國立臺灣大學理學院海洋研究所 碩士論文
Institute of Oceanography College of Science
National Taiwan University Master thesis
澎湖桶盤嶼東側外海的海床形貌分類調查研究 The Study of Seabed Morphological Classification in the
Eastern Offshore of Tungpanyu (Penghu)
李玉涵 Yu-Han Lee
指導教授:宋國士博士 Advisor:Gwo-Shyh Song,Ph.D.
中華民國 101 年 1 月
January,2012
I
II
致 致 致 致謝 謝 謝 謝
兩年半的時間過去了,想起當初不顧家人反對,堅持繼續唸研究所,開始了 半工半讀的碩士生涯,雖然多了些大學時期沒遇過的煎熬與挫折,然而走到這一 刻時,我的心情卻是前所未有的愉悅,很高興自己又成長了!能夠克服這段期間內 所遇到的種種挫折,正式告別學生生涯,朝下一個人生目標邁進。
感謝宋老師在這兩年半期間對我的指導,讓我能夠按照自己的興趣去做想做 的研究,也謝謝口委羅博士與張教授在百忙之中抽空來參加我的口試,並給我許 多論文上的寶貴建議。此外也謝謝佩琨學長、明龍學長、凱惠學姊、建鋒學長、
宗甫學長、芸如學姊和子軒學長幫助我解決了不少關於論文資料處理的問題,也 給了我許多寫論文時非常受用的建議,還要謝謝翔智學長給我打工的機會,因為 您們我才能順利地完成論文,謝謝您們!
另外要感謝與我一同奮鬥的夥伴們:益緯、紀辛、照雄、昌駿、文蕙、皓方、
玟錦、佳芳、雅婷,因為你們讓我的碩士生活更有樂趣。此外也要謝謝可愛、上 進又充滿活力的學弟妹們:又嘉、泓群、芝瑩、廷毅、定遠、琇文、昭瑜,有你 們實驗室就有歡笑!感謝廷毅,在大家都跑回家過年的時候還願意留在海洋所協 助我處理口試的雜務,不會忘記這份恩情的!也要特別感謝又嘉,總是不厭其煩 地聽我訴說我的煩惱,幫我加油打氣,要離開了真是超捨不得妳的!還有從大學 到現在總是與我一起奮鬥的好友烱揚,謝謝你把好運分給了我,讓我順利通過口 試,我們的友誼要一直維持下去喔!
最後,要感謝我最愛的奇霖,謝謝你在最後這半年時出現在我身邊,雖然現 在的你人在日本,當我每晚趕論文資料、寫論文的時候,你總是在電腦的另一端 默默陪伴著我,不斷地給我鼓勵,為我打氣。未來我也會一直陪著你,做你最忠 實的粉絲,幫你加油,我們要一直走下去,一起朝夢想邁進喔!
III
摘要 摘要 摘要 摘要
目前對於海床地貌與底質辨識研究所使用的聲學儀器主要為側掃聲納,藉由 人工判讀聲學影像的回散射能量強弱與紋理型態,來得到海床地貌、底質的資訊,
這樣的方式雖然有效,卻欠缺客觀性。因此,本研究利用加拿大 QTC 公司研發的 SwathView 軟體來進行聲學影像分類的工作,其特點為利用影像分割法將側掃聲 納影像數化,我們將其應用在桶盤嶼東側外海海域的側掃聲納地貌探測資料,並 配合地形調查、地質探勘、底質沉積物採樣及水下攝影的結果,來探討 SwathView 軟體能否準確能否準確地將不同底質類型的海床進行分類,特別是區分有珊瑚生 態的岩石海床與無珊瑚生態的岩石海床,並將分析結果與側掃聲納影像進行對 照,來評估利用側掃聲納影像區分有珊瑚生態的岩石海床與無珊瑚生態的岩石海 床是否可行。
研究結果顯示,研究區域的地形深度介於 0~60 公尺之間,根據地形特性可 將研究區域分為風櫃近岸區、中央水道區及桶盤近岸區。而研究區域涵蓋的底質 種類包括砂質海床、岩石海床及有珊瑚分佈的岩石海床,其中風櫃近岸區的底質 以砂質海床為主,海床表面最平坦;中央水道區的底質以岩石海床為主,海床上 有砂礫與貝類生物碎屑覆蓋,部份區域有少量珊瑚分佈,海床表面較崎嶇;桶盤 近岸區的底質則以珊瑚分佈的岩石海床為主,海床上的沉積物相當少,並有較多 珊瑚分佈,海床表面最崎嶇。
利用 QTC SwathView 軟體對研究區域的側掃聲納影像進行分析所得到的分 類結果,與底質沉積物採樣結果及水下攝影影像進行對比後顯示,若軟體對聲學 影像有足夠的解析力,則可有效地將具有不同聲學特性的底質類型進行分類。此 外,軟體分類結果與側掃聲納影像對照後顯示,利用側掃聲納影像來區分有珊瑚 生態的岩石海床與無珊瑚生態的岩石海床是可行的。
IV
Abstract
At present, the acoustic instrument mainly used for the researchs of seabed morphology and habitat classification is side-scan sonar, to get the informations of seabed morphology and habitat by using artificial identification for the acoustic images with back-scatter energy intensity and texture patterns.This method is effective but lack objectivity. Therefore,we use SwathView which produced by QTC in Canada to process acoustic classification.The main feature of SwathView is segmentation method.We apply SwathView to analyze the side-scan sonar data of Eastern Offshore of Tungpan Yu, Penghu,with the result of topography investigation、morphology survey ,sample of habitat sediments and underwater photography to discuss the accuracy of seabed classification by using SwathView, specifically distinguish the coral rocky seabed and the no-coral rocky seabed.We also compare the SwathView analysis results and the side-scan sonar images,to evaluate the feasibility for using the side-scan sonar images to distinguish the coral rocky seabed and the no-coral rocky seabed.
The results show that the study area depth ranges between 0 and 60m,and the study area can be divided into Fongguei Coastal Zone , Central Channel Zone and Tungpan Coastal Zone.And the habitat types of the study area consists of sand,rock and coral. The habitat type of Fongguei Coastal Zone is sand mainly,and the seabed is very flat. The habitat type of Central Channel Zone is rock mainly,there are many gravels and shell scraps on the seabed, part of the zone has some coral,and the seabed is rugged. The habitat type of Tungpan Coastal Zone is coral mainly,the seabed is very rugged ,and the seabed has many corals,less semidents.
Comparison of the analysis results by using QTC SwathView for the side-scan sonar data ,sample of habitat sediments and underwater photography images,we get the conclusion that QTC SwathView can classify the habitat types which have different acoustic characteristics effectively if the software have enough image resolution.In addition, comparing the SwathView analysis results and the side-scan sonar images,we get the conclusion that the way of using the side-scan sonar images to distinguish the coral rocky seabed and the no-coral rocky seabed is feasible.
