行政院國家科學委員會專題研究計畫 成果報告
受側向負荷之挫屈梁的靜態及動態行為研究
研究成果報告(精簡版)
計 畫 類 別 : 個別型 計 畫 編 號 : NSC 100-2221-E-009-098- 執 行 期 間 : 100 年 08 月 01 日至 101 年 07 月 31 日 執 行 單 位 : 國立交通大學機械工程學系(所) 計 畫 主 持 人 : 蕭國模 計畫參與人員: 碩士班研究生-兼任助理人員:許彤羽 博士班研究生-兼任助理人員:黃楚璋 報 告 附 件 : 出席國際會議研究心得報告及發表論文 公 開 資 訊 : 本計畫可公開查詢中 華 民 國 101 年 11 月 04 日
中 文 摘 要 : 本文中所謂的挫屈梁為將一細長直梁兩端固接在基座上,將 一基座沿軸向壓縮,使該梁因側向挫屈,而朝側向拱起,然 後再將端點基座固定。本研究的目的在探討挫屈梁的初始變 形與自然振動,及不同拱起高度之挫屈梁的受側力的非線性 行為。本研究以共旋轉有限元素法及非線性梁理論的一致性 二階線性化推導挫屈梁的平衡方程式及運動方程式。將挫屈 梁的運動方程式用泰勒級數在挫屈梁的初始變形位置展開, 取到一次項,即為線性振動的運動方程式。 本文使用基於弧長法和牛頓-拉福森法的增量迭代法解非線性 平衡方式,探討不同細長比之挫屈梁在不同端點壓縮位移的 初始變形,同時以子空間迭代法求得挫屈梁的自然振動頻率 與其對應的振動模態,本文使用在平衡方程式中增加臨界條 件的延伸系統來追蹤在不同軸向壓縮的挫屈梁受到側向負荷 之臨界點的摺線。 本研究以數值例題探討不同細長比之挫屈梁在不同壓縮位 移之拱起高度。本研究亦以數值例題探討不同細長比、不同 拱起高度之挫屈梁的自然頻率及振態的變化、不同拱起高度 之挫屈梁的受側力的非線性行為。 中文關鍵詞: 挫屈梁,幾何非線性,共旋轉有限元素法,褶線,振動,自 然頻率
英 文 摘 要 : Buckled Beam, Geometrical Nonlinearity, Co-rotational Finite Element Formulation, Fold line, Vibration, Natural frequency
英文關鍵詞: Buckled Beam, Geometrical Nonlinearity, Co-rotational Finite Element Formulation, Fold line, Vibration, Natural frequency
□期中進度報告
行政院國家科學委員會補助專題研究計畫
期末報告
受側向負荷之挫屈梁的靜態及動態行為研究
計畫類別:□個別型計畫 □整合型計畫
計畫編號:NSC 100-2221-E-009-098
執行期間:100 年 08 月 01 日至 101 年 07 月 31 日
執行機構及系所:交通大學機械所
計畫主持人:蕭國模 博士
共同主持人:
計畫參與人員:黃楚璋、許彤羽
本計畫除繳交成果報告外,另含下列出國報告,共 ___ 份:
□移地研究心得報告
□出席國際學術會議心得報告
□國際合作研究計畫國外研究報告
處理方式:除列管計畫及下列情形者外,得立即公開查詢
□涉及專利或其他智慧財產權,□一年□二年後可公開查詢
中 華 民 國 101 年 10 月 27 日
I 摘要 本文中所謂的挫屈梁為將一細長直梁兩端固接在基座上,將一基座沿軸向壓縮, 使該梁因側向挫屈,而朝側向拱起,然後再將端點基座固定。本研究的目的在探討挫屈 梁的初始變形與自然振動,及不同拱起高度之挫屈梁的受側力的非線性行為。本研究以 共旋轉有限元素法及非線性梁理論的一致性二階線性化推導挫屈梁的平衡方程式及運 動方程式。將挫屈梁的運動方程式用泰勒級數在挫屈梁的初始變形位置展開,取到一次 項,即為線性振動的運動方程式。 本文使用基於弧長法和牛頓-拉福森法的增量迭代法解非線性平衡方式,探討不同細長 比之挫屈梁在不同端點壓縮位移的初始變形,同時以子空間迭代法求得挫屈梁的自然振 動頻率與其對應的振動模態,本文使用在平衡方程式中增加臨界條件的延伸系統來追蹤 在不同軸向壓縮的挫屈梁受到側向負荷之臨界點的摺線。 本研究以數值例題探討不同細長比之挫屈梁在不同壓縮位移之拱起高度。本研究亦以 數值例題探討不同細長比、不同拱起高度之挫屈梁的自然頻率及振態的變化、不同拱起 高度之挫屈梁的受側力的非線性行為。 關鍵詞:挫屈梁,幾何非線性,共旋轉有限元素法,褶線,振動,自然頻率 Abstract.
The buckled beam considered here is a beam originally straight and then compressed axially beyond the critical buckling axial displacement. The objective of this study is to investigate the deformed configuration and free vibration around the deformed configuration of the buckled beams, and the nonlinear behavior of the buckled beam subjected to lateral load. The corotational finite element formulation is used here. The principle of virtual work, d'Alembert principle and the consistent second order linearization of the nonlinear beam theory are used to derive the element equations in current element coordinates. The governing equations for linear vibration are obtained by the first order Taylor series expansion of the equation of motion at the static equilibrium position of the buckled beam.
The critical points in the lateral loading – deflection curve are calculated in an extended system obtained by augmenting equilibrium equations with a criticality condition which forces the Newton-Raphson iterations to converge to the critical point. The fold lines of the critical loading parameters corresponding to different axial displacement are traced.
Numerical examples are studied to investigate the initial configuration and natural frequencies of clamped buckled beams with different slenderness ratios under different axial compression. The nonlinear behaviors of the buckled beam subjected to lateral load are also investigated.
