力剛度矩陣可表 示成 f =S kSuS (2.4.2) fS ={fS1 fS2} (2.4.3) − − = 1 1 1 1 R R S K L k (2.4.4) 其中K 定義於(2.4.1)式,R L 為分配給彈簧元素之 O 型環的長度,R R RL K 稱為彈簧元素的剛度。 2.5 系統平衡方程式 在系統固定總體座標中定義的線性平衡方程式,可表示為 P KU = (2.5.1) 其中 K 為系統剛度矩陣,U 為系統節點位移向量,P 表示系統節點外 力向量。K 可由各元素之元素剛度矩陣,從元素座標轉換到固定總體 座標上組合而成。P 由各元素的節點外力組合而成,本文中僅考慮均 佈載重,所以元素中各節點所受的外力是由三分之一的板元素面積乘 上均佈負荷而得。 本文中僅考慮板受均佈壓力的情況,因 O 型環僅能承受壓力, 不能承受拉力,且為了保持板與 O 型環間氣密性,O 型環須有適當
的壓縮量。本文中將調整 O 型環在不同位置的剛度使其在預設負荷 下的壓縮量是均勻的且為一預設值,這是一個最佳化的問題,本文將 在下節中說明。 2.6 彈簧元素剛度的最佳化及目標函數 令 M 表示將 O 型環離散化後彈簧元素之數目,ki(i =1−M)表示 彈簧元素i 的剛度。令k 為彈簧元素之剛度組成之M ×1的行矩陣,並 可表示為 } ,..., , {k1 k2 kM = k (2.6.1) 若將彈簧元素的剛度視為變數,則(2.5.1)式中系統的剛度K 與節點位 移 U 都是k 的函數。 令Q 為一M ×1的行矩陣,並可表示為 Q={Q1,Q2,...,QM} (2.6.2) 其中,Qi(i=1,...,M)表示第i 個彈簧元素與板元素之共同節點在 Z 方 向的位移,為方便稱呼,本文中稱Q 為第 i 個彈簧元素的位移。因 Qi 可以從(2.5.1)的解 U 中選取而得,所以Q 亦為k 的函數。 本文中希望調整(2.6.1)式的k ,而使(2.6.2)式中所有的Q 趨近一i 預設值。該目標可將下列目標函數極小化而達成 ) ( ) ( 2 1 ) (k Q Qe Q Qe H = − t ⋅ − (2.6.3) 且 ki ≥kmin> 0 (2.6.4) 其中Q 為一預設彈簧位移,kmin為一預設之最小彈簧剛度,e 為一
1 × M 的行矩陣並可表示為 e={1,1 ,,1 ...., }1 (2.6.5) 因(2.6.3)式中 H 為 k 的函數,所以當 H 有最小值時,必須滿足 0 k = ∂ ∂ = H ϕ ϕ ϕ ϕ (2.6.6) 其中 ϕϕϕ 為一ϕ M ×1的行向量可視為誤差向量,其第i 個元素 i i k H ∂ ∂ = ϕ 。 將(2.6.3)式代入(2.6.6)式可得 0 e Q G − = = ={ϕi} ( Q ) ϕ ϕϕ ϕ (2.6.7) G =[Q,1,Q,2,...,Q,M]t (2.6.8) ϕi =Q,ti(Q−Qe) (2.6.9) 其中G 為一M ×M的矩陣, , (i 1,..,M) ki i = ∂ ∂ = Q Q ,本文中
( )
( )