V
目錄 目錄 目錄 目錄
審定書 審定書 審定書
審定書 ... I 致謝
致謝 致謝
致謝 ... II 摘要
摘要 摘要
摘要 ... III
Abstract ... IV
目錄目錄 目錄
目錄 ...V 圖目錄圖目錄
圖目錄圖目錄 ...VII 表目錄
表目錄 表目錄
表目錄 ... XI 第一章第一章
第一章第一章 緒論緒論緒論緒論 ...1
1-1 前言 ...1
1-2 研究動機與目的 ...2
1-3 前人研究 ...4
1-4 論文章節與綱要說明 ...6
第二章 第二章 第二章 第二章 研究方法研究方法研究方法研究方法 ...7
2-1 地形調查 ...7
2-1-1 使用儀器介紹 ...9
2-1-2 資料處理 ...13
2-2 地貌探測 ...16
2-2-1 使用儀器介紹 ...19
2-2-2 資料處理 ...21
2-3 底質沉積物採樣 ...23
2-3-1 使用儀器介紹 ...23
2-3-2 現場作業流程 ...23
2-4 水下攝影 ...26
2-4-1 使用儀器介紹 ...27
VI
2-4-2 現場作業流程 ...27
2-5 地質調查 ...29
2-5-1 使用儀器介紹 ...30
2-5-2 資料處理 ...31
第三章 第三章 第三章 第三章 研究結果研究結果研究結果研究結果 ...32
3-1 風櫃近岸區 ...35
3-2 桶盤近岸區 ...37
3-3 中央水道區 ...40
第四 第四 第四 第四章章章章 海床生態與地形地貌的關係海床生態與地形地貌的關係海床生態與地形地貌的關係海床生態與地形地貌的關係 ...46
4-1 側掃聲納影像分類 ...46
4-1-1 海床分類軟體介紹 ...46
4-1-2 海床初步分類與判釋 ...52
4-1-3 分類結果展示 ...57
4-2 海床生態與地形地貌的關係 ...61
4-2-1 特定區域底質分析說明 ...61
4-2-2 特定區域底質分析資料展示 ...63
4-2-3 分析結果展示 ...84
4-3 分析結果討論 ...85
第五第五 第五第五章章章章 結論結論結論結論 ...86
參考文獻 參考文獻 參考文獻參考文獻 ...87
VII
圖 圖
圖 圖目錄 目錄 目錄 目錄
圖 1-1 側掃聲納影像圖 ...2
圖 1-2 海軍海洋測量局於桶盤嶼東部海域得到的地形、底質調查結果...5
圖 1-3 澎湖群島部分海域珊瑚分佈示意圖...5
圖 2-1 多音束測深示意圖...8
圖 2-2 風櫃至桶盤間海域多音束測深機測線規劃圖 ...8
圖 2-3 多音束測深系統結構組織圖...10
圖 2-4 SeaBeam 1180 型多音束測深機 ...10
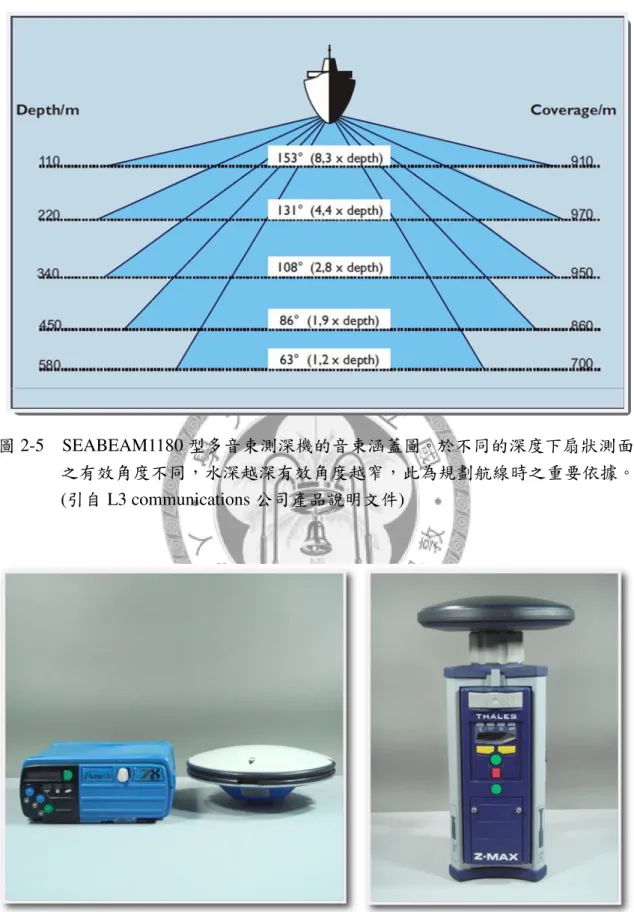
圖 2-5 SEABEAM1180 型多音束測深機的音束涵蓋圖...11
圖 2-6 Ashtech 公司及 Thales 公司所生產的衛星接收儀 ...11
圖 2-7 船體姿態擺動示意圖...12
圖 2-8 TSS 公司所出產的 DMS2-05 型船體運動感測器...12
圖 2-9 TSS 公司所出產之 SG BROWN Meridian Surveyor 電羅經...12
圖 2-10 由溫鹽深儀所量測到的聲速剖面...14
圖 2-11 桶盤潮位站所量測到之潮位值...14
圖 2-12 將疊合測試所推估的誤差量輸入 HYPACK 軟體中可修正水深值...15
圖 2-13 音鼓發射產生測深點之測深剖面圖 ...15
圖 2-14 側掃聲納作業示意圖 ...17
圖 2-15 側掃聲納示意圖...17
圖 2-16 側掃聲納聲波強度與角度關係圖...18
圖 2-17 風櫃至桶盤間海域側掃聲納測線規劃圖...18
圖 2-18 側掃聲納系統結構組織圖...20
圖 2-19 側掃聲納系統儀器照片及施測時軟體展示畫面...20
圖 2-20 側掃聲納收錄示意圖 ...22
圖 2-21 風櫃至桶盤間海域底質沉積物採樣路徑規劃圖...24
VIII
圖 2-22 進行底質沉積物採樣使用的抓斗式採泥器 ...24
圖 2-23 底質沉積物採樣作業情形...25
圖 2-24 風櫃至桶盤間海域之水下攝影路徑規劃圖 ...26
圖 2-25 水下攝影機設備...28
圖 2-26 水下攝影作業情形...28
圖 2-27 變頻式淺層震測剖面系統(Chirp)作業示意圖...29
圖 2-28 EdgeTech SB-216S 拖魚及 X-Star 資料收集處理系統 ...30
圖 3-1 研究區域海底地形圖...33
圖 3-2 研究區域地形剖面圖...34
圖 3-3 研究區域 3D 地形圖...34
圖 3-4 風櫃近岸區海底地形圖 ...35
圖 3-5 風櫃近岸區震測剖面圖 ...35
圖 3-6 側掃聲納影像圖 ...36
圖 3-7 在風櫃近岸區水深 20 公尺處採集到的表層沉積物 ...36
圖 3-8 桶盤近岸區海底地形圖 ...37
圖 3-9 桶盤近岸區震測剖面圖 ...38
圖 3-10 側掃聲納影像圖...39
圖 3-11 側掃聲納影像圖...39
圖 3-12 中央水道區海底地形圖...41
圖 3-13 中央水道區震測剖面圖...41
圖 3-14 側掃聲納影像圖...42
圖 3-15 在中央水道區水深 40 公尺處採集到的表層沉積物 ...42
圖 3-16 側掃聲納影像圖...44
圖 3-17 側掃聲納影像圖...44
圖 3-18 側掃聲納影像圖...45
圖 3-19 側掃聲納影像圖...45
IX
圖 4-1 於 SwathView 視窗中看到的側掃聲納影像 ...47
圖 4-2 影像補償前原始聲納影像圖...48
圖 4-3 影像補償後的聲納影像圖...48
圖 4-4 進行影像分割後的影像圖...49
圖 4-5 進行 FFV 編修過濾品質不好的資料點區域...50
圖 4-6 PCA 分析後產生之 Q-Space ...50
圖 4-7 K-means 分群與 BIC 分數...51
圖 4-8 研究區域經分析後的 K-means 分類視窗圖...53
圖 4-9 各個類別所代表的顏色以及各個類別的 FFV 數量...53
圖 4-10 研究區域側掃聲納原始影像與初步分類影像...54
圖 4-11 各個群集 FFV 數量直方圖...55
圖 4-12 各個群集 FFV 數量百分比...55
圖 4-13 研究區域所有 FFV 於 Q-Space 上的分佈形態...56
圖 4-14 經判釋整理後產生的底質分類圖...58
圖 4-15 研究區域底質採樣採樣點分佈及採樣點 2~10 樣本照片...59
圖 4-16 研究區域底質採樣採樣點分佈及採樣點 11~16 樣本照片...60
圖 4-17 特定區域分佈位置與其範圍所涵蓋之採樣點...62
圖 4-18 A 區在矩形長寬 8×8(m)設定值下得到的分類結果 ...64
圖 4-19 A 區分類結果之分佈型態與個別涵蓋之資料點數 ...64
圖 4-20 A 區資料點於 Q-space 上的分佈...65
圖 4-21 B 區在矩形長寬 8×8(m)設定值下得到的分類結果...66
圖 4-22 B 區分類結果之分佈型態與個別涵蓋之資料點數...66
圖 4-23 B 區資料點於 Q-space 上的分佈...67
圖 4-24 C 區在矩形長寬 8×8(m)設定值下得到的分類結果...68
圖 4-25 C 區分類結果之分佈型態與個別涵蓋之資料點數 ...68
圖 4-26 C 區資料點於 Q-space 上的分佈...69
X
圖 4-27 A 區在矩形長寬 4×4(m)設定值下得到的分類結果 ...73
圖 4-28 A 區分類結果之分佈型態與個別涵蓋之資料點數 ...73
圖 4-29 A 區資料點於 Q-space 上的分佈...74
圖 4-30 A 區的側掃聲納影像與分類結果之分佈型態與側掃聲納影像之疊合...75
圖 4-31 採樣點 7 所在區域之水下攝影影像 ...76