Keywords: Buckled Beam, Geometrical Nonlinearity, Co-rotational Finite Element
目 錄
中文摘要... I 英文摘要... I 目錄... II 圖目錄... III 第一章 導論... 1 第二章 理論推導... 2 2.1 基本假設 ... 2 2.2 座標系統描述 ... 3 2.3 梁元素的變形描述 ... 3 2.4 梁元素的節點內力 ... 4 2.5 元素的剛度矩陣 ... 5 2.6 元素的質量矩陣 ... 6 2.7 系統平衡方程式 ... 6 第三章 挫屈梁的初始變形及自由振動分析... 7 3.1 挫屈梁的初始變形 ... 7 3.2 挫屈梁的自然振動頻率及振態 ... 8 第四章 挫屈梁受側向負荷之幾何非線性分析... 9 第五章 結論... 10 參考文獻... 11 附圖... 13III
圖 目 錄
圖 1 直梁一端受軸向壓縮及側向挫屈示意圖... 19 圖 2 挫屈梁受側向集中力 P 的位移-負荷曲線圖 ... 20 圖 3 元素座標系統及總體座標系統關係圖... 21 圖 4 梁的變形圖... 21 圖 5 挫屈梁的
h
曲線... 23 圖 6 挫屈梁的無因次端點軸向反力P /
P
CR-中點側向位移
/
L
T曲 線... 24 圖 7 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
4T)
12-無因次側向位 移
/
h
的曲線(
/
h
3
,i =1,2)... 25 圖 8 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
4T)
12-無因次側向位 移
/
h
的曲線(
/
h
8
,i =1,7)... 26 圖 9 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
4T)
12-無因次側向位 移
/
L
T的曲線(
/
L
T
0
.
3
,i =1,6)... 27 圖 10 挫屈梁結構中點 C 受側向集中力 P 或集中力矩 M 的結構圖 ... 28 圖 11 挫屈梁受側向集中力 P 的h
v
EI
PL
T2
C 曲線圖(
1
.
7
,
2
.
2
,
3
) ... 29 圖 12 不同細長比
挫屈梁臨界點在
h
C 平面的摺線圖(
80
) ... 30 圖 13 不同細長比
挫屈梁臨界點在
EI
PL
T2 平面的摺線圖(
80
) ... 31 圖 14 不同細長比
挫屈梁臨界點在
h
C 平面的摺線圖 (
3
10
4)... 32 圖 15 不同細長比
挫屈梁臨界點在
EI
PL
T2 平面的摺線圖 (
3
10
4)... 33第一章 導論 本研究中挫屈梁,指的是如圖1 所示之細長直梁受到端點軸向位移 時,若壓縮量 達到挫屈臨界值時,梁會發生側向挫屈,如繼續施加軸向壓縮,則該梁會如圖1(b)所. 示以第一挫屈模態朝垂直於軸方向的側方向拱起[21,22,26,29],其大小可以用梁中點的 側向位移 表示, 的大小與 有非線性的關係,通常很小的 ,即可使此挫屈梁有很 大的側向位移 及旋轉[26]。 如圖 1(b)所示之挫屈梁在將其軸向兩端固定(clamped-clamped)後,再施加側 向的負荷,這時梁的行為表現與曲梁類似,文獻上有很多關於曲梁的分析,其平衡路徑 會受到側向拱起高度 的影響,當 較小時,其位移-負荷曲線存在如圖 2 所示之極限 點(limit point)(點La
1,La2)[28],有跳躍挫屈(snap through buckling)的現象,且在同
一負荷下存在兩個穩定的平衡位置(bistable)[26],當側向拱起高度 較大時,其位移 -負荷曲線存在如圖2 所示之極限點(點Lb 1, b L2)及分歧點(bifurcation point)(點B1b,B2b) [28],若分歧點先出現,則先有分歧挫屈(bifurcation buckling)的現象。如圖 2 所示, 在梁結構發生跳躍行為後(不論是分歧點先出現或是極限點先發生),其位移-負荷曲 線在側向力為零時存在雙穩態,即梁結構存在兩個穩定平衡位置(點S1,S2a及點S1,S2b), 這種機械特性很廣泛的被運用。 文獻上有不少挫屈梁相關的研究[3-5,8,12-14,20-27,29]。文獻[29]中,Tseng 等人以 假設模態法,假設其側向振動位移為前兩個挫屈模態的組合,分析挫屈梁受大幅度基礎 振動的非線性振動,並且用實驗驗證其分析結果,所使用的梁如圖1,尺寸為LT 18in, in h0.021 ,b0.5in,不過文獻[29]中僅分析拱起高度很小( /h1.5)的範圍,而 且只有探討第一模態的振動。 文獻[23]中以 Runge-Kutta(RK-4)的數值積分法解非線性運動方程式,來分析挫 屈梁受到正弦均佈力的非線性動態反應,[23]考慮的拱起高度為/h2。 文獻[24]分析二個中間固定的平行曲梁受側向負荷的位移,梁的形狀為直梁受軸力 壓縮後之第一挫屈模態,文中假設其側向位移為直梁受軸力之各種挫屈模態組合,用模 態分析與有限元素法分析來模擬不同初始拱起高度曲梁之側向負荷與中點位移的關係 與挫屈後行為,文獻[24]之梁的尺寸為LT 3000m,h10m,b540m,拱起高度 m 60 的曲梁,文獻[24]中 /h6。 文獻[22]考慮了曲梁製造時的初始殘留應力,分析梁受側向分佈力時的形狀變化, 因為一個挫屈梁通常是直梁受軸向壓力製造,但是之前的文獻在分析原本製造形狀為曲 梁時很少考慮殘留應力,文中考慮的梁形狀尺寸為LT 2000m,3000m,
h
5
m
, m b10 ,拱起高度 30m,探討曲梁的平衡路徑、跳躍行挫屈與雙平衡位置,同 時也有與實驗結果比較,結果相當吻合。文獻[24]中/h6。 文獻[25]將LT 560m,h0.5m,b590m的直梁軸向跨度壓縮到500m,拱 起高度為 90.5m,再將支撐在其上的顯微鏡片旋轉15,文中將挫屈梁視為非線 性彈簧,用實驗測量及內插法求此非線性彈簧之位移負荷曲線,但是並沒有用理論分析 或數值模擬挫屈梁的非線性行為。文獻[24]中/h181。 文獻[3]分析拱起高度較高(/h100)時的兩端固定挫屈梁,受到大幅度振動的 動態行為,並且以微結構尺寸的實驗佐證,實驗的拱起高度達到/h200,[3]中發現 當挫屈梁受到大幅度振動時可會發在兩個平衡位置間生動態的跳躍現象,並且有簡諧 (simple harmonic motion, SHM)與超諧運動,文獻[3]的分析與實驗的對照現象相符, 不過僅有定性的比較,並沒有詳細的數據比較。2 文獻上分析挫屈梁受力時的靜態及動態行為時,不管側向拱起高度大小,大都僅考慮側 向位移,並使用假設模態法,並假設其側向振動位移為直梁受軸力之挫屈模態的組合, 通常假設為前兩個挫屈模態的組合。