i i k ∂ ∂ = , (i=1,..,M)。 因Q 可以從 U 中選取而得,所以Q 亦可從,i U 中選取而得。,i U 可,i 由以下的推導求得。 令對應於第i 個彈簧位移的系統自由度為系統之第 I 個自由度。 將(2.6.1)式對k 微分可得 i KU,i=−UI (2.6.10) UI =K,iU (2.6.11) 因K 中除了第 I 個對角線元素的值為 1 外,其餘的元素皆為 0,,i 所以(2.6.9)式中,行向量U 中除了第 I 個元素的值為I U 外,其餘皆為I0,其中U 為 U 中的第 I 個元素,即系統中第 I 個自由度的位移。解I 線性聯立方程式(2.6.9)即可求得U 。 ,i (2.6.7)式為 k 的非線性函數,本文中將在第三章以牛頓法求滿足 (2.6.7)式的 k ,並以 tol e ≤ ϕ ϕϕ ϕ (2.6.12)
作為收斂準則,其中
( )
表示( )
的 Euclidean norm,etol為一預設的容許誤差。 用牛頓法解(2.6.7)式時,在迭代過程中需用到 k S ∂ ∂ = ϕϕ ,故在此先ϕϕ 推導S 如下: 將(2.6.7)式之 ϕϕϕϕ 對 k 微分可得 ] [ ] [ j i ij k S ∂ ∂ = = ϕ S ) ( , , , Q Q Q e Q Q k S ti j tij j i ij = + − ∂ ∂ = ϕ (2.6.13) 其中S 為一M ×M的矩陣。 (2.6.13)式中Q,ij可由U,ij選取而得。U,ij可以由以下推導求得 將(2.6.10)式對k 微分可得 j ) ( , , , , ,ij K iU j K jU i KU =− + (2.6.14) 其中U 及,i U 可由(2.6.10)式求得,,j K,iU,j及K,jU,i的計算方法與 (2.6.11)式算U 的方法一樣。 I 由(2.6.14)式可知U,ij =U,ji,所以(2.6.13)式中Q,ij =Q,ji,即
第三章 數值計算方法與程序 本文解(2.6.7)式的數值計算方法是基於牛頓-拉福森(Newton -Raohson)法的迭代法。本文採用的數值程序可說明如下: 1. 設定預期的彈簧元素位移 Q ((2.6.3)式)及彈簧元素最小的剛度 min k ((2.6.4)式)。 2. 設彈簧元素的剛度之初值k 0 3. 令k =k0 4. 解(2.6.1)式求得 U ,解(2.6.10)式,求得U,i(i=1−M),解(2.6.14) 式,求得U,ij(i=1−M, j =1−M)。 5. 由 U ,U ,,i U,ij中選取Q ,Q ,,i Q 。 ,ij 6. 由(2.6.7)式計算ϕϕ =ϕϕ ϕϕϕϕ(k),檢查 ϕϕϕϕ 是否滿足(2.6.12)式的收斂準則, 若滿足,則 0 k k = 為最佳的彈簧元素剛度,並停止迭代。若 ϕϕϕϕ 不 滿足(2.6.12)式的收斂準則,則進行下一步。 7. 用牛頓法求一改正量δk=−S−1ϕϕϕϕ,其中S 在(2.6.13)式中定義。 8. 令k0 =k +αδk,其中α為一常數,本文中取 0<α≤1且使ki0 ≥kmin ) 1 (i= −M 中最大的α ,將ki0 =kmin的彈簧元素的剛度固定,在以 後的迭代中不再改變。 9. 回到 3 由本研究的數值經驗發現,如果彈簧元素的初值選擇不當,上述 迭代過程將無法收斂。本文除特別聲明外,都用以下的方法決定彈簧 元素的初始剛度
Q M pA C ki0 = ,i= 1−M 0<C <1 (3.1) 其中 p 為均佈壓力的大小, A 為板結構的面積,C 為一常數,M 為彈 簧元素的數目,Q 為彈簧元素的預設位移。本文將在第四章中討論 0 i k 對迭代收斂的影響。
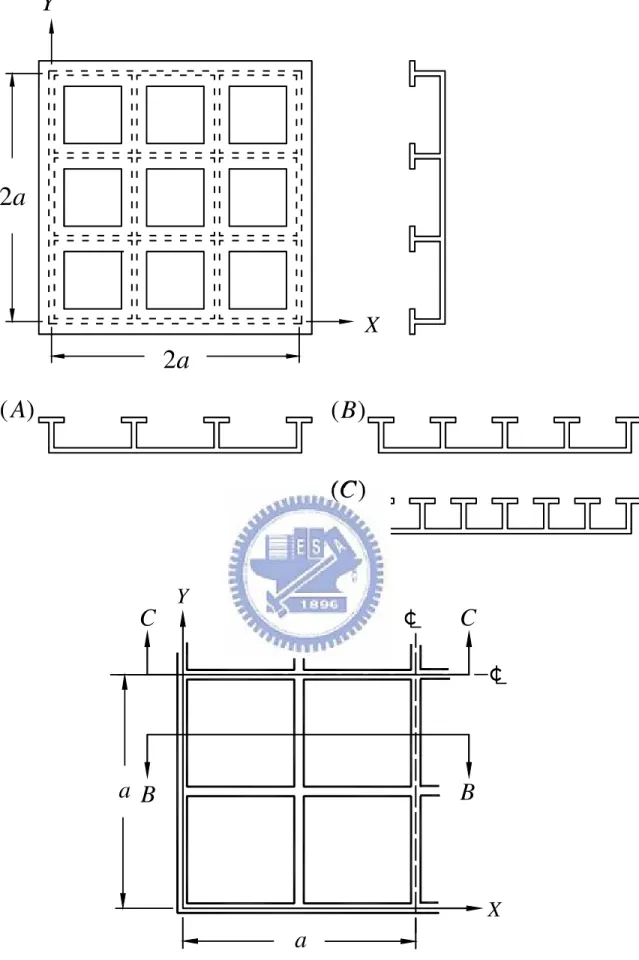