圖 4-32 採樣點 8 所在區域之水下攝影影像 ...76
圖 4-33 B 區在矩形長寬 4×4(m)設定值下得到的分類結果...77
圖 4-34 B 區分類結果之分佈型態與個別涵蓋之資料點數...77
圖 4-35 B 區資料點於 Q-space 上的分佈...78
圖 4-36 B 區的側掃聲納影像與分類結果之分佈型態與側掃聲納影像之疊合 ...79
圖 4-37 採樣點 9 所在區域之水下攝影影像 ...80
圖 4-38 採樣點 10 所在區域之水下攝影影像 ...80
圖 4-39 C 區在矩形長寬 4×4(m)設定值下得到的分類結果...81
圖 4-40 C 區分類結果之分佈型態與個別涵蓋之資料點數 ...81
圖 4-41 C 區資料點於 Q-space 上的分佈...82
圖 4-42 C 區的側掃聲納影像與分類結果之分佈型態與側掃聲納影像之疊合 ...83
圖 4-43 採樣點 16 所在區域之水下攝影影像 ...83
XI
表 表
表 表目錄 目錄 目錄 目錄
表 4-1 每個分類群集的變異數 ...56
表 4-2 經過判釋整理後合併得到的結果...57
表 4-3 研究區域底質種類與分佈情形 ...58
表 4-4 A 區在矩形長寬 8×8(m)設定值下得到的各分類群集之變異數...65
表 4-5 B 區在矩形長寬 8×8(m)設定值下得到的各分類群集之變異數 ...67
表 4-6 C 區在矩形長寬 8×8(m)設定值下得到的各分類群集之變異數 ...69
表 4-7 A 區在矩形長寬 4×4(m)設定值下得到的各分類群集之變異數...74
表 4-8 B 區在矩形長寬 4×4(m)設定值下得到的各分類群集之變異數 ...78
表 4-9 C 區在矩形長寬 4×4(m)設定值下得到的各分類群集之變異數 ...82
表 4-10 特定區域底質類別與其海床地貌、生態、地形崎嶇度等特性...84
1
第一章 第一章
第一章 第一章 緒 緒 緒 緒論 論 論 論
1-1 前言 前言 前言 前言
目前要得知海床的底質種類,主要有三種調查方法:
1. 機械採樣法:利用專門的採樣儀器設備來蒐集採樣樣本,如:抓斗式採泥器、
活塞岩心採樣器、箱型岩心採樣器、重力岩心採樣器…等。
2. 光學攝像法:利用光學儀器如水下攝影機、水下照相機,來進行水下攝影或拍 照,以得到海床表面之影像、型態等資訊。
3. 聲學分析法:利用聲納發出的聲波至海床後回傳所接收到的聲學訊號,根據訊 號的強弱以及影像的紋理來辨識底質的種類。
其中,機械採樣法和光學攝像法所花費的時間、金錢和人力都較多,不但調
查速率緩慢,而且只能定點式進行調查,不利於大範圍的海域調查;唯一的優點 是能依照所得到的採樣樣本或彩色影像所顯示的資訊,準確地辨識出底質種類。
聲學分析法則沒有前兩種方法的缺點,其可隨著航線作業,不斷地收取資料,且 探測範圍較廣,能進行線狀或面狀的全面性探測,可在短時間內進行於大範圍的 海域調查,時間上更有效率。
目前對於海床地貌與底質辨識研究所使用的聲學儀器主要為側掃聲納(side- scan sonar),其是利用聲波的回散射能量大小與影像紋理在空間上的分佈型態,來 進行海床地貌與底質辨識的工作。得到聲學資訊後,可以人工判讀聲學影像的方 式,針對聲學影像的灰階深淺程度及紋理型態來進行辨識,也可利用聲學訊號分 析軟體來進行影像資料分群,將具有相同聲學特性的資料歸類為同一群集,由於 不同的底質具有不同的聲學特性,所以具有相同聲學特性的區域可能為同一種底 質,接著再搭配機械採樣法或光學攝像法,配合採樣結果或攝影照片來確認每種 聲學群集之底質類型。
2
1-2 研究動機與目的 研究動機與目的 研究動機與目的 研究動機與目的
目前海洋地質學家多利用聲學分析法來進行海床地貌、底質或人造物的辨
識,其原理為利用聲納打出聲波,至海床表面後反射回來的聲波回散射能量,產 生深淺對比輪廓的聲學影像,藉由分析影像的回散射能量強弱與紋理型態,來得 到海床地貌、底質的資訊,而側掃聲納(side-scan sonar)則是最常用於海床地貌 調查的聲學儀器,不但能展現沿航線高解析度的地貌影像,也可透過併圖(mosaic) 展示大區域的海床地貌資訊。然而,過去對於聲學影像的分析,是藉由分析者對 於不同海床地貌影像的認知,來進行人工的判讀,由於聲學影像並非彩色,而是 不同強度的灰階影像,加上各種底質所對應的灰階強度值沒有一定的標準,必須 倚賴分析者對聲學影像的辨識經驗,因此容易產生誤判,最多只能再配合聲學影 像紋理的判別,利用影像中的陰影區與反射區所呈現的紋理型態來幫助解釋影像 與進行底質分類(圖 1-1)。如此的聲學影像分析方式雖然有效,但較欠缺客觀性。
圖 1-1 側掃聲納影像圖。比較影像中的灰階強度與紋理型態後可以發現此處有兩 種不同的底質存在,一種位於左側,其影像灰階深淺複雜且紋理較不規 則,另一種從左側延伸到右側,呈現出灰階顏色較淺且無特殊紋理的影像。
3
針對聲學分析法的此項缺點,近年來由於電腦科技進步,市面上已經有許多 可用來協助分析聲學影像的軟體出現,比較著名的就是附加在 CARIS 軟體中的 Geocoder,以及 QTC 所研發的相關軟體,如 QTC View、QTC IMPACT 是用來處 理單音束測深機(Single-beam echo sounder)的回散射強度資料;QTC SideView 是用來處理側掃聲納(side-scan sonar)資料;QTC MultiView 則用來處理多音束 測深機(Multi-beam echo sounder)的回散射強度資料。西元 2010 年,QTC 把 SideView 與 MultiView 合併為一套軟體,稱之為 SwathView,也就是本研究所使用 的聲學影像分析工具。這些軟體可以對聲學影像進行量化分析,使其具有客觀性,
此外,國外已有不少研究是利用 QTC 軟體的分析結果來進行底質分類,且在 QTC 軟體研發的過程中,研究人員也將研究的方法發表至期刊上以供檢視,因此這個 方法也具有一定的可信度。
本研究的目的為:將 SwathView 軟體應用在桶盤嶼東側外海海域的側掃聲納 地貌探測資料,並配合地形調查、地質探勘、底質沉積物採樣及水下攝影的結果,
來探討 SwathView 軟體能否準確能否準確地將不同底質類型的海床進行分類,特 別是區分有珊瑚生態的岩石海床與無珊瑚生態的岩石海床,並將分析結果與側掃 聲納影像進行對照,來評估利用側掃聲納影像區分有珊瑚生態的岩石海床與無珊 瑚生態的岩石海床是否可行。
4
1-3 前人研究 前人研究 前人研究 前人研究
本研究區域位於澎湖桶盤嶼東側外海海域,測線範圍向北至風櫃南端,向南
至桶盤嶼東部,為一長約 4 公里、寬約 0.5 公里的矩形區域,總面積約 2 平方公里 (圖 1-2 藍色矩形區域)。關於桶盤嶼近岸海域的相關研究部份,民國 81 年海軍海 洋測量局曾在澎湖群島進行地形及底質之調查,並將成果繪製成海圖,其在桶盤 嶼東部海域所得到的結果如圖 1-2 所示(海軍海洋測量局,1995),此處海域地形深 度介於 0~60 公尺之間,海床的底質種類包括砂質海床(S)、貝類碎屑海床(Sh)以及 岩石海床(R),其中又以岩石海床分佈範圍最廣。此外,交通部觀光局澎湖國家風 景區管理處(2006)也曾針對澎湖地區的海域生態進行調查,其結果顯示,桶盤嶼沿 岸海域的海床上有珊瑚分佈,其覆蓋率從小於 25%到大於 50%都有(圖 1-3),其中 桶盤嶼北側珊瑚的覆蓋率最高,大於 50%,南側的珊瑚覆蓋率最低,小於 25%,
而桶盤嶼東、西兩側之覆蓋率則介於南、北兩側之間。此外,澎湖群島北部海域 的珊瑚由於其造礁作用不高,加上此處海域的侵蝕作用較為強烈,珊瑚的分佈型 態屬於非珊瑚礁式的珊瑚群聚(non-reefal coral communities)(戴,2006、2010;謝,
2008)。