在拱起高度較小(/h10)的時候,梁挫屈前後 的變形很小,故忽略梁的軸向位移的平衡方程式,在靜態行為時的分析結果相當準確, 文獻上[12,13,22,24,26]也提供了分析與實驗結果的佐證,在動態分析的部分,文獻[23,29] 中假設側向振動位移為前兩個挫屈模態的組合,得到的結果與實驗大致吻合,但是文獻 [29]中提到/h1.5時,其實驗結果並不可靠。 當挫屈梁拱起高度較大( /h100)時,文獻[3,25]在靜態分析時仍然只考慮側向 位移,並沒有考慮到軸向位移在大拱起高度時可能不能忽略,在動態分析上仍然使用假 設模態法[8,29],假設其側向振動位移為直梁受軸力之前兩個挫屈模態的組合,且結構 的軸向力為均勻分佈,但是大拱起高度的振動頻率與振動模態與挫屈前的直梁差異性非 常大,與挫屈模態可能有更大的出入,文獻[3,25]之假設在 很大時的適用性值得進一 步探討。 本研究的主要目的為考慮幾何非線性,以共旋轉有限元素法[15-19]探討不同拱起高 度 之挫屈梁的初始變形及振動模態,檢驗證文獻中挫屈梁之初始變形的解析解[12]、 挫屈梁之振動頻率的解析解[20]之適用範圍。本文也探討不同拱起高度 之挫屈梁受側 向集中負荷時,平衡路徑上的臨界點,不同/h之挫屈梁的臨界點對應的位移或負荷可
以連成曲線,稱為摺線(fold lines)或臨界子集合路徑(critical subset paths)[9-11]。臨
界位移或負荷對/h的摺線可提供不同/h之挫屈梁受側向負荷時,其非線性行為的特
性。
本研究中採用弧長控制法[7,15]解非線性平衡方程式。自然振動的頻率方程式為一
廣義的標準特徵值問題(generalized standard eigenvalue),本文以子空間迭代法(subspace
iteration method) [1]解廣義的標準特徵值問題,追蹤平衡路徑上結構自然振動頻率與振 動模態的變化,並比較振態與挫屈模態在不同 /h的差異。本文在偵測臨界點時,利用 廣義增量迭代法[2,9-11],增加約束條件到原本的平衡方程式中,形成延伸系統(extended system),直接找臨界點的摺線,省去/h改變時重複計算平衡路徑的步驟。 本研究以數值例題探討不同細長比之挫屈梁在不同壓縮位移之拱起高度。本研究亦 以數值例題探討不同細長比、不同拱起高度之挫屈梁的自然頻率及振態的變化、不同拱 起高度之挫屈梁的受側力的非線性行為 第二章 理論推導 本章採用一致性共旋轉有限元素法[15-19],在當前的元素座標上推導梁元素之節點 變形力、節點慣性力、剛度矩陣及慣性矩陣。本章推導梁元素的方法與文獻[19]中的方 法大致相同,在此僅簡單的描述推導過程。 2.1 基本假設 本文推導梁元素時,做了以下的假設: (1) Euler-Bernoulli 假說成立。 (2) 梁元素的形心軸之單位長度伸長量(unit extension)為均勻的(uniform)。 (3) 梁元素的變形位移與旋轉為小位移與小旋轉。 (4) 梁元素的應變為小應變。 如果元素的尺寸足夠小,則基本假設(3)一定可以滿足。基於假設(4),本文使用工
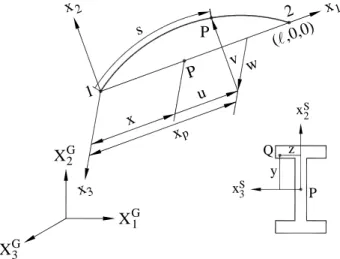
程應變(engineering strain)與工程應力作為梁元素的應變與應力之度量,為了推導方便, 本文中工程應變是由與其對應的Green strain求得。 2.2 座標系統描述 本文是使用有限元素法,將梁分割成若干個兩個節點的梁元素,節點1及節點2為元 素的兩個端點。為了描述系統的運動與梁元素的位移、變形,本文定義了兩組座標系統 (圖3): (1) 總體座標系統(Global coordinates)X1、X2 梁結構的節點座標、節點位移、節點速度、節點加速度、系統的運動方程式均在此 座標系統中定義。 (2) 元素座標系統(Element coordinates)x1、x2 元素座標系統是建立在每一梁元素當前的變形位置上,如圖3所示,元素座標系統 的原點是定義在節點1上,x1軸的方向為梁元素兩節點連線的方向,x2軸的方向由右手 定則決定,本文中梁元素的位移、變形、速度、加速度及運動方程式,均在此座標中定 義。 2.3 梁元素的變形描述 本文是在元素座標上描述梁元素的變形與幾何形狀。由2.2 節中的假設可知,梁元 素的變形可由其形心軸在元素座標上的位移及其斷面的旋轉決定。本文採用梁元素變形 前形心軸的長度為獨立變數。 圖4 中的 Q 點為梁中的任意點,P 點為 Q 點在形心軸上的對應點,即 P 點與 Q 點 位於梁的同一斷面上。在元素座標上,P 點在梁變形前後的位置向量可分別表示為{x, 0} 與{xp(x,t), v(x,t)}。其中 t 為時間,xp( tx, )及v( tx, )分別是 P 點在x1與x2軸方向的座 標。Q 點在梁變形前後的位置向量可分別表示如下 r0 {x, y} (1) r={xp ysin, ycos v } (2) x
v x v x v x v s x s v , 1 1 1 1 sin 0 0 , 0 (3) cos (1sin2)1/2 (12)1/2 s xp (4) 0 1 x s x x s (5) 其中x、y 分別為梁變形前 Q 點在x (i = 1,2)軸的座標,i 為x
1軸和形心軸的切線向量 的夾角,s 為 o 點到 P 點間形心軸在變形後的弧長,而0為形心軸的單位伸長量。由(4)、 (5)式及 2.2 節中的假設(3),xp( tx, )可以近似成下式 xp x t u
x vx dx 0 2 , 0 1 (1 12 ) ) , ( (6) 其中u1為節點1 在x1方向上的位移,由元素座標系統的定義,其值為零,但其變分及對 時間的微分並不為零。 由 (6)式及基本假設(2)可以得到形心軸的單位伸長量04
Lvxdx L L L l 0 2 , 0 21 (7) lLu2u1 其中L為梁變形前的長度,l為梁之形心軸變形後的弦長,u2為節點2 在x1方向的位移。 本文中的應變採用工程應變。為了推導上的方便,本文中先推導出Green strainij,再由Green strain求得與其對應之工程應變。Euler梁的Green strain非為零的應變只有
11 ,可表示成 ( 1) 2 1 , , 11 rtxrx (8) Green strain11與工程應變e11間的關係如下[6] e11(1211)1/21 (9) 由(2)、(8)及(9)式,且保留變形參數及其微分到二次項,可得工程應變e11如下 xx yv e110(10) , (10) 本文中假設梁元素變形後的形心軸的側向位移v(x)為
x