第四章 數值例題與結果 本研究用加勁板及彈性支承來模擬真空腔體的容器蓋及 O 型環 (密合器),所以加勁板承受的外力為一大氣壓的均佈壓力,即 1013 . 0 = q N mm2。為了避免空氣進入真空腔體,O 型環必須有一定 的壓縮量,本研究將藉改變 O 型環剛度的大小及分佈,使其有一均 勻的壓縮量,因 O 型環尺寸甚小,故本章例題將該均勻壓縮量定為 1.25 mm ,即Q=−1.25mm(見(2.6.3)式)。為了方便分析,本研究不設 定加勁板的最大允許變形位移,僅分析在不同板厚及加勁條時加勁板 的變形。 本章例題中僅考慮如圖 4.1 所示邊長為2 =a 2.4m之正方形加勁 板,加勁板在水平及垂直方向有相同斷面及相同數目的肋,板的四周 都有肋且肋的間距都相同。令n 表示水平r (垂直)方向的肋數,如圖 4.1 所示,本章例題考慮了(A) nr =4, (B) nr =5, (C) nr =7三種情況。 本章例題的肋採用WT 型鋼,且考慮了三種不同的尺寸:WT4 ×7.5, 6 5 × WT , WT6 ×7,以上三種型鋼的斷面尺寸及斷面常數皆列於附錄 C 中。本章的例題考慮了三種不同的板厚:tp(mm)=6, 108, ,本章假 設板與肋的材料均為鋼,其楊式係數 2 200kN mm E = ,Poisson’s ratio 3 . 0 = ν ,比重γ =7.7×104N m3。 表一為不同加勁板的自重,由表一中可以發現加勁板重Wp+r與 氣壓的合力Wa =q×(2a)2 =5.83488×105N的比值,最大僅為 0.0136,所以在本章的例題中,我們皆將Wp+r忽略不計。 加勁板之邊界條件為四邊受彈性支承拘束;由於在本章中所考慮 的板結構皆為正方形,所以本文所有例題除特別聲明外皆取四分之一 板來分析。
4.1 收斂性與準確性分析 為了解本文所採用之三角殼元素的收斂性及準確性,本節中首先 用不同的元素網格分析了邊長 =l 2400mm、厚度 =t 30 mm,四邊為簡 支承的正方形薄板,其所受外力為一大氣壓的均佈側向力。本例題分 析時,將四分之一板分割成 8×8、12×12、24×24 的網格。四邊為簡支 承的正方形薄板受均佈壓力 q 時,其中心點的側向位移的解析解[1] 為 D ql w 4 max
α
= , ) 1 ( 12 2 3 ν − = Et D ,α
=0.00406,將本例題的材料常數 及尺寸代入可得wmax =27.5937mm。本文中用 8×8, 12×12 及 24×24 之 網格得到的結果分別為 27.6186 mm 、27.6145 mm 及 27.6118 mm ,由 以上可知 8×8 個網格的結果已足夠準確。但為了方便安排不同數目的 肋,在本文中以後板的例題除另有聲明外皆使用 12×12 的網格來分 析。由本例題亦可發現若欲減少板的撓度及重量,須使用加勁板並減 少板的厚度。 為了解本研究中用梁元素與殼元素分析加勁板的可行性及準確 性,本節中分析了以下的兩個例題。 第一個例題考慮如圖 4.2 所示之懸臂梁受一端點負荷p=1N,本 例題分析時將懸臂梁的 T 型部份離散為 10 個梁元素,底部的梁翼離 散為 40 個三角殼元素(2 ×10之網格)。由材料力學可得自由端之節點 A 的垂直及水平位移為 mm EI pL VA 5 3 10 17147 . 0 3 − × = = mm y EI pL dx EI y x L p dx UA x L A A 6 2 0 0.15432 10 ) ( − × = = − = =∫