利用側掃聲納影像進行底質分類研究的部份,目前國外已有不少研究是利用 QTC 軟體分析的結果來進行底質分類(Brown and Collier , 2010;Yeung et al., 2008),配合實際採樣的結果,都能有效率的將調查區域的底質種類一一區分出 來。此外,在 QTC 軟體研發的過程中,研究人員也將研究的方法發表至期刊上以 供檢視。台灣地區採用此方法的相關研究極少,只有去年有以 QTC SwathView 軟 體進行台灣-澎湖間海域側掃聲納影像底質分類的論文研究(陳,2011),則對軟體 的操作與使用有較詳盡的說明,其分析結果也與前人在該區域進行底質沉積物採 樣所得到的採樣結果相符。
5
圖 1-2 海軍海洋測量局於桶盤嶼東部海域得到的地形、底質調查結果。圖中的數 值代表該處的水深,小數點後的值以下標表示,英文字母 S 代表砂質海床,
Sh 代表貝類碎屑海床,R 代表岩石海床(海軍海洋測量局,1995)。藍色矩 形框範圍為本研究之研究區域。
圖 1-3 澎湖群島部分海域珊瑚分佈示意圖。
(部分截取自交通部觀光局澎湖國家風景管理處,2005)
6
1-4 論文章節與綱要說明 論文章節與綱要說明 論文章節與綱要說明 論文章節與綱要說明
本論文共分五個章節以說明研究的過程與結果:
第一章:緒論。本章說明研究動機與目的、研究區域概述、前人相關研究及簡述 各章節內容。
第二章:研究方法。本章介紹研究方法、作業項目使用儀器及資料收集處理流程。
第三章:研究結果。本章展示研究區域進行各項調查後所得到的地形、地貌資訊。
第四章:海床生態與地形地貌的關係。本章分為兩部份,主要使用 QTC SwathView 海床分類軟體進行聲學影像資料之處理,4-1 節中進行研究區域的側掃聲 納影像分析,經過資料處理與判釋後,將全區作底質分類;4-2 節中則針 對研究區域中的三個特定區域進行側掃聲納影像分析,並將分析結果做 統整,來進行海床底質種類與地形、地貌、生態關聯性之解釋與說明。
第五章:結論。針對本研究內容提出結論。
7
第二章 第二章 第二章
第二章 研究方法 研究方法 研究方法 研究方法
本研究之研究方法主要分為現場的資料收集與資料的分析處理兩部份,進行 之工作項目包括地形調查、地貌探測、地質調查、底質沉積物採樣及水下攝影。
施測時使用多音束測深系統進行水深之測量,以得到研究區域內的基本地形資 料,並利用側掃聲納系統進行海床地貌及底質分布之探測工作,再利用震測系統 進行反射震測,同時也使用海底抓泥器,於設置之採樣點處進行底質採樣工作,
並利用水下攝影機進行底拖式水下攝影。
以上工作的完成,將可得到完整的表層海床探測資料,清楚呈現出研究區域 內海床上之地形與地貌,並可藉由震測剖面圖得知研究區域海床之沉積物厚度分 布情形,配合底質沉積物採樣得到的樣本與水下攝影所得到之影像,可以證實地 貌探測所得到之海床生態結果。本章將進一步說明本研究各工作項目之資料收集 原理與處理流程。
2-1 地形調查 地形調查 地形調查 地形調查
水底地形作業是集合測深儀在不同位置已知平面座標點位上所測得之水深值
(宋國士等,1996)。本研究使用多音束測深系統(Multibeam Echo Sounding System,
MBS)進行地形調查之工作,其可同時測量多個水深點,可說是集合多個窄束寬的 單音束聲納同時多方向的測量海底的水深值,這些相鄰的水深測值可連結成為一 個扇形測深剖面(swath width),通常這個剖面與船行進的方向垂直,而在施測時沿 著航線下方形成一條與航線平行之帶狀測面(swath)(圖 2-1),此帶狀測面之大小視 多音束測深機的音束數量和束寬而定(陳,2002),音束數量越多,束寬越寬,帶狀 測面也越寬,資料收集的效率也較高。
測線規劃方面,於探測區域內共設置 5 條測線,每條測線間距為 100 公尺,
8
總長度約為 20 公里(圖 2-2)。施測期間採用 SVP 聲速儀進行聲速校正,並就近設 置潮位站,作為潮位修正之用。
圖 2-1 多音束測深示意圖。測深機向下發射的音束形成扇形剖面(swath width),
沿著航線下方形成帶狀測面(swath)(引自高,2008)。
圖 2-2 風櫃至桶盤間海域多音束測深機測線規劃圖。藍線框起之範圍為探測區 域,探測區域內之紅線為規劃之測線,共有 5 條測線,測線間距為 100 公尺,總長度約為 20 公里。(底圖摘自 Google Earth)
9
2-1-1 使用儀器介紹 使用儀器介紹 使用儀器介紹 使用儀器介紹
為了提高海底地形資料取得之準確度及作業效率,使用多音束測深系統已成 為近岸測深的趨勢(宋國士等,1998)。多音束測深系統主要可分為四個部份,分別 是測深單元、定位單元、船體姿態單元以及整合收集單元(圖 2-3)(高,2008)。
1. 測深單元:本研究所使用的是美國 L3 communication 公司旗下的 SeaBeam 1180 型測深機(圖 2-4),共有 126 個音束,扇狀測面最大角度可達 153 度,可測深度 達 600 公尺,其束寬和水深成反比(圖 2-5),音鼓頻率為 180kHz。
2. 定位單元:使用全球衛星定位系統(Global Position System,GPS),利用 GPS 衛 星提供導航、測量及追蹤物體準確的瞬間座標位置。本研究所使用的是美國 Ashtech 公司所生產的 Z-Xtreme 型及 Thales 公司所生產的 Z-MAX 型 L1/L2 雙 頻 GPS(圖 2-6)做為船上的即時動態衛星接收儀,可同時接收美國 GPS 衛星及 蘇聯 GLONASS 衛星。為了求得更佳的定位精度,水深值的定位採用相對定位 方法之後差分處理方式來進行修正,使其定位精度可達到公尺級。
3. 船體姿態單元:當船在海面上航行時,會受到風與波浪的影響而造成船體在不 同方向上的晃動(圖 2-7),因此必須設置船體運動感應器(motion sensor)及電羅 經(gyrocompass)來量測船隻在施測期間的運動狀態,配合衛星定位資料,進而 推算測深剖面每一個水深資料點的座標。本研究使用英國 TSS 公司所出產的 DMS2-05 型船體運動感測器(圖 2-8),來測量船體在施測期間的運動狀態,包括 橫向搖晃(roll)、縱向搖晃(pitch)和上下起伏(heave),其精確度可達±0.05 度。電 羅經的部份,使用的是為英國 TSS 公司所出產之 SG BROWN Meridian Surveyor 電羅經(圖 2-9),來記錄船首在施測期間的方位(Yaw)。
10
4. 系統整合單元:測深單元、定位單元、船體姿態單元各自運算處理後,透過序 列埠將各參數資料輸入電腦內儲存,並利用 Hypack 公司所生產的 Hypack 軟體 進行後處理作業。
圖 2-3 多音束測深系統結構組織圖。
圖 2-4 SeaBeam 1180 型多音束測深機。左為測深機之主機,右為測深機音鼓。
11
圖 2-5 SEABEAM1180 型多音束測深機的音束涵蓋圖。於不同的深度下扇狀測面 之有效角度不同,水深越深有效角度越窄,此為規劃航線時之重要依據。
(引自 L3 communications 公司產品說明文件)
圖 2-6 Ashtech 公司所生產的 Z-Xtreme 型(左圖)及 Thales 公司所生產的 Z-MAX 型(右圖)衛星接收儀。
12
圖 2-7 船體姿態擺動示意圖。船在航行時於 X、Y、Z 軸上分別會產生 Pitch、Roll 及 Yaw 角度的搖晃,必須經過修正才能得到準確的水深值。(引自謝,2006)
圖 2-8 TSS 公司所出產的 DMS2-05 圖 2-9 TSS 公司所出產之 SG BROWN 型船體運動感測器。 Meridian Surveyor 電羅經。
13
2-1-2 資料處理 資料處理 資料處理 資料處理
從野外取回之多音束測深資料,只是初步的原始資料,有多項參數和誤差尚 未修正,無法直接成為出圖的資料,必須進行以下的後續處理步驟,方能得到準 確的水下地形資料。(謝,2006)
1. 定位資料差分置換