的三次 Hermitian 多項式。 因此(2)式之v(x)可表示成 v(x){N1, N2, N3, N4}t{v1, v1, v2, v2} Ntbub (11) (1 ) (2 ) 4 1 2 1 N , (1 )(1 ) 8 2 2 L N , (1 ) (2 ) 4 1 2 3 N , ( 1 )(1 ) 8 2 4 L N , (12) L x 2 1 (13) 其中vj(j1,2) 是v在節點 j 的節點值,vj則是 x v v 在節點 j(j1,2)之節點值, ) 4 1 (i Ni 代表形狀函數(shape function)。 2.4 梁元素的節點內力 本文利用虛功原理及 d’Alembert 原理在座標上求對應於元素節點參數的元素節點 內力。若給端點 j ( j = 1, 2 )一個虛位移 、uj 和vj ,則由虛功原理可知,對應於j 該端點的虛位移、外力所作的虛功Wext等於內力所作的虛功Wint即 int ext W W (14) 在本推導中Wext為元素的節點內力f 對節點虛位移 q 所做的功,可表示成 Wext qtf uatfa ubtfb (15) 其中 } , , , , , { 1 1 1 2 2 2 q u v u v (16) } , { u1 u2 a u (17) } , , , { 1 1 2 2 ub v v (18) } , , , , , { 11 21 1 12 22 2 f f m f f m f (19) I a D a a f f f f f { 11, 12} (20) I b D b b f m f m f f f { 21, 1, 22, 2} (21) 其中u 為軸方向的虛位移,a ub為側向的虛位移,f 、a fb為對應於u 、a ub的節 點力, (j =1,2)為節點 j 的轉角,j f (ij
i
=1,2,j =1,2)為節點 j 在x 方向的節點力,i mj(j =1,2) 為節點 j 的力矩,faD及fbD為與變形有關的節點內力,faI及fbI為與慣性力有關的節 點內力。 內力所作的虛功又分成虛應變所造成的虛功及將慣性力(質量與負的加速度之乘積) 併入徹體力(body force)所作的虛功,故內力所作的虛功可以表示成: W Ee e dV dV V t V r r int
11 11
(22) 其中E 為楊氏係數,為梁的密度,V 為梁在未變形前的體積,r 為加速度。(2.4.9)式 中,右式的第一項為應力所作的虛功,第二項為慣性力所作的虛功。 由(2)-(7)、(10)-(13)、(14)-(22)式,並保留變形參數及其微分到二次項可以得到 aD a vxxdx a L EI EA G G f 0 0
,2 (23) A dx A v dx v dx dx x x L x a a t a a I a
N N u
N (12
0 ,2
0 ,2 ) f (24) fbD Ttb[EI(10)2
Nbv,xxdx f12D
Nbv,xdx] (25)
v dx L I dx v I dx v A b b x ta a b x I b
N (1 0)2
N , 2 1 0 G u
N , f (26) 其中 Ga {1, 1} (27) } , {u1 u2 a u (28) 2 1 , 2 1 a N (29) 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 b T (30) 2.5 元素的剛度矩陣 依元素切線剛度矩陣的定義可得 q f k D (31) 其中k 為元素切線剛度矩陣, fD為元素變形節點內力,dq 表示節點參數向量q 之 真實擾動量。fD可以由(23)、(25)式中的faD、fbD組成,元素切線剛度矩陣k 可由 下列的次矩陣組合而成。 a D a aa u f k a ta L EA G G vxxdx a ta L EI G G
2 ,2 (32)6 b b b D a b D a ab u u u f u f k 2 0 a v,xx btdx 1b L EI T N G
(33) a D b ba u f k 2EI0T1bt
Nbv,xxdxGta (34) b b b D b b D b bb u u u f u f k T1btf12D
NbNbtdxT1b T1bt(EI(10)2
NbNbtdx)T1b (35) 2.6 元素的質量矩陣 元素的質量矩陣m 可表示成 q f m I (36) 其中fI可以由(24)、(26)式中的faI、fbI組成,q 是元素的節點加速度,可以表示成 q {u1,v1,1,u2,v2,2} (37) m 為一對稱矩陣,可由下列的次矩陣,利用直接勁度法[16]組合而成 j I i ij fu m , (38) 其中i,ja,b,u a {u1,u2},ub {v1,1,v2,2} 由(24)、(26)和(38)式可得 maa A a tadx a I a
N N u f (39) 0 u f m b I a ab (40) 0 u f m a I b ba (41) mbb A b tbdx I b btdx b I b
N N N N u f mT mR (42) 2.7 系統平衡方程式 本研究考慮的負荷有力負荷及位移負荷兩種,所以非線性系統的運動方程式可表示 成 Ψ(Q,λ)F(Q,λdQd)fP0 (43) 其中Ψ 為系統的不平衡力, F 為系統節點內力, Q 為系統的節點位移,d為位移負荷 參數,Q 為參考位移負荷向量,d f 為力負荷參數,P 為參考力負荷向量,其中 F 由系 統節點變形力F 、系統節點慣性力D F 組成。I F 及D F 可由(23)–(26)式中的元素節點變I形力、元素節點慣性力從當前的元素座標轉換到總體座標後組合而成。本研究在每一增 量平衡迭代的過程中,將d或是f 的值固定,(43)式中之 在迭代中代表d或是f 中 可變動的負荷參數。 若不考慮慣性力,則(43)式為非線性平衡方程式。本研究中採用弧長控制法[7]解非 線性平衡方程式。若將(43)式在靜態平衡的位置,用泰勒級數展開到一次項,則可得到 系統在靜態平衡點的線性振動方程式 0 Q K Q M (44) 其中M 為系統的質量矩陣,Q 為系統的節點加速度,K 為系統的切線剛度矩陣,Q為 靜態平衡點算起的系統節點位移。M 、 K 是由元素的質量矩陣、切線剛度矩陣從當前 的元素座標轉換到總體座標後組合而成。 若振動方程式(44)式存在自然振動頻率,則其解的形式可以表示如下 t i e Φ Q (45) 其中Φ 是振態, 是自然振動頻率。將(45)式代入(44)式可得 MΦ KΦ2 (46) (46)式為一廣義特徵值問題,振動模態Φ 是特徵向量,特徵值是2。本研究中用子空間 法[1]求挫屈梁的自然振動頻率及振態。 