ε∫
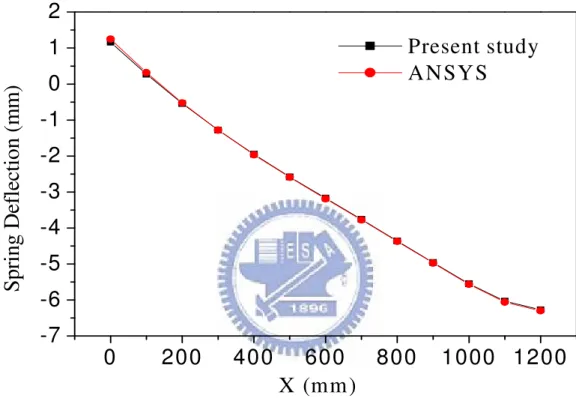
上式中yA =6mm為斷面形心到 A 點的距離,I =1620mm4。本文分析 結果為V 0.17159 10−5mm × = , U =0.15363×10−6mm,本文的結果與材料力學的理論解十分接近。 第二個例題考慮如圖 4.3 所示之四邊受彈性支承拘束的加勁板, 受一大氣壓均佈側向載重,彈性支承的彈簧常數k=0 ×.2 104N mm。 本例題亦利用 ANSYS[20]分析以驗證本文結果的正確性;用 ANSYS 分析時,以其元素 shell 63(見附錄 D)模擬加勁板的板與肋,用元素 combin 14 模擬彈性支承。為方便於與本文的的結果比較,ANSYS 與 本研究分析時用相同的網格。由圖 4.4 與 4.5 可發現兩者的結果幾乎 重合,由上述兩例題可說明本文的方法及數值程序之正確性。由圖 4.4 可發現加勁板最大的變形約有十公分,這應是肋的數目及剛度不 足所造成的。 4.2 彈性支承之剛度的最小值及初始值對其最佳化結果的影響 為了方便以後的探討及說明,本章中令 ,ki (kini)i,(kopt)i ) 1 (i= −M 分別代表第i 個彈性支承的剛度、初始剛度、最佳化的剛
度。 ,di (dini)i,(dopt)i (i=1−M)分別代表第i 個彈性支承的位移、初 始位移及最佳化的位移。 由(2.6.3)式及(2.6.6)式可知,當di =Q (i=1−M)時, Q 為(2.6.3) 式中彈性支承的預期位移,對應的k 即為i (kopt)i且應有唯一解,但k 的i 值有些可能是負的。因彈性支承的剛度需大於 0,所以本研究在(2.6.4) 式中,令ki ≥kmin>0 。本研究在第三章中提到在最佳化的迭代過程 中,當ki =kmin時,即將k 的值固定為i kmin,且不參加以後的迭代,
所以(kini)i及kmin都會影響最佳化的結果,即(kopt)i不會有唯一解,
且(dopt)i不會剛好等於Q。本節中將探討不同的kmin及(kini)i對(kopt)i 及(dopt)i的影響。
表二及表三為kmin對(kopt)i及(dopt)i的影響,圖 4.6 及圖 4.7 是由 表二與表三的結果繪製之kopt的分佈圖,由表二及表三中可發現,當 −∞ = min k ,即k 的值沒有限制時,不同的i (kini)i都收斂到相同的(kopt)i 且(dopt)i =Q,如本節中先前所預期,有些k 的值小於 0。但當i kmin>0
時,亦如本節中先前所預期,不同的kmin,有不同的(kopt)i和(dopt)i,
且(dopt)i不等於Q,但當kmin ≤10N mm時,(kopt)i及(dopt)i的值變化
很少,所以在本章以後的例題,除非另有說明,都令kmin =10N mm。
由表二與表三或圖 4.6 與圖 4.7 中可發現,當(kini)i不同時,對應
於相同kmin的(kopt)i有相當的差異,但(dopt)i則差異甚小且都很接近
Q 。本文採用牛頓法求(kopt)i,因迭代收斂與否和(kini)i有很大的關
係,所以本節中將進一步探討(kini)i對(kopt)i的影響。
表二到表九為不同的kini對kopt及dopt的影響,為了方便說明,本
文中以kini −Ui(i=1 −4)表示四種不同均勻分佈的kini,kini − Ni (i=1,2)表示兩種不均勻分佈的k 。ini kini −Ui及kini −Ni的值詳列在表 四到表九中。