全球衛星定位系統發展初期,美國軍方為避免此高精度的定位方式被有心 人士作不當的利用,對國家安全造成威脅,因此在衛星傳送碼中加入了選擇式 供應 (Selecice Availability,SA) 干擾,使非授權使用者在非即時情況下使用 GPS 定位,影響了定位的品質,於是發展出「差分置換」的處理方式,其原理 為將施測的船上所架設之 GPS 視為動站,作為導航及定位之用,而岸上一已知 座標點處所架設之 GPS 則視為基站,動站與基站盡量使用相同的衛星群,由於 基站的座標點固定,基站所量測到隨著時間在 X 軸、Y 軸和 Z 軸之改變量可做 為動站的修正量,如此就能提高定位的精度。西元 2000 年美國停止 SA 干擾,
使得單機的定位精度大幅增加,加上使用差分置換,可得到最精確的定位值。
2. 聲速及潮位修正
由於多音束測深機是同時以不同角度發射音束及接收訊號,外側音束和中 央音束的傳播距離也不相同,且不同深度的水層因溫度、鹽度不同造成密度上 的差異,水體折射影響會使外側音束所測得之水深值偏差加大。因此,為了修 正外側音束的測深值,必須利用溫鹽深儀(CTD)量測各水層之聲速(圖 2-10),來 修正各音束實際量測到之水深值。
此外,潮汐作用也會使量測的水深值產生些微的差距,因此必須進行潮位 修正,將測量的水深值修正回量測值中(圖 2-11)。
14
3. 整合儀器架設之幾何參數
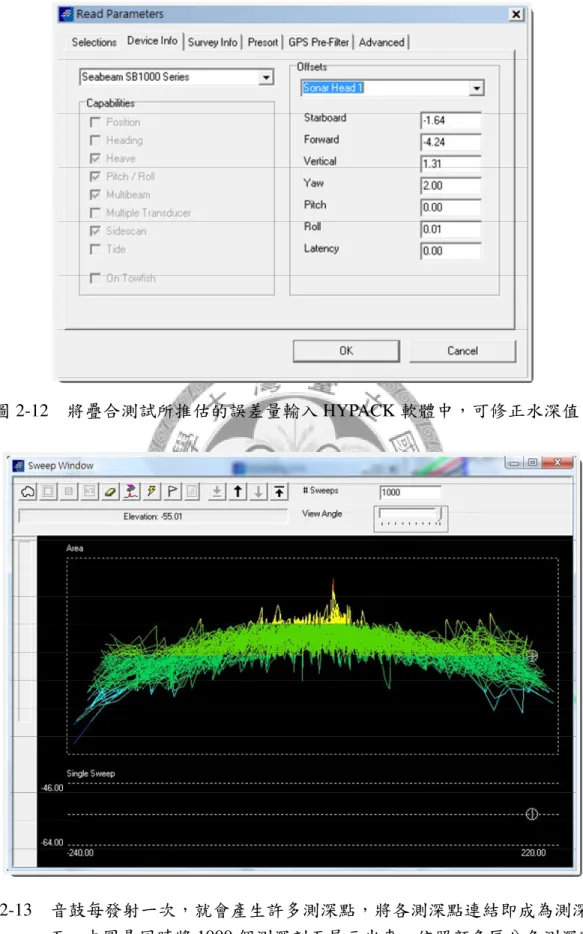
施測使用到之儀器包括多音束測深機之音鼓、船體運動感測器、電羅經和 GPS 天線,於施測前會將上述儀器和船體重心的相對位置記錄下來。此外,進 行資料處理時,必須將疊合測試所得到之音鼓架設時產生之誤差量輸入至 HYPACK 軟體中(圖 2-12),並連同聲速修正和潮位修正做整合,
4. 人工資料檢視判別
經過各項參數修正後,利用 HYPACK 軟體檢視水深剖面測點(圖 2-13),以 人工判別,將可能因環境或儀器因素所產生之不合理的水深值去除。
5. 出圖
將修正完成之水深點資料輸出,根據製圖需求進行座標轉換,並將資料網 格化,以供繪製地形圖之用。
圖 2-10 由溫鹽深儀所量測到的聲速 圖 2-11 桶盤潮位站所量測到之潮位值。
剖面。
15
圖 2-12 將疊合測試所推估的誤差量輸入 HYPACK 軟體中,可修正水深值。
圖 2-13 音鼓每發射一次,就會產生許多測深點,將各測深點連結即成為測深剖 面。本圖是同時將 1000 個測深剖面展示出來,依照顏色區分各測深點之 深度,可明顯看出外側音束受能量衰減和水層折射的影響而顯得凌亂。
16
2-2 地貌探測 地貌探測 地貌探測 地貌探測
海洋學家常依據所獲得之水下圖樣影像,來進行海床地貌之判讀。自二次大
戰以來,兩種基本的影像系統便不斷地被應用於水下地貌之測繪上,其一為聲學 (acoustic)影像系統,另一為光學(optical)影像系統(林,2001)。本研究進行地貌探 測資料之收集是使用聲學的側掃聲納系統(Sidescan Sonar System,SSS),其於施測 時會在船後方拖行拖魚(towfish),拖魚左右舷各有一線性音鼓陣列發射出扇形波 (圖 2-14),除了有涵蓋大範圍面積地域、高效率及可準確定出經緯度座標的優點 外,並可以斜視海床的方式獲得微細地形起伏之資訊。
側掃聲納是一套可辨識水下地貌的高解析度主動式聲納系統,其主要原理為 利用音鼓於拖魚左右舷向兩側發射高頻之扇形聲波,當此扇形聲波在水中傳遞觸 碰到底床或其上之特殊目標物後,就會發生回散射(backscatter)現象(圖 2-15),這些 由反射及散射回來之不同強度大小的回收訊號經接收器接收、比對並進行幾何空 間位置配對後,便以灰階圖素(pixel)的方式展式其聲學影像,側掃聲納發射聲波的 頻率越高,系統對底質的解析度越高,呈現出的聲學影像圖解析度也越佳。
側掃聲納對於旁側的指向性強,主要的聲波強度在音鼓的中央部份(圖 2-16),
利用這樣的聲波特性,來發展斜視低角度的掃描方法,可以獲得較佳的微細地形 起伏訊號,並且將單側的線狀陣列音鼓發展為雙側,可全域性掃描海床,增加側 掃聲納在海床上的解析能力與掃描範圍( Fish and Carr,1990;劉,2007)。
由於側掃聲納發射的聲波會受底質的軟硬程度、粗糙度、顆粒大小及地形高 低影響而產生不同強弱程度的回散射訊號,接收到之回散射訊號越強,於聲學影 像圖上所呈現之灰階顏色越深,反之則越淺,未接收到回散射訊號則呈現白色之 陰影(shadow),因此,藉由側掃聲納灰階圖素影像特徵可判讀出底床形貌,並可量
17
測出底床上細微的地貌景致與特殊目標物。本研究在測線規劃方面,於探測區域 內共設置 5 條測線,每條測線間距為 100 公尺,總長度約為 20 公里(圖 2-17)。
圖 2-14 側掃聲納作業示意圖。圖中可見拖魚被拖行於船的後方,並向海床發射 高頻率的扇形聲波。
圖 2-15 側掃聲納示意圖。發射出去的聲波會散射或反射不同能量大小的訊號,
折回接收器的訊號越強,於聲學影像圖上所呈現之灰階顏色越深,反之 則越淺。(引自林,2001)
18
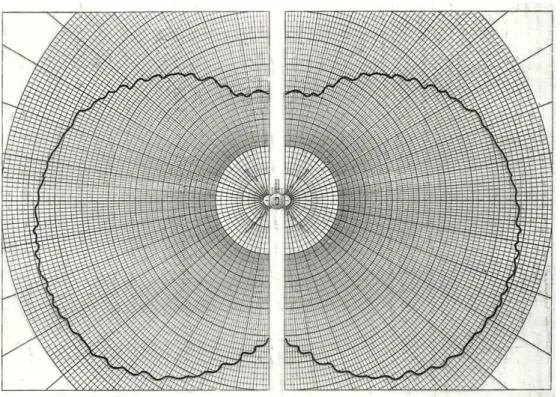
圖 2-16 側掃聲納聲波強度與角度關係圖。由扇形波由拖魚行進方向的投影,可 發現聲波強度隨角度而改變。(引自 Fish and Carr,1990)
圖 2-17 風櫃至桶盤間海域側掃聲納測線規劃圖。藍線框起之範圍為探測區 域,探測區域內之紅線為規劃之測線,共有 5 條測線,測線間距為 100 公尺,總長度約為 20 公里。(底圖摘自 Google Earth)
19
2-2-1 使用儀器介紹 使用儀器介紹 使用儀器介紹 使用儀器介紹
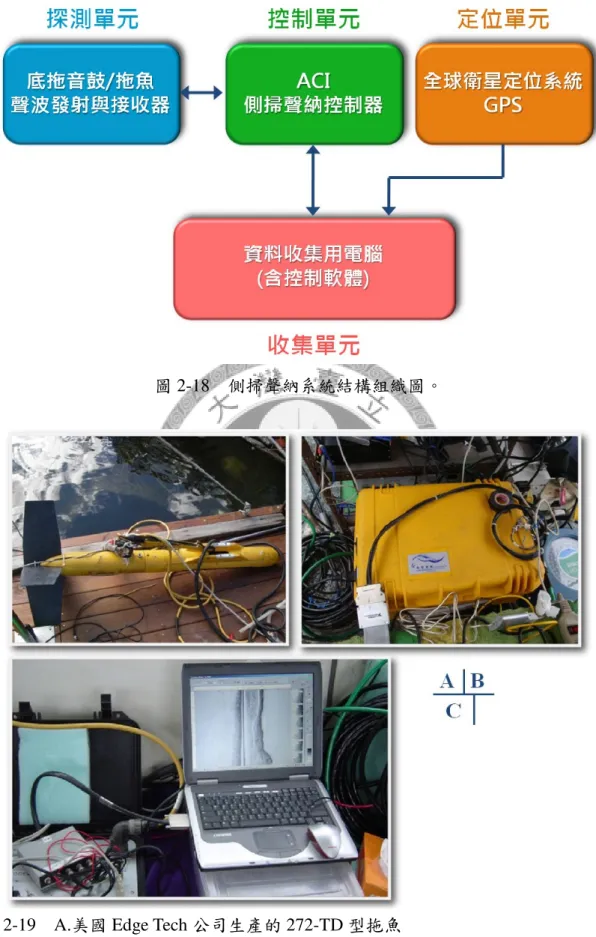
側掃聲納系統主要由四個部份所構成,分別是定位單元、探測單元、控制單 元以及收集單元(圖 2-18)。
1. 定位單元:使用全球衛星定位系統來做精準的導航與定位。
2. 探測單元:即底拖音鼓,也就是拖魚(towfish),包含聲波發射器(projector)與接 收器(hydrophone),當控制單元將觸發訊號藉由電纜傳遞到拖魚發射聲波,並由 接收器開始接收訊號,並傳遞到控制單元於電腦上記錄
3. 控制單元:為拖魚與電腦之間的硬體介面,提供將電腦數位訊號轉換為控制訊 號來設定拖魚測距、強度、以及電源供應,並接收拖魚的回散射訊號,傳遞至 收集資料用電腦記錄。
4. 收集單元:包含資料收集用電腦與控制軟體,可提供聲納回散射訊號的數化與 記錄,並接收定位資料,藉由控制軟體來設定發射訊號強度與測距設定,並於 收集資料的過程中監看訊號狀態作為品管(Klein,1985;劉,2007)。
本研究所使用的拖魚為美國 Edge Tech 公司生產的 272-TD 型底拖式拖魚(圖 2-19A),其包含了訊號發射器與接收器,可提供雙頻(100kHz、500kHz)、1.2°水平 音束寬(horizontal beam width)、傾斜水平 20 度、50 度垂直音束寬(vertical beam width) 的扇形波束,其射距(range)可達 600 公尺,雙頻的優點則可在射距與解析度之間取 得協調,本研究則使用頻率 100kHz 來進行地貌之探測。此外,利用 ACI 側掃聲納 控制器(圖 2-19B)來控制放置在水中的拖魚,藉由電纜將類比訊號經類比/數位卡 (A/D Card)將訊號資料數位化,並將數位化的資料透過 OceanStar Syatem 公司所開 發設計的 SeaSone Hunter 軟體處理並送至電腦硬碟中儲存(圖 2-19C),以供後續資 料處理與繪圖。每一個收集到的訊號會以訊號的強弱切割成 192,000 個圖素,以提 高影像之解析度與出圖品質。
20
圖 2-18 側掃聲納系統結構組織圖。
圖 2-19 A.美國 Edge Tech 公司生產的 272-TD 型拖魚 B.用來控制拖魚的 ACI 側掃聲納控制器。
C.收集資料用電腦及 SeaSone Hunter 軟體的展示畫面。
21
2-2-2 資料處理 資料處理 資料處理 資料處理