第三章 挫屈梁的初始變形及自由振動分析 本章中將採用第二章的共旋轉有限元素法,在 3.1 節探討挫屈梁初始變形並與解析 解比較,以檢驗解析解的準確性及適用範圍,在3.2 節探討挫屈梁的自然振動頻率及振 態並與文獻上的解析解及實驗結果比較。 本章中分析時,僅考慮長方形斷面的梁,梁的材料及幾何常數如下:彈性模數 2 11 / 10 1 . 2 N m E ,密度 7874kg/m3,長度LT 0.64m,寬度b1.95102m ,高 度h 12LT ,其中 I ALT2 為細長比。在分析時將梁離散為64 個元素。除另有說 明外,本章中都使用細長比5818.96,高度h3.81104m的梁 3.1 挫屈梁的初始變形 如圖1 所示,兩端受到側向夾持的固端梁,一端受軸向壓縮 ,當壓縮量到達其挫 屈臨界值cr 42/2時,會發生挫屈現象,本節中用切線剛度之行列式值為零,作為 判斷挫屈的準則,再以挫屈模態為擾動位移,使梁進入次要平衡路徑,求得挫屈梁之初 始變形。圖5、6 為本文的結果,圖 5 為挫屈梁的無因次中點側向位移/h-無因次壓縮 量(/cr)曲線,圖6 為無因次端點軸向反力P /PCR-梁中點的側向位移 /LT的曲線。 圖5 中的解析解為 1 3 2 h [12],該解析解是由以下假設求得的:梁挫屈後的 中心軸不可伸縮,且其側向位移為其第一挫屈模態,即 (1 cos2 ) 2 ) ( L x x v 。由圖5 可 以發現當/h30,不同細長比的梁之/h- 曲線及解析解幾乎重合,但當/h120 時,解析解和3000之/h- 曲線的差異逐漸增加。由本文的數值結果發現,當
8 200 /h 時,3000的梁之撓屈應變小於0.003,通常仍在彈性範圍內,所以 3000 左右之挫屈梁的/h可以超過 200。由圖 5 亦可以發現10000時,/h- 曲線的數 值解與解析解幾乎重合,所以解析解適用的範圍與細長比的大小有關。由圖6 可以發 現不同細長比的梁之P /PCR-/LT曲線幾乎重合;本文圖6 的結果與文獻[14]中假設梁 無伸長變形之elastica 的結果非常接近,所以當挫屈程度較大時,文獻[14]中忽略挫屈梁 的軸向變形應是恰當的。由圖6 亦可以發現當 /LT<< 1 時,P/PCR 1,但當 /LT約 為0.19 時,P/PCR 1.05。但解析解中假設其側向位移為其第一挫屈模態,所以不管 /LT 的大小,其P /PCR都等於 1,因解析解之軸向反力的誤差隨挫屈程度增加而增加,所以 圖5 中之解析解的誤差亦隨挫屈程度增加而增加。 3.2 挫屈梁的自然振動頻率及振態 本節中將探討挫屈梁之無因次自然振動頻率i /(EI/mLT4)12,其中mA為梁的線 密度,與無因次壓縮量(/cr)、無因次側向挫屈位移/h或/LT、及細長比 的 關係。本文的數值分析發現,500,/h24.4 (/LT 0.169),bmax 0.0120; 1000 , /h90.3 ( /LT 0.313 ) , bmax 0.0126 ; 3000 , /h271 (/LT 0.313),bmax 4.20103。因本文中假設應變為小應變且在彈性限內,所以 本節中對不同細長比的挫屈梁,考慮不同的最大無因次側向挫屈位移/h或/LT。 圖7-9 為本文的結果,圖 7 為挫屈梁的無因次自然振動頻率i/(EI/mL4T)12-無因 次側向位移/h的曲線(/h3,i = 1, 2),圖 8 為挫屈梁的無因次自然振動頻率 2 1 4) / /( T i EI mL -無因次側向位移/h的曲線(/h8, i = 1-7),圖 9 為挫屈梁的無因次 自然振動頻率i /(EI/mL4T)12-無因次側向位移/h的曲線(/h50, i = 1-4)。 由圖 7 可以發現固端梁在挫屈後,對應於第一及第二個振態之自然振動頻率的變 化,在挫屈時( 1, /h0),1 0;在挫屈後( 1), 隨著1 增加而增加,且在 5 . 3 (/h1.8)左右超越 ,2 幾乎沒有改變。由圖 7 可以發現,當2 /h1.5,本 文的 與[29]的實驗及分析結果、[8,20,21]的分析結果都很接近,當1 /h1.5,本文的1 與[8,20,21]的分析結果很接近,但偏離[29]的實驗及分析結果,[29]提到 /h1.5時,其 實驗結果是不可靠的。本文的 與[8,20,21]的分析結果很接近。由圖 8 可以發現,當2 8 /h , 本 文 的i (i = 1-7) 與 [8,20,21] 的 分 析 結 果 很 接 近 。 本 文 圖 7 、 8 的 2 1 4) / /( T i EI mL 是 由 細 長 比 5818.96 之 挫 屈 梁 求 得 的 , 在 [8,20,21] 中 , 2 1 4) / /( T i EI mL 與 細 長 比 的 大 小 無 關 , 且 當 i 是 偶 數 時 , 不 管/h 的 大 小 , 2 1 4) / /( T i EI mL 為一個常數,但由圖 9 可以發現,當/h10除了 i = 2 以外, 2 1 4) / /( T i EI mL 的大小都與細長比及/h的大小有關。由圖9 亦可以發現不同細長比 的挫屈梁之i/(EI/mL4T)12(i = 1, 3, 4)的差異都隨/h增加而增加。
第四章 挫屈梁受側向負荷之幾何非線性分析 本例題將分析如圖 10 所示的挫屈梁受到側向集中負荷 P 時的平衡路徑及臨界負 載,本例題僅考慮矩形斷面的直梁,其斷面寬度b1.95102m ,高度h 12LT , 其中為細長比,長度LT 0.64m,彈性模數E2.11011N/m2。在分析時除另有說明 外,都使用斷面高h3.81104m ,細長比5818.96的梁,並將其離散為64 個元素。 令 為挫屈梁的軸向壓縮、 為挫屈梁中點C的初始側向高度,C、v 、C u 分別C 為 為 中 點C受負荷P後的側向高度,側向與軸向位移。圖11為無因次軸向壓縮量 3 , 2 . 2 , 7 . 1 時的側向負荷 EI PLT2 -側向位移 h vC 曲線,其中 CR ,CR為第一個 側向挫屈模態發生時的軸向壓縮量。由圖11可以發現在平衡路徑上,臨界點的種類及位 置會隨 不同而改變, 1.7、2.2和3平衡路徑上都存在兩個極限點Lj,ju,d,但只 有在 2.2和3時,存在分歧點Bj ,ju,d ,且 2.2時,分歧點發生極限點之後,即 分歧點發生在不穩定區; 3時,分歧點發生極限點之前,即分歧點發生在穩定區。若 將不同 之挫屈梁受側向負荷時,其平衡路徑上之臨界點對應的位移(/高度)或負荷對 連成曲線,則稱為摺線(fold lines)。臨界位移或負荷對 的摺線可提供不同 之挫屈梁 受側向負荷時,其非線性行為的特性。 