由表四,五,七,八及本研究的數值經驗發現,對應於均勻的kini之
ini
d 在xa=0有最大值,在xa=1有最小值,若kini −Ui的值太大,如
表四、表七之kini −U1,則在xa=0的dini的值是正的,此時kini −U1無
法收斂,當kini −Ui的值減小到某一程度,如表四,五,七,八中的
2
U
kini − ,kini −U4,則不同的kini −Ui會收斂到不同的kopt,但dopt都
很接近Q 。本研究的數值經驗亦發現將 =1 a x 附近的 ini k 加大,可使 在 =0 a x 附近的 ini d 減小,且使dini的分佈變的較均勻,如表六與表九
中之kini −Ni(i=1,2 )及對應的d 。本研究的數值經驗發現當ini dini 較
均勻時,對應的kini都會收斂到一個對應的kopt。由表六和表九可發
現不同的kini −Ni(i=1, 2 )會收斂到不同的kopt,但(dopt)i則與Q 都很 接近。
由表二到表九的結果及本節的討論可知不同的kini對應不同的
opt
k ,所以本研究的彈性支承的剛度應有無窮個最佳化的結果。表四
到表九為本章在 4.3 節考慮的例題中,加勁板剛度最大與最小的兩種 情形。由表四到表九可以發現kini −U2, kini −U4,kini − N1,kini −N2,
都可收斂到kopt,所以以上四種kini亦應可作為 4.3 節之所有例題的 ini k 。 4.3 不同加勁板的撓度及其最佳化的彈性支承剛度 本節中將分析本章中先前提到的各種加勁板,即分析板厚tp =6, , 8 10 mm ,肋數nr =4,5 7 ,肋斷面為, WT4 ×7.5,WT5 ×6,WT6 ×7的 加勁板。本節中將比較不同加勁板的撓度及其最佳化的彈性支承剛 度。本節中初始彈性剛度支承剛度僅考慮kini − N1及kini −U2兩種。 最小彈性支承剛度僅考慮kmin =10N mm。本研究所分析的加勁板之 最大側向位移都發生在其對稱軸或對稱軸附近的斷面上,所以本節中 僅探討加勁板之對稱軸(見圖 4-1 之斷面 C)的側向位移d 及圖 4-1 之C 斷面 B 的側向位移d 。斷面B B 與斷面 C 距離為相鄰兩肋之距離的一 半。本節中將d 及B d 的最大值視為加勁板的最大側位移。 C 表十到表十八及圖 4.10 到圖 4.15 為初始彈性支承剛度為kini − N1 的分析結果,表十九到表二十七及圖 4.16 到圖 4.21 為初始彈性支承 剛度為kini −U2的分析結果。
![圖 2.2 所示為文獻[12]中所提出的 DKT 板元素,節點 1、2、3 是 三角形的三個頂點,節點 4、5、6 為三角形三個邊的中點,這三個中 點的自由度僅在元素推導的過程中暫時使用,在最後不會出現在元素 的節點自由度。在圖 2.3 中,n 為殼元素中心面變形前的單位法線向 量,n′ 為n 在元素變形後的新位置,圖 2.3 中θ 為一在 x 1 E − x 2 E 平面上 的旋轉向量[17],將θ 作用在n 可將n 轉到n′ 。由 2.2.1 的假設(3)可知 垂直於變形前的元素中心面法線向量變形後仍為](https://thumb-ap.123doks.com/thumbv2/9libinfo/8260554.172135/21.918.155.772.301.1112/為文獻三角形不會出現在元節點自由度在為殼中心為一在可將轉到.webp)