收集到的側掃聲納影像資料,必須經過修正處理,才能使圖素為 1:1 之比例(正 方形圖素)、具有正確的振幅值以及放置在正確的位置(林,2001;Johnson and Helferty,1990)。本研究利用 OceanStar Syatem 公司所開發設計的 SeaSone Hunter 與 Mapper 軟體,來進行側掃聲納資料後處理與併圖(mosaic),其重要後處理項目 如下:
1. 時域變化增益修正(Time-Varying Gain,TVG)
聲波傳遞於海中,其能量會被吸收或散射,而隨時間衰減,即儀器所接收 到之訊號強度隨著傳遞距離增加而衰減,因此必須進行時域變化增益修正,藉 由適當的調整增益來補償聲波能量的損失,以提高聲學影像的辨識度。
2. 斜距修正(Slant Range Correction)
側掃聲納收錄資料的過程中,會根據時間序列及設定的聲速將收錄時間換 算為距離來記錄,此距離為音鼓至海床的直線距離,由於相對水平海床而言有 一個夾角,所以稱為斜距(slant range)。假設海水為均值狀態,而海床為水平狀 態,可藉由斜距與拖魚高度來推算目標物的平面距離,稱為斜距修正(圖 2-20) (Klein,1985)。經過斜距修正的影像才能得到其大地座標位置。
3. 後拖長度修正(Layback Correction)
良好的側掃聲納施測多以底拖方式進行,然而現場定位是以船上衛星天線 為定位點,進行側掃聲納影像併圖時會造成影像在幾何空間分布上有位移的情 形,因此必須根據拖魚纜線施放的長度、纜線下放至水中的夾角及施放點與衛 星天線之相對位置來進行後拖長度修正。近年來對於拖魚在水下的定位發展出 超短基線定位法(ultrashort baseline method),進而提升了定位的品質(高,2008)。
22
完成以上之後處理修正步驟後,就可進行併圖的動作,本研究併圖時使用的 是 OceanStar Syatem 公司所開發設計的 SeaSone Mapper 軟體,來執行併圖與出圖 之作業。
圖 2-20
側掃聲納收錄示意圖。
上圖為實際的海床地形,拖魚射出紙面,數字 1~5 為收錄的順序,紅色 圓圈處為凸起之海床。由於側掃聲納時間序列上與實際地形不同,造成 時間序列上的排序與實際情形有所差異,中間的圖為依據時間序列所接 收到的訊號,下圖為經過斜距修正後的訊號。此外,受到地形影響,凸 起海床聲學訊號(深色區塊)後方會產生無訊號之陰影帶(白色區塊)。
23
2-3 底質沉積物採樣 底質沉積物採樣 底質沉積物採樣 底質沉積物採樣
為了得到詳細而完整的海床底質分布資料,進行底質沉積物採樣工作實有其 必要性。本研究使用自製之海底抓泥器進行底質沉積物採樣,在測線規劃方面,
基於效率與便利性之考量,本研究於探測區域內設置一條沉積物採樣路徑,以 250 公尺為採樣間距,在路徑上訂定 17 處採樣點,並以登陸點(風櫃陸岸)為起點進行 採樣點編號,其中編號 1、17 之採樣點位置分別位於風櫃、桶盤之陸岸上,其餘 15 處採樣點則位於探測區域之海床上(圖 2-21)。採樣所得到的樣本,可以證實地 貌探測所得到之海床生態結果。
2-3-1 使用儀器介紹 使用儀器介紹 使用儀器介紹 使用儀器介紹
本研究進行底質沉積物採樣工作使用之儀器為抓斗式採泥器(圖 2-22),配合用 以放置沉積物樣本的容器與置物袋,來進行底質沉積物採樣作業。此外,進行沉 積物樣本分裝之人員必須配戴手套,以免汙染樣本。
2-3-2 現場作業流程 現場作業流程 現場作業流程 現場作業流程
1. 根據目的性訂定施測區域,並規畫採樣路徑、採樣點位置與數量。
2. 收集氣象與海象資料,決定進行作業之日期。
3. 當船行進到所設置的採樣點位置時,將採泥器用繩索綁好後,慢慢放入水中進 行採樣,採樣完成後再將採泥器拉上來,將採泥器採得之樣本置放於大型容器 內,並分放至標有該處採樣點編號的乾淨置物袋中(圖 2-23)。
4. 將所有沉積物樣本儲放於乾淨之大型儲物箱中,以供日後進行對照之用。
24
圖 2-21 風櫃至桶盤間海域底質沉積物採樣路徑規劃圖。藍線框起之範圍為探測 區域,探測區域內之紅線為規劃之採樣路徑,黃色圓圈圈選處為採樣點,
以登陸點(風櫃陸岸)為起點,250 公尺為採樣間距,共 17 個採樣點,其中 採樣點 1 和 17 分別位於風櫃、桶盤之陸岸上,其餘 15 處採樣點則位於 探測區域之海床上。(底圖取自 Google Earth)
圖 2-22 進行底質沉積物採樣使用的抓斗式採泥器。
25
圖 2-23 當船行進到所設置的採樣點位置時,將採泥器用繩索綁好後,慢慢放入 水中進行採樣,採樣完成後再將採泥器拉上來,將採泥器採得之樣本置 放於大型容器內,並分放至標有該處採樣點編號的乾淨置物袋中。
26
2-4 水下攝影 水下攝影 水下攝影 水下攝影
可應用於海床地貌之測繪和判讀的兩種影像系統,其一為聲學(acoustic)影像 系統,另一為光學(optical)影像系統。本研究在研究區域地貌資料收集的過程以使 聲學的側掃聲納系統為主,先進行大區域的掃描探測,再以光學的水下攝影為輔,
針對特定區域進行拍攝工作。本研究所使用的光學設備為底拖式水下攝影機,其 原理和一般陸地上所使用的攝影機並無差異,但必須克服隨水深增加而增強的水 壓所造成的滲水現象,因此在水密上的要求是水下攝影機最重要的關鍵(顏,2004)。
測線規劃方面,配合採樣點位置,於探測區域內設置一條水下攝影路徑,由 船體拖行水下攝影機,於採樣點處以距離海床約 1~2 公尺之深度,進行海床生態 之拍攝工作(圖 2-24),每處採樣點之水下攝影拍攝時間長度約為 1 分 30 秒。
圖 2-24 風櫃至桶盤間海域之水下攝影路徑規劃圖。藍線框起之範圍為探測區域,
探測區域內之紅線為拍攝路徑,黃色圓圈圈選處為採樣點,於採樣點處 距離海床約 1~2 公尺之深度,進行海床生態拍攝。(底圖取自 Google Earth)
27
2-4-1 使用儀器介紹 使用儀器介紹 使用儀器介紹 使用儀器介紹
本研究使用的底拖式水下攝影儀器為 Kongsberg Simrad Osprey 1366 MK-II color zoom camera 與 1236 camera control unit,配合顯示器與纜繩,來進行底拖式 水下攝影工作(圖 2-25),其進行方式為由船體拖行底拖式水下攝影機,並使用人力 拉放纜繩長度的方式來控制攝影機與海床的距離。
2-4-2 現場作業流程 現場作業流程 現場作業流程 現場作業流程
1. 根據目的性訂定施測區域,並根據採樣點位置規劃水下攝影施放位置和拍攝時 間長度。
2. 收集氣象與海象資料,決定進行作業之日期。
3. 進行底拖式水下攝影時,將水下攝影機架好後與纜繩相接,慢慢放入水中,同 時開啟水下攝影機的控制器,就可以在船上進行水下攝影機的操作,包括調整 攝影機的鏡頭焦距遠近、調整攝影機照射光的強度,或是調整鏡頭拍攝的方向。
由於拍攝到的影像會即時顯示在顯示器畫面中,因此可藉由監看顯示器畫面來 進行攝影動作之調整,以得到良好的水下攝影影像(圖 2-26)。
4. 拍攝完成後,將水下攝影機收起,並將拍攝得到的影像檔案存放於電腦中,以 供日後進行對照之用。
28
圖 2-25 A. Kongsberg Simrad Osprey 1366 MK-II color zoom 水下攝影機。.
B. 1236 camera control unit 水下攝影控制器。
C.底拖式水下攝影使用之器材,包括水下攝影機、控制器、顯示器與纜繩。
圖 2-26 進行底拖式水下攝影時,將水下攝影機架好後與纜線相接,慢慢放入水 中,同時開啟水下攝影機的控制器,就可以在船上進行水下攝影機的操 作,拍攝到的影像會即時顯示在顯示器畫面中。
29
2-5 地質調查 地質調查 地質調查 地質調查
震測系統的原理主要是人工震源產生之震波訊號經由水下發射器發射,傳遞
過水層後直接進入到海床下的地層中,當震波遇到不同阻抗(impedance)的介質 界面時,一部份的震波會反射回去形成反射波。由於震波在傳遞過程中其路徑、
振幅、波形及頻率會受地層的岩性、結構及厚度所影響,這可作為震測資料解釋 的依據。