圖 12 為 80時,500,104的挫屈梁中點 C 的初始側向高度 、分歧點高度 h B CR/ 與極限點高度CRL /h在無因次化高度 h C -軸向壓縮位移 平面的摺線圖,圖 13 為同情形下分歧點負載P 與極限點負載CRB L CR P 在無因次化負載 EI PLT2 -軸向壓縮位移 平 面的摺線圖,在 80(/h10)時,500的挫屈梁最大撓曲應變約為5103,仍 在結構的彈性範圍內,由圖12,13 可以發現在 80時,500的臨界點與 104的無 因次化結果相當接近,故在/h10時,不同細長比的挫屈梁臨界點對應的無因次負載 與高度都很接近,所以不同細長比的挫屈梁可以共用同一摺線圖。由圖12,13 亦可以得 知除了 很小外,分歧點都比極限點先發生,且 愈大,兩者發生的位置相差愈遠。 圖 14 為1000,3000,104的梁在 3104(拱起高度約 200 h )時,對應於分 歧點之中點 C 的高度 B CR 與對應於極限點之中點 C 的高度 L CR 在無因次化高度 h C -軸向 壓縮位移 平面上的摺線圖,圖中Analy.為中點C 之初始側向高度,圖 15 為同情形下分 歧點點負載P 與極限點負載CRB L CR P 在無因次化負載 EI PLT2 -軸向壓縮位移 平面上的摺線 圖。由圖14,15 可以看到在 3000 ( 60 h )時,1000與 104的極限點之無因次 化結果有相當的差異,且 愈大,兩者的差異愈大;在 12000 (/h120)時,3000 與 104的極限點之CRL /h有相當的差異,但對應於分歧點之CRB /h差異還不太大。 故在/h60時,所以不同細長比的挫屈梁不可以共用同一摺線圖。
10 第五章 結論 本研究以共旋轉有限元素法及非線性梁理論的一致性二階線性化推導挫屈梁的平 衡方程式及運動方程式。將挫屈梁的運動方程式用泰勒級數在挫屈梁的初始變形位置展 開,取到一次項,求得挫屈梁線性振動的運動方程式。本研究探討了探討挫屈梁的初始 變形與自然振動,及不同拱起高度之挫屈梁的受側力的非線性行為。 本研究的數值結果發現挫屈梁初始變形之解析解的適用範圍與挫屈梁細長比的 大小有關,細長比愈大,則解析解的適用範圍愈大。 本研究的數值結果發現,當挫屈梁拱起高度與梁之厚度比(/h)小於 50 時,挫屈梁 前兩個無因次自然振動頻率與梁之細長比幾乎無關,這與文獻的結果一致;但當挫屈梁 之/h大於10 時其第三及第四個無因次自然振動頻率與/h及梁之細長比都有很大的 關係。這與文獻上的結論不同,文獻上認為挫屈梁之第奇數個無因次自然頻率僅與挫屈 梁之/h有關,與梁之細長比無關,第偶數個無因次自然頻率為一常數,與梁之/h、 細長比都無關。 本研究的數值結果發現,當挫屈梁拱起高度與梁之厚度比(/h)小於 10 時,不同細 長比的挫屈梁臨界點對應的無因次負載與高度都很接近,所以不同細長比的挫屈梁可以 共用同一摺線圖;但當挫屈梁之/h大於60 時,不同細長比的挫屈梁不可以共用同一 摺線圖。
參 考 文 獻
[1] Bathe, K. J., “Finite element procedures” Prentice-Hall, New Jersey, 1996.
[2] Battini, J.-M., Pacoste, C., and Eriksson, A., “Improved minimal augmentation procedure for the direct computation of critical points” Computer Methods in Applied Mechanics and Engineering, Vol. 192, No. 16-18, pp. 2169–2185, 2003.
[3] Buchaillot, L., Millet, O., Quevy, E., and Collard D., “Post-buckling dynamic behavior of self-assembled 3D microstructures” Microsystem Technologies Vol. 14 No. 1 pp. 69-78 2007.
[4] Casals-Terre, J., and Shkel, A. M., “Snap-action bistable micromechanism actuated by nonlinear resonance” IEEE Sensors (IEEE Cat. No.05CH37665C) pp. 893–896, 2005. [5] Casals-Terre, J., Fargas-Marques, A., and Shkel, A. M., “Snap-action bistable
micromechanisms actuated by nonlinear resonance” Journal of Microelectromechanical Systems, Vol. 17, No. 5 pp. 1082– 1093, 2008.
[6] Chung, T. J., “Continuous Mechanics” Prentice Hall, Englewood Cliff, New Jersey, 1988.
[7] Crisfield, M. A., “A consistent corotational formulation for nonlinear, 3-dimensional, beam-elements” Computer Methods in Applied Mechanics and Engineering, Vol. 81, No. 2, pp. 131–150, 1990.
[8] Emam, S. A., “A Theoretical and Experimental Study of Nonlinear Dynamics of Buckled Beams” PhD dissertation, Virginia Polytechnic Institute and State University, Blacksburg, VA, 2002.
[9] Eriksson, A., “Fold lines for sensitivity analyses in structural instability” Computer Methods in Applied Mechanics and Engineering, Vol. 114, No. 1-2, pp. 77–101, 1994. [10] Eriksson, A., “Structural instability analyses based on generalised path-following”
Computer Methods in Applied Mechanics and Engineering, Vol. 156, No. 1-4, pp. 45–74, 1998.
[11] Eriksson, A., Pacoste, C., and Zdunek, A., “Numerical analysis of complex instability behaviour using incremental-iterative strategies” Computer Methods in Applied Mechanics and Engineering, Vol. 179, No. 3-4, pp. 265–305, 1999.
[12] Fang, W., and Wickert, J. A., “Post buckling of micromachined beams” Journal of Micromechanics and Microengineering, Vol. 4, No. 3, pp. 116–122, 1994.
[13] Gerson, Y., Krylov, S., Ilic, B., and Schreiber, D., Large displacement low voltage multistable micro actuator"21st IEEE International Conference on Micro Electro Mechanical Systems ( MEMS 2008), pp. 463–466, 2008.
[14] Heijden, G. H. M., Neukirch, S., Goss, V. G. A., and Thompson, J. M. T., “Instability and self-contact phenomena in the writhing of clamped rods.” International Journal of Mechanical Sciences, Vol. 45, pp. 161-191, 2003.
[15] Hsiao, K. M. and Hou, F. Y., “Nonlinear finite-element analysis of elastic frames” Computers & Structures, Vol. 26, No. 4, pp. 693–701, 1987.
[16] Hsiao, K. M., and Jang, J. Y., “Nonlinear dynamic analysis of elastic frames” Computers & Structures, Vol. 33, No. 4, pp. 1057–1063, 1989.
[17] Hsiao, K. M., and Jang, J. Y., “Dynamic analysis of planar flexible mechanisms by corotational formulation” Computer Methods in Applied Mechanics and Engineering, Vol. 87, No. 1, pp. 1–14, 1991.
[18] Hsiao, K. M., “Corotational total lagrangian formulation for 3-dimensional beam element” AIAA Journal, Vol. 30, No. 3, pp. 797–804, 1992.
12
non-linear dynamic analysis of planar beam” International Journal for Numerical Methods in Engineering, Vol. 37, No. 1, pp. 75–89, 1994.
[20] Nayfeh, A. H., Kreider, W., and Anderson, T. J., “Investigation of natural frequencies and mode shapes of buckled beams.” AIAA Journal, Vol. 33, No. 6, pp. 1121–1126, 1995.
[21] Nayfeh, A. H., and Emam, S. A., “Exact solution and stability of postbuckling configurations of beams” Nonlinear Dynamics, Vol. 54, No. 4 pp. 395–408 , 2008. [22] Park, S., and Hah, D., “Pre-shaped buckled-beam actuators: Theory and experiments”
Sensors and Actuators A: Physical, Vol. 148, No. 1, pp. 186–192, 2008.
[23] Poon, W. Y., Ng, C. F., and Lee, Y. Y., “Dynamic stability of a curved beam under sinusoidal loading” Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering Vol. 216 No. G4 pp. 209-217 2002.
[24] Qiu, J., Lang, J. H., and Slocum, A. H., “A curved-beam bistable mechanism” Journal of Microelectromechanical Systems, Vol. 13, No. 2 pp. 137– 146, 2004.
[25] Quévy E., Buchaillot, L., Bigotte, P., and Collard, D., “Large stroke actuation of continuous membrane for adaptive optics by 3D self-assembled microplates” Sensors and Actuators A: Physical Vol. 95 No. 2 pp. 183-195 2002.
[26] Rossiter, J., Stoimenov, B., and Mukai, T., “A bistable artificial muscle actuator” 2006 IEEE International Symposium on Micro- NanoMechatronics and Human Science (IEEE Cat. No. 06TH8922C) pp. 35-40, 2006.
[27] Samuel, B. A., Desai, A. V., and Haque, M. A., “Design and modeling of a MEMS pico-Newton loading/sensing device” Sensors and Actuators A: Physical, Vol. 127, No. 1, pp. 155-162, 2006.
[28] Tsai, M. H., Chang, C. W., and Hsiao, K. M., “Nonlinear analysis of planar beams under displacement loading” The First South-East European Conference on Computational Mechanics, SEECCM-06, Kragujevac, Serbia and Montenegro, 2006.
[29] Tseng, W. Y., and Dugundji, J., “Nonlinear vibrations of a buckled beam under harmonic excitation” ASME Journal of Applied Mechanics Vol. 38 No. 2 pp. 467-476 1971.
[30] 黃智傑, “旋轉三維 Timoshenko 梁之振動分析” 國立交通大學機械工程學系, 碩士 論文, 台灣, 新竹, 2001
圖1 直梁一端受軸向壓縮及側向挫屈示意圖
)
(a
)
(b
C
2X
2X
1X
1X
TL
C
A
B
A
B
M
B AM
P
b
h
14
0.00
0.0
b
a
h
v
C
P
b a
bL
1 bB
2 bB
1 aS
2 1S
aL
1 aL
2 bS
2 bL
2 圖2 挫屈梁受側向集中力 P 的位移-負荷曲線圖圖3 元素座標系統及總體座標系統關係圖 圖4 梁的變形圖
2
O
1x
1X
oX
oY
2X
1
2 e
1
2x
1 P Q y 1 x 2 x s ) (x v ) (x xp 1 2 x 1 x y x Q16
0
5
10
15
20
25
30
0
50
100
150
200
h
Analy.
0.0
0.5
1.0
0
20
40
圖5 挫屈梁的
h
曲線0.00
0.05
0.10
0.15
0.20
1.00
1.01
1.02
1.03
1.04
1.05
0.5
10
(
10
3
)
L
T
P
P
CR
圖6 挫屈梁的無因次端點軸向反力P /
P
CR-中點側向位移
/
L
T曲線18
0.0
0.5
1.0
1.5
2.0
2.5
3.0
0
10
20
30
40
50
60
70
80
i/ (
EI
/ mL
T 4)
1/2
h
Present
Present
[29] Exp
[29]
[29]
[8]
[8]
圖7 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
T4)
12-無因次側向位移
/
h
的曲線 (
/
h
3
,i =1,2)
0
1
2
3
4
5
6
7
8
0
100
200
300
400
500
600
[8]
Present
i/ (
EI
/ mL
T 4)
1/2
h
i = 1
i = 2
i = 3
i = 4
i = 5
i = 6
i = 7
圖8 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
T4)
12-無因次側向位移
/
h
的曲線 (
/
h
8
,i =1,7)20
0
10
20
30
40
50
0
50
100
150
200
250
300
i/ (
EI
/
AL
4)
1/ 2
h
i = 3
i = 4
i = 1
i = 2
圖9 挫屈梁的無因次自然振動頻率
i/(
EI
/
mL
4T)
12-無因次側向位移/h的曲線圖10 挫屈梁結構中點C 受側向集中力 P 的結構圖
b
h
2X
1X
TL
C
A
B
C
2X
1X
A
B
2
/
2
/
)
(a
)
(b
Cv
P
,
Cu
22
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
-0.1
0.0
0.1
0.2
B
2.2
u
L
2.2
u
L
1.7
d
B
2.2
d
L
2.2
d
B
3
d
L
3
d
L
3
u
L
1.7
u
O
PL
T
2
/
EI
=3
=2.2
=1.7
B
3
u
- v
C
/ h
圖11 挫屈梁受側向集中力P 的h
v
EI
PL
T2
C 曲線圖(
1
.