震源所產生的能量大小及頻率決定了其對地層的穿透力及解析力,通常能量 愈大而頻率愈低的震源,對地層有較高的穿透力;而能量小且頻率高的震源則具 有較高的解析力。
圖 2-27 變頻式淺層震測剖面系統(Chirp)作業示意圖。震波以波動形式傳播出去,
遇到不同阻抗的介質界面時,部份震波會反射回去,形成反射波。
30
2-5-1 使用儀器介紹 使用儀器介紹 使用儀器介紹 使用儀器介紹
變頻聲納是利用一個寬頻率的變幅、變頻聲源,以連續發射聲波的形式在水 層中與淺層地層內傳遞,在傳遞的過程中,如果遇見不同密度的介質層,則會發 生反射現象,此反射訊號會折回並由接收器內紀錄,藉由接收主機連續接受,經 過訊號強度與波形的檢核工作來增加訊號的辨識率,剔除雜訊,以獲得高解析的 震測剖面訊號,用以對比相異密度地層或目標物。
本研究所使用之震測系統為美國 EdgeTech 公司製造的 X-star 數位變頻震測儀 (簡稱 Chirp),拖魚型號為 Edgetech SB-216S(圖 2-28),其發射之震波脈衝範圍有 2~16、2~12、2~10kHz 三種,其在泥層可達 80 公尺的穿透力及 6 公分的解析度,
但在含砂的地層中其穿透力較差,通常在 10 公尺左右。由於發射器在波浪運動影 響下會造成解迴旋解不良而失去其對地層的解析力,因此作業上多採用底拖的方 式進行。發射的震波訊號經過接收後,至 X-Star 資料收集處理系統(圖 2-28)中以 SEG-Y 格式儲存在硬碟裡。在測量的同時,反射的訊號會依序排列顯示在顯示器 螢幕上,形成反射震測剖面,供操作者監看測量情形。
圖 2-28
EdgeTech SB-216S 拖魚(左圖)及 X-Star 資料收集處理系統(右圖)。
31
2-5-2 資料處理 資料處理 資料處理 資料處理
從現場收集震測資料必需經過下列資料處理步驟,才可獲得地層訊號之意義:
1. 資料轉換:為了增加處理效率,將磁帶內的資料,利用程式於工作站內逐次 並逐檔的每個震測測點資料轉換於硬碟內,並利用網路將轉換完成的 SEGY 震測資料格式傳到到其他工作電腦。
2. 剖面資料處理:包含定位資料較正、影像強度增益、資料展示、泥層厚度辨 識、以及目標物標示等。
3. 繪圖:將剖面資料依據其空間位置與航跡的分布,逐條以固定方向將震測剖 面展示,並標訂說明該疑似目標物的位置繪製成平面與剖面圖。
32
第三章 第三章 第三章
第三章 研究結果 研究結果 研究結果 研究結果
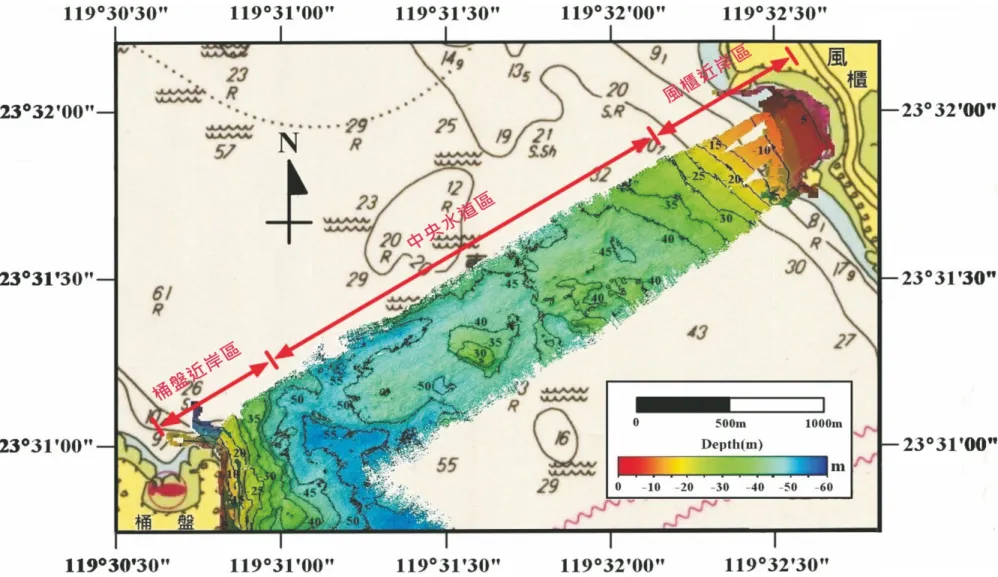
本研究區域位於桶盤嶼東側外海海域,測線範圍向北至風櫃南端,向南至桶 盤嶼東部,為一長約 4 公里、寬約 0.5 公里的長方形區域,總面積約 2 平方公里(圖 3-1),由地形圖可知,研究區域地形深度變化介於 0~-60m 之間,平均深度約-30m,
依照地形特性可將其分成三區,分別是最北端的風櫃近岸區、中間的中央水道區 以及最南端的桶盤近岸區。此外,從圖 3-2 的地形剖面可以發現,整個研究區域的 地形變化是由風櫃南端往西南方深度逐漸加深,其中風櫃近岸區的深度最淺,坡 度也最緩,為由陸源沉積物覆蓋的海床邊界,其平均坡度約 2°,此處的海床平坦 而光滑,沒有特殊的地形目標物。往西南進入中央水道區,海床表面變得較為崎 嶇,深度也繼續加深,到了接近桶盤嶼近岸的區域,大部份範圍的海床深度介於 -50m~-60m 之間,為整個研究區域中深度最深之處,而在地形特徵方面,有兩個 火成高區和三個凹槽地形分佈於此,由三維地形圖可以看得更清楚(圖 3-3)。至桶 盤近岸區時深度則從-50m 向上急遽變淺,形成一個陡坡,其坡度約為 8°,並有平 台與高區在此分佈(圖 3-3)。以下將依地形分區進行各區域的地形、地貌與底質沉 積物分佈之解釋與說明。
33
圖 3-1 研究區域海底地形圖。等深線間距為 5 公尺,深度值參見圖右下方的色柱。(底圖引自海軍海洋測量局,1995)
34
圖 3-2 研究區域地形剖面圖。一些地形特徵標示在上圖的剖面上。
圖 3-3 研究區域 3D 地形圖。一些地形特徵標示在圖上。
A A A A
A A A A’
’’’’
sssslope=lope=lope=lope=1.51.51.51.5°°°°
slope=8 slope=8slope=8 slope=8°°°°
高區 1
高區 2 凹槽
3
平台
高區 3
火成高區 凹槽
-35m
-30m
-40m
-35m
-58m
凹槽
2
凹槽1
-55m -55m
sssslope=lope=lope=lope=2.82.82.8°°°° 2.8
35
3-1 風櫃近岸區 風櫃近岸區 風櫃近岸區 風櫃近岸區
此區位於研究區域北端,涵蓋了從風櫃南側海岸往西南方延伸至水深 30 公尺 處的範圍(圖 3-4),由地形圖和地形剖面圖可知,此區從風櫃南側海岸以均勻且平 緩的趨勢向西南逐漸加深,等深線與海岸線幾近平行,地形變化較小,其中水深 0~15 公尺的範圍坡度最緩,約為 1.5 度,而水深 20~30 公尺處的範圍坡度約 2.8 度,整區平均坡度約 2 度。由震測剖面可以發現,此區海床上的沉積物覆蓋量較 多,尤以水深 15 公尺內的範圍沉積物堆積較厚,其厚度可達 5 公尺,超過 15 公 尺後沉積物的厚度則越來越薄,顯示此區為陸源沉積物之覆蓋區(圖 3-5),且由於 沉積物的堆積,使得此區的海床表面非常平坦光滑,沒有特別顯著的地形目標物。
圖3-4 風櫃近岸區海底地形圖。此區水深介於0~30公尺之間,等深線間距為2公尺。
圖3-5 風櫃近岸區震測剖面圖,紅色箭頭所指為岩床位置。
36
地貌方面,可以發現此區的側掃聲納影像呈現灰白色的影像(圖 3-6),顯示此 處聲波經海床反射或散射回來的訊號非常微弱,也沒有明顯的色階對比或組成,
呈現出軟底質海床所具有的地貌特徵,推測此處的海床為細顆粒的軟底質海床,
且海床表面的沉積物分佈非常均勻,呈現出的影像非常一致且乾淨,表示此處海 床上覆蓋了大量的現生沉積物,由採集到的沉積物樣本可知此區的表層沉積物多 為細砂(圖 3-7),為砂質海床。此外,有少數呈現深灰色的、紋理較複雜的影像零 星分佈於此(圖 3-6),這些深色區塊可能是該處海床表面有粗糙的岩盤出露所致。
圖3-6 側掃聲納影像圖,呈現弱回散射強度的灰白色影像。
圖3-7 在風櫃近岸區水深20公尺處採集到的表層沉積物,照片中田字形方格長寬 各2公分,上面的編號為採樣點編號。此沉積物樣本為細砂顆粒大小。
37
3-2 桶盤近岸區 桶盤近岸區 桶盤近岸區 桶盤近岸區
此區位於研究區域南端,由桶盤嶼東側向外延伸500公尺內之範圍,水深介於 0~50公尺之間(圖3-8)。由地形圖可知,此處地勢變化較大,水深從50公尺開始向 上急遽變淺,平均坡度約為8°,較風櫃近岸的地形坡度要陡了許多,為整個研究 區域坡度變化最大的地方。此區的海床以硬底質的玄武岩基盤為主。由震測剖面 可以發現,此處的海床表面上有許多雙曲線痕跡,其為聲波接觸海床上的崎嶇地 形時所產生的繞射現象,表示此處的海床上幾乎沒有表層沉積物覆蓋,多為礁石 岩盤出露,海床表面地形較崎嶇(圖3-9)。此區有一些由火成噴發所形成的地形特 徵,其中有一個高區(高區3)其中心位於北緯23°30’47”、東經119°31’02”處,直徑 約200m,深度為-35m,比週遭海床高了約5m,且朝桶盤陸岸面坡度較陡,背向桶 盤面坡度則較緩;還有一個平台位於北緯23°30’07”、東經119°30’56”處,其面積約 31,400m2,深度約-40m,平台外圍則有一因地形高度落差所產生的線性陡坡,坡 度約11度,其沿著桶盤嶼近岸與等深線走向大致平行。
圖3-8 桶盤近岸區海底地形圖。此區水深介於0~50公尺之間,等深線間距2公尺。
38
圖3-9 桶盤近岸區震測剖面圖。海床表面上有許多雙曲線痕跡。