7
,
2
.
2
,
3
)0
20
40
60
80
0
2
4
6
8
10
0.5
10
C
/ h
CR
CR
L
圖12 不同細長比
挫屈梁臨界點在
h
C 平面的摺線圖(
80
)24
0
20
40
60
80
0
1
2
3
P
B
CR
P
L
CR
0.5
10
PL
2
/ E
I
(1
0
4
)
圖13 不同細長比
挫屈梁臨界點在
EI
PL
T2 平面的摺線圖(
80
)0
1
2
3
0
50
100
150
200
Analy.
CR
L
CR
1
3
10
C
/
h
圖14 不同細長比
挫屈梁臨界點在
h
C 平面的摺線圖(
3
10
4 )26
0
1
2
3
0
1
2
3
4
5
6
1
3
10
PL
T
2
/ E
I (1
0
5
)
P
L
CR
P
B
CR
圖15 不同細長比
挫屈梁臨界點在
EI
PL
T2 平面的摺線圖(
3
10
4)國科會補助專題研究計畫成果報告自評表
請就研究內容與原計畫相符程度、達成預期目標情況、研究成果之學術或應用價值 (簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)、是否適合在 學術期刊發表或申請專利、主要發現或其他有關價值等,作一綜合評估。1.
請就研究內容與原計畫相符程度、達成預期目標情況作一綜合評估 達成目標 □ 未達成目標(請說明,以 100 字為限) □ 實驗失敗 □ 因故實驗中斷 □ 其他原因 說明: 本研究內容與原計畫完全相符,並達成預期目標。本研究的數值結果發現挫 屈梁初始變形之解析解的適用範圍與挫屈梁細長比的大小有關,細長比愈大, 則解析解的適用範圍愈大 本研究的數值結果發現挫屈梁之/h大於 10 時其第三及第四個無因次自然振動 頻率與/h及梁之細長比都有很大的關係。糾正了文獻上認為挫屈梁之第奇數 個無因次自然頻率僅與/h有關,第偶數個無因次自然頻率為一常數,與/h、 梁之細長比都無關的錯誤說法。本人的發現在非淺挫屈梁的研究及應用上應有 相當的貢獻。2.
研究成果在學術期刊發表或申請專利等情形: 論文:□已發表 □未發表之文稿撰寫中 □無 專利:□已獲得 □申請中 □無 技轉:□已技轉 □洽談中 □無 其他:(以 100 字為限)28
3.
請依學術成就、技術創新、社會影響等方面,評估研究成果之學術或應用價值 (簡要敘述成果所代表之意義、價值、影響或進一步發展之可能性)(以 500 字 為限) 本研究的數值結果發現挫屈梁初始變形之解析解的適用範圍與挫屈梁細長比 的大小有關,細長比愈大,則解析解的適用範圍愈大 本研究的數值結果發現挫屈梁之/h大於 10 時其第三及第四個無因次自然振動 頻率與/h及梁之細長比都有很大的關係。糾正了文獻上認為挫屈梁之第奇數 個無因次自然頻率僅與/h有關,第偶數個無因次自然頻率為一常數,與/h、 梁之細長比都無關的錯誤說法。本人的發現在非淺挫屈梁的研究及應用上應有 相當的貢獻。本研究的結果影可以發表在學術期刊,供設計挫屈梁時參考。計畫編號 100-2221-E-009-098- 計畫名稱 受側向負荷之挫屈梁的靜態及動態行為研究 出國人員姓名 服務機關及職稱 蕭國模 國立交通大學機械系 教授
會議時間地點 London, U.K., 4 - 6 July, 2012
會議名稱 The 2012 International Conference of Mechanical Engineering (ICME'12)
一 參加會議的經過
本人承國科會補助才能參加此會議,在此深表感謝。
本會議為2012年國際機械工程會議(The 2012 International Conference of Mechanical Engineering, London, United Kingdom),於今年7月4日至7月6日在英國倫敦帝國理工學院(Imperial College)之 the Wolfson Education Centre at the Hammersmith Campus舉行。本會議是由International Association of Engineers (IAENG)主辦之the World Congress on Engineering 2012(WCE 2012)中的一個子會議。 本會議為一國際性的學術研討會,其主要的目的是要讓在機械工程中不同領域的研究人員聚 在一起,交換機械工程力學之最新發展的資訊及想法。本研討會在機械工程的研究上有很高的學 術地位。
WCE 2012為一個大型的國際會議,共有1183篇論文投稿,但只有接受646篇,接受率約55%。 本會議並邀請振動學界的大師做專題演講,如 Prof. Len Gelman, Cranfield University, UK, Prof. Alexander M. Korsunsky, Trinity College, University of Oxford, U.K, University of Ontario Institute of Technology, Canada Bale Viswanadha Reddy 教授。
本會議論文的主題分為 Aerodynamics Fluid Dynamics Compressible Flows Computational Mechanics Biomechanics Automotive Engineering Heat and Mass Transfer Nanomaterial Engineering Plasticity Mechanics Fracture Geomechanics Multibody Dynamics Nonlinear Dynamics Structural Dynamics Vibrations Acoustics Noise Control Material Engineering Transport Phenomena Manufacturing Process Mechatronics
本人與研究生在會議中發表論文一篇,名稱為「Free Vibration Analysis of Rotating Euler Beam by Finite Element Method」,本人的論文探討了旋轉梁之側向及軸向振動的耦合現象,本人的研究提 出一個共旋轉有限元素法求旋轉梁的穩態變形及自然頻率,也對耦合振動做了進一步的研究,探 討了在不同細長比之旋轉梁的穩態變形及自然振動頻率及振態。
二 與會心得與建議
本會議雖然很大,但一切都安排的井井有條,招待上相當用心。 三 攜回資料
本會議論文發表在IAENG journal 的 Engineering Letters, 20:3, pp253-258, ISSN: 1816-0948
(online version); 1816-093X (print version), Subject Category: Computer science and engineering, Published by: International Association of Engineers