地貌方面,從圖 3-10、3-11 的側掃聲納影像上可以發現,此區的側掃聲納影 像顏色大多為深灰色至黑色,色階對比非常明顯,影像的紋理也非常複雜,顯示 此處之海床所接收到的回散射訊號非常強,呈現出硬底質的岩石海床所具有的地 貌特徵。從影像中可以看到有許多線性的地形線分佈在此區,其走向幾乎與等深 線的走向一致,且在影像上可以明顯地看到岩盤的節理面,顯示此處為硬底質的 玄武岩質海床,且海床上幾乎沒有沉積物覆蓋,沉積物含量相當少。此外,從側 掃聲納影像上也可以看到有許多黑色斑點紋理廣泛分佈在出露的岩盤上,這些斑 點的直徑約在 1m 內,推測其可能為聲波打到生長在岩石海床上的群聚型珊瑚,經 過反射及散射後所接收到的影像。
A
A
B
B C
C
39
圖 3-10 側掃聲納影像圖,虛線以左為桶盤近岸區範圍,有許多線性地形線分佈。
圖 3-11 側掃聲納影像圖,有許多珊瑚所產生的斑點狀紋理分佈在礁石上。
中 中中 中 央 央央 央 水水水 水 道 道道 道 區 區區 區 桶桶
桶桶 桶 桶桶 桶 盤 盤 盤 盤盤 盤盤 盤 近近 近近 近 近近 近 岸 岸 岸 岸岸 岸岸 岸 區 區 區 區區 區區 區
中央水中央水中央水 中央水 道 道道 道區區區 區 桶桶
桶桶 桶 桶 桶 桶 盤 盤 盤 盤盤 盤 盤 盤 近近 近近 近近 近近 岸 岸 岸 岸岸 岸 岸 岸 區 區 區 區區 區 區 區
40
3-3 中央水道區 中央水道區 中央水道區 中央水道區
此區位於研究區域中間,接續北端的風櫃近岸區往西南方延伸,整體水深介 於30~60公尺之間(圖3-12)。由於此區的海床為火成噴發形成的岩床,且從震測剖 面可以發現,此區的海床表面上有許多礁石造成的雙曲線痕跡(圖3-13),其為聲波 接觸海床上的崎嶇地形時所產生的繞射現象,顯示此處海床上的表層沉積物較 少,多為礁石岩盤出露,地勢較崎嶇,因此從地形圖可以看到許多火成噴發所形 成的地形特徵分佈於此,像是在北緯23°31’30”、東經119°31’54”處,有一個火成高 區(高區1),其形態呈放射狀分佈,面積約70,650m2,深度約-35m,比週遭海床高 了10m左右;另一個高區(高區2)位於北緯23°31’15”、東經119°31’37”處,型態如同 一座小丘,面積約60,000m2,深度為-30m,比週遭的海床高了約15m,且朝風櫃面 坡度較緩,朝桶盤面坡度則較陡。
此外,從圖3-12也可以發現有一些凹槽地形分佈於此,其中一個位於北緯 23°31’19”、東經119°31’21”處,為呈東北-西南走向的橢圓形凹槽(凹槽1),其面積 約15,000m2,深度約-55m,與週遭海床的深度落差約5m;而在北緯23°31’15”、東 經119°31’12”處,則有一個圓形凹槽(凹槽2),其面積約10,000m2,深度約-55m,與 週遭海床的深度落差約5公尺;在此區最南端,銜接桶盤近岸區的地方,還有一個 大型的線性凹槽(凹槽3)位於北緯23°31’02”、東經119°31’08”處,其型態大致成ㄑ 形,呈東-西走向與東南-西北走向分佈,面積約115,000m2,深度約-58m,為整個 研究區域深度最深的地方,其與週遭海床的深度落差約8公尺,輪廓相當地不平 整。由此線性凹槽(凹槽3)的走向分佈可以發現,其走向與當地海流的切割並不相 關,推測其可能是受火成噴發的影響所致。
綜合上述中央水道區之地形特徵說明,可以發現此區的地形高區多分佈在此 區北側,而凹槽地形則分佈於此區的南側,推測造成此種情形的原因,可能是此 區海床兩側的火成活動造成海床斷裂,而在此區形成北高南低的地勢。
41
圖3-12 中央水道區海底地形圖。此區水深介於30~60公尺之間,等深線間距2公尺。
圖3-13 中央水道區震測剖面圖。海床表面上有許多雙曲線痕跡。
a a
a
42
地貌方面,從風櫃外海、水深 30 公尺處向西南方延伸,可以發現側掃聲納的 影像從灰白色轉變為稍深的灰色至深灰色(圖 3-14),顯示中央水道區所接收到的回 散射訊號比其北端相鄰的風櫃近岸區強了許多,呈現出硬底質的岩石海床所具有 的地貌特徵。而從側掃聲納影像可以看到,影像中間有一條呈西北-東南走向的帶 狀波痕,其綿延的範圍約 400 公尺,可能是風櫃近岸區的表層沉積物有部份下坡 移動至此處的岩石海床上,這些沉積物受到此處西北-東南流向的底流影響而形成 了大型的帶狀波痕。由採集到的沉積物樣本可知,此處的表層沉積物為帶有生物 碎屑的砂質礫(圖 3-15)。
圖 3-14 側掃聲納影像圖,有明顯的波痕紋理分佈。
圖3-15 在中央水道區水深40公尺處採集到的表層沉積物,照片中田字形方格長寬 各2公分,上面的編號為採樣點編號。此沉積物樣本為帶有生物碎屑的砂質礫。
43
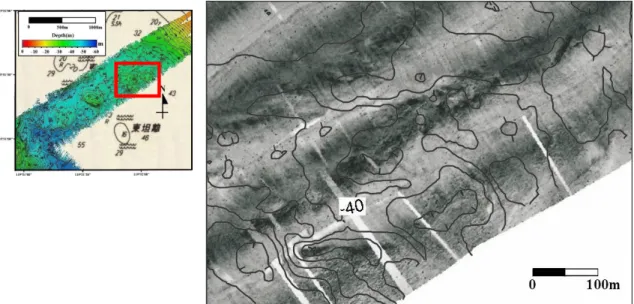
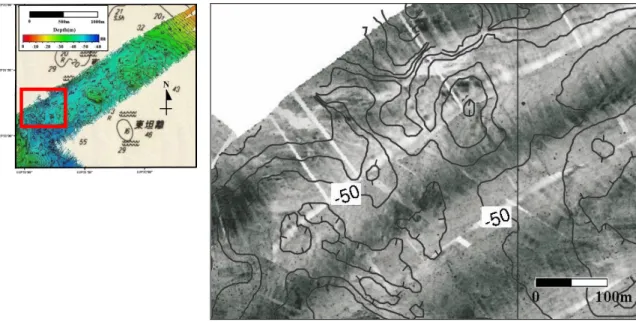
由圖 3-16、3-17、3-18、3-19 可以發現,此區的側掃聲納影像為灰色至深灰色,
顯示此處所接收到的回散射訊號非常強,呈現出硬底質的岩石海床所具有的地貌 特徵。 從影像中可以看到許多特殊的紋理分佈,像是圖 3-16 所呈現的影像範圍為 高區 1 所在區域,由於為硬底質的岩石海床,在影像上可以看到很多岩盤出露所 產生的紋理。而圖 3-17 的側掃聲納影像上方也可以看到非常明顯的大型岩盤出露 紋理,由等深線分佈可知此處等深線分佈較為密集,地勢變化較大,沉積物不容 易在此堆積覆蓋,才得以在影像上看到如此完整的岩盤出露。而在影像右側可看 到少許的條狀構造,這些條狀構造的長度約 20~80 公尺,整體綿延範圍達 110 公 尺,推測其形成的原因,可能是覆蓋在此處海床上的有機碎屑受到不同強度程度 的底流影響所致。從圖 3-18 的側掃聲納影像上可以發現,影像上方有些許的灰白 色長條棉絮狀紋理,這些棉絮狀紋理的長度從 50~200 公尺都有,推測其可能為火 成岩的露頭;而在圖 3-19 的側掃聲納影像上也可以看到許多由於岩盤出露所產生 的紋理,長度約 40~180 公尺,顯示此處海床上的表層沉積物較少,因此岩盤出露 的紋理分布相當多而廣泛。
此外,從此區的側掃聲納影像上也可以看到有些許黑色斑點紋理分佈(圖 3-16、3-17、3-18、3-19),且這些直徑約 1m 的黑色斑點在桶盤近岸區的側掃聲納 影像上也有出現,推測這些只出現在強回散射側掃聲納影像上的黑色班點紋理可 能是聲波打到生長在岩石海床上的群聚型珊瑚,經過反射及散射後所接收到的影 像。
44
圖 3-16 側掃聲納影像圖,有許多岩盤出露產生的紋理。
圖 3-17 側掃聲納影像圖,上方有明顯的岩盤出露,右側有少許條狀構造分佈。
45
圖 3-18 側掃聲納影像圖,上方的灰白色長條棉絮狀紋理為火成岩露頭。
圖 3-19 側掃聲納影像圖,有許多岩盤出露所產生的紋理。
46
第四章 第四章 第四章
第四章 海床 海床 海床生態與地形地貌的關係 海床 生態與地形地貌的關係 生態與地形地貌的關係 生態與地形地貌的關係
4-1 側掃聲納影像分類 側掃聲納影像分類 側掃聲納影像分類 側掃聲納影像分類 4-1-1 海床分類軟體介紹 海床分類軟體介紹 海床分類軟體介紹 海床分類軟體介紹
本章利用加拿大 QTC(Quester Tangent Corporation)公司所研發的 SwathView 軟體來進行研究區域側掃聲納影像的分類。SwathView 是一套可以有效辨別海床特 性的軟體,藉由軟體內所有的演算法來對海床的回散射訊號進行一系列的分析,
並依照聲學特性的不同將海床作分類。傳統的側掃聲納影像為黑白的灰階影像,
黑色表示能量較強,白色則是能量較弱,所以在側掃聲納影像上可以分為強反射 區(strong intensity)以及陰影區(shadow),這與一般視覺上的認知:陽光照射的反射 面為亮色、照不到陽光的陰影處為暗色剛好相反,因此為了能讓視覺上作更直接 的判定,SwathView 則將側掃聲納原始影像的灰階進行反轉,其所呈現出來的影像 為能量強的區域為白色,能量弱的區域則為黑色。
SwathView 的資料處理流程主要分為六大部份,分別是:
1. 載入檔案(load file)。
2. 補償影像(compensation)。
3. 建立分割矩形與產生特徵值。
4. 主成份分析法(PCA)分析。
5. K-means 分群、貝葉斯訊息準則。
6. 輸出。